



No CrossRef data available.
Published online by Cambridge University Press: 17 January 2024
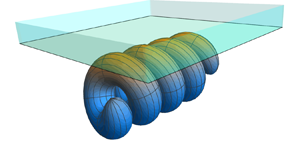
Filaments are ubiquitous within the microscopic world, occurring in biological and industrial environments and displaying a varied dynamics. Their wide range of applications has spurred the development of a branch of asymptotics focused on the behaviour of filaments, called slender-body theory (SBT). Slender-body theories are computationally efficient and focus on the mechanics of an isolated fibre that is slender and not too curved. However, SBTs that work beyond these limits are needed to explore complex systems. Recently, we developed tubular-body theory (TBT), an approach like SBT that allows the hydrodynamic traction on any isolated fibre in a viscous fluid to be determined exactly. This paper extends TBT to model fibres near plane interfaces by performing a similar expansion on the single-layer boundary integrals (BIs) for bodies by a plane interface. This provides a well-behaved SBT inspired approach for fibres by interfaces with a similar versatility to the BIs but without the singular kernels. The derivation of the new theory, called tubular-body theory for interfaces (TBTi), also establishes a criterion for the convergence of the TBTi series representation. The TBTi equations are solved numerically using a approach similar to boundary element methods (BEMs), called TBTi-BEM, to investigate the properties of TBTi empirically. The TBTi-BEM is found to compare favourably with an existing BEM and the lubrication singularity on a sphere, suggesting TBTi is valid for all separations. Finally, we simulate the hydrodynamics of helices beneath a free interface and a plane wall to demonstrate the applicability of the technique.