




1. Introduction
In 1917, Kakeya posed a question now known as the Kakeya needle problem: Among sets, in which a line segment of unit length can be fully rotated, which one has minimal area? Besicovitch [Reference Besicovitch1] showed that there is no such minimum, the area of such a set can be arbitrarily small. In 1971, Davies [Reference Davies4] demonstrated that more is true: finitely many parallel line segments can be simultaneously rotated, in an arbitrarily small area. Our main result is even stronger:
Theorem 1.1. For every  $\varepsilon \gt 0$ there exists a continuous motion of the unit square during which every initially vertical line segment sweeps at most
$\varepsilon \gt 0$ there exists a continuous motion of the unit square during which every initially vertical line segment sweeps at most  $\varepsilon$ area, while the square does a full rotation.
$\varepsilon$ area, while the square does a full rotation.
A set in  ${\mathbb{R}}^n$ is said to have the Kakeya property if it has two positions, between which the set can be continuously moved in an arbitrarily small volume [Reference Csörnyei, Héra and Laczkovich3]. It is said to have the strong Kakeya property if this applies to any two of its positions.
${\mathbb{R}}^n$ is said to have the Kakeya property if it has two positions, between which the set can be continuously moved in an arbitrarily small volume [Reference Csörnyei, Héra and Laczkovich3]. It is said to have the strong Kakeya property if this applies to any two of its positions.
It is easy to show that the result of Davies [Reference Davies4] implies that a finite union of parallel line segments possess the strong Kakeya property. In the same paper, he showed that the segments must be parallel, two non-parallel segments do not have the strong Kakeya property.
Much effort has been put into characterizing sets in  ${\mathbb{R}}^2$ with the Kakeya property and the strong Kakeya property. M. Csörnyei, K. Héra, and M. Laczkovich [Reference Csörnyei, Héra and Laczkovich3] showed that closed connected set with the Kakeya property must be a subset of a line or circle. K. Héra and M. Laczkovich [Reference Héra and Laczkovich6] proved that short enough circular arcs do in fact possess the strong Kakeya property. Currently, the strongest version of this statement is due to A. Chang and M. Csörnyei [Reference Chang and Csörnyei2]. They generalized the result of Davies in another direction by showing that a countable union of parallel line segments, which is bounded and has finite total length, can be rotated in an arbitrarily small area. It is still unknown whether all non-complete circular arcs possess the strong Kakeya property.
${\mathbb{R}}^2$ with the Kakeya property and the strong Kakeya property. M. Csörnyei, K. Héra, and M. Laczkovich [Reference Csörnyei, Héra and Laczkovich3] showed that closed connected set with the Kakeya property must be a subset of a line or circle. K. Héra and M. Laczkovich [Reference Héra and Laczkovich6] proved that short enough circular arcs do in fact possess the strong Kakeya property. Currently, the strongest version of this statement is due to A. Chang and M. Csörnyei [Reference Chang and Csörnyei2]. They generalized the result of Davies in another direction by showing that a countable union of parallel line segments, which is bounded and has finite total length, can be rotated in an arbitrarily small area. It is still unknown whether all non-complete circular arcs possess the strong Kakeya property.
Let  $V$ be the set of planes that have a
$V$ be the set of planes that have a  $45^\circ$ angle with the
$45^\circ$ angle with the  $\{y=0\}$ plane. In Section 2, we will prove the following lemma.
$\{y=0\}$ plane. In Section 2, we will prove the following lemma.
Lemma 1.2. There exists a closed set  $A$ in
$A$ in  ${\mathbb{R}}^3$, which is the union of planes in
${\mathbb{R}}^3$, which is the union of planes in  $V$ at a bounded distance from the origin, contains a translate of every plane in
$V$ at a bounded distance from the origin, contains a translate of every plane in  $V$, and intersects every plane of the form
$V$, and intersects every plane of the form  $\{y=t\}$ in a set of measure zero.
$\{y=t\}$ in a set of measure zero.
The proof relies on a duality argument and utilizes the construction of Talagrand [Reference Talagrand9], for an English description see Appendix A. in [Reference Hansen7].
Lemma 1.2 is closely related to the question of rotating a square. The connection can be seen if we think of the plane as the  $\{y=0\}$ plane in
$\{y=0\}$ plane in  ${\mathbb{R}}^3$ and raise every vertical segment of the unit square by its distance from the origin. During the motion of the unit square, the motion of each initially vertical segment corresponds to the motion of the raised rectangle at a given height.
${\mathbb{R}}^3$ and raise every vertical segment of the unit square by its distance from the origin. During the motion of the unit square, the motion of each initially vertical segment corresponds to the motion of the raised rectangle at a given height.
Thus Lemma 1.2 can be thought of as giving a discontinuous motion of the unit square, during which it achieves every direction. In Section 3, we turn this motion into a continuous one and prove Theorem 1.1.
Section 4 will discuss how Theorem 1.1 can be applied to show that certain sets in  ${\mathbb{R}}^3$ have the strong Kakeya property. To demonstrate the connecting idea, consider the lateral surface of a cylinder with an axis parallel to the
${\mathbb{R}}^3$ have the strong Kakeya property. To demonstrate the connecting idea, consider the lateral surface of a cylinder with an axis parallel to the  $z$-axis. If we look at this set from the direction of the
$z$-axis. If we look at this set from the direction of the  $y$-axis, then we see a subset of a square. We can apply a motion given by Theorem 1.1 that rotates this square by
$y$-axis, then we see a subset of a square. We can apply a motion given by Theorem 1.1 that rotates this square by  $90^\circ$. This will define a motion on the surface as well. During the motion of the surface, the area swept in the
$90^\circ$. This will define a motion on the surface as well. During the motion of the surface, the area swept in the  $\{y=h \}$ plane will be at most the sum of the areas swept by the segments in this plane, which is less than
$\{y=h \}$ plane will be at most the sum of the areas swept by the segments in this plane, which is less than  $\varepsilon$ for each segment. Therefore, this motion moved the surface of the cylinder with an axis parallel to the
$\varepsilon$ for each segment. Therefore, this motion moved the surface of the cylinder with an axis parallel to the  $z$-axis to one with an axis parallel to the
$z$-axis to one with an axis parallel to the  $x$-axis in an arbitrarily small volume. This idea applies to a much wider family of sets, not just the lateral surface of a cylinder.
$x$-axis in an arbitrarily small volume. This idea applies to a much wider family of sets, not just the lateral surface of a cylinder.
We say that a compact set  $K\subset {\mathbb{R}}^3$ is cylinderlike if there exists
$K\subset {\mathbb{R}}^3$ is cylinderlike if there exists  $n\in {\mathbb{N}}$ such that for almost all
$n\in {\mathbb{N}}$ such that for almost all  $t$ the set
$t$ the set  $\{y=t\}\cap K$ can be covered by
$\{y=t\}\cap K$ can be covered by  $n$ vertical lines. We say that a compact set
$n$ vertical lines. We say that a compact set  $K$ is cylinderlike from direction
$K$ is cylinderlike from direction  $d$ if there is an orthogonal coordinate system, in which the
$d$ if there is an orthogonal coordinate system, in which the  $y$-axis is parallel to
$y$-axis is parallel to  $d$, and
$d$, and  $K$ is cylinderlike.
$K$ is cylinderlike.
Theorem 1.3. If  $K$ is cylinderlike from two non-parallel directions
$K$ is cylinderlike from two non-parallel directions  $d_1, d_2$, then
$d_1, d_2$, then  $K$ has the strong Kakeya property.
$K$ has the strong Kakeya property.
It follows that the union of a finite number of parallel lateral cylinder surfaces possesses the strong Kakeya property. The above theorem also implies that a compact subset of any two planes has the strong Kakeya property.
More general examples of such sets are given at the end of Section 4.
2. Planes of certain angle: proof of Lemma 1.2
This section will exclusively deal with the proof of Lemma 1.2.
Let  $a\cdot b$ denote the standard dot product of
$a\cdot b$ denote the standard dot product of  $a$ and
$a$ and  $b$. For a vector
$b$. For a vector  $v$ let
$v$ let
 \begin{equation*}p_v(X)~=~\{x \cdot v~|~x~\in~X\}.\end{equation*}
\begin{equation*}p_v(X)~=~\{x \cdot v~|~x~\in~X\}.\end{equation*} It is clear that it is sufficient to construct a set fulfilling the conditions, with the exception that it only contains planes in  $V$, whose directions form an interval.
$V$, whose directions form an interval.
We will use a duality argument and encode planes with points of  ${\mathbb{R}}^3$. Similar encodings are often used in planar cases, see, for example, [Reference Kátay8],[Reference Falconer5]. To the point
${\mathbb{R}}^3$. Similar encodings are often used in planar cases, see, for example, [Reference Kátay8],[Reference Falconer5]. To the point  $(a,b,c)$ assign the plane, which contains
$(a,b,c)$ assign the plane, which contains  $(0,0,a)$, has slope
$(0,0,a)$, has slope  $b$ in the
$b$ in the  $y=0$ plane, slope
$y=0$ plane, slope  $c$ in the
$c$ in the  $x=0$ plane. It is easy to see that a point
$x=0$ plane. It is easy to see that a point  $(x,y,z)$ is on the plane corresponding to
$(x,y,z)$ is on the plane corresponding to  $(a,b,c)$ if and only if
$(a,b,c)$ if and only if  $a+bx+cy=z$. Through straightforward calculation, a plane is in
$a+bx+cy=z$. Through straightforward calculation, a plane is in  $V$ when its triple has
$V$ when its triple has  $c^2 - b^2 = 1$.
$c^2 - b^2 = 1$.
2.1. Requirements for our codeset and some basic observations
Let  $K$ be a set of triples, and
$K$ be a set of triples, and  $A$ the union of the corresponding planes. If
$A$ the union of the corresponding planes. If  $K$ is compact, then
$K$ is compact, then  $A$ is closed, and every plane is at a bounded distance from the origin. The point
$A$ is closed, and every plane is at a bounded distance from the origin. The point  $(x,y,z)$ is in
$(x,y,z)$ is in  $A$ if
$A$ if  $K$ contains a triple
$K$ contains a triple  $(a,b,c)$, which satisfies
$(a,b,c)$, which satisfies  $a+bx+cy=z$, meaning
$a+bx+cy=z$, meaning  $K$ has a point in this plane. The set
$K$ has a point in this plane. The set  $(x,y, - ) \cap A$ is
$(x,y, - ) \cap A$ is  $p_{(1,x,y)}(K)$, hence their measure is equal. Hence, if
$p_{(1,x,y)}(K)$, hence their measure is equal. Hence, if  $K$ is such that for all vectors
$K$ is such that for all vectors  $v$ of the form
$v$ of the form  $(1,x,y)$ we have
$(1,x,y)$ we have  $\lambda(p_v(K)) = 0$, then
$\lambda(p_v(K)) = 0$, then  $A$ intersects every vertical line in a set of measure 0. Therefore, it intersects every plane
$A$ intersects every vertical line in a set of measure 0. Therefore, it intersects every plane  $\{y=t\}$ in a set of measure 0. For the directions of the planes in
$\{y=t\}$ in a set of measure 0. For the directions of the planes in  $A$ to form an interval, we need
$A$ to form an interval, we need  $p_{(0,1,0)}(K)$ to be an interval.
$p_{(0,1,0)}(K)$ to be an interval.
Let the 3 coordinates of the space containing  $K$ be
$K$ be  $a,b,c$. By the above argument, in order to prove Lemma 1.2, it is enough to prove the following lemma.
$a,b,c$. By the above argument, in order to prove Lemma 1.2, it is enough to prove the following lemma.
Let  $H= \{(a,b,c) | c^2 - b^2 = 1, c \gt 0\}$.
$H= \{(a,b,c) | c^2 - b^2 = 1, c \gt 0\}$.
Lemma 2.1. There exists a compact set  $K \subset H$ such that
$K \subset H$ such that  $ p_{(0,1,0)}(K)$ is an interval and
$ p_{(0,1,0)}(K)$ is an interval and  $ \lambda(p_{(1,x,y)})(K) = 0$ for all
$ \lambda(p_{(1,x,y)})(K) = 0$ for all  $x,y$.
$x,y$.
The remainder of this section deals with the proof of Lemma 2.1.
2.2. Preliminaries for constructing  $K$
$K$

Let  $f: {\mathbb{R}}^2 \rightarrow H$,
$f: {\mathbb{R}}^2 \rightarrow H$,  $f(a,b)= (a,b, \sqrt{1+b^2})$.
$f(a,b)= (a,b, \sqrt{1+b^2})$.
We will construct  $K' \subset {\mathbb{R}}^2$ such that
$K' \subset {\mathbb{R}}^2$ such that  $K= f(K')$ has the desired properties.
$K= f(K')$ has the desired properties.
For any  $x,y,s$, we have
$x,y,s$, we have  $s \in p_{(1,x,y)}(K)$ if and only if
$s \in p_{(1,x,y)}(K)$ if and only if  $K$ has a point
$K$ has a point  $r$, for which
$r$, for which
 \begin{equation*}r\cdot(1,x,y) = s.\end{equation*}
\begin{equation*}r\cdot(1,x,y) = s.\end{equation*} Such points  $r$ on
$r$ on  $H$ form a curve:
$H$ form a curve:
 \begin{equation*}c_{x,y,s}= \{(s-x\sinh(t)-y\cosh(t),\sinh(t),\cosh(t)):t \in {\mathbb{R}}\}.\end{equation*}
\begin{equation*}c_{x,y,s}= \{(s-x\sinh(t)-y\cosh(t),\sinh(t),\cosh(t)):t \in {\mathbb{R}}\}.\end{equation*}Define
 \begin{equation*} C_{x,y,s}= \{(s-x\sinh(t)-y\cosh(t),\sinh(t)):t \in {\mathbb{R}}\}.\end{equation*}
\begin{equation*} C_{x,y,s}= \{(s-x\sinh(t)-y\cosh(t),\sinh(t)):t \in {\mathbb{R}}\}.\end{equation*}Then
 \begin{equation*}s \in p_{(1,x,y)}(K) \iff (K \cap c_{x,y,s} \neq \varnothing) \iff (K' \cap C_{x,y,s} \neq \varnothing).\end{equation*}
\begin{equation*}s \in p_{(1,x,y)}(K) \iff (K \cap c_{x,y,s} \neq \varnothing) \iff (K' \cap C_{x,y,s} \neq \varnothing).\end{equation*} For each  $x,y$ we define a function
$x,y$ we define a function  $\alpha_{x,y}$ on the plane: To calculate
$\alpha_{x,y}$ on the plane: To calculate  $\alpha_{x,y}(a,b)$, take the curve
$\alpha_{x,y}(a,b)$, take the curve  $C_{x,y,s}$ through
$C_{x,y,s}$ through  $(a,b)$ and take the slope of the tangent of this curve at
$(a,b)$ and take the slope of the tangent of this curve at  $(a,b)$ with respect to the
$(a,b)$ with respect to the  $b$ axis. Observe that
$b$ axis. Observe that  $\alpha_{x,y}$ always exists and is never
$\alpha_{x,y}$ always exists and is never  $\pm \infty$. The function
$\pm \infty$. The function  $\alpha_{(x,y)}(a,b)$ is continuous as a function of
$\alpha_{(x,y)}(a,b)$ is continuous as a function of  $x,y,a,b$. Thus, it is uniformly continuous on compact sets. Applying this to
$x,y,a,b$. Thus, it is uniformly continuous on compact sets. Applying this to  $[0,G]\times[0,G]\times[0,1]\times[0,1]$ we obtain
$[0,G]\times[0,G]\times[0,1]\times[0,1]$ we obtain
 \begin{equation}
\begin{aligned}
\forall G \in {\mathbb{R}} \forall \varepsilon \exists \delta \,& \forall r_1, r_2 \in [0, 1]^2, \, |x|, |y| \leq G, \, |r_1 - r_2| \lt \delta \\
&\implies \left| \alpha_{x,y}(r_1) - \alpha_{x,y}(r_2) \right| \lt \varepsilon.
\end{aligned}
\end{equation}
\begin{equation}
\begin{aligned}
\forall G \in {\mathbb{R}} \forall \varepsilon \exists \delta \,& \forall r_1, r_2 \in [0, 1]^2, \, |x|, |y| \leq G, \, |r_1 - r_2| \lt \delta \\
&\implies \left| \alpha_{x,y}(r_1) - \alpha_{x,y}(r_2) \right| \lt \varepsilon.
\end{aligned}
\end{equation}2.3. Construction of
$K'$

We will prove that the set constructed by Talagrand [Reference Talagrand9] (see also in [Reference Hansen7]) is a suitable set. For the sake of completeness, we repeat the construction.
By induction, we shall construct a decreasing sequence  $(K_m')$ of finite unions of closed rectangles such that
$(K_m')$ of finite unions of closed rectangles such that  $K'=\cap_{m=1}^{\infty} K_m'$ has the desired properties. To begin with let
$K'=\cap_{m=1}^{\infty} K_m'$ has the desired properties. To begin with let  $\varepsilon_1 = 1 $ and
$\varepsilon_1 = 1 $ and  $K_1' = [0, 1]^2 $. We now suppose that
$K_1' = [0, 1]^2 $. We now suppose that  $m \in {\mathbb{N}}, 0 \lt \varepsilon_m \leq 1/m $, and that
$m \in {\mathbb{N}}, 0 \lt \varepsilon_m \leq 1/m $, and that  $K_m' $ is a union of rectangles
$K_m' $ is a union of rectangles
 \begin{equation*}
R_n = [a_n, a_n + \frac{\varepsilon_m}{N}] \times \left[ \frac{n - 1}{N}, \frac{n}{N} \right], \quad 1 \leq n \leq N,
\end{equation*}
\begin{equation*}
R_n = [a_n, a_n + \frac{\varepsilon_m}{N}] \times \left[ \frac{n - 1}{N}, \frac{n}{N} \right], \quad 1 \leq n \leq N,
\end{equation*}where  $N \in {\mathbb{N}}^+$,
$N \in {\mathbb{N}}^+$,  $a_1, \dots, a_N \in {\mathbb{R}} $. We will now construct
$a_1, \dots, a_N \in {\mathbb{R}} $. We will now construct  $K_{m+1}'$.
$K_{m+1}'$.
We fix  $1 \leq n \leq N $, define
$1 \leq n \leq N $, define  $P_{0,1} = R_n $, and choose
$P_{0,1} = R_n $, and choose  $k_m \in {\mathbb{N}} $ such that
$k_m \in {\mathbb{N}} $ such that  $k_m \geq \frac{2m}{\varepsilon_m} $. Starting with
$k_m \geq \frac{2m}{\varepsilon_m} $. Starting with  $ P_{0,1} $, we construct parallelograms
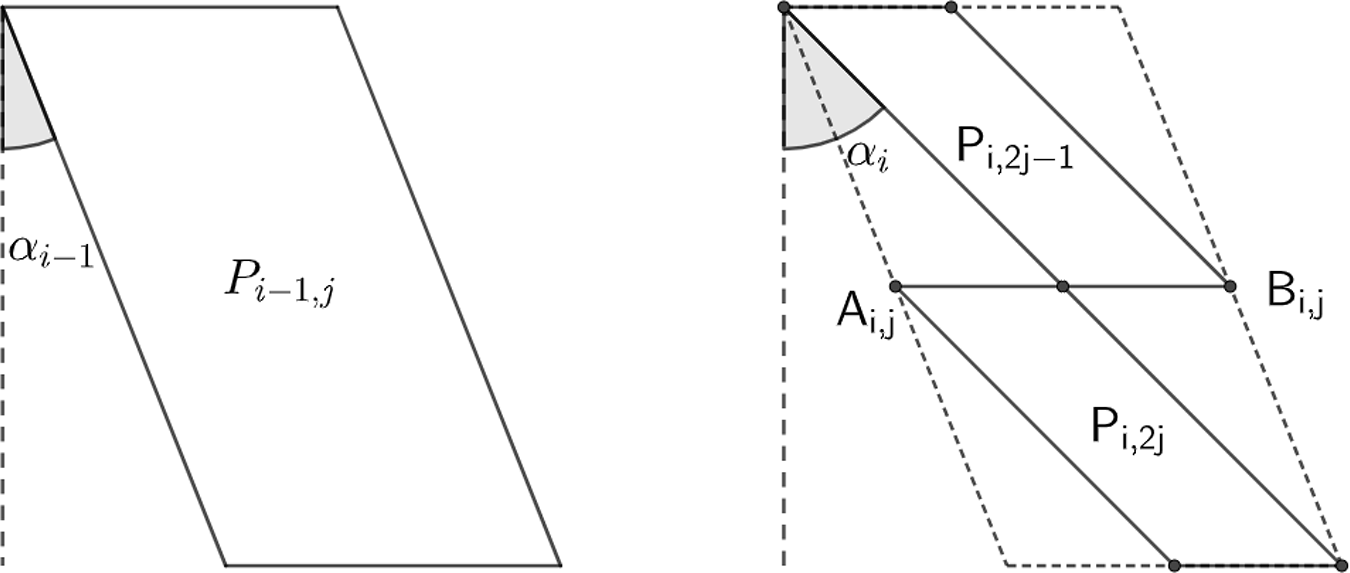
$ P_{0,1} $, we construct parallelograms  $P_{i,j}, 1 \leq i \leq k_m, 1 \leq j \leq 2^i $. We take the midpoint of every side of
$P_{i,j}, 1 \leq i \leq k_m, 1 \leq j \leq 2^i $. We take the midpoint of every side of  $P_{i-1,j}$, let the midpoint of the left side be
$P_{i-1,j}$, let the midpoint of the left side be  $A_{i,j}$, and the midpoint of the right side
$A_{i,j}$, and the midpoint of the right side  $B_{i,j}$. Take the midpoint of
$B_{i,j}$. Take the midpoint of  $A_{i,j}B_{i,j}$ and let the parallelograms
$A_{i,j}B_{i,j}$ and let the parallelograms  $P_{i,2j-1}$,
$P_{i,2j-1}$,  $P_{i,2j}$ be as indicated by Figure 1. Let
$P_{i,2j}$ be as indicated by Figure 1. Let  $\alpha_i$ denote the slope corresponding to the highlighted angle of Figure 1.
$\alpha_i$ denote the slope corresponding to the highlighted angle of Figure 1.
From  $P_{i-1,j}$ to
$P_{i-1,j}$ to  $P_{i,2j-1}$ and
$P_{i,2j-1}$ and  $P_{i,2j}$.
$P_{i,2j}$.

Figure 1 Long description
The diagram consists of two parts. On the left, a parallelogram labeled P subscript i minus one comma j is shown with a highlighted angle labeled alpha subscript i minus one at the top left corner. On the right, a more detailed construction is depicted. The parallelogram P subscript i minus one comma j is divided into two smaller parallelograms, P subscript i comma 2j minus 1 and P subscript i comma 2j, by a horizontal line. The midpoints of the left and right sides of the original parallelogram are labeled A subscript i comma j and B subscript i comma j, respectively. The line connecting these midpoints is shown and the angle at the top left is labeled alpha subscript i. Dotted lines extend from the vertices of the smaller parallelograms, indicating their alignment with the original shape.
It follows by induction from the construction that the two intervals  $p_{(0,1)}(P_{i,2j-1}) $ and
$p_{(0,1)}(P_{i,2j-1}) $ and  $p_{(0,1)}(P_{i,2j}) $ have length
$p_{(0,1)}(P_{i,2j}) $ have length  $2^{-i}/N $ and that
$2^{-i}/N $ and that  $ |A_{i,j} - B_{i,j}| = 2^{-i+1}\varepsilon_m/N $. Therefore, in the last step also using that
$ |A_{i,j} - B_{i,j}| = 2^{-i+1}\varepsilon_m/N $. Therefore, in the last step also using that  $k_m\ge \frac{2m}{\varepsilon_m}$, we obtain
$k_m\ge \frac{2m}{\varepsilon_m}$, we obtain
 \begin{equation*}
\alpha_i = \frac{\varepsilon_m}{2} + \alpha_{i-1},
\end{equation*}
\begin{equation*}
\alpha_i = \frac{\varepsilon_m}{2} + \alpha_{i-1},
\end{equation*} \begin{equation}
\implies \alpha_i = \frac{i\varepsilon_m}{2},
\end{equation}
\begin{equation}
\implies \alpha_i = \frac{i\varepsilon_m}{2},
\end{equation} \begin{equation*}
\implies \alpha_{k_m} \ge m.
\end{equation*}
\begin{equation*}
\implies \alpha_{k_m} \ge m.
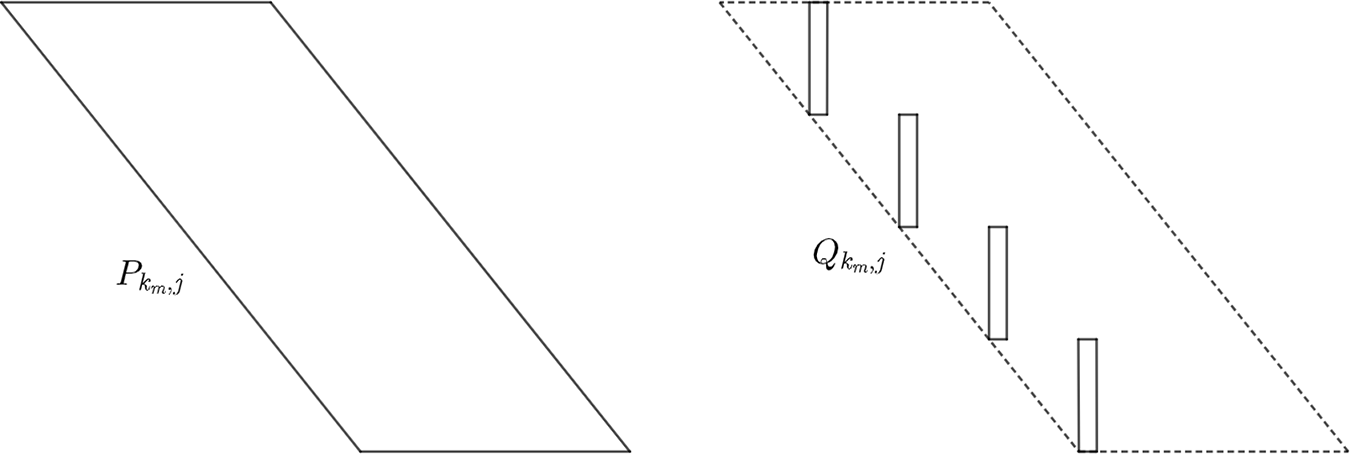
\end{equation*} Next we shall replace each  $P_{k_m,j} $ by a union of rectangles
$P_{k_m,j} $ by a union of rectangles  $Q_{k_m,j} $ (see Figure 2) such that
$Q_{k_m,j} $ (see Figure 2) such that  $p_{(0,1)}(Q_{k_m,j}) = p_{(0,1)}(P_{k_m,j}) $ and their union
$p_{(0,1)}(Q_{k_m,j}) = p_{(0,1)}(P_{k_m,j}) $ and their union  $T(K_m') $ satisfies
$T(K_m') $ satisfies
 \begin{equation*}\lambda(p_{(1,0)}(T(K_m'))) \leq\frac{1}{m+1} .\end{equation*}
\begin{equation*}\lambda(p_{(1,0)}(T(K_m'))) \leq\frac{1}{m+1} .\end{equation*}From  $P_{k_m,j}$ to
$P_{k_m,j}$ to  $Q_{k_m,j}$.
$Q_{k_m,j}$.

Figure 2 Long description
The schematic shows two adjacent slanted parallelogram-shaped regions sharing a common boundary. The first region is labeled P subscript k m comma j. The second region, labeled Q subscript k m comma j, has a dashed outer edge forming its exterior boundary. Five narrow vertical bars are attached along the upper slanted edge of region Q subscript k m comma j, each extending downward into the interior of that region. No numeric values, scale indicators, or measurement labels are visible in the image.
To that end we choose a suitable multiple  $N' $ of
$N' $ of  $2^{k_m} N $, an
$2^{k_m} N $, an  $\varepsilon_{m+1}\in(0,\frac1{m+1})$, which is sufficiently small, and replace each of the parallelograms
$\varepsilon_{m+1}\in(0,\frac1{m+1})$, which is sufficiently small, and replace each of the parallelograms  $P_{k_m,j}, 1 \leq j \leq 2^{k_m} $, by a subset
$P_{k_m,j}, 1 \leq j \leq 2^{k_m} $, by a subset  $Q_{k_m,j} $, which is a union of rectangles of the form
$Q_{k_m,j} $, which is a union of rectangles of the form
 $[t,~t~+~\varepsilon_{m+1}/N']~\times~[u,~u~+~1/N']$ as indicated by Figure 2. Using (2.1) we can choose
$[t,~t~+~\varepsilon_{m+1}/N']~\times~[u,~u~+~1/N']$ as indicated by Figure 2. Using (2.1) we can choose  $N'$ to be large enough, such that the oscillation of
$N'$ to be large enough, such that the oscillation of  $\alpha_{x,y}$ is less than
$\alpha_{x,y}$ is less than  $\frac{\varepsilon_{m+1}}{2}$ in each rectangle, whenever
$\frac{\varepsilon_{m+1}}{2}$ in each rectangle, whenever  $x,y \lt m$.
$x,y \lt m$.
If  $m $ is odd, let
$m $ is odd, let  $K_{m+1}' = T(K_m') $. If
$K_{m+1}' = T(K_m') $. If  $m $ is even, we take
$m $ is even, we take  $K_{m+1}' = S(T(S(K_m'))) $, where
$K_{m+1}' = S(T(S(K_m'))) $, where  $S $ denotes the reflection about the line
$S $ denotes the reflection about the line  $\{b = 1/2\}$.
$\{b = 1/2\}$.
2.4. Showing that
$K$ is suitable

Recall that  $K = f(K')$. It is clear that
$K = f(K')$. It is clear that  $K \subset H$ and
$K \subset H$ and  $p_{(0,1,0)}(K)$ is an interval, so it remains be proved that
$p_{(0,1,0)}(K)$ is an interval, so it remains be proved that  $\lambda(p_{(1,x,y)}(K))=0$ for any
$\lambda(p_{(1,x,y)}(K))=0$ for any  $x,y$. We now fix
$x,y$. We now fix  $x,y$. Let
$x,y$. Let  $F \subset {\mathbb{R}}^2$ be the set on which
$F \subset {\mathbb{R}}^2$ be the set on which  $\alpha_{x,y}$ is non-negative. It is easy to verify that
$\alpha_{x,y}$ is non-negative. It is easy to verify that  $F$ is a half-plane with a defining line parallel to the
$F$ is a half-plane with a defining line parallel to the  $a$-axis, or the whole plane, or possibly the empty set. We prove that
$a$-axis, or the whole plane, or possibly the empty set. We prove that
 \begin{equation}
\lambda(p_{(1,x,y)}(K \cap f(F))=0.
\end{equation}
\begin{equation}
\lambda(p_{(1,x,y)}(K \cap f(F))=0.
\end{equation} The reasoning is similar if  $\alpha_{x,y}$ is negative, in that case we need to use that for even
$\alpha_{x,y}$ is negative, in that case we need to use that for even  $m$ we have
$m$ we have  $K_{m+1}' = S(T(S(K_m'))) $. Thus (2.3) implies that
$K_{m+1}' = S(T(S(K_m'))) $. Thus (2.3) implies that  $K$ is a suitable set.
$K$ is a suitable set.
The following claim clearly implies (2.3), therefore it will complete the proof of Lemma 2.1 and thus the proof of Lemma 1.2.
Claim 2.2. If m is large enough and even, then
 \begin{equation*}\lambda(p_{(1,x,y)}(f(K_m' \cap F)) \le \frac{3\sqrt{1+x^2+y^2}}{2(m-1)}.\end{equation*}
\begin{equation*}\lambda(p_{(1,x,y)}(f(K_m' \cap F)) \le \frac{3\sqrt{1+x^2+y^2}}{2(m-1)}.\end{equation*}Proof. Let  $M$ be the maximum of
$M$ be the maximum of  $\alpha_{x,y}$ on
$\alpha_{x,y}$ on  $[0,1]^2$. We can choose
$[0,1]^2$. We can choose  $m$ to be larger than
$m$ to be larger than  $x+2$ and
$x+2$ and  $y+2$. The set
$y+2$. The set  $(K_{m-1}'\cap F)$ is a union of rectangles, this follows from the observation made on the possible shapes of
$(K_{m-1}'\cap F)$ is a union of rectangles, this follows from the observation made on the possible shapes of  $F$. Let
$F$. Let  $R$ be one of these rectangles. The oscillation of
$R$ be one of these rectangles. The oscillation of  $\alpha_{x,y}$ on
$\alpha_{x,y}$ on  $R$ is less than
$R$ is less than  $\frac{\varepsilon_{m-1}}{2}$, since
$\frac{\varepsilon_{m-1}}{2}$, since  $x,y \lt m -2$. Let
$x,y \lt m -2$. Let  $n$ be such that
$n$ be such that
 \begin{equation*}\alpha_{x,y} \subset \left[\frac{n\varepsilon_{m-1}}2, \frac{(n+2)\varepsilon_{m-1}}2\right]\end{equation*}
\begin{equation*}\alpha_{x,y} \subset \left[\frac{n\varepsilon_{m-1}}2, \frac{(n+2)\varepsilon_{m-1}}2\right]\end{equation*}on  $R$. For large enough
$R$. For large enough  $m$ we have
$m$ we have  $n+2 \lt k_{m-1}$, since
$n+2 \lt k_{m-1}$, since  $k_{m-1} \gt \frac{2(m-1)}{\varepsilon_{m-1}}$ and
$k_{m-1} \gt \frac{2(m-1)}{\varepsilon_{m-1}}$ and  $n \lt \frac{2M}{\varepsilon_{m-1}}$.
$n \lt \frac{2M}{\varepsilon_{m-1}}$.
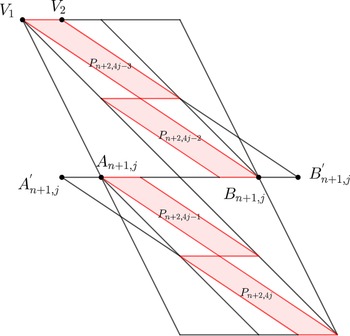
Let  $A_{n+1,j}' B_{n+1,j}'$ be the segment we obtain by scaling
$A_{n+1,j}' B_{n+1,j}'$ be the segment we obtain by scaling  $A_{n+1,j}B_{n+1,j}$ by
$A_{n+1,j}B_{n+1,j}$ by  $\frac{3}{2}$ from its midpoint (Figure 3). We claim that every curve
$\frac{3}{2}$ from its midpoint (Figure 3). We claim that every curve  $C_{x,y,s}$ intersecting
$C_{x,y,s}$ intersecting  $P_{n+2,4j-i}$, where
$P_{n+2,4j-i}$, where  $i = 0,1,2,3$ must intersect the segment
$i = 0,1,2,3$ must intersect the segment  $A_{n+1,j}^{'}B_{n+1,j}^{'}$. This can be verified for each parallelogram separately. We will only check this for
$A_{n+1,j}^{'}B_{n+1,j}^{'}$. This can be verified for each parallelogram separately. We will only check this for  $P_{n+2,4j-3}$, the others can be done similarly. Suppose
$P_{n+2,4j-3}$, the others can be done similarly. Suppose  $C_{x,y,s}$ intersects
$C_{x,y,s}$ intersects  $P_{n+2,4j-3}$. We claim that if it intersects the line of
$P_{n+2,4j-3}$. We claim that if it intersects the line of  $A_{n+1,j}^{'}B_{n+1,j}^{'}$ right of
$A_{n+1,j}^{'}B_{n+1,j}^{'}$ right of  $B_{n+1,j}'$, then it must be right of the segment
$B_{n+1,j}'$, then it must be right of the segment  $B_{n+1,j}' V_2$ in the horizontal strip between
$B_{n+1,j}' V_2$ in the horizontal strip between  $B_{n+1,j}'$ and
$B_{n+1,j}'$ and  $ V_2$. Indeed, this follows from the fact that by (2.2) the segment
$ V_2$. Indeed, this follows from the fact that by (2.2) the segment  $B_{n+1,j}' V_2$ has a slope of
$B_{n+1,j}' V_2$ has a slope of  $\frac{(n+2)\varepsilon_{m-1}}2$ with respect to the
$\frac{(n+2)\varepsilon_{m-1}}2$ with respect to the  $b$-axis, since the tangent of the curve has a smaller slope on
$b$-axis, since the tangent of the curve has a smaller slope on  $R$. On the left side, a slightly stronger statement is true. If the curve intersects the line of
$R$. On the left side, a slightly stronger statement is true. If the curve intersects the line of  $A_{n+1,j}^{'}B_{n+1,j}^{'}$ left of
$A_{n+1,j}^{'}B_{n+1,j}^{'}$ left of  $A_{n+1,j}$, then it must be left of the segment
$A_{n+1,j}$, then it must be left of the segment  $A_{n+1,j}V_1$ in the horizontal strip between
$A_{n+1,j}V_1$ in the horizontal strip between  $A_{n+1,j}$ and
$A_{n+1,j}$ and  $V_1$ (this segment has a slope of
$V_1$ (this segment has a slope of  $\frac{n\varepsilon_{m-1}}2$ with respect to the
$\frac{n\varepsilon_{m-1}}2$ with respect to the  $b$-axis).
$b$-axis).
Two generations of parallelograms.

Figure 3 Long description
The diagram features two parallelograms, each with labeled vertices and intersecting lines. At the top, the vertices are labeled V subscript 1 and V subscript 2. Below these, two parallelograms are formed with vertices labeled A prime subscript n plus 1 comma j, B prime subscript n plus 1 comma j, A subscript n plus 1 comma j and B subscript n plus 1 comma j. Inside the parallelograms, there are intersecting lines forming smaller parallelograms shaded in red. These smaller parallelograms are labeled P subscript n plus 2 comma 4j minus 3, P subscript n plus 2 comma 4j minus 1 and P subscript n plus 2 comma 4j. The lines connecting these points create a complex geometric pattern, illustrating the relationship between the larger and smaller parallelograms.
The segment  $A_{n+1,j}^{'}B_{n+1,j}^{'}$ is of length
$A_{n+1,j}^{'}B_{n+1,j}^{'}$ is of length  $\frac{2^{-(n+1)}3\varepsilon_{m-1}}{N}$. Note that
$\frac{2^{-(n+1)}3\varepsilon_{m-1}}{N}$. Note that  $f(A_{n+1,j}^{'}B_{n+1,j}^{'})$ is a segment of the same length. This means that
$f(A_{n+1,j}^{'}B_{n+1,j}^{'})$ is a segment of the same length. This means that
 \begin{equation*}
\begin{aligned}
& \lambda(p_{(1,x,y)}(f( \cup_{i=0}^{3} P_{n+2,4j-i}))) \le \lambda(p_{(1,x,y)}(f(A_{n+1,j}^{'}B_{n+1,j}^{'}))) \le \\
& \quad \le \frac{2^{-(n+1)}3\varepsilon_{m-1}}{N}\sqrt{1+x^2+y^2},
\end{aligned}
\end{equation*}
\begin{equation*}
\begin{aligned}
& \lambda(p_{(1,x,y)}(f( \cup_{i=0}^{3} P_{n+2,4j-i}))) \le \lambda(p_{(1,x,y)}(f(A_{n+1,j}^{'}B_{n+1,j}^{'}))) \le \\
& \quad \le \frac{2^{-(n+1)}3\varepsilon_{m-1}}{N}\sqrt{1+x^2+y^2},
\end{aligned}
\end{equation*} \begin{equation*}\lambda(p_{(1,x,y)}(f(R\cap K_m'))) \le \sum_{j=1}^{2^{n}}\lambda(p_{(1,x,y)}(f( \cup_{i=0}^{3} P_{n+2,4j-i}))) \le \frac{3\varepsilon_{m-1}}{2N}\sqrt{1+x^2+y^2},\end{equation*}
\begin{equation*}\lambda(p_{(1,x,y)}(f(R\cap K_m'))) \le \sum_{j=1}^{2^{n}}\lambda(p_{(1,x,y)}(f( \cup_{i=0}^{3} P_{n+2,4j-i}))) \le \frac{3\varepsilon_{m-1}}{2N}\sqrt{1+x^2+y^2},\end{equation*} \begin{equation*}
\begin{aligned}
&\lambda(p_{(1,x,y)}(f(K_{m}'\cap F))) \le \sum_{i=1}^N \lambda(p_{(1,x,y)}(f(R_i))) \le \\
& \quad \le \frac{3\varepsilon_{m-1}}{2}\sqrt{1+x^2+y^2} \le \frac{3\sqrt{1+x^2+y^2}}{2(m-1)}.
\end{aligned}
\end{equation*}
\begin{equation*}
\begin{aligned}
&\lambda(p_{(1,x,y)}(f(K_{m}'\cap F))) \le \sum_{i=1}^N \lambda(p_{(1,x,y)}(f(R_i))) \le \\
& \quad \le \frac{3\varepsilon_{m-1}}{2}\sqrt{1+x^2+y^2} \le \frac{3\sqrt{1+x^2+y^2}}{2(m-1)}.
\end{aligned}
\end{equation*}3. Rotating a square: the proof of Theorem 1.1
3.1. Neighbourhoods of
$A$

Call a rectangle in  ${\mathbb{R}}^3$
${\mathbb{R}}^3$  $\textit{interesting}$ if its sides are of length
$\textit{interesting}$ if its sides are of length  $1$ and
$1$ and  $\sqrt{2}$, one of the shorter sides lies in the plane
$\sqrt{2}$, one of the shorter sides lies in the plane  $\{y=0\}$, it has a
$\{y=0\}$, it has a  $45^\circ$ angle with the
$45^\circ$ angle with the  $\{y=0\}$ plane and is in the
$\{y=0\}$ plane and is in the  $y \ge 0$ half-space. By the neighbourhood of an interesting rectangle we will mean a set that contains the rectangle and is relatively open in
$y \ge 0$ half-space. By the neighbourhood of an interesting rectangle we will mean a set that contains the rectangle and is relatively open in  ${\mathbb{R}}\times [0,1]\times {\mathbb{R}}$.
${\mathbb{R}}\times [0,1]\times {\mathbb{R}}$.
Claim 3.1. For every  $\varepsilon \gt 0$, there exists a set
$\varepsilon \gt 0$, there exists a set  $U$ such that for every possible direction,
$U$ such that for every possible direction,  $U$ contains a neighbourhood of an interesting rectangle in that direction, while it intersects the
$U$ contains a neighbourhood of an interesting rectangle in that direction, while it intersects the  $\{y=h\}$ plane in a set of measure less than
$\{y=h\}$ plane in a set of measure less than  $\varepsilon$ for all
$\varepsilon$ for all  $h$.
$h$.
Proof. Let  $A$ be the set provided by Lemma 1.2. Fix an N large enough that
$A$ be the set provided by Lemma 1.2. Fix an N large enough that
 \begin{equation*} A \cap ((-N,N) \times [0,1] \times (-N,N))\end{equation*}
\begin{equation*} A \cap ((-N,N) \times [0,1] \times (-N,N))\end{equation*}contains an interesting rectangle in every direction. For any  $\delta \gt 0$ let
$\delta \gt 0$ let  $A_\delta$ be
$A_\delta$ be  $A + \{(x,0,z)| x^2 + z^2 \lt \delta\}$, where + denotes the Minkowski sum and define
$A + \{(x,0,z)| x^2 + z^2 \lt \delta\}$, where + denotes the Minkowski sum and define  $A_0$ to be
$A_0$ to be  $A$. The set
$A$. The set  $A_\delta$ is open for all
$A_\delta$ is open for all  $\delta \gt 0$, since
$\delta \gt 0$, since  $A$ is a union of planes (none of which are parallel to
$A$ is a union of planes (none of which are parallel to  $\{y=0\}$) and we replace each plane with an open set. Define
$\{y=0\}$) and we replace each plane with an open set. Define
 \begin{equation*}B_\delta = A_\delta \cap ([-N,N] \times [0,1] \times [-N,N]).\end{equation*}
\begin{equation*}B_\delta = A_\delta \cap ([-N,N] \times [0,1] \times [-N,N]).\end{equation*} The set  $B_\delta$ is a relatively open in
$B_\delta$ is a relatively open in  $[-N,N] \times [0,1] \times [-N,N]$ for all
$[-N,N] \times [0,1] \times [-N,N]$ for all  $\delta \gt 0$, therefore
$\delta \gt 0$, therefore  $B_\delta$ contains a neighbourhood of an interesting rectangle in every possible direction.
$B_\delta$ contains a neighbourhood of an interesting rectangle in every possible direction.
Let  $f_\delta(h) = \lambda(B_\delta \cap \{y=h\})$. Using the fact that
$f_\delta(h) = \lambda(B_\delta \cap \{y=h\})$. Using the fact that  $B_0$ is compact, it is easy to verify that the function
$B_0$ is compact, it is easy to verify that the function  $f_\delta(h)$ is continuous in
$f_\delta(h)$ is continuous in  $\delta$. Since
$\delta$. Since  $f_0(h)=0, f_\delta(h)$ converges to 0 as
$f_0(h)=0, f_\delta(h)$ converges to 0 as  $\delta$ tends to 0.
$\delta$ tends to 0.
We claim that
 \begin{equation}
f_{\delta+t}(h_1) \ge f_{\delta}(h_2)
\end{equation}
\begin{equation}
f_{\delta+t}(h_1) \ge f_{\delta}(h_2)
\end{equation}whenever  $|h_1 - h_2| \lt t$. In fact,
$|h_1 - h_2| \lt t$. In fact,
 \begin{equation*}(x, h_2, z) \in B_\delta \implies (x, h_1, z) \in B_{\delta+t}.\end{equation*}
\begin{equation*}(x, h_2, z) \in B_\delta \implies (x, h_1, z) \in B_{\delta+t}.\end{equation*} Indeed, for every point  $p$ in
$p$ in  $B_\delta \cap \{y= h_2 \}$ the set
$B_\delta \cap \{y= h_2 \}$ the set  $A$ contains a plane that intersects
$A$ contains a plane that intersects  $\{y= h_2 \}$ in a line, which is at most distance
$\{y= h_2 \}$ in a line, which is at most distance  $\delta$ away from
$\delta$ away from  $p$. This plane has a
$p$. This plane has a  $45^\circ$ angle with the
$45^\circ$ angle with the  $\{y= h_2 \}$ plane and intersects
$\{y= h_2 \}$ plane and intersects  $\{y= h_1 \}$ as well.
$\{y= h_1 \}$ as well.
By (3.1) and the continuity of  $f_\delta(h)$ in
$f_\delta(h)$ in  $\delta$, we obtain that
$\delta$, we obtain that  $f_\delta(h)$ is upper semicontinuous in
$f_\delta(h)$ is upper semicontinuous in  $h$. Hence,
$h$. Hence,  $f_\frac{1}{n}$ is a sequence of upper semicontinuous functions on
$f_\frac{1}{n}$ is a sequence of upper semicontinuous functions on  $[0,1]$, which is pointwise monotonically decreasing, and pointwise converges to 0. It is easy to prove that such a sequence must uniformly converge to 0. Therefore, there exists a
$[0,1]$, which is pointwise monotonically decreasing, and pointwise converges to 0. It is easy to prove that such a sequence must uniformly converge to 0. Therefore, there exists a  $\delta_0 \gt 0$ such that
$\delta_0 \gt 0$ such that  $U=B_{\delta_0}$ has all the required properties.
$U=B_{\delta_0}$ has all the required properties.
3.2. Rotating an interesting rectangle
Let  $R$ be an interesting rectangle. Call a continuous motion
$R$ be an interesting rectangle. Call a continuous motion  $M$ of
$M$ of  $R$ interesting if at every moment it keeps
$R$ interesting if at every moment it keeps  $R$ interesting.
$R$ interesting.
Lemma 3.2. For all  $\varepsilon \gt 0$ there exists an interesting motion of
$\varepsilon \gt 0$ there exists an interesting motion of  $R$, during which
$R$, during which  $R$ does a full a rotation, but
$R$ does a full a rotation, but  $R \cap \{y=t\}$ sweeps an area less than
$R \cap \{y=t\}$ sweeps an area less than  $\varepsilon$ for all
$\varepsilon$ for all  $t$.
$t$.
Proof. We will use the idea of Pál joins to move between translated copies. We claim that for any interesting rectangle  $R'$ parallel to
$R'$ parallel to  $R$ there exists an interesting motion of
$R$ there exists an interesting motion of  $R$ during which
$R$ during which  $R\cap\{y=t\}$ sweeps less than
$R\cap\{y=t\}$ sweeps less than  $\varepsilon$ area for all
$\varepsilon$ area for all  $t$ and
$t$ and  $R$ is translated to
$R$ is translated to  $R'$.
$R'$.
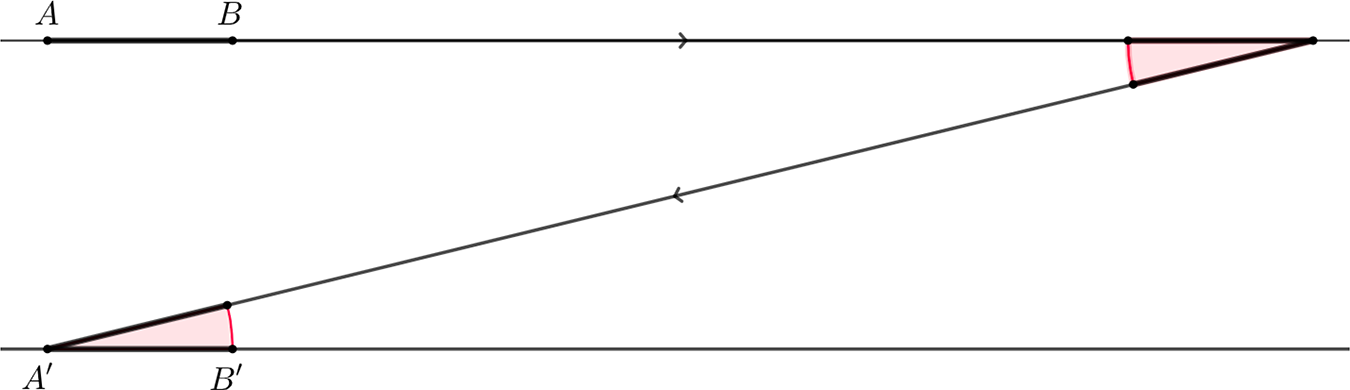
There is a direction in which we can translate  $R$ in such a way that it sweeps 0 area at every height, call this its free direction. We will move
$R$ in such a way that it sweeps 0 area at every height, call this its free direction. We will move  $R$ in an N-like shape (Fig. 4). We translate it in its free direction, there we rotate it by a small angle, then we translate it in its free direction, and rotate it in the opposite direction by the same angle. If we translate it far enough, then the angle of rotation can be arbitrarily small, and so the area swept at each height will be small.
$R$ in an N-like shape (Fig. 4). We translate it in its free direction, there we rotate it by a small angle, then we translate it in its free direction, and rotate it in the opposite direction by the same angle. If we translate it far enough, then the angle of rotation can be arbitrarily small, and so the area swept at each height will be small.
The motion of  $R$ in the
$R$ in the  $y=0$ plane during a Pál join.
$y=0$ plane during a Pál join.

Figure 4 Long description
The diagram features two parallel horizontal lines. The upper line has points labeled A and B, with an arrow indicating direction from A to B. The lower line has points labeled A prime and B prime, with an arrow indicating direction from A prime to B prime. A diagonal line connects point A to point B prime, forming two triangles. The triangle on the left has a marked angle at A prime and the triangle on the right has a marked angle at B. Both angles are shaded in red.
Let  $U$ be the set given by Claim 3.1. For any possible direction
$U$ be the set given by Claim 3.1. For any possible direction  $d$,
$d$,  $U$ contains the neighbourhood of an interesting rectangle
$U$ contains the neighbourhood of an interesting rectangle  $R_d$, which is in the direction of
$R_d$, which is in the direction of  $d$. For each
$d$. For each  $R_d$, there is an interesting motion that rotates the rectangle a small amount within
$R_d$, there is an interesting motion that rotates the rectangle a small amount within  $U$. Since
$U$. Since  $S^1$ is compact, we can choose finitely many directions, whose neighbourhoods cover all directions. We have seen that we can move between parallel copies of
$S^1$ is compact, we can choose finitely many directions, whose neighbourhoods cover all directions. We have seen that we can move between parallel copies of  $R$ while sweeping an arbitrarily small area at all heights; therefore, these will only add an arbitrarily small area to the arbitrarily small area of
$R$ while sweeping an arbitrarily small area at all heights; therefore, these will only add an arbitrarily small area to the arbitrarily small area of  $U$ at each height.
$U$ at each height.
3.3. Proof of the main result
Proof of Theorem 1.1
Let  $M$ be the motion of an interesting rectangle
$M$ be the motion of an interesting rectangle  $R$ given by Lemma 3.2. Let
$R$ given by Lemma 3.2. Let  $T = R \cap \{y=0 \}$. If at every moment we project
$T = R \cap \{y=0 \}$. If at every moment we project  $R$ onto the
$R$ onto the  $\{y=0\}$ plane, then we get
$\{y=0\}$ plane, then we get  $M'$, a motion of the unit square. Observe that during
$M'$, a motion of the unit square. Observe that during  $M'$ the segment at
$M'$ the segment at  $t$ distance from
$t$ distance from  $T$ sweeps the same area, as
$T$ sweeps the same area, as  $R \cap \{y=t\}$ does during
$R \cap \{y=t\}$ does during  $M$.
$M$.
4. Sets with the strong Kakeya property in
${\mathbb{R}}^3$

Recall that we say that a compact set  $K\subset {\mathbb{R}}^3$ is cylinderlike if there exists
$K\subset {\mathbb{R}}^3$ is cylinderlike if there exists  $n\in {\mathbb{N}}$ such that for almost all
$n\in {\mathbb{N}}$ such that for almost all  $t$ the set
$t$ the set  $\{y=t\}\cap K$ can be covered by
$\{y=t\}\cap K$ can be covered by  $n$ vertical lines.
$n$ vertical lines.
Lemma 4.1. If  $\varphi$ is a rotation around the
$\varphi$ is a rotation around the  $y$-axis,
$y$-axis,  $K$ is cylinderlike, then
$K$ is cylinderlike, then  $K$ can be moved to
$K$ can be moved to  $\varphi(K)$ in an arbitrarily small volume.
$\varphi(K)$ in an arbitrarily small volume.
Proof. We will look at  $K$ from the direction of the
$K$ from the direction of the  $y$-axis and give a motion that keeps the
$y$-axis and give a motion that keeps the  $y$-coordinate of every point constant. The set
$y$-coordinate of every point constant. The set  $K$ is bounded, so its projection onto the
$K$ is bounded, so its projection onto the  $\{y=0\}$ plane can be covered by a square. Apply Theorem 1.1 to this square. This naturally induces a motion on
$\{y=0\}$ plane can be covered by a square. Apply Theorem 1.1 to this square. This naturally induces a motion on  $K$. For almost all planes perpendicular to the
$K$. For almost all planes perpendicular to the  $y$-axis, the swept area will be less than
$y$-axis, the swept area will be less than  $n\varepsilon$, since if a plane contains
$n\varepsilon$, since if a plane contains  $n$ vertical segments, then the motion of each segment corresponds to the motion of a vertical segment of the square and these all sweep an area less than
$n$ vertical segments, then the motion of each segment corresponds to the motion of a vertical segment of the square and these all sweep an area less than  $\varepsilon$. Applying Fubini’s theorem, we are done.
$\varepsilon$. Applying Fubini’s theorem, we are done.
Remark 4.2. It is easy to check that the proof of the above lemma also works for general cylinderlike sets defined as follows: For a compact set  $K\subset {\mathbb{R}}^3$ let
$K\subset {\mathbb{R}}^3$ let  $n(t)$ be the minimum (possibly infinite) number of vertical lines required to cover
$n(t)$ be the minimum (possibly infinite) number of vertical lines required to cover  $K \cap \{y= t\}$. Say that
$K \cap \{y= t\}$. Say that  $K$ is general cylinderlike if
$K$ is general cylinderlike if  $\int_{\mathbb{R}} n(t) dt \lt \infty$.
$\int_{\mathbb{R}} n(t) dt \lt \infty$.
Recall that we say that a compact set  $K$ is cylinderlike from direction
$K$ is cylinderlike from direction  $d$ if there is an orthogonal coordinate system, in which the
$d$ if there is an orthogonal coordinate system, in which the  $y$-axis is parallel to
$y$-axis is parallel to  $d$, and
$d$, and  $K$ is cylinderlike.
$K$ is cylinderlike.
By Lemma 4.1: If  $K$ is cylinderlike from direction
$K$ is cylinderlike from direction  $d$, then
$d$, then  $K$ can be rotated around
$K$ can be rotated around  $d$ in an arbitrarily small volume.
$d$ in an arbitrarily small volume.
Proof of Theorem 1.3
Translations can be done again with Pál joins: If  $K$ is cylinderlike from some direction, then there exists a direction in which K can be translated in 0 volume. We can bring it very far from its original position sweeping 0 volume, there we rotate it by a very small angle, translate it in the free direction and rotate it back by the same angle. Therefore, we can move
$K$ is cylinderlike from some direction, then there exists a direction in which K can be translated in 0 volume. We can bring it very far from its original position sweeping 0 volume, there we rotate it by a very small angle, translate it in the free direction and rotate it back by the same angle. Therefore, we can move  $K$ to an arbitrary translated position in an arbitrarily small area.
$K$ to an arbitrary translated position in an arbitrarily small area.
Let  $\varphi$ be an orientation-preserving isometry of
$\varphi$ be an orientation-preserving isometry of  ${\mathbb{R}}^3$ such that
${\mathbb{R}}^3$ such that  $\varphi(K)$ is the desired position of
$\varphi(K)$ is the desired position of  $K$. By using translations, we can suppose that the origin is a fixed point of
$K$. By using translations, we can suppose that the origin is a fixed point of  $\varphi$. Take unit vectors
$\varphi$. Take unit vectors  $v_1$ and
$v_1$ and  $v_2$ parallel to
$v_2$ parallel to  $d_1$ and
$d_1$ and  $d_2$, respectively. This can be done in a way such that their distance on
$d_2$, respectively. This can be done in a way such that their distance on  $S^2$ is
$S^2$ is  $t\le \frac\pi2$. Since
$t\le \frac\pi2$. Since  $v_1$ and
$v_1$ and  $v_2$ are non-parallel, the vectors
$v_2$ are non-parallel, the vectors  $\varphi(v_1), \varphi(v_2)$ uniquely determine
$\varphi(v_1), \varphi(v_2)$ uniquely determine  $\varphi$. From this point forward, every distance is the arc distance on
$\varphi$. From this point forward, every distance is the arc distance on  $S^2$. By Lemma 4.1, we can rotate
$S^2$. By Lemma 4.1, we can rotate  $K$ around the vectors
$K$ around the vectors  $v_1, v_2$ in an arbitrarily small volume. Therefore, it is enough to solve the following problem: Take
$v_1, v_2$ in an arbitrarily small volume. Therefore, it is enough to solve the following problem: Take  $S^2$ and stick two needles (
$S^2$ and stick two needles ( $n_1$ and
$n_1$ and  $ n_2$) into it, at endpoints of
$ n_2$) into it, at endpoints of  $v_1$ and
$v_1$ and  $v_2$, respectively. The following step is allowed: take a needle and rotate the sphere around it. The other needle moves accordingly. We need to prove that we can get the needles to any pair of fixed points
$v_2$, respectively. The following step is allowed: take a needle and rotate the sphere around it. The other needle moves accordingly. We need to prove that we can get the needles to any pair of fixed points  $p_1$ and
$p_1$ and  $p_2$, which are
$p_2$, which are  $t$ distance apart, in a finite number of steps.
$t$ distance apart, in a finite number of steps.
First case: Suppose  $n_1$ and
$n_1$ and  $p_1$ are further than
$p_1$ are further than  $t$ apart. Then we rotate around
$t$ apart. Then we rotate around  $n_1$ in a way such that
$n_1$ in a way such that  $n_2$ moves onto a short arc between
$n_2$ moves onto a short arc between  $n_1 $ and
$n_1 $ and  $ p_1$. Then we rotate around
$ p_1$. Then we rotate around  $n_2$ by
$n_2$ by  $\pi$. If the original distance of
$\pi$. If the original distance of  $n_1$ and
$n_1$ and  $p_1$ was
$p_1$ was  $s$, then their new distance after this step will be
$s$, then their new distance after this step will be  $|s-2t|$. It is clear that after a finite number of steps,
$|s-2t|$. It is clear that after a finite number of steps,  $n_1$ and
$n_1$ and  $ p_1$ will be at most
$ p_1$ will be at most  $t$ distance apart.
$t$ distance apart.
Second case: Suppose  $n_1, p_1$ are at most
$n_1, p_1$ are at most  $t$ apart. We rotate around
$t$ apart. We rotate around  $n_1$ in a way such that
$n_1$ in a way such that  $n_2$ moves onto the circle centred around
$n_2$ moves onto the circle centred around  $p_1$ of radius
$p_1$ of radius  $t$. We can rotate around
$t$. We can rotate around  $n_2$ in such a way that
$n_2$ in such a way that  $n_1$ moves into
$n_1$ moves into  $p_1$. Now we can rotate
$p_1$. Now we can rotate  $n_2$ into
$n_2$ into  $p_2$ by rotating around
$p_2$ by rotating around  $n_1$.
$n_1$.
Corollary 4.3. If for a compact set  $A \subset {\mathbb{R}}^2$ there exists an
$A \subset {\mathbb{R}}^2$ there exists an  $n\in{\mathbb{N}}$ and non-parallel directions
$n\in{\mathbb{N}}$ and non-parallel directions  $d_1$ and
$d_1$ and  $d_2$, such that every line perpendicular to
$d_2$, such that every line perpendicular to  $d_i$ intersects
$d_i$ intersects  $A$ in at most
$A$ in at most  $n$ points for
$n$ points for  $i\in\{1,2\}$, then
$i\in\{1,2\}$, then  $A\times[0,1]$ has the strong Kakeya property.
$A\times[0,1]$ has the strong Kakeya property.
Proof. The set  $A\times[0,1]$ is cylinderlike from directions
$A\times[0,1]$ is cylinderlike from directions  $d_1$ and
$d_1$ and  $d_2$, therefore by Theorem 1.3 it has the strong Kakeya property.
$d_2$, therefore by Theorem 1.3 it has the strong Kakeya property.
Corollary 4.4. If, in a fixed coordinate system, a compact  $A$ can be covered by a finite union of graphs of Lipschitz functions, then
$A$ can be covered by a finite union of graphs of Lipschitz functions, then  $A\times[0,1]$ possesses the strong Kakeya property.
$A\times[0,1]$ possesses the strong Kakeya property.
Proof. The graph of a Lipschitz function intersects every steep enough line in one point, therefore we can use Corollary 4.3.
Corollary 4.5. If, in a fixed coordinate system, a compact  $A$ is such that it can be covered by the graphs of a finite number of monotonic functions, then
$A$ is such that it can be covered by the graphs of a finite number of monotonic functions, then  $K$ possesses the strong Kakeya property.
$K$ possesses the strong Kakeya property.
Proof. Under such conditions,  $A$ intersects every horizontal and vertical line in at most
$A$ intersects every horizontal and vertical line in at most  $n$ points, where
$n$ points, where  $n$ is the number of monotonic functions required to cover
$n$ is the number of monotonic functions required to cover  $A$. Again, Corollary 4.3 can be applied.
$A$. Again, Corollary 4.3 can be applied.
Corollary 4.6. The lateral surface of a cylinder has the strong Kakeya property. Moreover, the finite union of parallel lateral cylinder surfaces possesses the strong Kakeya property.
Corollary 4.7. If a compact  $K\subset{\mathbb{R}}^3$ can be covered by a finite set of planes that have normal vectors in a common plane, then
$K\subset{\mathbb{R}}^3$ can be covered by a finite set of planes that have normal vectors in a common plane, then  $K$ has the strong Kakeya property.
$K$ has the strong Kakeya property.








 Open access
Open access