

1. Introduction
Reports and analysis of marine accidents (EMSA, 2019; DMAIB, 2020; JTSB, 2020; MAIB, 2020; MSIU, 2020; SHK, 2020) point to collisions as being the most common cause of navigational casualties, and to human erroneous actions as the primary accidental events. According to a review of the literature on collision avoidance methods (Huang et al., Reference Huang, Chen, Chen, Negenborn and van Gelder2020), two main approaches are used in technologies for reducing the risk due to human factors:
1. techniques to assist on-board officers in charge of the navigational watch (OONWs), and
2. development of autonomous systems to eliminate human factors, by automating some of the operation or control tasks, depending on the different degrees of autonomy (IMO, 2018).
Among the main contributing human errors in ship collisions that have been reported (Sotiralis et al., Reference Sotiralis, Ventikos, Hamann, Golyshev and Teixeira2016; Ung, Reference Ung2019; Weng et al., Reference Weng, Yang, Chai and Fu2019; Yıldırım et al., Reference Yıldırım, Başar and Uğurlu2019) are: errors in supervision (not keeping appropriate lookout, failure to take early actions), misinterpretation of COLREGs (IMO, 1972) and poor/lack of communication between the vessels’ OONWs. Communication failures are mainly related to ambiguities, misunderstandings, unsuitable devices and absence of closed-loop communication (Boström, Reference Boström2020) to provide feedback on messages. Very high frequency radio (VHF) has been the only communication medium for many years and its misuse is a contributing factor in a significant number of casualties (MCA, 2016).
Whether under manual or automatic control, vessels involved in an encounter will face less risk if they reach an agreement (explicit or not) on the manoeuvres needed to avoid the hazardous situation. Regulations for decision making, COLREGs, have been designed to determine these manoeuvres without requiring any communication between the vessels. But, on the other hand, safe navigation demands the use of all available means to obtain optimum situational awareness (Tsimplis and Papadas, Reference Tsimplis and Papadas2019), as stated in COLREG Rule 5.
Given that lack of communication between ships and violations of COLREGs, as already mentioned, occur frequently in collision cases, it seems necessary to reconsider the premise of non-communication. Some authors propose distributed calculations, assuming an inter-ship communication, with ships broadcasting (Zhang et al., Reference Zhang, Zhang, Yan, Haugen and Guedes Soares2015) or negotiating (Kim et al., Reference Kim, Hirayama and Okimoto2017) their manoeuvring intentions.
A new approach that aimed to increase the OONW's ability to monitor and handle hazardous situations, in line with Safety II perspective (Hollnagel et al., Reference Hollnagel, Leonhardt, Licu and Shorrock2013) in which ‘humans are seen as a resource necessary for system flexibility and resilience’, was introduced by Argüelles et al. (Reference Argüelles, Maza and Martín2019). The aim of the suggested system is to reduce the risk of collision from the above factors by helping the OONWs to take early and correct actions in accordance with COLREGs and improving the communication between them.
The application of these measures would consist of a system integrated on the bridge, in charge of detecting the dangerous situation, determining the actions and informing the OONW so that they can control the manoeuvres more safely, in compliance with the COLREGs and without conflict with the other vessel. Similar measures could also be applied to unmanned vessels. In that case, the safety instrumented system would be responsible for detecting, calculating and transmitting the reference signals of the manoeuvres to be carried out to the ship's movement control system.
The most innovative characteristic of the proposed safety system is that the decision on collision avoidance manoeuvres is not taken in isolation by each ship, but after comparing the information that the ships involved have about the situation. The strategy is simple: would it not be better and more reliable if, where possible, a vessel had the same information that the vessel with which she is in a close-quarters situation uses to make a decision, rather than having to ‘guess’ the other vessels’ intentions? The aim would be to implement communicative encounters, understood as those in which each vessel makes information available to the other to assist in correct decision making in the event of collision risk.
The system's intended functionality can be summarised as follows. When the system installed on a ship detects a risk of collision or close-quarters situation with another ship, it will perform the following tasks, in order:
• Identify the COLREG rules to be applied depending on the scenario and the situation.
• Identify possible manoeuvres for a safe passage.
• Warn its OONW.
• Communicate with the system at the target, to inform and reach agreements for manoeuvring between both OONWs.
The implementation of this system entails the identification of all possible close-quarters situations, scenarios and navigational statuses in a vessel encounter, and the definition of unambiguous messages to inform the OONWs of the manoeuvres to be carried out, all in compliance with COLREGs.
This paper describes the defined inter-ship dialogue and communication messages, using a study case to illustrate the suitability of the prototype. Section 2 shows an analysis of vessel encounters, the corresponding manoeuvres inferred from COLREGs and the structure of the associated messages. In addition to considering the situations for ‘vessels in sight’ scenarios (head-on, overtaking and crossing), the analysis also includes the conduct of vessels in restricted visibility scenarios (Rule 19), since manoeuvres may differ. Section 3 outlines the main aspects concerning the implementation of the prototype. Section 4 presents an example of an encounter between two ships that may lead to disparate decisions and manoeuvres by their OONWs, and therefore with high risk of collision. Section 5 describes how the system would operate in this encounter and discusses the obtained results. Section 6 presents the main conclusions.
2. Analysis of vessel encounters and associated manoeuvres
One of the fundamental issues that this paper tries to avoid is the common oversimplification of COLREGs. It is a complex text, which generates uncertainties. We do not know whether it will be simplified or modified in the future, but we will start from the text in force today.
According to the visibility in the encounter area, COLREGs distinguish between three scenarios:
• Vessels in sight (COLREGs Section II),
• Vessels not in sight with radar (COLREGs Section III-19 d), and
• Vessel not in sight without radar (COLREGs Section III-19 e).
Any ship with a totally enclosed bridge must be equipped with a sound reception system. Although the inclusion and use of the information provided by such equipment could be considered, because of its simplicity (basically, only possible variations in bearings) and the fact that it is not compulsory for all ships, the authors decided to defer this scenario of detection only by sound signals (Rule 19 e) to later studies.
Due to constraints of word length, only navigation on the high seas is considered. Criteria and algorithms referring to geographical restrictions: narrow channels, traffic separation schemes, inshore traffic zones and traffic lanes, will be part of further work.
The first step in this analysis consists of identifying all the possible ship-to-ship approaches for each scenario, obtained from their relative positions and headings. Twenty-eight different encounters have been identified: 19 for vessels in sight scenarios and nine for vessels in restricted visibility scenarios. Each of these encounters will have an associated message to inform the OONWs of both vessels.
It should be noted that there is not a standardised language for collision avoidance in the International Maritime Organization (IMO) Standard Marine Communication Phrases (SMCP) (IMO, 2001). Even in the IMO Model Course 3⋅17 Maritime English, the importance of ‘understand and use vocabulary associated with COLREGs accurately’ is recognised, but without setting a standard phraseology. This is not logical, as the potential assistance that a VHF conversation could provide may be counter-productive if English is not adequately mastered (Sari and Sari, Reference Sari and Sari2020).
The authors believe that there is a need for standardisation of messages that simply and unambiguously inform OONWs of what is considered essential to reduce the risks of encounters:
(a) Identification of situation + scenario.
(b) COLREG Rule(s) to apply, including Rule 18, which, depending on the navigational status of the vessels, could alter the default priorities for manoeuvring.
(c) Information about the situation and, when appropriate, about own shipside (port, starboard) or beam (forward-ahead, abeam, abaft-astern) in the closest point of approach (CPA) with the target. In this paper, CPA will refer to the distance at the closest point of approach as defined for RADAR equipment (IMO, 2004).
(d) Prescribed conduct for the vessels (using text and/or images).
For this purpose, messages have been generated using pictograms and phrases that are in line with COLREGs. Figure 1 shows the basic symbols used for the representation of these situations and associated manoeuvres. Figure 2 outlines all the different encounters between two vessels (A, B) in a vessels in sight scenario and their expected conduct according to COLREGs, taking into account their passage priorities, obtained from their navigational status and responsibilities (Rule 18). Figure 3 outlines the encounters for vessels in restricted visibility scenarios. Phrases and expressions used in the messages are mainly taken from COLREGs. Table 1 shows the text of some of the defined messages.
Basic symbols used in pictograms

Situations and manoeuvres for ‘vessels in sight’ scenarios (COLREGs Section II)

Situations and proposed manoeuvres for ‘vessels not in sight with radar’ scenarios

Text associated with some of the defined messages

3. Characteristics of the safety related system
The programmable electronic system that implements the safety functions for collision avoidance (conflict detection and resolution) is responsible for data acquisition, processing and communication on each ship. A programmable logic controller (PLC) receives from an automatic identification system (AIS) static and dynamic information about own ship and nearby targets. It uses the AIS as a communications channel to send and receive messages to/from the PLCs of the other ships, through addressed binary messages and acknowledgements (ACKs). Figure 4 represents its structure.
Diagram of programmable electronic system
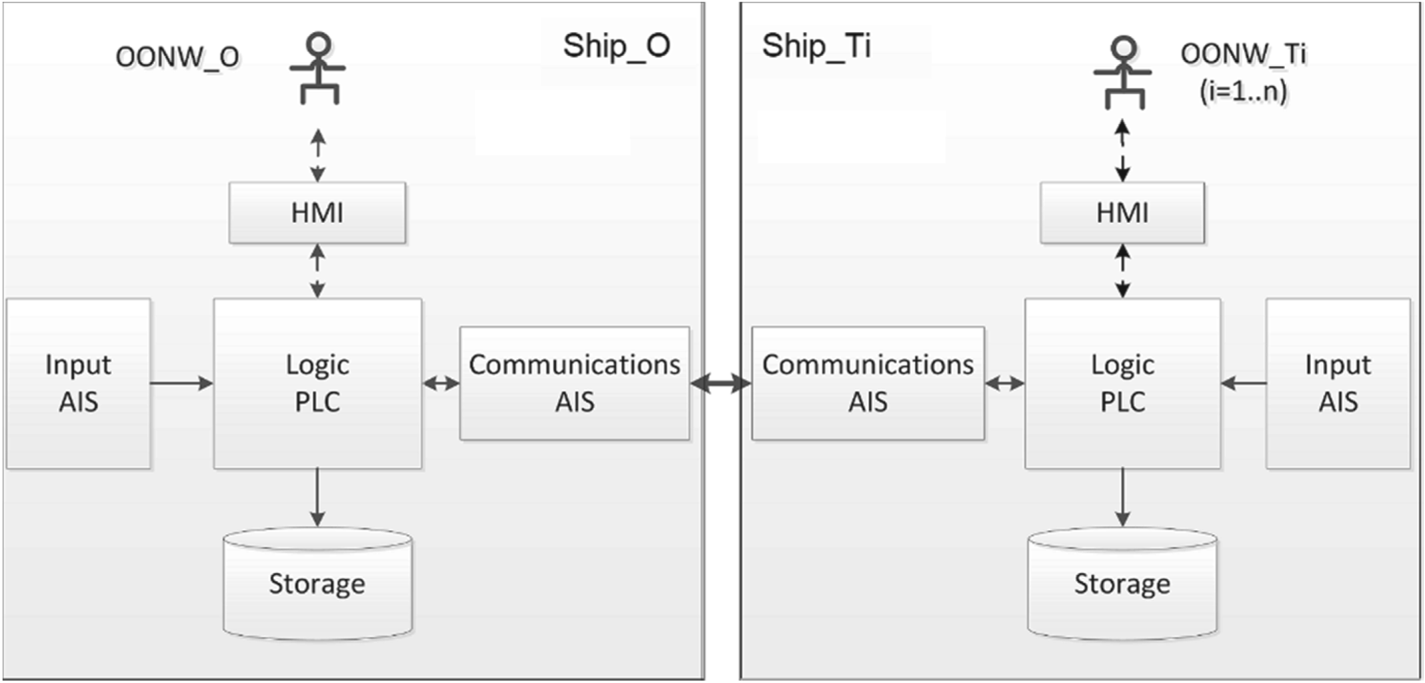
3.1 Brief outline of the programmable electronic system
It was decided to use a PLC as the core of the system. The main reasons for using PLCs are: their real-time mode of operation, the availability of input and output interfaces for all process signals and for communications with other devices, and their robustness.
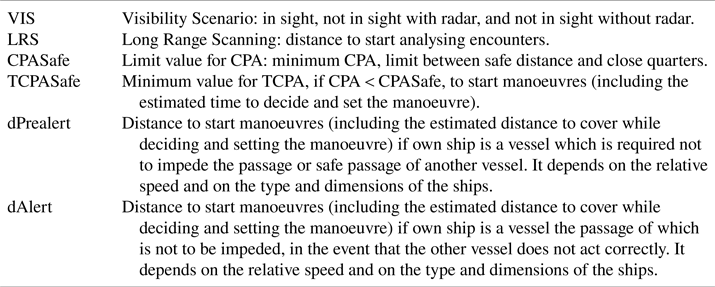
For correct functionality, the PLC requires some information from the OONW/System regarding several ship/scenario criteria, defined in Table 2. Those parameters will determine the following logical terms:
• Safe distance: CPA ≥ CPASafe.
• Close quarters/risk of collision: CPA < CPASafe.
• Prealert: CPA < CPASafe and ([distance ≤ dPrealert] or [TCPA < TCPASafe]).
Required parameters
Once the information has been obtained, each PLC will, cyclically:
(a) Receive from the AIS the static information (identification, name, type of vessel, dimensions) and dynamic information (latitude, longitude, heading [H], speed over ground [SOG], rate of turn [ROT], navigational status) of own and nearby vessels, and the transmitted binary messages.
(b) Perform the calculations of distance (d), bearing (B), relative speed (SR), relative course (CR), CPA and TCPA .
(c) Determine if there is a close-quarters situation in each ship-to-ship encounter, and the actions to be taken by both ships.
(d) In case of prealert:
• Communicate the data and the calculated rules to apply to the OONW and wait for his/her response.
• Exchange messages with the PLC of the target ship.
• Send the calculated information to check if there is agreement in the data handled by both PLCs, and wait for the target PLC's answer. If there are differences between the data they handle, each PLC will warn its operator.
• If there is agreement on the previous point, the PLC sends the calculated manoeuvre to the target PLC and waits for it to inform its operator and his/her response.
(a) Inform OONWs of agreements, possible disagreements, delays, communication failures, etc.
(b) Inform OONWs about possible manoeuvres to achieve safe distance.
(c) Store all relevant information for future reference.
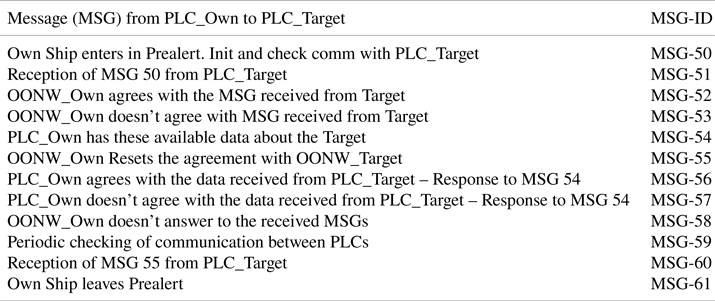
A group of messages (see Table 3) is used to initiate or confirm the communication between the PLCs of own and target ships (PLC_Own and PLC_Target), to check the correspondence between their data and to inform the OONWs about agreements or disagreements.
Check and confirmation messages
3.2 Manoeuvring calculations for collision avoidance
In case of prealert with a target, besides showing the OONW the information on the encounter and the messages according to COLREGs, the system will calculate and inform the OONW about ranges of course or speed for which CPA ≥ CPASafe, as an aid to determine the manoeuvre to perform. Table 4 shows the initial data for an illustrative example that will be used in the study case. Target positions (latitude [lat], longitude [on]) are in miles relative to own ship.
Initial data for own and target ships

The example is an overtaking situation in a vessels in sight scenario, with own ship overtaking target. According to Rule 13 of COLREGs, the overtaking vessel shall keep out the way of the vessel being overtaken, if there are no other impediments or priorities.
A CPASafe = 0⋅5 miles is set. The relative courses (CR1 and CR2) at this distance to achieve the safe CPA are shown in Figure 5 (lengths not proportional to distance).
Relative courses, for CPASafe = 0⋅5 miles

Figure 6 represents the polar chart (R, Theta) with velocity vectors (SO, HO), (ST, HT) and relative courses CR1 and CR2. SOMax and SOMin are the maximum and minimum speeds for own ship. The shaded area corresponds to the values of the velocity vector (SO, HO) for which CPA < CPASafe, assuming the target is a stand-on ship. It is called the velocity obstacle (VO) area (Fiorini and Shiller, Reference Fiorini and Shiller1998). To pass at a safe distance by alteration of course alone, the selected heading must be out of the arc limited by HO1 and HO2. Similarly, manoeuvring only by altering the speed will require that (SO > SO2) or (SO < SO1). Taking into account the dynamic characteristics of the ship (manoeuvrability parameters), the relative speed and the distance to the target, relative courses are recalculated, increasing the VO area.
Polar chart with VO area for own ship velocity vectors: (a) current velocity vectors and relative courses bounding the unsafe CPA; (b) limit values for own ship heading and speed; (c) real-time polar graph

A real-time graph similar to Figure 6(c) will be displayed. Own ship OONW can move the cursor over the chart, to select R(SO) and Theta(HO) values for a safe manoeuvre.
4. A case study
All marine accident reports include a synopsis, factual information, analysis, conclusions and recommendations. The conclusions give a resumé of the probable causes of the accident. Frequent alleged causes for ship collisions are wrong decisions or lack of early actions by OONW and failures or misunderstandings in communications between OONWs.
One of the most striking cases is related to the boundary between overtaking and crossing situations, which can create errors of appreciation and incorrect application of COLREGs, as in one of the examples from the reports (MAIB, 2005). The legal outcome of a collision between two bulk carriers in Singapore waters (SGHC, 2017) has particularly caught the authors’ attention.
Differences in the assessment of the situation can also result in a discrepancy regarding the responsibilities of the vessels. This special situation is a case to illustrate the functionality and applicability of the system.
The situation shown in Figure 7, equivalent to the example in the previous section, is used as the study case. If both ships continue with uniform movement, at a distance of 1⋅8 miles the situation becomes crossing, with SHIP-ONE on the starboard side of SHIP-TWO.
Overtaking situation, vessels in sight (lengths not proportional to distance)
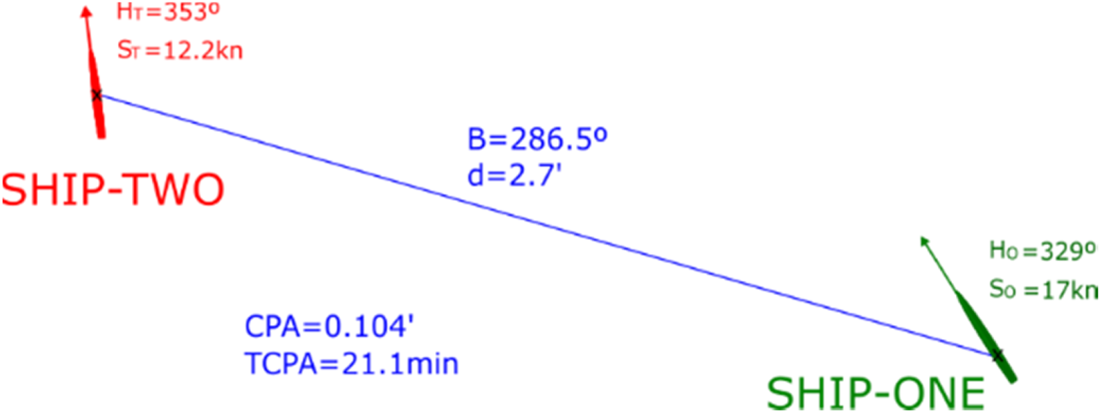
Let us suppose that the OOWNs of both ships have set a CPASafe of 0⋅5 miles. Both should apply COLREGs since there is a risk of collision (CPA < CPASafe). When do the OONWs react and start applying the rules? Different possibilities are analysed, assuming a correct interpretation of COLREGs:
• Both OONWs react when the distance between the ships is greater than 1⋅8 miles (dPrealert >1⋅8). Both perform the calculations and determine that SHIP-ONE is overtaking SHIP-TWO, in a vessels in sight scenario. Applying Rule 13, SHIP-ONE must manoeuvre to keep out of the way of SHIP-TWO, which does not have to manoeuvre, in a first moment.
• Both OONWs have dPrealert <1⋅8 miles. Both perform the calculations and determine that they are in a crossing situation, SHIP-ONE on the starboard side of SHIP-TWO, in a vessels in sight scenario (Rule 15). SHIP-TWO must keep out of the way and avoid crossing ahead of SHIP-ONE, which does not have to manoeuvre, in a first moment.
• As it is not defined when (at what distance or how long in advance) operators have to react, let us suppose that dPrealert >1⋅8 miles for SHIP-TWO and dPrealert <1⋅8 miles for SHIP-ONE. SHIP-TWO OONW does not start a manoeuvre since he/she deduces (correctly) that Rule 13 has to be applied and that SHIP-ONE has to manoeuvre. And SHIP-ONE OONW does not start a manoeuvre since he/she deduces (also correctly) that Rule 15 must be applied, so that SHIP-TWO should manoeuvre, as in the Singapore case. Consequently neither ship manoeuvres and the distance between them keeps decreasing until, at best, an OONW realises that they are too close and is forced to manoeuvre, according to Rule 17, Action by stand-on vessel.
• Finally, if dPrealert >1⋅8 miles for SHIP-ONE and dPrealert <1⋅8 miles for SHIP-TWO, then SHIP-ONE OONW should manoeuvre in advance, as SHIP-ONE is overtaking SHIP-TWO. If this manoeuvre is not initiated or apparent before SHIP_TWO enters in prealert and identifies that they are in a crossing situation, however, both ships could turn to starboard, increasing the risk of the situation.
• In real conditions, the calculated boundary between overtaking distance and crossing distance may vary slightly. Near that distance both operators may have reacted at the same time, may have performed the calculations correctly and may have inferred different situations and therefore apply different COLREG rules. Anyway, SHIP-ONE OONW should keep in mind Rule 13 (c): ‘when a vessel is in any doubt as to whether she is overtaking another, she shall assume that this is the case and act accordingly’.
If a vessels in restricted visibility scenario is also considered, there will be more combinations of reactions from operators, thus increasing the risk of collision. The number of conflicting reactions increases further when adding the cases where there is not agreement about the visibility.
The foregoing considerations, assuming proper interpretations of COLREGs and correct calculations that nevertheless result in faulty manoeuvres, could be extrapolated to possible implementations for autonomous vessels, with the risk that this entails. Even by communicating a disagreement with the other ship's diagnosis, to know it gives a degree of certainty that is not otherwise achieved.
To these considerations should be added those cases in which, for reasons of misinterpretation of COLREGs or faulty calculations, an OONW takes erroneous manoeuvring decisions that could be highlighted by the other vessel's comments.
5. System performance: results and discussion
This section shows the results of applying the implemented prototype of the system to the described example case. Initial given values are displayed in Table 5. SHIP-ONE uses PLC1 and AIS1; SHIP-TWO PLC2 and AIS2.
Initial data
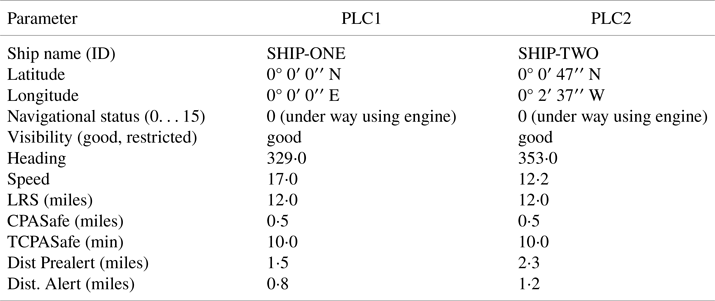
Figure 8 includes information visualised by each OOWN, with the calculated data in PLC1 (left) and PLC2 (right) before detecting a prealert situation. The calculated CPA is less than CPASafe for both ships. From the initial data, SHIP-ONE will enter in prealert when (distance ≤ 1⋅5) or (TCPA ≤ 10⋅0). For SHIP-TWO, the selected distance for prealert is 2⋅3 miles. At that distance, as shown in Figure 9, vessels are in an overtaking situation (SHIP-ONE overtaking SHIP-TWO).
Received and calculated data in each PLC, before prealerts

Received and calculated data, SHIP-TWO in prealert
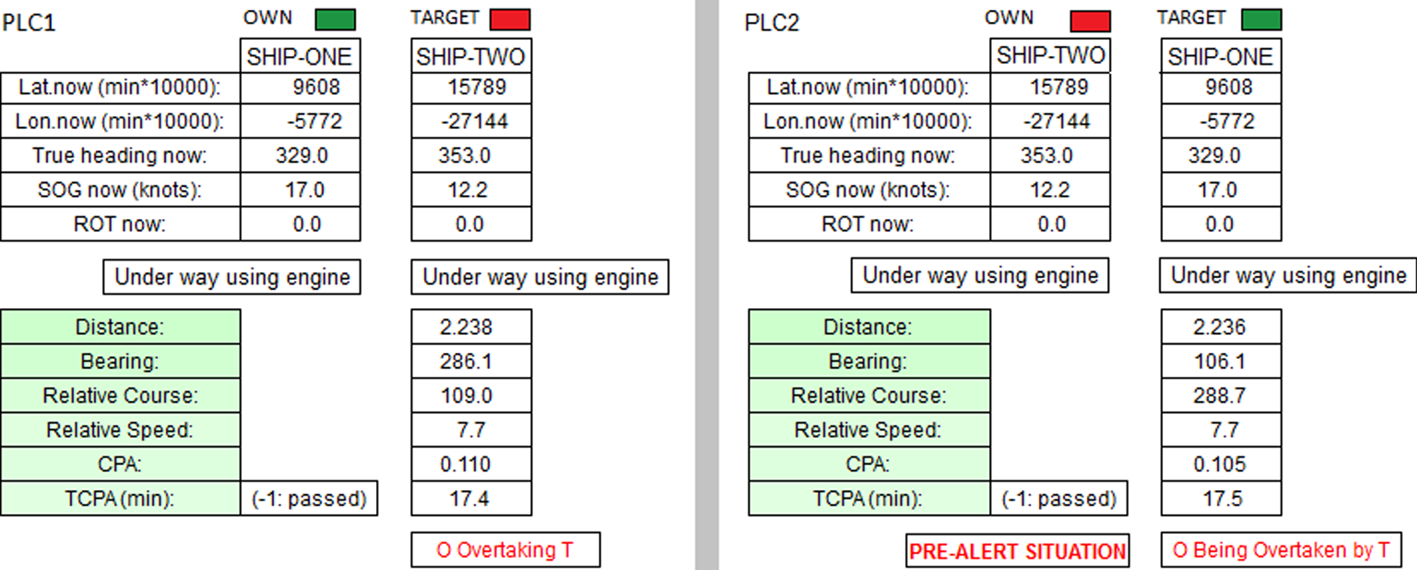
Figure 10 represents the sequence of messages between the systems. When PLC2 detects prealert, it shows its operator the information about the encounter. If the operator agrees, PLC2 sends PLC1 the message MSG-50 (see Table 3) to start the dialogue, it waits for the reception of MSG-51 and then it sends to PLC1 the message with the associated dynamic information (MSG-54). PLC1 checks the matching with its data. If they match, PLC1 sends MSG-56 and then PLC2 sends MSG-3 (see Table 1), with the information for the agreement, and advises its operator that it is waiting for an answer from SHIP-ONE's OONW. PLC1 displays the received information, and if the operator agrees, both PLCs inform about the agreement. MSG-50, MSG-51, MSG-52, MSG-54, MSG-56 and MSG-3 are sent by means of addressed binary AIS messages (AISMSG6). The AIS that receives an addressed binary message acknowledges it by sending back an ACK (AISMSG7). The waiting time for the reply to any message is limited. In case of delay, the PLC alerts its operator.
Sequence of messages, in case of agreement between OONWs
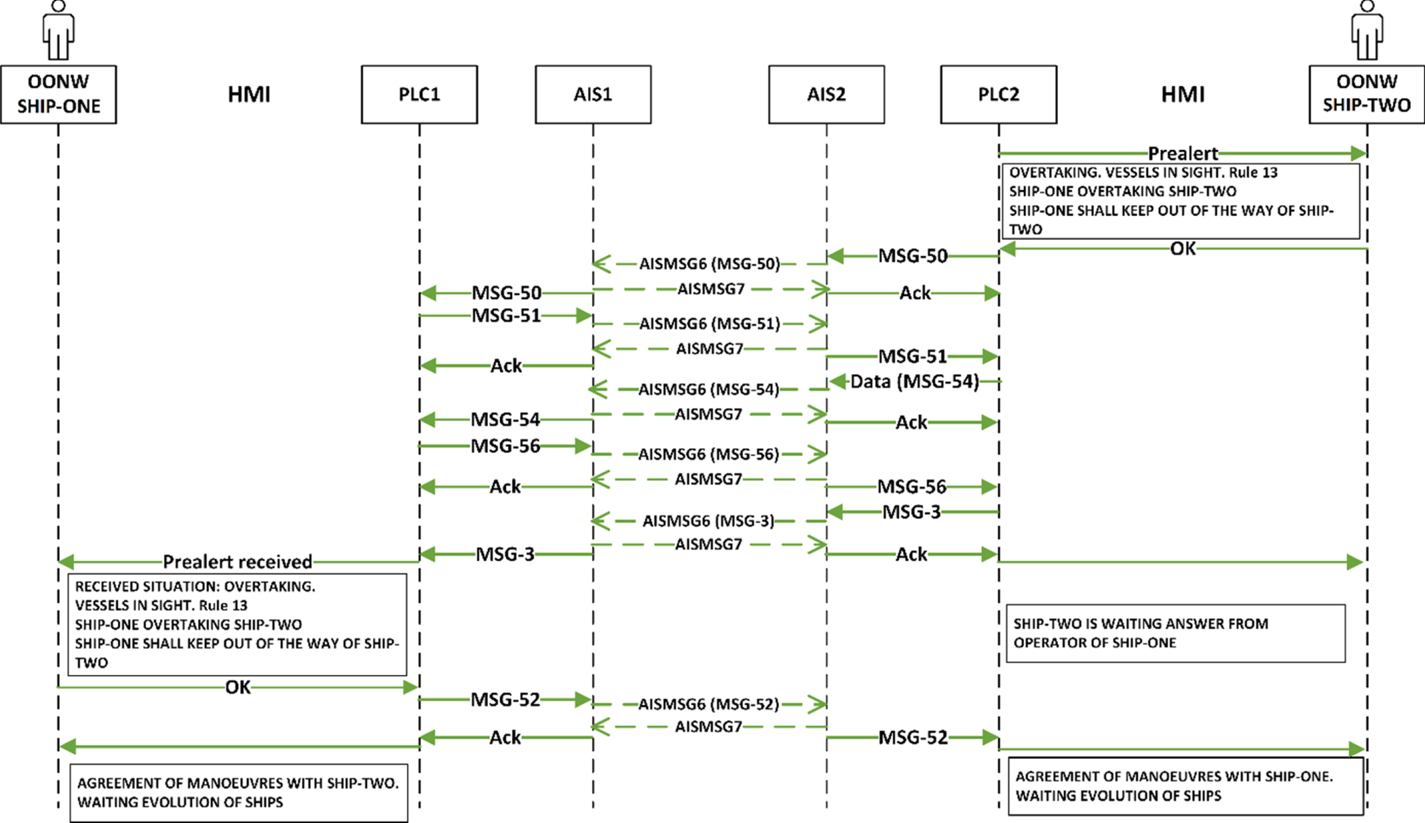
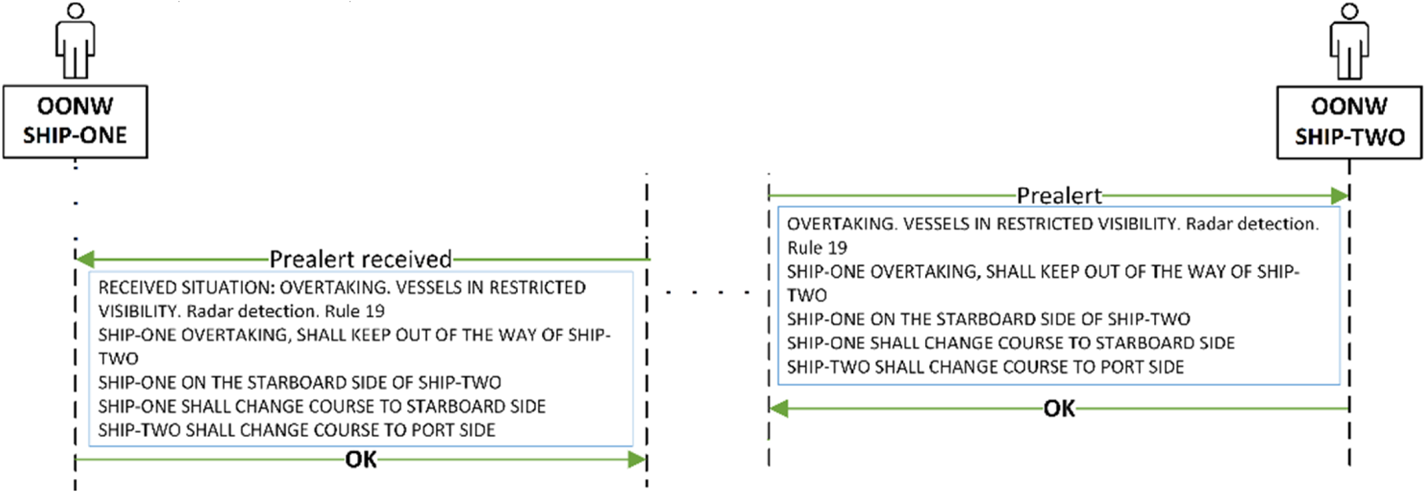
Figure 11 illustrates the prealert messages sent to the OONWs, as in Figure 10, but in a restricted visibility scenario (MSG-26).
Prealert messages, restricted visibility
The situation turns into crossing when distance <1⋅8 miles. As SHIP-TWO is already in prealert at this distance, she maintains the overtaking situation (in which the prealert has been generated), in compliance with COLREG Rule 13 d: ‘Any subsequent alteration of the bearing between the two vessels shall not make the overtaking vessel a crossing vessel within the meaning of these Rules or relieve her of the duty of keeping clear of the overtaken vessel until she is finally past and clear.’
As SHIP-ONE is not yet in prealert (her dPrealert = 1⋅5 miles), her system recognises the crossing situation. If distance <1⋅8 miles when SHIP-TWO sends to SHIP-ONE the manoeuvring message, the situations are those given in Figure 12.
Received and calculated data, discrepancies

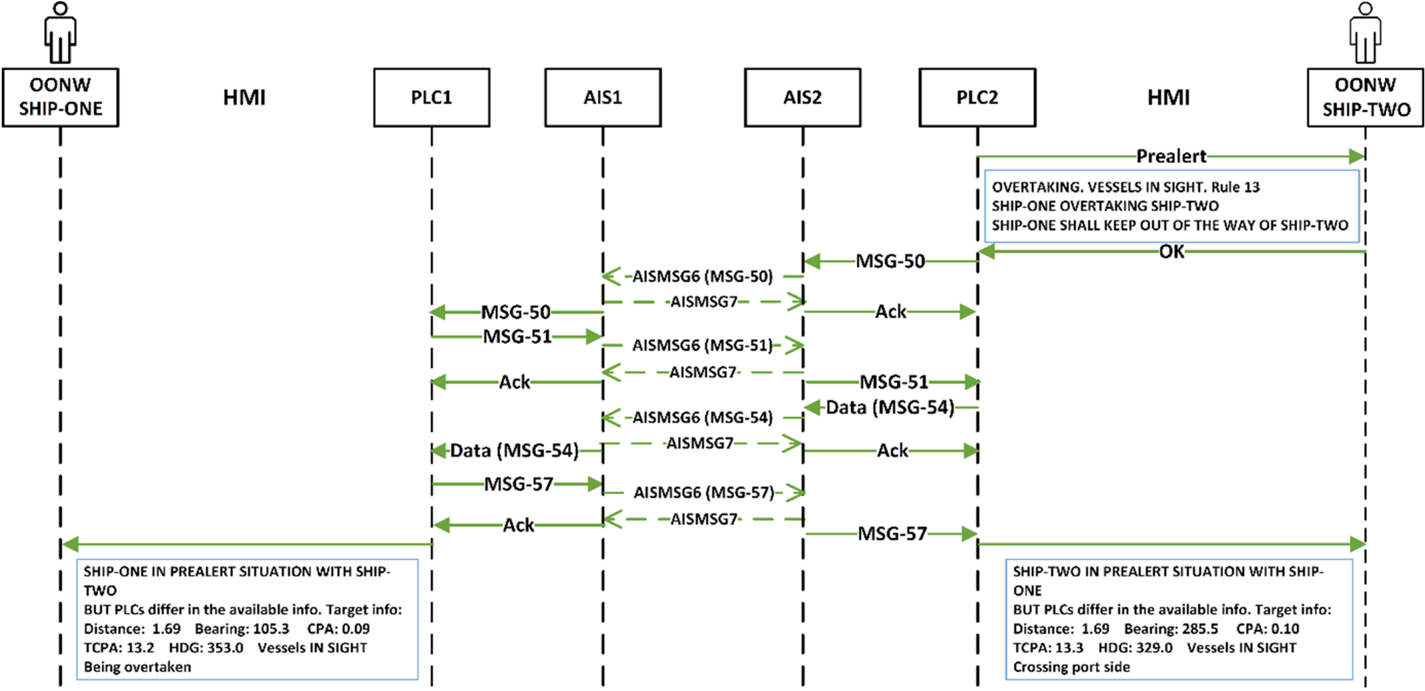
The sequence of messages, if SHIP-TWO OONW agrees with the warning of prealert from PLC2, is shown in Figure 13. PLC1 detects differences in the received data (in MSG-54) with respect to its own data, and warns its operator. So, SHIP-ONE OONW sees that SHIP-TWO has detected a ‘being overtaken’ situation. In addition, PLC1 sends to PLC2 the message with the dynamic information available in SHIP-ONE, and SHIP-TWO OONW also sees the difference. Discrepancies in numerical values (distance, CPA, etc.) are allowed within predefined tolerance ranges.
Sequence of messages, in case of data discrepancies between PLCs
Finally, let us assume that the prealert distance defined for SHIP-TWO (1⋅2 miles) is less than that given for SHIP-ONE (1⋅5 miles). In this case, PLC1 first detects the prealert situation, warns its operator and then the corresponding exchange of messages will take place. Both systems recognise a crossing situation, with SHIP-ONE crossing ahead on the starboard side of SHIP-TWO. The sequence of messages is shown in Figure 14.
Sequence of messages, dPrealert = 1⋅5 miles

All the sent or received messages and their associated dynamic data, with date and time, will be stored by each PLC in an external database, for further consultation.
The final implementation of this system will require ships to be equipped with a PLC and an AIS, for data acquisition and communication of messages for agreements between the OONWs. Although the availability and reliability of AIS data has been improving over time (Tu et al., Reference Tu, Zhang, Rachmawati, Rajabally and Huang2018), its use can be combined with other equipment for data input. These data would be redundant with those from AIS and could be used to improve the availability and integrity of dynamic information (Last et al., Reference Last, Bahlke, Hering-Bertram and Linsen2014; Felski et al., Reference Felski, Jaskólski and Banyś2015), and hence the reliability of the model.
A common criterion in the assignation of values for CPASafe, TCPASafe, LRS (long range scanning), dPrealert and dAlert, and their dependence on the type of vessels and relative speeds must be established. It is also necessary to define the allowed tolerance for the acquired dynamic values.
With the dynamic information provided by the AIS, the developed system has enough data to be able to apply COLREG Section II rules, corresponding to vessels in sight. However, for vessels in restricted visibility, Section III must be applied. In this case, current COLREGs only consider explicitly the information provided by the radar or by sound signals for the detection of another vessel. If this rule is not modified, the decision about the manoeuvre based on the information obtained from the AIS could be questioned. Nevertheless, the use of AIS as the source of information made in this work is supported by IMO Resolution A.1106 (IMO, 2015), COLREG Rule 5 and legal interpretations, e.g., the Western Neptune and St Louis Express collision (Tsimplis and Papadas, Reference Tsimplis and Papadas2019).
In this model input from the OONWs is necessary, indicating whether they are in a vessel in sight or not in sight scenario, in order to apply the rules of Section II or Section III. The overtaking situation of vessels in restricted visibility is identified in rule 19 d: ‘the following shall be avoided: (i) an alteration of course to port for a vessel forward of the beam, other than for a vessel being overtaken’. COLREGs do not define what to do in this case.
This model proposes the following:
• In an overtaking situation with restricted visibility, both vessels have to manoeuvre. The overtaking vessel must manoeuvre to the opposite side by which she is overtaking. The other vessel, to the opposite side by which she is being overtaken. See, as an example, Table 1, MSG-22.
• For the rest of situations in restricted visibility with radar detection, the system determines what alteration of course each ship should avoid, as shown in Table 1, MSG-26.
In each agreement, the OONWs of both vessels agree, or not, on the following:
(a) Time to start actions to avoid collision.
(b) Scenario in which they are: vessels in sight or vessels in restricted visibility with radar.
(c) Situation, depending on the scenario.
(d) Rule to apply, including the alternative dependent on the navigational status.
The agreement does not quantify the manoeuvre, that is, values for heading or speed that should be ordered if there is a close-quarters situation or risk of collision exists are not included in the inter-ship messages. It is assumed that the calculation of the manoeuvre is the mission of the OONW. Anyway, the system provides each operator with heading and speed values for which CPA ≥ CPASafe. They can select between different options to visualise the VO areas:
– all targets in their LRS,
– only a particular target,
– targets for which there is a prealert situation,
– stand-on targets.
Figure 15 shows an example, with an additional target.
Chart display with two targets

From these manoeuvring data, the visualisation of the COLREG rules to apply, and the information about the agreement (or disagreement) with the target, the OONW can decide the most suitable manoeuvre. A new binary message could be defined to broadcast, by using AIS MSG 8, the selected manoeuvre.
A simple human–machine interface (HMI) was used in the tests. Possible HMI formats are being analysed, to facilitate the OONW tasks without increasing the risk of human error (EU-OSHA, 2009; Szlapczynski and Szlapczynska, Reference Szlapczynski and Szlapczynska2015; Pietrzykowski et al., Reference Pietrzykowski, Wołejsza and Borkowski2017; Ramos et al., Reference Ramos, Utne and Mosleh2019). The HMI must include an audible signal to warn the OONW about the reception of any AIS binary message.
For a critical encounter, this communication system informs the involved ships about the Prealert and Alert distances (dPrealert, dAlert) of both. This could avoid high-risk situations, such as those that can occur in a critical encounter between ships of different sizes, in which a large ship, with large dPrealert and dAlert values and still having priority of passage, would have the need to manoeuvre a small ship if dPrealert of the small ship is lower than dAlert of the big one. (Rule 17, Action by stand-on vessel).
6. Conclusion
Ship encounters that may generate a critical situation should be dealt with according to the COLREGs. These rules, in most cases, are presented as good, effective and understandable references. Manoeuvres carried out according to COLREGs are what is known as good seamanship. Nevertheless, it may happen that the interpretation of the rules by the OONWs in charge of encountering vessels is not homogeneous, which can lead to catastrophic results.
The model presented in this paper can act as an available means for a ship to maintain a proper lookout, and provides an appraisal of the situation and of the risk of collision, in support of COLREG Rule 5. The system offers a solution using common on-board equipment along with other easily accessible electronic programmable devices. The defined unambiguous and standardisable messages and pictograms mean that problems derived from miscommunication between OONWs due to lack of common language or limited English skills would be avoided.
Even in special situations, such as the shown study case, the system allows each of those involved in the situation to be informed about the intentions and characteristics of the other, in particular about the safe and prealert distances for each ship. The messages, accompanied by audible signals, warn the OONWs, an essential feature to prevent lookout errors. It will thus be easy to agree on the manoeuvres to be carried out. In case of disagreement, better knowledge of the facts will allow the consequent adoption of other collision prevention measures.





















 Open access
Open access