


Nomenclature
- ABC
-
Artificial Bee Colony
- AC
-
air cooled
- AAM
-
advanced air mobiltiy
- AI
-
artificial intelligence
- APF
-
artificial potential field
- BaFA
-
back-and-forth algorithm
- BEC
-
battery eliminator circuit
- BiCC
-
bipartite cooperative coevolution
- BMS
-
battery management systems
- CFD
-
computational fluid dynamics
- DMFC
-
direct methanol fuel cell
- DPA
-
dijkstra’s path algorithm
- DC
-
direct current
- EEA *
-
energy efficient A*
- EMS
-
energy management system
- ECMS
-
equivalent consumption minimisation strategy
- EEMS
-
external energy maximisation strategy
- ESC
-
electronic speed control
-
E
 ${M^2}$
CPP
${M^2}$
CPP
-
energy-aware multi-uav multi-area coverage path planning
- EOL
-
end-of-life
- EAOA
-
energy-aware obstacle avoidance
- EaPP
-
energy-aware path planning
- FNNSCP
-
A fuzzy neural network adaptive sequential convex optimisation
- FL
-
fuzzy logic
- GPS
-
Global Position System
- GA
-
genetic algorithm
- GNSS
-
Global Navigation Satellite Systems
- HMPC
-
hierarchical model predictive control
- LC
-
liquid cooled
- MPC
-
model predictive control
- ML
-
machine laearning
- mCPP
-
multi-UAV coverage path planning
- MO-GA
-
multi objective-genetic algorithm
- MOT
-
maximum operating temperature
- NFZs
-
non-flying zones
- OGSE
-
online generalised shape expansion
- OSD
-
on screen display
- I-PSO
-
improved particle swarm optimisation
- I
-
current
- PID
-
proportional integral derivative
- PPS
-
parallel partitioning along a side
- P
-
power
- PRM
-
probabilistic roadmap
- PEMFC
-
proton-exchange membrane fuel cell
- RL
-
reinforcement learning
- RRT
-
rapidly exploring random tree
- RUL
-
remaining useful life
- SOC
-
state-of-charge
- SOFC
-
solid oxide fuel cell
- SOH
-
state-of-health
- SARSA
-
state–action–reward–state–action
- TIG
-
thermionic generator
- TEG
-
thermoelectric generator
- UAV
-
unmanned arial vehicle
- UAM
-
urban air mobility
- VTOL
-
verticle take-off landing
- V
-
voltage

Other nomenclature and symbols are defined as they appear.
1.0 Introduction
In recent years, unmanned aerial vehicle (UAV) applications rapidly expanded and have a high volume in aeronautics [Reference Wandelt, Wang, Zheng and Sun1]. UAVs are used in many areas such as infrastructure monitoring and inspection, defence and security, emergency response, environmental studies, earth sciences and commercial applications [Reference Sabour, Jafary and Nematiyan2–Reference Messaoudi, Oubbati, Rachedi, Lakas, Bendouma and Chaib5]. The UAV market size has grown from approximately $15 billion in 2018 to $40 billion in 2024 [Reference Mohsan, Othman, Li, Alsharif and Khan6]. It is predicted that the UAV market size will reach about $90 billion over the next decade [Reference Ghamari, Rangel, Mehrubeoglu, Tewolde and Sherratt7]. As technological developments in sensors, embedded systems, microprocessors, batteries and fuel cells continue to advance, the market size of UAVs will also increase simultaneously.
UAVs can be classified according to wing type, take-off mass, range, altitude, propulsion type and mission [Reference Alghamdi, Munir and La8, Reference Chamola, Kotesh, Agarwal, Gupta and Guizani9]. Small-type unmanned vehicles are defined as those having a take-off mass of 25–150 kg, a range of less than 50 km, and an altitude of no more than 3,000 m [Reference Mitridis, Kapsalis, Terzis and Panagiotou10, Reference Hassanalian and Abdelkefi11]. However, regardless of the type of UAV, the long flight duration and high payload capacity are required in many applications, such as surveillance and monitoring, that use unmanned aerial vehicles [Reference Coopmans, Slack, Schwemmer, Vance, Beckwith and Robinson12]. In this regard, hydrogen-powered UAVs have attracted a lot of attention recently since the current lithium-based battery technology limits the flight time and payload capacity of small UAVs [Reference Mus, Madhav, Vanierschot, Vandeginste and Buysschaert13–Reference Mariscal, Depcik, Chao, Wu and Li15]. The main reasons for this are that fuel cells can produce power as they are fuelled and have a higher energy density (Wh/kg) than batteries [Reference Aminudin, Kamarudin, Lim, Majilan, Masdar and Shaari16, Reference Alpaslan, Karaoğglan and Colpan17]. Among the top research topics in hydrogen-powered UAVs are energy management and energy-aware path planning, which guarantee safe and effective flight.
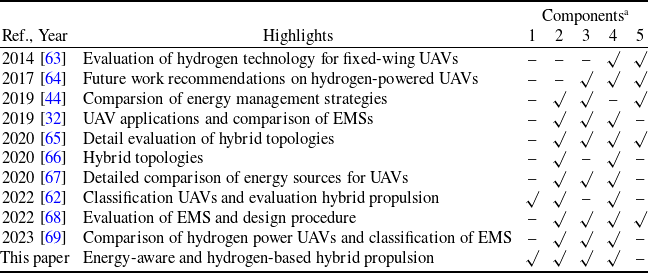
Although several review papers address UAV path planning (Table 1), no detailed study has been conducted considering the energy-aware path planning for UAVs. Moreover, existing energy-aware path planning studies only focus on battery-powered UAVs. In this context, this study presents detailed research on energy-aware path planning for hydrogen-powered UAVs. Furthermore, it examines the integration of energy management and energy-aware path planning for UAVs with hybrid propulsion. Thus, this study aims to highlight the importance of energy-aware path planning for hydrogen-powered small UAVs (powered solely by fuel cells or hybridised with batteries). Firstly, it presents an overview of hydrogen-powered UAVs, energy-aware path planning, and energy management, in addition to the motivation and contribution of this paper. It then assesses the review papers on energy management and energy-aware path planning for UAVs with hybrid propulsion. Afterward, this study reviews commercial examples of hydrogen-powered UAVs with prominent fuel cell manufacturers. An important contribution of this paper is the identification of key research gaps to guide future investigations aimed at unlocking the full potential of hydrogen-powered UAVs for long-endurance and sustainable applications.
Comparison of existing review studies on path planning of UAVs
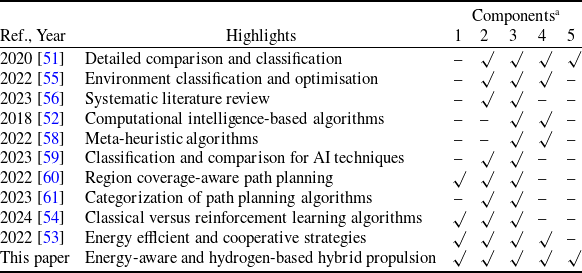
a Remark for the column of components the listed review studies incorporate/compare: 1 - energy-aware operation, 2 - comparing applications, 3 - suggesting future research direction, 4 - discussing challenges, 5 - including UAV system description.
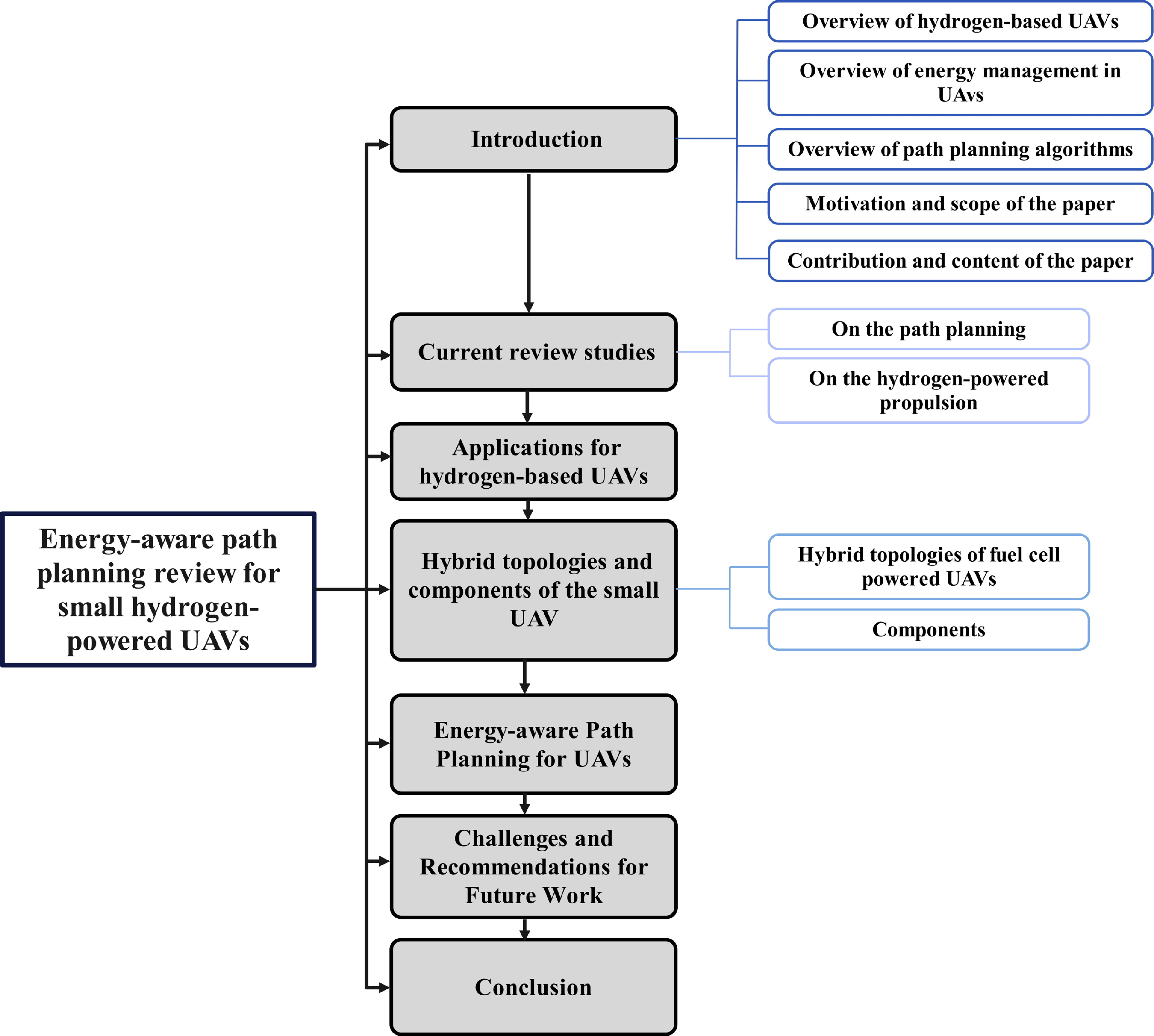
Figure 1 illustrates the structure of this study. Accordingly, the remainder of this paper is organised as follows: the introduction presents overviews of path planning, energy management and hydrogen-based UAVs, along with this paper’s contribution and motivation. In Section 2.0, the current review papers on energy management and energy-aware path planning are evaluated. Section 3.0 discusses applications of hydrogen-based UAVs. Then, Section 4.0 explains the hybrid topologies and components of the small UAV. Section 5.0 reviews energy-aware path planning for UAVs. Following this, Section 6.0 proposes recommendations for future work on energy-aware path planning. Finally, the conclusions are presented in Section 7.0.
The structure of this study.
1.1 Overview of hydrogen-based UAVs
In the fully electric propulsion systems of UAVs, proton exchange membrane (PEM), direct methanol (DM) and solid oxide (SO) fuel cells act as an alternative energy source to batteries [Reference Rehan, Akram, Shahzad, Shams and Ali18]. The most prevalent of these in small-type UAVs are PEMFCs. They are gaining attention in UAVs with fully electric power systems due to their higher energy density compared to batteries. For example, Ref. [Reference Huang, Li, Ma, Huang, Zheng and Song19] compares the energy density of batteries and fuel cells. Accordingly, in current technology, lithium-based batteries have an energy density of 130–200 Wh/kg, while a proton exchange fuel cell has an energy density of 600–1,000 Wh/kg. Forecast studies on the application of fuel cells in aviation have been presented in the Refs [Reference Kiesewetter, Shakib, Singh, Rahman, Khandelwal, Kumar and Shah20, Reference Ahluwalia, Peng, Wang, Papadias and Kopasz21]. According to these studies, some projections suggest that by 2050, electric aircraft could be powered solely by fuel cells. Notably, in the last few years, scientific publications and applications that use fuel cells in small UAVs have increased significantly. Concurrently with developments in small UAVs, companies such as Honeywell [22], ZEROe [23], Cranfield Aerospace Solutions [24], ZEROAVIA [25], Rolls Royce [26, Reference Jupp27], Skyleader 150UL [Reference Romeo and Borello28], and H2FLY [29] have initiated numerous projects related to fuel cell-powered large-scale aircraft. However, fuel cells are mostly used in hybrid systems in aircraft due to their shortage (as well as research gaps) listed below. These hybrid systems are mostly created with batteries, but there are also examples of hybridisation with jet engines [Reference Santin, Traverso and Massardo30]. The following key challenges are highlighted:
-
• Low power density: Fuel cells have lower power density compared to batteries. The power density of PEMFC, SOFC and DMFC stacks is typically less than 800 W/kg [Reference Yin, Hua, Nie, Yang and Tang31, Reference Boukoberine, Zhou and Benbouzid32]. For this reason, they may be insufficient, especially in flight phases that require high-demand power, such as take-off and sudden manoeuvres.
-
• Storage of hydrogen: Hydrogen can be utilised in aviation as
$Liquid{H_2}$
and
$Gas{H_2}$
. Although the energy density of
$L{H_2}$
is approximately three times higher than that of
$G{H_2}$
,
$L{H_2}$
must be stored at a cryogenic temperature of 20 K. On the other hand,
$G{H_2}$
requires a storage pressure of 300–800 bar, whereas
$L{H_2}$
is stored at just two bar [Reference Adler and Martins33, Reference Franke, Kazula and Enghardt34]. In other words, both forms of hydrogen contain significant storage and handling challenges that must be addressed for aviation applications. -
• Gravimetric energy density: Currently, the power-to-mass ratio of commercially available PEM fuel cells for small-scale applications ranges from 200 to 1,000 W/kg, while the energy-to-mass ratio ranges from 200 to 2000 Wh/kg [Reference Oh35]. Since they have a direct impact on an aircraft’s payload capacity and flight duration, these factors ought to be developed jointly.
-
• Start-up delay: The relatively short start-up time of PEMFCs is one of the factors that make them superior to DMFCs and SOFCs in small UAVs [Reference Bayrak, Kaya and Oksuztepe36]. The Ref. [Reference Kim, Oh and Kwon37] stated that a PEMFC requires 25 minutes to reach its optimal operating temperature. The start-up delay of fuel cells under varying operating conditions in UAVs is a critical performance metric that requires thorough examination [Reference Huang, Shen, Chan and Tu38, Reference Amamou, Kandidayeni, Boulon and Kelouwani39].
-
• Low dynamic response time: Aircraft exhibit more variable demand power than on-road and marine vehicles. Therefore, the dynamic response times of the fuel cells must be minimised in their aircraft propulsion system. The EaPP and EMS algorithms of hydrogen-powered UAVs should consider the impact of altitude on the fuel cell’s response time.
-
• Altitude effect: Altitude is a key parameter that directly influences fuel cell output power [Reference González-Espasandn, Leo, Raso and Navarro40]. Therefore, the impact of altitude changes on fuel cell performance and the corresponding fuel cell control mechanisms should be considered in the design of fuel cell-powered UAVs. In the dynamic model established in the Ref. [Reference Gong, Xing, Liang and Tu41], as the altitude increases from 0 to 4,000 m, the decline rate in output power of the PEMFC is 4.7%.
-
• Degradation and aging time: Fuel cell aging and lifetime are critical factors, especially in aircraft that perform consecutive missions (e.g., urban air mobility). Therefore, predicting parameters such as aging, output power, state of health and remaining useful life for fuel cells is necessary for the safe operation of aircraft [Reference Ebner and Koops42].







Due to the shortcomings described above, fuel cells are often integrated with batteries in the propulsion systems of small UAVs. In this way, hybrid systems that utilise a fuel cell as the primary power source and batteries as an auxiliary source significantly improve flight time and range compared to battery-only systems. However, such propulsion systems with multiple energy sources have a more complex structure and require an energy management unit and energy-aware path planner.
1.2 Overview of energy management in UAVs
Hybrid propulsion-powered UAVs need a suitable energy management system for efficient, sustainable, and safe flight operations. An energy management system facilitates efficient allocation of the aircraft’s demand power among the energy components, hence ensuring the safe flight of the vehicle. In addition, managing and controlling the aging and degradation of the energy components in the hybrid power system is the responsibility of the energy management unit. Energy management algorithms are classified into three main groups: rule-based, optimisation-based and learning-based. The shortcomings in energy management of UAVs with hybrid propulsion systems are listed below.
-
• Real-time applicability: The first active energy management application in a hybrid UAV was achieved by Bohwa Lee et al. in 2014 [Reference Lee, Kwon, Park and Kim43]. Since then, due to the low computational burden in energy management applications, rule-based algorithms have received the majority of attention in actual flight research, with algorithms that rely on learning and optimisation receiving less attention.
-
• Computational burden: The computational burden of the energy management algorithm directly affects its real-time applicability [Reference Boukoberine, Zhou and Benbouzid32]. All rule-based energy management algorithms are deterministic and have a low computational burden [Reference Tao, Zhou, Zicun and Zhang44]. Among the optimisation-based ones, equivalent consumption minimisation strategy (ECMS) and model predictive control (MPC) may have low computational burden. Similarly, fuzzy logic (FL) may have a low computational burden in the intelligent-based ones [Reference Tao, Zhou, Zicun and Zhang44].
-
• Optimality and robustness: The development of hybrid algorithms may lead to more optimal and robust energy management. For example, the Ref. [Reference Lei, Wang, Jin, Min, Zhang and Zhang45] uses FL together with the rule-based energy management algorithm to increase its robustness. Similarly, in the Ref. [Reference Boukoberine, Donateo and Benbouzid46], the GA and the rule-based algorithm are used together to increase robustness and optimality.
-
• Efficiency: The efficiency of the energy management algorithm can be defined as the ratio of the demand power of the UAV to the total power provided by the energy components [Reference Quan, Li, Liu, Li, Chang and Yan47]. As the efficiency of the energy management algorithm increases, fuel consumption (possibly hydrogen) decreases. Thus, future works should focus on high-efficiency algorithms for low fuel consumption.
-
• Considering degradation and aging: Ensuring the safe flight of unmanned aerial vehicles (UAVs) requires monitoring the health status of energy components in their power system. Thus, health status parameters such as RUL, SOH, SOC, MOT and EOL should be considered in energy management algorithms. Additionally, to improve resistance against aging and degradation of energy components, power sharing in a hybrid system should consider these indicators.
-
• Considering path planning: Studies in the literature consider mostly the energy management of UAVs with all-electric hybrid propulsion systems independently of path planning. However, a more realistic approach would be to consider together energy management with a path-planning algorithm that includes the dynamic structure of energy sources to guarantee high-energy-efficiency autonomous flight by reducing fuel consumption. Although few studies have focused on this point in recent years (example:(Reference Tian, Zhang and Yang48–Reference Liu, Yao, Wang, Qin and Li50), there is still a research gap about coordinated controller algorithms for hydrogen-powered UAVs.
In conclusion, numerous simulations and real-time flight-based research have been carried out since the first active energy management algorithm was successfully implemented in a hydrogen-powered UAV in 2014 [Reference Lee, Kwon, Park and Kim43]. However, by taking into account the highlighted important points, future research should look into energy-aware path planning in the energy management of hydrogen-powered UAVs. The safe and efficient flight of a UAV with a hybrid propulsion system depends on cooperative algorithms that take path planning into account. Furthermore, these cooperative algorithms guarantee the UAV’s autonomous flight.
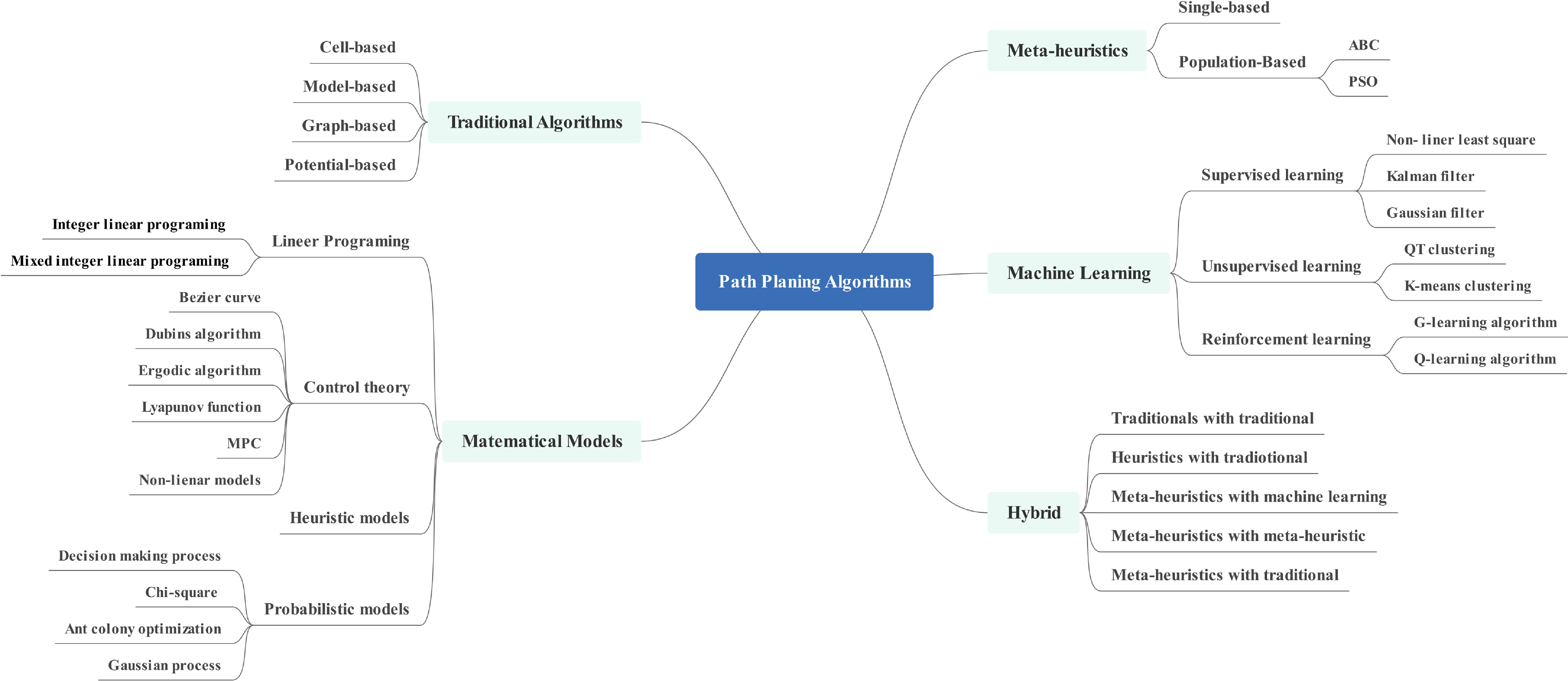
1.3 Overview of path planning algorithms
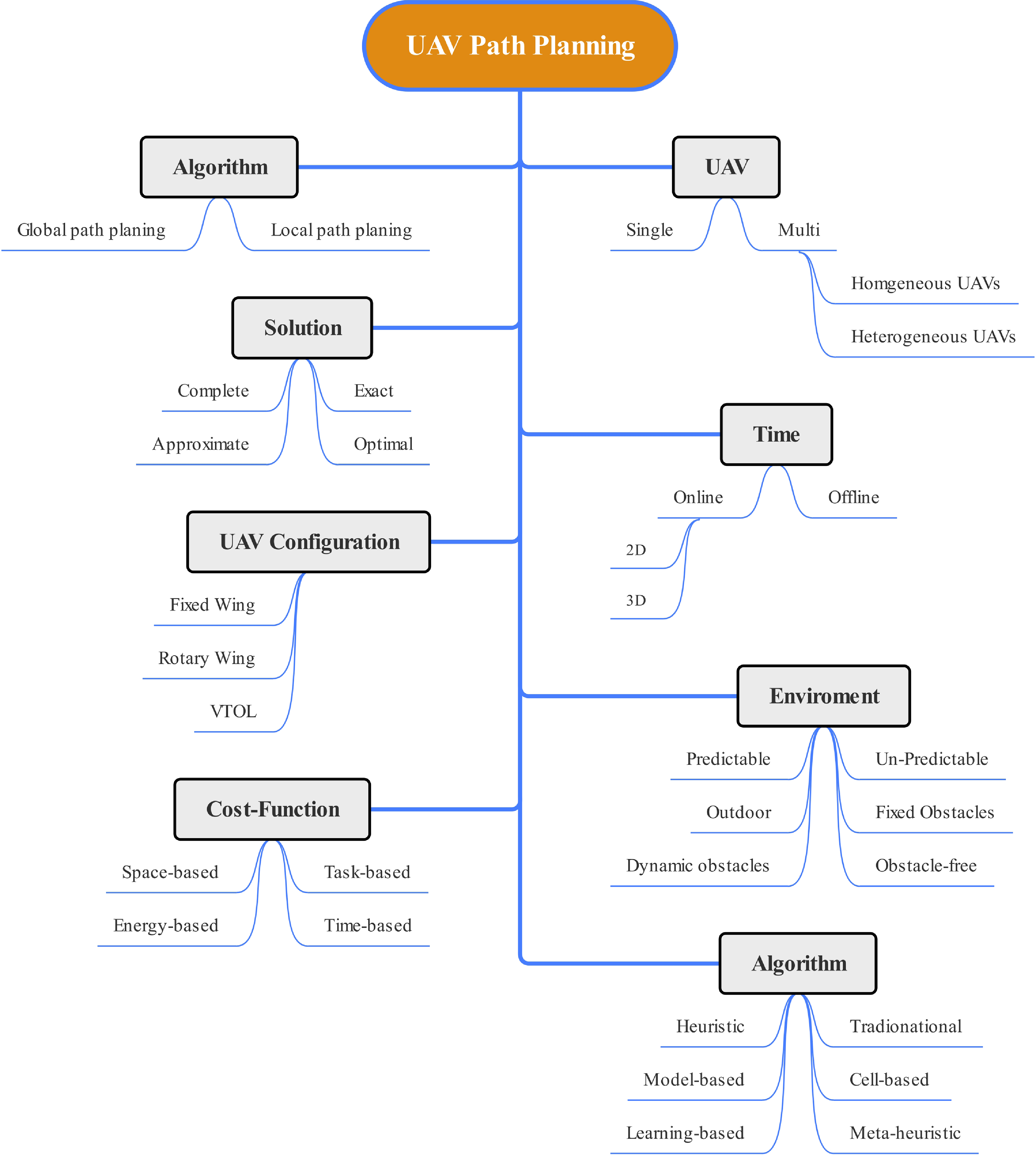
The structural complexity of hybrid systems combining hydrogen fuel cells and batteries adds complexity to the UAV’s electronic architecture. This often results in trade-offs between energy capacity, range and payload, requiring adaptive path-planning strategies that consider these limitations. Additionally, for autonomous flights, hydrogen-powered UAVs should have an energy management controller in addition to an energy-aware path planning controller. Path planning tasks in UAVs can be defined as determining the path and motion of a UAV from a starting point to a final point under certain objectives. These objectives generally include minimum energy, time, path length and collision avoidance. The main challenges on UAV path planning tasks are optimum path length, optimality, completeness, cos-efficiency, time-efficiency, energy efficiency, safety, robustness and collision avoidance [Reference Aggarwal and Kumar51]. These challenges can vary according to the mission of the UAV. For example, the algorithm to be applied for path planning may depend on whether the obstacles in the environment are fixed or dynamic, the objective function, and the UAV type. However, any path planning algorithm must meet criteria such as stealth, physical feasibility, performance of mission, safety and real-time implementation [Reference Zhao, Zheng and Liu52]. Figure 2 shows the classification of UAV path planning algorithms. The shortcomings in the path planning of UAVs with hybrid propulsion systems are listed as considering energy management, energy-aware path planning, multiple UAV communications and real-time applicability.
The classification of UAV path planning.
1.4 Motivation and scope of the paper
UAV flight time is limited by the power-energy densities that can be achieved with current battery technology. Fuel cells can be considered as a solution. However, fuel cells are usually used in hybrid propulsion systems with batteries rather than alone because of their low power density, slow response time and start-up delay. The challenge of managing the power flow emerges in these hybrid systems. Many energy-power management algorithms have been developed in the literature to deal with this problem. At the same time, many review papers focused on this challenge have been published in recent years. However, to the best of our knowledge, no review paper deals with jointly the energy management and path planning of UAVs with hybrid power systems. This is the first motivation of this study.
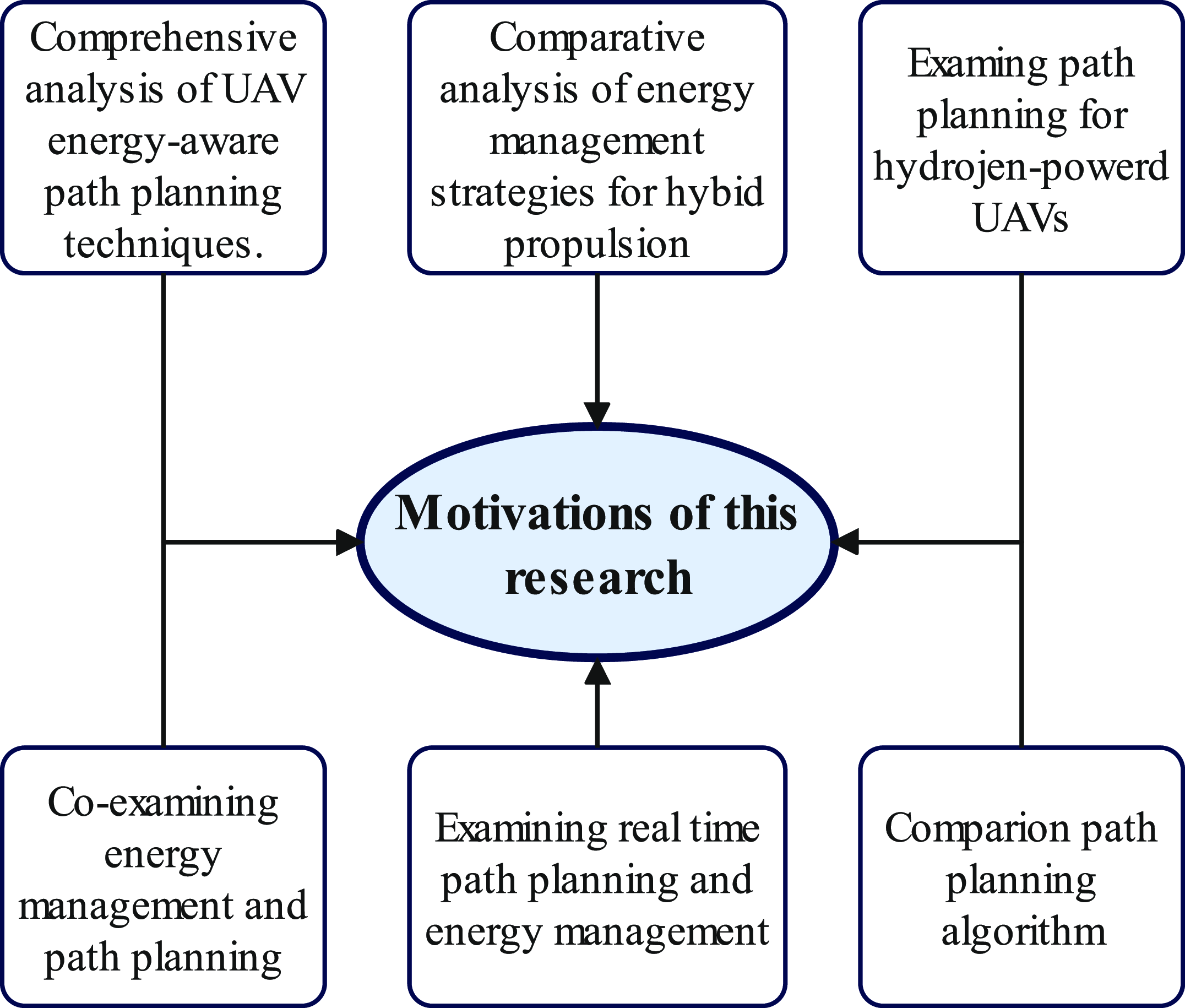
Path planning algorithms in UAVs intensively deal with finding optimum path length, path conflict, optimality, completeness, cost-efficiency, time efficiency, energy efficiency, robustness, collision avoidance, safety, real-time applicability and multi-UAVs. Among these challenges, energy-aware path planning is even more important for UAVs with hybrid power systems because limited energy must be used most efficiently. Since there are not many studies on energy-aware path planning in UAVs, more research is needed. To sum up, this constitutes the second motivation of this study. Furthermore, the third motivation for this study is to investigate energy-aware path planning in hydrogen-based hybrid propulsion systems. Figure 3 summarises the motivations of this study.
The motivations for this study.
1.5 Contribution and content of the paper
This paper aims to review studies on energy-aware path planning as well as to consider energy management and path planning together for hydrogen-powered hybrid UAVs. To the best of our knowledge, no comprehensive review study discusses energy-aware path planning for hybrid-powered UAVs, even though many studies separately take path planning or energy management for UAVs into consideration. So, this study addresses path planning and energy management in hybrid UAVs together for the first time as a review study. As a result, this study contributes to developing energy-aware path-planning algorithms and considering path planning together with energy management in hybrid UAVs. The main contributions of this study are as follows:
-
• This study discusses thoroughly energy-aware path planning algorithms for small unmanned aerial vehicles with hydrogen-powered hybrid propulsion.
-
• This study considers both energy management and path planning for small UAVs with hybrid propulsion systems.
-
• The algorithms used for energy management and path planning of hydrogen-powered hybrid propulsion small UAVs are compared, and research gaps are presented.
-
• It assesses the limitations in energy management, hydrogen propulsion, and energy-aware path planning for small UAVs and offers thorough suggestions for future research.
-
• By assessing current technologies, it investigates the electrical system components of small UAVs powered by hydrogen.
-
• It evaluates the application examples and usage areas of small UAVs with hydrogen-powered propulsion systems.
-
• It contrasts top producers of hydrogen-powered small UAVs and fuel cell technology.
-
• This study compares fuel cell-powered hybrid system topologies by giving examples of their application.
In summary, this study provides a comprehensive review of the existing literature on energy management and energy-aware path planning in hydrogen-powered UAVs. Thus, it is expected to contribute to the development of adaptive energy-aware path planning algorithms that incorporate energy management for hydrogen-powered UAVs.
2.0 Current review studies
Since this paper advocates the combined consideration of hydrogen-based propulsion and path planning to increase the flight time and payload capacity of UAVs, review papers on these topics are mentioned in this section.
2.1 On the path planning
Table 1 summarises the most prominent review papers on the path planning of UAVs. Accordingly, these review studies are compared in terms of whether they address the topics of energy-aware operation, comparing applications, suggesting future research direction, discussing challenges and including UAV system description. Among these, in Refs [Reference Fevgas, Lagkas, Argyriou and Sarigiannidis53, Reference Mannan, Obaidat, Mahmood, Ahmad and Ahmad54], the topic of energy awareness in path planning of UAVs is slightly touched upon, but to the best of our knowledge, no review paper has considered energy-aware path planning in fuel cell-powered UAVs.
Many significant review papers have been published on path planning for UAVs. For example, Ref. [Reference Shahid, Abrar, Ajmal, Masroor, Amjad and Jeelani55] has emphasised that there are research gaps in online path planning, energy-efficient path planning, multiple UAVs communication, path planning in complex environments, implementing UAVs in other fields, increasing storage capacity in multi-spectral UAVs and mesh of drones. In Ref. [Reference ul Husnain, Mokhtar, Mohamed Shah, Dahari and Iwahashi56], the authors present a systematic literature review comparing 90 publications obtained with autonomous, path planning and UAV keywords in terms of 20 parameters. Reference (Reference Zhao, Zheng and Liu52) presents a review examining 231 studies on computational-intelligence-based path planning of UAVs in terms of time domain and environment model. Reference (Reference Ait Saadi, Soukane, Meraihi, Benmessaoud Gabis, Mirjalili and Ramdane-Cherif57) categorised path planning algorithms for UAVs into five main categories: classical methods, heuristics, meta-heuristics, machine learning and hybrid algorithms, and presents a comparative review study. In Ref. [Reference Yahia and Mohammed58], the authors present a systematic review of meta-heuristic-based path planning. Reference (Reference Puente-Castro, Rivero, Pazos and Fernandez-Blanco59) provides a comprehensive review of artificial intelligence methods applied in path planning for UAVs, categorising them into four groups: reinforcement learning (RL) techniques, evolutive computing techniques, swarm intelligence techniques and graph neural networks (GNN). Reference (Reference Kumar and Kumar60) has conducted a detailed comparative study on region coverage-aware unmanned aerial route planning considering a three-dimensional environment and dynamic coverage. Reference (Reference Luo, Tian and Wang61) classifies innovative path-planning algorithms and discusses their implementation challenges, advantages and disadvantages. In Ref. [Reference Mannan, Obaidat, Mahmood, Ahmad and Ahmad54], the authors have divided path planning algorithms into two general categories, classical and reinforcement and have conducted a comparative review of these two groups.
2.2 On the hydrogen-powered propulsion
Table2 compares the review papers on energy management and fuel cell technology of hydrogen-powered unmanned aerial vehicles. This comparison is based on the topics; the path planning, energy management, UAV system components and hybrid typologies, hydrogen storage technologies and conceptual design for hybrid propulsion. None of these review studies has addressed the topic of energy-aware path planning in detail, except for the suggestions for future works in Ref. [Reference Zhang, Qiu, Chen, Li, Liu, Liu, Zhang and Hwa62]. As mentioned in the Ref. [Reference Zhang, Qiu, Chen, Li, Liu, Liu, Zhang and Hwa62], energy management and path planning should be investigated together to improve the limited flight time of unmanned aerial vehicles.
Comparison of existing review studies on hydrogen-powered UAVs
a Remark for the column of components the listed review studies incorporate/compare: 1 - path planning, 2 - energy management, 3 - UAV system component and hybrid typologies, 4 - hydrogen storage technologies, 5 - conceptual design for hybrid propulsion.
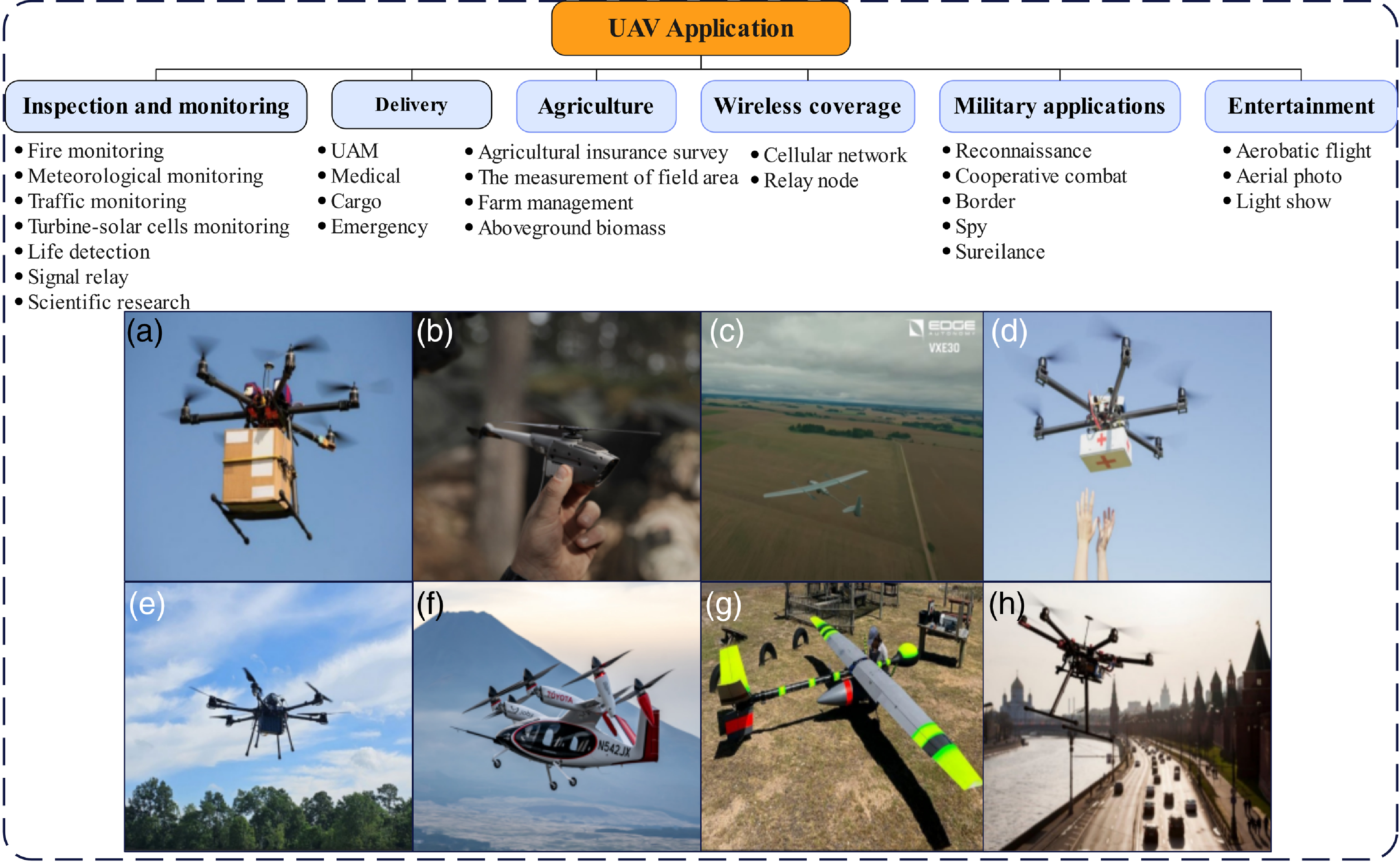
UAV application areas and some examples of hydrogen-powered UAVs. a: delivery, b: spy, c: agriculture, d: emergency, e: inspection and surveying, f: UAM, g: agriculture, deployment of biocontrols, h: inspection. (adapted from Refs [Reference Boukoberine, Zhou and Benbouzid32, Reference Zhang, Qiu, Chen, Li, Liu, Liu, Zhang and Hwa62, Reference Xu, Huangfu, Ma, Xie, Song, Zhao, Yang, Wang and Xu68] (pictures for Refs [Reference Boukoberine, Zhou and Benbouzid32, Reference Boukoberine, Zhou and Benbouzid32, 73–77]).
3.0 Applications for hydrogen-based uavs
Small UAVs are currently a commercialised product used in many military and civilian areas. As UAVs’ payload capacity and flight durability increase, their usage will also increase simultaneously [Reference Mariscal, Depcik, Chao, Wu and Li15, Reference Huang, Li, Ma, Huang, Zheng and Song19, Reference Marqués, Montero, Sánchez-Diaz and Quintanilla70]. To improve these UAV characteristics, fuel cell hybridisation or only fuel cell-powered propulsion has increased the use of unmanned aerial vehicles in civil and military applications. In addition to flight durability, the level of autonomy of UAVs is another characteristic that directly affects the intensity of their use [Reference Mahmoud Zadeh, Powers and Bairam Zadeh71]. With advances in autonomy, we may run into the use of small UAVs in many new areas.
The applications of small unmanned aerial vehicles can be broadly classified as inspection and monitoring, delivery, agriculture, wireless coverage, military and entertainment. Figure4 summarises the leading commercial applications of fuel cell-powered unmanned aerial vehicles with their mission. In (Reference Oladosu, Pasupuleti, Kiong, Koh and Yusaf72) Refs [Reference Çnar, Kandemir and Donateo69] comprehensive reviews of the literature on fuel cell-powered UAVs are provided.
With the developments in energy storage and transform areas in recent years, hydrogen-based UAVs have now become commercial. The leading ones are shown in Table 3. They participate mostly in delivery, education, surveillance, inspection, agriculture and monitoring. Hydrogen-based propulsion is not limited to small UAVs but is now a potential solution to fossil fuels for aircraft of all sizes. Hydrogen-based propulsion systems are being designed for passenger transport, especially in urban air mobility. For example, the VTOL aircraft called AMSL Vertiia made its first flight in 2024 and has a range of up to 1,000 km. Additionally, the tilt-wing type hydrogen-powered eVTOL vehicle that Joby developed for UAM has completed successfully flight tests.
Examples of fuel cell-powered commercialised UAVs
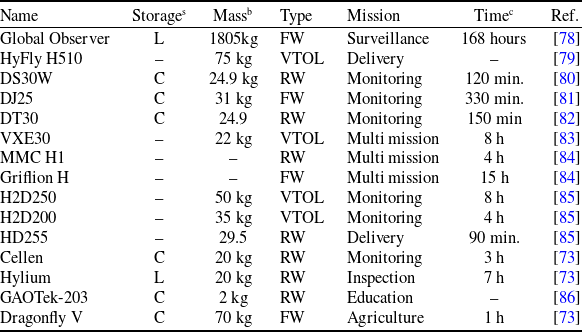
a L: liquid, C: compressed;
b Take-off mass;
c Estimated flight time
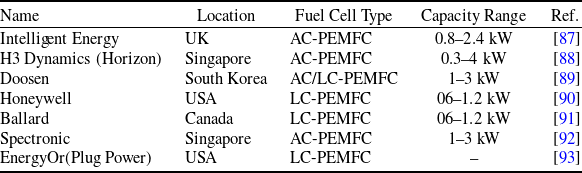
Table 4 lists leading fuel cell producers for small unmanned aerial vehicles. This table only lists companies that produce fuel cells for small UAVs. Among these, intelligent energy offers air-cooled fuel cells in three different capacities named IR-SOAR 800, IE-SOAR 1.2 and IE-SOAR 2.4. These fuel cell module masses (excluding tank) are 1,450, 2,700, and 4,800 grams, respectively. Also, they operate between −5 and 40
 ${{\rm{\;}}^ \circ }$
C degrees and can robustly provide energy up to 3,000 m altitude. Using the IE-SOAR 800, a maximum flight time of 15.6 hours was achieved in an unmanned aerial vehicle with a total take-off mass of 7.4 kg. The operating voltage range of the IE-SOAR 800 is 24–48 V, while the other two fuel cells are 50–70 V. Another leading fuel cell manufacturer is Horizon Fuel Cell Technologies, and Its subsidiary for small UAVs is H3 dynamics, which manufactures Aerocell 300–4000 air-cooled PEM fuel cells in various power capacities. The masses of these fuel cells range from 0.72 kg to 6 kg. Their specific power and power density of them are 550 W/kg and 230 W/L, respectively. Combining these fuel cells with suitable batteries can create hybrid power systems. For example, Doosan is a company that offers such a hybrid system. Doosan offers powerpack products called DP30M2S, DM30M2S and DM 15, which include the air-cooled fuel cell and the battery. Their masses are 6.9 kg, 11.1 kg and 8 kg, respectively, and the first two of them are designed for rotary-wing UAVs and the third for fixed-wing UAVs. The rated powers of these power packs are 2.7 kW, 2.7 kW and 1.25 kW, respectively. Also, Doosen is studying liquid-cooled fuel cell systems. Finally, Honeywell has two water-cooled fuel cell packs with masses of 1.8 kg and 4 kg and continuous output powers of 600 W and 1,200 W.
${{\rm{\;}}^ \circ }$
C degrees and can robustly provide energy up to 3,000 m altitude. Using the IE-SOAR 800, a maximum flight time of 15.6 hours was achieved in an unmanned aerial vehicle with a total take-off mass of 7.4 kg. The operating voltage range of the IE-SOAR 800 is 24–48 V, while the other two fuel cells are 50–70 V. Another leading fuel cell manufacturer is Horizon Fuel Cell Technologies, and Its subsidiary for small UAVs is H3 dynamics, which manufactures Aerocell 300–4000 air-cooled PEM fuel cells in various power capacities. The masses of these fuel cells range from 0.72 kg to 6 kg. Their specific power and power density of them are 550 W/kg and 230 W/L, respectively. Combining these fuel cells with suitable batteries can create hybrid power systems. For example, Doosan is a company that offers such a hybrid system. Doosan offers powerpack products called DP30M2S, DM30M2S and DM 15, which include the air-cooled fuel cell and the battery. Their masses are 6.9 kg, 11.1 kg and 8 kg, respectively, and the first two of them are designed for rotary-wing UAVs and the third for fixed-wing UAVs. The rated powers of these power packs are 2.7 kW, 2.7 kW and 1.25 kW, respectively. Also, Doosen is studying liquid-cooled fuel cell systems. Finally, Honeywell has two water-cooled fuel cell packs with masses of 1.8 kg and 4 kg and continuous output powers of 600 W and 1,200 W.
List of leading manufacturers of fuel cell-based power banks for UAVs
4.0 Hybrid topologies and components of small uavs
4.1 Hybrid topologies of fuel cell powered UAVs
The UAVs generally use three different types of fuel cells: PEMFC, SOFC and DMFC. Especially in small-type unmanned aerial vehicles, PEMFCs are mostly preferred due to their low operation temperature and relatively high energy density. The restrictions to implementing PEMFCs alone in a propulsion system are mentioned in the introduction section of this study. These restrictions can be addressed by creating hybrid power systems, where batteries serve as the secondary energy source and fuel cells serve as the main energy source. Although the literature contains examples of hybrid systems that combine fuel cells with solar cells and supercapacitors, fuel cells are typically used in conjunction with batteries. Solar cells are only suitable for unmanned aerial vehicles with large wing areas. The configurations of hybrid system topologies with multiple energy components in this way are summarised in detail in Refs [Reference Tao, Zhou, Zicun and Zhang44, Reference Wang, Zhao, Li, Wang, Huang, You and Becker65, Reference Çnar, Kandemir and Donateo69]. This study only considers hybrid power systems that include batteries and fuel cells. These hybrid system topologies are given in Fig.5. Also, Table 5 evaluates fuel cell-driven power systems and prominent literature examples (only experimental ones).
Fuel cell powered propulsion system topologies (a and c: passive control b, d, and e: active control).
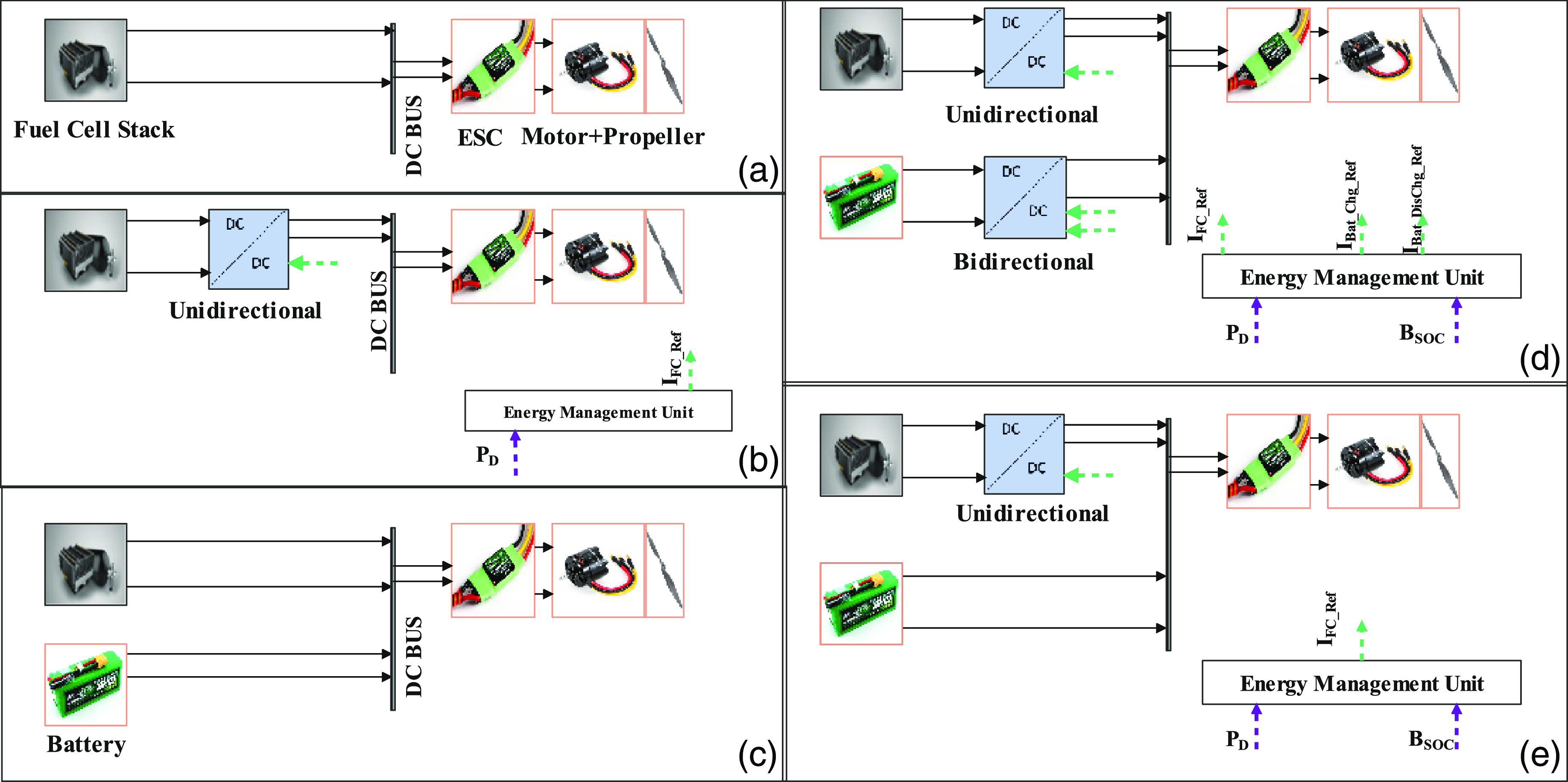
Comparison of fuel cell-based hybrid topologies and application examples
(a and c: passive control b, d, and e: active control).
Categorisation of electronic components for fixed and rotary wing UAVs.
In Fig.5, the topologies a and c drive directly the motor without any control. Whereas, in topologies b, d and e, active energy management is applied by controlling the energy components with the help of DC/DC converters. Although not included in Fig.5, there are hybrid system studies consisting of SOFC and TIG/TEG in the literature [Reference Ren94]. However, these studies are only simulation studies. This hybrid system may be handled in future studies.
4.2 Components
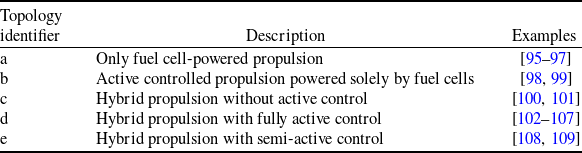
Based on their wing configuration, UAVs are divided into three primary types: fixed-wing, rotary-wing and VTOL systems. Despite differences in aerodynamic design and propulsion mechanisms, all three types contain fundamental electronic components essential for navigation, communication, energy management, and control.
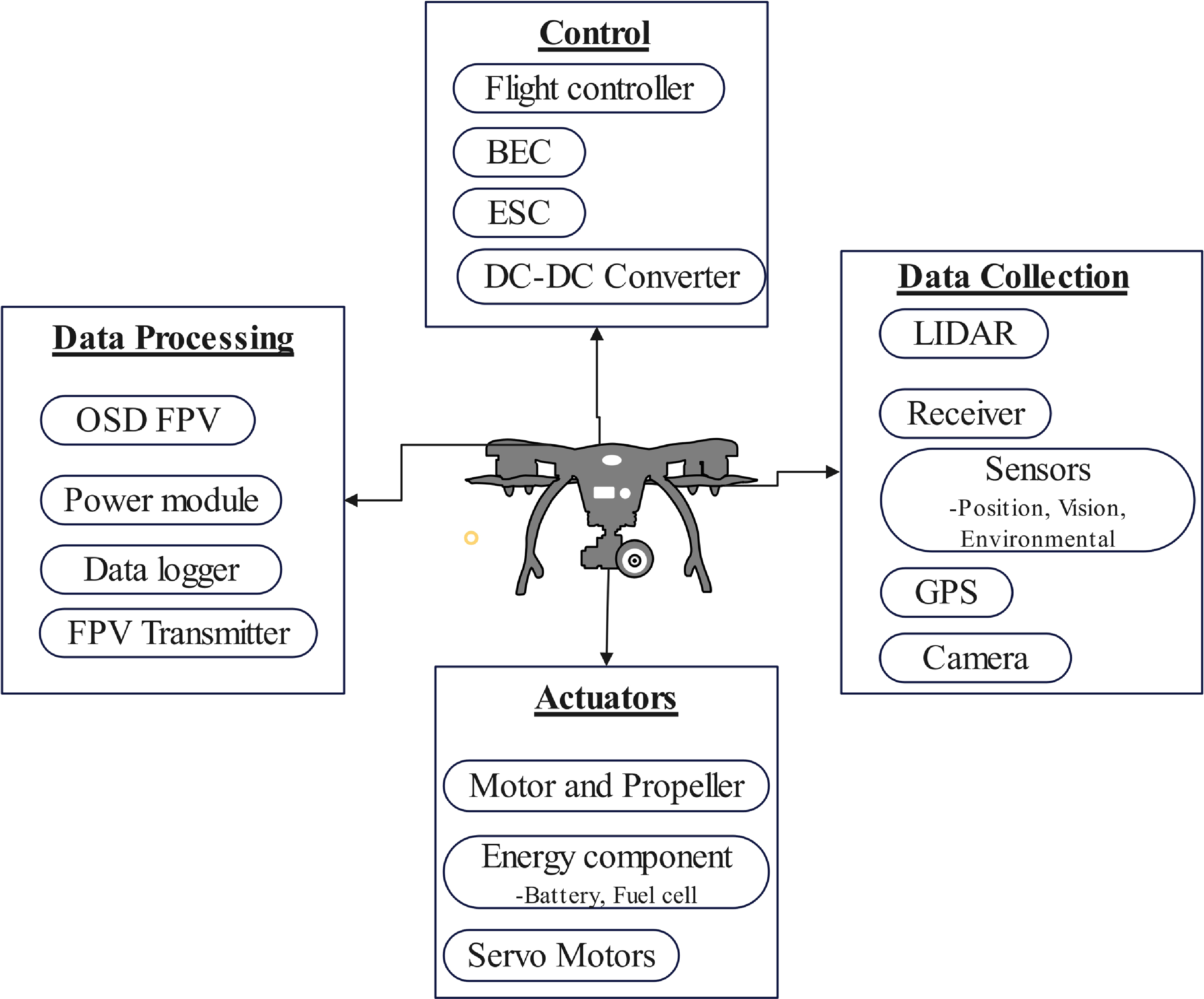
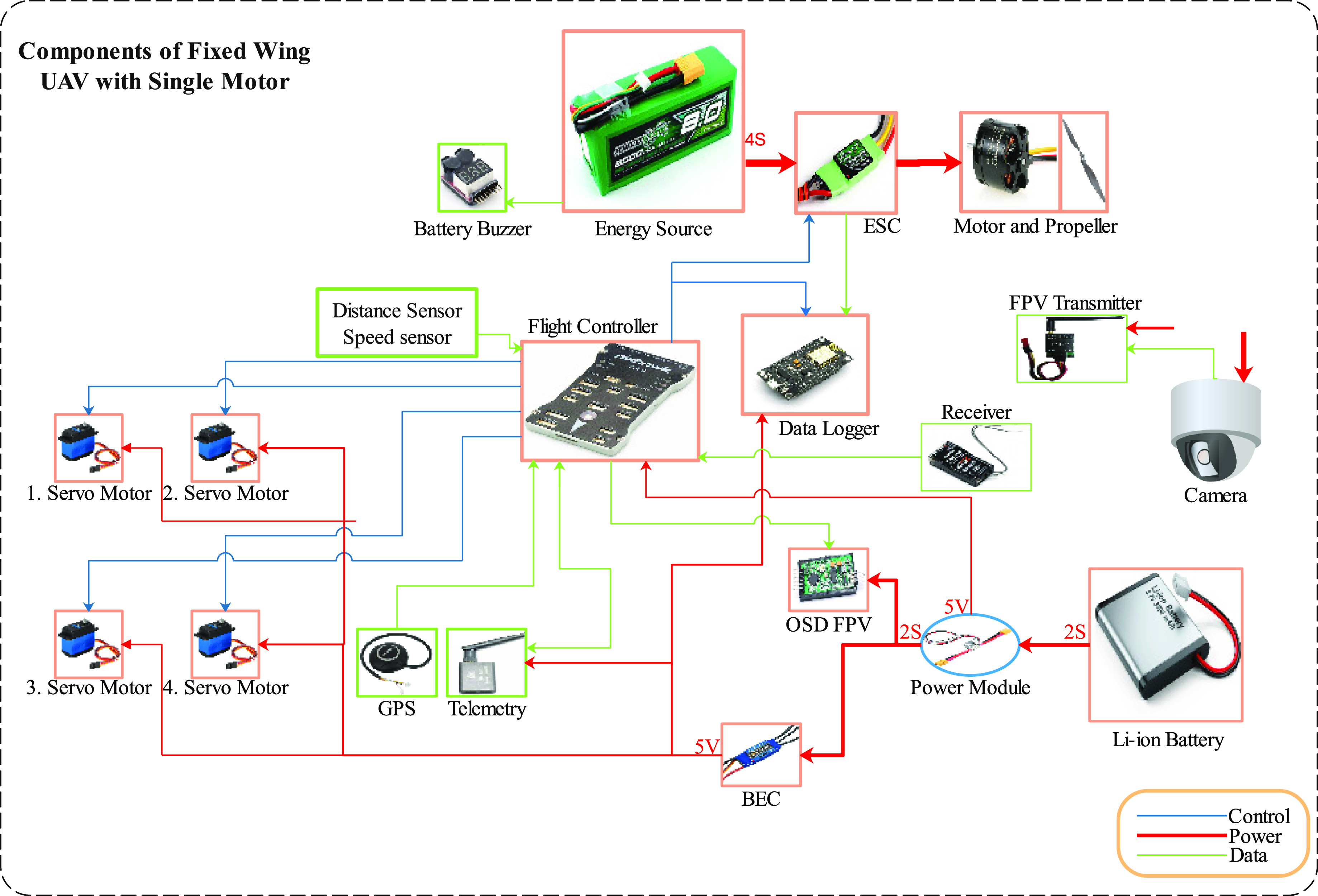
The avionics of UAVs can be broadly classified into several subsystems, including flight control systems, computing, communication, sensory, power, navigation and positioning [Reference Osmani and Schulz110]. Figure6 categorises these components, while Fig.7 illustrates a typical configuration for a fixed-wing UAV with a single motor. Fixed-wing UAVs often utilise a single electric motor for propulsion, but multi-motor configurations are also employed to enhance redundancy, energy efficiency and manoeuvrability. In contrast, VTOL UAVs rely on multiple motors for hover and cruise, necessitating more complex motor control electronics and energy distribution systems.
Electronic equipment of a small fixed-wing UAV with a single motor.
Recent developments in embedded systems facilitate real-time energy-aware path planning, especially in hybrid propulsion systems that combine diverse energy sources like fuel cells, lithium-ion batteries, solar cells and supercapacitors [Reference Hashim111]. These systems depend on high-performance flight controllers, such as the Holybro Pixhawk 6X and Cube, which combine STM32H7 microcontrollers with fast processors able to calculate power consumption and the best way to distribute energy in real-time. With DC/DC converters, power sharing between energy sources in hybrid propulsion systems can be achieved (manufacturers including Vicor, Current Logic, Texas Instruments and Linear Technologies) [Reference Martinez-Heredia, Colodro, Mora-Jiménez, Remujo, Soriano and Esteban112]. Also, the combined operation of EMS and BMS, capable of continuously measuring voltage, current and temperature enables high energy efficiency.
Real-time energy-aware path planning relies on advanced sensors that measure flight dynamics characteristics, environmental conditions and power characteristics on the relevant platform to determine trajectories while aiming to minimise energy consumption. High-accuracy inertial measurement units (IMUs) such as VectorNav VN-200 combined with RTK-GNSS modules such as Septentrio’s AsteRx-m3 and Ublox ZED-F9P provide centimeter-level positioning accuracy that allows for precise flight path corrections depending on atmospheric and terrain conditions. Moreover, advanced wind speed and air pressure sensors can detect environmental conditions that can impact excessive power consumption. Optical and LiDAR-based systems enable terrain-adaptive path planning, reducing power consumption by dynamically adjusting altitude and route selection. To process these complex real-time energy-aware path planning calculations, UAVs integrate AI-driven edge computing platforms like the NVIDIA Jetson Xavier NX and Qualcomm RB5, which execute reinforcement learning algorithms to predict the most energy-efficient flight routes. This is critical for UAVs with hybrid propulsion systems, whereby AI-aided decision-making helps dynamically allocate power between primary and auxiliary energy sources, optimising endurance while maintaining mission performance.
5.0 Energy-aware path planning for uavs
The purpose of this section is twofold, i.e. while discussing on energy-aware path planning approaches, it includes insights on the relationship of such techniques with UAV configuration (e.g. fixed-wing, VTOL, etc.).
The path planning term does not only comprise finding the shortest and optimal path but also safe flight by considering collision-free and energy awareness. The key terms motion planning, trajectory planning, and navigation are also directly related to path planning [Reference Aggarwal and Kumar51]. All of these terms are a measure of autonomy for UAVs and should be considered together in fully autonomous systems [Reference De Ruiter and Owlia113]. The Refs [Reference ul Husnain, Mokhtar, Mohamed Shah, Dahari and Iwahashi56, Reference Sepulveda and Smith114] divide the autonomy of UAVs into four levels: remotely controlled systems, automated systems, autonomous non-learning systems and autonomous learning systems. An important factor in achieving completely autonomous UAV flights is path planning algorithms. They are generally classified as traditional, mathematical models, machine-learning-based, meta-heuristics and hybrid algorithms. Figure8 illustrates a general classification of the UAV path planning algorithms.
Classification of the path planning algorithms for UAVs (adapted from Refs [Reference Aggarwal and Kumar51, Reference ul Husnain, Mokhtar, Mohamed Shah, Dahari and Iwahashi56]).
Comparison of energy-aware path planning studies for small UAV
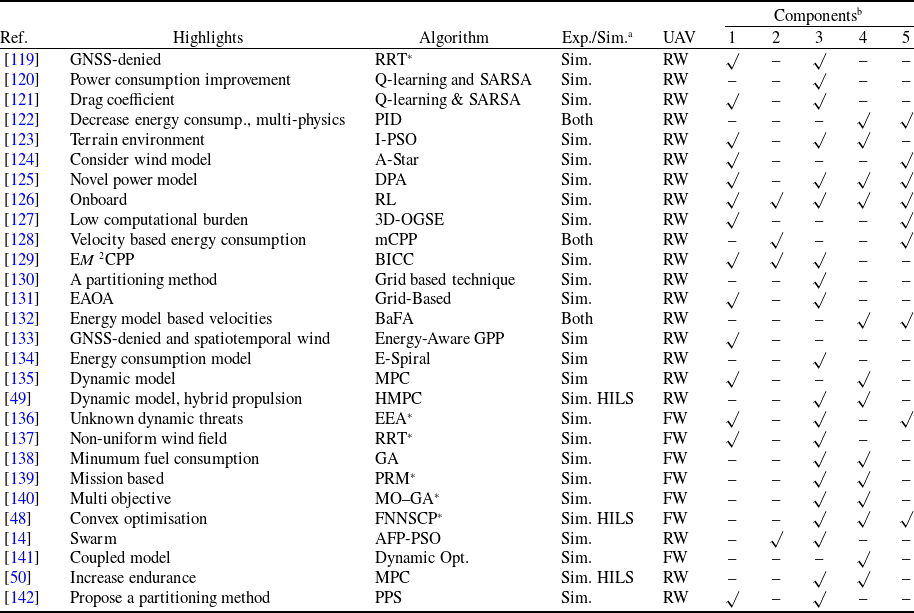
a Exp.: Experimental, Sim. : Simulation, HILS: Hardware-in-the-loop simulation
b Remark for the column of components the listed review studies incorporate/compare: 1 - Collision avoidance, 2 - multi-UAV, 3 - Comparison of studies, 4 - multi-physics, and 5 - real-time applicable and reliability.
Structure of energy-aware path planning of a small UAV with a hybrid propulsion system.
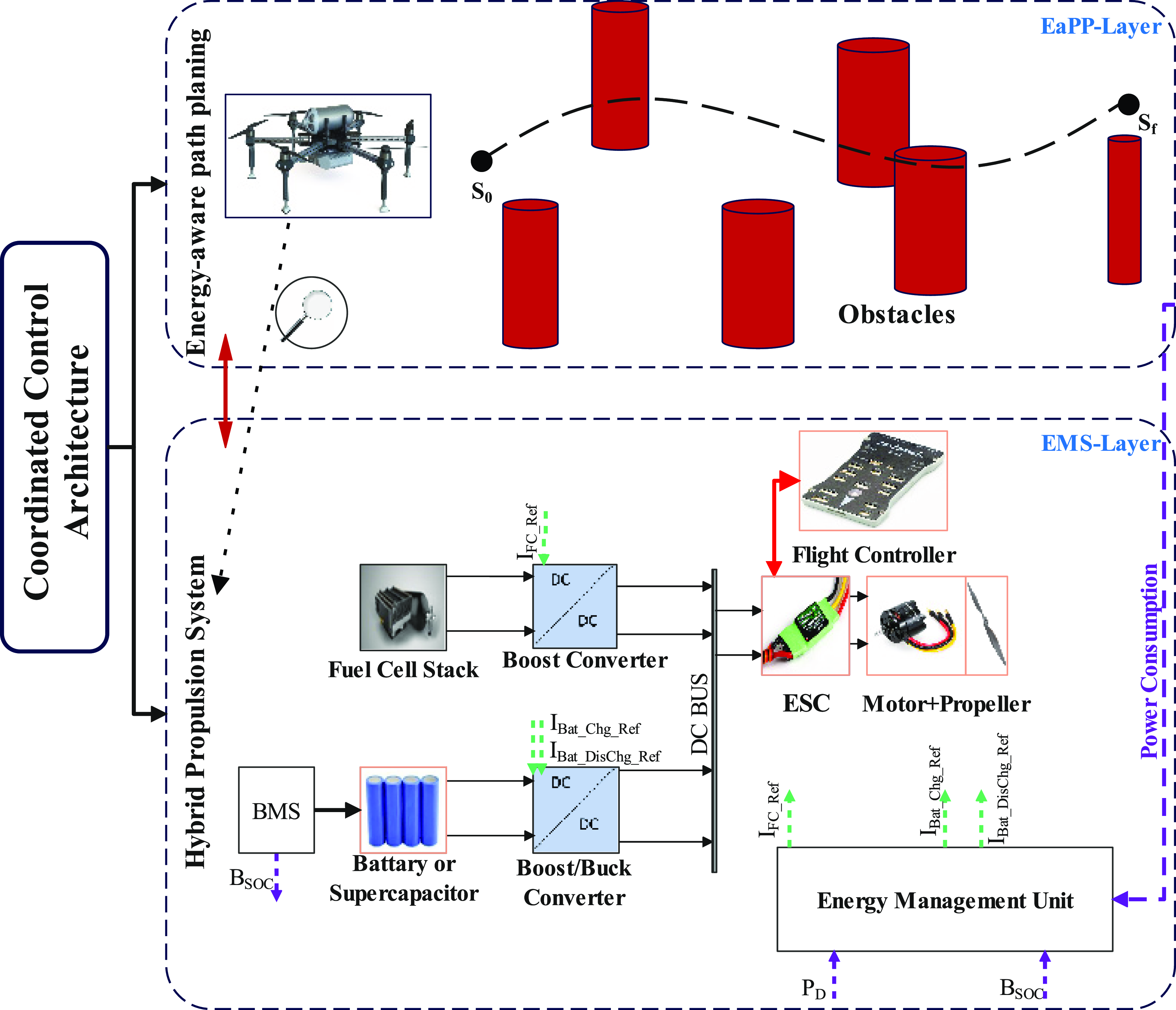
Figure8 classifies established path planning approaches from the current literature, each of the approaches having its unique characteristics. The listed approaches are compared and evaluated in Refs [Reference Mannan, Obaidat, Mahmood, Ahmad and Ahmad54, Reference Ait Saadi, Soukane, Meraihi, Benmessaoud Gabis, Mirjalili and Ramdane-Cherif57, Reference Yahia and Mohammed58, Reference Luo, Tian and Wang61]. Traditional path planning algorithms, such as A* and Dijkstra, are easy to implement and provide optimal solution in only static environments with simple obstacles yet suffering from high computational costs and poor performance when employed for dynamic and complex environments [Reference Ait Saadi, Soukane, Meraihi, Benmessaoud Gabis, Mirjalili and Ramdane-Cherif57]. Meta-heuristic algorithms generally exhibit easy implementation and scalability for complex environments but lack guaranteed optimality assurance and require parameter tuning [Reference Hooshyar and Huang115]. Machine learning-based methods provide optimal and reasonable results for dynamic environments and dynamic changes, albeit ML methods require extensive training, normally high-computational burden, and use of appropriate datasets. The more (analytical) mathematical approaches, like mixed-integer linear programming (MILP) and MPC, exhibit effective control and robustness but can be difficult to implement and normally require a model that can be complex (to encapsulate the required system information) and struggle with real-time execution [Reference Luo, Tian and Wang61]. While meta-heuristic and ML-based approaches are more effective in dynamic, complex environments and when considering uncertainties, traditional and mathematical methods are best suited for static environments. In addition, the selection of suitable algorithms depends on several factors, including the UAV’s wing configuration, mission requirements, propulsion type, adaptability to dynamic conditions, computational requirements, real-time applicability. Hybrid methods, such as the combination of MPC with RL, can balance real-time adaptability with optimal energy efficiency [Reference Choi, Jimenez and Mavris116–Reference Shiri, Park and Bennis118].
The main topics in path planning of UAVs are as follows: optimum path length, optimality, completeness, cost-efficiency, time efficiency, energy efficiency, robustness and collision avoidance. Since the path planning of a UAV depends on its mission, one or more of these main topics may be considered together in a certain mission. Given that UAVs’ flight duration and range are restricted by the energy components’ limited capacity, energy-aware path planning is a crucial research topic. Consequently, the energy-aware path planning topic has attracted great attention in the literature. Many studies deal with this topic in battery-based small UAVs.
The energy-aware path planning studies of small UAVs are compared in Table 6. Studies of energy-aware path planning for small UAVs are usually simulation-based, as shown in Table 6. To our knowledge, no experimental energy-aware path planning study has been conducted for small UAVs powered by hydrogen, despite recent years seeing the development of experimental energy-aware path planning for battery-only small UAVs. Also, energy management and energy-aware path planning should be considered together for safe and efficient flight in hybrid propulsion-powered UAVs. Figure9 illustrates a coordinated control technique that considered together the energy-aware path planning and energy management for a hybrid propulsion-powered UAV. The connection between energy management and energy-aware path planning is the power consumption of the UAV. In simulation-based studies, the power consumption of UAVs can be determined by creating a multi-physics model (model-based method). Or, an approximate power consumption can be determined by considering the UAV’s flight speed. However, actual flight tests (data-driven approach) can be used to estimate UAV power consumption. After determining the UAV power consumption, an energy-aware path planning algorithm can be implemented considering energy management. Here, the energy-aware algorithm can minimise the power consumption of the UAV and also take into account the health status parameters of its propulsion system components. In other words, energy-aware path planning covers all issues related to the power and health status of the propulsion system.
Since fixed-wing, VTOL, and rotary-wing UAVs operate under distinct flight conditions, their energy-aware path-planning algorithms have different characteristics in terms of power consumption. Fixed-wing UAVs, benefiting from higher lift forces than rotary-wing UAVs due to their fixed wings, have greater flight endurance but require a steady altitude and speed, necessitating smooth trajectories without sudden manoeuver changes [Reference Ait Saadi, Soukane, Meraihi, Benmessaoud Gabis, Mirjalili and Ramdane-Cherif57, Reference Liao, Zhu, Wu, Shaikh, Sharaf and Mostafa143]. In contrast, rotary- wing UAVs are characterised by hovering and high manoeuverability, leading to greater energy demands, while tilt-wing and tilt-rotor VTOL UAVs incorporate complex transitioning mechanisms between vertical and horizontal flight [Reference Keller, Thakur, Likhachev, Gallier and Kumar144]. Given these variations in UAV types, energy-aware path planning should account for UAV-specific power consumption behaviour influenced by factors such as flight speed, altitude, manoeuverability, acceleration and trajectory requirement. For a fixed-wing UAV, path-planning algorithms should focus on optimising altitude, utilising gliding for energy efficiency, leveraging wind assistance, minimising sharp turns and optimising waypoints [Reference Jafari, Saeedi and Pishro-Nik145]. In rotary-wing UAVs, reducing hover time, mitigating wind resistance and optimising manoeuvering are essential, whereas in VTOL UAVs, efficient mode transitioning, minimising vertical flight phases and maximising cruise efficiency should be targetted. Since fuel cells have a lower power density, they may limit the UAV’s manoeuvering capabilities and require smoother trajectories. This highlights the necessity of a joint analysis of path planning and energy management for hydrogen-powered UAVs.
6.0 Challenges and recommendations for future work
The most popular research topics in the literature on unmanned aerial vehicle path planning include complex environments, multiple UAV communication, real-time path planning and hybrid path planning algorithms. The main challenge in real-time path planning is the computational burden of the algorithms. As hardware technology develops, the number of real-time path-planning applications in UAVs will increase. In general, Veroni diagram (VD), rapidly exploring random tree (RRT), Q learning algorithm and particle swarm optimisation (PSO) algorithms are used in real-time path planning because they provide low computational burden [Reference Vashisth, Batth and Ward146]. Since many missions, such as surveillance and inspection, require multiple UAVs, the path planning topic for multiple UAVs is important [Reference Shanmugavel, Tsourdos, White and Żbikowski147]. The multiple UAVs can be homogeneous or heterogeneous. Path-planning based on time or energy minimisation and communication of UAVs are among the trending research topics in multiple UAV path planning. Also, the complex environment is one of the difficulties in the path planning of UAVs [Reference Zhao148]. Although some simulation studies use fixed obstacles and 2D environments to test path-planning algorithms, the research challenges are on dynamic obstacles and 4D (time, x, y, z) environments. Hybrid path-planning algorithms have been developed in recent years to improve the computational burden, robustness, convergence and completion properties of path algorithms [Reference Zhao, Huo, Li, Yu and Qi149]. Especially, new hybrid algorithms have been developed using meta-heuristics algorithms and machine learning algorithms [Reference Yu and Luo150, Reference Tutsoy, Asadi, Ahmadi, Nabavi-Chashmi and Iqbal151].
The trend research topics and future work recommendations briefly summarised above also are valid for the topic of energy-aware path-planning of UAVs, as they take into account the general path planning of UAVs. In addition, the specific future work recommendations for energy-aware path planning of UAVs are given below:
-
• Considering multi-physics: In simulation-based energy-aware path planning studies of UAVs, the power consumption of the UAV is carried out either by the speed of the vehicle or by simple equations. To the best of the authors’ knowledge, only few studies considered energy-aware path-planning have considered the multi-physics of the UAV by modelling the dynamics of the battery, ESC, propeller and rigid body of the UAV in the literature [Reference Michel, Wei, Kong and Lin122, Reference Michel, Kong and Lin152, Reference Michel, Wei, Kong, Sinha and Lin153]. In particular, considering the multi-physics in energy-aware path planning studies of fuel cell-powered UAVs are even more important (due to the nonlinear structure of fuel cells), and it can be said that new studies are needed in the literature on this topic.
-
• Considering energy management: Although various studies consider the energy management of hydrogen-propelled UAVs, to the authors’ best knowledge, only four studies in the current literature address energy management and path planning together [Reference Tian, Zhang and Yang48, Reference Yao, Wang, Zhou, Li, Liu and Li49, Reference Tian, Liu, Zhang, Shao and Ge154, Reference Tian, Liu, Zhang, Shao and Ge155]. In this review study the path planning of UAVs with hybrid propulsion systems supports the view of considering these simultaneously with energy management to facilitate more efficient and sustainable operations. Furthermore, the path planning of UAVs with hybrid propulsion systems has not received much attention in the literature. Therefore, energy management and energy-aware path planning of UAVs with hybrid propulsion systems should be considered together to guarantee safer and more efficient flights.
-
• Considering multi-cost function: The path planning studies mostly consider one objective. These objectives may be energy efficiency, time, shortest path length, etc. For example, energy-aware path planning studies are given in Table 6. Similarly, some studies consider the minimisation of time and path length. Depending on the mission of the UAV, it may be necessary to develop path-planning algorithms that take several of these into account. Therefore, it can be said that according to the mission of the UAV, path-planning algorithms that take into account multiple objectives should be developed.
-
• Considering altitude’s effect on the performance of the fuel cells: The changes in air temperature and pressure with altitude change directly affect the performance of the fuel cells [Reference Gong, Xing, Liang and Tu41, Reference Pratt, Brouwer and Samuelsen156]. Therefore, the altitude effect should be included in the energy-aware path planning of fuel-cell-powered UAVs. For this reason, the fuel cell performance due to altitude change should be examined, and an energy-aware path planning algorithm should be developed accordingly.
-
• Considering the aging of energy components: Although many studies discuss the estimation, modelling and monitoring of parameters such as RUL and SOH of batteries or fuel cells in UAVs, very few studies consider these health indicators together with path planning [Reference Schacht-Rodrguez, Ponsart, Garca-Beltrán, Astorga-Zaragoza, Theilliol and Zhang157–Reference Rodriguez159]. Especially in UAM vehicles that perform delivery and transportation, continuous monitoring of SOH and RUL state parameters is important for a safe and efficient flight [Reference Mitici, Hennink, Pavel and Dong160]. In this context, SOH and RUL parameters of propulsion system energy components (battery or fuel cell) should be included in energy-aware path-planning studies of UAVs.
-
• Structural complexity of hybrid systems: Although low hydrogen has a volumetric energy density, onboard hydrogen storage has challenges with aerodynamic efficiency and take-off mass [Reference Massaro, Pramotton, Marocco, Monteverde and Santarelli161]. Aerodynamic efficiency relates to the lift-drag ratio. The on-board hydrogen storage effect has negative effects on the aerodynamic efficiency of UAVs because it decreases the lift-drag ratio. Therefore, aerodynamically efficient designs of rotary-wing hydrogen-powered UAVs contain a research gap. Additionally, considering the time-varying wind and speed, aerodynamically efficient path-planning algorithms need to be developed [Reference Dobrokhodov, Jones, Walton and Kaminer162]. In fixed-wing UAVs, the hydrogen tank is placed inside the fuselage and is therefore less affected by aerodynamics than in rotary-wing UAVs. However, the air intake design for fuel cell ventilation must be taken into account [Reference Özbek, Yalin, Ekici and Karakoc108]. As a result, there is a need for designs that address aerodynamic efficiency and path planning together in both UAV types [Reference Apeland163].
7.0 Conclusion
This paper provides a timely and comprehensive review of energy-aware path planning for hydrogen-powered UAVs, a rapidly developing research field with significant potential. While battery-powered UAVs have received considerable attention in energy-aware path planning research, the unique characteristics of hydrogen fuel cell-powered UAVs necessitate a more dedicated investigation. This is where our study strongly contributes by establishing a clear baseline for future research in this domain. We comprehensively analyse the current state-of-the-art in hydrogen-powered UAV technology, including fuel cell systems, energy management strategies and relevant hybrid propulsion topology advancements. In addition, the study systematically reviews existing energy-aware path planning algorithms, comparing them across key parameters, i.e., path length, optimality, completeness, cost efficiency, time efficiency, energy efficiency, robustness and collision avoidance capability.
Unlike current review papers existing in the literature, this paper explicitly identifies key research gaps to guide future research investigations to unlock the full potential of hydrogen-powered UAVs for long-endurance and sustainable applications. These gaps, detailed in Section 4.1, highlight the need for studies that: (i) integrate energy management strategies; (ii) incorporate multi-physics and multi-cost functions; and (iii) analyse the impact of altitude on fuel cell performance. By addressing these gaps, future research can handle energy-aware path planning for UAVs.
Acknowledgments
The first author would like to acknowledge support from the Scientific and Technological Research Council of Türkiye (TÜBITAK) for funding his research visit scheme to Cranfield University for the project work (Appl. no.: 1059B192301276; REF: 53325897-115.02-476393).
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
















 Open access
Open access