On the Cover of HPL: Assembly and Metrology of NIF target subassemblies using robotic systems
1 March 2018
Last update: 28/02/18 10:29
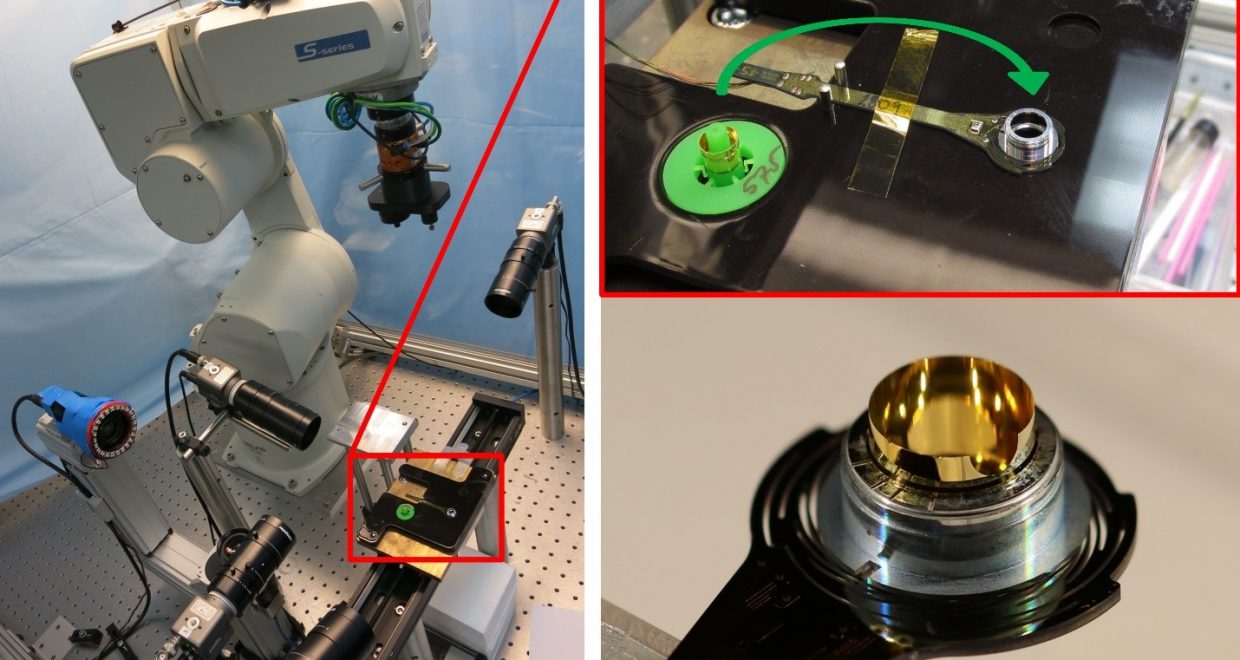
On the cover of HPL: ‘Assembly and metrology of NIF target subassemblies using robotic systems’, by K.-J. Boehm, N. Alexander, J. Anderson, L. Carlson, and M. Farrell.
When the first targets for the National Ignition Campaign (NIC) at Lawrence Livermore National Laboratory (LLNL) were built to be fielded on the National Ignition Facility (NIF) in the late 2000’s, the assemblies were handcrafted, meticulously measured, and carefully tested. The resulting assemblies were literally one-of-a-kind and fairly fragile pieces of art, as well as fully functional high energy density physics targets. They were true engineering marvels. The baseline target design was built on results from previous experiments on the NOVA facility; however, a steep learning curve during the early shots caused the target design requirements to be updated almost from shot to shot as the lessons from one experiment were applied to the next. At a shot rate of one or so per week of these complex implosion-type targets, the demand for targets was barely met by the target production supply chain.
Soon after the first implosion experiments on NIF, the need for tighter tolerances, higher complexity, and faster turnaround demanded that processes other than those depending on a select few extremely skilled craftsmen needed to be deployed to assemble these targets.
While the design of NIF implosion-type targets has significantly matured over the past decade, the increasing number of shots has resulted in an increasing demand for targets, although the production process is still relatively deliberate, with rarely more than ten identical targets being produced at a rate of one-per-day. Significant improvements for more efficient target assembly have been achieved by standardizing components and interfaces to the extent possible to simplify the design of fixtures, tooling and measurement algorithms.

Researchers, scientists, and engineers have been looking at established industries to find ways to simplify the production process further, e.g. deployment of automated or robot-assisted systems, to meet the increasing demand. Compared with other industries such as automotive or semiconductor branches, the number of targets to be produced is still low, however, which limits widespread deployment of automated systems.
The paper published in High Power Laser Science and Engineering, Vol. 5, No. 4, e25, 2017 (K.-J. Boehm et al., Assembly and metrology of NIF target subassemblies using robotic systems) shows an example in which assembly and metrology steps for a NIF target subassembly could be operationally simplified by moving to a robot-assisted platform. This leads to faster, more repeatable, and operator-independent results, but in many cases the cost of the development of an automated system needs to be balanced with the frequency at which the operation will be performed.
When the new laser facilities in Europe and around the world start operating at the expected rates of 1-10 Hz, the increased target demand will tip the balance in favor of robot-assisted or fully automated systems. In preparation for this new demand, General Atomics (GA) has started developing and testing these systems, demonstrating that high-rep-rate targets do not necessarily mean that the complexity of the target or target quality need to be compromised.
“As more and more inertial fusion research facilities come online across the world, assembly and metrology of increasingly more precise and smaller (micron to millimeter) components is becoming a key challenge with respect to high energy density physics experiments. Once the domain of large facilities, lasers have become more powerful, rep rated, smaller, and cheaper. This means the opportunity to perform experimentation in this arena is increasing, but it must be matched by the capability to provide many physics packages (targets) of various constructions to the materials scientists and engineers who support this field. Enter robotics and automation. Much like the automotive and electronics industry, our field will need to use automation to achieve higher volume, more precise assembly than can be achieved by human power. GA has been focused over the past decade on designing and building flexible robotics and metrology systems that can work with many materials and configurations.
GA is convinced these new laser facilities—coupled with existing facilities—provide immense potential for exploring the boundaries of high energy density physics, but only if the advancement in facility capability is matched by corresponding improvements in the creation of targets.”
– Michael Farrell, Director, Inertial Fusion Technology Division at General Atomics.
In the past decade, GA has used automation to increase its productivity rate to match the demand to build one or two NIF implosion type targets per week to more than one per day, while still maintaining extreme precision and quality in the construction of the targets. GA has also produced targets and target components supporting campaigns on other machines such as SLAC, Omega and the Z-pinch machine at Sandia National Laboratory in the US. Process improvements towards higher efficiency such as applying machine-assisted assembly techniques for flat foils benefits the entire community as the technology can be transferred from the platform it was developed for to others. The company plans to continue to explore automation’s ability to increase production rates in this field.
In conclusion, out of the many challenges the target fabrication community is facing for the coming years, such as target fielding, mitigation of debris, development of new materials and processes, the development of robotic capabilities is one important issue to be addressed.
Related Posts

International Women’s Day 2020: Influential women in STEM
International Women’s Day 2020 falls on Sunday, 8th March this year. In the run up to this date, each week day we’ll be highlighting one woman whose accomplishments in science, technology, engineering and/or mathematics not only elevated their fields but also took us one step closer to a gender-equal world. We hope you’ll join us […]

Where Physical and Digital Worlds Collide
In this blog for Data-Centric Engineering, Paul Clarke (Chief Technology Officer at Ocado) documents Ocado’s journey with building synthetic models of its business, its platforms and its underlying technologies, including the use of simulations, emulations, visualisations and digital twins. He explores the potential benefits of digital twins, including the opportunities for creating digital twins at […]

On the Cover of HPL: Research on cleanliness optimization of multisegment disk amplifier based on vectorized flow mode
Rigorous cleanliness on the National Ignition Facility (NIF) is essential to assure that 99.5% optical efficiency is maintained on each of its 192 beam lines by minimizing obscuration and contamination-induced laser damage.” said James A. Pryatel and William H. Gourdin from Akima Infrastructure Services and Lawrence Livermore National Laboratory

Elephants, Kings, and Comparison, a Conversation with Tom Trautmann
We invited Trautmann to tell us why he writes about Indian war elephants, and how. He touched on several topics in the process: the value of analytical accidents, the recovery of lost knowledge systems, and the power and pluralism of human logics.