


1. Introduction
Technical progress has been the driving force of economic growth since the dawn of agriculture, and particularly since the Industrial Revolution ushered in the era of modern growth. This economic growth has been accompanied by the replacement of human labor, first by animals and then by machines. While this process has doubtless harmed some individual workers, historically the overall effect has been to boost the incomes of workers and owners of capital in tandem, as evidenced by the roughly constant share of labor in national income over time. In recent years, however, there has been growing concern that the current episode of technical progress (which we call automation) is qualitatively different, with much more drastic implications for growth and the income distribution. As this automation is substituting for human labor in a broader manner than previous episodes of technical change (which we call traditional technical progress), it is likely to both accelerate economic growth (by replacing scarce labor with reproducible capital), and decrease the labor share of national income. Since most households derive most of their income from labor, whereas capital ownership is concentrated, this will likely lead to growing inequality and political instability. Some experts, such as Brynjolfsson and McAfee (Reference Brynjolfsson and McAfee2014) and Ford (Reference Ford2015), forecast these trends to continue and even accelerate in the coming years.Footnote 1
Public discussion of these trends has included consideration of a wide range of fiscal policy tools to ameliorate these effects. Some commentators have called for an expansion of safety net and income assistance programs, or even for the institution of widespread unconditional monetary transfers to all citizens, sometimes called a “universal basic income” (UBI).Footnote 2 The idea of UBI, the most novel of the policies being discussed, has garnered increasing public support, rising from 12 percent ten years ago to 48 percent in 2018 in a poll of the American public CNBC (2018).Footnote 3 Van Parijs and Vanderborght (Reference Van Parijs and Vanderborght2017) also highlight its potential to provide stability amidst evolving job markets (more so in light of the accelerating pace of automation), allowing individuals to manage career transitions without fear of financial instability. Moreover, governments throughout the world are piloting projects to understand how individuals respond to such a public policy tool and its broader economic consequences (Forbes (Reference Forbes2015); Wired (2017)).Footnote 4
Inspired by this discussion, we construct a model of automation in which distributional considerations and policy responses are front and center. For this purpose, we begin with the task-based model of production, which has recently become standard in the literature on automation.Footnote 5 However, rather than adopting a representative agent framework, we include workers and entrepreneurs as separate agents. Following this literature, output is defined as a CES aggregate of tasks, wherein individual tasks utilize capital and labor with perfect substitutability. Given this typical assumption of perfect substitutability between the two, in equilibrium a fraction of tasks is done using only capital and another is done using only labor. Moreover, we point out that this yields a convenient aggregate representation of production in terms of aggregate capital and labor in the economy, with the elasticity of substitution across tasks now representing the elasticity between capital and labor. Finally, in this task-based model, as discussed later, an increase in capital productivity can be nicely decomposed into “traditional technical progress” that increases its effectiveness at tasks currently done with capital versus “automation” which allows capital to do some of the tasks previously being done by labor. This intuitive way of capturing automation as the increase in the fraction of tasks done by capital is an important reason for the use of the task-based representation in the automation literature.
We begin by analyzing the equilibrium of the model under majority voting, with workers in the majority, in which policymakers have access to a set of transfers which can implement a “universal basic income”, along with labor and capital taxes. This allows us to speak directly to the current debate, in which distributional concerns are foremost and universal transfer programs are being contemplated. Under the assumptions of majority voting and a worker majority, policy will be set to maximize worker welfare, which is equivalent to the solution of an optimal policy problem in which the planner places no weight on entrepreneurs. In this setting, we find that it is optimal to tax capital at a higher rate than labor in the long run, independent of technology, with the excess used to finance a net transfer to workers. We also derive expressions for optimal taxes and transfer along a transition.
Next we analytically characterize the long-run distributional effects of technical change under optimal policy for a stylized productivity schedule for capital in which traditional technical progress and automation are controlled by two different exogenous parameters. The major result is that, while the labor share of income may increase or decrease in response to traditional technical progress depending on whether the elasticity of substitution between capital and labor is below or above 1, this share unambiguously declines in response to automation. Moreover, whereas the wage unambiguously rises with traditional technical progress, it can decline with automation if labor has relatively higher productivity in tasks being automated relative to other tasks being done by labor.
Having described the long-run distributional effects of technical change, we quantitatively analyze an episode of automation in the model calibrated to the US economy, with the extent of automation motivated by the trends in the labor share in the USA in the past four decades. Our focus is to understand how workers’ control of policy under majority voting helps them to increase their welfare and mitigate adverse effects of automation. To do so, we compare workers’ (and entrepreneurs’) welfare when taxes are fixed with their welfare when taxes and transfers are allowed to vary optimally in accordance with majority voting during an episode of automation. Unsurprisingly, we find that entrepreneurs gain much more than workers under both scenarios, but quite surprisingly, going from fixed taxes to majority voting increases entrepreneurs’ welfare by an order of magnitude more than that of workers.Footnote 6 This result is particularly striking because this policy is set without consideration of entrepreneur welfare, since workers are assumed to be in the majority. In particular, despite maximization of workers’ welfare under majority, their gains are second-order while those of entrepreneurs’ are first-order.
This result is driven by the surprising fact that workers vote for lower capital taxes during the transition, because they benefit from faster accumulation of capital by entrepreneurs, which causes their wages and UBI transfers to grow as well. While this may be surprising, it arises from a simple and intuitive reason: optimal policy requires accelerated accumulation of capital, which is implemented through lower capital taxes along the transition. The resulting benefit for workers in terms of faster wage growth is offset by reduced transfers in the interim, whereas for entrepreneurs the lower capital taxes raise both their current consumption and future capital holdings without any offsetting forces. Thus the welfare gain from adopting optimal policy is first-order for entrepreneurs, but second-order for workers. This difference may underlie interest in UBI by many tech entrepreneurs, since when workers are able to receive a direct share of the income from automation, they support policies that benefit entrepreneurs much more than themselves.
The paper is organized as follows: Section 2 discusses related literature. Section 3 lays out the model. Section 4 analyzes optimal policy under majority voting. Section 5 analytically characterizes the long-run consequences of an episode of automation under this optimal policy. Section 6 studies the dynamics and welfare properties of the transition following an episode of automation. Section 7 concludes. Finally, section 6 examines an extension in which different kinds of capital may be taxed at different rates (i.e. there may be “robot taxes”). It shows that the planner finds it optimal to tax all kinds of capital at the same rate (no “robot taxes”).
2. Related literature
The task-based modeling of production used by us is common in the theoretical literature on automation, being used in, for example, Aghion et al. (Reference Aghion, Jones and Jones2017) and several recent papers by Acemoglu and Restrepo (chiefly Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018c), Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018a), and Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b)).Footnote 7 Our contribution relative to this existing theoretical literature on automation comes from our focus on the distributional consequences, our analysis of optimal policy under majority voting, and our quantitative analysis of optimal policy during an episode of automation.
Several papers have examined the consequences of task-based automation within the framework of standard growth models. An early example is Zeira (Reference Zeira1998), who argues that different incentives to engage in automation may play a role in explaining international differences in productivity. More recently, Aghion et al. (Reference Aghion, Jones and Jones2017) consider how automation and artificial intelligence (AI) alter standard results in models of economic growth. Similarly, Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018c) first analyze comparative statics of technical change, then balanced growth with directed technical change in a model in which there are two kinds of technological progress: introduction of new tasks and automation of existing tasks.
As our specific model bears a significant similarity to that in Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018c), it is worth describing in detail the differences between our analysis and theirs. Their model features a representative agent, while ours has workers and entrepreneurs as separate agents. This allows us to speak more directly to distributional concerns. Additionally, we analyze optimal taxes and transfers under majority voting, both in steady state and over the course of an episode of automation, while they do not focus on policy at all. This allows us to speak to the question of how the distributional consequences of automation should be managed from the perspective of workers, whose labor is being displaced. Further, by allowing for broad-based transfers to workers, we speak to the policy debates regarding large-scale transfer programs and “universal basic income” guarantees, which the prospect of ongoing automation has brought to the fore. Finally, we quantitatively analyze optimal policy in response to an episode of automation in a calibrated model, shedding light on the specific policy recommendations indicated by our analysis. By contrast, Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018c) focus on characterizing the positive effects of automation, both with a fixed capital stock and on a balanced growth path in a model with endogenous technical change. They also focus exclusively on theoretical results, rather than a quantitative analysis.
Given our focus on the distributional consequences of automation, our works is related to a few recent theoretical papers that focus on these issues. Korinek and Stiglitz (Reference Korinek and Stiglitz2019) analyze the consequences of automation for income inequality, taking a broad view of the question. Similarly, Berg et al. (Reference Berg, Buffie and Zanna2018) study the implications of automation for growth and inequality in several related models in which low-skilled workers do not save or accumulate capital, and conclude that automation is good for growth but increases inequality. Our work differs from these in some model details, but mainly in our examination of optimal policy under majority voting, and our quantitative analysis of an episode of automation. Moll et al. (Reference Moll, Rachel and Restrepo2022) consider a rich quantitative model of automation which includes both hetereogeneity in labor productivity and idiosyncratic wealth shocks. They find that automation increases inequality, both through substituting for low-skill labor and through increasing the return to capital. Our work differs from theirs through our focus on policy and optimally managing an episode of automation.
Guerreiro et al. (Reference Guerreiro, Rebelo and Teles2022) consider automation as growth in the efficiency of capital that substitutes for only low-skill workers and examine optimal taxation of this labor-substituting capital in a quantitative model with consideration of distributional implications. They focus on differential effects of automation for high- and low-skill workers and, for this purpose, allow for endogenous human capital accumulation by workers. On the other hand, our focus is on the distributional implications of automation for workers and entrepreneurs, and thus we abstract from human capital accumulation, instead allowing for separate workers and entrepreneurs. They find that a planner that weights all workers equally will find it optimal to tax robots in the short run, but not in the long run, as workers endogenously choose to invest in human capital accumulation. We analyze optimal policy under majority voting, which sets policy in the interest of workers alone. Our results differ in finding that optimal capital taxes are positive in the long run and lower over the transition. Further, in an extension in section 7 we show that, unlike theirs, more targeted “robot taxes” are never optimal in our setting, given the existence of a broad-based transfer and labor mobility across tasks.
Our analysis of optimal policy under majority voting is also related to the literature on optimal capital taxation. Judd (Reference Judd1985) and Chamley (Reference Chamley1986) famously found that zero capital taxation is optimal in the long run, even when the planner only considers the welfare of workers, as in our model under majority voting. Lansing (Reference Lansing1999) pointed out that this result does not hold for log utility, a counterexample expanded on by Reinhorn (Reference Reinhorn2019). Recently, Straub and Werning (Reference Straub and Werning2020) have clarified that the zero-tax result only holds when entrepreneurs have an intertemporal elasticity of substitution (IES) below
 $1$
, whereas no steady state exists for IES>1. We avoid these issues by following Lansing (Reference Lansing1999) in focusing on the case of log utility, which is both highly tractable and, in our view, more realistic in its results.Footnote
8
While these papers focus on characterizing optimal taxes in the long run under fixed technology, we do a quantitative analysis of optimal policy in an economy that experiences a wave of automation that initiates a transition to a new steady state. Thus, we are able to shed light on the current debate surrounding how policymakers should manage the distributional implications of automation, and whether broad-based transfers such as a UBI would be helpful in doing so.
$1$
, whereas no steady state exists for IES>1. We avoid these issues by following Lansing (Reference Lansing1999) in focusing on the case of log utility, which is both highly tractable and, in our view, more realistic in its results.Footnote
8
While these papers focus on characterizing optimal taxes in the long run under fixed technology, we do a quantitative analysis of optimal policy in an economy that experiences a wave of automation that initiates a transition to a new steady state. Thus, we are able to shed light on the current debate surrounding how policymakers should manage the distributional implications of automation, and whether broad-based transfers such as a UBI would be helpful in doing so.
Our work is also related to the literature on optimal Ramsey tax policy in models with incomplete insurance and heterogeneous agents. For example, Conesa et al. (Reference Conesa, Kitao and Krueger2009) study optimal labor and capital taxes in an overlapping generations model with uninsurable income risk, calibrated to the US economy. They find that the optimal tax rate in the long run is 36%, driven by the lifecycle structure of the model (the planner would like to tax older households at a higher rate, and they hold more capital). Likewise, Bakış et al., (Reference Bakış, Kaymak and Poschke2015) study optimal policy in a dynastic heterogeneous agent model with uninsurable risk due to productivity shocks correlated across generations. Their results emphasize the importance of transitional dynamics, as they find that a progressive tax system with positive capital taxes is optimal when the transition is taken into account, but not when steady states are compared. More recently, Acikgoz et al., (Reference Acikgoz, Hagedorn, Holter and Wang2018) and Dyrda and Pedroni (Reference Dyrda and Pedroni2023) have studied optimal policy in a model of uninsurable income risk, and find positive long-run optimal capital taxes of 21.5% and 27% in the long run respectively. Our treatment of optimal policy differs from this literature in two important respects. First, we focus on distributional considerations between workers and entrepreneurs, and thus compute optimal policy under majority voting, whereas this literature considers a Ramsey planner that weights households equally and is concerned about providing optimal insurance against heterogeneous income risk in the presence of incomplete markets. Secondly, we deal with the problem of managing an episode of automation (i.e. technological change of a particular kind), rather than determining optimal policy in a stationary model calibrated to the current US economy. Thus the central tradeoffs and concerns involved are different, though related.
Our optimal policy analysis also complements recent work on normative analysis of UBI policy, for example, in Ghatak and Maniquet (Reference Ghatak and Maniquet2019), who shed light on the UBI debate in the context of developing countries in a theoretical setting. It considers different economic environments, focusing on factors like population subsistence, market formality, and state capacity, and analyzes the feasibility of a UBI scheme under a linear income tax rule considering its impact on the labor supply. The paper finds that a UBI may be a favored instrument to circumvent the imperfections in government functioning in developing countries. Moreover, the case for a UBI, even from a feasibility perspective, may be stronger for poorer countries. In terms of the inequality impacts of a UBI, our paper focuses on between-group inequality (that is, between workers and entrepreneurs). There is also a strand of literature that examines impact of UBI on within-group inequality under incomplete insurance a la Aiyagari (Reference Aiyagari1994) through the lens of overlapping generation models wherein a group of agents with homogeneous preferences and characteristics experience heterogeneous shocks. A key mechanism explored in this literature is the construction of capital by individuals as a means of self-insuring against idiosyncratic shocks. The consequences of UBI in this environment is explored under different modeling assumptions. While all studies find that introducing a UBI reduces capital accumulation as self-insurance becomes less important, different studies find switching to a UBI makes agents better or worse off depending on the modeling features included.Footnote 9
3. Model
The model is set in continuous time with an infinite horizon and time denoted
 $t\geq 0$
. There are four types of agents in the economy: workers who supply labor and consume their income every period; entrepreneurs, who own capital; firms, which rent capital, hire labor and produce goods; and the government, which levies various kinds of taxes, engages in wasteful spending, and arranges transfers to other agents.
$t\geq 0$
. There are four types of agents in the economy: workers who supply labor and consume their income every period; entrepreneurs, who own capital; firms, which rent capital, hire labor and produce goods; and the government, which levies various kinds of taxes, engages in wasteful spending, and arranges transfers to other agents.
3.1. Workers
There is a unit measure of workers with lifetime preferences
 \begin{equation} \int _{0}^{\infty }e^{-\gamma t}U\left (C_{w}(t),L(t)\right )dt, \end{equation}
\begin{equation} \int _{0}^{\infty }e^{-\gamma t}U\left (C_{w}(t),L(t)\right )dt, \end{equation}
where
 $U({\cdot})$
is strictly increasing and concave in both arguments, and where
$U({\cdot})$
is strictly increasing and concave in both arguments, and where
 $C_{w}(t)$
is consumption and
$C_{w}(t)$
is consumption and
 $L(t)$
is labor supply. Workers supply
$L(t)$
is labor supply. Workers supply
 $L(t)\geq 0$
units of labor to firms, for which they receive an after-tax wage of
$L(t)\geq 0$
units of labor to firms, for which they receive an after-tax wage of
 $\left (1-\tau ^{\ell }(t)\right )w(t)$
. They also receive a transfer from the government,
$\left (1-\tau ^{\ell }(t)\right )w(t)$
. They also receive a transfer from the government,
 $T^{w}(t)$
. They consume all of their income, so their consumption isFootnote
10
$T^{w}(t)$
. They consume all of their income, so their consumption isFootnote
10
 \begin{equation} C_{w}=\left (1-\tau ^{\ell }\right )wL+T^{w}. \end{equation}
\begin{equation} C_{w}=\left (1-\tau ^{\ell }\right )wL+T^{w}. \end{equation}
We assume that workers are not able to own capital. Therefore they exhibit hand-to-mouth consumption behavior by assumption. Their only non-trivial decision is labor supply, which satisfies the condition
 \begin{equation} \left (1-\tau ^{\ell }\right )wU_{C}\left (C_{w},L\right )\leq -U_{L}\left (C_{w},L\right ), \end{equation}
\begin{equation} \left (1-\tau ^{\ell }\right )wU_{C}\left (C_{w},L\right )\leq -U_{L}\left (C_{w},L\right ), \end{equation}
which holds with equality when
 $L\gt 0$
.
$L\gt 0$
.
A particularly useful utility function, which we use in our quantitative analysis, is log in consumption and leisure:
 \begin{equation} U\left (C,L\right )=\log \left (C\right )+\phi \log \left (1-L\right ), \end{equation}
\begin{equation} U\left (C,L\right )=\log \left (C\right )+\phi \log \left (1-L\right ), \end{equation}
in which case labor supply satisfies
 \begin{equation} L=\frac{1}{1+\phi }\cdot \max \left (0,1-\frac{\phi T^{w}}{\left (1-\tau ^{\ell }\right )w}\right ). \end{equation}
\begin{equation} L=\frac{1}{1+\phi }\cdot \max \left (0,1-\frac{\phi T^{w}}{\left (1-\tau ^{\ell }\right )w}\right ). \end{equation}
The condition for zero labor supply is
 \begin{equation*} \frac {\phi T^{w}}{\left (1-\tau ^{\ell }\right )w}\geq 1. \end{equation*}
\begin{equation*} \frac {\phi T^{w}}{\left (1-\tau ^{\ell }\right )w}\geq 1. \end{equation*}
In other words, if the transfer is sufficiently large relative to the after-tax wage, the household does not supply any labor.
3.2. Entrepreneurs
There is also a measure
 $n_e\in (0,1)$
of entrepreneurs who have preferences given by
$n_e\in (0,1)$
of entrepreneurs who have preferences given by
 \begin{equation} \int _{0}^{\infty }e^{-\rho t}\log \left (c_{e}\right ). \end{equation}
\begin{equation} \int _{0}^{\infty }e^{-\rho t}\log \left (c_{e}\right ). \end{equation}
Entrepreneurs each own capital
 $k$
, which they rent to firms at rental rate
$k$
, which they rent to firms at rental rate
 $r$
. Capital depreciates at rate
$r$
. Capital depreciates at rate
 $\delta$
, and capital income is subject to a tax of
$\delta$
, and capital income is subject to a tax of
 $\tau ^{k}$
gross of depreciation. Therefore, an entrepreneur’s budget constraint is given by
$\tau ^{k}$
gross of depreciation. Therefore, an entrepreneur’s budget constraint is given by
 \begin{equation*} \dot {{k}}+c_{e}=r^{k}k \end{equation*}
\begin{equation*} \dot {{k}}+c_{e}=r^{k}k \end{equation*}
where
 \begin{equation} r^{k}\equiv \left (1-\tau ^{k}\right )r-\delta \end{equation}
\begin{equation} r^{k}\equiv \left (1-\tau ^{k}\right )r-\delta \end{equation}
is the after-tax net return on capital. Their consumption behavior satisfies the dynamic optimality condition
 \begin{equation*} \dot {c}_e/c_e=r^{k}-\rho \end{equation*}
\begin{equation*} \dot {c}_e/c_e=r^{k}-\rho \end{equation*}
which, together with their budget constraint implies
 \begin{equation*} c_e = \rho k. \end{equation*}
\begin{equation*} c_e = \rho k. \end{equation*}
As there is a measure
 $n_e$
of entrepreneurs, per-capita consumption and capital holdings of entrepreneurs are related to aggregate variables by
$n_e$
of entrepreneurs, per-capita consumption and capital holdings of entrepreneurs are related to aggregate variables by
 $C_e = n_e c_e$
and
$C_e = n_e c_e$
and
 $K = n_e k$
. Then the expressions above imply the following aggregate expressions:
$K = n_e k$
. Then the expressions above imply the following aggregate expressions:
 \begin{equation} \dot{{K}} =r^{k}K - C_e \end{equation}
\begin{equation} \dot{{K}} =r^{k}K - C_e \end{equation}
 \begin{equation} \dot{C}_e/C_e =r^{k}-\rho \end{equation}
\begin{equation} \dot{C}_e/C_e =r^{k}-\rho \end{equation}
 \begin{equation} C_e = \rho K \end{equation}
\begin{equation} C_e = \rho K \end{equation}
Equation (10) implies that entrepreneurs consume a constant flow share of their wealth. This result follows from the twin assumptions of log utility, which implies an intertemporal elasticity of substitution (IES) equal to
 $1$
, and zero non-capital income. Together, these assumptions imply that income and substitution effects cancel and the entrepreneur consumption function is not forward-looking. We make these assumptions to avoid issues arising from the manipulation of tax rates far in the future in the optimal policy problem we analyze in section 4, which would otherwise lead either to the non-existence of an interior steady state (for IES<1), or to slow convergence to zero capital tax rates in the long run (for IES>1). Since these results rely on perfect commitment to tax rates in the far future, and correspondingly forward-looking responses by entrepreneurs to these rates, they requires strong assumptions about commitment and rationality which are unlikely to hold in reality. Thus for our purposes log utility is not only more convenient, but also more realistic in its results.Footnote
11
$1$
, and zero non-capital income. Together, these assumptions imply that income and substitution effects cancel and the entrepreneur consumption function is not forward-looking. We make these assumptions to avoid issues arising from the manipulation of tax rates far in the future in the optimal policy problem we analyze in section 4, which would otherwise lead either to the non-existence of an interior steady state (for IES<1), or to slow convergence to zero capital tax rates in the long run (for IES>1). Since these results rely on perfect commitment to tax rates in the far future, and correspondingly forward-looking responses by entrepreneurs to these rates, they requires strong assumptions about commitment and rationality which are unlikely to hold in reality. Thus for our purposes log utility is not only more convenient, but also more realistic in its results.Footnote
11
Note that we allow entrepreneurs’ discount rate
 $\rho$
to differ from that of workers
$\rho$
to differ from that of workers
 $\gamma$
. We do this for two reasons. First, given the central importance of intertemporal substitution to any question of capital taxation, and especially to managing an episode of technical change occurring over a period of time, the discount rate is a critical parameter. Thus it is interesting to examine how our results depend on this rate, considered separately for workers and entrepreneurs. Second, we think that it is intuitive that entrepreneurs have a lower discount rate than workers, as we assume in our quantitative model in Section 6. This is consistent with workers holding no capital, and with a large body of literature supporting a link between heterogenous intertemporal discounting and wealth inequality.Footnote
12
$\gamma$
. We do this for two reasons. First, given the central importance of intertemporal substitution to any question of capital taxation, and especially to managing an episode of technical change occurring over a period of time, the discount rate is a critical parameter. Thus it is interesting to examine how our results depend on this rate, considered separately for workers and entrepreneurs. Second, we think that it is intuitive that entrepreneurs have a lower discount rate than workers, as we assume in our quantitative model in Section 6. This is consistent with workers holding no capital, and with a large body of literature supporting a link between heterogenous intertemporal discounting and wealth inequality.Footnote
12
3.3. Firms
The firms choose an optimal production plan for given wage
 $w$
and rental rate of capital
$w$
and rental rate of capital
 $r$
. The production technology is constant-returns-to-scale (CRS) and is given by
$r$
. The production technology is constant-returns-to-scale (CRS) and is given by
 \begin{equation} Y=\left [\int _{0}^{1}\left (y\left (i\right )\right )^{1-\frac{1}{\sigma }}di\right ]^{\frac{\sigma }{\sigma -1}}, \end{equation}
\begin{equation} Y=\left [\int _{0}^{1}\left (y\left (i\right )\right )^{1-\frac{1}{\sigma }}di\right ]^{\frac{\sigma }{\sigma -1}}, \end{equation}
where
 $y\left (i\right )$
is the contribution of task
$y\left (i\right )$
is the contribution of task
 $i$
to overall output,
$i$
to overall output,
 $Y$
. Thus,
$Y$
. Thus,
 $\sigma$
is the elasticity of substitution among tasks in production. As we will see later, in equilibrium it will also be the elasticity of substitution between capital and labor. There is a unit measure of tasks indexed by
$\sigma$
is the elasticity of substitution among tasks in production. As we will see later, in equilibrium it will also be the elasticity of substitution between capital and labor. There is a unit measure of tasks indexed by
 $i\in \left [0,1\right ]$
. Each task can be performed by labor or capital. The output of task
$i\in \left [0,1\right ]$
. Each task can be performed by labor or capital. The output of task
 $i$
satisfies:
$i$
satisfies:
 \begin{equation} y\left (i\right )=a\left (i\right )k\left (i\right )+b\left (i\right )\ell \left (i\right ) \end{equation}
\begin{equation} y\left (i\right )=a\left (i\right )k\left (i\right )+b\left (i\right )\ell \left (i\right ) \end{equation}
where
 $a\left (i\right )$
denotes the productivity of capital in task
$a\left (i\right )$
denotes the productivity of capital in task
 $i$
, and
$i$
, and
 $b\left (i\right )$
denotes the productivity of human labor in task
$b\left (i\right )$
denotes the productivity of human labor in task
 $i$
. We assume, without loss of generality, that
$i$
. We assume, without loss of generality, that
 $a\left (i\right ),b\left (i\right )\geq 0$
for all
$a\left (i\right ),b\left (i\right )\geq 0$
for all
 $i$
, and that tasks are ordered such that
$i$
, and that tasks are ordered such that
 $a\left (i\right )/b\left (i\right )$
is weakly decreasing in
$a\left (i\right )/b\left (i\right )$
is weakly decreasing in
 $i$
. We further require that
$i$
. We further require that
 $k\left (i\right ),\ell \left (i\right )\geq 0$
.
$k\left (i\right ),\ell \left (i\right )\geq 0$
.
We adopt a task-based aggregation of the overall production process of the economy. This choice is more appropriate for our purposes as our focus is on automation and the process of automation is associated with substitution between capital and labor at the level of tasks, rather than goods. Therefore, tasks represent an intuitive disaggregated unit for the specification of the production technology.
3.3.1. Optimal production and factor demand
Next we characterize the optimal production plan of firms and derive expressions for factor demand.Footnote
13
We assume that capital and labor are both fully mobile across tasks. Then there is a single wage
 $w$
and rental rate of capital
$w$
and rental rate of capital
 $r$
. Optimal production by firms yields an allocation of capital and labor across tasks
$r$
. Optimal production by firms yields an allocation of capital and labor across tasks
 $\{k(i),\ell (i)\}$
such that aggregate output
$\{k(i),\ell (i)\}$
such that aggregate output
 $Y$
is the following function of aggregate capital
$Y$
is the following function of aggregate capital
 $K=\int _ik(i)$
and labor
$K=\int _ik(i)$
and labor
 $L=\int _i\ell (i)$
:
$L=\int _i\ell (i)$
:
 \begin{equation} Y = F(K,L) \equiv \max _\alpha \left \{ \left [\alpha ^{\frac{1}{\sigma }}\left (A(\alpha ) \cdot K\right )^{1-\frac{1}{\sigma }}+\left (1-\alpha \right )^{\frac{1}{\sigma }}\left (B(\alpha ) \cdot L\right )^{1-\frac{1}{\sigma }}\right ]^{\frac{\sigma }{\sigma -1}} \right \} \end{equation}
\begin{equation} Y = F(K,L) \equiv \max _\alpha \left \{ \left [\alpha ^{\frac{1}{\sigma }}\left (A(\alpha ) \cdot K\right )^{1-\frac{1}{\sigma }}+\left (1-\alpha \right )^{\frac{1}{\sigma }}\left (B(\alpha ) \cdot L\right )^{1-\frac{1}{\sigma }}\right ]^{\frac{\sigma }{\sigma -1}} \right \} \end{equation}
where
 \begin{equation} A(\alpha) = \left [\frac{1}{\alpha }\int _{0}^{\alpha }\left (a\left (i\right )\right )^{\sigma -1}di\right ]^{\frac{1}{\sigma -1}}, \end{equation}
\begin{equation} A(\alpha) = \left [\frac{1}{\alpha }\int _{0}^{\alpha }\left (a\left (i\right )\right )^{\sigma -1}di\right ]^{\frac{1}{\sigma -1}}, \end{equation}
 \begin{equation} B(\alpha ) = \left [\frac{1}{1-\alpha }\int _{\alpha }^{1}\left (b\left (i\right )\right )^{\sigma -1}di\right ]^{\frac{1}{\sigma -1}} \end{equation}
\begin{equation} B(\alpha ) = \left [\frac{1}{1-\alpha }\int _{\alpha }^{1}\left (b\left (i\right )\right )^{\sigma -1}di\right ]^{\frac{1}{\sigma -1}} \end{equation}
are average capital and labor productivity respectively, and where
 $\alpha \in [0,1]$
is the share of tasks done by capital. The optimal choice of
$\alpha \in [0,1]$
is the share of tasks done by capital. The optimal choice of
 $\alpha$
satisfies:
$\alpha$
satisfies:
 \begin{equation} \begin{cases} \dfrac{a\left (i\right )}{b\left (i\right )}\geq q(\alpha, K,L) & \text{for }i\lt \alpha \\[15pt] \dfrac{a\left (i\right )}{b\left (i\right )}\leq q(\alpha, K,L) & \text{for }i\gt \alpha . \end{cases} \end{equation}
\begin{equation} \begin{cases} \dfrac{a\left (i\right )}{b\left (i\right )}\geq q(\alpha, K,L) & \text{for }i\lt \alpha \\[15pt] \dfrac{a\left (i\right )}{b\left (i\right )}\leq q(\alpha, K,L) & \text{for }i\gt \alpha . \end{cases} \end{equation}
where
 $q$
is given by
$q$
is given by
 \begin{equation} q(\alpha, K,L) = \left (\frac{\int _{0}^{\alpha }\left (a\left (i\right )\right )^{\sigma -1}di}{\int _{\alpha }^{1}\left (b\left (i\right )\right )^{\sigma -1}di}\cdot \frac{L}{K}\right )^{\frac{1}{\sigma }} \end{equation}
\begin{equation} q(\alpha, K,L) = \left (\frac{\int _{0}^{\alpha }\left (a\left (i\right )\right )^{\sigma -1}di}{\int _{\alpha }^{1}\left (b\left (i\right )\right )^{\sigma -1}di}\cdot \frac{L}{K}\right )^{\frac{1}{\sigma }} \end{equation}
Note that, given our assumption that
 $a(i)/b(i)$
is weakly decreasing in
$a(i)/b(i)$
is weakly decreasing in
 $i$
,
$i$
,
 $q$
is strictly increasing in
$q$
is strictly increasing in
 $\alpha$
for given
$\alpha$
for given
 $(K,L)$
, and therefore (16) defines a unique value of
$(K,L)$
, and therefore (16) defines a unique value of
 $\alpha$
. Inverse capital and labor demand satisfy:
$\alpha$
. Inverse capital and labor demand satisfy:
 \begin{equation} w = F_{L}(K,L) = B^{1-1/\sigma }\left ( (1-\alpha ) Y/L \right )^{1/\sigma }, \end{equation}
\begin{equation} w = F_{L}(K,L) = B^{1-1/\sigma }\left ( (1-\alpha ) Y/L \right )^{1/\sigma }, \end{equation}
 \begin{equation} r = F_{K}(K,L) = A^{1-1/\sigma }\left ( \alpha Y/K \right )^{1/\sigma }, \end{equation}
\begin{equation} r = F_{K}(K,L) = A^{1-1/\sigma }\left ( \alpha Y/K \right )^{1/\sigma }, \end{equation}
from which we see that
 $q \equiv r/w$
is the relative factor price.
$q \equiv r/w$
is the relative factor price.
Thus, the production function has a standard CES representation, with capital and labor productivity terms, for a given value of
 $\alpha$
. Moreover, as noted earlier,
$\alpha$
. Moreover, as noted earlier,
 $\sigma$
, the elasticity of substitution among tasks, is also the elasticity of substitution between capital and labor. This representation closely resembles analogous expressions in other papers that use task-based models of automation, the closest being equation (7) in Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b). However, we also clearly highlight explicitly the share of tasks done by capital
$\sigma$
, the elasticity of substitution among tasks, is also the elasticity of substitution between capital and labor. This representation closely resembles analogous expressions in other papers that use task-based models of automation, the closest being equation (7) in Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b). However, we also clearly highlight explicitly the share of tasks done by capital
 $\alpha$
as well as provide a succinct representation of the productivity of capital,
$\alpha$
as well as provide a succinct representation of the productivity of capital,
 $A(\alpha )$
, and labor,
$A(\alpha )$
, and labor,
 $B(\alpha )$
. This has an important advantage for our purposes as the effect of a marginal change in the capital efficiency schedule
$B(\alpha )$
. This has an important advantage for our purposes as the effect of a marginal change in the capital efficiency schedule
 $a(i)$
can be decomposed into changes in
$a(i)$
can be decomposed into changes in
 $A$
and
$A$
and
 $\alpha$
. These two components quite intuitively capture the distinction between automation and traditional technical progress: technical change that produces an increase in
$\alpha$
. These two components quite intuitively capture the distinction between automation and traditional technical progress: technical change that produces an increase in
 $\alpha$
represents automation, since tasks previously done by labor are now being done by capital, whereas technical change that produces an increase in
$\alpha$
represents automation, since tasks previously done by labor are now being done by capital, whereas technical change that produces an increase in
 $A$
represents traditional technical progress.Footnote
14
$A$
represents traditional technical progress.Footnote
14
3.4. Government
The government sets taxes on capital income and labor income. It uses this income to pay for transfers to workers and to finance expenditures,
 $G$
, which otherwise do not enter the model. The government budget constraint, therefore, is
$G$
, which otherwise do not enter the model. The government budget constraint, therefore, is
 \begin{equation} \tau ^{\ell }wL+\tau ^{k}rK=T^{w}+G \end{equation}
\begin{equation} \tau ^{\ell }wL+\tau ^{k}rK=T^{w}+G \end{equation}
Government expenditures are assumed to be a fixed fraction of GDP
 \begin{equation} G(t) = \omega Y(t) \end{equation}
\begin{equation} G(t) = \omega Y(t) \end{equation}
and may be interpreted as the provision of core functions of government, such as defense, law enforcement, a legal system, basic infrastructure, and so on. Transfers may be considered all broad and untargeted government transfers, plus services that directly substitute for household consumption expenditures.
For the moment we will take the path of tax rates and transfers
 $\{\tau ^k,\tau ^\ell, T^w\}$
as exogenous, subject to satisfying the government budget constraint (20). In section 4 we will analyze the optimal choice of taxes and transfers under the assumption of majority voting.
$\{\tau ^k,\tau ^\ell, T^w\}$
as exogenous, subject to satisfying the government budget constraint (20). In section 4 we will analyze the optimal choice of taxes and transfers under the assumption of majority voting.
3.5. Existence of steady state with fixed tax rates
An interesting feature of models like this oneFootnote 15 is the possibility of continuous growth through capital accumulation. Thus, before turning to the analysis of optimal policy, we briefly discuss the question of the existence of a steady state for fixed technology and tax rates. The following proposition gives a condition under which the economy reaches a steady state:
Proposition 1.
Suppose that
 $a(i)$
,
$a(i)$
,
 $b(i)$
,
$b(i)$
,
 $\tau ^\ell$
, and
$\tau ^\ell$
, and
 $\tau ^k$
are all constant. Let
$\tau ^k$
are all constant. Let
 $A(1)$
be capital productivity
$A(1)$
be capital productivity
 $A(\alpha )$
, as defined in (
14
), as
$A(\alpha )$
, as defined in (
14
), as
 $\alpha \to 1$
. Then if
$\alpha \to 1$
. Then if
 \begin{equation} A\left (1\right ) \gt \frac{\rho +\delta }{1-\tau ^{k}}\equiv r^{\ast }\gt 0 \end{equation}
\begin{equation} A\left (1\right ) \gt \frac{\rho +\delta }{1-\tau ^{k}}\equiv r^{\ast }\gt 0 \end{equation}
the growth rate of the capital stock,
 $\dot{K}/K$
, is bounded below by
$\dot{K}/K$
, is bounded below by
 $A(1) - r^\ast \gt 0$
, and therefore the capital stock grows continually and the economy does not reach a steady state. By contrast, if
$A(1) - r^\ast \gt 0$
, and therefore the capital stock grows continually and the economy does not reach a steady state. By contrast, if
 $A(1) \lt r^\ast$
, the economy reaches a steady state with
$A(1) \lt r^\ast$
, the economy reaches a steady state with
 $r=r^\ast$
.
$r=r^\ast$
.
Proof. See Appendix A.2.
This result follows from the fact that, as
 $\alpha \to 1$
, the production function approaches
$\alpha \to 1$
, the production function approaches
 $Y = A(1) \cdot K$
, where
$Y = A(1) \cdot K$
, where
 $A(1)$
is capital productivity (14) when
$A(1)$
is capital productivity (14) when
 $\alpha =1$
. Since
$\alpha =1$
. Since
 $r$
is increasing in
$r$
is increasing in
 $L/K$
, and as
$L/K$
, and as
 $L/K\to 0$
the marginal product of capital is bounded below by
$L/K\to 0$
the marginal product of capital is bounded below by
 $A(1)$
, it follows that
$A(1)$
, it follows that
 $A(1)$
is also a lower bound on possible values of
$A(1)$
is also a lower bound on possible values of
 $r$
. Meanwhile, the critical interest rate
$r$
. Meanwhile, the critical interest rate
 $r^\ast$
is the steady state rental rate of capital, derived from the entrepreneur Euler equation. Then if
$r^\ast$
is the steady state rental rate of capital, derived from the entrepreneur Euler equation. Then if
 $A(1)\gt r^\ast$
, the rental rate is always above the steady state level, and so no steady state is reached. Then, by the Euler equation, entrepreneur consumption
$A(1)\gt r^\ast$
, the rental rate is always above the steady state level, and so no steady state is reached. Then, by the Euler equation, entrepreneur consumption
 $C_e$
always grows at a rate no less than
$C_e$
always grows at a rate no less than
 $A(1)-r^\ast \gt 0$
, and since
$A(1)-r^\ast \gt 0$
, and since
 $C_e = \rho K$
the capital stock does as well.Footnote
16
$C_e = \rho K$
the capital stock does as well.Footnote
16
In the following sections, we will focus on the case in which a steady state exists. This will allow us to focus on our main goal—to analyze the distributional consequences of an episode of automation, similar to what the developed world is likely to experience over the next few decades.Footnote 17
4. Optimal policy under majority voting
The previous section defined equilibrium only up to the specification of tax rates and transfers
 $\left\{\tau ^k,\tau ^\ell, T^w\right\}$
. Given the central distributional role played by the tax and transfer regime, and the political debates surrounding the distributional consequences of automation, it seems likely that the prospect of automation will induce changes in policy. To examine this interplay of policy and technical change, we endogenize taxes and transfers by supposing policy is set by majority voting, with worker households in the majority, which is empirically the case.Footnote
18
$\left\{\tau ^k,\tau ^\ell, T^w\right\}$
. Given the central distributional role played by the tax and transfer regime, and the political debates surrounding the distributional consequences of automation, it seems likely that the prospect of automation will induce changes in policy. To examine this interplay of policy and technical change, we endogenize taxes and transfers by supposing policy is set by majority voting, with worker households in the majority, which is empirically the case.Footnote
18
While this is a simplified depiction of the political process, it is both tractable and serves as a useful benchmark for what sort of policies the majority of households, which derive most or all of their income from their labor, are likely to desire in response to a major episode of automation. Furthermore, while a strict definition of UBI would require that transfers be the same for all agents in the economy, we associate UBI with transfers to worker
 $T^w$
for two reasons. First, many practical proposals of UBI that have been put forward are partial in nature and have some other restrictive criteria and/or phase out provisions (see Table 2 in Hoynes and Rothstein, Reference Hoynes and Rothstein2019), and workers are an overwhelming proportion of economic agents in the economy and thus are likely to be the main beneficiaries in these proposals. Second, this assumption maximizes the gains to workers by allowing no transfers to entrepreneurs and, thus, provides an upper bound for gains for workers. Yet, in our quantitative exercise, dynamic optimal policy over the transition results in much larger gains to entrepreneurs than to workers. Thus the assumption of no transfers to entrepreneurs may be seen as conservative, as this result would be reinforced if a truly universal transfer were required.
$T^w$
for two reasons. First, many practical proposals of UBI that have been put forward are partial in nature and have some other restrictive criteria and/or phase out provisions (see Table 2 in Hoynes and Rothstein, Reference Hoynes and Rothstein2019), and workers are an overwhelming proportion of economic agents in the economy and thus are likely to be the main beneficiaries in these proposals. Second, this assumption maximizes the gains to workers by allowing no transfers to entrepreneurs and, thus, provides an upper bound for gains for workers. Yet, in our quantitative exercise, dynamic optimal policy over the transition results in much larger gains to entrepreneurs than to workers. Thus the assumption of no transfers to entrepreneurs may be seen as conservative, as this result would be reinforced if a truly universal transfer were required.
To guarantee an interior steady state, we assume that technology satisfies the condition:Footnote 19
 \begin{equation} A(1) \lt \frac{\rho +\gamma +\delta }{1-\omega } \end{equation}
\begin{equation} A(1) \lt \frac{\rho +\gamma +\delta }{1-\omega } \end{equation}
4.1. Statement and solution of the planning problem
We assume that policy is set by majority voting with full commitment. Since we assume that workers are in the majority, this amounts to setting policy to maximize the welfare of workers. Thus we can formulate the problem as a Ramsey Planning problem, with a single state variable (
 $K$
), and solve it as follows:
$K$
), and solve it as follows:
Proposition 2.
The equilibrium under majority voting is equivalent to the solution to the following Ramsey Planning problem: For given
 $K(0)$
, choose
$K(0)$
, choose
 $\{C_w,L,K\}$
to maximize
$\{C_w,L,K\}$
to maximize
 \begin{equation} \max _{\left \{ C_{w},C_{e},K,L\right \} }\left \{ \int e^{-\gamma t}U\left (C_{w},L\right )\right \}, \end{equation}
\begin{equation} \max _{\left \{ C_{w},C_{e},K,L\right \} }\left \{ \int e^{-\gamma t}U\left (C_{w},L\right )\right \}, \end{equation}
subject to constraints
 \begin{equation} \dot{K} = (1-\omega ) F\left (K,L\right )-\delta K - \rho K - C_w \end{equation}
\begin{equation} \dot{K} = (1-\omega ) F\left (K,L\right )-\delta K - \rho K - C_w \end{equation}
and
 $L\geq 0$
. The solution to this problem satisfies the conditions
$L\geq 0$
. The solution to this problem satisfies the conditions
 \begin{equation} U_{C}\left (C_{w},L\right ) =\lambda, \end{equation}
\begin{equation} U_{C}\left (C_{w},L\right ) =\lambda, \end{equation}
 \begin{equation} -U_{L}\left (C_{w},L\right ) \geq \lambda (1-\omega ) F_{L}\left (K,L\right ), \end{equation}
\begin{equation} -U_{L}\left (C_{w},L\right ) \geq \lambda (1-\omega ) F_{L}\left (K,L\right ), \end{equation}
 \begin{equation} -\dot{\lambda }/\lambda =(1-\omega )F_{K}\left (K,L\right )-\delta -\rho -\gamma, \end{equation}
\begin{equation} -\dot{\lambda }/\lambda =(1-\omega )F_{K}\left (K,L\right )-\delta -\rho -\gamma, \end{equation}
together with (
25
) holding with equality, and where (
27
) holds with equality when
 $L\gt 0$
.
$L\gt 0$
.
Proof. See Appendix A.3.
Here equation (25) combines the resource constraint with the entrepreneur consumption rule (10). Notably, this embeds the government budget constraint, and therefore implies variation in transfers as well as tax rates, which would not be possible if the planner did not have access to a transfer to workers as a policy instrument.
Proposition2 gives conditions which define paths of
 $\{C_w,K,L,\lambda \}$
under majority voting, which likewise define
$\{C_w,K,L,\lambda \}$
under majority voting, which likewise define
 $C_e = \rho K$
.Footnote
20
To understand its implications for optimal policy, we first characterize the steady state, and then consider the transition.
$C_e = \rho K$
.Footnote
20
To understand its implications for optimal policy, we first characterize the steady state, and then consider the transition.
4.2. Optimal policy in the long run
Consider the equilibrium under optimal policy, as given by Proposition2. Given that technology is stationary and
 $A(1)$
satisfies condition (23), in the long run the economy will converge to a steady state. Corollary (1) characterizes equilibrium quantities and policy variables that prevail in this steady state.
$A(1)$
satisfies condition (23), in the long run the economy will converge to a steady state. Corollary (1) characterizes equilibrium quantities and policy variables that prevail in this steady state.
Corollary 1.
Under majority voting and stationary technology that satisfies (
23
), a steady state is reached in which
 $\{K,L,C_w\}$
satisfy:
$\{K,L,C_w\}$
satisfy:
 \begin{equation} -\frac{U_{L}\left (C_{w},L\right )}{U_{C}\left (C_{w},L\right )} =(1-\omega )F_{L}\left (K,L\right ), \end{equation}
\begin{equation} -\frac{U_{L}\left (C_{w},L\right )}{U_{C}\left (C_{w},L\right )} =(1-\omega )F_{L}\left (K,L\right ), \end{equation}
 \begin{equation} C_{w} =(1-\omega )F\left (K,L\right )-\left (\rho +\delta \right )K, \end{equation}
\begin{equation} C_{w} =(1-\omega )F\left (K,L\right )-\left (\rho +\delta \right )K, \end{equation}
 \begin{equation} F_{K}\left (K,L\right ) =\frac{\rho +\gamma +\delta }{1-\omega } = r^\ast . \end{equation}
\begin{equation} F_{K}\left (K,L\right ) =\frac{\rho +\gamma +\delta }{1-\omega } = r^\ast . \end{equation}
Steady state tax rates and transfers satisfy:
 \begin{equation} \tau ^{\ell } =\omega, \end{equation}
\begin{equation} \tau ^{\ell } =\omega, \end{equation}
 \begin{equation} \tau ^{k} =\omega +\frac{\left (1-\omega \right )\gamma }{\rho +\delta +\gamma } \equiv \omega +\frac{\gamma }{r^{\ast }}, \end{equation}
\begin{equation} \tau ^{k} =\omega +\frac{\left (1-\omega \right )\gamma }{\rho +\delta +\gamma } \equiv \omega +\frac{\gamma }{r^{\ast }}, \end{equation}
 \begin{equation} T^w = \gamma K. \end{equation}
\begin{equation} T^w = \gamma K. \end{equation}
Proof. See Appendix A.3.
Equations (29) – (31) jointly define
 $\{L,C_w,K\}$
, which imply a long-run marginal product of capital equal to
$\{L,C_w,K\}$
, which imply a long-run marginal product of capital equal to
 $r^\ast$
. The long-run taxes and transfers that implement this equilibrium are given by equations (32) – (34). Notably, long-run tax rates are independent of technology, and only depend on the government consumption share, depreciation, and the discount rates of entrepreneurs and workers. The steady state capital tax rate is always higher than
$r^\ast$
. The long-run taxes and transfers that implement this equilibrium are given by equations (32) – (34). Notably, long-run tax rates are independent of technology, and only depend on the government consumption share, depreciation, and the discount rates of entrepreneurs and workers. The steady state capital tax rate is always higher than
 $\omega$
, and therefore higher than the labor tax rate.Footnote
21
$\omega$
, and therefore higher than the labor tax rate.Footnote
21
To gain intuition for these results, it is helpful to first consider the case of a representative agent economy. In this case, the optimal transfer would be zero, and optimal taxes on labor and capital would both equal the share of government spending
 $\omega$
(and in particular would be zero when
$\omega$
(and in particular would be zero when
 $\omega =0$
). Intuitively, in the absence of government spending linked directly to GDP, households would not choose to distort the labor or capital markets at all, since at the margin the only purpose of taxing would be to transfer funds to themselves. By contrast, when government spending is a share of GDP, a fraction of any increase in production goes to increased government spending, which has no benefit to households, and thus is perceived by them as a tax on production. Therefore, they optimally choose to internalize this cost by setting the labor and capital taxes equal to the share of marginal GDP consumed by the government.
$\omega =0$
). Intuitively, in the absence of government spending linked directly to GDP, households would not choose to distort the labor or capital markets at all, since at the margin the only purpose of taxing would be to transfer funds to themselves. By contrast, when government spending is a share of GDP, a fraction of any increase in production goes to increased government spending, which has no benefit to households, and thus is perceived by them as a tax on production. Therefore, they optimally choose to internalize this cost by setting the labor and capital taxes equal to the share of marginal GDP consumed by the government.
Compare this with the present model with workers and entrepreneurs. Here there is an additional purpose of taxes—to transfer funds from entrepreneurs to workers. Since entrepreneurs earn no labor income, this motive provides no incentive to raise labor taxes, and therefore
 $\tau ^\ell$
remains unchanged. By contrast, capital taxes allow the net transfer of funds from entrepreneurs to workers, which has two effects. First there is the direct effect of higher consumption due to the transfer. This is counterbalanced by an indirect pecuniary effect, since higher capital taxes lead to lower capital, which lowers
$\tau ^\ell$
remains unchanged. By contrast, capital taxes allow the net transfer of funds from entrepreneurs to workers, which has two effects. First there is the direct effect of higher consumption due to the transfer. This is counterbalanced by an indirect pecuniary effect, since higher capital taxes lead to lower capital, which lowers
 $w/r$
and reduces the relative income of workers.Footnote
22
Thus optimal policy involves an intertemporal tradeoff between current and future consumption of workers. Nevertheless, the net effect of this tradeoff is that the capital tax rate will rise above
$w/r$
and reduces the relative income of workers.Footnote
22
Thus optimal policy involves an intertemporal tradeoff between current and future consumption of workers. Nevertheless, the net effect of this tradeoff is that the capital tax rate will rise above
 $\omega$
, with the proceeds from the excess portion transferred to workers. This occurs for two reasons. First, entrepreneurs consume flow consumption
$\omega$
, with the proceeds from the excess portion transferred to workers. This occurs for two reasons. First, entrepreneurs consume flow consumption
 $C_e = \rho K$
, which from the perspective of workers acts as a tax on capital, effectively lowering the return on investment. Thus the planner raises capital taxes by
$C_e = \rho K$
, which from the perspective of workers acts as a tax on capital, effectively lowering the return on investment. Thus the planner raises capital taxes by
 $\rho /r^\ast$
, so that entrepreneurs internalize this “tax” and reduce investment accordingly. Second, since workers are more impatient than entrepreneurs, they prefer a lower rate of investment. To bring this about, the planner raises the capital tax rate by
$\rho /r^\ast$
, so that entrepreneurs internalize this “tax” and reduce investment accordingly. Second, since workers are more impatient than entrepreneurs, they prefer a lower rate of investment. To bring this about, the planner raises the capital tax rate by
 $(\gamma -\rho )/r^\ast$
. Summing these two motives yields an increase in the tax rate of
$(\gamma -\rho )/r^\ast$
. Summing these two motives yields an increase in the tax rate of
 $\gamma /r^\ast$
relative to the representative agent economy. The proceeds from these higher taxes are transferred to workers, and thus workers receive a flow transfer equal to a fixed fraction
$\gamma /r^\ast$
relative to the representative agent economy. The proceeds from these higher taxes are transferred to workers, and thus workers receive a flow transfer equal to a fixed fraction
 $\gamma$
of the economy’s capital stock.
$\gamma$
of the economy’s capital stock.
4.3. Optimal policy over the transition
It is also instructive to analyze how the path of taxes and transfers relates to other macroeconomic variables during transition to develop intuition for the character of the optimal policy. For this purpose, it is not necessary to calculate explicit expressions for these policy variables in terms of exogenous parameters as done above in Corollary1. Instead, it is enough to relate them to the paths of the other macroeconomic variables as in:
Corollary 2. During transition the optimal policy under majority voting is related to other macroeconomic variables as follows:
 \begin{equation} \tau ^\ell = \omega, \end{equation}
\begin{equation} \tau ^\ell = \omega, \end{equation}
 \begin{equation} \tau ^{k} = \omega +\frac{\gamma -\dot{\lambda }/\lambda -\dot{K}/K}{F_K}, \end{equation}
\begin{equation} \tau ^{k} = \omega +\frac{\gamma -\dot{\lambda }/\lambda -\dot{K}/K}{F_K}, \end{equation}
 \begin{equation} T^w = \left (\gamma -\dot{\lambda }/\lambda -\dot{K}/K\right )K, \end{equation}
\begin{equation} T^w = \left (\gamma -\dot{\lambda }/\lambda -\dot{K}/K\right )K, \end{equation}

Proof. See Appendix A.3.
Corollary2 shows that, in line with our discussion of optimal policy above, the labor tax rate remains fixed at the government expenditure share
 $\omega$
throughout. However, the capital tax rate and transfers will differ from their long-run level over the course of the transition. This occurs for two reasons. The first relates to the tradeoff between the direct consumption effect of the transfer and its indirect pecuniary effect. When capital is below its long-run level, there is both a smaller direct consumption effect (since there is less capital income to tax), and a greater pecuniary effect (since the marginal effect of more capital on wages is larger when there is less capital). Thus the optimal tax rate and transfer are both increasing in capital, as can be seen by their respective dependence on
$\omega$
throughout. However, the capital tax rate and transfers will differ from their long-run level over the course of the transition. This occurs for two reasons. The first relates to the tradeoff between the direct consumption effect of the transfer and its indirect pecuniary effect. When capital is below its long-run level, there is both a smaller direct consumption effect (since there is less capital income to tax), and a greater pecuniary effect (since the marginal effect of more capital on wages is larger when there is less capital). Thus the optimal tax rate and transfer are both increasing in capital, as can be seen by their respective dependence on
 $F_K$
and
$F_K$
and
 $K$
. However, their dynamics differ somewhat in that the optimal tax rate depends on the marginal product of capital, which varies directly with technology, while the optimal transfer depends only on the capital stock.
$K$
. However, their dynamics differ somewhat in that the optimal tax rate depends on the marginal product of capital, which varies directly with technology, while the optimal transfer depends only on the capital stock.
Second, as is typical in intertemporal optimization problems, the intertemporal marginal rate of substitution affects the optimal investment rate. For the planner, the relevant rate is the growth rate of workers’ marginal utility of consumption
 $\dot{\lambda }/\lambda$
, whereas entrepreneurs’ marginal utility grows at the rate
$\dot{\lambda }/\lambda$
, whereas entrepreneurs’ marginal utility grows at the rate
 $-\dot{C}_e/C_e = -\dot{K}/K$
(given log utility, and since
$-\dot{C}_e/C_e = -\dot{K}/K$
(given log utility, and since
 $C_e = \rho K$
). Thus the capital tax is increased by
$C_e = \rho K$
). Thus the capital tax is increased by
 $({-}\dot{\lambda }/\lambda ) - \dot{K}/K$
, so that entrepreneurs internalize this difference in the desired rate of intertemporal substitution. Intuitively, if this term is positive it implies that workers have a greater desire to smooth consumption over time than entrepreneurs, and thus choose to raise capital taxes to transfer funds to themselves for current consumption.
$({-}\dot{\lambda }/\lambda ) - \dot{K}/K$
, so that entrepreneurs internalize this difference in the desired rate of intertemporal substitution. Intuitively, if this term is positive it implies that workers have a greater desire to smooth consumption over time than entrepreneurs, and thus choose to raise capital taxes to transfer funds to themselves for current consumption.
5. Long-run consequences of technical change
We now turn to analyzing the consequences of an episode of technical change under majority voting, with particular attention to the distributional implications. We first focus on the long term, which involves a comparison of steady states before and after a change in technology. For tractability and clarity of results, we focus on a stylized but very useful form of technology, in which the capital task productivity is a piecewise linear function:
 \begin{equation} a(i)=\left\{\begin{array}{l@{\quad}l} a & \text{for }0\leq i\leq \bar{\alpha }\\[4pt] 0 & \text{for }\bar{\alpha }\lt i\leq 1. \end{array}\right. \end{equation}
\begin{equation} a(i)=\left\{\begin{array}{l@{\quad}l} a & \text{for }0\leq i\leq \bar{\alpha }\\[4pt] 0 & \text{for }\bar{\alpha }\lt i\leq 1. \end{array}\right. \end{equation}
Thus, capital can perform a fraction
 $\bar{\alpha }$
of tasks (for
$\bar{\alpha }$
of tasks (for
 $i\in [0,\bar{\alpha }]$
) at the same level of efficiency denoted by efficiency parameter
$i\in [0,\bar{\alpha }]$
) at the same level of efficiency denoted by efficiency parameter
 $a$
. However, it cannot perform other tasks,
$a$
. However, it cannot perform other tasks,
 $i \in \left (\bar{\alpha }, 1\right ]$
at all.Footnote
23
$i \in \left (\bar{\alpha }, 1\right ]$
at all.Footnote
23
In this stylized representation, traditional technical progress—which we construe as increased efficiency in performing tasks currently being performed by capital—can be viewed as an increase in parameter,
 $a$
. In contrast, automation—which is considered to be the ability of capital to do tasks that earlier could only be done by labor—naturally can be thought of as an increase in
$a$
. In contrast, automation—which is considered to be the ability of capital to do tasks that earlier could only be done by labor—naturally can be thought of as an increase in
 $\bar{\alpha }$
. Thus, in this task-based production representation, we can think of traditional technical progress as progress on the intensive margin (ability to better accomplish the tasks that can be already done) whereas automation can be thought of as progress on the extensive margin (ability to do tasks that could not be done earlier).
$\bar{\alpha }$
. Thus, in this task-based production representation, we can think of traditional technical progress as progress on the intensive margin (ability to better accomplish the tasks that can be already done) whereas automation can be thought of as progress on the extensive margin (ability to do tasks that could not be done earlier).
To focus attention on the empirically relevant case, we assume that
 $a$
satisfies
$a$
satisfies
 \begin{equation} a \gt \frac{\rho +\gamma +\delta }{1-\omega } = r^\ast \end{equation}
\begin{equation} a \gt \frac{\rho +\gamma +\delta }{1-\omega } = r^\ast \end{equation}
and that condition (23) holds throughout.Footnote
24
These assumptions together imply that a steady state with strictly positive capital is reached. Thus Corollary1 applies, and the steady state rental rate of capital satisfies
 $r=r^\ast$
, as defined in (31). Since
$r=r^\ast$
, as defined in (31). Since
 $r^\ast$
does not depend on technological parameters, it remains constant under the technical shifts considered in this section, and it frequently appears in the expressions we derive.
$r^\ast$
does not depend on technological parameters, it remains constant under the technical shifts considered in this section, and it frequently appears in the expressions we derive.
5.1. Uniform labor productivity
We now turn to characterizing the long-term effects of an episode of technical change. But first we need to make an assumption about labor productivity. Here we assume that labor productivity is uniform across tasks, and for convenience is normalized to
 $1$
, that is,
$1$
, that is,
 $b(i)=1$
for
$b(i)=1$
for
 $i \in [0,1]$
. We can then derive simple expressions for major steady state quantities:
$i \in [0,1]$
. We can then derive simple expressions for major steady state quantities:
Proposition 3.
Given that
 $a(i)$
satisfies (
38
),
$a(i)$
satisfies (
38
),
 $b(i)=1$
, and that conditions (
23
) and (
39
) hold, in steady state we have
$b(i)=1$
, and that conditions (
23
) and (
39
) hold, in steady state we have
 $\alpha = \bar{\alpha }$
, and
$\alpha = \bar{\alpha }$
, and
 \begin{equation} K/L = \bar{\alpha }\left (1-\bar{\alpha }\right )^{\frac{1}{\sigma -1}}\left ((r^{*}/a)^{\sigma -1}-\bar{\alpha }\right )^{\frac{\sigma }{1-\sigma }}/a \gt 0,\end{equation}
\begin{equation} K/L = \bar{\alpha }\left (1-\bar{\alpha }\right )^{\frac{1}{\sigma -1}}\left ((r^{*}/a)^{\sigma -1}-\bar{\alpha }\right )^{\frac{\sigma }{1-\sigma }}/a \gt 0,\end{equation}
 \begin{equation} Y = \left (\left (\bar{\alpha }\right )^{\frac{1}{\sigma }}\left (aK\right )^{\frac{\sigma -1}{\sigma }}+\left (1-\bar{\alpha }\right )^{\frac{1}{\sigma }}L^{\frac{\sigma -1}{\sigma }}\right )^{\frac{\sigma }{\sigma -1}}, \end{equation}
\begin{equation} Y = \left (\left (\bar{\alpha }\right )^{\frac{1}{\sigma }}\left (aK\right )^{\frac{\sigma -1}{\sigma }}+\left (1-\bar{\alpha }\right )^{\frac{1}{\sigma }}L^{\frac{\sigma -1}{\sigma }}\right )^{\frac{\sigma }{\sigma -1}}, \end{equation}
 \begin{equation} s_{L} =1-\bar{\alpha }\left (r^{\ast }/a\right )^{1-\sigma } \in (0,1), \end{equation}
\begin{equation} s_{L} =1-\bar{\alpha }\left (r^{\ast }/a\right )^{1-\sigma } \in (0,1), \end{equation}
 \begin{equation} w = \left (\frac{1-\bar{\alpha }}{s_{L}}\right )^{\frac{1}{\sigma -1}}, \end{equation}
\begin{equation} w = \left (\frac{1-\bar{\alpha }}{s_{L}}\right )^{\frac{1}{\sigma -1}}, \end{equation}
where
 $s_L = wL/Y$
is the labor share.
$s_L = wL/Y$
is the labor share.
Proof. See Appendix A.4.
Note that, while steady state capital and output are defined only up to steady state labor supply, which depends on equations (2) and (3) as well, the steady state wage and labor share do not depend on
 $L$
. This is convenient, as we are chiefly interested in the distributional implications of automation, which we summarize using the labor share and the wage. These depend on the share of tasks done by capital
$L$
. This is convenient, as we are chiefly interested in the distributional implications of automation, which we summarize using the labor share and the wage. These depend on the share of tasks done by capital
 $\bar{\alpha }$
, and on the ratio between capital task productivity
$\bar{\alpha }$
, and on the ratio between capital task productivity
 $a$
and the long-run rental rate of capital, which satisfies
$a$
and the long-run rental rate of capital, which satisfies
 $r=r^\ast$
.Footnote
25
$r=r^\ast$
.Footnote
25
The expressions in Proposition3 immediately yield the following comparative statics for traditional technical progress and automation for the wage and labor share:
Corollary 3.
Traditional technical progress, that is, an increase in capital task productivity
 $a$
, increases the steady state wage, whereas the steady state labor share of income (i) increases for
$a$
, increases the steady state wage, whereas the steady state labor share of income (i) increases for
 $\sigma \lt 1$
; (ii) remains constant for
$\sigma \lt 1$
; (ii) remains constant for
 $\sigma =1$
(the Cobb-Douglas case); and (iii) decreases for
$\sigma =1$
(the Cobb-Douglas case); and (iii) decreases for
 $\sigma \gt 1$
. In particular,
$\sigma \gt 1$
. In particular,
 \begin{equation} \frac{dw}{da}\frac{a}{w}=\frac{1-s_{L}}{s_{L}} \gt 0 \end{equation}
\begin{equation} \frac{dw}{da}\frac{a}{w}=\frac{1-s_{L}}{s_{L}} \gt 0 \end{equation}
and
 \begin{equation} \frac{ds_{L}}{da}\frac{a}{s_{L}}=\left (1-\sigma \right )\left (\frac{1-s_{L}}{s_{L}}\right )\gtreqqless 0\qquad as\qquad \sigma \lesseqqgtr 1. \end{equation}
\begin{equation} \frac{ds_{L}}{da}\frac{a}{s_{L}}=\left (1-\sigma \right )\left (\frac{1-s_{L}}{s_{L}}\right )\gtreqqless 0\qquad as\qquad \sigma \lesseqqgtr 1. \end{equation}
where
 $s_L$
satisfies (
51
).
$s_L$
satisfies (
51
).
Proof. See Appendix A.4.
Corollary 4.
Automation, that is, an increase in the automated share of tasks
 $\bar{\alpha }$
, increases the steady state wage but decreases the steady state labor share. In particular,
$\bar{\alpha }$
, increases the steady state wage but decreases the steady state labor share. In particular,
 \begin{equation} \frac{dw}{d\bar{\alpha }}\frac{\bar{\alpha }}{w}=\frac{1}{\sigma -1}\left (\frac{1}{s_{L}}-\frac{1}{1-\bar{\alpha }}\right )\gt 0 \end{equation}
\begin{equation} \frac{dw}{d\bar{\alpha }}\frac{\bar{\alpha }}{w}=\frac{1}{\sigma -1}\left (\frac{1}{s_{L}}-\frac{1}{1-\bar{\alpha }}\right )\gt 0 \end{equation}
and
 \begin{equation} \frac{ds_{L}}{d\bar{\alpha }}\frac{\bar{\alpha }}{s_L}=-\left (\frac{1-s_{L}}{s_L}\right )\lt 0 \end{equation}
\begin{equation} \frac{ds_{L}}{d\bar{\alpha }}\frac{\bar{\alpha }}{s_L}=-\left (\frac{1-s_{L}}{s_L}\right )\lt 0 \end{equation}
where
 $s_L$
satisfies (
42
).
$s_L$
satisfies (
42
).
Proof. See Appendix A.4.
Intuitively, traditional technical progress increases the wage, since this corresponds to increasing the effective capital supply, and capital is a complement of labor. It is likewise natural that changes in the labor share depend on
 $\sigma$
, i.e., the degree of substitutability between capital and labor. As is well known, when
$\sigma$
, i.e., the degree of substitutability between capital and labor. As is well known, when
 $\sigma =1$
the opposing substitution effect and the Edgeworth complementarity exactly cancel each other and the labor share is constant. When
$\sigma =1$
the opposing substitution effect and the Edgeworth complementarity exactly cancel each other and the labor share is constant. When
 $\sigma \gt 1$
, the substitution effect dominates causing the labor share to decline despite the increase in wages, whereas the reverse is true for
$\sigma \gt 1$
, the substitution effect dominates causing the labor share to decline despite the increase in wages, whereas the reverse is true for
 $\sigma \lt 1$
.
$\sigma \lt 1$
.
As shown in Corollary4, automation also results in an increase in the steady state wage, mainly due to the increase in steady state capital. However, the effect of automation on the labor share, unlike that of traditional technical progress, does not depend on the elasticity of substitution
 $\sigma$
. This is a vital difference that speaks to the current debate centered around automation and associated policy proposals like universal basic income. The key to this difference lies intuitively in the fact that the effect of automation manifests as substitution within tasks (or at the task level), whereas the effect of traditional technical progress (
$\sigma$
. This is a vital difference that speaks to the current debate centered around automation and associated policy proposals like universal basic income. The key to this difference lies intuitively in the fact that the effect of automation manifests as substitution within tasks (or at the task level), whereas the effect of traditional technical progress (
 $a$
) operates between tasks (or across tasks at the aggregate level). Thus, the distributional effects of automation are mainly driven by perfect substitutability of capital and labor within a task whereas the effects of traditional technical progress depend on the degree of substitutability of capital and labor between tasks (i.e.
$a$
) operates between tasks (or across tasks at the aggregate level). Thus, the distributional effects of automation are mainly driven by perfect substitutability of capital and labor within a task whereas the effects of traditional technical progress depend on the degree of substitutability of capital and labor between tasks (i.e.
 $\sigma$
). Moreover, since this difference between the degree of substitutability (between capital and labor) within and between tasks is larger when
$\sigma$
). Moreover, since this difference between the degree of substitutability (between capital and labor) within and between tasks is larger when
 $\sigma \lt 1$
, the qualitative effects of automation compared to traditional technical progress are worse in this case compared to when
$\sigma \lt 1$
, the qualitative effects of automation compared to traditional technical progress are worse in this case compared to when
 $\sigma \gt 1$
. This is substantiated by the fact that when
$\sigma \gt 1$
. This is substantiated by the fact that when
 $\sigma \lt 1$
an increase in
$\sigma \lt 1$
an increase in
 $a$
increases the labor share of income whereas it falls for an increase in
$a$
increases the labor share of income whereas it falls for an increase in
 $\bar{\alpha }$
, but when
$\bar{\alpha }$
, but when
 $\sigma \gt 1$
the labor share of income falls in both scenarios.Footnote
26
$\sigma \gt 1$
the labor share of income falls in both scenarios.Footnote
26
5.2. Variable labor productivity and wage declines
The result in Corollary4 that automation necessarily raises wages in the long run may be taken as evidence against concerns about automation harming human labor. However, this result depended on our assumption of constant labor productivity across tasks. By contrast, if labor productivity differs across tasks, and relatively high productivity tasks are automated, automation may lower wages.
To illustrate this possibility, suppose that capital productivity is piecewise across tasks as given by (38), and that labor productivity
 $b(i)$
is now
$b(i)$
is now
 \begin{equation} b\left (i\right )=\begin{cases} b_{m} & i\in [0,\bar{\alpha }_{1}]\\[5pt] b_{1} & i\in (\bar{\alpha }_{1},1] \end{cases}. \end{equation}
\begin{equation} b\left (i\right )=\begin{cases} b_{m} & i\in [0,\bar{\alpha }_{1}]\\[5pt] b_{1} & i\in (\bar{\alpha }_{1},1] \end{cases}. \end{equation}
Then we consider an episode of automation that shifts
 $\bar{\alpha }$
from some level below
$\bar{\alpha }$
from some level below
 $\bar{\alpha }_1$
to
$\bar{\alpha }_1$
to
 $\bar{\alpha }_1$
. That is,
$\bar{\alpha }_1$
. That is,
 $b_m$
is the productivity of the marginal tasks automated in this episode of automation, whereas
$b_m$
is the productivity of the marginal tasks automated in this episode of automation, whereas
 $b_1$
is the productivity of the remaining tasks at its end. Then we can derive a simple condition under which the steady state wage declines:
$b_1$
is the productivity of the remaining tasks at its end. Then we can derive a simple condition under which the steady state wage declines:
Proposition 4.
Suppose that capital productivity is given by (
38
) and labor productivity by (
48
). Suppose that initially the economy is in steady state with
 $\bar{\alpha } = \bar{\alpha }_0 \lt \bar{\alpha }_1$
, and then there is a one-time shift in the capital productivity curve to
$\bar{\alpha } = \bar{\alpha }_0 \lt \bar{\alpha }_1$
, and then there is a one-time shift in the capital productivity curve to
 $\bar{\alpha } = \bar{\alpha }_1$
. Then the steady state wage declines if and only if
$\bar{\alpha } = \bar{\alpha }_1$
. Then the steady state wage declines if and only if
 \begin{equation} \frac{b_{m}}{b_{1}}\gt \left [\frac{\left (a/r^{\ast }\right )^{1-\sigma }-\bar{\alpha }_{1}}{1-\bar{\alpha }_{1}}\right ]^{\frac{1}{1-\sigma }}. \end{equation}
\begin{equation} \frac{b_{m}}{b_{1}}\gt \left [\frac{\left (a/r^{\ast }\right )^{1-\sigma }-\bar{\alpha }_{1}}{1-\bar{\alpha }_{1}}\right ]^{\frac{1}{1-\sigma }}. \end{equation}
Proof. See Appendix A.5.
As we previously assumed
 $a\gt r^{\ast }$
, condition (49) will never be satisfied for
$a\gt r^{\ast }$
, condition (49) will never be satisfied for
 $b_{m}\leq b_{1}$
, that is, when the productivity of tasks automated is equal to or lower than the productivity of remaining tasks. However, when
$b_{m}\leq b_{1}$
, that is, when the productivity of tasks automated is equal to or lower than the productivity of remaining tasks. However, when
 $b_m \gt b_1$
, this condition may be satisfied, and thus it is possible for the wage to decline in the long run. Whether this condition holds depends on the relative productivity of the automated tasks to the remaining tasks
$b_m \gt b_1$
, this condition may be satisfied, and thus it is possible for the wage to decline in the long run. Whether this condition holds depends on the relative productivity of the automated tasks to the remaining tasks
 $b_m/b_1$
, the degree of substitutability between capital and labor
$b_m/b_1$
, the degree of substitutability between capital and labor
 $\sigma$
, and the ratio of capital task productivity to the steady state rental rate of capital
$\sigma$
, and the ratio of capital task productivity to the steady state rental rate of capital
 $a/r^\ast$
. The last matters because this determines the level of steady state capital.
$a/r^\ast$
. The last matters because this determines the level of steady state capital.
6. Quantitative model
We now turn to a quantitative analysis of an episode of automation, using a version of our model calibrated to US data. For tractability, we assume that technology takes the piecewise form of equation (38). As mentioned above, this specification allows an easy and intuitive separation of the effects of traditional technical progress and automation. We model an episode of automation as a one-time unanticipated increase in
 $\bar{\alpha }$
from
$\bar{\alpha }$
from
 $\bar{\alpha }_{o}$
to
$\bar{\alpha }_{o}$
to
 $\bar{\alpha }_{1}\gt \bar{\alpha }_{o}$
, starting in steady state.
$\bar{\alpha }_{1}\gt \bar{\alpha }_{o}$
, starting in steady state.
We begin by discussing the calibration of the model, followed by a discussion of the initial steady state and policy under majority voting. We then analyze an episode of automation.
6.1. Calibration
For the quantitative exercise, we choose parameter values that are very standard in the macro/real business cycle literature, and/or based on the data. We calibrate the model so that the initial steady state is typical in terms of tax rates, the ratio of consumption to output, the labor income share, and the ratio of capital to output, among other variables. The initial steady state of the calibrated model is shown in Table 1.
Initial steady states with calibrated policy vs. majority voting:
 $\sigma =0.8$
$\sigma =0.8$

For
 $\sigma$
, the elasticity of substitution between capital and labor, the neoclassical literature typically assumes a value of 1, which corresponds to the Cobb-Douglas case. However, as Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b) note, there is considerable debate on its value and, in particular, on whether it is less than or greater than 1. While recent estimates in Karabarbounis and Neiman (Reference Karabarbounis and Neiman2014) put it to be greater than one, the bulk of the earlier evidence in the literature points to a value between 0.5 and 1 (for further discussion, see Oberfield and Raval (Reference Oberfield and Raval2021) and references therein). We follow Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b) in viewing the consensus in the literature as more supportive of a value of
$\sigma$
, the elasticity of substitution between capital and labor, the neoclassical literature typically assumes a value of 1, which corresponds to the Cobb-Douglas case. However, as Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b) note, there is considerable debate on its value and, in particular, on whether it is less than or greater than 1. While recent estimates in Karabarbounis and Neiman (Reference Karabarbounis and Neiman2014) put it to be greater than one, the bulk of the earlier evidence in the literature points to a value between 0.5 and 1 (for further discussion, see Oberfield and Raval (Reference Oberfield and Raval2021) and references therein). We follow Acemoglu and Restrepo (Reference Acemoglu and Restrepo2018b) in viewing the consensus in the literature as more supportive of a value of
 $\sigma$
below
$\sigma$
below
 $1$
, and thus set
$1$
, and thus set
 $\sigma =0.8$
as our baseline calibration. However, given the debate around its value, we also consider the value of
$\sigma =0.8$
as our baseline calibration. However, given the debate around its value, we also consider the value of
 $\sigma =1.2$
, but since the main result of the paper (and also overall results) are very similar, as explained later the
$\sigma =1.2$
, but since the main result of the paper (and also overall results) are very similar, as explained later the
 $\sigma =1.2$
case is relegated to an appendix.Footnote
27
$\sigma =1.2$
case is relegated to an appendix.Footnote
27
We assume that workers have log utility, as given in equation (4). Log utility is a standard and tractable assumption, and implies a moderate intertemporal elasticity of substitution. We set the entrepreneurs’ discount rate
 $\rho$
to .04 which implies an annual real interest rate of 4%, a standard value in quantitative macro models (e.g. as in Atolia et al. (Reference Atolia, Chatterjee and Turnovsky2010)). As it is common to assume that workers are more impatient than entrepreneurs, we set their discount rate
$\rho$
to .04 which implies an annual real interest rate of 4%, a standard value in quantitative macro models (e.g. as in Atolia et al. (Reference Atolia, Chatterjee and Turnovsky2010)). As it is common to assume that workers are more impatient than entrepreneurs, we set their discount rate
 $\gamma$
to .06.
$\gamma$
to .06.
 $\delta =.05$
corresponds to a 5% depreciation rate for capital, which is a standard value in the literature.Footnote
28
It is also very close to the average US depreciation rate for 1960–2022 of 4.96%, and allows our calibrated model to closely match the US capital-output ratio over the same period (2.90 vs. 2.93).Footnote
29
In a similar vein, we set
$\delta =.05$
corresponds to a 5% depreciation rate for capital, which is a standard value in the literature.Footnote
28
It is also very close to the average US depreciation rate for 1960–2022 of 4.96%, and allows our calibrated model to closely match the US capital-output ratio over the same period (2.90 vs. 2.93).Footnote
29
In a similar vein, we set
 $\phi =1.4$
, which implies a labor supply of
$\phi =1.4$
, which implies a labor supply of
 $L=.339$
in our calibrated model.Footnote
30
$L=.339$
in our calibrated model.Footnote
30
For tax rates, we use the calculations in Fernández-Villaverde et al., (Reference Fernández-Villaverde, Guerrón-Quintana, Kuester and Rubio-Ramírez2015) updated to more recent data, and we use OECD data for government transfers.Footnote
31
Taxes and transfers are averaged over the period 2007 to 2019, which excludes the COVID-19 pandemic and post-pandemic years. The tax rate on labor
 $\tau ^\ell$
comes to 23.1 percent and the capital tax rate
$\tau ^\ell$
comes to 23.1 percent and the capital tax rate
 $\tau ^k$
amounts to 31.9 percent. The transfer as a percentage of GDP is 17.4. Using these values, the share of government consumption,
$\tau ^k$
amounts to 31.9 percent. The transfer as a percentage of GDP is 17.4. Using these values, the share of government consumption,
 $G$
, as a share of GDP,
$G$
, as a share of GDP,
 $\omega$
, is computed residually to satisfy the government’s budget constraint and amounts to 9.07 percent, as noted in Table 1. We do not include consumption taxes. Under our calibration, including consumption taxes would increase taxes collected but would go entirely to funding a larger
$\omega$
, is computed residually to satisfy the government’s budget constraint and amounts to 9.07 percent, as noted in Table 1. We do not include consumption taxes. Under our calibration, including consumption taxes would increase taxes collected but would go entirely to funding a larger
 $G$
, as transfers are directly calibrated from data while
$G$
, as transfers are directly calibrated from data while
 $G$
is calculated residually.
$G$
is calculated residually.
Next we discuss the technology. We normalize labor task productivity to
 $b(i)=1$
. As mentioned above, capital task productivity takes the piecewise form of equation (38). Given the values of
$b(i)=1$
. As mentioned above, capital task productivity takes the piecewise form of equation (38). Given the values of
 $\rho$
,
$\rho$
,
 $\delta$
,
$\delta$
,
 $\sigma$
, and
$\sigma$
, and
 $\tau ^k$
, the values of
$\tau ^k$
, the values of
 $a$
and
$a$
and
 $\bar{\alpha }_o$
together determine the capital share of income, for which the mid-point estimate over 1972–2012 is slightly below 38 percent (see Figure II in Karabarbounis and Neiman (Reference Karabarbounis and Neiman2014)). Also, the value of
$\bar{\alpha }_o$
together determine the capital share of income, for which the mid-point estimate over 1972–2012 is slightly below 38 percent (see Figure II in Karabarbounis and Neiman (Reference Karabarbounis and Neiman2014)). Also, the value of
 $a$
must be sufficiently large to satisfy (16) so that tasks with
$a$
must be sufficiently large to satisfy (16) so that tasks with
 $i\lt \bar{\alpha }$
are done by capital in steady state. With these considerations in view, we set
$i\lt \bar{\alpha }$
are done by capital in steady state. With these considerations in view, we set
 $\bar{\alpha }_0=.5$
and
$\bar{\alpha }_0=.5$
and
 $a=0.5$
, which yield a capital income share of 38.3 percent.
$a=0.5$
, which yield a capital income share of 38.3 percent.
To calibrate the new higher value of
 $\bar{\alpha }=\bar{\alpha }_1$
after the episode of automation, we discipline our choice with the past experience of a declining labor share documented by Karabarbounis and Neiman (Reference Karabarbounis and Neiman2014). In their Figure II, we see the share of labor declining by about 5 percentage points from about 65 to 60 percent over the 37-year period of 1975–2012. Since our focus is on the new wave of automation arising from recent major breakthroughs in robotics and AI, which based on our theoretical results in Corollaries3 and 4 is likely to lead to a larger decline in the labor share than past episodes of technical progress, we choose a value of
$\bar{\alpha }=\bar{\alpha }_1$
after the episode of automation, we discipline our choice with the past experience of a declining labor share documented by Karabarbounis and Neiman (Reference Karabarbounis and Neiman2014). In their Figure II, we see the share of labor declining by about 5 percentage points from about 65 to 60 percent over the 37-year period of 1975–2012. Since our focus is on the new wave of automation arising from recent major breakthroughs in robotics and AI, which based on our theoretical results in Corollaries3 and 4 is likely to lead to a larger decline in the labor share than past episodes of technical progress, we choose a value of
 $\bar{\alpha }_1$
to target a 10 percentage point decline in the labor share. This requires setting
$\bar{\alpha }_1$
to target a 10 percentage point decline in the labor share. This requires setting
 $\bar{\alpha }_1 = 0.6249$
, which implies output increases by 106% in the long run.
$\bar{\alpha }_1 = 0.6249$
, which implies output increases by 106% in the long run.
As argued in Atolia et al. (Reference Atolia, Chatterjee and Turnovsky2012), it is more natural to assume that an increase in productivity like this will happen gradually over time. Therefore, to have a realistic assessment of the dynamics, the increase in
 $\bar{\alpha }$
is allowed to occur gradually. In particular,
$\bar{\alpha }$
is allowed to occur gradually. In particular,
 $\bar{\alpha }$
follows the following exogenous process:
$\bar{\alpha }$
follows the following exogenous process:
 \begin{equation} \dot{\bar{\alpha }} = \theta (\bar{\alpha }_1-\bar{\alpha }) \end{equation}
\begin{equation} \dot{\bar{\alpha }} = \theta (\bar{\alpha }_1-\bar{\alpha }) \end{equation}
with
 $\bar{\alpha } = \bar{\alpha }_0$
initially and
$\bar{\alpha } = \bar{\alpha }_0$
initially and
 $\theta =0.1$
. This implies that the impact of automation lasts for about three to four decades—a typical duration for a general purpose technology.Footnote
32
$\theta =0.1$
. This implies that the impact of automation lasts for about three to four decades—a typical duration for a general purpose technology.Footnote
32
6.2. Initial policy and steady state under majority voting
Before analyzing the episode of automation, we first ask how the steady state tax rates from our majority voting model differ from the corresponding rates in US data, and how these rates affect the initial steady state. As discussed above, capital and labor tax rates in the USA have recently averaged 31.9% and 23.1% respectively. By contrast, given our other parameters, the steady state tax rates under majority voting will be 45.4% and 9.7% respectively. That is, capital tax rates will be significantly higher, and labor taxes significantly lower.
The steady states under the two sets of tax rates are shown in Table 1. Unsurprisingly, given the higher capital tax rate, steady state capital is lower, which likewise reduces steady state output. The higher capital taxes fund a larger net transfer to workers, equal to 14.6% of GDP, compared with 8.8% using historical tax rates.Footnote 33 Thus, workers consume a larger share of output, so that although total output is about 6.3% lower, worker consumption is only 0.2% lower. Conversely, entrepreneur consumption is significantly lower, in both absolute and relative terms. The wage is lower due to the lower capital stock, but the after-tax wage is higher, and so labor supply is higher.Footnote 34
6.3. Quantitative analysis of an episode of automation
We now consider the effect of the episode of automation. We assume the economy begins in the steady state under majority voting with
 $\bar{\alpha } = \bar{\alpha }_o$
. At time
$\bar{\alpha } = \bar{\alpha }_o$
. At time
 $t=0$
, the economy is hit by a one-time automation shock, which steadily increases
$t=0$
, the economy is hit by a one-time automation shock, which steadily increases
 $\bar{\alpha }$
from
$\bar{\alpha }$
from
 $\bar{\alpha }_{o}$
to
$\bar{\alpha }_{o}$
to
 $\bar{\alpha }_{1}$
as described in section 6.1. In order to isolate the effect of automation (from the confounding effects of transitioning to optimal policy), we consider the impact of automation under optimal government policy. Thus, the economy is assumed to be in the optimal initial steady state when hit by the shock, and then transitions under optimal policy to the new steady state.
$\bar{\alpha }_{1}$
as described in section 6.1. In order to isolate the effect of automation (from the confounding effects of transitioning to optimal policy), we consider the impact of automation under optimal government policy. Thus, the economy is assumed to be in the optimal initial steady state when hit by the shock, and then transitions under optimal policy to the new steady state.
6.3.1. Steady states
We begin by considering the long-run effects of the automation episode. Table 2 shows key steady state values before and after the episode. The automation episode causes the labor share to decline by 10 percentage points as calibrated. This decrease in the labor share is consistent with the results we derived in section 5. So is the increase in the wage, which rises by 68.9 percent. Output increases to 2.06 times its original value, as stated earlier, driven by a large increase in capital. The consumption of workers increases by 74.9%, less than the 106% increase in output. By contrast, the consumption of entrepreneurs increases by 137%, reflecting the increase in the capital share. Finally, it is important to note here once again that the optimal tax rates in the long run do not depend on technology and, therefore, remain unchanged across steady states, when
 $G/Y$
is held constant. However, the optimal transfer as a share of GDP increases, since the optimal steady state transfer is a fixed share of capital, and the capital-output ratio increases as a result of the episode of automation.
$G/Y$
is held constant. However, the optimal transfer as a share of GDP increases, since the optimal steady state transfer is a fixed share of capital, and the capital-output ratio increases as a result of the episode of automation.
Steady states before and after an episode of automation under optimal policy:
 $\sigma =0.8$
$\sigma =0.8$

Dynamics for gradual increase with
 $\sigma =.8$
under optimal policy.
$\sigma =.8$
under optimal policy.

6.3.2. Transitional dynamics
The transitional dynamics of the episode of automation are shown in Figure 1 over a period of 75 years.Footnote
35
The transition is smooth and monotonic for output and capital, and therefore also for entrepreneur consumption (since
 $C_e=\rho K$
). The labor share declines monotonically as
$C_e=\rho K$
). The labor share declines monotonically as
 $\bar{\alpha }$
and
$\bar{\alpha }$
and
 $K$
increase. However, the other variables vary non-monotonically over the transition. The wage and worker consumption drop slightly on impact, before rising smoothly thereafter. The capital tax rate drops quickly on impact, then gradually rises to its steady state level, mirroring the rise in output and capital. Labor supply rises in the short run before declining in the long run, while net transfers to workers decline in the short run before rising in the long run.Footnote
36
$K$
increase. However, the other variables vary non-monotonically over the transition. The wage and worker consumption drop slightly on impact, before rising smoothly thereafter. The capital tax rate drops quickly on impact, then gradually rises to its steady state level, mirroring the rise in output and capital. Labor supply rises in the short run before declining in the long run, while net transfers to workers decline in the short run before rising in the long run.Footnote
36
The dynamics of the optimal capital tax derive from two channels. The first channel is that, since entrepreneur consumption ultimately grows more than worker consumption, it likewise grows at a faster rate, that is
 $g_{C_e}\gt g_{C_w}$
. Since workers have log utility, their intertemporal marginal rate of substitution (excluding time discounting) equals their growth rate in consumption, just like entrepreneurs. Then since
$g_{C_e}\gt g_{C_w}$
. Since workers have log utility, their intertemporal marginal rate of substitution (excluding time discounting) equals their growth rate in consumption, just like entrepreneurs. Then since
 $g_{C_e}\gt g_{C_w}$
, it follows that entrepreneurs have a greater desire to smooth consumption over the transition than do workers,Footnote
37
and therefore (per Corollary2) workers prefer lower capital taxes to stimulate investment and hasten the accumulation of capital. The second channel is that, as technological change precedes and proceeds faster than the accumulation of capital, the marginal product of capital is above its steady state level over the course of the transition (
$g_{C_e}\gt g_{C_w}$
, it follows that entrepreneurs have a greater desire to smooth consumption over the transition than do workers,Footnote
37
and therefore (per Corollary2) workers prefer lower capital taxes to stimulate investment and hasten the accumulation of capital. The second channel is that, as technological change precedes and proceeds faster than the accumulation of capital, the marginal product of capital is above its steady state level over the course of the transition (
 $F_K\gt r^\ast$
), which also makes it optimal to lower the capital tax rate (see equation (36)). That is, since the efficient level of capital has increased, capital is now below its efficient level, and therefore, as discussed in section 4.3, the indirect pecuniary motive for capital accumulation strengthens.
$F_K\gt r^\ast$
), which also makes it optimal to lower the capital tax rate (see equation (36)). That is, since the efficient level of capital has increased, capital is now below its efficient level, and therefore, as discussed in section 4.3, the indirect pecuniary motive for capital accumulation strengthens.
While these lower taxes are optimal from the perspective of workers, they come at the cost of lower consumption in the short run as net transfers decline. Then, as the tax rate and the capital share rise, transfers increase and ultimately end up higher due to the higher long-run capital share. The labor supply increases in the short run due to the income effect from the lower transfer before steadily declining as the transfer rises.Footnote 38 Worker consumption declines slightly on impact due to the lower transfer (which the higher labor supply is insufficient to offset). However, it quickly rises as the transition gets underway. The equilibrium wage likewise falls slightly on impact due to the higher labor supply, before rising as the gains to worker productivity from automation come into effect.
Taking into account transitional dynamics, we can examine welfare gains of workers and entrepreneurs from the episode of automation. Starting from the point at which the episode of automation begins, worker welfare increases by a consumption equivalent of 26.18%. For entrepreneurs, the analogous increase is 65.81%.Footnote 39 Note that, despite policy being controlled by workers and set solely to maximize their welfare, the increase in entrepreneur welfare is significantly greater than worker welfare, given the increase in the capital income share, and the greater increase in entrepreneur’s consumption.
6.3.3. Fixed tax counterfactual
The previous analysis considered the impact of an episode of automation under optimal policy set by majority voting. However, a true assessment of the impact of these policies requires comparison to an appropriate counterfactual benchmark. Accordingly, we consider a counterfactual in which tax rates remain fixed over the course of the transition. To isolate the effects of the optimal dynamic adjustment of taxes from changes in their levels, we assume that tax rates are fixed at their optimal steady state levels under majority voting throughout.Footnote 40 Thus the initial and final steady states are the same as shown in Table 2, and all that changes are the transition paths.
Dynamics for gradual increase with
 $\sigma =.8$
with fixed taxes.
$\sigma =.8$
with fixed taxes.

The transition paths under the fixed tax counterfactual are shown in Figure 2, which depicts the same variables as Figure 1, except that the time path of automation (
 $\bar{\alpha }$
) is shown in place of the capital tax rate (which is now fixed).
$\bar{\alpha }$
) is shown in place of the capital tax rate (which is now fixed).
In terms of the dynamics, two things stand out. First, the transition itself is much slower, as can be seen by directly comparing Figures 1 and 2. This is reflected in the time scales of the figures, which is 100 years in the fixed tax case, where previously we only showed 75. This follows directly from the fixed capital tax rate. As discussed above, under optimal policy the tax rate is lowered over the transition to boost investment and accelerate the accumulation of capital. In the fixed tax case, this does not take place, and thus it takes significantly longer for capital and output to reach their new higher steady state levels.
Secondly, there is significant overshooting of three variables: the labor share, labor supply, and transfers to workers as a share of GDP. These dynamics all relate to the labor share, so we focus on that. The labor share satisfies:
 \begin{equation} s_{L}=\left [1+\left (\bar{\alpha }/\left (1-\bar{\alpha }\right )\right )^{1/\sigma }\left (aK/L\right )^{1-1/\sigma }\right ]^{-1}. \end{equation}
\begin{equation} s_{L}=\left [1+\left (\bar{\alpha }/\left (1-\bar{\alpha }\right )\right )^{1/\sigma }\left (aK/L\right )^{1-1/\sigma }\right ]^{-1}. \end{equation}
Thus the labor share is decreasing in the share of tasks done by capital
 $\bar{\alpha }$
, but increasing in
$\bar{\alpha }$
, but increasing in
 $K/L$
(since
$K/L$
(since
 $\sigma \lt 1$
).Footnote
41
To explain the overshooting, we return to our observation above that, in the absence of lower capital taxes during the transition, capital takes significantly longer to reach its steady state value. By contrast, the exogenous variable
$\sigma \lt 1$
).Footnote
41
To explain the overshooting, we return to our observation above that, in the absence of lower capital taxes during the transition, capital takes significantly longer to reach its steady state value. By contrast, the exogenous variable
 $\bar{\alpha }$
is unaffected, and therefore converges to its steady state value significantly faster than
$\bar{\alpha }$
is unaffected, and therefore converges to its steady state value significantly faster than
 $K$
(as can be seen by comparing the first and third panels of Figure 2). Early in the transition the value of
$K$
(as can be seen by comparing the first and third panels of Figure 2). Early in the transition the value of
 $\bar{\alpha }$
is rises rapidly, and the labor share declines. As
$\bar{\alpha }$
is rises rapidly, and the labor share declines. As
 $\bar{\alpha }$
nears its steady state value,
$\bar{\alpha }$
nears its steady state value,
 $K$
(and therefore
$K$
(and therefore
 $K/L$
) remain well below its steady state value, and thus the labor share falls below its steady state value, that is, overshoots. In the last phase,
$K/L$
) remain well below its steady state value, and thus the labor share falls below its steady state value, that is, overshoots. In the last phase,
 $K/L$
increases further, causing the labor share to rise. The dynamics of labor supply and the transfer to workers as a share of GDP exhibit the same dynamics, because their values are closely tied to the labor share.Footnote
42
$K/L$
increases further, causing the labor share to rise. The dynamics of labor supply and the transfer to workers as a share of GDP exhibit the same dynamics, because their values are closely tied to the labor share.Footnote
42
The slower pace of the transition under fixed capital taxes turns out to have very important implications for welfare between the two scenarios. Recall that, under optimal policy, the welfare gain for workers was 26.18 percent (in consumption-equivalent terms), versus 65.81 percent for entrepreneurs. By contrast, in the fixed tax counterfactual the workers’ welfare gain is 25.50 percent, whereas the entrepreneurs’ gain is 44.21 percent (again, both in terms of consumption equivalents). Two things are notable here. First, optimally varying capital taxes over the transition substantially increases the welfare gains of entrepreneurs from the episode of automation. Indeed, this comparison allows a decomposition of the welfare effect—67% of the welfare gain to entrepreneurs under optimal taxes is due to the technological change, and 33% is due to optimal policy. Second, in contrast to entrepreneurs, workers benefit very little from optimal policy—optimally varying tax rates over the transition increases workers’ welfare by only 0.68 percentage points, whereas entrepreneurs’ gain by a whopping 21.60 percentage points, more than an order of magnitude higher! This difference is particularly striking given that policy was set to maximize worker welfare, placing zero weight on entrepreneurs.
What explains this result? While it is better from the workers’ perspective to cut capital taxes over the transition in order to accelerate the accumulation of capital, this produces only a small, second-order gain in welfare. The reason is that the resulting benefit to workers in terms of a faster wage increase is offset by the steep cut in transfers that is required to implement the initial capital tax reduction. Workers are trading off higher consumption in the long run against lower consumption in the short run. By contrast, the lower capital taxes in the short run results in higher consumption for entrepreneurs in the short run, and the faster accumulation of capital results in higher entrepreneur consumption in the long run. Thus entrepreneurs do not experience a tradeoff—they simply enjoy higher consumption in both the short run and the long run, and therefore experience a much larger, first-order gain in welfare. Moreover, as the preceding explanation indicates, the logic of the underlying mechanism does not rely on the value of
 $\sigma$
and whether it is above or below 1. This is attested to by the results for
$\sigma$
and whether it is above or below 1. This is attested to by the results for
 $\sigma =1.2$
in Appendix B.
$\sigma =1.2$
in Appendix B.
7. Robot taxes
The taxes considered so far have been on overall capital and labor income. Given that our concern is with automation in particular, a natural question is whether the workers may wish to tax some kinds of capital at different rates than others. For example, they may wish to tax those kinds that are competing most directly with them at a higher rate, what one might call a “robot tax.”
Suppose we decompose tasks into two types, 1 and 2. That is, we define subsets
 $U_1,U_2 \subset [0,1]$
such that
$U_1,U_2 \subset [0,1]$
such that
 $U_1 \cup U_2 = [0,1]$
and
$U_1 \cup U_2 = [0,1]$
and
 $U_1 \cap U_2 = \varnothing$
. We further assume that both sets are integrable, so that, for example,
$U_1 \cap U_2 = \varnothing$
. We further assume that both sets are integrable, so that, for example,
 $\int _{U_1} k(i)$
is well defined. Then we can define aggregate production as a function of aggregate labor
$\int _{U_1} k(i)$
is well defined. Then we can define aggregate production as a function of aggregate labor
 $L$
and aggregate capital assigned to the two types
$L$
and aggregate capital assigned to the two types
 $(K_1,K_2)$
as:
$(K_1,K_2)$
as:
 \begin{align} F\left (K_{1},K_{2},L\right )&=\max _{\left \{ k\left (i\right ),\ell \left (i\right )\right \} }\left \{ \left [\int _{0}^{1}\left (a\left (i\right )k\left (i\right )+b\left (i\right )\ell \left (i\right )\right )^{1-\frac{1}{\sigma }}di\right ]^{\frac{\sigma }{\sigma -1}}\right \}\\ \text{s.t.}&\quad \int _{i}\ell \left (i\right )\leq L,\text{ }\int _{U_{1}}k\left (i\right )\leq K_{1},\text{ }\int _{U_{2}}k\left (i\right )\leq K_{2}, \nonumber \\ &\quad k\left (i\right )\geq 0, \text{ } \ell \left (i\right )\geq 0. \nonumber \end{align}
\begin{align} F\left (K_{1},K_{2},L\right )&=\max _{\left \{ k\left (i\right ),\ell \left (i\right )\right \} }\left \{ \left [\int _{0}^{1}\left (a\left (i\right )k\left (i\right )+b\left (i\right )\ell \left (i\right )\right )^{1-\frac{1}{\sigma }}di\right ]^{\frac{\sigma }{\sigma -1}}\right \}\\ \text{s.t.}&\quad \int _{i}\ell \left (i\right )\leq L,\text{ }\int _{U_{1}}k\left (i\right )\leq K_{1},\text{ }\int _{U_{2}}k\left (i\right )\leq K_{2}, \nonumber \\ &\quad k\left (i\right )\geq 0, \text{ } \ell \left (i\right )\geq 0. \nonumber \end{align}
Now suppose the tax rates on capital income may differ between the two types of capital. Call these rates
 $\tau _1^k$
and
$\tau _1^k$
and
 $\tau _2^k$
. Since capital remains fully mobile across tasks, the after-tax return on capital must be the same for both kinds of capital, and therefore, when
$\tau _2^k$
. Since capital remains fully mobile across tasks, the after-tax return on capital must be the same for both kinds of capital, and therefore, when
 $K_1,K_2\gt 0$
, it must be the case that:
$K_1,K_2\gt 0$
, it must be the case that:
 \begin{equation} \left(1-\tau _1^k\right)r_1 = (1-\tau _2^k) r_2 \end{equation}
\begin{equation} \left(1-\tau _1^k\right)r_1 = (1-\tau _2^k) r_2 \end{equation}
with an inequality possible only when the non-negativity constraint binds for the kind of capital with lower after-tax return. Optimal capital demand from firms then implies
 $r_1=F_{K_1}$
and
$r_1=F_{K_1}$
and
 $r_2=F_{K_2}$
, so that by adjusting the tax rates between the two kinds of tasks, the planner effectively chooses
$r_2=F_{K_2}$
, so that by adjusting the tax rates between the two kinds of tasks, the planner effectively chooses
 $\{K_1,K_2\}$
. Then we can state the planner’s problem, and its solution, as follows:
$\{K_1,K_2\}$
. Then we can state the planner’s problem, and its solution, as follows:
Proposition 5.
Under majority voting with access to differential capital tax rates across the two subsets of tasks
 $U_1,U_2$
, the Ramsey Planner chooses the path of
$U_1,U_2$
, the Ramsey Planner chooses the path of
 $\{C_w,K,K_1,K_2,L\}$
to maximize worker welfare
$\{C_w,K,K_1,K_2,L\}$
to maximize worker welfare
 \begin{equation} \int _0^\infty e^{-\gamma t}U\left (C_{w},L\right )dt \end{equation}
\begin{equation} \int _0^\infty e^{-\gamma t}U\left (C_{w},L\right )dt \end{equation}
subject to constraint
 \begin{equation} \dot{K} = (1-\omega ) F\left (K_{1},K_{2},L\right )-\delta K-\rho K - C_w \end{equation}
\begin{equation} \dot{K} = (1-\omega ) F\left (K_{1},K_{2},L\right )-\delta K-\rho K - C_w \end{equation}
plus constraints
 $L,K_1,K_2 \geq 0$
and
$L,K_1,K_2 \geq 0$
and
 $K_1 + K_2 \leq K$
. The solution to this problem is identical to the solution with a single capital tax given in Proposition
2
, and is implemented by the tax rates given in Corollary
2
, with
$K_1 + K_2 \leq K$
. The solution to this problem is identical to the solution with a single capital tax given in Proposition
2
, and is implemented by the tax rates given in Corollary
2
, with
 $\tau _1^k = \tau _2^k = \tau ^k$
.
$\tau _1^k = \tau _2^k = \tau ^k$
.
Proof. See Appendix A.6.
Note that, since the partition of tasks between
 $K_1$
and
$K_1$
and
 $K_2$
was arbitrary, the result of Proposition5 extends to any partition of tasks. Thus workers will always choose to tax different kinds of capital at the same rate, and there will be no robot taxes. Intuitively, workers want production to take place as efficiently as possible, since they are the residual beneficiaries of increased efficiency through the transfer. This is because entrepreneurs consumption is a fixed share of aggregate capital
$K_2$
was arbitrary, the result of Proposition5 extends to any partition of tasks. Thus workers will always choose to tax different kinds of capital at the same rate, and there will be no robot taxes. Intuitively, workers want production to take place as efficiently as possible, since they are the residual beneficiaries of increased efficiency through the transfer. This is because entrepreneurs consumption is a fixed share of aggregate capital
 $C_e=\rho K$
, and so any gains from more efficient deployment of existing capital goes entirely to workers.
$C_e=\rho K$
, and so any gains from more efficient deployment of existing capital goes entirely to workers.
This intuition also sheds light on the necessary conditions for this result to hold. Recall that we have assumed that labor is mobile across tasks, workers are identical (so that distributional concerns across workers are absent), and there is a mechanism to transfer additional production to workers (the transfer). If these features were not present, the result might not hold.Footnote 43 Further, note that we have assumed a single rate of depreciation across tasks. If instead we allowed rates of depreciation to differ across tasks, the optimal tax rate would likewise differ across tasks, unless depreciation were tax deductible.Footnote 44
8. Conclusion
Recent trends in automation have re-ignited the debate about the distributional implications of technical progress and possible policy responses. Our analysis in this paper speaks directly to these issues. We find that when the economy is not (yet) fully automated, the effects of automation on wages and the labor share of income are worse than that of traditional technical progress. Moreover, if workers have political power, they will choose to tax capital to transfer resources to themselves from the entrepreneurs. Nevertheless, we find that workers will choose to temporarily lower capital taxes during an episode of automation to hasten the accumulation of capital and boost their wages and transfers. The welfare gains from such a policy are much larger for entrepreneurs than for workers, since changes in capital taxes have first-order welfare effects on entrepreneurs, but only second-order welfare effects on workers. This may explain why capital tax rates remain low across advanced economies despite recent concerns about growing inequality and automation, and why recent discussion of “universal basic income” has focused on broadening the scope of transfers rather than raising capital taxes per se. Future research may examine how the government’s tax and transfer policy may depend on alternative assumptions about the constraints and mechanisms to set such policies. It may also explore the effects of worker heterogeneity on this analysis, since not all workers are equally affected by particular episodes of automation.
Acknowledgements
We thank participants in the FSU Macro workshop and the INET Columbia Task Force Meeting, especially Joseph Stiglitz and Anton Korinek. All errors remaining are ours.
Supplementary material
To view supplementary material for this article, please visit https://doi.org/10.1017/S1365100524000361













































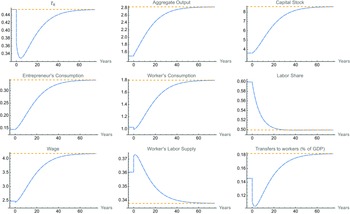

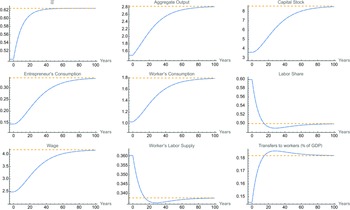




 Open access
Open access