


1 Introduction
Physical support can be understood as a force–dynamic relation where one object (ground object) prevents another object (figure object) from falling (Coventry et al., Reference Coventry, Carmichael and Garrod1994; Herskovits, Reference Herskovits1986; Landau, Reference Landau2020; Vandeloise, Reference Vandeloise1991). The type of force dynamic varies depending on the type of support. For example, support-from-below (cup on the table) involves a solid ground (table) preventing a figure (cup) from falling, whereas other types of support are accomplished by various mechanical means (e.g., support by adhesion – a sticker on a wall, support by hanging – a hat on a hook, support by attachment at one point – a flag on a pole; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017). Languages differ in how spatial terms map to these different subtypes of support. For example, in Dutch, “op” is used for solid support (e.g., a cookie on the plate), “aan” for tenuous support, and “om” for encirclement (e.g., necklace on a neck). In contrast, English uses “on” to describe all these subtypes (Gentner & Bowerman, Reference Gentner, Bowerman, Guo, Lieven, Budwig, Ervin-Tripp, Nakamura and Õzçalişkan2009). Even within a language, as we discuss below, there are different combinations of prepositions and verbs that map to distinct kinds of support configurations. Such breadth in the types of support observable in the world, coupled with the intricacies in how languages map to support configurations raises the question of how, even in the earliest stages of language development, children are able to map support language to non-linguistic support representations.
Recent research, largely focusing on static support configurations, suggests a division of labour that may serve as a first hypothesis for children to use as they navigate the complexity of talking about different types of support, even in the earliest stages of language acquisition. This hypothesis suggests that the Basic Locative Construction (BLC) for each language (i.e., BE on in English; other constructions in other languages; Levinson & Wilkins, Reference Levinson and Wilkins2006) maps preferentially to support-from-below, whereas other linguistic devices (i.e., lexical verbs in English) map to various types of mechanical support (Johannes et al., Reference Johannes, Wilson and Landau2016; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017; Landau, Reference Landau2020). Although children learning English continue to frequently use the BLC (“x is on y”) to encode mechanical support up until at least age four (Lakusta et al., Reference Lakusta, Brucato and Landau2020; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017), the differentiation of the semantic space by using “is on” for support-from-below, but lexical verbs for mechanical support, is seen as early as 20 months of age (Lakusta et al., Reference Lakusta, Hussein, Wodzinski and Landau2021; Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024). Yet, beyond this initial differentiation, it remains unknown how children acquire the wide range of linguistic structures that encode mechanical support. How do young children, who are in the midst of discovering and learning about varied complex physical forces (such as sticking, hanging, adhering, etc.), acquire the varied language-to-concept mappings in their language? The aim of the current study is to begin exploring this question.
To do so, whereas much of the existing literature focuses on static support configurations (e.g., mug hanging from a stand, a stamp on an envelope, or an apple on a tree; e.g., Gentner & Bowerman, Reference Gentner, Bowerman, Guo, Lieven, Budwig, Ervin-Tripp, Nakamura and Õzçalişkan2009; Johannes et al., Reference Johannes, Wilson and Landau2016; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017), we focus on dynamic events. Events and states have different semantic structures (Jackendoff, Reference Jackendoff1990; see below), raising the possibility that children may encode support in them differently – specifically using lexical verbs more to encode support events versus states. Further, in the current study, we aim to delineate the semantic space of mechanical support to a greater extent than has been done in previous research (e.g., Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017). Linguistic analysis of English verbs (Levin, Reference Levin1993) proposes detailed semantic/syntactic distinctions between verb classes that are relevant for encoding mechanical support (also discussed below). We look carefully at these subclasses and ask whether the types of verbs that children use to encode mechanical support changes over development; for example, do children use lexical verbs that encode a specific mechanism (e.g., “glue,” “tape”) later in development than verbs that do not encode a specific mechanism (e.g., “hang,” “stick”)? Understanding the developmental progression of mechanical support verbs will not only delineate the semantic space of these verbs for children, but also it will help formulate hypotheses about how non-linguistic representations of mechanical support (e.g., the causal forces that are responsible for support) may play a role in language development for this domain.
1.1 The language of mechanical support for events versus states
The distinction between events and states is widespread in linguistics and language development research. Events and states are two different conceptual/semantic (or ontological) categories and were selected for different semantic arguments. For example, consider the simple distinction between events and states in the domain of motion events, where an event (GO) selects for a path and a state (BE) selects for a place (discussed by Jackendoff, Reference Jackendoff1990, p. 26; see also Gruber, Reference Gruber1976):
Event: The girl goes to the store.
[Event GO ([ ], [Path TO ([ ])])]
vs.
State: The girl is at the store.
[State BE ([ ], [Place])]
When considering the domain of Physical Support, we see a similar distinction between events and states. Consider an event encoded by the verb “put”; “put” selects for a path (similar to GO), but it also selects for a causal agent (Jackendoff, Reference Jackendoff1990, p. 80):
Event: She put the picture on the tree.
[Event CAUSE ([Thing ], [Event GO ([Thing ], [PATH (TO ([Place ]))])])].
In contrast, the semantic argument for encoding the state of the picture (similar to BE in the domain of motion above) selects for a place and does not select for a causal agent.
State: The picture is on the tree.
[State BE ([ ], [Place ])]
It is important to note that, in English, there are many different lexical verbs that can encode mechanical support (e.g., “stick,” “attach,” “glue,” “tape,” “hang,” etc.; see Table 1 and Levin, Reference Levin1993) and such lexical verbs can encode the support as a state or as an event. Consider a scene of a girl attaching a picture to a door with tape (see Figure 1). One can encode this as “The girl sticks/hangs the picture on the door” or “The picture sticks/hangs on the wall.” In the first description (event encoding), the verb selects a causal agent in semantic structure and the event represents a causal relation between the agent and the figure object. In the second description (state encoding only), the causal agent is not encoded in semantic structure and the cause is not encoded.
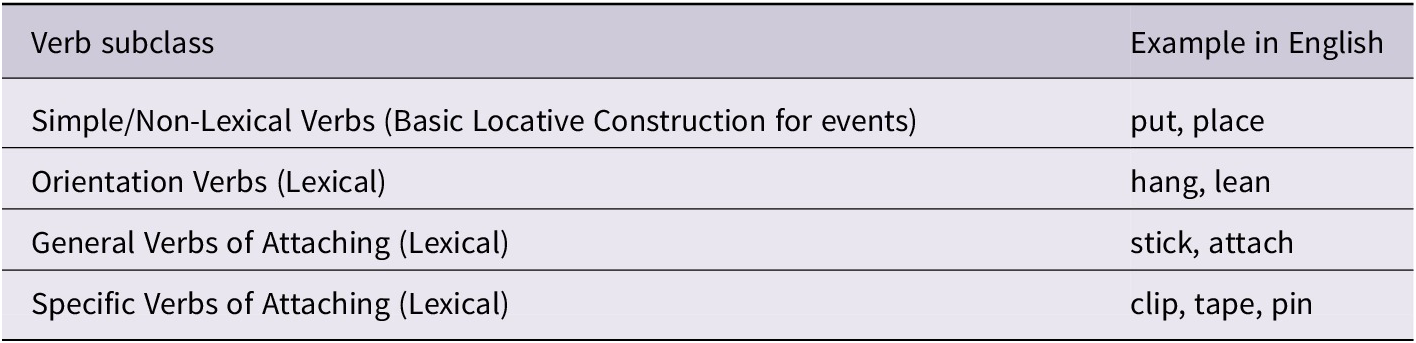
English verb classes relevant for encoding mechanical support (based on Levin, Reference Levin1993)

Stimuli used for Experiments 1 (dynamic) and 2 (static) separated by visible and hidden attachment mechanisms (i.e., fasteners): (a) and (g) visible clip, (b) and (h) visible tape, (c) and (i) visible pin, (d) and (j) hidden clip, (e) and (k) hidden tape, (f) and (l) hidden pin.

As alluded to above, past research has shown that when describing mechanical support in static configurations, children younger than age six tend to prefer to BE on over lexical support verbs (e.g., glue, tape, etc.). In one study (Johannes et al., Reference Johannes, Wilson and Landau2016), children and adults were presented with pictures of static support configurations (e.g., a toy stuck on a box, a mug hanging on a stand, a sticker stuck to a book); adults were asked to type in an answer to the question, “Where is the (object pointed to by the arrow)?” Children (after labelling the figure and ground objects in the scene), were asked the question, “Where is the [figure object]?” The results revealed that four-year-olds used BE on 70% of the time (e.g., “The picture is on the wall.”) and only used lexical verbs about 4% of the time (see Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024 for a conceptual replication with different stimuli). In contrast, although six-year-olds and adults used BE on as well (e.g., 66% and 35% for six-year-olds and adults, respectively), they did use lexical verbs significantly more than younger children (23% and 56% for six-year-olds and adults respectively, compared with 4% for four-year-olds; Johannes et al., Reference Johannes, Wilson and Landau2016). Johannes et al. suggest that lexical competition between BE on and lexical verbs (e.g., “tape,” “stick,” etc.) may explain this bias for BE on in four-year-old children. Support for this hypothesis comes from a recent study by Lakusta et al. (Reference Lakusta, Wefferling, Elgamal and Landau2024) reporting that when children are presented with a forced choice task in which a lexical verb (e.g., “tape”) and BE on are both offered as possible descriptions, four-year-olds will choose the lexical verb over BE on. Thus, young children have the knowledge of lexical verbs to encode mechanical support, although they are not felicitously using them, at least when asked to describe static configurations.
Johannes et al. (Reference Johannes, Wilson and Landau2016) suggest why children may not use lexical verbs for mechanical support configurations (lexical competition), but this does not explain when children will use lexical verbs. In the current study, we explore this by testing children’s (and adults’) use of lexical verbs when the support is presented in a dynamic event. We hypothesise that since dynamic support events are causal and select for an agent, children may be more likely to encode details of the support that are related to the causal agent, such as the mechanism the agent uses for one object to be supported by another (and thus use lexical verbs such as “stick,” “tape,” etc.). If so, this would not only support the idea that young children have lexical mechanical support verbs as part of their lexicons, but also shed light on how children may conceptually represent mechanical support (in terms of an agent, mechanism, etc.).
1.2 The language relevant for encoding mechanical support
In addition to exploring whether children use lexical verbs to encode mechanical support in dynamic events, the current study also examines the types of lexical verbs used by children and adults (thus, aiming to delineate the semantic space of mechanical support). A prominent linguistic analysis by Levin (Reference Levin1993) suggests two distinct verb classes – Verbs of Putting and Verbs of Attaching (and corresponding subclasses) that seem to be the most relevant verb classes for encoding mechanical support in English (see Table 1). This analysis makes explicit how different types of verbs (i.e., verbs that encode different aspects of meaning and differ in their permissible syntactic structures) can be used to encode the same spatial configuration (e.g., the girl put/hung/stuck/taped the picture on the wall). Put verbs (“put,” “place”) – non-lexical, simple verbs – are semantically identical to the BLC (BE on) except they encode a dynamic event rather than a static state. Verbs of Putting in a Spatial Configuration (henceforth, “Orientation Verbs”; “hang,” “lean”) encode the spatial orientation of the figure object relative to the ground object but do not specify the causal mechanism responsible for the spatial configuration (e.g., “hang” in “she hangs the picture from the door” specifies only that the picture is oriented in a downward position from the door but does not specify the mechanisms enabling the support). In contrast, the Verbs of Attaching include two subclasses that each encode the mechanism (Levin, Reference Levin1993). General Verbs of Attaching (e.g., “stick”) encode something about the mechanism (e.g., it is sticky) without encoding any specific fastener, whereas Specific Verbs of Attaching (e.g., “tape”) encode a specific fastener; in English, they are often denominals. Verbs of Attaching do not encode the spatial configuration of the figure object (e.g., “stuck” in “She stuck the bow on the box” specifies that the bow is attached to the box but does not specify the orientation of the bow with respect to the box: top vs. side); any inference regarding the spatial configuration is often based on prior knowledge (e.g., bows are typically on top of boxes) or from an additional prepositional phrase (“…on the top of the box”). This semantic analysis of these four verb classes is summarised in Table 1. Such intricacy in how these verb types encode different aspects of support configurations provides a further opportunity to explore how children conceptually represent mechanical support events, such as the perspective they take when encoding a mechanical support event and whether and how they map certain components to verbs over others (e.g., put vs. hang vs. stick vs. tape).
Another important observation about mechanical support events is that similar to other causal events (e.g., a change of state event in which a light turns on by sensing motion), the mechanism of support is not always visible. For example, consider the depicted event in Figure 1 – a girl putting a picture on the door. Sometimes the mechanism is visible (e.g., the tape in Figure 1) but sometimes it is not (Figure 1), such as tape on the back of paper (or invisible tape), glue that dries clear, hooks behind pictures, etc. Given that even children can reason about hidden causes in other domains (Schulz & Sommerville, Reference Schulz and Sommerville2006), we explore whether and how this variable may affect children’s linguistic encoding in the Mechanical Support domain. Thus, in the current study, for half of the stimuli, the mechanism is visible (e.g., an exposed piece of tape used to hang a picture on a wall), while for the other half of the stimuli, the mechanism is hidden (e.g., the same piece of tape, hidden on the back of the picture hung on the wall). We predict that children’s choice of lexical verbs (i.e., which subclass they fall into in Table 1) may vary depending on whether the mechanism is visible or not, with children using fewer Specific Verbs of Attaching (e.g., “tape”) when the mechanism is hidden.
1.3 The current study
To test our hypotheses, we designed an elicited production task adapted from previous research (Johannes et al., Reference Johannes, Wilson and Landau2016; Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024), that was conducted with four- and six-year-old children, as well as adults. As we explain in the Method, all the stimuli were designed such that they could either be described with any of the verb types included in Table 1 (e.g., “is,” “put,” “hang,” “stick,” “glue”), and all stimuli had visible and hidden support mechanisms.Footnote 1 In Experiment 1, the support relations were depicted in dynamic events (a girl put a picture on a tree). If children are likely to use lexical verbs when describing mechanical support dynamic events, then children (especially four-year-olds) should use lexical verbs more than has been reported in previous research (which reports extremely low percentages: 4% in Johannes et al., Reference Johannes, Wilson and Landau2016; and 5% [for adhesion] and 12% [for hanging] in Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024). Further, the distribution of mechanical support lexical verbs may differ for the visible mechanism versus hidden mechanism events. As we report below, both predictions were supported. Then, in Experiment 2, we further tested the conditions that elicit lexical mechanical support verbs by depicting the support relations in Experiment 1 as static configurations (picture on the tree), but otherwise keeping the method the same between Experiment 1 and 2.
2 Experiment 1: dynamic events
2.1 Method
Participants. Twenty-seven four-year-olds (M age = 52 mos.; Range: 48–59 mos.; 8 males) and 27 six-year-old children (M age = 75 mos.; Range: 72–83 mos.; 20 males) were included in the final sample. Twenty-seven adults (parents of the children) also participated. The majority of the four-year-old children were both non-Hispanic/Latino (n = 25, 92.6%) and White (n = 22, 81.5%). In addition, the primary caregiver’s education level was assessed as a marker of socio-economic status, and 96.3% (n = 26) indicated having a college degree or higher. The majority of six-year-old children were also both non-Hispanic/Latino (n = 24, 88.9%) and White (n = 23, 85.2%). Most primary caregivers of the six-year-old children reported having a college degree or higher (n = 25, 92.6%). All children’s native language was reported to be English. Four additional children were tested but their data were excluded because they did not understand the task/did not complete the experiment (n = 3) and a parent provided one child with the answers. Participants were recruited from community fairs or various social media groups. We conducted power analyses using G*Power (Faul et al., Reference Faul, Erdfelder, Buchner and Lang2009) to determine the final sample size. This sample size was sufficient to detect a significant difference between the visible and hidden mechanisms within each age group in a paired samples t-test, with parameters set at p = .05, power > .95, and assuming a large effect size (d = .8) based on prior research using similar methods (Johannes et al., Reference Johannes, Wilson and Landau2016; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017). Although we conducted power analyses for t-tests analyses, we conducted logistic mixed effects models in our final analyses to better account for participants. Participants were compensated with a $10 gift card. All study procedures were approved by the Montclair State University Institutional Review Board (IRB).
Materials and design. A novel battery of 12 dynamic events depicting mechanical support via attachment was created. Four events displayed taping via tape, four displayed clipping via a clip, and four displayed pinning via a pin (see Figure 1). In six events the tape/clip/pin was placed on the top of the figure and was in full view, and in the other six events the tape/clip/pin was located on the back of the figure and completely hidden from view (see Figure 1). All the events were about 7.5–8 seconds long and first showed the ground object (door or tree; 1.2 s) followed by a hand appearing on the screen and attaching (taping, clipping, or pinning) a figure object (piece of paper – “a toy”) to a ground object (door or tree; 3–4 s). The hand then retracted (0.30 s) showing only the figure and ground object (2.00 s). The videos were imported into PowerPoint (videos were 4.92” × 7.5”). In addition to the 12 dynamic events displaying mechanical attachment, an additional four videos were included as filler items to deter participants from falling into a pattern of responding when describing the support configuration. Two of the videos displayed a figure object in the ground object and the other two displayed the figure under the ground object. Furthermore, a dynamic video depicting a motion event (man rolling from a bin to a pillow) was included as a practice trial. Both practice and test trials were presented sequentially using PowerPoint. Test trials were randomised to create two orders, with the constraint that no more than two videos with the same ground object (tree/door) appeared consecutively.
Procedure. Children and their parents were tested online via Zoom with a video recording of the experiment. Before the testing session, parents completed the informed consent. The experiment proper began with a practice trial which was included to introduce participants to the procedure. During practice, participants viewed a manner of motion event (person rolling) and were asked to describe “what happened.” Regardless of the participant’s response, participants next viewed a video introducing the paper toys that they would see in the upcoming experimental stimuli; the experimenter explained, “Look at all the toys I have at my house! One day my sister was playing with my toys. Can you tell me what she did with them? Your job is to tell me what she did with my toys!”
The procedure remained the same for each of the 12 test trials; the participant viewed a video of a toy being attached to a tree or a door. Then, the experimenter asked, “Can you tell me what my sister did with my toy?” After the participant responded, the experimenter said, “Great job! Let’s do some more!” If the participant did not respond during the test trial, the experimenter said, “I am going to play the video again. I need you to tell me what my sister did with my toy.” The experimenter replayed the video and prompted the participant again, “Can you tell me what my sister did with my toy?” Participants were encouraged throughout the test trials. The experimenter proceeded to the next test trial after the participant provided a description but documented if the participant used a Simple Verb (e.g., “put,” “place”). Then, at the end of the 12 test trials, the experimenter returned to the trials that participants provided responses including Simple Verbs, re-played the video, and asked the participant, “Last time I showed you this video, you told me my sister ‘put’ the toy …. Can you tell me what my sister did again without using the word ‘put’?” The experimenter repeated this prompt up to two times, to encourage the participant to use specific lexical verbs. If the participant continued to use a Simple Verb after being prompted twice, the experimenter proceeded to the next test trial that required review. The “review phase” of the experiment was included to provide the participant with an opportunity to use a specific lexical verb (i.e., to provide a strong test of their competence). As explained below in Results, for all primary analyses, we analysed both participants’ initial responses during the test trials as well as their descriptions during the later review phase.
After the 12 test trials, participants were presented with a post-test in which they sequentially viewed a picture of each mechanism (red binder clip, black piece of tape, green pushpin) used in 12 test trials and were asked to name each object. Our objective for including this post-test was to explore whether children’s use of specific lexical verbs (“clip,” “tape,” and “pin”) is related to their knowledge of these noun labels. After the child portion of the experiment was complete, the child’s parent/guardian was tested using the exact same method as described above. For the child portion, parents were told to look away from the screen and wear headphones or step away from the computer. If the parent remained or was not comfortable wearing headphones, the parent was not included in the parent portion.
Coding. Children’s language descriptions for the 12 test trials were transcribed from the video recordings and coded by a trained research assistant. The transcriptions were coded in terms of the full Verb Phrase (VP; Verb + Preposition). Guided by linguistic analyses (Levin, Reference Levin1993; Levinson & Wilkins, Reference Levinson and Wilkins2006) and informed by the pilot study (see Footnote 1), the VPs were coded as the following verb types (see Table 1): (1) Simple Verbs, that is, “put” and “place,” (2) Orientation Verbs, such as “hang” and “dangle,” (3) General Verbs of Attaching, such as “stick” and “attach” (i.e. verbs that do not encode a specific fastener), (4) Specific Verbs of Attaching, such as “tape,” “clip,” “pin” (i.e., those that encode specific fasteners), (5) Other, which included VPs that did not fall into one of the first four categories, and (6) No VP, which included descriptions in which a VP was omitted. A second trained research assistant coded 50% of the complete set of transcriptions in terms of the full VP as well as which category (1−6 above) and overall category (simple or lexical verb). The inter-rater reliability was 99%.
2.2 Results
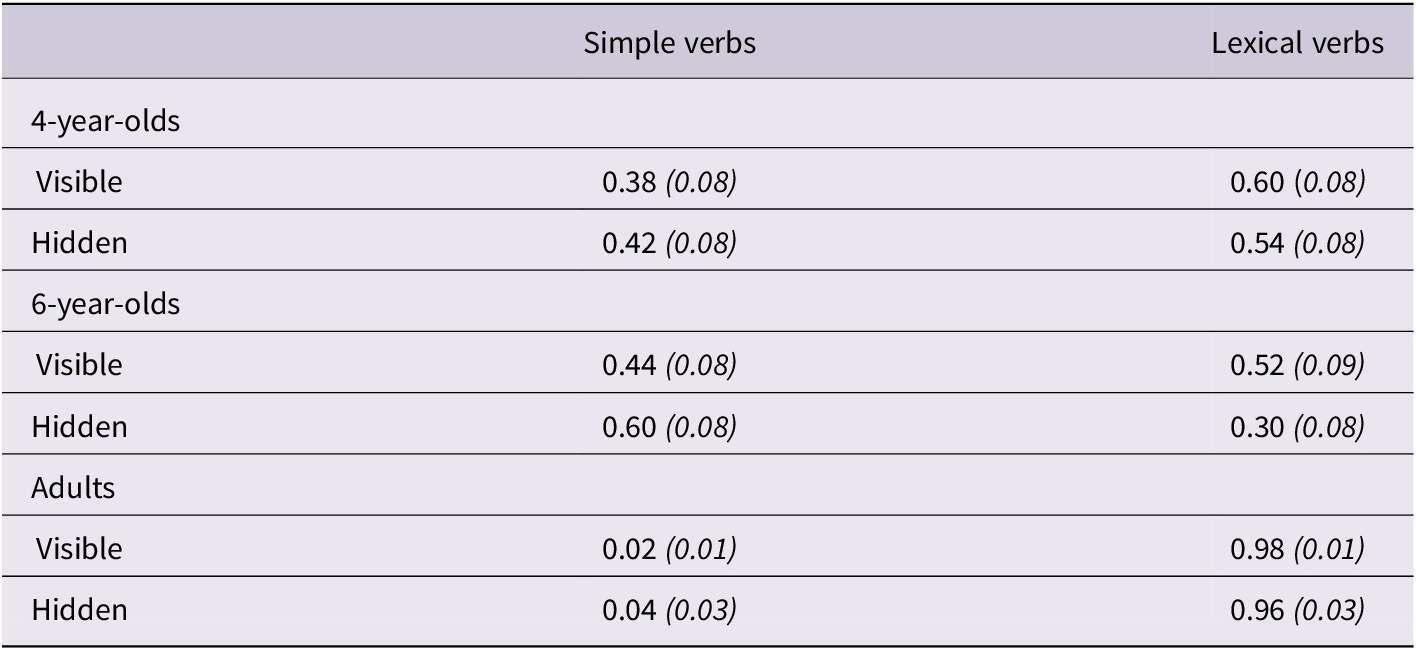
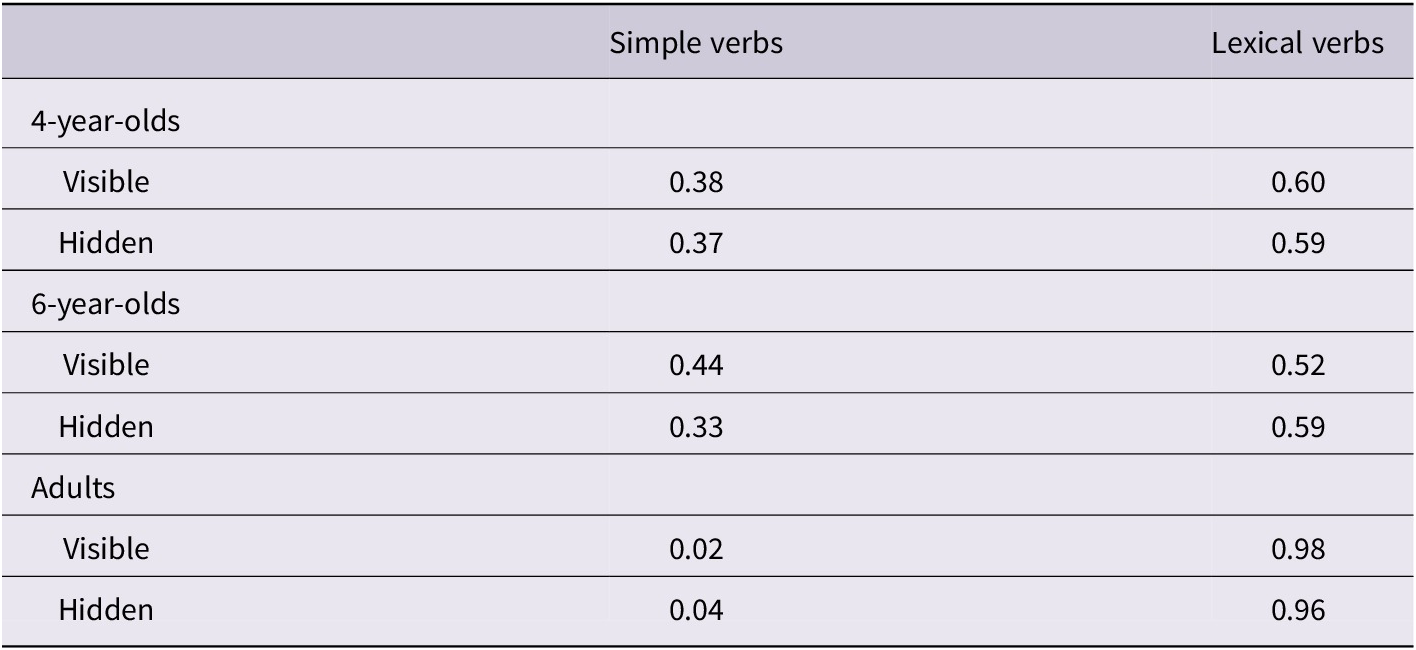
Lexical verb use for dynamic events. We report the descriptive statistics for all VPs in Table 2; see Table 1 for verb categoriesFootnote 2. The primary analyses were conducted using participants’ first responses (i.e., responses elicited during the experiment proper – not during the “review phase”). Examples of participants’ first responses included “put it on a branch,” “she hanged it up on the door,” “she taped it to a tree,” “she stick it onto the cabinet.” We also coded participants’ responses during the review phase for any lexical verb usage and conducted additional analyses in which responses were coded as including a lexical verb whether the participant used it during the test phase or review phase (e.g., participant first responded “she put it on a branch” and then, during the review phase responded, “she taped it onto the branch”). Any findings that differed from the primary analyses (i.e., those based on first responses) are reported in Appendix A along with the mean proportions of verb phrases from the “review phase” in Appendix B.
Mean proportions (with standard errors) of simple versus lexical verbs for 4-year-olds, 6-year-olds, and adults by visible and hidden stimuli

As shown in Table 2, all groups used lexical verbs (i.e., Orientation, General, and Specific Verbs of Attaching) over 50% when describing the visible mechanism events and above 30% when describing hidden mechanism events. The proportion for the four-year-olds is considerably higher than previous research (Johannes et al., Reference Johannes, Wilson and Landau2016; Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017) which reports lexical verb use of less than 12% for four-year-olds when describing static configurations.
Statistical analyses were conducted using jamovi version 2.4.11.0 (The jamovi project, 2024). We conducted a mixed-effects logistic regression to test participants’ likelihood of including a lexical verb (0 = Not a lexical verb, 1 = Lexical verb) in their description compared with all other VP categories (Simple Verbs, Other Verbs, and No VP). Mechanism visibility (visible vs. hidden) and Age group (four-years vs. six-years vs. adults) were entered as fixed effects; random intercepts for Participants, a by-Participant random slope for Mechanism Visibility, and the correlation between the two.Footnote 3 We used simple effect coding for Mechanism Visibility and repeated effect coding for Age group (four-year-olds vs. six-year-olds, six-year-olds vs. adults). Mechanism visibility and Age significantly influenced the likelihood of participants using lexical verbs in their responses (see Table 2 and Appendix A). Participants were less likely to use lexical verbs for events in which the mechanism was hidden compared with events in which the mechanism was visible (β = −1.52, 95% confidence interval [CI] = −2.32 to −0.721, p < .001). There were no significant differences in lexical verb use between four- and six-year-olds (β = −1.67, 95% CI = 4.13 to −0.79, p = .18. However, compared with six-year-olds, adults were more likely to use lexical verbs in their responses (β = 8.05, 95% CI = 5.42 to 10.67, p < .001).
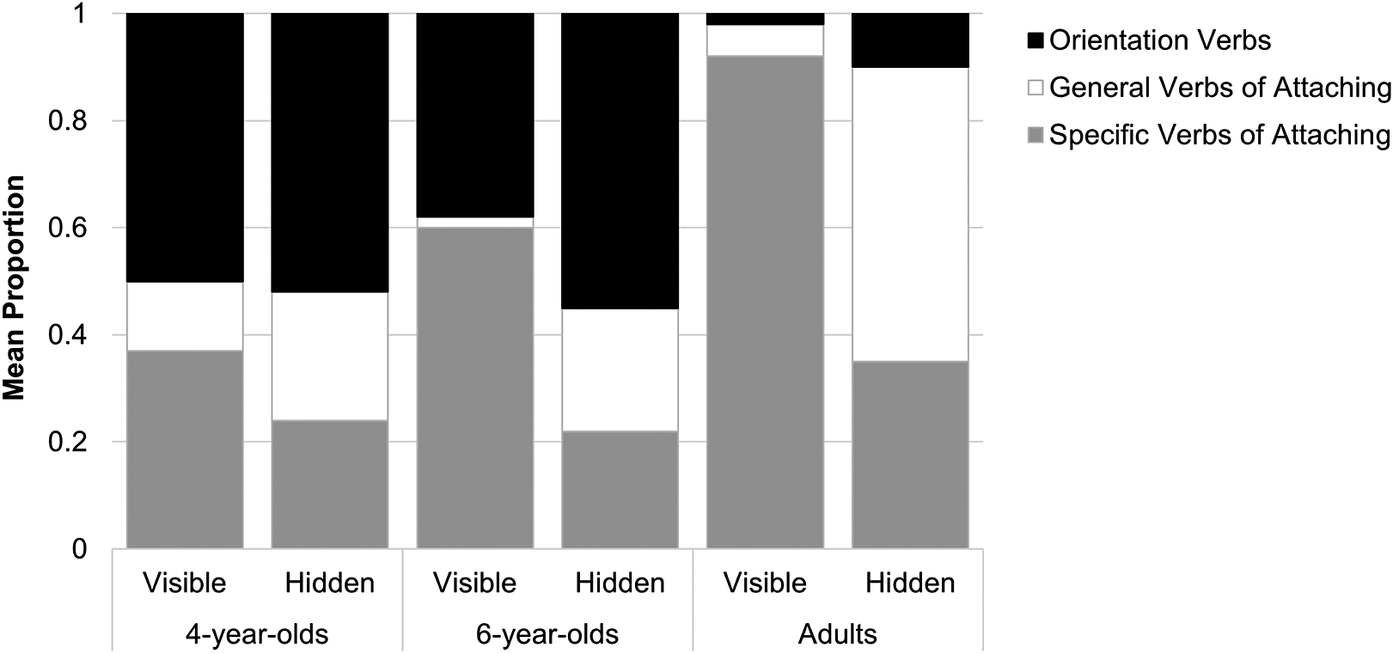
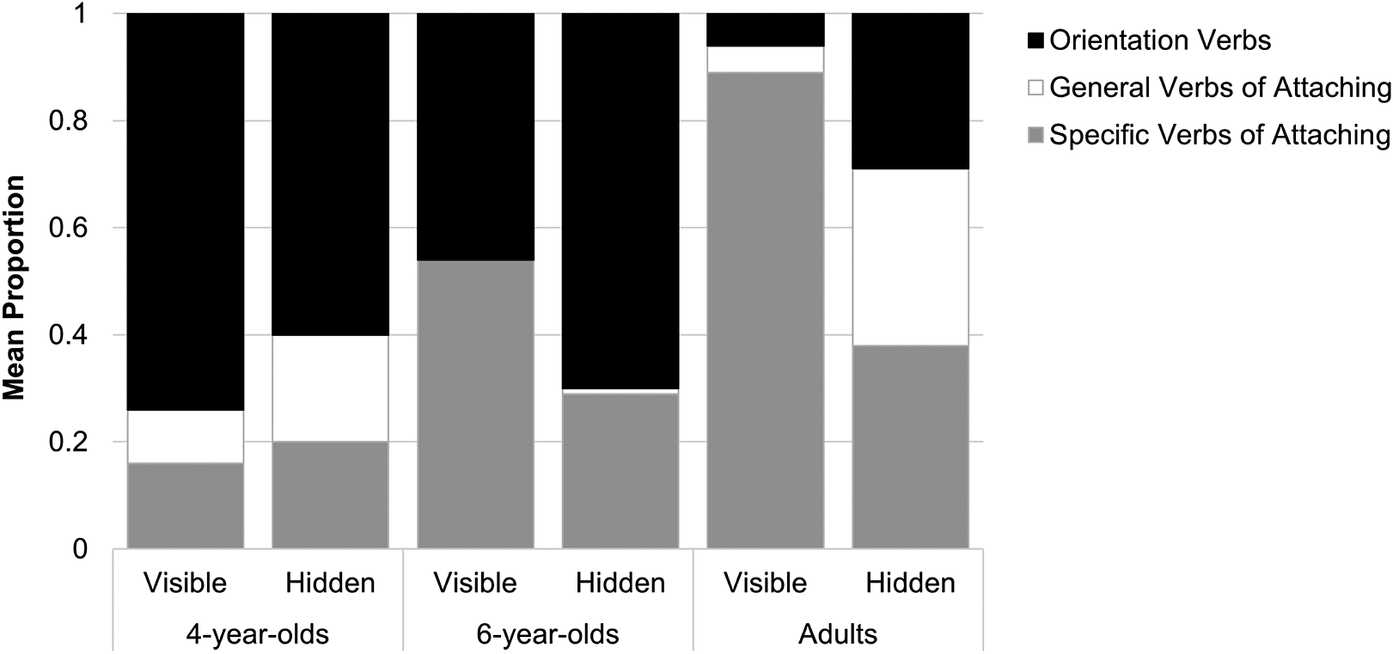
Distribution of lexical verbs for dynamic events. To explore how participants encoded the mechanical support in the events, we next examined the types of lexical verbs (Orientation Verbs, General Verbs of Attaching, and Specific Verbs of Attaching; see Table 1) used by participants and whether mechanism visibility impacted the type of verb used (Figure 2).
Lexical verb subclass use for four- and six-year-old children and adults are shown for visible and hidden events.

We conducted a mixed-effects multinomial regression analysis to test participants’ likelihood of using a particular type of lexical verb (1 = Orientation Verbs, 2 = General Verbs of Attaching, or 3 = Specific Verbs of Attaching). Simple Verbs, Other Verbs, and No VP were not included in the analyses. Mechanism visibility (visible vs. hidden) and Age group (four-years vs. six-years vs. adults) were entered as fixed effects; the model included random intercepts for Participants, a by-Participant random slope for Mechanism Visibility, and the correlation between the two. We used simple effect coding for Mechanism Visibility and repeated effect coding for Age group (four-year-olds vs. six-year-olds, six-year-olds vs. adults). Orientation Verbs were selected as the reference category. There was a significant effect of Mechanism visibility and Age. First, across Age, Mechanism visibility impacted the type of lexical verb that participants used. Relative to the influence of visibility on Orientation Verbs, participants were more likely to use General Verbs of Attaching (β = 1.66, 95% CI = 0.76 to 2.56, p < .001) and less likely to use Specific Verbs of Attaching (β = −1.79, 95% CI = −2.53 to −1.04, p < .001) when events were hidden versus visible. Compared with four-year-olds, the change in the use of General Verbs of Attaching relative to Orientation Verbs did not differ significantly for six-year-olds (β = −0.396, 95% CI = −2.13 to 1.34, p = .655). Similarly, the change in the use of Specific Verbs of Attaching relative to Orientation Verbs did not differ significantly between four- and six-year-olds (β = 0.79, 95% CI = −0.51 to 2.10, p = .235). In contrast, relative to how Orientation verbs changed from six-year-olds to adults, General Verbs of Attaching and Specific Verbs of Attaching increased (β = 2.995, 95% CI = 1.64 to 4.35, p < .001; β = 3.612, 95% CI = 1.93 to 5.29, p < .001, respectively).
Additional analyses. As described in the Method, after describing the events, children’s knowledge of the mechanism (tape, clip, and pin) was tested. Since, in English, many of the lexical verbs are denominals for mechanical support (see Levin, Reference Levin1993), we reasoned that children’s use of lexical verbs may be related to their knowledge of the names for the objects. With the exception of “pin” for the four-year-olds, children correctly named the mechanisms over 50% of the time (Mean proportions for four- and six-year-olds, respectively: “clip”: 0.56 and 0.78, “tape”: 0.63 and 0.89, and “pin”: 0.07 and 0.56). Adults correctly named all mechanisms 100% of the time. To test whether correct noun labelling (1 = correct, 0 = incorrect) was related to children’s use of the corresponding lexical verbs (1 = used corresponding verb, 0 = did not use), six Phi coefficients were calculated (one for each age group and noun/verb combination). The only noun/verb relation that was significant was for “clip,” (φ = .474, p = .014 and φ = .478, p = .013, for four- and six-year-olds, respectively).
2.3 Interim summary
When describing dynamic support events all groups (including the four-year-olds) used lexical verbs the majority of the time, although adults used them more frequently than both groups of children. This contrasts sharply with previous findings reporting that four-year-olds used lexical verbs less than 12% of the time when describing static configurations (Johannes et al., Reference Johannes, Wilson and Landau2016; Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017), suggesting that the dynamic nature of the event influences verb choice for event encoding; we explore this further in Experiment 2. In addition, lexical verbs of attachment were used more to describe events with visible mechanisms versus hidden mechanisms, and when examining the types of lexical verbs used across the three age groups, Specific Verbs of Attaching (e.g., “tape,” “glue”) were used more for visible mechanism versus hidden mechanism events. Finally, children used more Orientation Verbs (e.g., “hang”) compared with adults; adults used more Specific and General Verbs of Attaching (e.g., “tape,” “stick”). These differences in the types of lexical verbs used not only delineate the semantic space of mechanical support across event types and ages but also shed light on potential cognitive and/or linguistic biases that may be influencing how mechanical support is encoded in children (which seems to differ from adults). This is discussed further in the General Discussion.
In Experiment 2, we explore further what factors may have contributed to the relative increase in lexical verb use (above 50%) compared with prior studies that used static configurations, especially for four-year-olds. Note that in Experiment 1, not only were the support events dynamic (an agent putting an object on another object), but our method prompted participants to describe the location of the “toy.” The experimenter asked the child “Can you tell me what my sister did with the toy?” Such a question may bias participants to adopt an event perspective and describe the stimuli – this time a static support configuration – with event language (e.g., “She put the picture on the tree”; see Introduction). In Experiment 2, we keep these instructions the same, but present the static end state of support (rather than a dynamic event), and test how this affects verb use.
3 Experiment 2
3.1 Method
Participants. Seventeen four-year-old (M age = 55 mos.; Range: 49–59 mos.; 10 males) and 16 six-year-old children (M age = 77 mos.; Range: 72–82 mos.; 5 males) were included in the final sample. Twenty-two adults (parents of the children) also participated. The majority of the four-year-old children were both non-Hispanic/Latino (n = 15, 88.2%) and White (n = 13, 76.5%). The majority of six-year-old children were also both non-Hispanic/Latino (n = 13, 81.3%) and White (n = 11, 68.8%). All primary caregivers of the four- and six-year-old children reported having a college degree or higher. All children’s native language was reported to be English with the exception of two siblings who were also reported to have a native language of Malayalam. The majority of the sample was recruited using Lookit (Scott & Schulz, Reference Scott and Schulz2017). A simulation-based power analysis (1000 simulated datasets) using Experiment 1 results, confirmed that this sample size was sufficient to detect a 20% decrease in the likelihood of using lexical verbs in the static condition in Experiment 2, within each age group, with statistical power >.95.
Materials and procedure. The design was the same as in Experiment 1. However, rather than the stimuli being the dynamic events, they were still frames of the figure (paper toy) located on the ground object (tree or door) from the events used in Experiment 1 (Figure 1). The filler items and practice trials were also static images. In addition, the procedure was the same as Experiment 1. The coding procedure was the same as Experiment 1, and the inter-rater reliability was 98%.
3.2 Results
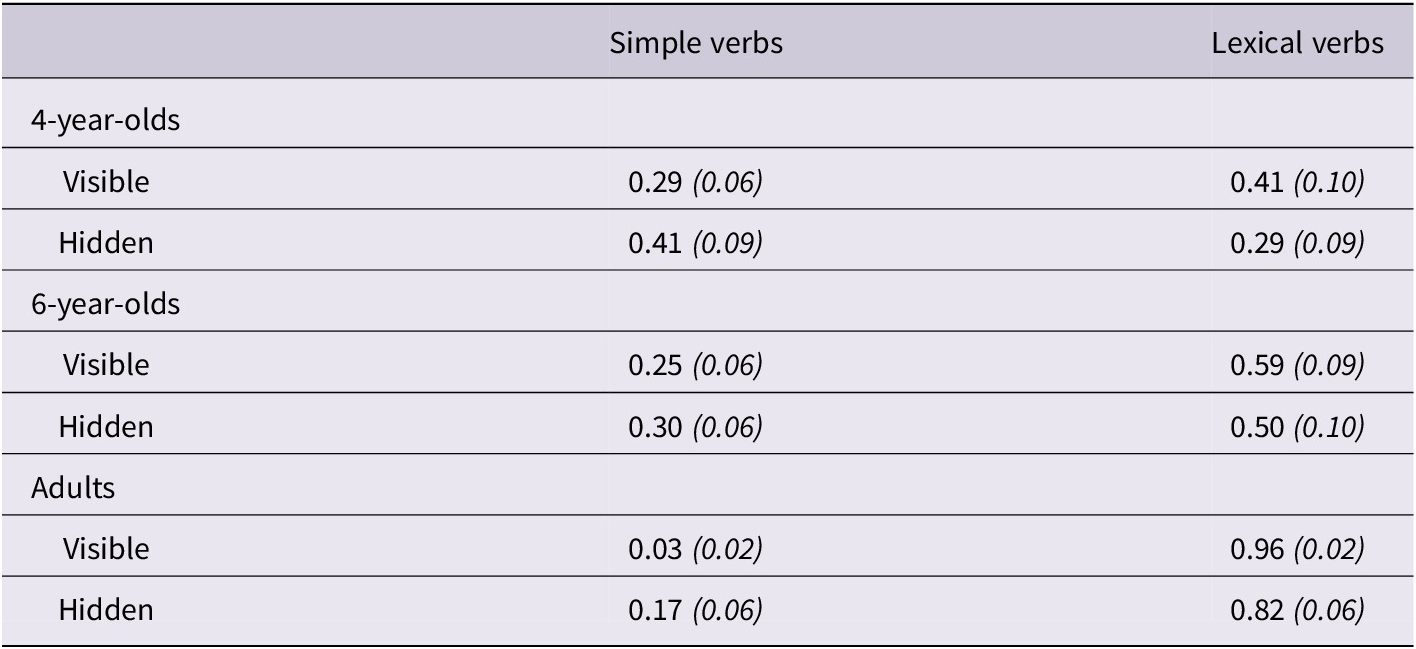
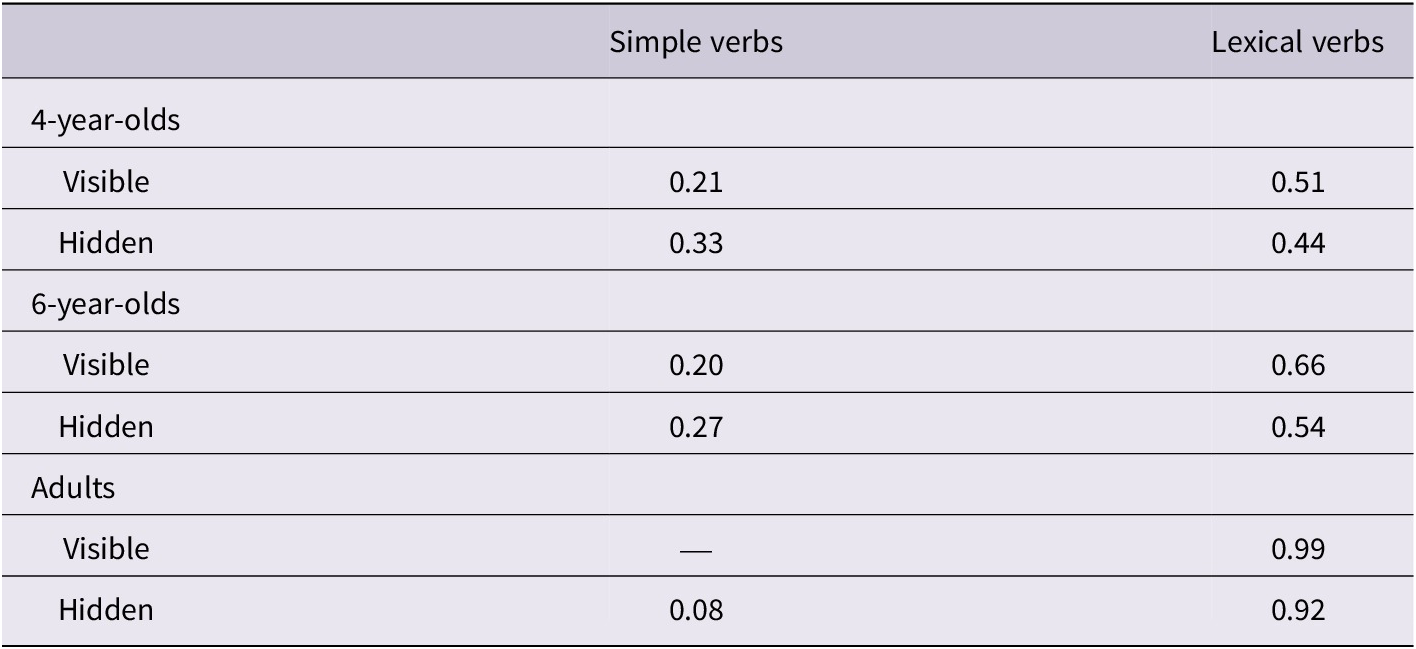
Lexical verb use in static configurations. As shown in Table 3, all groups used lexical verbs (i.e., Orientation, General, and Specific Verbs of Attaching) over 40% when describing the visible mechanism events and above 29% when describing hidden mechanism events (Table 3). Binomial logistic regression was conducted on participants’ likelihood to include a lexical verb in their description compared with all other verb types using the same model as Experiment 1. Mechanism visibility and Age significantly predicted lexical verb use; participants were less likely to use lexical verbs to describe static configurations that had a hidden mechanism compared with those that had a visible mechanism (β = −1.15, 95% CI = −1.73 to −0.56, p < .001). There were no significant differences in lexical verb use between four- and six-year-olds (β = 1.198, 95% CI = −0.457 to 2.85, p = .16). However, compared with six-year-olds, adults were more likely to use lexical verbs in their descriptions (β = 3.782, 95% CI = 1.96 to 5.603, p < .001).
Mean proportions (with standard errors) of simple versus lexical verbs for 4-year-olds, 6-year-olds, and adults by visible and hidden stimuli

Distribution of lexical verb category use in static events. We next tested the types of lexical verbs participants used to describe static configurations, and how mechanism visibility impacted the types of verbs used. To test this, we conducted a mixed-effects multinomial regression analysis using the same model as Experiment 1. There was a significant effect of Mechanism visibility and Age (see Figure 3). First, across Age, Mechanism visibility impacted the type of lexical verbs used by participants. Relative to the influence of visibility on Orientation Verbs, participants were less likely to use Specific Verbs of Attaching; β = −2.202, 95% CI = −3.029 to −1.375, p < .001 (see Appendix A). In contrast, the change in the use of General Verbs of Attaching relative to Orientation Verbs did not differ significantly for visible versus hidden configurations; β = 0.589, 95% CI = −0.46 to 1.64, p = .271. Compared with four-year-olds, there was no significant change in the use of General Verbs of Attaching relative to Orientation Verbs for six-year-olds (β = −2.395, 95% CI = −5.04 to 0.253, p = .076). In contrast, Specific Verbs of Attaching increased for six-year-olds (β = 1.96, 95% CI = 0.024 to 3.89, p = .047). From six-year-olds to adults, the likelihood of using General Verbs of Attaching and Specific Verbs of Attaching (relative to Orientation Verbs) increased significantly, respectively: β = 4.023, 95% CI = 1.55 to 6.5, p = .001 and β = 2.48, 95% CI = 0.916 to 4.042, p = .002.
Lexical verb subclass use for four- and six-year-old children and adults are shown for visible and hidden static configurations.

Additional analyses. As in Experiment 1, we tested the relation of children’s noun knowledge and verb use for the mechanisms (tape, clip, and pin) to explore whether this relation may explain lexical verb use. With the exception of “pin” and “clip” for the four-year-olds, children correctly named the mechanisms over 40% of the time (Mean proportions for four- and six-year-olds, respectively: “clip”: 0.35 and 0.81, “tape”: 0.41 and 0.88, and “pin”: 0.29 and 0.69). Adults correctly named all mechanisms 100% of the time. Similar to Experiment 1, the noun/verb relation was only significant for “clip,” but this time only for four-year-old children (φ = .494, p = .041).
Lexical verb use in dynamic compared with static stimuli. We conducted one final binomial logistic regression analysis to determine whether the kind of stimuli (dynamic vs. static) impacted participants’ use of lexical verbs. Given participants’ use of lexical verbs differed between visible and hidden mechanisms, we conducted separate analyses for this final cross-experiment comparison. For both Mechanism visibilities (visible/hidden), Age group (four-years vs. six-years vs. adults) and Experiment (dynamic vs. static) were entered as fixed effects and random intercepts for Participants. We used simple effect coding for Experiment and repeated effect coding for Age group (four-year-olds vs. six-year-olds, six-year-olds vs. adults). For both visible and hidden mechanism trials, there was a significant main effect of Age. There were no significant differences between four- and six-year-olds (visible: β = 0.274, 95% CI = −1.33 to 1.88, p = .739; hidden: β = −0.521, 95% CI = −2.26 to 1.22, p = .558). In contrast, compared with six-year-olds, adults were more likely to include lexical verbs in their responses (visible: β = 5.75, 95% CI = 3.86 to 7.64, p < .001; hidden: β = 6.37, 95% CI = 4.31 to 8.43, p < .001). In addition, there was no evidence of differences between Experiment 1 and 2 for either visible or hidden mechanism configurations; β = −0.606, 95% CI = −1.99 to 0.79, p = .391 and β = −0.99, 95% CI = −2.41 to 0.43, p = .173, respectively (see Appendix A).
4 General discussion
We explored children’s linguistic encoding of mechanical support, focusing on dynamic events of an agent attaching a figure to a ground via a visible or hidden mechanism (e.g., girl tapes a picture on a tree). Notably the configurations were designed such that they could be described with Verbs of Attaching (e.g., “stick,” “tape”) or Orientation Verbs (“hang”) (or other verbs, such as Simple Verbs – “put,” etc.). For Experiment 1 (dynamic events) the findings revealed that children, especially four-year-olds, used lexical verbs more than reported in previous research (4% Johannes et al., Reference Johannes, Wilson and Landau2016; 5.3% adhesion and 12% hanging Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024; 1.5% Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017). Yet, adults continued to use more lexical verbs than children (no differences were observed between four- and six-year-olds). Children and adults used lexical verbs more when mechanisms were visible compared with when mechanisms were hidden. Further, when examining the types of mechanical support lexical verbs used by children and adults, whereas adults used primarily Verbs of Attaching (Specific for visible mechanism events; e.g., “tape,” and General for hidden mechanism events; e.g., “stick”), children used mostly Orientation Verbs (“hang”).
The same pattern of results was observed for Experiment 2, where the static end-state support configurations of the dynamic events were shown but the instructions eliciting the language descriptions remained the same as Experiment 1 (“Can you tell me what my sister did with the toy?”). Children continued to use lexical verbs of mechanical support more frequently than that reported in previous research, but significantly less often than adults. And, similar to Experiment 1, children and adults used lexical verbs more for the visible mechanism configurations compared with the hidden mechanism configurations. Further, also similar to Experiment 1, whereas adults used mostly Verbs of Attaching (e.g., “tape,” “clip,” “stick”), children (especially the four-year-olds) used mostly Orientation Verbs (“hang”).
These results (1) delineate the semantic space of mechanical support verbs for children (four-to-six years) and adults, and (2) shed light on the contextual conditions that elicit mechanical support verbs. We consider each of these in turn.
First, the clear increase in lexical verb use, especially by four-year-olds, compared with previous research (Johannes et al., Reference Johannes, Wilson and Landau2016; Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024; Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017) suggests that young children have knowledge of, at least some, mechanical support lexical verbs. This is consistent with research measuring comprehension in very young children. For example, in one study (Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024), when hearing “Point to the toy that sticks to the box. Can you point to the toy that sticks to the box?,” 20-month-olds were more likely to look at a support-via-side configuration (girl putting a toy on the side of the box) versus a support-via-below configuration (girl putting a toy on top of the box), suggesting that they were sensitive to the meaning of the lexical verb “stick.” Further, older children in a forced-choice task (Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024) were more likely to select a lexical verb (e.g., hanging from) over a non-lexical verb (e.g., is on) when asked to select the best description for static configurations of support (e.g., smock on hook). These findings, in addition to the current findings with production, establish that children by four years have mechanical support lexical verbs in their lexicons. Yet, this does not mean that children have reached the adult state. Quite the contrary; in the current study, although no differences were observed between four- and six-year-olds, children used fewer mechanical support lexical verbs than adults. Further, when children did use mechanical support verbs, they used more Orientation Verbs (“hang”) compared with Verbs of Attaching (e.g., “stick,” “tape”); adults showed the opposite pattern.
What causes the increase in the production of lexical mechanical support verbs after six years of age? And, further, what causes the more frequent use of Orientation Verbs over Verbs of Attaching for children? Perhaps, as Johannes et al. (Reference Johannes, Wilson and Landau2016) suggest, as children acquire more lexical verbs (such as “hang,” “tape,” and “clip”), lexical verbs may win when competing against simple verbs of support, such as “be” and “put.” But still, this leaves open the question of what factors – linguistic, non-linguistic, or both – play a role in children’s acquisition of mechanical support lexical verbs, and how these factors interact to delineate the semantic space of mechanical support for children, such that Orientation Verbs > Verbs of Attaching.
Recall that Levin’s (Reference Levin1993) linguistic analysis distinguishes between Orientation Verbs (e.g., “hang”) and Verbs of Attaching (e.g., “stick,” “attach,” “tape,” “clip,” “pin”). Orientation Verbs encode the spatial configuration of the figure object relative to the ground object (e.g., “The toy hangs on the tree.”), but these verbs do not encode the support mechanism. However, Verbs of Attaching encode the support mechanism, with General Verbs of Attaching (e.g., “stick”) referring to a property of the mechanism, and Specific Verbs of Attaching (e.g., “tape,” “clip”) referring to the specific fastener that is used for support. Correct use of English verbs like “tape,” “glue,” “clip,” and so on requires that children understand, to some extent, (1) that the mechanism can cause an object to be supported by another object, (2) the kind of mechanism that it is (tape vs. glue vs. clip, etc.), and (3) the label that maps to the conceptual representation. Considering this last point – learning the label to concept mapping – according to Levin (Reference Levin1993), in English, there are about 60 Verbs of Attaching. In contrast, there are only about 20 Orientation Verbs, and when focusing on Orientation Verbs encoding support, there are only two (“hang” and “dangle”). Thus, the acquisition of the Verbs of Attaching sub-class may be piecemeal and idiosyncratic. We hypothesise that it may depend on children’s experiences using the mechanisms (e.g., using glue in art, taping pictures to a window), as well as parent and teacher input (see Lakusta et al., Reference Lakusta, Hussein, Wodzinski and Landau2021 for a discussion on parent input in physical support language). To the extent that input and experience related to Verbs of Attaching are more variable relative to Orientation Verbs, children’s acquisition of Verbs of Attaching may follow a slower developmental time course.
In addition to the possibilities discussed above, for Specific Verbs of Attaching, children’s noun knowledge may play a role. Our additional exploratory analyses shed some light on this; our findings suggest that for “clip,” a relationship was found between children’s knowledge of the noun label for the mechanism and use of the corresponding lexical verb (however, no relationship was found for “tape” and “pin”). Future research can explore whether and how the acquisition of nouns that label mechanisms bootstraps the acquisition of the corresponding lexical verbs. Such a research question would be important to test across different languages given that languages seem to differ in the number of nominal encoding mechanisms (e.g., Spanish has far fewer than English; Pinzon-Henao et al., Reference Pinzón-Henao, Barbosa, Pasquella, Muentener and Lakusta2024).
Another possible explanation of why children may prefer Orientation Verbs (“hang”) when describing mechanical support is that they have an orientation-biased perspective. Recall that our stimuli were constructed such that either the orientation or the mechanism could be encoded when describing the mechanical support. Children may preferentially attend to the orientation of the figure (how it is spatially located relative to the ground) over the mechanism, and use “hang.” If so, could this reflect the path bias that has been reported for children in previous studies examining the manner of motion event encoding? For example, Maguire et al. (Reference Maguire, Hirsh-Pasek, Golinkoff, Imai, Haryu, Vanegas, Okada, Pulverman and Sanchez-Davis2010) presented English-, Spanish-, and Japanese-speaking toddlers, preschoolers, and adults with novel verbs (“blicking”) and novel actions and tested whether participants mapped the novel verb to the manner or path. They found that regardless of their native language, children displayed a preference to map a novel verb to the path of the event over the manner of action (whereas English-speaking adults showed a manner preference).
We hypothesise that path-in-motion events may be similar to orientation in support events in that both encode the location of the figure relative to the ground (e.g., the girl moves away from the tree/the girl hangs the toy from the tree). And, the manner in motion events may be similar to mechanisms in support events in that both encode the way in which something moves/is attached (e.g., the girl runs …/the girl tapes …). Future work in our lab is further exploring how children and adults map language to the orientation and mechanism in support events by conducting cross-linguistic studies. Given that languages vary in their lexicalisation patterns in encoding path and manner, we predict that lexicalisation differences may be observed for the domain of Mechanical Support as well (see Pinzón-Henao et al., Reference Pinzón-Henao, Barbosa, Pasquella, Muentener and Lakusta2024, for preliminary data supporting this hypothesis).
Turning now to the contextual conditions that elicit mechanical support verbs, our findings shed light on the roles of event versus state construals and visible versus hidden mechanisms. Considering first an event versus state construal, previous research reports low levels of lexical verb use by four-year-olds when describing support configurations in static states (4%—Johannes et al., Reference Johannes, Wilson and Landau2016; 5.3% adhesion and 12% hanging—Lakusta et al., Reference Lakusta, Wefferling, Elgamal and Landau2024; 1.5%—Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017). Based on these findings, we hypothesised that children would be more likely to use mechanical support lexical verbs (e.g., “hang,” “stick,” “tape”) if the support were part of a dynamic event with a causal agent rather than a static end state (see Introduction which explains our motivation for this hypothesis). Our prediction was supported in Experiment 1; when describing dynamic events, children produced higher overall levels of mechanical support lexical verbs, compared with the previous research (i.e., ranging from .30 to .60 across age and visibility contrasts; Table 2). Then in Experiment 2, we used the same procedure as Experiment 1, except rather than showing participants the dynamic event, they only viewed the static end state. However, as in Experiment 1 (but unlike previous studies), participants were asked, “What did my sister do with the toy? Given the results of the previous research using static end states, one may have expected children, especially 4-year-olds, to use BE on more often and lexical verbs less often (compared with Experiment 1). However, this is not what we found. Rather, children’s use of lexical verbs did not significantly differ between Experiments 1 and 2. Why did children use more lexical verbs when describing static configurations in our study compared with the previous research using static configurations? We speculate that our method – specifically the way we asked the children to describe the configurations – played a key role in their use of lexical verbs. That is, asking participants, “What did my sister do with the toy?,” may have prompted an event perspective (recall, that in Johannes et al., Reference Johannes, Wilson and Landau2016, participants were asked, “Where is the [figure object]?”). Semantic theory lends some support to this possibility; Jackendoff (Reference Jackendoff1983) explains that an important distinction between events and states is the result of questions such as “what happened/occurred”; an event refers to the thing that is happening. Thus, when participants were asked, “What did my sister do with the toy?,” they may have been prompted to consider what happened (even in the case of Experiment 2, where this would need to be inferred) and respond with a description that included a causal agent and lexical verb. This interpretation should be considered with caution since it is post hoc, but if correct, it would suggest that it is not necessarily the dynamic nature of events that plays a role in eliciting lexical verbs; rather, establishing an event perspective may be sufficient.
One limitation of the current study is that we did not include all the necessary conditions to test the extent to which motion, prompt, and so on play a role in eliciting lexical verbs. Future research can do this by systematically manipulating the motion in the event (event vs. state) and the prompt given to participants (event prompt: “What did my sister do with the toy?,” similar to the current experiment) versus (static description prompt, similar to previous studies: for adults, “Where is the [object pointed to]?,” and for children, “Where is the [object previously labelled by child]?” [Johannes et al., Reference Johannes, Wilson and Landau2016] and “What’s the arrow pointing to?” followed by “Where is the [object]?” [Landau et al., Reference Landau, Johannes, Skordos and Papafragou2017]). Another question to be explored is what exactly leads children to use lexical verbs more frequently when representing the support as part of an event (vs. state). Perhaps children encode/infer an agent which then increases the likelihood of using a lexical verb (see Introduction)? And/or do children attend more to the orientation and/or mechanism of the attachment when construing the support as an event? Future research, perhaps using eye-tracking, can explore these possibilities.
Considering the visibility of the mechanism, across both experiments, lexical verbs were more likely to be used to describe events and states with visible (vs. hidden) mechanisms, and visibility also influenced the type of lexical verbs used. All groups used fewer Specific Verbs of Attaching (e.g., “tape”) when the mechanism was hidden, which may not be surprising given that when the specific fastener is not visible, one would need to infer what is causing the support (stickiness from tape, a nail, a magnet, etc.). However, it is notable that children did sometimes use the Verbs of Attaching to encode hidden mechanism events, suggesting that they are able to make these inferences. Such results are consistent with causal learning research showing that children adopt a deterministic view of events (i.e., all events have causes) and can infer the presence of hidden generative factors (e.g., Schulz & Sommerville, Reference Schulz and Sommerville2006). Future research can further explore whether factors shown to influence children’s causal reasoning abilities (e.g., the consistency of cause–effect outcomes; Legare et al., Reference Legare, Gelman and Wellman2010) also impact children’s use of mechanical support language.
In conclusion, the current findings suggest that children as young as four use lexical verbs to encode mechanical support when an event representation is elicited (either via being directly viewed or by being prompted), yet they do so less frequently than adults. Further, when examining the types of lexical verbs used, children and adults show different preferences; children prefer to encode the orientation of the figure (with verbs such as “hang”), whereas adults prefer to encode the mechanism (with verbs such as “tape” or “stick”), raising the question of why children show an orientation bias and how they eventually learn the adult pattern. Finally, both children and adults use fewer Specific Verbs of Attaching to encode mechanical support when the mechanism is hidden, suggesting that the visibility of the mechanism impacts verb choice; yet the observation that some specific lexical verbs were used even by the four-year-olds suggests that children make inferences about mechanisms when not visibly available. In sum, the current findings raise several questions for future research concerning children’s nonlinguistic representations of mechanisms, as well as cross-linguistic lexicalisation patterns that may characterise this domain.
Acknowledgements
We acknowledge Barbara Landau for thoughtful discussions that significantly contributed to the ideas explored and discussed in this research. We thank all of the children and parents that have participated in this study. This research was partially supported by NSF grant 1650861.
Competing interest
There are no competing interests for the authors in this study.
Appendix A
Experiment 1 and 2 results
Interactions. In Experiment 1 Results under “Lexical Verb Use for Dynamic Events,” there was a significant interaction between Age and Visibility, p = .029. Relative to the effect of visibility on four-year-olds’ use of lexical verbs, six-year-olds used less lexical verbs for hidden events than for visible events (β = −2.02, 95% CI = −3.59 to −0.46, p = .011). While visibility had relatively little effect on four-year-olds, six-year-olds were less likely to use lexical verbs for hidden events.
In Experiment 2 Results under “Lexical Verb Use in Dynamic Compared with Static Stimuli,” there was a significant interaction between Age and Experiment for hidden configurations (p = .012). Relative to the effect of Experiment (dynamic vs. static) on four-year-olds, six-year-olds were more likely to use lexical verbs for Experiment 2 (static) than for Experiment 1 (dynamic) (β = 4.45, 95% CI = 0.98 to 7.92, p = .012). In addition, compared with six-year-olds, adults were less likely to use lexical verbs for Experiment 2 compared with Experiment 1 (β = −4.64, 95% CI = −8.03 to −1.25, p = .007).
Review phase
In Experiment 1 Results under “Lexical Verb Use for Dynamic Events,” when analysing participants’ responses in the review phase, Mechanism Visibility was no longer a significant predictor (p = .938). This is because children’s use of lexical verbs for the hidden mechanism events increased (Ms = .59) for four- and six-year-olds; the proportion of lexical verb use for the visible mechanism events stayed the same.
In Experiment 2 Results under “Distribution of Lexical Verb Category Use in Static Events,” the difference between four-year-olds’ and six-year-olds’ use of Specific Verbs of Attaching relative to Orientation Verbs was no longer significant when analysing participants’ responses in the review phase (β = 1.132, 95% CI = −0.649 to 2.914, p = .213).
Appendix B
Mean proportions of simple versus lexical verbs for 4-year-olds, 6-year-olds, and adults by visible and hidden stimuli for Experiment 1 (including responses from the “review phase”)

Mean proportions of simple versus lexical verbs for 4-year-olds, 6-year-olds, and adults by visible and hidden stimuli for Experiment 2 (including responses from the “review phase”)



 Open access
Open access