


Nomenclature
- MRO
-
maintenance, repair and overhaul
- NDT
-
non-destructive testing
- OEM
-
original equipment manufacturers
- IT
-
information technology
- AI
-
Artificial Intelligence
- I4.0
-
Industry 4.0
- IoT
-
Internet of Things
- ML
-
machine learning
- CAA
-
Civil Aviation Authority
- AMOS
-
aircraft maintenance and operations system
- I5.0
-
Industry 5.0
- EC
-
European Commission
- WLI
-
white light interferometry
- MDP
-
maintenance planning data
- UWB
-
ultra-wideband
- RFID
-
radio-frequency identification
- ANDI
-
automated non-destructive inspector
- CIMP
-
crown inspection mobile platform
- MORFI
-
mobile robot for fuselage inspection
- CFRP
-
carbon fibre-reinforced plastics
- DL
-
deep learning
- CNN
-
convolutional neural networks
- Mask
-
RCNN mask region-based CNN
- YOLO
-
you only look once
- ICAO
-
International Civil Aviation Organization
- NOTAM
-
notice to airmen
- FAA
-
Federal Aviation Administration
- API
-
application programming interfaces
- GSE
-
ground support equipment
- CCTV
-
closed-circuit television
- SLAM
-
simultaneous localisation and mapping
- FastSLAM
-
Rao-Blackwellized particle filter
- GPS
-
global position system
- IMU
-
inertial measurement unit
- RTK-GNSS
-
real-time kinematics global navigation satellite system
- DBSCAN
-
density-based spatial clustering of applications with noise
- RRT
-
rapidly exploring random trees
- DWA
-
dynamic windows approach
- ArUco
-
augmented reality University of Cordoba
- RGB
-
red green blue
- RGB-D
-
red green blue-depth
- ROS
-
robot operating system
- GNSS
-
global navigation satellite system
- LiDAR
-
light detection and ranging
- ANFIS
-
adaptive-network-based fuzzy inference system
- EKF
-
extended Kalman filter
- RMSE
-
root mean square error
- BPNN
-
backpropagation neural network
- BIM
-
building information modelling
- LOS
-
line of sight
- V2X
-
vehicle to everything
- V2V
-
vehicle to vehicle
- V2N
-
vehicle to network
- V2I
-
vehicle to infrastructure
- SL
-
side link
- 5G
-
NR 5G new radio
- 5G NR URLLC
-
5G NR ultra reliable and low latency communications
- WiFi
-
wireless fidelity
- AP
-
access points
- RSS
-
received signal strength
- DARTeC
-
Digital Aviation Research and Technology Centre
- SR-LS
-
squared range least square
- RTAB-Map
-
real-time appearance-based mapping
- VO
-
visual odometry
- RTS
-
robotic total station
- IPS
-
internal positioning system
- AMCL
-
adaptive Monte Carlo localisation
- QR
-
quick response
- PAUT
-
phased array ultrasonic testing
- DFF-NN
-
deep feed forward neural network
- HMI
-
human-machine interfaces
- GUI
-
graphical user interfaces
- TSN
-
time-sensitive networking
- IEEE
-
Institute of Electrical and Electronics Engineers
- IEC
-
International Electrotechnical Commission
- EASA
-
European Union Aviation Safety Agency
- IATA
-
International Air Transport Association
- RTCA
-
Radio Technical Committee for Aeronautics
- OT
-
operation technology
- NIS
-
network and information security
- TOPS
-
tera operations per second
- SMS
-
safety-management-system
- FPS
-
frames per second
- mAP
-
mean average precision
- FOD
-
foreign object debris
1.0 Introduction
Aircraft maintenance is a critical component of aviation, both in terms of safety and operational efficiency. As the aviation industry continues to evolve, there is an increasing need for innovative approaches to aircraft inspection and maintenance processes. The vision of Industry 4.0 – and its human-centric successor Industry 5.0 – places data, connectivity and collaborative robotics at the heart of this transformation, promising a step change in the way maintenance is planned, executed, and certified [Reference Yang and Gu1–Reference Ghobakhloo8].
The COVID-19 restrictions starkly exposed the fragility of the global maintenance, repair and overhaul (MRO) workforce. Sector revenues fell by 35% in 2020, and staff levels decreased by up to 89% in Western Europe [Reference Costanza and Prentice9–11]. Although forecasts indicate steady 2.9% compound annual growth to 2033 [Reference Brian12] (Fig. 1), the retirement of experienced technicians and the difficulties of attracting new talent continue to constrain capacity.
Automation, therefore, moves from a nice-to-have to a strategic necessity. However, adoption remains slow. Stringent airworthiness regulation demands exhaustive validation of every new process, and smaller MROs struggle with the capital outlay for robotic systems [13, Reference Poonian14]. Many inspections still rely on maintenance engineers’ experience-based skills; legacy IT and paper task cards hinder seamless data flow, and technicians may resist technologies perceived as threatening job security [15–17].
In parallel, aircraft are evolving into sensor-rich ‘digital assets’ that feed advanced health management systems such as the one described in the Conscious Aircraft paradigm [Reference Ezhilarasu, Angus and Jennions18] (Fig. 2). Using those data streams inside a smart hangar enables predictive maintenance, dynamic workpackage generation and real-time optimisation of ground support equipment. When collaborative robots, drones and fixed non-destructive inspector (NDI) cells are integrated within that digital backbone, heavy maintenance inspections can be shortened from days to hours while human experts are firmly in the loop.
MRO market forecast growth for the period 2019–2033 (based on the data presented by B. Prentice et al. in Ref. (Reference Brian12)).

The conscious aircraft concept. Credits Cordelia M. Ezhilarasu, Ian Jennions and Jim Angus [Reference Ezhilarasu, Angus and Jennions18] (CC BY-NC-ND). (High-resolution image: https://images.app.goo.gl/EqwZKQBnjpGD9szAA)

This review explores the development of versatile, non-destructive robotic-based approaches for automated aircraft inspections, with a focus on leveraging emerging technologies in a smart hangar environment to improve the accuracy, reliability and efficiency of maintenance procedures. As a case of the suggested digital transformation, an example of a task in 1a-check is included that showcases how a manual inspection process currently in use, featuring task card samples and common man-hour statistics, can be transformed into a robotic-aided automated method.
The review examines the current state of aircraft maintenance practices, as well as the potential for technological advances to revolutionise the field. The manuscript comprehensively explores various aspects of automated aircraft evaluation, including robotic frameworks, navigational techniques, localisation systems and their implementation in the real world. Moreover, the next section suggests principles to consider when planning smart hangars to ensure that these environments are both conducive to robots and secure for human-robot interactions. For increased safety, the article introduces frameworks intended to ensure effective human-robot collaboration, while also exploring the possible integration of various system components to enable real-time functionality in the smart hangar environment. To our knowledge, no detailed study on these aspects has been conducted in the literature. Lastly, a short review of deep learning (DL) algorithms that are utilised in automated defect detection tasks is presented, analysing their performance compared to human performance in similar tasks.
2.0 Aircraft maintenance processes
In 1935, during the Second World War, pilot checklists were formally introduced. An early B-17 bomber flew without following a checklist. The aircraft attempted to fly with the controls still secured, climbed to 300 feet, then stalled and crashed, resulting in the loss of all crew members [Reference Dario19]. After that event, the preflight list was introduced Ensuring airworthiness and safety is of paramount importance in aircraft maintenance. To achieve that, scheduled maintenance of different types is performed, which takes place depending on some well-defined metrics. These metrics are relevant to the following parameters of aircraft usage: flight hours, flight cycles and calendar days [Reference Andrade20]. The formal definition of the flight cycle is one complete phase that starts with the take-off and ends with the landing. Based on the original equipment manufacturer (OEM) guidelines, following these metrics when the aircraft reaches the predefined threshold it is grounded and undergoes the corresponding check.
The most popular types of scheduled maintenance are the following:
-
• Pre-flight checks are performed by the pilot before every flight and involve a visual inspection of the exterior and interior components of the aircraft, checking fluid levels, testing systems and ensuring everything is in good working order.
-
• Line maintenance checks are routine checks performed every 24–60 flight hours, often overnight at the airport gate. They include inspection of the wheels, brakes, fluid levels and checking for visible damage.
-
• A-checks, also known as light maintenance, occur approximately every 400–600 flight hours or 200–300 flight cycles. The aircraft is taken to a hangar, and maintenance technicians perform detailed inspections, change filters, lubricate systems and check emergency equipment. A-checks take 6–24 hours for narrow-body jets.
-
• C-checks, also known as heavy maintenance visits, take place every 18–24 months. They involve a thorough inspection of the aircraft’s systems, components and structures. The interior of the cabin is removed, and detailed checks are performed on the load-bearing structures, control surfaces and the skin of the aircraft. C-checks can take 1–2 weeks and require thousands of hours of labour.
-
• D-checks are the most comprehensive checks and occur approximately every 6–10 years. They involve a thorough teardown inspection and overhaul of the aircraft, including disassembly of landing gear, inspection of control surfaces and repainting of the fuselage. D-checks can take 6–8 weeks.
In order to complete the picture, B-checks are also mentioned in the literature. However, in reality, B-checks have been largely phased out and incorporated into A-checks [21].
On the lightweight side of aircraft maintenance, A-checks include inspection and servicing of specific components in order to lower effort in daily inspections. The aim is to assess the airworthiness of the aircraft and ensure it is safe to continue. There are different types of A-checks depending on the degree of thoroughness of the examination of the aircraft parts. The most basic type is the 1A check, but there are also 2A, 3A, 4A and 6A, which can be characterised as intermediate checks. The 1A for Boeing 737-300/400/500 aircraft, according to the maintenance planning data (MPD) document, occurs every 90 days, 600 flying hours or 300 flight cycles. The MPD document review assigns 31 tasks for the 1A check, of which 24 are visual inspections. Table 1 includes some compatible tasks for robotic inspection. The estimated work times shown in the table correspond to the performance of individual check items and do not include the time to position work stands and equipment preparation. According to the MPD document, these standards are based on best judgement factors, the use of skilled personnel and the availability of tools and equipment. The hourly rate calculation for licenced aircraft engineers (B1 licence) in the UK was based on research on a relevant recruitment website [22]. The research has shown an annual salary range from £55,000 to £75,000 (approximately 40 hours per week).
Extract from Boeing’s maintenance planning data document showing the visual checks for the 1A-check

Another valuable source of information providing general guidance on various aspects related to civil aircraft, including MRO, maintenance, operation and relevant procedures, is CAP 562 [23]. The document, which describes civil aircraft airworthiness information and procedures, was issued by the UK Civil Aviation Authority (CAA).
The ATA iSpec 2,200 provides a structured framework [24] to organise technical data, which is essential for modern MRO operations. A key element of this standard is the aircraft zoning system, which categorises the aircraft into major zones, sub-major zones, and zones using a three-digit numbering method. This system enables accurate identification and localisation of components for maintenance tasks. Jong et al. [Reference Jong25] presented a pilot study on identifying aircraft parts that are exposed more frequently to damage, based on a questionnaire survey that was carried out asking for feedback from 40 professionals working in MRO. According to the responses received (Fig. 3), the door area (ATA Zone 800) was found to be the most frequently affected by damage, accounting for 57.5%. The upper surface of the wing (ATA Zone 500 or 600) was the second most cited area, at 17.5%. In a maintenance context, the impact damage responses were almost evenly distributed between the wing/flap region (ATA Zone 500 or 600) and the lower surface of the aircraft (ATA Zone 100), each representing 35%. The elevator (ATA Zone 300) was also mentioned by 19% of the respondents.
Illustration depicting the percentage of participants’ feedback regarding (a) the aircraft components that experience most of the impact damage (represented by dark grey shaded boxes) and (b) the locations on an aircraft that are most susceptible to damage from impact in a maintenance context (indicated by light grey shaded boxes). Credits C.M. Jong et al. [Reference Jong25] (CC-BY).

3.0 Robotic platforms for automated aircraft inspections
In this section, various robotic platforms explored in the literature are classified according to their mobility modality. By examining the respective sensing payloads, degrees of freedom and level of technology readiness, the functional envelope within which navigation and inspection strategies must operate is established.
3.1 Crawlers and surface-climbing robots
In 1986, Schultz [Reference Schultz26] discussed various concepts using robotic systems in aircraft maintenance, but did not present any implementations. While the emphasis was primarily on military operations, the ideas remain relevant as they outline the framework for possible refueling systems, damage repairs and more. In 1998, Siegel et al. published an article [Reference Alberts27] promoting robot-assisted aircraft inspection, presenting different platforms and skin defects (cracks and corrosion) detection algorithms. This was one of the first attempts to automate aircraft inspection, describing the three phases of the development of a platform, called automated non-destructive inspector (ANDI), for aircraft skin inspection, which started in 1991 at Carnegie Mellon University and performed its first inspection in 1994 on DC-9 aircraft [Reference Siegel, Kaufman and Alberts28] (Fig. 4). The platform used a suction cup vacuum system to stick to the surface and crawl to the desired trajectory. The onboard nondestructive testing (NDT) sensor was eddy current to measure the thickness of cracks and corrosion. The robot also had a camera. In addition to the robotic platform, the report mentions the use of neural networks for rivet segmentation, which unfortunately produced poor results and forced them to use conventional segmentation techniques. However, it is impressive, as it happened during the second AI winterFootnote 1 .
The ANDI crawler was tested in a curved sample, and an eddy current probe was deployed. Credits to M.W. Siegel et al. [Reference Siegel, Kaufman and Alberts28].

In the following years, there were more efforts to inspect the skin of the aircraft using robotic crawlers, usually teleoperated, tethered and using vacuum suction cups, vortex or custom wheeled structures, such as the second version of the crawler developed by Carnegie Mellon University, robot-CIMP (Crown Inspection Mobile Platform) [Reference Siegel and Gunatilake30] (Fig. 5). Zhiwei et al. [Reference Zhiwei, Muhua and Qingji31] presented a crawler that had a cruciform structure, cameras and the ability to identify rivet cracks using a fuzzy SVM approach. The comparative advantage of using this type of robot compared to others is that it is the best for applying contact-type NDT methods such as eddy current, phased array ultrasonics or active sources for thermography. Rodriguez et al. [Reference Leon-Rodriguez, Sattar and Park32] describe a wheeled robot that can climb on non-ferrous surfaces using the vortex adhesion technique. It was a versatile platform, but with a low payload (0.2kg), and could carry only a camera system. In 2014, Lufthansa Technik presented a similar system explicitly developed for aircraft inspections [33]. The mobile robot for fuselage inspection (MORFI) was using active vacuum pads, an active thermography source (inductor coil) and a thermal camera to identify cracks in carbon fibre-reinforced plastics (CFRP). In 2019, Papadimitriou et al. [Reference Papadimitriou, Andrikopoulos and Nikolakopoulos34] presented a more advanced design of a crawler called the ‘Vortex robot’, which could support up to 5.9kg payload. When deployed on a Boeing 737-400, they managed to demonstrate excellent manoeuvrability on curved surfaces, such as the fuselage. In 2022, Samarathunga et al. [Reference Samarathunga35] described another wheeled platform with ducted fans that move on the surface of the aircraft. The platform was using a thermal camera to monitor water ingression in honeycomb composite structures. They selected to provide power using batteries, which is extremely critical in the balance between weight and operation duration. Ramalingam et al. [Reference Ramalingam36] described a more recent and advanced approach using a reconfigurable climbing robot (Fig. 6) that can stick to the aircraft surface and perform a visual inspection. The focus of the paper was mainly on describing the performance of DL approaches in identifying defects. The robot was teleoperated without any sensors that could be used for autonomous navigation.
The CIMP crawler on top of a Boeing 747 in the hangars of Northwest Airlines in Minneapolis, Minnesota. Source online: Ref. (29).

Reconfigurable climbing robot for visual inspection. Credit Balakrishnan Ramalingam et al. [Reference Ramalingam36] (CC-BY).

3.2 Unmanned aerial vehicles
If one type of platform has attracted the most interest in aircraft inspection, it is unmanned aerial vehicles (UAV) or drones. An argument that supports this could be that two commercial inspection providers, Mainblades and Donecle, already provide this as a commercial service using off-the-shelf and custom-made drones, respectively. UAVs are not very popular in contact NDT methods. Various efforts are being made to use ultrasound probes, such as those of Zhang et al. [Reference Zhang37] and Kocer et al. [Reference Kocer38]. However, most aerial inspections are still visual and use normal red-green-blue (RGB) cameras mounted on gimbals.
Aerial inspection has certain advantages that help it gain traction. One of the first reported examples was the cooperation of EasyJet and the University of Bristol in 2014, flying a teleoperated drone to identify lightning strikes on the skin of the aircraft [Reference Woodrow39]. Maintenance personnel do not work at height when using UAVs, and there are cost reductions because there is no need to build scaffolds or pay for liability insurance. There is also improved mobility, as any upper part of the aircraft can be accessed, and the data are high quality and consistent because the platform performs a specific optimised flight path. Yet, failing to recognise the role of DL algorithms in facilitating the automatic detection of artefacts in captured images would be a significant oversight. After Alexnet’s breakthrough performance [Reference Krizhevsky, Sutskever and Hinton40], the research community became confident in the capabilities of convolutional neural networks (CNN) and explored different architectures to classify and localise issues on the skin of the aircraft [Reference Bouarfa and Serafico41]. In the following years, researchers have employed one-stage detectors (proposal-free) such as You Only Look Once (YOLO) as presented by Connolly et al. [Reference Connolly42], but also two-stage detectors such as mask RCNN as described by Dogru et al. [Reference Dogru43].
Many research teams have also decided to design custom drones to optimise performance, reduce weight and increase safety. Papa and Ponte [Reference Papa and Ponte44] implemented a micro-UAV with a high definition camera that performs visual inspection on aircraft. They used sonic range sensors to detect and avoid obstacles. They focused primarily on the design of the drone and did not mention any navigation strategy.
Another interesting approach that involves a rolling cage is the design presentedby Borik et al. [Reference Borik45]. Although the inspection task did not target aircraft, it was still a valuable concept. In the drone design, they integrated a shock-absorbing 3D-printed rolling cage that allows them to inspect parts in close proximity and improve the safety of both the asset under inspection and the human operators. In their application, the concept was to inspect the walls of a duct, so the target was to maintain a constant distance from the asset, which is also relevant in an aircraft inspection.
In conjunction with performing visual inspections, there is also the possibility of using UAVs carrying thermal cameras. There are two modes of operation. The popular approach is passive thermography, which is used in inspecting buildings, power lines, etc. The more advanced approach is to use active thermography, using optical thermal excitation sources. The latter approach is suitable for identifying defects in composite structures by injecting external energy and monitoring the transient phase of the cooling stage. As aircraft fleets increasingly transition from metal to composite aircraft, the demand for active thermography methods is increasing, highlighting their enhanced value in ensuring safety and efficiency. However, employing active thermography sources on a drone is challenging, considering the power consumption requirements. An example was a thermal drone carrying four halogen lamps (total of 1 kW). The aim was to identify defects in composite structures, such as voids and delamination, using active thermography and DL classifiers on the cloud. The experiments are described in detail by Deane et al. [Reference Deane46] (Fig. 7). Another effort of using an infrared (IR) camera on a drone is described by Hruz et al. [Reference Hrúz47]. Their method integrated the use of passive thermography with a commercially available drone (DJI Mavic 2 Thermal) alongside radio-frequency identification (RFID) tags for labelling purposes. In terms of navigation, a waypoint approach was followed using the supported navigation modes of the platform.
Active thermography UAV experiment on wind turbine blade (composite structure). Credit: Deane et al. [Reference Deane46] (CC-BY).

3.3 Ground mobile robots and cobots
It is clear that there are benefits in using aerial robotics in aircraft inspection, but there are also limitations. Ground robotics have difficulties in capturing areas on top of the aircraft or moving freely in the open space since the ground is shared with other inhabitants, static or moving, but they also have unique capabilities that can be utilised. Robotic ground platforms are not weather-dependent; they are not affected by strong wind or rain. They have a reduced setup time with minimal preparation to go live. They have extended operation times supported by large batteries and autonomous charging in dedicated bays. They have significant payload capabilities, carrying sensors and cobots; for example, Husarion’s Panther has an 80kg payload. They are safer and are perceived as more user-friendly by humans. Mobile ground platforms are less likely to face stringent regulatory hurdles compared to drones (shared airspace). Drones require special permissions and must comply with aviation regulations, which can complicate their use in certain areas, especially in airport environments. Ground mobile platforms are generally less expensive to operate as they do not require specialised training for operators (pilot certifications), frequent battery replacements, etc.
A very interesting case study related to contact-based NDT inspections comes from the cooperation between Universal Robots and Olympus [48]. They demonstrated a scenario of ultrasonic inspection of the skin of the aircraft using a cobot (Fig. 8). Although additional information has not been disclosed, it appears that the cobot is mounted on a fixed platform, allowing access to the aircraft, which is positioned within the manipulator’s reach. Ideally, the cobot should be mounted on a mobile platform to allow enhanced mobility and flexibility during inspection. The Husarion Panther mobile platform [49], which has a payload of 80kg and a compatible battery, can support this operation, as illustrated in Fig. 9.
Ultrasonic inspection using a cobot on a static base. Credits: Universal Robots and Olympus [48].

Panther platform can support a cobot and add mobility to the inspection. Credits: Husarion [49].

3.4 Comparative assessment of robotic inspection modalities
Each of the crawler, drone and ground robotic platform systems presents a distinctive balance between accessibility, sensory capabilities, regulatory constraints and scalability at the fleet level. To make these trade-offs explicit, Table 2 summarises the main operational, economic and regulatory attributes. The optimal platform for deployment varies according to the specific requirements of each application, favouring the one that fulfils the most significant number of criteria.
Features comparison among different robotic platforms

4.0 Navigation and localisation for aircraft-inspection robots
Reliable navigation is the prerequisite for any automated aircraft inspection. The robot must know both where it is and where it must go before the sensor data have any value. This section presents various approaches onboard navigation algorithms, and it complements with analysis on potential external positioning systems. The last section explores indoor demonstration cases to define a benchmark for the navigation of robotic NDT platforms inside the hangar.
4.1 Robotic navigation in aircraft inspection
Robotic navigation is the ability of mobile robots to perceive the environment, decide the destination, and move toward it in the most efficient way. There are various core components that work together to enable robots to navigate in various environments autonomously, efficiently and safely. Each component plays a critical role in ensuring that the robot can locate itself, plan routes, map its surroundings and control its movements effectively. The first is localisation, which is the process of determining the position of the robot within an environment. Path planning involves determining the optimal route that the robot should follow to reach its destination while avoiding obstacles. Finally, mapping is the process of creating a representation of the environment that the robot can use for navigation.
Navigation is a concept that is relevant in all mobile robotic platforms, whether they are moving on the ground or in the air. There are many factors that influence and form the optimal approach selected. It depends on the environment and the task. Additionally, the kinematic model of the robot and its perception capabilities are the building blocks on which the navigation approach is built. In our case, the environment is either the hangar or the ramp area, and the mission is the digitalised aircraft inspection task of a formal routine check.
The concept of simultaneous localisation and mapping (SLAM) was first introduced in 1986 in San Francisco by Smith et al. [Reference Smith and Cheeseman60] at the International Conference on Robotics and Automation (ICRA) conference. In this study, it was suggested that it is possible to estimate the uncertainty in the relationship between two frames. Reducing uncertainty can be achieved by incorporating sensory information from the frames, regardless of where the measurement is taken. Durrant-Whyte et al. [Reference Durrant-Whyte and Bailey61] presented SLAM as a probabilistic problem, emphasising the importance of handling uncertainty in robot motion and its onboard sensor measurements. They described two primary computational approaches to solve the SLAM problem: the Extended Kalman Filter (EKF-SLAM) and Rao Blackwellized particle filters (FastSLAM). It is intriguing that even though the authors recognise that SLAM is theoretically resolved, challenges persist in actual applications, especially with complex outdoor settings and the creation of perceptually detailed maps.
Thrun et al. [Reference Thrun, Burgard and Fox62] discussed robotic navigation as a key application of probabilistic techniques in robotics. They emphasised the importance of handling uncertainty in robotic navigation, using probabilistic methods to deal with imperfect sensor data and unpredictable environments. The authors presented probabilistic algorithms for these navigation tasks, such as Markov localisation, grid-based and Monte Carlo approaches to localisation and SLAM. They also introduced Bayesian filtering techniques, like Kalman filters and particle filters, which are fundamental to many probabilistic navigation algorithms.
In the field of aircraft inspections and maintenance, one of the most relevant cases is the air cobot, which was implemented as part of Airbus’s “Hangar of the Future.” In Refs [Reference Leiva63, Reference Jovancevic64], the authors described their concept in which a ground platform, called air-cobot (4MOB by Sterela), performed maintenance checks using a camera. The robot was equipped with two laser range finders and two stereo cameras (front and back), a global position system (GPS) receiver and an inertial measurement unit (IMU). The robot navigated around the aircraft, passing through specific waypoints and using the aircraft as a reference. The latter was very important since the platform performed localisation based on the object of interest. This is particularly significant given that the operational settings are expansive, open territories lacking distinctive landmarks. In their localisation approach, they matched the generated point cloud with the known aircraft model but also performed visual localisation, using pattern recognition on the distinct components of the aircraft (windows, landing gears, etc.). This method represents a notable accomplishment, particularly when recognising that it relies on pure computer vision algorithms rather than DL models. The authors claimed that the target achieved was the decrease in inspection time, but they did not define tasks and a specific number to quantify the optimisations. There was no mention of navigation accuracy, repeatability or overall inspection duration.
In a similar task, Lie et al. [Reference Liu65] used a mobile platform (Warthog by Clearpath) for the inspection and maintenance of a railroad. The task consists of many phases, including the navigation to load location, railroad conversion and the navigation to the location on the track. The first part was essentially the phase in which the robot moves from its base, passes through various checkpoints and reaches its destination, where it is loaded onto the rail track conversion unit. The platform was equipped with 3D Lidar, a camera, real-time kinematics global navigation satellite system (RTK-GNSS), IMU and depth camera. In the article, the authors demonstrated that their development implemented autonomous navigation employing sensor localisation, path planning, path tracking and obstacle avoidance. They mentioned that the platform moves towards the waypoints, ensuring a 1.5m precision for safety.
In the object avoidance core component during the last years and with the rise of DL algorithms, there is increasing involvement in combining the traditional point cloud processing approaches with real-time object detectors like you-only-look-once (YOLO). Hu [Reference Hu66] presented an approach that combines moving obstacles clustered from laser point clouds using the density-based spatial clustering of applications with noise method (DBSCAN) and the output of a YOLOv3 algorithm. In the experimental tests, it was mentioned that the maximum error in obstacle estimation is approximately in the range of 0.6m, without describing how they calculate the ground truth. The authors reported that object detection is not fast enough to be responsive, but considering the progress since the version 3 era and the proper selection of onboard hardware, this could be less of a problem. Several years later, Adiuku et al. [Reference Adiuku67] presented a more advanced and complete approach to integrate YOLOv7 into the robot operating system [Reference Quigley68] (ROS) navigation stack for ground robots operating inside hangars. They integrated rapidly exploring random trees (RRT), dynamic windows approach (DWA) and object detection into a new module called NAV-YOLO. The authors reported improvements in performance compared to the standard non-customised ROS navigation stack based on the number of collisions, path length and duration. Similarly, with the previous case, the computational complexity was so high that the new navigation module was operating at 0.3Hz.
Mohan et al. [Reference Mohan69] combined machine vision and navigation, specifically in aircraft maintenance. At the beginning of the procedure, the robot moves into the hangar to build the map using FastSLAM and build a semantic map in parallel using a DL object detector (VGGnet-16) that identifies aircraft parts that potentially need maintenance. They claimed that they can recognise if the part needs replacement and send a notification (report) to the technical team. It was assumed that the aircraft was always parked in the same place and that the spare parts were placed in a robot-friendly store so that the robot could go and retrieve the spares. They did not use information on aircraft type or use hangar infrastructure to infer further information, assuming that they do not operate in a smart hangar. Furthermore, they presumed that the sensors could detect damages solely through visual cues and that all relevant components would be within the robot’s sight range.
Ruiqian et al. [Reference Ruiqian, Juan and Hongfu70] have proposed an interesting approach using UAV and fiducial augmented reality University of Cordoba (ArUco) markers. In the suggested procedure, the drone starts flying in teleoperation mode to create the 3D model of the aircraft. They did not use stereo cameras; instead, they took pictures from different positions and used a photogrammetry application (PIX4Dmapper) to create the 3D model. During their experiments, they realised that there was an inaccuracy in the drone flight route, and they decided to introduce fiducial markers as external references to correct and improve the localisation performance. Cazzato et al. [Reference Cazzato71] progressed this approach further by assuming that there are known textured planar patches (graphs) on the surface of the aircraft, such as the airline flag, and a known 3D model with the same graph stored online. The focus was on determining the aircraft’s pose (position and orientation) relative to the UAV. The authors proposed a vision-based solution that uses monocular images from an on-board RGB camera to estimate the six-degree-of-freedom (6-DoF) pose of an aircraft. After feature detection on the patches and pose estimation is performed, an error correction update on the UAV is performed in real-time.
An alternative surface-centred path-planning paradigm is also a valuable option to consider when inspecting complex structures such as the surface of the aircraft. Recent advances in UAV path planning demonstrate significant potential for aerial structural inspection optimisation. Wang et al. [Reference Wang72] developed a 3D surface inspection algorithm that employs normal vector filtering and integrated viewpoint evaluation, achieving a reduction in flight path length by 72% and total inspection time by 80% through Monte Carlo tree search optimised viewpoint selection compared to other techniques. The geometric filtering approach of their method uses surface normals to constrain camera alignment, ensuring optimal sensor incidence angles during aerial inspections of complex curvatures. This method exhibits significant promise for the inspection of aircraft that have complex surface structures.
In the context of aircraft inspection, another approach is to use a combination of robotic platforms to assist in navigation. Some of the works, such as the one described by Sun et al. [Reference Sun, Zhang and Ma74], present a combination of aerial and ground robotic platforms using red-green-blue-depth (RGB-D) cameras to scan the aircraft surface for potential defects, such as dents and cracks. The drone first builds a coarse model of the aircraft, and then a 3D high-precision laser scanner performs a detailed scan using an iGPS system with millimetre accuracy. They employed a coverage path planning algorithm based on a custom version of the Monte Carlo Tree Search method to generate the waypoints that cover the regions of interest. However, they presented the results only in simulation without describing a real application.
4.2 External positioning systems
It is a common strategy to fuse onboard sensor feedback and external localisation sources, which report the position (or pose if Euler angles are known), to improve the accuracy and reliability of robot navigation. Depending on the environment, indoor or outdoor, there are solutions that can be used to support the execution of the mobile robot’s task. If the operational workspace is outdoor, the usual approach is to integrate the (GPS and the global navigation satellite system (GNSS) [Reference North75], assuming that the environment allows for clear reception of satellite signals. In addition, there is also the option of RTK-GNSS, which can significantly enhance the accuracy of GNSS, making it suitable for applications requiring high precision, such as autonomous robots. In indoor workspaces, an ultra-wideband (UWB) system is the most common solution for positioning and tracking and was one of the technologies included in the concept of the ‘Hangar of the Future’ [Reference Bailey76]. UWB systems sends very short and low-power pulses of radio waves. It simultaneously spreads its signal across many different frequencies (no licence required) [Reference Alarifi77], occupying a wide bandwidth. Receivers (mini-tags) are transceivers that can transmit and receive signals. Mini-tags are mounted on mobile robotic platforms. Anchors (or antennas) are typically fixed reference points strategically placed throughout the environment.
In outdoor applications, such as precision agriculture, RTK-GNSS is widely used, as it offers centimetre-level accuracy. Thepsit et al. [Reference Thepsit78] combined a 3D light detection and ranging (LiDAR) within a range of 90 to 270 degrees employing an adaptive network-based fuzzy inference system (ANFIS) for data fusion instead of the preferred approach of using an extended Kalman filter (EKF) [Reference Chen, Hu and McDonald-Maier79]. In the training process, they achieved a minimum root mean square error (RMSE) of 0.4m. In addition, they performed tests at various speeds (1–10km/h) using a small golf cart as a platform, getting an average percentage error of approximately 2.6%. In another case related to agriculture, Pini et al. [Reference Pini80] described the performance of RTK-GNSS under different conditions. The first experiment was conducted in an open field with a maximum error of approximately 3cm. The second experiment was in a vineyard with dense foliage that partially blocked the line of sight. In this case, the positioning error was around 10cm. The last and most interesting experiment was inside a greenhouse. In this case, there was a plastic or glass roof, unlike metallic ones mostly found in hangars. The positional error in this case was increased to 1.3m. This is a sign, as expected, that this approach regarding the aircraft inspection could be considered only in the ramp area, but not indoors.
In indoor environments, UWB systems are the usual way to provide the position of the robotic platform in the operational space. In robotic navigation, the estimated position feedback is fused with onboard signals utilising encoders and/or the IMU, often called dead reckoning. Yue et al. [Reference Yue81] used a mobile platform with tracks and four beacons in an open field environment. They fused IMU and UWB using a backpropagation neural network (BPNN), and they managed to achieve a positioning error of 2cm, moving up to 1cm. However, the receiver tag had a full line-of-sight (LOS) with the four beacons. Another case was described by Park et al. [Reference Park, Cho and Martinez82], but in construction sites. Apart from the dead reckoning and a four-beacon UWB system, they used the site’s building information modelling (BIM). The latter was used in path planning as it can act as a map of the environment when projected in 2D. The test bed was 2m x 2m and four different fusion algorithms were used. In terms of the accuracy achieved, they mentioned that, on average, the estimated path was within 0.5m compared to ground truth. Another similar case by Marquez et al. [Reference Marquez83], in a comparably small testbed, presented sub-centimetre accuracy using three beacons and EKF for fusion without any obstruction. However, in a natural working environment, such as a hangar, in many positions, occlusions in the LOS are expected. Another example following a three-stage experiment using a clear field, a field with static interference, and one with dynamic interference (polluted by noisy signals), presented by Sbirna and Sbirna [Reference Sbirna and Sbirna84] targeting warehouse environments. The experiments were carried out in a room in a 3.5m x 4.8m space, and the platform was small (approximately the size of a Turtle Bot 3). In the first case, the accuracy was close to 2cm. In the presence of interference, static led to 20cm deviations from the ground truth and dynamic to 10cm, proving the robustness of UWB systems in signal jamming.
In addition to RTK-GNSS, mainly for outdoor environments, there is the option to use 5G new radio (NR) technology for robot localisation [Reference Kabiri85]. There are many benefits in addition to the fact that there is already an infrastructure in place for robot navigation, such as wide coverage, high throughput, bandwidth and carrier frequency, low latency and MIMOFootnote 2 technology. Networks using 5G have introduced a new reference signal in the downlink for robot localisation known as a positioning reference signal, which allows the extraction of these measurements. The V2X (vehicle-to-everything) features, such as V2V (vehicle-to-vehicle), V2N (vehicle-to-network) and V2I (vehicle-to-infrastructure), are quite interesting. The V2X cellular standard, which is based on the 5G air interface, can be used in robot fleets through the side link (SL). This technology enables direct data exchange between vehicles without involving the rest of the network. It will be essential for collaborative tasks and localisation, whether within or outside the base station coverage area.
In a more detailed study, Karfakis et al. [Reference Karfakis86] performed tests using three setups, considering 5, 10 and 15 ground node B base stations using a Gazebo simulation. In their approach, they considered three metaheuristics, hyperbola crossing points, particle swarm optimisation and genetic algorithms for estimating the position in 5G NR network topologies. The best result in terms of position accuracy was 3.813 ± 1.862 metres, with an overall mean execution time during the movement in the path of 0.050 ± 0.042 seconds. Overall, there is potential for improving the accuracy, although there are no reports from real experiments. In general, it seems that in later stages, with more mature approaches and a dense network (airports are places with good coverage), there is the option to integrate 5G localisation into the toolkit of available techniques.
In indoor environments, an alternative method that can contribute to robot navigation is WiFi-based localisation. In most of the described methodologies, the WiFi fingerprinting technique is usually adopted. This method is based on the creation of a database of the strengths of WiFi signals at various locations within an environment, which can then be used to estimate the position of a robot [Reference Ye and Peng87]. In addition to that, there is the option to use trilateration, which is based on measuring the strength of WiFi signals received from multiple access points (APs) in the area. The strength of these signals is typically measured as the received signal strength (RSS). There is also the assumption that there are more than three APs in known locations. Biswas and Veloso [Reference Biswas and Veloso88] described their methodology in combining WiFi signal measurements to create a perceptual model of the robot position hypothesis. Using that in combination with odometry and a particle filter, they managed to estimate the location. In their experiments, they achieved a mean positional estimation error of 1.2m and a maximum error of 1.8m in 80% of the duration of the experiment. In addition to other approaches, researchers employ machine learning algorithms. These algorithms can learn from multidimensional measured data with position labels to reduce the impact of RSS fluctuation and improve fingerprinting accuracy and system reliability [Reference Sabanci89]. Lee et al. [Reference Lee90] presented an approach that combines SLAM and WiFi positioning methods. They used WiFi fingerprinting to collect data and link them with the mapping process. After that, they built the WiFi radio map using the RSS values collected, and during the localisation, they compared the trained signatures with the measured values. The interesting result was that with a minimum number of 40 APs, the position accuracy was close to 1m. In the hangar environment, with many changes in the configuration (different number of aircraft in maintenance, different types, scaffolding, etc.), this approach might be a challenging case.
4.3 Indoor navigation case studies
In the design and testing of the novel automated inspection approaches, reference systems are required to compare performance. In addition to the concept presented in 2017 by Leiva et al. [Reference Leiva63], there are no other experiments that are directly relevant to aircraft inspections that combine mobile robotics and NDT. Even in this work, there are no specific references related to the accuracy of the solution. However, knowing the characteristics of the operational environment, the nature of the tasks that should be performed, and the available equipment in terms of both the platform and the smart hangar, similar concepts can be identified and capture metrics of the achieved performance which can be used as guidelines even if the end application is not strictly an aircraft inspection.
Bostanci et al. [Reference Bostanci91] presented navigation experiments using a Turtle Bot 3 robot and a four-beacon UWB internal positioning system (IPS) manufactured by Pozyx. The robot uses the ROS standard navigation stack and moves on a 10m x 10m test bench. They used UWB to estimate both the initial position and assist in the localisation. Since the platform cannot support heavy-lifting computational algorithms, they adopted the squared range least squares (SR-LS) algorithm for the fusion. They reported that the accuracy of open space cases with good LOS is approximately 10cm. Szrek et al. [Reference Szrek92] experimented with a custom mobile platform that is supposed to perform inspections in a GNSS-denied environment. The robot was not equipped with a LiDAR, but has an IMU, wheel encoders, a visual camera and a UWB-based INS. They mentioned using a real-time appearance-based mapping (RTAB-Map) [Reference Labbé and Michaud93] as visual odometry (VO). The test was carried out in a parking lot and ground truth data was provided by a robotic total station (RTS), which is used for surveying and building construction (submillimeter and subdegree accuracy). The reported mean error in position estimation was 15cm, mainly based on inertial and UWB feedback, since the VO was relatively inaccurate in their test case.
Navigation without external IPS is also possible, but accuracy and reliability depend on the case. Suleymanoglu et al. [Reference Suleymanoglu, Soycan and Toth94] performed tests in an office building corridor. The space was restricted, and there was no report of moving obstacles. However, there is a lack of distinctive features as the corridors are featureless environments. They used a specific variation of a graph-based simulation on the SLAM algorithm and achieved a localisation error of 0.3m. Abdullah et al. [Reference Abdullah95] presented another example of indoor navigation without IPS to detect cracks. The visual detection part was performed using a YOLO object detector, but at this point the focus was on localisation. They used a relatively small platform, such as Turtle Bot 2, equipped with a Kinect v2 RGB-D camera to create the point cloud. In terms of navigation, they used ORB-SLAM2 [Reference Mur-Artal and Tardos96]. Unfortunately, they do not report the accuracy of using the approach in a real environment; they only base their evaluations on experiments on the TUM dataset [97], a benchmark evaluation of RGB-D systems. Liu et al. [Reference Liu98] suggested a modified version of adaptive Monte Carlo localisation (AMCL) algorithms that is applicable to 3D LiDARs. The AMCL is part of the classic navigation stack in ROS and is suitable for planar LiDARs. They used an absolute tracker to evaluate performance using a tracked mobile platform. In addition to their custom AMCL derivative, they reported the accuracy of the ROS navigation stack and Google’s Cartographer [Reference Hess99]. The mean error in the positions was 10cm for the former and 8cm for the latter, and the error in the heading was 9
 ${{\rm{\;\!}}^{\rm{o}}}$
and 5.5
${{\rm{\;\!}}^{\rm{o}}}$
and 5.5
 ${{\rm{\;\!}}^{\rm{o}}}$
, respectively. The results revealed that the heading accuracy of a skid-steering robot with tracks is generally lower than that of robots with explicit steering due to inherent slippage and complex wheel-ground interactions. However, the location estimation was satisfactory. Supper et al. presented a similar custom robot, but this time using differential drive kinematics with very similar sensors [Reference Supper100]. They conducted the experiment in an area of approximately 46m
${{\rm{\;\!}}^{\rm{o}}}$
, respectively. The results revealed that the heading accuracy of a skid-steering robot with tracks is generally lower than that of robots with explicit steering due to inherent slippage and complex wheel-ground interactions. However, the location estimation was satisfactory. Supper et al. presented a similar custom robot, but this time using differential drive kinematics with very similar sensors [Reference Supper100]. They conducted the experiment in an area of approximately 46m
 ${{\rm{\;\!}}^2}$
and used a motion capture system to record the ground truth. It was an interesting experiment, since they performed it outdoors, using only on-board sensors and without the assistance of GNSS. In terms of software, they used the ROS navigation stack. After performing 21 tests for different positions within the test bench, they came up with approximately 20cm positional accuracy and 5
${{\rm{\;\!}}^2}$
and used a motion capture system to record the ground truth. It was an interesting experiment, since they performed it outdoors, using only on-board sensors and without the assistance of GNSS. In terms of software, they used the ROS navigation stack. After performing 21 tests for different positions within the test bench, they came up with approximately 20cm positional accuracy and 5
 ${{\rm{\;\!}}^{\rm{o}}}$
in heading.
${{\rm{\;\!}}^{\rm{o}}}$
in heading.
5.0 Smart infrastructure and enabling considerations
Moving from individual robots to the operational environment, this section explains how hangar layout, embedded sensors and communication networks converge to support safe real-time human-robot collaboration. Sustainability and cybersecurity are treated as first-class design constraints rather than afterthoughts.
5.1 Smart hangar
Perhaps one of the most notable efforts to introduce automation and data-driven aircraft maintenance was when Airbus presented the concept Hangar of the Future in 2016 (Fig. 10) as an innovative initiative to revolutionise aircraft maintenance through digitalisation and automation [Reference Jess101]. The project combined technologies such as drones, collaborative robots, sensors and data analytics with aircraft documentation and in-service data to optimise maintenance processes. A key component was the development of robotic inspection systems, including an advanced drone that can inspect an entire aircraft in just 30 minutes. Using these technologies, Airbus was aiming to improve maintenance efficiency, reduce aircraft downtime and improve the quality of inspections. The Hangar of the Future represented a significant step towards transforming the aircraft MRO sector, leading to substantial cost savings and improved safety in the aviation industry. Shin et al. presented another approach to the concept cited also as Hangar of the Future, specifically for composite aircraft [Reference Jin102]. Their concept integrates fixed ultrasonic propagation imaging devices and tilting mirrors to scan the skin of the aircraft, emitting laser ultrasonic beams at a scanning rate of 20kHz. They tested their systems using two CFRP coupons, managing to identify defects in the scale of 24mm × 24mm, but the system was far from able to fully scan a commercial aircraft in a real hangar. They also did not mention anything about additional automation and data analysis of alternative data sources. It was rather a proof of concept of a potential fixed NDT system in the hangar. Rice et al. [Reference Mark103] presented another interesting example of how researchers think of the concept of the Hangar of the Future. In their approach, fixed cameras, drones and handheld devices capture images from the aircraft. The images were sent to a central server that processes the images using advanced computer vision techniques. The results could be visualised on maintenance personnel tablets and allow them to decide if the issues require further investigation. In addition, by combining stereo cameras and the 3D aircraft model, they could provide image localisation, which was eventually linked to defect localisation.
The Hangar of the Future demonstrator. Credits to Airbus [Reference Jess101].

Another strategic factor relevant to I5.0 is sustainability, pushing the aviation industry to evolve from focussing on economic benefits to embracing the ‘triple bottom line’, which encompasses social and environmental impacts alongside financial performance. The International Civil Aviation Organization (ICAO) Global Coalition for Sustainable Aviation monitors progress in this area. In the near term, operations and infrastructure present significant opportunities to improve sustainability. The concept of a sustainable hangar, beyond the smart features, is closely linked with the Hangar of the Future concept. This smart sustainable hangar represents an excellent opportunity for innovation by integrating advances in hangar infrastructure, robotics and artificial intelligence technologies [Reference Plastropoulos104]. Successfully developing such a hangar could lead to better safety and environmental impact.
Although building a smart hangar from the ground up with all the enabling technologies at once is still a distant goal, new hangars are incorporating some of these technologies, and current hangars might be updated to include them. In Singapore, ST Engineering’s 84,000m
 ${{\rm{\;\!}}^2}$
hangar complex opens by end-2026; the facility is designed around Industry 4.0 workflows, paperless operations, and autonomous GSE [105]. In 2024, Delta TechOps achieved FAA approval for the use of autonomous drones for visual inspections, with plans to implement them at their Atlanta hubs in 2025 [57]. Virgin Atlantic started using digital sign-off to confirm flight readiness of an aircraft as part of its Engineering Transformation Programme [Reference Angus and Brown106]. Engineers, pilots and other personnel now exchange digital information about the aircraft’s status, all of which is consolidated into a unified data storage. According to a Royal Aeronautical Society workshop, by 2050, fully decarbonised hangars managed by AI are expected to become standard throughout the industry. The primary barriers to faster adoption include significant initial capital expenditure, challenges in integration with existing IT infrastructure, the certification of hybrid human-robot processes, cybersecurity for a broadened data boundary and the need for reskilling the workforce. These challenges, rather than the technology’s readiness, are the main concerns for widespread implementation.
${{\rm{\;\!}}^2}$
hangar complex opens by end-2026; the facility is designed around Industry 4.0 workflows, paperless operations, and autonomous GSE [105]. In 2024, Delta TechOps achieved FAA approval for the use of autonomous drones for visual inspections, with plans to implement them at their Atlanta hubs in 2025 [57]. Virgin Atlantic started using digital sign-off to confirm flight readiness of an aircraft as part of its Engineering Transformation Programme [Reference Angus and Brown106]. Engineers, pilots and other personnel now exchange digital information about the aircraft’s status, all of which is consolidated into a unified data storage. According to a Royal Aeronautical Society workshop, by 2050, fully decarbonised hangars managed by AI are expected to become standard throughout the industry. The primary barriers to faster adoption include significant initial capital expenditure, challenges in integration with existing IT infrastructure, the certification of hybrid human-robot processes, cybersecurity for a broadened data boundary and the need for reskilling the workforce. These challenges, rather than the technology’s readiness, are the main concerns for widespread implementation.
5.2 Robot-enabling hangar environment considerations
New hangars should be designed assuming that autonomous robotic platforms will perform maintenance and repairs together with technical personnel in the near future. Emphasising operational and navigational elements, as well as collaboration between humans and robots, is essential for guaranteeing safety and expediting the advancement of novel automation and robotic implementations. Integrating robotics into hangar operations requires deliberate environmental design to optimise functionality, safety and efficiency. Although there are no dedicated articles related to hangars, it is possible to draw on research on robot-friendly facilities such as hotels, residential, hospitals and industrial settings. The following principles could be adapted for hangars:
-
• Physical Infrastructure and Spatial Design
Hangars should emphasise flexible configurations to support various robotic functions, including aircraft inspection, parts transport and maintenance. It is vital to maintain wide and clear paths for mobile robots, such as autonomous guided vehicles, to safely manoeuvre around aircraft and equipment, preventing collisions, as presented by Ivanov and Webster [Reference Ivanov and Webster107] for hospitality facilities. Sufficient overhead clearance is necessary for drones or robotic arms to carry out inspections on the sides and upper sections of the fuselage. Utilising high-contrast visual markers or Quick Response (QR) tags on floors and walls can assist robots with navigation, allowing accurate localisation and path planning, as cited by Niechwiadowicz and Khan [Reference Niechwiadowicz and Khan108] for hospital facilities. Modular storage units with standardised interfaces can facilitate quick robotic access to tools and spare parts. Dedicated areas for robots equipped with wireless charging pads will reduce idle time. Incorporating sloped floors or drainage systems can help alleviate slip risks in hangars where hydraulic fluids or de-icing chemicals are present.
-
• Embedded Sensors, Networks and Digital Integration
A robot-inclusive hangar requires embedded sensor arrays, such as UWB, RFID and/or cameras, for real-time mapping and localisation. These systems enable robots to track aircraft positioning, detect human workers in shared spaces, and monitor hazardous conditions (e.g., fuel leaks). Centralised data hubs, akin to the certification model of network security protocols, facilitate secure interactions between robots, aircraft systems and maintenance databases. High-speed data networks and edge computing nodes, as advocated in Tan et al. [Reference Tan, Mohan and Watanabe109] robot inclusion framework, reduce latency for time-sensitive tasks such as emergency response.
-
• Safety and Human-Robot Collaboration
Safety is paramount in environments where robots and humans coexist. Hangars should implement safety protocols, such as geofencing to restrict robot movement in areas occupied by humans, sensitive equipment or dangerous areas for the robots themselves, for example, close to the hangar roof. Collaborative robots equipped with advanced sensors can work in conjunction with human technicians to perform tasks such as component assembly or inspections safely. Visual and auditory alerts can also be used to signal robot activity, ensuring clear communication between human workers and machines.
In manufacturing environments such as the automotive industry, there is already a well-defined framework that ensures safe collaboration. The task-level analysis refers to the harmonised collaborative robot safety standards ISO10218-1:2025 (industrial robots [110]), ISO 102218-2:2025 (industrial robot applications and robot cells [54]) and ISO/TS15066:2016 (robots and robotic devices – collaborative robots [58]), which set specific requirements such as speed and separation, power and force and contact force limits. The methodology outlined in RIA TR R15.306 [111] establishes the framework to define the requirements of a formally documented, task-oriented risk assessment. Specifically for the MROs, there is no evidence that a similar framework exists. However, EC Implementing Regulation (EU) 2021/1963 made Safety Management System (SMS) mandatory for all EASA Part-145 organisations, where although there is no specific mention in robotic applications, the introduction of collaborative or autonomous robots could be treated as a new technology/working method and enter the hazard identification and risk assessment cycle of that SMS. Moreover, the EASA AI Roadmap 2.0 [112] outlines a human-centric framework for integrating AI in aviation, prioritising safety, ethical considerations and structured rulemaking to ensure trustworthy AI deployment.
-
• Maintenance of Robotic Platforms
To sustain long-term operations, hangars must include provisions for robotic maintenance and scalability, as detailed by Ivanov and Webster [Reference Ivanov and Webster107]. Dedicated maintenance zones equipped with diagnostic tools can facilitate quick repairs or upgrades for robotic systems.
-
• Scalability Considerations
Additionally, scalable designs that allow for the integration of new robotic technologies will future-proof the hangar as advancements in automation continue to evolve. Moreover, transforming current ground support machinery, such as scissor lifts and cherry pickers, into autonomous units could facilitate the conversion of native equipment into new robotic forms. Additionally, non-engine-driven devices, like tool cribs, have the potential to be transformed into autonomous systems. According to Nakamura and Yuta [Reference Nakamura and Yuta113], the situation becomes particularly challenging when the robot is tasked with pulling a trailer. The robot needs to manoeuvre around people or obstacles around the trailer safely.
-
• Certification and Standardisation
As more wok and research will be carried out, policymakers should compile a smart hangar-specific certification framework that could integrate metrics from multiple domains such as:
-
- Mobility Index: Pathway width, grade, and slope compliance.
-
- Task Efficiency: Time-to-completion benchmarks for robotic inspections versus human personnel linked with key performance indexes related to accuracy.
-
- Safety Score: Incident rates linked to environmental factors (e.g. lighting, surface friction).
-
- Interoperability: Compatibility with the work carried out under the ISO TC184/SC2 service robot standards [Reference Virk, Moon and Gelin114].
By integrating these interdisciplinary insights, hangar designers can develop settings that align robotic self-governance with the distinct requirements of aviation operations, addressing aspects such as spatial flexibility and cybersecurity robustness.
-
• Cybersecurity and Data Governance
As in modern MRO initiatives, it is expected to have interconnected mobile robots, industrial IoT sensors, aircraft data buses, and back-office systems, the smart hangar digital perimeter becomes a high-value target. Therefore, a defence-in-depth architecture is mandatory. Incorporating these recommendations into the ecosystem technologies of the smart hangar ensures that the extended data perimeter is secure, enabling regulators to jointly assess both cyber and physical safety. Some of the suggestions to improve the digital security of the smart hangar are the following:
-
- Align systems that exchange data with the aircraft with the process of the Trusted Aerospace Cybersecurity Framework Guide Process of the Radio Technical Committee for Aeronautics (RTCA) DO-326/ED-202 [115] (often addressed as Cyber DO-178) and its assurance levels. Architectures should satisfy the obligations of EASA Part-IS [116] and the EU Network and Information Security Directive (NIS 2) regarding ensuring the resilience of critical entities [117]. IATA Aviation has also published controls that present a cybersecurity strategy that involves recommendations from a specific working group and a restricted forum of experts [118].
-
- Implement zero-trust principles for mobile robots by mandating certificate-based authentication for each robot, deactivating unnecessary protocols and deploying digitally signed over-the-air updates to mitigate vulnerabilities.
-
- Designing security-aware workflows involves integrating cyber-risk assessment with current safety-hazard analysis, facilitating comprehensive route planning. Consequently, procedures such as warehouse access and task-card synchronisation are performed solely after successful authorisation confirmation. In instances of spoofing detection or integrity compromise, the robots are programmed to return to a secure state.
-
- Apply industrial operation technology hardening. The different networks, such as IT/OT/safety, should be segmented according to the zones and conduits described in IEC62443 [119]. Moreover, each robotic cell can incorporate applicable security measures, including the concept of control families outlined in NIST SP800-82 rev3 [Reference Stouffer120].
-
- Improve personnel competence and improve auditing. As an example, Part-145 internal audits could be enhanced to include ISO 27,001 [121] controls, penetration testing and phishing drills so maintenance personnel are aware and follow safety guidelines.
5.3 Real-time enabling technologies and control
Robotic platforms, navigation systems and smart hangar infrastructure have been demonstrated to offer essential spatial capabilities for automated NDI. The integration of these capabilities, essential for robots to co-exist safely with human technicians, depends on their ability to sense, decide and act within defined time constraints. Consequently, real-time execution is important, not merely an optimisation, but essential to obtain safety certification, allow human-robot interaction and gain regulatory approval. This subsection delineates the specific timing constraints in smart hangar robotics and reviews the sensor, communication and computing technologies capable of consistently satisfying these requirements.
The assured autonomy in a smart hangar ultimately depends on whether sensing, communication, computation and actuation can be closed in real-time behaviour. Modern industrial LiDARs stream up to 2 million pulses per second, generating dense point clouds, with rates ranging from 1Gbps to 10Gbps, while high-speed RGB-D cameras routinely deliver 60–90fps. When these sensors are paired with embedded GPUs like NVIDIA Jetson Orin (275 TOPS), end-to-end latencies will be reduced to just a few tens of milliseconds. This ensures that robotic platforms receive the essential data promptly to make navigation route decisions.
UWB anchors offer 50 to 100Hz pose updates with 3 to 5ms time-of-flight latency, filling the gap when GNSS is denied. Deterministic communication inside the hangar is a feasible option provided by time sensitive networking (TSN). As an example, the emerging IEEE P802.1DP [122] aerospace profile reports sub-
 $\mu $
s jitter across gigabit Ethernet backbones, allowing distributed control across mobile platforms and fixed NDT cells. General profiles also exist for Ethernet beyond aerospace-specific applications. These profiles are defined in IEC/IEEE 60,802 [119] and provide the foundational mechanisms for deterministic industrial communication. When wireless communication is necessary, 5G NR URLLC links (less than 1ms air latency) have been tested in cloud robotic repair cells [Reference Shata123]. Similarly, Wi-Fi 7 (IEEE 802.11be) incorporates targeted features designed to accommodate real-time applications that demand latency constraints and can support soft real-time operations [Reference Belogaev124].
$\mu $
s jitter across gigabit Ethernet backbones, allowing distributed control across mobile platforms and fixed NDT cells. General profiles also exist for Ethernet beyond aerospace-specific applications. These profiles are defined in IEC/IEEE 60,802 [119] and provide the foundational mechanisms for deterministic industrial communication. When wireless communication is necessary, 5G NR URLLC links (less than 1ms air latency) have been tested in cloud robotic repair cells [Reference Shata123]. Similarly, Wi-Fi 7 (IEEE 802.11be) incorporates targeted features designed to accommodate real-time applications that demand latency constraints and can support soft real-time operations [Reference Belogaev124].
In mobile robots, critical safety processes could be executed in real-time loops under a PREEMPT-RT kernel or micro-ROS executor. The ROS 2 real-time working group and vendor drivers have demonstrated bounded worst-case execution times for navigation and actuator control [Reference Kholodnyi, Bedard and Wu125].
Although the design of the entire hangar ecosystem adhering to hard real-time behaviour is more than a challenging task, through the collaborative design of robots integrated with advanced sensors, utilising systems such as TSN/5G for efficient transport, and the implementation of time-deterministic computation and control mechanisms, the smart hangar is adept at ensuring deterministic outcomes. This capability can facilitate the alignment with regulatory standards, which are imperative for facilitating safe and effective operations in environments where human and robotic interactions coexist.
6.0 Comparison between manual and automated inspection
Nowadays, the current inspection process is mainly manual. A typical task begins with the initiation of a task card. In larger MRO businesses, Maintenance Control generates a work order in the back-end system and assigns it to a licensed engineer. In contrast, smaller MROs might utilise a paper-based task or a line in a spreadsheet. The team member assigned to the task must set up and organise supporting equipment, including wheel stands, scaffolding and fall arrest barriers, and ensure that all necessary tools, such as a calibrated flashlight or mirror, are on hand. In inspection-related tasks (visual/handheld), the engineers walk around and touch inspection; the typical sequence is fuselage, left wing, right wing and empennage. They record discrepancies on the task card, including the ATA zone and rough size. If a lightning strike or dent is found, a second specialised inspection is triggered using specific equipment (e.g. PAUT, HFEC). Finally, the inspector signs the Part-145 release [126], and the feedback is retyped by the planning staff into AMOS/M&E software.
The setup time may differ depending on the inspection type and location. As an example, 1A check inspection on the ailerons (zones 306/406) for B737, as described in rows 1 and 2 of Table 1, includes access (move a wheeled two-step platform to the trailing edge of the wing, secure brakes), visual (examination of the surface and mechanical components with a torch), record (manually on notes and take photographs) and close-up (move platform back to the base and fill task card).
Operators and MRO facilities typically adjust OEM MPD recommendations using multipliers that reflect their specific operational efficiencies [127]. As a general rule of thumb, highly efficient maintenance teams with optimal conditions use a multiplier of 1.25. The industry standard for most operations is generally regarded as a 1.5 multiplier. In more demanding situations or when dealing with less experienced crews, a multiplier of 2 is ultimately used. In this case, adopting the 1.5 multiplier results in a 9-minute inspection for each side (6 minutes x 1.5).
Automating aileron inspection could involve employing a quad-rotor capable of hovering near the trailing edge of a B737 and capturing video as it navigates a predetermined path along the hinge line. An estimate of the duration to complete an aileron sweep is approximately 4 minutes per side. The typical aileron length of a B737 is assumed to be between 3 and 3.5 metres. A drone flying slowly at 0.1m/s, executing four passes (top, front, back angle and overlap), could complete the task in less than 3 minutes, with an additional 0.5 minutes each for take-off and landing. Using an object detector for defect detection, such as YOLOv9, the system can achieve an mAP
 ${{\rm{\;\!}}^{50}}$
of approximately 0.70 to 0.75 in the identification of various artefacts when using, as an example, the approach suggested by Suvittawat et al. [Reference Suvittawat128]. Consequently, the use of drones can eliminate the need for work-stand logistics, allow technicians to remain on the ground, provide digitised task card entries that seamlessly integrate with the M&E system, and reduce overall time to less than 4 minutes per side, which is a reduction in time of more than 50% compared to the manual approach. In addition, it eliminates the possibility of transcription error in the report, and feedback would be filled in automatically as the output of the procedure. The last step of signing the Part-145 release is still a responsibility of the inspector, keeping the human in the loop, and ensuring the control of the procedure. This example aptly demonstrates the digital transformation of a traditionally manual procedure within the smart hangar, enhancing the working environment for maintenance engineers and involving them in the decision-making process.
${{\rm{\;\!}}^{50}}$
of approximately 0.70 to 0.75 in the identification of various artefacts when using, as an example, the approach suggested by Suvittawat et al. [Reference Suvittawat128]. Consequently, the use of drones can eliminate the need for work-stand logistics, allow technicians to remain on the ground, provide digitised task card entries that seamlessly integrate with the M&E system, and reduce overall time to less than 4 minutes per side, which is a reduction in time of more than 50% compared to the manual approach. In addition, it eliminates the possibility of transcription error in the report, and feedback would be filled in automatically as the output of the procedure. The last step of signing the Part-145 release is still a responsibility of the inspector, keeping the human in the loop, and ensuring the control of the procedure. This example aptly demonstrates the digital transformation of a traditionally manual procedure within the smart hangar, enhancing the working environment for maintenance engineers and involving them in the decision-making process.
Within the commercial industry, certain companies provide specialised services for inspecting drone aircraft. The concept proposed by Airbus through its Hangar of the Future initiative highlighted that integrating a ground platform with drone technology can significantly reduce the data acquisition time from 2 hours to 15 minutes [Reference Jess101]. Half a decade later, Airbus has officially included Donecle drones in its Aircraft Maintenance Manual (AMM), specifically to perform lightning inspections on A320 family aircraft [Reference Canaday129]. This indicates the endorsement of both the EASA and FAA, which is expected to lead to the overcoming of regulatory obstacles worldwide. In less than 45 minutes, the system inspects all upper areas of the aircraft to identify lightning strikes [56]. Mainblades asserts that, in contrast to the typical time required for a manual visual assessment of a widebody aircraft, their drone inspection method significantly reduces the time required by a factor of eight [Reference Mila ter Mors130]. This reduction in inspection time leads to resource savings in excess of £6,600 per aircraft, while the operational benefit, estimated through the lease cost savings from reduced downtime, exceeds £15,800. Applying industry-standard averages for out-of-service costs of aircraft, the operational benefit per widebody inspection would amount to £165,000. Thus, implementing a comprehensive strategy that incorporates the smart hangar infrastructure and facilitates robotic-assisted maintenance can provide substantial financial advantages while enhancing flight safety.
7.0 Advanced technologies for defect detection and human factors
Machine vision has evolved significantly, moving from traditional methods to advanced DL techniques. This evolution has greatly enhanced the detection capabilities of defects in various industries, including aircraft maintenance [131]. Numerous examples exist in which different algorithms are used to identify artefacts in aircraft inspections. After 2010, when the research community began to experience an AI spring, DL models, CNNs, were developed to identify features directly from raw images through training on large datasets [Reference O’ Mahony132]. This process eliminates the need for manual feature definition.
Visual inspection is considered one of the simplest non-contact NDT methods. More than 80% of the inspections in large transport aircraft have been reported to be visual inspections [Reference Spencerm133]. The usability and popularity of the visual part makes it the perfect candidate for employing advanced machine vision techniques for automated defect detection. Thermography, as an imaging approach, has attracted much interest in applying deep neural networks to identify defects, mainly in composite materials. Another NDT technique used in aircraft inspection is phased array ultrasonic testing (PAUT), which identifies small defects in composite materials and ensures structural integrity. However, this is a contact NDT technique, and it is more challenging to use ground-robotic platforms unless there is a manipulator/cobot or a crawler (Table 3).
Comparison summary of different detection approaches

The most frequent defects in aircraft skin include impact damage, dents, buckles, fatigue cracks, scratches, paint detachment, missing parts, lightning strikes and voids. Avdelidis et al. [Reference Avdelidis134], in cooperation with TUI Airlines, developed an approach based on CNN to identify seven types of defects (missing paint, dents, lightning strikes, etc.). The data set (576 images) was limited, but it achieved approximately 80% accuracy. Plastropoulos et al. [Reference Plastropoulos135] in a similar experiment focused on dents using a dataset of 1,518 images. Using Efficientdet-d1, they managed to get 71% average precision for dents. Ding et al. [Reference Ding136] progressed further and tried to perform image segmentation on detected defects. They used Mask Scoring R-CNN, which introduces an attention mechanism, a feature fusion module and a custom classifier head. They focused on clearly visible defects, such as paint detachments and scratches, instead of the challenging ones, such as dents. Their dataset was also very limited (276 images), but they achieved an average precision of up to 87%. Boyuk et al. [Reference Boyuk, Duvar and Urhan137] reviewed visual inspection methods using DL approaches. They compared YOLO and Faster R-CNN-based approaches to detect dents, cracks and scratches on the skin of the aircraft. They mentioned that YOLO is more suitable due to its speed and compatibility with restricted computational resources in mobile computing, and they assessed the accuracy of CNN-based methods. Recent progress extends those advantages to fully on-board real-time operation. Wang et al. [Reference Wang138] developed an attention-enhanced YOLO variant (TunnelScan) on a quad rotor while achieving a mAP0.5 of 86.1% in multiple defects in the tunnel lining (cracks, spalling, leaks, bolt connection) and a detection speed of 19.6fps. Their lightweight GLUConv and ms-FPN backbone addresses the same small target/large surface challenge seen in aircraft skin inspection, suggesting that importing such architectures could increase detection throughput without increasing the cognitive load on inspectors, thus supporting the human-centric aims of Industry 5.0. Overall, the following main points appear to hold:
-
• Mask-RCNN achieves significant accuracy in stationary conditions, yet YOLO-based single-stage detectors match this performance and operate in real time, which is essential for integration with drones or collaborative robots.
-
• Most DL approaches consistently exceed the accuracy of approximately 68% typically achieved by manual visual examination, highlighting the advantages of automating initial defect screening.
-
• Reported datasets remain small (1,500 images max). There is a need for a larger data set and shared benchmarks.
Using active thermography approaches, internal defects such as voids, delamination, or even liquid inside the internal composite (i.e. honeycomb) can be revealed. D’Orazio et al. [Reference D’Orazio139] demonstrated that the use of neural networks in a sequence of images can identify defects in different types of composite materials (honeycomb, Nomex and Syncore). In terms of thermal sources, they used Xenon quartz lamps to produce quasi-uniform heating. The accuracy was very high, most of the time 100%, but the architecture is rather outdated considering the use of a 3-layer fully connected neural network. Saeed et al. [Reference Saeed140] presented an approach to estimate the depth of a defect using a combination of CNN and a deep feed-forward neural network (DFF-NN), the first to draw the boundary box and the second to estimate the depth. In the experiments, a 3D printed CFRP coupon was used with many different sizes and depth artefacts. Their setup included halogen lamps as a heating source. Although they do not mention the overall performance metrics of the testing phase, the description of the results is encouraging that methods can be further developed to achieve better results. Visual inspection is part of almost all quality control procedures and the aviation industry is one of these. Humans perform that inspection and sign off the reports. See et al. [Reference See141], in their analysis, mentioned that based on Ref. (Reference Drudy and Fox142) the error rates in complex inspections could range from 20% to 30%. Drudy et al. [Reference Drury, Spencer and Schurman143] suggested in their research that the level of error in visual inspection of aircraft is 32%, which could be justified because inspection occurs in the field and not in a structured environment (such as a factory or laboratory) and, in addition, the checks are not always trivial.
As was mentioned in the incentives for moving towards Industry 5.0, humans are at the centre, and automation needs to be integrated seamlessly as an intelligent tool. Consequently, in this revised capacity, humans might not be involved in the beginning stages of the process but are tasked with making the ultimate decision, fundamentally changing their responsibilities [Reference See144]. Elevated responsibility implies that maintaining alertness becomes increasingly crucial. The individual is now in charge of monitoring the system to guarantee its ongoing operation and may perform periodic accuracy checks, necessitating more active involvement in the process. In this case, human-machine interfaces (HMI) and graphical user interfaces (GUI) have become increasingly important in translating information into a detailed, plausible and accurate representation. Imagine a human inspector screening defects on aircraft skin without high-resolution monitors or getting poorly focused images. There are also efforts to maintain awareness and motivation at high levels by introducing gamification concepts in repetitive boring tasks [Reference Oliveira145]. So, it might initially seem that humans have more manageable tasks to perform, but this just removes the laborious part of physical activity; the responsibility of deciding and managing the procedure remains the same, leaving space for errors and inaccuracies.
8.0 Conclusions
The integration of advanced robotics and technologies into aircraft maintenance and inspections represents a transformative shift in the maintenance, repair and overhaul industry. Unlike current reviews in the literature, this comprehensive review, apart from presenting the potential robotic approaches in the MRO landscape, has moved one step forward by examining interoperability within current aviation systems and suggests directions in designing new robot-friendly hangars.
The transition from manual to automated inspection processes requires not only technological advancements, but also a reconfiguration of existing workflows to accommodate human-machine collaboration. The principles of Industry 5.0, with their focus on human centricity and sustainability, underscore the importance of designing intelligent tools that augment human expertise rather than replace it. This approach ensures that automation supports technicians in performing repetitive or hazardous tasks while maintaining their critical decision-making role in the maintenance process. For instance, the aileron inspection process was transformed by initially mapping out the old legacy workflow, followed by showcasing the automated version.
Despite these advancements, several challenges remain. The integration of robotic systems with legacy IT infrastructures, the high cost of initial implementation and resistance to change within the workforce are significant barriers that must be addressed. Furthermore, the development of new hangars that are friendly to robotic deployments but are safe to work along with humans and safe to exchange data and monitor is essential for widespread adoption. In addition, the shift from manual inspections to entirely robotic and data-centric operations can only be achieved successfully if cybersecurity protocols are developed alongside safety and productivity goals, maintaining the trustworthiness of the enlarged data perimeter.
The journey to achieving fully automated aircraft inspections is undoubtedly intricate and involves multiple aspects. The potential benefits, ranging from improved operational efficiency to improved safety and sustainability, make this transition a necessity. Future research should focus on addressing existing gaps in technology integration, fostering industry collaboration for standardisation and ensuring that human factors remain central to this digital transformation.


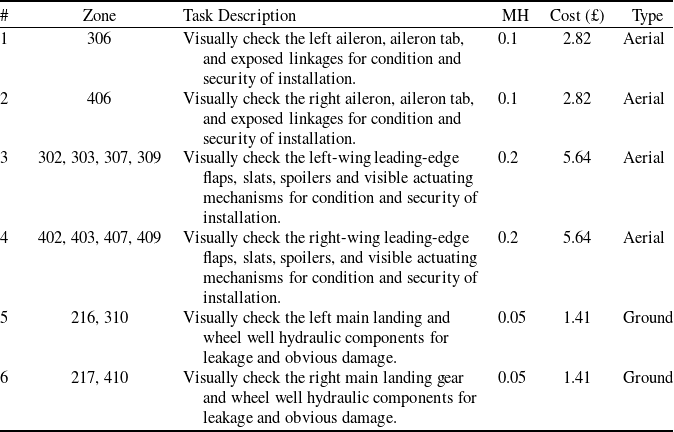







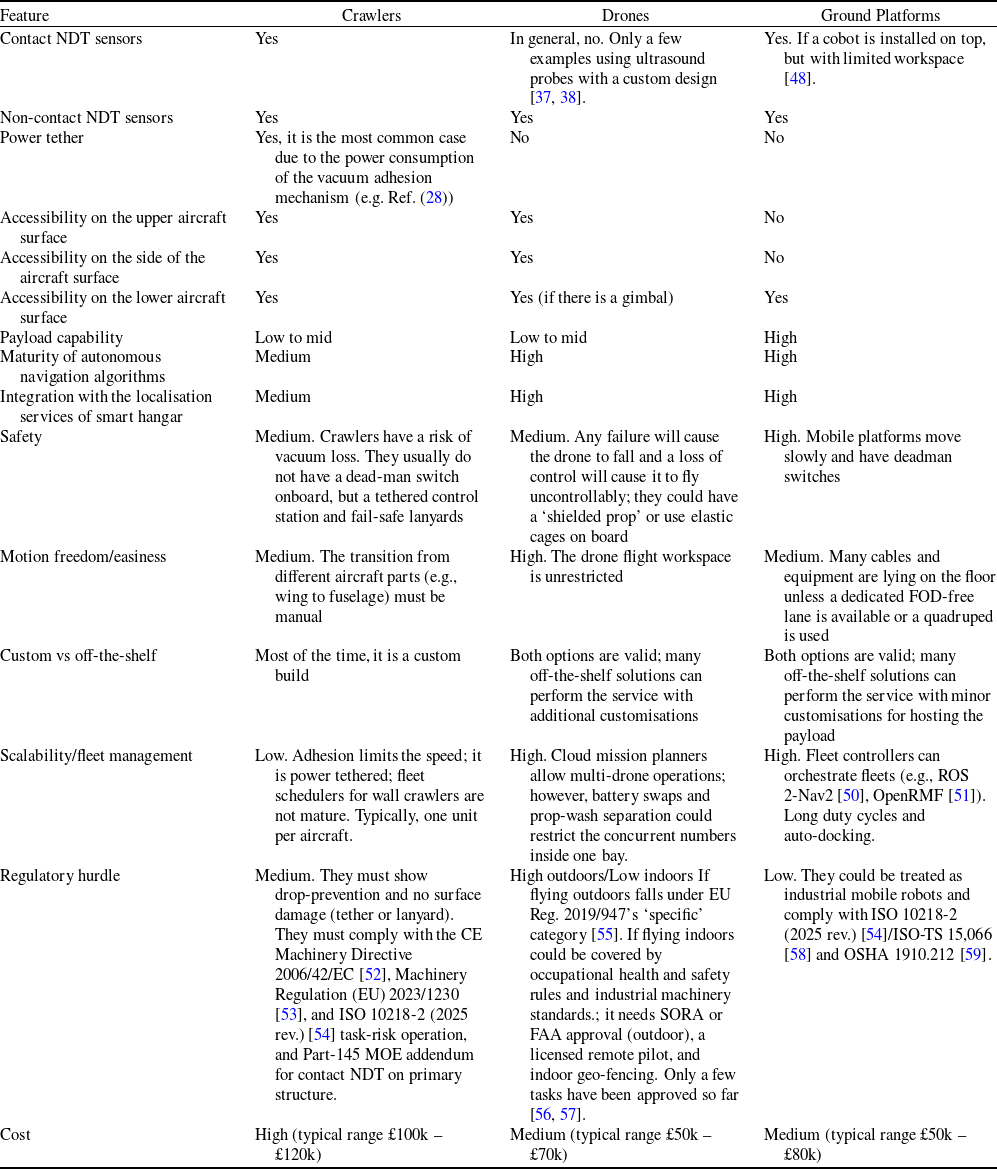

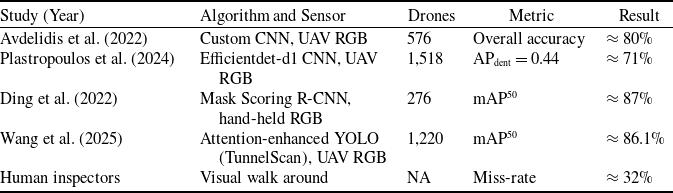

 Open access
Open access