


1. Introduction
In a multi-platform and multi-sensor target tracking system, information fusion can improve the performance of detection, identification and tracking. However, the use of multiple sensors usually leads to a more prominent problem, namely sensor calibration or registration. Sensor registration is an inherent problem in a multi-sensor system, which requires the estimation of sensor bias and compensates the measured data with the estimated bias, to remove the influence of system bias. If the sensor bias is directly used for data fusion without registration, the bias will lead to a large tracking error or even multiple false points for the same target. Sensor bias mainly includes sensor registration deviation, sensor clock deviation, sensor position bias and azimuth deviation. Due to the coupling relationship between the different types of bias, there is no effective method to estimate all the biases at the same time. This paper mainly considers the registration bias of the sensor, and assumes that the clock, position and orientation of the sensor itself are not biased.
With the in-depth study of data fusion theory and technology, the registration problem has attracted the attention of many scholars at home and abroad (Wang et al., Reference Wang, Chen and Jia2013; Chen et al., Reference Chen, Qu, Bo, Ling and Zhang2018). Some registration algorithms of constant bias for sensor networking have been proposed successively, such as the real-time quality control method (RTQC) (Chen et al., Reference Chen, Qu, Bo, Ling and Zhang2018), Kalman filter (KF) (Chen et al., Reference Chen, Wang, He and Progri2014), extended state Kalman filter (ESKF) (Yong et al., Reference Yong, Wu, Tu, Du and Zhang2018), least square (LS) (Ventikos et al., Reference Ventikos, Sotiralis and Drakakis2017) and accurate maximum likelihood method (EML) (Antoniou et al., Reference Antoniou, Cherniakov, Hoare, Daniel and Shariff2017), Gaussian mean shift registration (MSR) (Qi et al., Reference Qi, Jing, Hu and Zhao2008), etc. In a real system, when the environment of the sensor changes suddenly, the sensor bias may change suddenly and then remain at a fixed value. In view of this registration deviation, Okello and Challa (Reference Okello and Challa2004) described sensor registration and target track as a Bayesian estimation problem, and proposed an equivalent measurement registration method. The Unscented Kalman Filter (UKF) registration method was proposed by Li and Leung (Reference Li, Leung and Zhou2004). This involved the UKF estimation of sensor bias and target state simultaneously by the expanded state equation and the measuring equation. In this case, using the traditional registration algorithm, the estimation effect will be seriously worse when the bias changes. In the literature (Tomas et al., Reference Tomas, Jana and Matas2014; Zhu and Wang, Reference Zhu and Wang2018), a mean-shift bias estimation method is proposed to solve the registration when the variation law of systematic errors is known, assuming that the variation law of systematic errors is known. However, in practical applications, the variation law of systematic errors is generally unknown. However, none of the above methods can estimate this type of bias. Lin, Bar-shalom et al. proposed an ‘exact’ (EX) estimation method that can be used to solve dynamic deviations, which is essentially a root-mean-square minimum error estimator. However, this method is based on the multi-frame and multi-target method. As the number of targets decreases, the estimation accuracy of this method will decrease. To solve this problem, an improved mean-shift-based sensor dynamic bias estimation method is proposed in this paper. The algorithm can effectively adapt to the change of sensor system bias and has high estimation accuracy when the change law of sensor system bias is unknown.
2. Problem description
Considering the detection of the target by n radars, $({{r_i},{\beta_i},{\varepsilon_i}} )(i\textrm{ = }1,\ldots , n)$ represents the detection value of the distance, azimuth and elevation angle of the i-th radar to the space target, and the relationship between the detection value and the true value $({{r_{i,\textrm{true}}},{\beta_{i,\textrm{true}}},{\varepsilon_{i,\textrm{true}}}} )(i\textrm{ = }1,\ldots , n)$
represents the detection value of the distance, azimuth and elevation angle of the i-th radar to the space target, and the relationship between the detection value and the true value $({{r_{i,\textrm{true}}},{\beta_{i,\textrm{true}}},{\varepsilon_{i,\textrm{true}}}} )(i\textrm{ = }1,\ldots , n)$ is as follows:
is as follows:

where radar error can be expressed as radar bias plus random noise:
where $\varDelta {r_{ib}}$ , $\varDelta {\beta _{ib}}$
, $\varDelta {\beta _{ib}}$ and $\varDelta {\varepsilon _{ib}}$
and $\varDelta {\varepsilon _{ib}}$ are the biases of the range, azimuth and elevation measurements, respectively, $\varDelta {r_{\textrm{in}}}$
are the biases of the range, azimuth and elevation measurements, respectively, $\varDelta {r_{\textrm{in}}}$ , $\varDelta {\beta _{\textrm{in}}}$
, $\varDelta {\beta _{\textrm{in}}}$ and $\varDelta {\varepsilon _{\textrm{in}}}$
and $\varDelta {\varepsilon _{\textrm{in}}}$ are independent Gaussian white noise.
are independent Gaussian white noise.
The purpose of this paper is how to estimate the biases of each radar relative to the main radar on the same platform in real time when the biases of each radar changes slowly. To simplify the description, the following algorithm takes two three-dimensional (3D) radars as an example.
3. Bias estimation model
According to the expression of Equation (1), the true value of radar $i(i\textrm{ = }1,2)$ at detection time k is
at detection time k is

In the common geographic rectangular coordinate system, the truth value of the radar detection target is

where $\left[ \begin{array}{@{}l@{}} {{\bar{x}}_{i,\textrm{true}}}(k )\\ {{\bar{y}}_{i,\textrm{true}}}(k )\\ {{\bar{z}}_{i,\textrm{true}}}(k )\end{array} \right](i\textrm{ = 1},2)$ is the position of the target detected by radar i in the common coordinate system, $\left[ \begin{array}{@{}l@{}} {u_i}(k )\\ {v_i}(k )\\ {w_i}(k )\end{array} \right](i\textrm{ = }1,2)$
is the position of the target detected by radar i in the common coordinate system, $\left[ \begin{array}{@{}l@{}} {u_i}(k )\\ {v_i}(k )\\ {w_i}(k )\end{array} \right](i\textrm{ = }1,2)$ is the position of the i-th radar in the common coordinate system and $\left[ \begin{array}{@{}l@{}} \Delta {u_i}\\ \Delta {v_i}\\ \Delta {w_i} \end{array} \right]({i\textrm{ = }1,2} )$
is the position of the i-th radar in the common coordinate system and $\left[ \begin{array}{@{}l@{}} \Delta {u_i}\\ \Delta {v_i}\\ \Delta {w_i} \end{array} \right]({i\textrm{ = }1,2} )$ is the platform position error.
is the platform position error.
In the common geographic rectangular coordinate system, the truth values of the targets detected by the two radars should coincide, i.e.
In the common geographic rectangular coordinate system, the value of the target actually detected by the i-th radar is

According to Equation (7), the observation equation of the two radars' bias can be calculated by making the difference between the two radars’ detection data:
where $\left[ \begin{array}{@{}l@{}} u(k )\\ v(k )\\ w(k )\end{array} \right]\textrm{ = }\left[ \begin{array}{@{}l@{}} {u_1}(k )\\ {v_1}(k )\\ {w_1}(k )\end{array} \right] - \left[ \begin{array}{@{}l@{}} {u_2}(k )\\ {v_2}(k )\\ {w_2}(k )\end{array} \right] + \left[ \begin{array}{@{}l@{}} \Delta {u_2} - \Delta {u_1}\\ \Delta {v_2} - \Delta {v_1}\\ \Delta {w_2} - \Delta {w_1} \end{array} \right]$ is the relative position of the two radars and $\Psi (k )$
is the relative position of the two radars and $\Psi (k )$ is the bias value of two radars detecting the same target in the geographic coordinate system.
is the bias value of two radars detecting the same target in the geographic coordinate system.
Furthermore, in the actual system, the bias is generally small, so the Taylor first-order expansion of the bias parameters can be carried out. According to Equations (6) and (8), the following bias equation can be obtained:

where $H(k )\textrm{ = }[{{J_1}(k ), - {J_2}(k )} ]\textrm{ = }{[{h_{ij}}(k )]_{3 \times 6}}$ ; $M(k)\textrm{ = }H(k);$
; $M(k)\textrm{ = }H(k);$

$V\textrm{ = }{({\varDelta {r_{1n}},\varDelta {\theta_{1n}},\varDelta {\varepsilon_{1n}},\varDelta {r_{2n}},\varDelta {\theta_{2n}},\varDelta {\varepsilon_{2n}}} )^T}$ . The formula for ${J_i}(k)\,(i\textrm{ = }1,2)$
. The formula for ${J_i}(k)\,(i\textrm{ = }1,2)$ is
is
Since the distance between the radars is small (relative to the observation target), ${{\partial {x_2}(k )} / {\partial \Delta {r_2}(k )}} \approx {{\partial {x_1}(k )} / {\partial \Delta {r_1}}}(k )$ , ${{\partial {y_2}(k )} / {\partial \Delta {\beta _2}(k )}} \approx {{\partial {y_1}(k )} / {\partial \Delta {\beta _1}(k )}}$
, ${{\partial {y_2}(k )} / {\partial \Delta {\beta _2}(k )}} \approx {{\partial {y_1}(k )} / {\partial \Delta {\beta _1}(k )}}$ , ${{\partial {z_2}(k )} / {\partial \Delta {\varepsilon _2}(k )}} \approx {{\partial {z_1}(k )} / {\partial \Delta {\varepsilon _1}(k )}}$
, ${{\partial {z_2}(k )} / {\partial \Delta {\varepsilon _2}(k )}} \approx {{\partial {z_1}(k )} / {\partial \Delta {\varepsilon _1}(k )}}$ can be approximated, so Equation (9) can be approximated as
can be approximated, so Equation (9) can be approximated as

where k stands for detection time, $C(k)\textrm{ = }[{{J_1}(k)} ]\textrm{ = }{[{c_{ij}}(k )]_{3 \times 3}}\textrm{ = }\left[ {\begin{array}{@{}ccc@{}} {\dfrac{{\partial {x_1}(k )}}{{\partial \Delta {r_1}(k )}}}& {\dfrac{{\partial {x_1}(k )}}{{\partial \Delta {\beta_1}(k )}}}& {\dfrac{{\partial {x_1}(k )}}{{\partial \Delta {\varepsilon_1}(k )}}}\\ {\dfrac{{\partial {y_1}(k )}}{{\partial \Delta {r_1}(k )}}}& {\dfrac{{\partial {y_1}(k )}}{{\partial \Delta {\beta_1}(k )}}}& {\dfrac{{\partial {y_1}(k )}}{{\partial \Delta {\varepsilon_1}(k )}}}\\ {\dfrac{{\partial {z_1}(k )}}{{\partial \Delta {r_1}(k )}}}& {\dfrac{{\partial {z_1}(k )}}{{\partial \Delta {\beta_1}(k )}}}& {\dfrac{{\partial {z_1}(k )}}{{\partial \Delta {\varepsilon_1}(k )}}} \end{array}} \right]$ ; $N(k)\textrm{ = }C(k)$
; $N(k)\textrm{ = }C(k)$ ;
;


4. Gaussian mean-shift bias estimation
4.1 Gaussian mean-shift algorithm
The Gaussian mean-shift algorithm is a non-parametric density estimation algorithm, which is a method of recovering the probability density function of a set of data and finding the extreme points of the probability density function (Tomas et al., Reference Tomas, Jana and Matas2014). The Gaussian mean-shift algorithm can be expressed as follows (Yang et al., Reference Yang, Rahardja and Frnti2021).
For a given d-dimensional space ${R^d}$ with N sample points ${x_i}$
with N sample points ${x_i}$ , i = 1,…,N, the basic form of the mean-shift vector at point ${x_{}}$
, i = 1,…,N, the basic form of the mean-shift vector at point ${x_{}}$ is
is
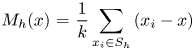
Here, k means that there are k sample points in the area ${S_h}$ , and ${S_h}$
, and ${S_h}$ is a high-dimensional spherical area with a radius of h, that is, the set of y points that satisfy the following relationship (Bhat et al., Reference Bhat, Subudhi, Veerakumar, Caterina and Soraghan2021):
is a high-dimensional spherical area with a radius of h, that is, the set of y points that satisfy the following relationship (Bhat et al., Reference Bhat, Subudhi, Veerakumar, Caterina and Soraghan2021):

It can be seen that $({x_\textrm{i}} - x)$ is the offset vector of sample point ${x_i}$
is the offset vector of sample point ${x_i}$ relative to ${x_{}}$
relative to ${x_{}}$ , and the mean-shift vector is the sum and average of the offset vectors of the k sample points falling in the area ${S_h}$
, and the mean-shift vector is the sum and average of the offset vectors of the k sample points falling in the area ${S_h}$ relative to ${x_{}}$
relative to ${x_{}}$ , so the mean-shift vector points to the direction of the probability density gradient.
, so the mean-shift vector points to the direction of the probability density gradient.
It can be seen from Equation (9) that all sampling points contribute equally to the calculation of ${M_h}(x )$ no matter how far they are from x. However, generally speaking, the closer the sampling point is to x, the more effective it is to estimate the statistical properties around x. Y. Cheng introduced the concept of kernel function to expand the basic mean-shift concept. The expanded form is (Liu et al., Reference Liu, Jing, Nie, Gao, Liu and Jiang2019)
no matter how far they are from x. However, generally speaking, the closer the sampling point is to x, the more effective it is to estimate the statistical properties around x. Y. Cheng introduced the concept of kernel function to expand the basic mean-shift concept. The expanded form is (Liu et al., Reference Liu, Jing, Nie, Gao, Liu and Jiang2019)
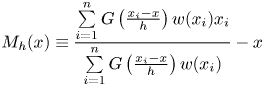
Among them, $G(x)$ is a unit kernel function, h is the bandwidth coefficient and $w({x_i}) \ge 0$
is a unit kernel function, h is the bandwidth coefficient and $w({x_i}) \ge 0$ is the weight assigned to the sampling point ${x_i}$
is the weight assigned to the sampling point ${x_i}$ .
.
4.2 Improved Gaussian mean-shift dynamic bias registration (IGMSR)
When there are N measurement values, the sample set of bias observations that can be obtained is $({\Delta r(k),\Delta \beta (k),\Delta \varepsilon (k)} )k = 1,\ldots , N$ .
.
Take the following kernel function for Equation (11):

where $w({x_i})$ is determined according to the sampling point time and the latest point time as follows:
is determined according to the sampling point time and the latest point time as follows:

Among them, $\lambda$ is a constant in the range of (0,1), $\kappa$
is a constant in the range of (0,1), $\kappa$ is a non-negative constant, ${t_i}$
is a non-negative constant, ${t_i}$ is the sampling time and ${t_k}$
is the sampling time and ${t_k}$ is the current time.
is the current time.
Write the first term on the right of Equation (11) as ${m_h}(x)$ , namely:
, namely:
Given an initial value x, the allowable error $\varepsilon$ , the Improved Gaussian Mean-Shift Dynamic Bias Registration algorithm performs the following steps:
, the Improved Gaussian Mean-Shift Dynamic Bias Registration algorithm performs the following steps:
(1) calculate ${m_h}(x)$
 ;
;(2) assign ${m_h}(x)$
to x;(3) if $||{{m_h}(x) - x} ||< \varepsilon$
is satisfied, end the loop; otherwise, continue to execute step (1).



The convergence of the mean-shift algorithm is discussed in detail in the literature (Comaniciu and Meer, Reference Comaniciu and Meer2002). The convergence of the above algorithms can be referred to the related discussion.
5. Analysis of simulation results
Relative to the fusion centre, the position of radar 1 is $[{10\,\textrm{m},10\,\textrm{m},4\,\textrm{m}} ]$ , and the position of radar 2 is $[{45\,\textrm{m},45\,\textrm{m},5\,\textrm{m}} ]$
, and the position of radar 2 is $[{45\,\textrm{m},45\,\textrm{m},5\,\textrm{m}} ]$ . The detection noise of radar 1 and radar 2 is $\varDelta {r_{1n}}\textrm{ = }\varDelta {r_{2n}}\textrm{ = }100\,\textrm{m},\varDelta {\beta _{1n}}\textrm{ = }\varDelta {\beta _{2n}}\textrm{ = }{0.3^ \circ },\varDelta {\varepsilon _{1n}}\textrm{ = }\varDelta {\varepsilon _{2n}}\textrm{ = }{0.3^ \circ }$
. The detection noise of radar 1 and radar 2 is $\varDelta {r_{1n}}\textrm{ = }\varDelta {r_{2n}}\textrm{ = }100\,\textrm{m},\varDelta {\beta _{1n}}\textrm{ = }\varDelta {\beta _{2n}}\textrm{ = }{0.3^ \circ },\varDelta {\varepsilon _{1n}}\textrm{ = }\varDelta {\varepsilon _{2n}}\textrm{ = }{0.3^ \circ }$ . Target 1 in a straight line, target 2 in a serpentine manoeuvre. Assume that the platform position error of radar 1 is $\Delta {u_1}\textrm{ = }100\,\textrm{m}, \Delta {v_1}\textrm{ = }100\,\textrm{m},\Delta {w_1}\textrm{ = }50\,\textrm{m}$
. Target 1 in a straight line, target 2 in a serpentine manoeuvre. Assume that the platform position error of radar 1 is $\Delta {u_1}\textrm{ = }100\,\textrm{m}, \Delta {v_1}\textrm{ = }100\,\textrm{m},\Delta {w_1}\textrm{ = }50\,\textrm{m}$ , the platform position error of radar 2 is $\Delta {u_2}\textrm{ = } - 100\,\textrm{m},\Delta {v_2}\textrm{ = } - 100\,\textrm{m},\Delta {w_2}\textrm{ = } - 50\,\textrm{m}$
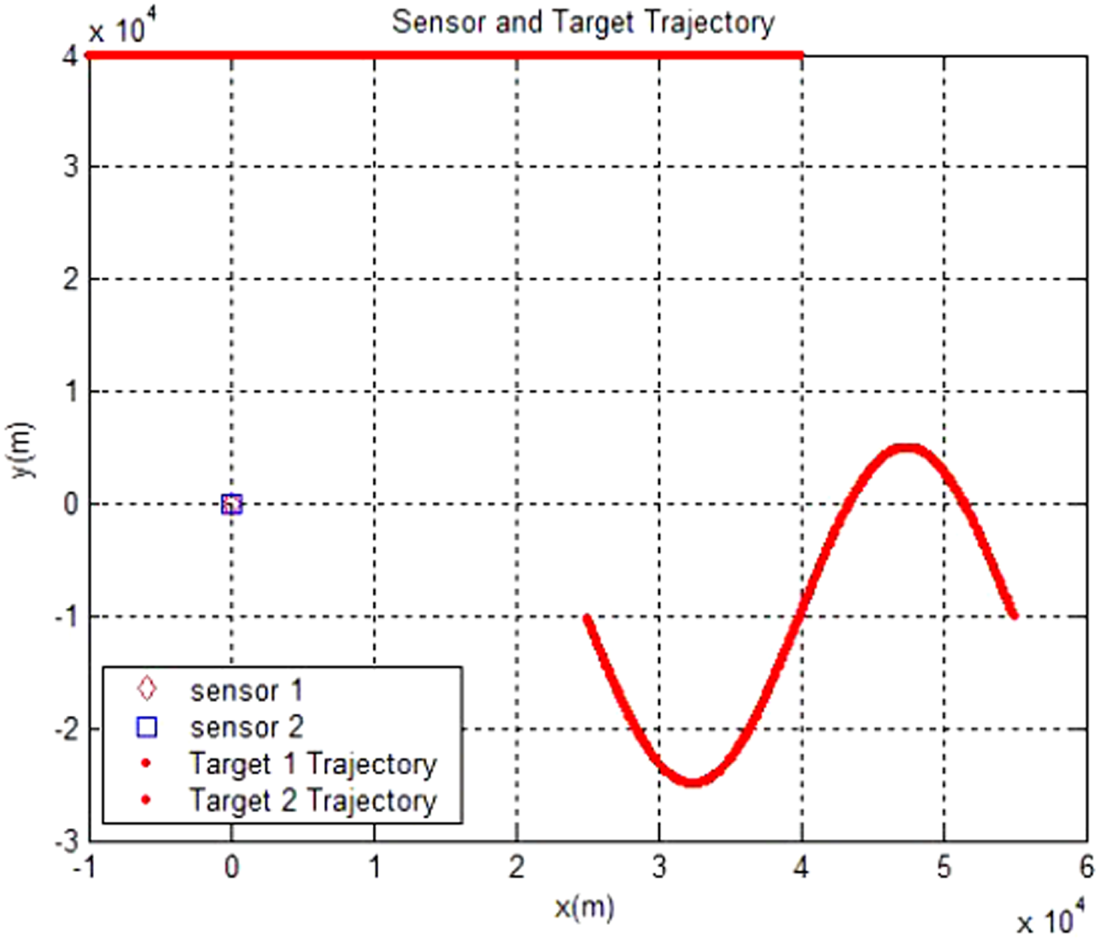
, the platform position error of radar 2 is $\Delta {u_2}\textrm{ = } - 100\,\textrm{m},\Delta {v_2}\textrm{ = } - 100\,\textrm{m},\Delta {w_2}\textrm{ = } - 50\,\textrm{m}$ , The simulation scene is shown in the figure 1 below, and the target movement height is 1000 m.
, The simulation scene is shown in the figure 1 below, and the target movement height is 1000 m.
Schematic diagram of simulation scene tracking
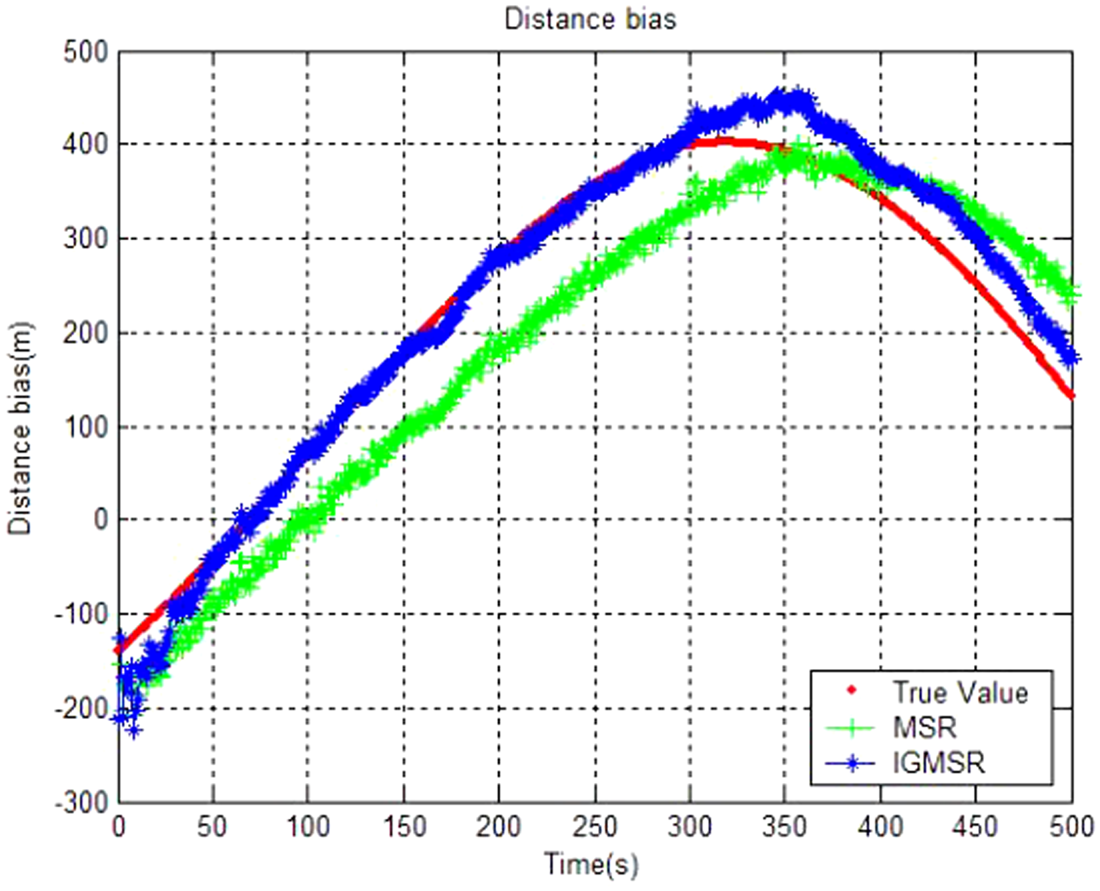
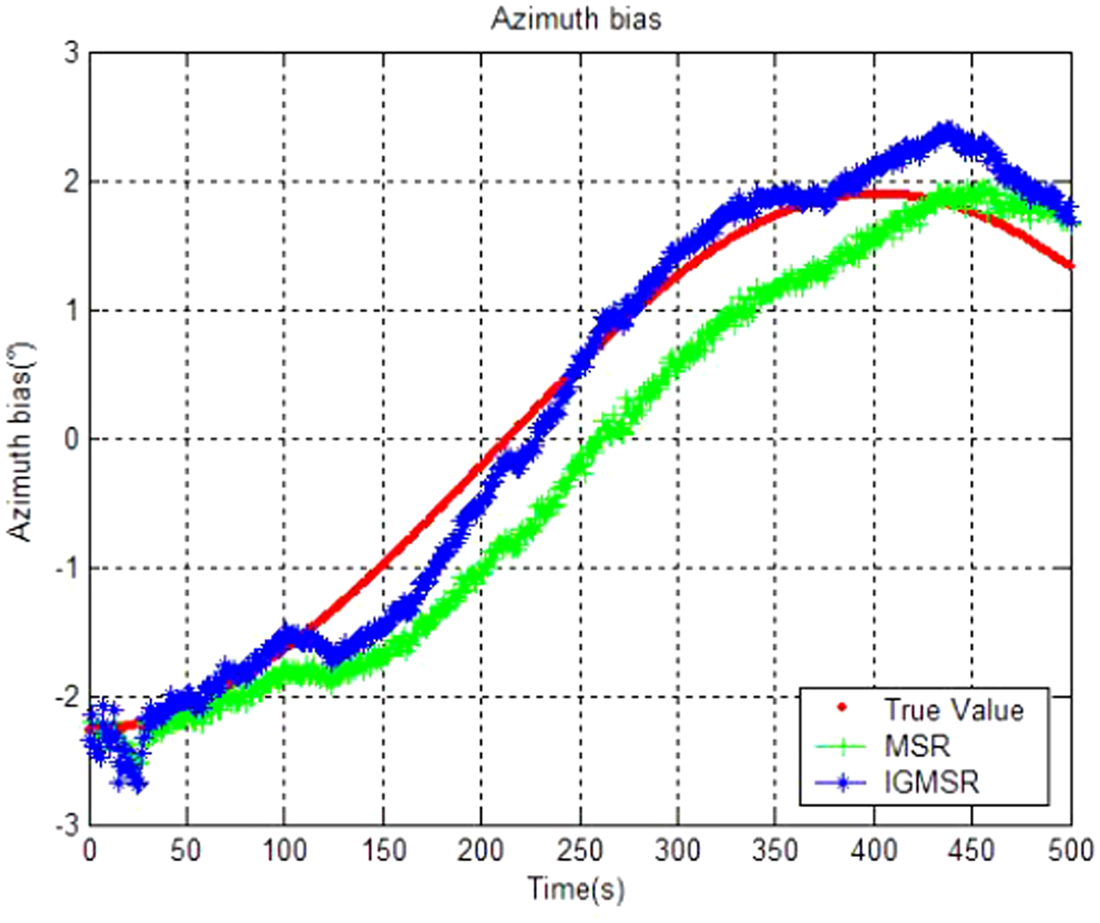
When the biases of the two radars change slowly, the biases estimation results of the method in this paper and the method described by Zhu and Wang (Reference Zhu and Wang2018) (Algorithm 1) are shown in Figures 2–4.
Distance bias estimation results of the two algorithms (Algorithm 1 refers to the MSR)
Azimuth bias estimation results of the two algorithms
Elevation bias estimation results of the two algorithms
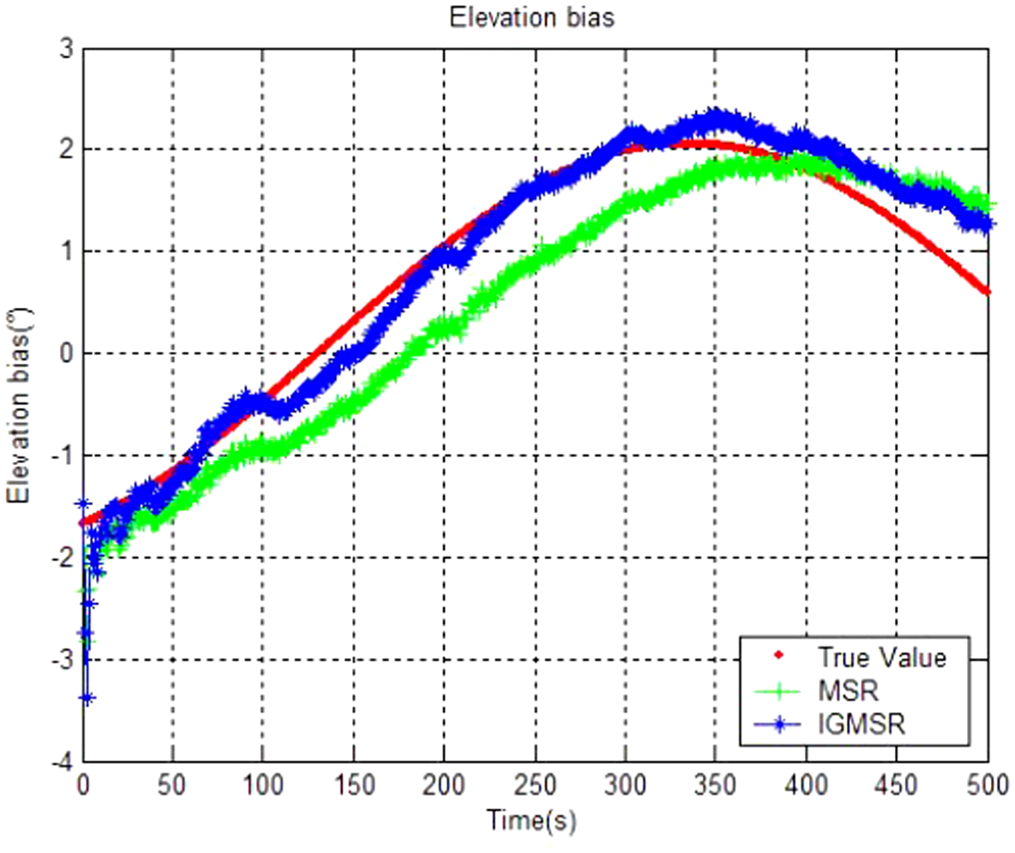
From Figures 2–4, the method used in this paper has more accurate biases estimation results, and the accuracy (percentage) of the real-time estimation results of slowly varying relative biases is shown in Table 1. The percentage of accuracy is calculated as the percentage of the ratio of the estimated bias to the corresponding true value. If the true value of the bias is close to 0 or less than the detection noise, it will not participate in the statistical calculation.
Biases registration accuracy

7. Summary
In perspective of the characteristics of actual radar detection system error characteristic of changing slowly with time, this paper proposes an improved version of the mean-shift radar relative registration algorithm, which can effectively adapt to the change of system error under the condition of the unknown variation law of system error. The simulation results show that more than 90% relative biases can be eliminated for constant biases. For the slowly changing biases, more than 80% of the relative biases can be eliminated in real time even when the changing rules of biases are unknown. However, the mean-shift registration in the literature (Qi et al., Reference Qi, Jing, Hu and Zhao2008) can only eliminate approximately 60% of the relative systematic errors when the changing rules of systematic errors are required to be known. Compared with mean-shift registration in the literature (Qi et al., Reference Qi, Jing, Hu and Zhao2008), the algorithm in this paper has strong adaptability, better real-time performance as well as more conciseness, which all contribute to higher engineering application value. It can be applied to the relative registration between multiple radars on a single ship and also to the relative registration between fixed platform radars that are not far apart.
 Pan Jianghuai (1982.10-) was born in Gao'an, Jiangxi Province, China. He graduated from Wuhan University with a bachelor's degree in 2004. In 2007, he graduated from Jiangsu Automation Research Institute of China Academy of Ships with a master's degree. He is now studying for his PhD in Nanjing University of Aeronautics and Astronautics. He has won 2 first prizes and 1 second prize at provincial and ministerial level. He has published 1 monograph, 9 patents and 21 papers. In 2014, he was employed as a senior engineer. His research directions include short-range anti-missile, manoeuvring target tracking, information fusion, spatial registration, etc.
Pan Jianghuai (1982.10-) was born in Gao'an, Jiangxi Province, China. He graduated from Wuhan University with a bachelor's degree in 2004. In 2007, he graduated from Jiangsu Automation Research Institute of China Academy of Ships with a master's degree. He is now studying for his PhD in Nanjing University of Aeronautics and Astronautics. He has won 2 first prizes and 1 second prize at provincial and ministerial level. He has published 1 monograph, 9 patents and 21 papers. In 2014, he was employed as a senior engineer. His research directions include short-range anti-missile, manoeuvring target tracking, information fusion, spatial registration, etc.






 Open access
Open access