

Introduction
Hovercrafts move on a cushion of air and require smooth and relatively flat surfaces. Their greatest use is over near level surfaces such as water and mudflats, but less so over ice or surfaces of hard-blown snow (Figure 1). The air cushion reduces friction and gives a smooth ride, while the disadvantage of imprecise vehicle control is partly offset by the generous space available in these environments. A few years after the first full-scale successful hovercraft trials in 1959, Sir Vivian Fuchs wrote a paper in the Polar Record on the topic Hovercraft in polar regions. He stated: Polar travellers have been anxiously awaiting the stage of development which would make it practical to experiment in the Arctic and Antarctic (Fuchs, Reference Fuchs, Priestly, Adie and de Q Robin1964, Reference Fuchs1966). Ten years later, the hovercraft issue was discussed at the meeting of the Scientific Committee of Antarctic Research in Argentina, and a small open hovercraft (payload 360 kilos) was introduced by New Zealand at the Scott Base in 1977 (Caffin, Reference Caffin1977). Subsequently, Japanese scientists carried out tests of a 2.8 tonnes experimental hovercraft with 0.6 tonnes payload capacity at Syowa Station from 1981–1990, but the activity was not pursued further (Murao, Sadao, Inaba, & Hosaya, Reference Murao, Sadao, Inaba and Hosaya1994). The British Antarctic Survey may have been the first to use small hovercrafts in a field operation in Antarctica (http://www.jameshovercraft.co.uk/hover/tiger4.php). Two Tiger 4 hovercrafts proved useful on the Larsen B ice shelf during the 1987/88 season, where large melt puddles were present, and nearly one thousand kilometres of track were covered.
Griffon hovercraft 2000TD used for polar operations (upper panel). Hovercraft interior with kitchen section and microwave oven (lower left) and seating (lower right).

More robust documentation of the potential of the hovercraft technology in Antarctica has come from trials at McMurdo Station during 1988–1991 with a craft of greater carrying capacity, comfort and terrain clearance (Cook, Reference Cook1989; Dibbern, Reference Dibbern1989). The craft was a 10-metre-long licence-built Griffon TD 1500 powered with a 199 hp engine, giving 0.43 m hover height and 1.5 tonnes payload capacity. The vehicle was designed as a “pickup truck”-like combined passenger and cargo carrier, supporting scientific programmes on sea ice and on the ice shelf. Although the experience was very positive (Cook, Reference Cook1989), the activity was unfortunately terminated due to circumstances unrelated to craft performance (https://www.southpolestation.com/trivia/history/hovercraft.html).
We may look to the north polar region with its challenging sea ice environment, where Hall and Kristoffersen (Reference Hall and Kristoffersen2009) first addressed the issue of an alternative low-cost logistic approach for smaller scientific programmes (Hall & Kristoffersen, Reference Hall and Kristoffersen2025; Kristoffersen & Hall, Reference Kristoffersen and Hall2014). The scientific achievements have been communicated in over 20 publications to date (Hall & Kristoffersen, Reference Hall and Kristoffersen2025, Supplementary Material). In contrast, the southern polar continent, with its documented hovercraft-friendly environment (Cook, Reference Cook1989), has seen no attempted use of hovercrafts during the past 35 years. To restart the collective learning process, the polar operator White Desert Ltd. and the hovercraft owner Blodgett-Hall Polar Presence LLC agreed to mutually explore and document the capabilities and limiting factors for hovercraft travel and science support in Antarctica. Here, we communicate the main lessons learned to add to the experience reported from McMurdo Station by Cook (Reference Cook1989).
The hovercraft Sabvabaa
The hovercraft R/H Sabvabaa (from the Inuit language, meaning …….“flows swiftly over it”) was built in 2007 by Griffon Hovercraft Ltd. in Southampton, UK, for exclusive use as a research platform over sea ice in the Arctic Ocean (Hall & Kristoffersen, Reference Hall and Kristoffersen2009). The craft is 11 m long, 6 m wide and weighs 5.6 tonnes (Figure 1). The model 2000TD Mark 3 hovercraft has a 2.1 m wide double hull of marine-grade aluminium and is powered by a single water-cooled 440 horsepower diesel engine. Propulsion is by a reversible propeller. The stated hover height is 0.73 m and payload capacity 2.2 tonnes. Usable cabin area is 12 square metres. More details are given on the website https://web.geo.uib.no/polarhovercraft/.
Past Arctic achievements during 2008–2021 involved >24.000 km of travel, including 5.300 km over sea ice and a 12-month, 2200 km long ice drift in the central Arctic Ocean (Hall & Kristoffersen, Reference Hall and Kristoffersen2025; Kristoffersen, Tholfsen, Hall & Stein, Reference Kristoffersen, Tholfsen, Hall and Stein2016).
Deployment to Antarctica
The hovercraft with side-decks folded up (11 m long, 2.5 m wide and 3.5 m high) was shipped as deck cargo on the icebreaker SA Agulhas II from Cape Town to the SANAE loading area at 70o 16’ South, 002o West (Figure 2). Here, the craft (8 tonnes) was lifted onto the ice shelf on 26 December 2022 and readied for operation.
Area of operation (left) and actual tracks made (red line, right panel).

All hovercraft movements during the first two seasons were travel-related to moving White Desert personnel on the Fimbul Ice Shelf, and the total distance covered was 1377 km. The last (2024/25) season was devoted to an ice radar (580 km) and seismic survey (160 km) of the Nivl Ice Shelf (012o East) at the initiative of the Indian Antarctic Program, National Centre for Polar and Ocean Research, India, with a total distance of 2660 km travelled (Figure 2).
Tests
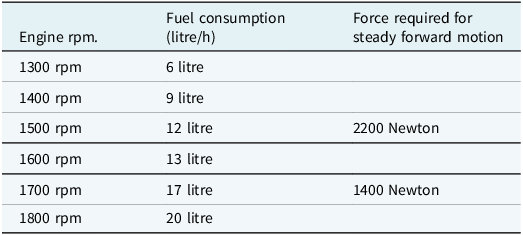
In general terms, about 40% of the hovercraft’s engine power is used for lift and 60% for propulsion. The hovercraft starts to lift at 1150 engine revolutions per minute (rpm), and normal cruise is made at about 1700 rpm with a ground clearance of about 0.5 m. We monitored the fuel consumption required for hover, and measured the force required to move the craft at a steady, slow speed (dynamic friction) over the surface of hard-blown snow (Table 1). The craft hovering at ca. 0.5 m above the snow was pulled by a skidoo, and the force was measured by a load cell. To move the craft (8 tonnes) on its air cushion required a force of 1400 Newton, which implies a coefficient of dynamic friction = 0.0175. This is about half the friction coefficient for skis against snow (Kondo, Hirose, Saito & Doki, Reference Kondo, Hirose, Saito and Doki2015; Lang & Dent, Reference Lang and Dent1982).
Test results

Fuel consumption
Low surface friction relates directly to fuel consumption. Instantaneous fuel consumption could be monitored from a digital flow metre indicator on the dashboard, while a more representative average was derived from the total distance travelled as indicated by the navigation display and the quantity of fuel consumed. In general, driving over the hard-blown snow surface on the ice shelf required a fuel consumption where the numbers for the speed in km/h were roughly equal to the number of litre pr. hour being consumed, that is, <1 litre/km. An average for the first 300 km of driving on the ice shelf gave the same value <1 litre/km (0.8). We were informed by the operator of a Pisten Bully track vehicle that the 190 km transit from the depot on the ice shelf at 70o 16’ South, 002o West to the SANAE station with no cargo, had consumed 350 litres, that is, 1.85 litres/km. Also, a Basler aircraft mechanic informed us that the Basler DC-3 cruising at 170 knots draws about 850 litres/h, that is, 2.7 litres/km.
Speed of travel
The hovercraft lift is determined by the engine rpm, while the forward thrust is independently controlled by the adjustable propeller pitch. The speed of comfortable hovercraft travel depends on the wavelength and amplitude of the snow dunes (Poizat et al., Reference Poizat, Picard, Arnaud, Narteau, Amory and Brun2024; see also https://oceanographydigital.tos.org/flip-book/110286/2289254/page/34).
Surface undulations a few metres across are efficiently smoothed out by the air cushion, but as the speed increases, snow dunes of apparent wavelengths equal to and longer (> 11 m) than the length of the craft become significant. At high speeds, the front skirt segments may temporarily lose contact with the snow surface as the craft moves past the crest of a dune, the lift is reduced, and the result is a pitching motion. In general, wind-blown snow features aligned with the direction of travel are comfortably transited at a speed of 40–60 km/h (Figure 3). Speeds up to a maximum of 83 km/h were tested. When dunes trend perpendicular to the direction of motion, a speed of 20–40 km/h, is more comfortable to avoid the vertical motion of the craft coming out of phase with the undulating snow surface. The fact that a cup of coffee rests safely on a table in the hovercraft cabin is of some practical importance. The imprint of an air cushion on hard-blown snow appears as barely visible millimetre-scale streaks.
Hovercraft travel log for moving from the grounding line up the Antarctic ice sheet at 008o E. (upper panel) and along the ice shelf from 012o E to 002o W in Dronning Maud Land (lower panel).

Endurance
The low fuel consumption and the payload capacity imply that this Griffon 2000TD hovercraft has an endurance of more than 1000 kilometres plus an estimated 30% margin, assuming personnel and equipment represent a load of < 1 tonne.
Limitations on manoeuvrability
A craft riding on a low-friction air cushion responds very fast to the position of the air rudder behind the propeller, but the actual craft trajectory is determined by the craft’s moment of inertia. For this reason, the light contrast for terrain definition is extremely important in the Arctic sea ice environment with numerous obstacles (Kristoffersen & Hall, Reference Kristoffersen and Hall2014). On the flat snow surface on the Antarctica ice shelves with no obstructions, however, it is possible to drive under nearly white-out conditions, provided there is a reference feature on the horizon or in a cloud formation above.
Sidewind
The motion of a hovercraft on a low-friction air cushion is very susceptible to side-wind as the exposed cabin, propeller duct and skirt area represent a cross-section of about 25 square metres. The cross-track wind force must be compensated by a component of forward thrust, which leads to partial sideways motion. In extreme cases, this may be as much as 45 degrees relative to the direction of motion. However, in an environment like Antarctica’s ice shelves, where potential obstacles are far apart, this does not present a problem.
Inclines and altitude
The Griffon 2000TD hovercraft travelled up the incline (average 4%) from the grounding line up on the Antarctic Ice sheet at about 08o East with an average speed of about 30 km/h (Figure 3). This suggests a dynamic thrust of the order of 3000 Newton to overcome friction and the gravity component. The upslope transit revealed a limitation in the versatility of a conventional hovercraft in Antarctica as lift became progressively reduced with increasing altitude. At about 880 m above sea level, the reduction in air density is ca. 15%, and the craft became effectively grounded and had to return (Figures 2 and 3).
Going down slope may present a challenge in speed and attitude control. The efficiency of the air rudder behind the propeller depends on the amount of applied thrust, but increased thrust increases the speed. Over slopes of hard-blown snow, the speed can be reduced by the combination of lowering the lift to increase friction and reversing the thrust. This may not be sufficient over the icy surface often present as the grounding line is approached. An effective solution to retard down-slope motion is by rotating the craft 180 degrees to the direction of travel and applying full forward thrust in the up-hill direction. This can be done safely as no obstacles are present.
Noise
The noise level is an important aspect of travel comfort. We measured an average noise level of 68 dB inside the cabin during transit. This is comparable to the noise in a passenger car travelling on a highway at 80 km/h. For reference, we also measured the noise level in the caboose in the back of a Pisten Bully track vehicle (80 dB) and in a Twin Otter at cruising level to be 92 dB. As the scale of relative sound energy levels is logarithmic, a ten-fold increase in noise amplitude is equal to 20 dB.
Safety
A hovercraft provides accommodation, communication and first aid facilities for its crew in case of any arising technical, weather or personal accident issues. Although the travel may be well planned based on satellite imagery, unexpected ice cracks are an ever-present issue. In this case, the ground pressure and speed of travel are important safety factors. The Griffon 2000TD hovercraft presents a load of about 8–9 tonnes on a footprint of about 60 square metres, which equals about 15% of the ground pressure per unit area of a walking adult in polar gear.
Also, the speed of motion across open ice cracks is important. To simulate crack crossings, we made tests across 0.5 m deep snow trenches, 0.5 and 1 m wide. Crossings with the 11 m long craft at speeds as low as 10 km/h gave only a minor loss of lift across a 1 m wide trench (Figure 4). The effect of hovercraft speed has been extensively tested by Abele (Reference Abele1966) on the Greenland ice sheet. Here, a 6 m long test craft crossed trenches of widths equal to 25% of the craft length at 40 km/h, with relative ease.
Crossing a snow trench to test the loss of lift capacity.

Snowstorms
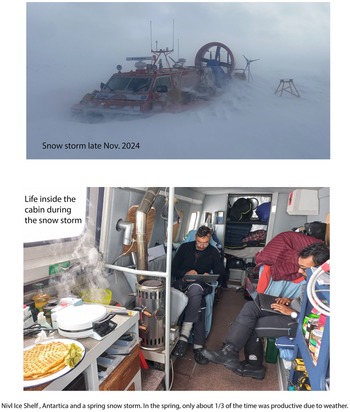
A hovercraft parked with the front against the prevailing wind direction presents a safe haven during snowstorms (Figure 5). The cabin allowed continuous occupancy of up to 6 persons for days (2 beds, 4 reclining chairs). The critical issue is to avoid the engine bay being filled with snow. A tarpaulin cover is necessary, but it will prohibit the use of the main engine to charge the batteries. Charging may then be via a portable Honda 2 kW generator or a 400 W windmill, where the latter also eliminates any need for outside activity during the most intense periods of blowing snow.
Life in the hovercraft during a snowstorm.

Winter storage
As with other unsheltered vehicles in Antarctica, the hovercraft may be parked on top of a snow ramp (> 2 m high) in preparation for the winter season. With the front against the prevailing wind direction and the engine bay and all imaginable small orifices sealed, winter storage poses no problem except work needed to remove the snow in the spring (Figure 6).
Hovercraft storage on the ice shelf at the start and end of winters.

The hovercraft as science platform
A hovercraft can be considered a scaled-down research vessel where the suite of scientific equipment has been redesigned or selected with consideration of weight (Kristoffersen & Hall, Reference Kristoffersen and Hall2014).
The Griffon 2000TD craft was equipped with a Blue System ice radar towed behind the craft, as a side deck-mounted position degraded the outgoing radar pulse. The radar frequency used was 20 MHz, which yielded a penetration of about 300 m, roughly equivalent to the last 5000 years of snow accumulation. Seismic reflection measurements on the ice shelf were achieved using the Poulter method, where the energy from a sound source is most efficiently transferred into the subsurface if the source is above the snow rather than buried in the snow (Poulter, Reference Poulter1950). The sledge with the suspended seismic source made a 15 cm deep groove in the snow to shield the towed geophones from wind noise. The seismic reflection information was produced at 2 km/h with shot points at 100 m spacing, where the engine had to be turned off to reduce the ambient noise. The procedure gave ice thickness as well as the water depth and possibly the thickness of sub-bottom glacial sediments (Figure 7). This approach was implemented in cooperation with the Indian Antarctic Program on the Nivl Ice Shelf north of the Indian research station Maitri at about 10o East (Figures 2 and 7). A total of 560 km of ice radar measurements and 130 km of seismic reflection data were acquired.
Hovercraft survey strategy (left) with ice radar and seismic images and their interpretation (right).

A hovercraft designed for Antarctica
The experiences documented so far suggest air cushion transport has an untapped potential in Antarctica. Antarctic ice shelves and the ice sheet are, in practical terms, equivalent to terra firma. Since a standard hovercraft is also designed for operations over water, space is made available for floatation tanks. A second and more important constraint of the Griffon 2000TD design is that the hull and cabin are to be < 2.5 m wide. This is to allow for relocation of the craft over land via public roads without the need for a special transport permit. As craft stability requires a wide air cushion, the Griffon 2000TD is equipped with 1.4 m wide side-decks which can be folded up during transport on a trailer over land. All the above considerations are irrelevant for an Antarctic hovercraft version. The main benefit will be an opportunity to increase the cabin area by more than 100%, but at a slight penalty in increased hull weight. Also, an Antarctic version should have increased lift capacity to facilitate operations at altitudes higher than many of the permanent national research stations, i. e., minimum 1500 metres above sea level. In this respect, we note a hovercraft test operation on the Greenland ice cap in 1964 at an altitude of 1886 m (Abele, Reference Abele1966).
Conclusions
We have carried out trials on the Fimbul Ice Shelf during two seasons and on the Nivl Ice Shelf for one season with the intent to explore and document the capabilities and limiting factors for operating a hovercraft platform for travel and scientific field work in Antarctica. The medium-sized hovercraft (payload 2.2 tonnes) moves on an air cushion (practical hover height 0.5 m) with a ground pressure pr. unit area equivalent to about 15% of an adult person. Moving over the hard-blown snow on the ice shelf requires a fuel consumption of < 1 litre/km or half of the consumption required for hovercraft travel over a flat ocean surface. Safe speeds of travel on an ice shelf are about 40–60 km/h when wind-blown surface features are in the direction of travel and about 20–40 km/h when they are perpendicular. The estimated operational distance for our Griffon 2000TD craft is +1000 km for a payload of <1 tonnes (personnel and equipment). However, this standard hovercraft design is limited by altitude, as reduced air density gradually diminishes the lift capacity to zero at about 880 m above sea level. Overall, our results fully support the experience from the initial trials at McMurdo Station 1988–91; factors like fuel economy, safety and environmental impact suggest hovercrafts have potential as supplementary platforms for travel and science missions on the ice shelves surrounding the Antarctic continent.
Acknowledgement
The hovercraft Sabvabaa was provided by Blodgett-Hall Polar Presence LLC, Jerusalem, Israel and full logistic support for the Antarctic operation by White Desert Antarctica, Cape Town, South Africa. We thank the White Desert staff for excellent support during all stages of this endeavour. The Nivl Ice Shelf geophysical survey was organised by Dr. Vikram Goel and made possible by generous logistic support from the Indian Antarctic Program, National Centre for Polar and Ocean Research, Goa, India.
Competing interests
PW is CEO of White Desert Antarctica, JKH, YK and JEL declare no conflicting interests.







 Open access
Open access