









1. Introduction
Galaxies are routinely classified by visual inspection of their appearance. Astronomers have devised and improved classification schemes since the 1900’s. Amongst the first and most popular classification schemes is that devised by (Hubble Reference Hubble1926, the so-called ‘tuning fork’) and subsequent expansions suggested by de Vaucouleurs (Reference de Vaucouleurs1959), Sandage & Tammann (Reference Sandage and Tammann1981) and others (see Sandage Reference Sandage2005 for a historical review).
Visual classifications are not just helpful in grouping galaxies into families, but a broad body of literature has shown that these visual characteristics of galaxies encode important information about internal and external physical processes. This is evidenced by the fact that visual morphology has been linked to many other properties: colour (e.g. Taylor et al. Reference Taylor2015; Correa et al. Reference Correa2017), star formation rate (Sandage Reference Sandage1986; Kennicutt Reference Kennicutt1998; Wuyts et al. Reference Wuyts2011), galaxy interactions (Lotz et al. Reference Lotz2008; Kannan et al. Reference Kannan2015), environment (Dressler 1980; Goto et al. Reference Goto2003, i.e. the morphology–density relation) and secular processes such as internal perturbations, torques from bars, spiral scattering, etc (e.g. Buta Reference Buta, Falcón-Barroso and Knapen2013; Sellwood Reference Sellwood2014).
The overall structural makeup of the galaxy population has been shown to have evolved both visually (e.g. Abraham & van den Bergh Reference Abraham and van den Bergh2001; Conselice Reference Conselice2014) and dynamically (e.g. Wisnioski et al. Reference Wisnioski2015; Bezanson et al. Reference Bezanson2018; D’Eugenio et al. Reference D’Eugenio2023b). This points to the importance of careful morphological and dynamical classifications of galaxies in studies comparing samples at different redshifts.
As such, the literature on visual classifications is broad and historically rich. Studies pertaining to visual classification of galaxies range from historical surveys of nearby galaxies (e.g. Nilson et al. 1973; Sandage & Tammann Reference Sandage and Tammann1981; Vaucouleurs Reference Vaucouleurs1991) to modern large imaging surveys such as e.g. the Sloan Digital Sky Survey (SDSS, Abazajian et al. Reference Abazajian2009) and the Dark Energy Survey (Cheng et al. Reference Cheng2021b).
As samples of galaxies to visually classify have grown in proportions, the required individual efforts for obtaining reliable visual classification have become intractable. Astronomers are now turning to citizen science projects (e.g. Willett et al. Reference Willett2017; Vázquez-Mata et al. Reference Vázquez-Mata2022; Porter-Temple et al. Reference Porter-Temple2022) and routinely use automated classification techniques (e.g. Huertas-Company et al. Reference Huertas-Company, Aguerri, Bernardi, Mei and Sánchez Almeida2011; Huertas-Company et al. Reference Huertas-Company2015; Sanchez et al. Reference Sanchez2019; Martin et al. Reference Martin, Kaviraj, Hocking, Read and Geach2020; Cavanagh, Bekki, & Groves Reference Cavanagh, Bekki and Groves2021; Cheng et al. Reference Cheng2021a; Walmsley et al. Reference Walmsley2022; Omori et al. Reference Omori2023; Desmons, Brough, & Lanusse Reference Desmons, Brough and Lanusse2024) to handle the deluge of data.
Morphological classification of galaxies at higher redshift is complicated by a number of confounding factors including the unavailability of similar rest-frame band filters, shallower relative depth and typically lower spatial resolution (see e.g. Ren et al. Reference Ren2024; Salvador et al. Reference Salvador2024). Visual classifications may thus need adapting for higher redshift samples (e.g. Masters et al. Reference Masters2011; Kartaltepe et al. Reference Kartaltepe2023; Tohill et al. Reference Tohill2023; Conselice et al. Reference Conselice2024). Indeed, faint features such as tidal features Bílek et al. (2020), Desmons et al. (Reference Desmons2023), as well as comparatively small features such as central bars or spiral arms (e.g. Masters et al. Reference Masters2021) may be more difficult to identify at high redshift depending on image quality and depth. High redshift galaxies (beyond
 $z\sim2$
) may be morphologically and structurally different from their local counterparts, often not having bulges and discs (e.g. Sweet et al. Reference Sweet2020).
$z\sim2$
) may be morphologically and structurally different from their local counterparts, often not having bulges and discs (e.g. Sweet et al. Reference Sweet2020).
As with morphology, visual classification of the dynamics of galaxies through careful inspection of kinematic maps may help identify internal sub-structure, signatures of past interactions or secular processes and environmental effects. As such, modern spatially resolved spectroscopic surveys have relied on visual classification of galaxy kinematic maps to identify dynamical families of galaxies. This approach was pioneered by the SAURON and ATLAS
 $^{\text{3D}}$
surveys (e.g. Emsellem et al. Reference Emsellem2007; Emsellem et al. Reference Emsellem2011; Cappellari et al. Reference Cappellari2011; Krajnović et al. 2011) and expanded to e.g. the MASSIVE Survey (e.g. Veale et al. Reference Veale2017), the Sydney Australian astronomical observatory Multi-object Integral-field spectrograph Galaxy Survey (SAMI, e.g., Cortese et al. Reference Cortese2016; van de Sande et al. Reference van de Sande2017a; Foster et al. Reference Foster2018; van de Sande et al. Reference van de Sande2018), the Mapping Nearby Galaxies at Apache Point Observatory (MaNGA, e.g. Greene et al. Reference Greene2017; Masters et al. Reference Masters2021; Vázquez-Mata et al. Reference Vázquez-Mata2022) and simulations (e.g. Naab et al. Reference Naab2014; Lagos et al. Reference Lagos2022). As with morphology, computational and statistical tools have also been employed to efficiently sort galaxy kinematics into objective classes (e.g. Kalinova et al. Reference Kalinova2017; van de Sande et al. Reference van de Sande2021a; Sweet et al. Reference Sweet2020).
$^{\text{3D}}$
surveys (e.g. Emsellem et al. Reference Emsellem2007; Emsellem et al. Reference Emsellem2011; Cappellari et al. Reference Cappellari2011; Krajnović et al. 2011) and expanded to e.g. the MASSIVE Survey (e.g. Veale et al. Reference Veale2017), the Sydney Australian astronomical observatory Multi-object Integral-field spectrograph Galaxy Survey (SAMI, e.g., Cortese et al. Reference Cortese2016; van de Sande et al. Reference van de Sande2017a; Foster et al. Reference Foster2018; van de Sande et al. Reference van de Sande2018), the Mapping Nearby Galaxies at Apache Point Observatory (MaNGA, e.g. Greene et al. Reference Greene2017; Masters et al. Reference Masters2021; Vázquez-Mata et al. Reference Vázquez-Mata2022) and simulations (e.g. Naab et al. Reference Naab2014; Lagos et al. Reference Lagos2022). As with morphology, computational and statistical tools have also been employed to efficiently sort galaxy kinematics into objective classes (e.g. Kalinova et al. Reference Kalinova2017; van de Sande et al. Reference van de Sande2021a; Sweet et al. Reference Sweet2020).
One may expect that certain kinematic features, especially faint ones or those on small spatial scales, may be difficult to identify in shallower or lower spatial resolution higher redshift data. Such features might include central
 $2\sigma$
(i.e. double maxima in the velocity dispersion map) or central kinematically decoupled cores (KDCs). Statistical samples of galaxies with sufficient spatial resolution spectroscopic data at intermediate redshifts are only just becoming available to make comparisons of kinematic visual classifications possible (e.g. Guérou et al. Reference Guérou2017; Foster et al. Reference Foster2021; Muñoz López et al. Reference Muñoz López2024).
$2\sigma$
(i.e. double maxima in the velocity dispersion map) or central kinematically decoupled cores (KDCs). Statistical samples of galaxies with sufficient spatial resolution spectroscopic data at intermediate redshifts are only just becoming available to make comparisons of kinematic visual classifications possible (e.g. Guérou et al. Reference Guérou2017; Foster et al. Reference Foster2021; Muñoz López et al. Reference Muñoz López2024).
The Middle-Ages Galaxies Properties with Integral field spectroscopy (MAGPI) SurveyFootnote
1
is a medium-deep Very Large Telescope (VLT) Multi-Unit Spectroscopic Explorer (MUSE) survey of 60 massive (
 $\gt 7 \times 10^{10}\,\text{M}_\odot$
) central galaxies at redshifts
$\gt 7 \times 10^{10}\,\text{M}_\odot$
) central galaxies at redshifts
 $0.25 \lt z \lt 0.35$
(primaries) and their immediate environment. The MAGPI sample was selected from the Galaxy and Mass Assembly (GAMA) survey (Driver et al. Reference Driver2011) to span a broad range of environments halo masses (i.e.
$0.25 \lt z \lt 0.35$
(primaries) and their immediate environment. The MAGPI sample was selected from the Galaxy and Mass Assembly (GAMA) survey (Driver et al. Reference Driver2011) to span a broad range of environments halo masses (i.e.
 $11.35 \le \log ( M_\mathrm{halo}/M_\odot) \le 15.35$
). This is achieved through dedicated observations of
$11.35 \le \log ( M_\mathrm{halo}/M_\odot) \le 15.35$
). This is achieved through dedicated observations of
 $56 \times 1$
arcmin
$56 \times 1$
arcmin
 $^2$
fields and supplemented with 4 massive centrals from archival observations of Abell 370 (Program ID 096.A-0710; PI: Bauer) and Abell 2744 (Program IDs: 095.A-0181 and 096.A-0496; PI: Richard).Footnote
2
At the time that the visual classifications used herein were performed, only 35 of the 56 MAGPI fields had been completely observed and reduced. The remaining fields will be processed in due course.
$^2$
fields and supplemented with 4 massive centrals from archival observations of Abell 370 (Program ID 096.A-0710; PI: Bauer) and Abell 2744 (Program IDs: 095.A-0181 and 096.A-0496; PI: Richard).Footnote
2
At the time that the visual classifications used herein were performed, only 35 of the 56 MAGPI fields had been completely observed and reduced. The remaining fields will be processed in due course.
The MAGPI survey is thus intermediate to data used in past visual classification studies. It is a relatively small survey (<1 000 individual galaxies to classify), making careful visual inspection by a set of expert team members possible. However, MAGPI images and kinematic maps have respectively lower than and comparable spatial resolution to other
 $z\sim0$
comparable surveys such as MaNGA and SAMI. We thus expect that morphological classifications in MAGPI will be intermediate in detail and accuracy, lying between high redshift and local surveys, while kinematic classification will be of similar quality and accuracy to MaNGA and SAMI, but with the advantage of not being restricted to a fixed field-of-view/size.
$z\sim0$
comparable surveys such as MaNGA and SAMI. We thus expect that morphological classifications in MAGPI will be intermediate in detail and accuracy, lying between high redshift and local surveys, while kinematic classification will be of similar quality and accuracy to MaNGA and SAMI, but with the advantage of not being restricted to a fixed field-of-view/size.
In this work, we present morphological and dynamical visual classifications for all spatially resolved targets in 35 MAGPI fields. We endeavour to identify and quantify the dynamical state of MAGPI galaxies and compare our visual dynamical classification with published results from local surveys. In Section 2, we present the MAGPI data used in this work. Section 4 presents our statistical analysis of the collected visual classifications. Our results are outlined in Section 5 and discussed in Section 6. We present our conclusions in Section 7.
We assume a
 $\Lambda$
CDM universe with
$\Lambda$
CDM universe with
 $H_0$
= 70 kms
$H_0$
= 70 kms
 $^{-1}$
Mpc
$^{-1}$
Mpc
 $^{-1}$
,
$^{-1}$
,
 $\Omega_\mathrm{M}$
= 0.3 and
$\Omega_\mathrm{M}$
= 0.3 and
 $\Omega_\Lambda$
= 0.7.
$\Omega_\Lambda$
= 0.7.
2. Data
2.1 Data reduction
The data used herein are taken from the MAGPI Survey. Survey strategy, sample description and science goals are described in Foster et al. (Reference Foster2021) along with a description of the initial data reduction. Detailed data reduction, curation and quality control will be discussed in Mendel et al. (in preparation).
Briefly, raw MUSE data cubes are reduced using the ESO MUSE pipeline (Weilbacher et al. Reference Weilbacher2012; Weilbacher et al. Reference Weilbacher2020) via the pymusepipe Footnote 3 interface. Basic data reduction steps performed include bias and overscan subtraction, flat-fielding, wavelength calibration, telluric correction and cube reconstruction. Sky subtraction is further improved using the Zurich Atmosphere Purge (ZAP, Soto et al. Reference Soto, Lilly, Bacon, Richard and Conseil2016) package.
Individual objects within the MAGPI cubes are detected on the white light image from the MUSE data cube using the ProFound r package (Robotham et al. Reference Robotham2018). ProFound is used to define the edges (i.e. segmentation maps) for every source.
Reduced MUSE data cubes are then cut into ‘minicubes’ following the individual segmentation maps for every object using mpdaf.Footnote 4 mpdaf is further used to produce synthetic Sloan Digital Sky Survey (SDSS) filter images in g, r and i. We note that because of the nominal MUSE wavelength and the notch filter that obscures the Na laser, the wavelength ranges of the g and r-bands are only partially covered. These MAGPI synthetic images are used to produce RGB colour images for classification. The default image scaling from magicaxis/magimageRGB Footnote 5 is used for visual classification and throughout this work.
2.2 Galaxy property estimates
2.2.1 Redshifts
For each detected object within the MAGPI field-of-view, a 1 arcsec aperture spectrum is created for each object. The finalised redshift is measured on this aperture spectrum using MARZ (Hinton et al. Reference Hinton, Davis, Lidman, Glazebrook and Lewis2016) with visual inspection. We use a modified template set provided by M. Fossati.Footnote 6 This set includes templates with higher spectral resolution and out to higher redshifts, as well as a variety of source types representative of the range found in MAGPI.
2.2.2 Structural parameters
Basic structural parameters (e.g. effective radius
 $R_e$
, photometric position angle
$R_e$
, photometric position angle
 $PA_\mathrm{phot}$
, Sérsic indices n, etc) in all three synthetic bands g, r and i are obtained using both ProFound and GalFit (Peng et al. Reference Peng, Ho, Impey and Rix2002; Peng et al. Reference Peng, Ho, Impey and Rix2010). Except for the initial selection described in Section 3, GalFit measurements are used. ProFound further provides integrated magnitudes in g, r and i.
$PA_\mathrm{phot}$
, Sérsic indices n, etc) in all three synthetic bands g, r and i are obtained using both ProFound and GalFit (Peng et al. Reference Peng, Ho, Impey and Rix2002; Peng et al. Reference Peng, Ho, Impey and Rix2010). Except for the initial selection described in Section 3, GalFit measurements are used. ProFound further provides integrated magnitudes in g, r and i.
2.2.3 Stellar masses
Stellar masses are derived in a method consistent to that used for the GAMA survey (Bellstedt et al. Reference Bellstedt2020; Driver et al. Reference Driver2022) using the ProSpect SED-fitting code (Robotham et al. Reference Robotham2020). We use images that are pixel-matched to the MAGPI minicubes from the Kilo-Degree Survey (KiDS, de Jong et al. Reference de Jong2017) and VISTA Kilo-degree Infrared Galaxy (VIKING, Edge et al. Reference Edge2013) in 9 bands (u-
 $K_s$
) to apply forced photometry based on the MAGPI segmentation maps. We assume a skewed-normal star formation history with a linearly evolving metallicity, a Chabrier (Reference Chabrier2003) initial mass function (IMF) and use the Bruzual & Charlot (Reference Bruzual and Charlot2003) stellar population templates.
$K_s$
) to apply forced photometry based on the MAGPI segmentation maps. We assume a skewed-normal star formation history with a linearly evolving metallicity, a Chabrier (Reference Chabrier2003) initial mass function (IMF) and use the Bruzual & Charlot (Reference Bruzual and Charlot2003) stellar population templates.
2.3 Kinematic maps and parameters
Stellar and ionised gas kinematic velocity (v) and dispersion (
 $\sigma$
) maps are obtained independently using the penalised pixel fitting python package (pPXF, Cappellari & Emsellem Reference Cappellari and Emsellem2004; Cappellari Reference Cappellari2017) via the Galaxy Integral field unit Spectroscopy Tool GIST
Footnote
7
(Bittner et al. Reference Bittner2019; Fraser-McKelvie et al. in preparation) as described in e.g., Foster et al. (Reference Foster2021), Bagge et al. (Reference Bagge2023), D’Eugenio et al. (Reference D’Eugenio2023a), Battisti et al. (in preparation).
$\sigma$
) maps are obtained independently using the penalised pixel fitting python package (pPXF, Cappellari & Emsellem Reference Cappellari and Emsellem2004; Cappellari Reference Cappellari2017) via the Galaxy Integral field unit Spectroscopy Tool GIST
Footnote
7
(Bittner et al. Reference Bittner2019; Fraser-McKelvie et al. in preparation) as described in e.g., Foster et al. (Reference Foster2021), Bagge et al. (Reference Bagge2023), D’Eugenio et al. (Reference D’Eugenio2023a), Battisti et al. (in preparation).
Briefly, stellar kinematics are obtained by fitting the stellar continuum from individual spaxels with a signal-to-noise ratio above 3 per pixel after masking spectral regions of possible nebular emission and strong skylines using a series of stellar templates from the IndoUS stellar template library (Sánchez-Blázquez et al. Reference Sánchez-Blázquez2006). Our method is similar to that used for the SAMI Galaxy Survey (van de Sande et al. Reference van de Sande2017b; Croom et al. Reference Croom2021). Specifically, pPXF is first fit to elliptical annular bins to determine an optimal subset of templates before individual spaxels are fit with subsets from their respective and adjacent radial bins (see Foster et al. Reference Foster2021 and D’Eugenio et al. Reference D’Eugenio2023a for further detail). Only spaxels with valid values (i.e. excluding NaN or Inf) are presented for visual classification purposes. Stellar velocity and dispersion maps presented to classifiers were scaled between the 5th and 95th percentiles, but users are able to interactively modify those bounds and zoom in or out. This default scaling is used for plotting purposes throughout. Only classifications associated with stellar kinematic maps with a minimum of 15 valid spaxels are considered (231 galaxies).
Similarly, ionised gas kinematics are obtained through fitting and subtracting the stellar continuum using gist and pPXF with light-weighted stellar templates ssp_mist_c3k_salpeter (Charlie Conroy, private communication) before using a customised version of pyGandALF (Sarzi et al. Reference Sarzi2006; Falcón-Barroso et al. Reference Falcón-Barroso2006) for emission line modelling. For visual classification purposes, we presents/plot only spaxels where the brightest emission line has a signal-to-noise ratio
 $\gt 3$
. Ionised gas kinematic maps have been used and described by the MAGPI team in e.g. Foster et al. (Reference Foster2021), Bagge et al. (Reference Bagge2023) and Chen et al. (Reference Chen2024), and full detail of their production will be provided in Battisti et al. (in preparation). As for the stellar kinematics, gas velocity and dispersion maps presented to classifiers were scaled between the 5th and 95th percentiles by default (also used for plotting purposes throughout this paper), with users able to interactive change those bounds and zoom in or out. Only classifications associated with ionised gas kinematic maps with a minimum of 15 valid spaxels are considered (402 galaxies).
$\gt 3$
. Ionised gas kinematic maps have been used and described by the MAGPI team in e.g. Foster et al. (Reference Foster2021), Bagge et al. (Reference Bagge2023) and Chen et al. (Reference Chen2024), and full detail of their production will be provided in Battisti et al. (in preparation). As for the stellar kinematics, gas velocity and dispersion maps presented to classifiers were scaled between the 5th and 95th percentiles by default (also used for plotting purposes throughout this paper), with users able to interactive change those bounds and zoom in or out. Only classifications associated with ionised gas kinematic maps with a minimum of 15 valid spaxels are considered (402 galaxies).
For MAGPI data, we use the corrected spin parameter proxy values determined by Derkenne et al. (Reference Derkenne2024). Briefly, the spin proxy parameter
 $\lambda_{r}$
is computed based on the stellar kinematic maps following the definition of Emsellem et al. (Reference Emsellem2007):
$\lambda_{r}$
is computed based on the stellar kinematic maps following the definition of Emsellem et al. (Reference Emsellem2007):
 \begin{equation}\lambda_r=\frac{\sum^{N}_{i=1} F_i R_i|{v_i}|}{\sum^{N}_{i=1}F_i R_i \sqrt{v_i^2+\sigma_i^2}},\end{equation}
\begin{equation}\lambda_r=\frac{\sum^{N}_{i=1} F_i R_i|{v_i}|}{\sum^{N}_{i=1}F_i R_i \sqrt{v_i^2+\sigma_i^2}},\end{equation}
where
 $F_i$
,
$F_i$
,
 $R_i$
,
$R_i$
,
 $v_i$
, and
$v_i$
, and
 $\sigma_i$
are the flux, galactocentric radius, recession velocity corrected for the systemic velocity and the velocity dispersion measured in the
$\sigma_i$
are the flux, galactocentric radius, recession velocity corrected for the systemic velocity and the velocity dispersion measured in the
 $i\text{th}$
spaxel within an aperture of size r, respectively. For our purposes, this quantity is measured within the
$i\text{th}$
spaxel within an aperture of size r, respectively. For our purposes, this quantity is measured within the
 $r=R_e$
elliptical aperture closely following the methodology of (Fraser-McKelvie & Cortese Reference Fraser-McKelvie and Cortese2022). Seeing and aperture corrections are applied following Harborne et al. (Reference Harborne, Power and Robotham2020). More detail on the calculation of the corrected
$r=R_e$
elliptical aperture closely following the methodology of (Fraser-McKelvie & Cortese Reference Fraser-McKelvie and Cortese2022). Seeing and aperture corrections are applied following Harborne et al. (Reference Harborne, Power and Robotham2020). More detail on the calculation of the corrected
 $\lambda_{R_e}$
values used herein can be found in Derkenne et al. (Reference Derkenne2024).
$\lambda_{R_e}$
values used herein can be found in Derkenne et al. (Reference Derkenne2024).
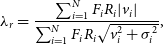
From left to right: Redshift (z), stellar mass (
 $M_\star/M_\odot$
), group mass proxy (
$M_\star/M_\odot$
), group mass proxy (
 $M_\mathrm{ group}/M_\odot$
), effective radius (
$M_\mathrm{ group}/M_\odot$
), effective radius (
 $R_e$
) and Sérsic index (n) distributions for the visually classified (aquamarine filled histogram) and bright (
$R_e$
) and Sérsic index (n) distributions for the visually classified (aquamarine filled histogram) and bright (
 $r\lt20$
and
$r\lt20$
and
 $0.2\le z \le 0.4$
, green lined histogram) MAGPI samples. Distributions for the compared SAMI sample discussed in Section 6 are shown as orange lined histograms. The bright MAGPI sample is offset to higher stellar masses and effective radii than the SAMI galaxies. The ranges of Sérsic indices and group masses probed are similar between the MAGPI bright and SAMI samples, suggesting a comparable mix of morphologies and environments.
$0.2\le z \le 0.4$
, green lined histogram) MAGPI samples. Distributions for the compared SAMI sample discussed in Section 6 are shown as orange lined histograms. The bright MAGPI sample is offset to higher stellar masses and effective radii than the SAMI galaxies. The ranges of Sérsic indices and group masses probed are similar between the MAGPI bright and SAMI samples, suggesting a comparable mix of morphologies and environments.
2.4 Environment metrics
Environmental metrics for MAGPI are calculated using parliament
Footnote
8
(Harborne et al. in preparation) following the methodology of Knobel et al. (Reference Knobel2009) and Robotham et al. (Reference Robotham2011). Based on galaxy groups identified with parliament, we make use of the total number of group members (
 $N_\mathrm{group}$
), the group mass proxy (assuming a multiplicative factor of
$N_\mathrm{group}$
), the group mass proxy (assuming a multiplicative factor of
 $A=10$
, see Robotham et al. Reference Robotham2011) and the computed distance to the first nearest neighbour (
$A=10$
, see Robotham et al. Reference Robotham2011) and the computed distance to the first nearest neighbour (
 $d_1$
) as described in Bagge et al. (Reference Bagge2023).
$d_1$
) as described in Bagge et al. (Reference Bagge2023).
3. Sample selection for classification
MAGPI team members were invited to visually inspect and classify galaxies from the MAGPI Master Catalogue (Mendel et al. in prep) that satisfy the following criteria:
-
1.
 $R_\mathrm{e, ProFound} \gt 0.75 \times$
FWHM
$_r$
(i.e. source is extended in the r-band according to ProFound),
$R_\mathrm{e, ProFound} \gt 0.75 \times$
FWHM
$_r$
(i.e. source is extended in the r-band according to ProFound), -
2.
$R_\mathrm{e, GalFit} \gt 0.75 \times$
FWHM
$_r$
(i.e. source is extended in the r-band according to GalFit), and -
3.
$i \lt 26$
mag (AB).





This selection is deliberate, yielding 637 galaxies that are potentially resolved across a redshift range of
 $0.08 \le z \le 5$
to visually classify (from 3 970 MAGPI detections). We consider both
$0.08 \le z \le 5$
to visually classify (from 3 970 MAGPI detections). We consider both
 $R_\mathrm{e, ProFound}$
and
$R_\mathrm{e, ProFound}$
and
 $R_\mathrm{e, GalFit}$
sizes for selection purposes to ensure that the majority of unresolved targets are removed. Only GalFit values are used elsewhere in this work. Despite the above criteria and due to ProFound and GalFit sometimes failing in similar ways for targets near the edge of the MAGPI Fields where background noise dominates, a significant fraction of the faintest 637 objects are seemingly unresolved. These are small round objects with associated ProFound and GalFit sizes extending beyond their visible extent on the image.
$R_\mathrm{e, GalFit}$
sizes for selection purposes to ensure that the majority of unresolved targets are removed. Only GalFit values are used elsewhere in this work. Despite the above criteria and due to ProFound and GalFit sometimes failing in similar ways for targets near the edge of the MAGPI Fields where background noise dominates, a significant fraction of the faintest 637 objects are seemingly unresolved. These are small round objects with associated ProFound and GalFit sizes extending beyond their visible extent on the image.
We further compile and discuss a ‘bright sample’ of 86 intermediate redshift galaxies (
 $0.2\le z \le0.4$
) with
$0.2\le z \le0.4$
) with
 $r\lt20$
mag. Classifications for galaxies fainter than this threshold appreciably increase in difficulty and decrease in reliability (refer to Section 4, Appendix B). Stellar mass, effective radius and Sérsic index histograms for the visually classified and bright MAGPI samples are shown in Fig. 1.
$r\lt20$
mag. Classifications for galaxies fainter than this threshold appreciably increase in difficulty and decrease in reliability (refer to Section 4, Appendix B). Stellar mass, effective radius and Sérsic index histograms for the visually classified and bright MAGPI samples are shown in Fig. 1.
3.1 Collection of independent opinions
We use a bespoke online application to collect individual and independent classifications. Each classifier receives their own randomised list of galaxies to classify. As a result, although there were 15 classifiers, each galaxy was independently assessed by 11–13 individuals.
The r code for the visual classification web application is publicly available on GitHub.Footnote 9 The MAGPI visual classification web application was deployed on Data Central’s shiny Footnote 10 server.
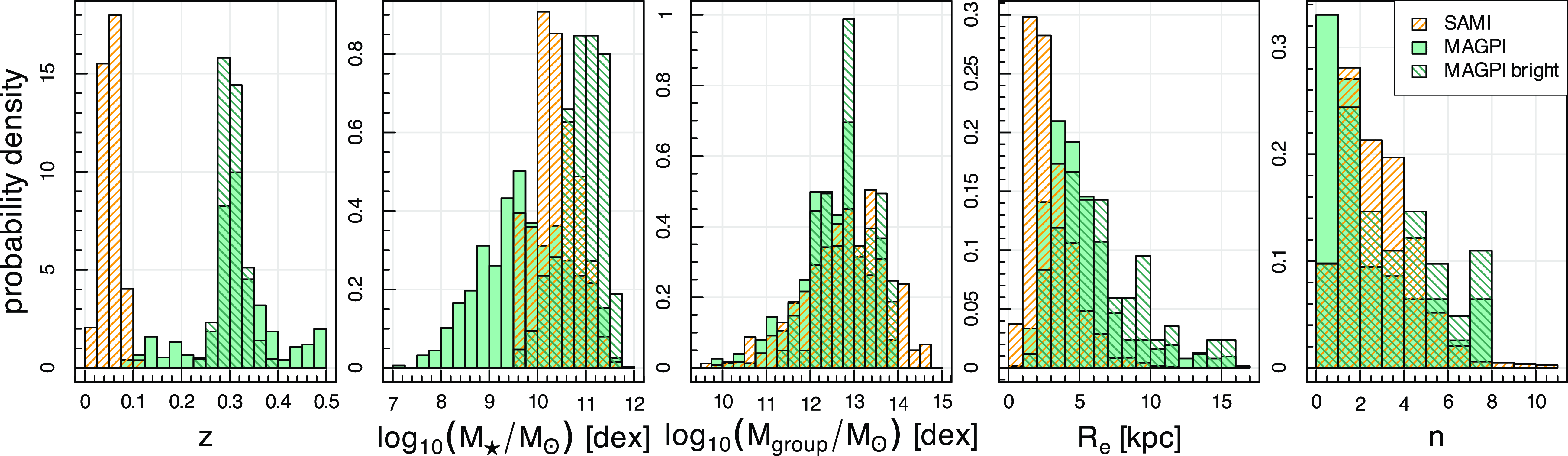
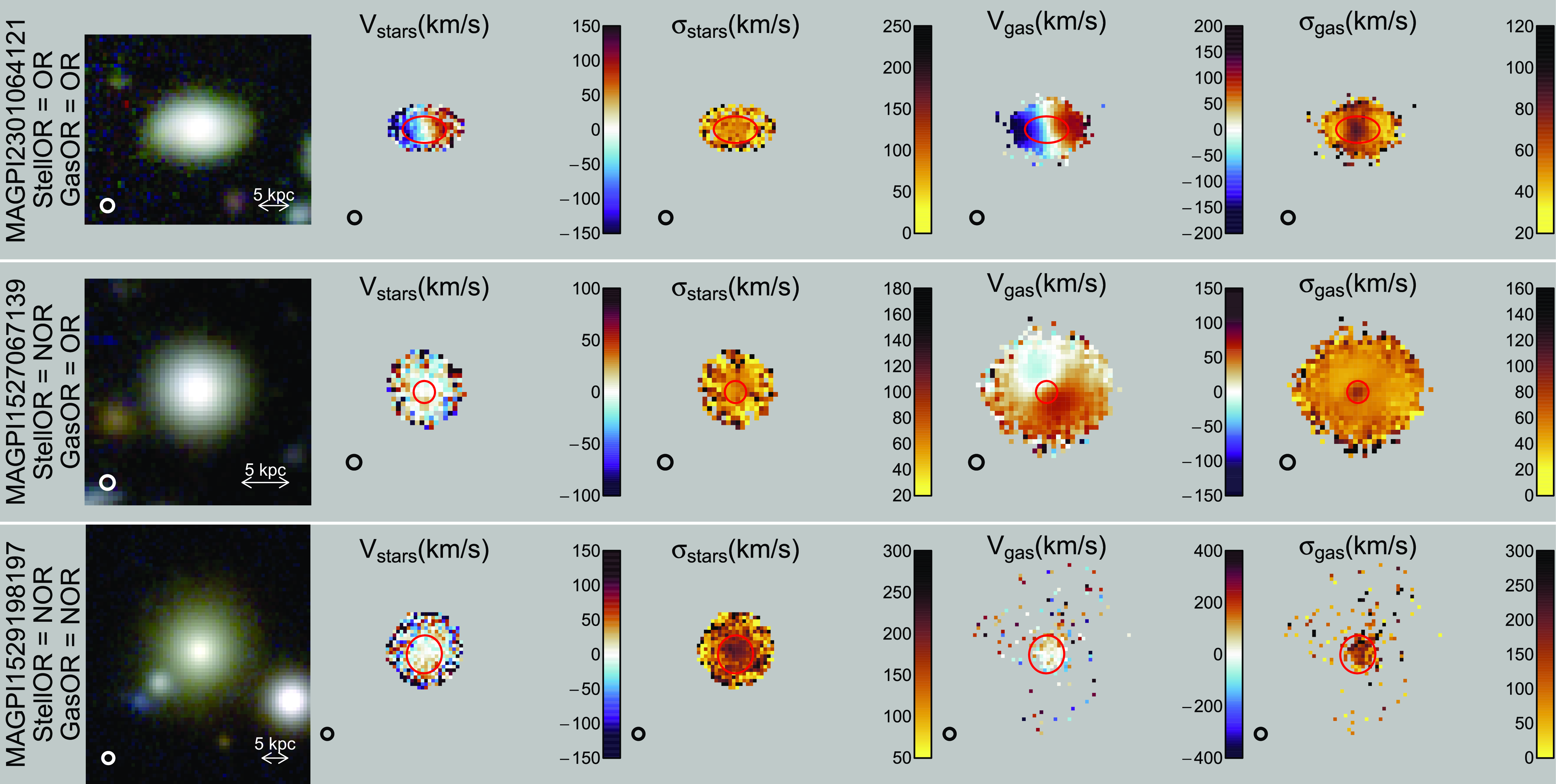
Briefly, volunteers from the MAGPI team (henceforth ‘classifiers’) were asked to give their opinion based on the MAGPI synthetic colour image, stellar and gas kinematic (velocity and dispersion) maps. Example images and kinematic maps presented to classifiers are shown in Fig. 2. Relevant information regarding the questions and options provided to classifiers are summarised in Table 1. These questions reflect the classifications used in SAMI (van de Sande et al. Reference van de Sande2021a).
Example MAGPI galaxies in each of the rotational classes. From top to bottom as labelled on the left: MAGPI2301064121 with obvious stellar and gas rotation (i.e. Stars OR, Gas OR); MAGPI1527067139 with non-obvious stellar and obvious gas rotation (i.e. Stars NOR, Gas OR); and MAGPI1529198197 with non-obvious stellar and gas rotation (i.e. Stars NOR, Gas NOR). There is no galaxy with reliable Stars OR and Gas NOR. From left to right: synthetic g, r, i-band colour image of the galaxy based on the MUSE data; stellar velocity map; stellar dispersion map; gas velocity map; and gas dispersion map. The PSF is shown as a white or black circle in the bottom-left corner of each panel. All panels within a row are on the same scale, and an arrow representing the physical scale (in kpc) is shown on the left-most panel for each galaxy. Red ellipses represent
 $1R_e$
.
$1R_e$
.
Visual classifications were performed on the team data for the 35 science-ready MAGPI fields. A compilation of the raw output from individual visual classifications is presented in Fig. 3, showing the range of opinions across the sample. The distribution of responses varied substantially between classifiers, with some exhibiting more confidence in assigning a category than others, who conversely prefer either not to select a category (NS) or explicitly state they do not know (IDK). Section 4 describes how these categories are treated within our Bayesian inference. Given that all classifiers are astronomers (graduate astronomy students and beyond), we assume that all approaches are equally valid and that this diversity of opinions reflects the inherent subjectivity of visual classifications. Therefore, in what follows, we assume that there is no individual whose opinion holds the ‘ground truth’ and that the decision of the majority should be preferred over that of individuals. Indeed, we find only very weak and incoherent trends (not shown here for privacy reasons) between the year of a classifier’s first publication (as a proxy for reverse expertise) and their willingness to assign a visual classification.
Summary of questions (Column 1) and possible user input (Column 4) included in the r-Shiny web application
 $^{\text{a}}$
. Parameter and corresponding numerical values are given in Columns 2 and 3, respectively. Column 5 lists relevant instructions to classifiers provided within the application.
$^{\text{a}}$
. Parameter and corresponding numerical values are given in Columns 2 and 3, respectively. Column 5 lists relevant instructions to classifiers provided within the application.
Posterior mode (
 $\mu$
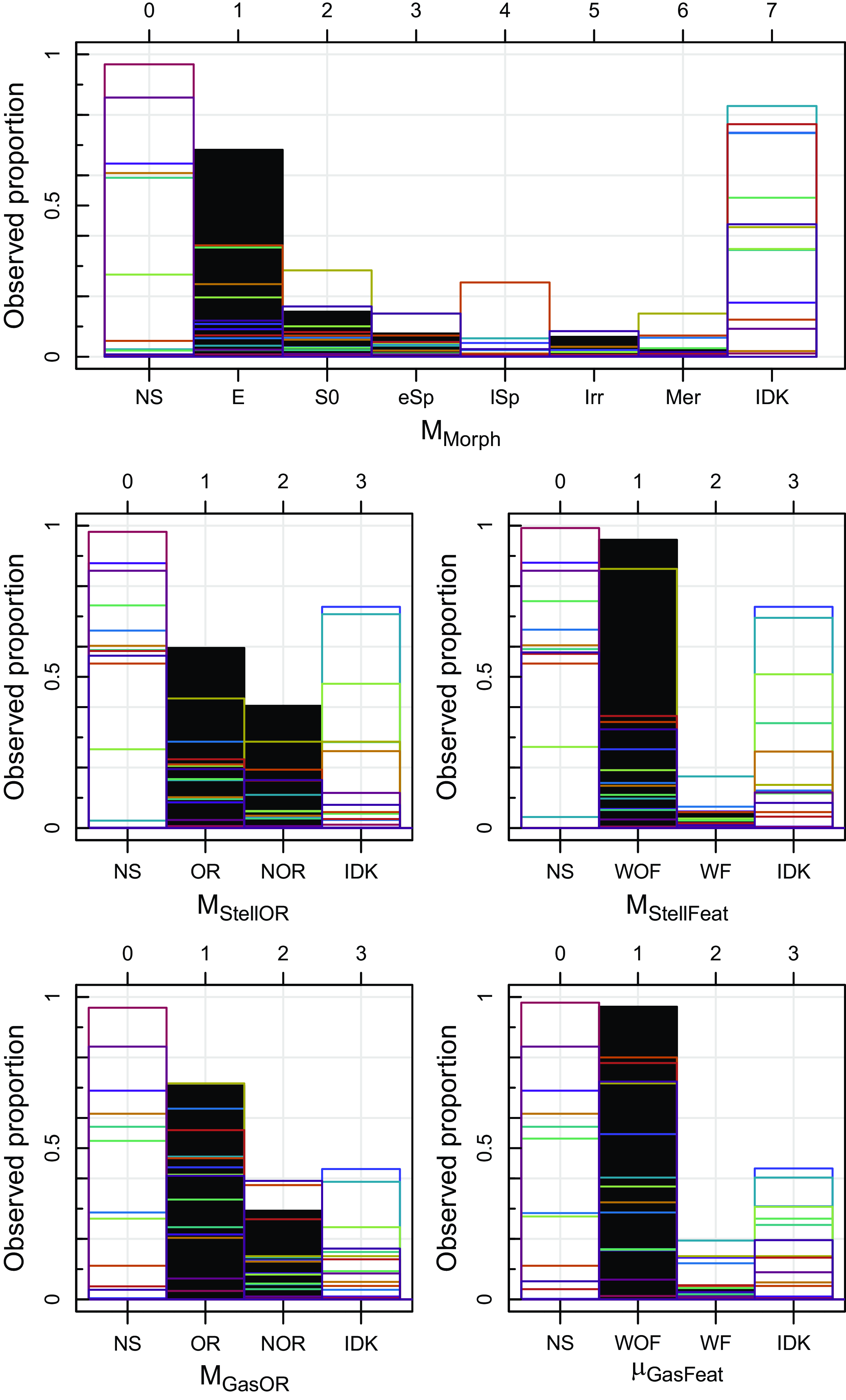
) observed proportions (black histograms) with superimposed raw observed proportions for individual classifiers shown as different coloured histograms prior to applying quality cuts. These histograms illustrate the range of responses received as input for our Bayesian modelling. Parameters are as per Table 1 for morphology (Morph, top row), stellar kinematic (StellOR and StellFeat, middle row) and gas kinematics (GasOR and GasFeat, bottom row). There are broad differences in the shape of the distributions from classifier to classifier. The individual distributions also illustrate how different classifiers favoured ‘IDK’ or ‘NS’ and the high proportion of each features that were difficult to classify.
$\mu$
) observed proportions (black histograms) with superimposed raw observed proportions for individual classifiers shown as different coloured histograms prior to applying quality cuts. These histograms illustrate the range of responses received as input for our Bayesian modelling. Parameters are as per Table 1 for morphology (Morph, top row), stellar kinematic (StellOR and StellFeat, middle row) and gas kinematics (GasOR and GasFeat, bottom row). There are broad differences in the shape of the distributions from classifier to classifier. The individual distributions also illustrate how different classifiers favoured ‘IDK’ or ‘NS’ and the high proportion of each features that were difficult to classify.
4. Analysis
For each galaxy, visual classifications for each collected parameter (i.e. Morph, StellOR, StellFeat, GasOR, and GasFeat) are aggregated as follows. First the modes (M) of the relevant distributions are computed after excluding NS (none selected). We exclude from subsequent analysis classifications based on stellar (399 galaxies) or gas (122 galaxies) kinematic maps where 3 or more classifiers raised the ‘there are issue(s)’ flags (i.e. StellKinFlag or GasKinFlag, respectively).
Statistical inferences on galaxy parameters are then derived using a modified Dawid–Skene model (Dawid & Skene Reference Dawid and Skene1979), extended to allow for NS and IDK responses. The standard Dawid–Skene model posits that, given a galaxy with true parameter z, the classification provided by classifier i is drawn from a categorical distribution with probability vector
 $\boldsymbol{\theta}_{iz}$
, which represent classifier-specific response tendencies for galaxies of that type. By considering the concordance and discordance between classifiers’ classifications of the same galaxies, and assuming that the classifiers are generally accurate (i.e. high probability of providing correct classifications), the classifier tendencies and true parameters that are most compatible with the observed pattern of classifications can be identified.
$\boldsymbol{\theta}_{iz}$
, which represent classifier-specific response tendencies for galaxies of that type. By considering the concordance and discordance between classifiers’ classifications of the same galaxies, and assuming that the classifiers are generally accurate (i.e. high probability of providing correct classifications), the classifier tendencies and true parameters that are most compatible with the observed pattern of classifications can be identified.
Our extended model – the full details of which are provided in Appendix A – introduces classifier-specific confidence parameters and galaxy-specific difficulty parameters, which influence the rate at which classifiers respond NS or IDK. Further, the model assumes that classifier accuracy (the probability of providing the correct classification) is lower for galaxies with higher difficulty.
Bayesian inference is performed by modifying the rater package (Pullin, Gurrin, & Vukcevic Reference Pullin, Gurrin and Vukcevic2023) to implement the extended model in RStan (version 2.32.6; Stan Development Team 2024), which uses a dynamic Hamiltonian Monte Carlo algorithm to estimate the posterior distribution. Weakly informative priors are used for all parameters. In particular, for classifier tendencies
 $\boldsymbol{\theta}$
related to a parameter with K possible values, we use a Dirichlet prior with concentration parameter
$\boldsymbol{\theta}$
related to a parameter with K possible values, we use a Dirichlet prior with concentration parameter
 $7(K-1)/6$
on the correct classification and
$7(K-1)/6$
on the correct classification and
 $1/2$
on each incorrect classification, such that the probability of a correct classification for each true parameter has an expected value of 70% but could range from 8% to 99.9% when
$1/2$
on each incorrect classification, such that the probability of a correct classification for each true parameter has an expected value of 70% but could range from 8% to 99.9% when
 $K = 2$
, or from 37% to 94% when
$K = 2$
, or from 37% to 94% when
 $K = 6$
, with 95% prior probability.
$K = 6$
, with 95% prior probability.
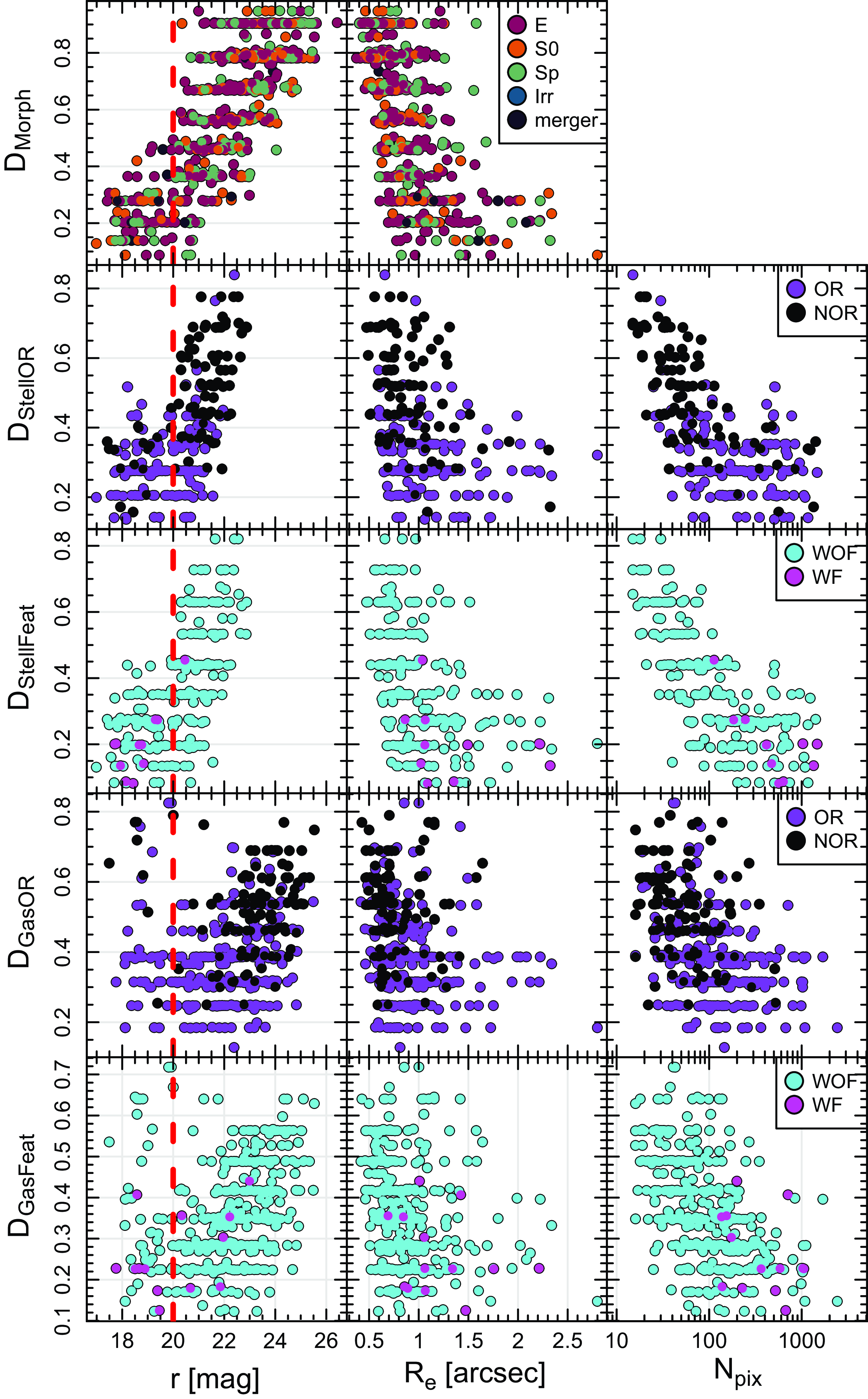
Dependence of the ‘difficulty’ parameter for morphology (
 $D_\mathrm{Morph}$
), stellar rotation (
$D_\mathrm{Morph}$
), stellar rotation (
 $D_\mathrm{StellOR}$
), stellar features (
$D_\mathrm{StellOR}$
), stellar features (
 $D_\mathrm{StellFeat}$
), ionised gas rotation (
$D_\mathrm{StellFeat}$
), ionised gas rotation (
 $D_\mathrm{GasOR}$
) and features (
$D_\mathrm{GasOR}$
) and features (
 $D_\mathrm{GasFeat}$
) with r-band magnitude (left), effective radius (middle), and the number of good pixels in the relevant map shown to classifiers (
$D_\mathrm{GasFeat}$
) with r-band magnitude (left), effective radius (middle), and the number of good pixels in the relevant map shown to classifiers (
 $N_\mathrm{pix}$
). Points are colour-coded according to the posterior mode of each galaxy as per the legend shown on the right-most panel of each row. Red dashed lines show the threshold for the ‘bright sample’ at
$N_\mathrm{pix}$
). Points are colour-coded according to the posterior mode of each galaxy as per the legend shown on the right-most panel of each row. Red dashed lines show the threshold for the ‘bright sample’ at
 $r=20$
mag. Because stellar kinematics require comparatively higher surface brightnesses than images and gas kinematics, stellar kinematic maps are not available to visually classify galaxies fainter than
$r=20$
mag. Because stellar kinematics require comparatively higher surface brightnesses than images and gas kinematics, stellar kinematic maps are not available to visually classify galaxies fainter than
 $r\sim23$
, explaining the shorter range of magnitudes covered by StellOR and StellFeat. In general, fainter and smaller galaxies are more difficult to classify. Galaxies with obvious rotation (StellOR and GasOR) and dynamical features (StellFeat and GasFeat) are easier to classify (i.e. lower mean/median D).
$r\sim23$
, explaining the shorter range of magnitudes covered by StellOR and StellFeat. In general, fainter and smaller galaxies are more difficult to classify. Galaxies with obvious rotation (StellOR and GasOR) and dynamical features (StellFeat and GasFeat) are easier to classify (i.e. lower mean/median D).
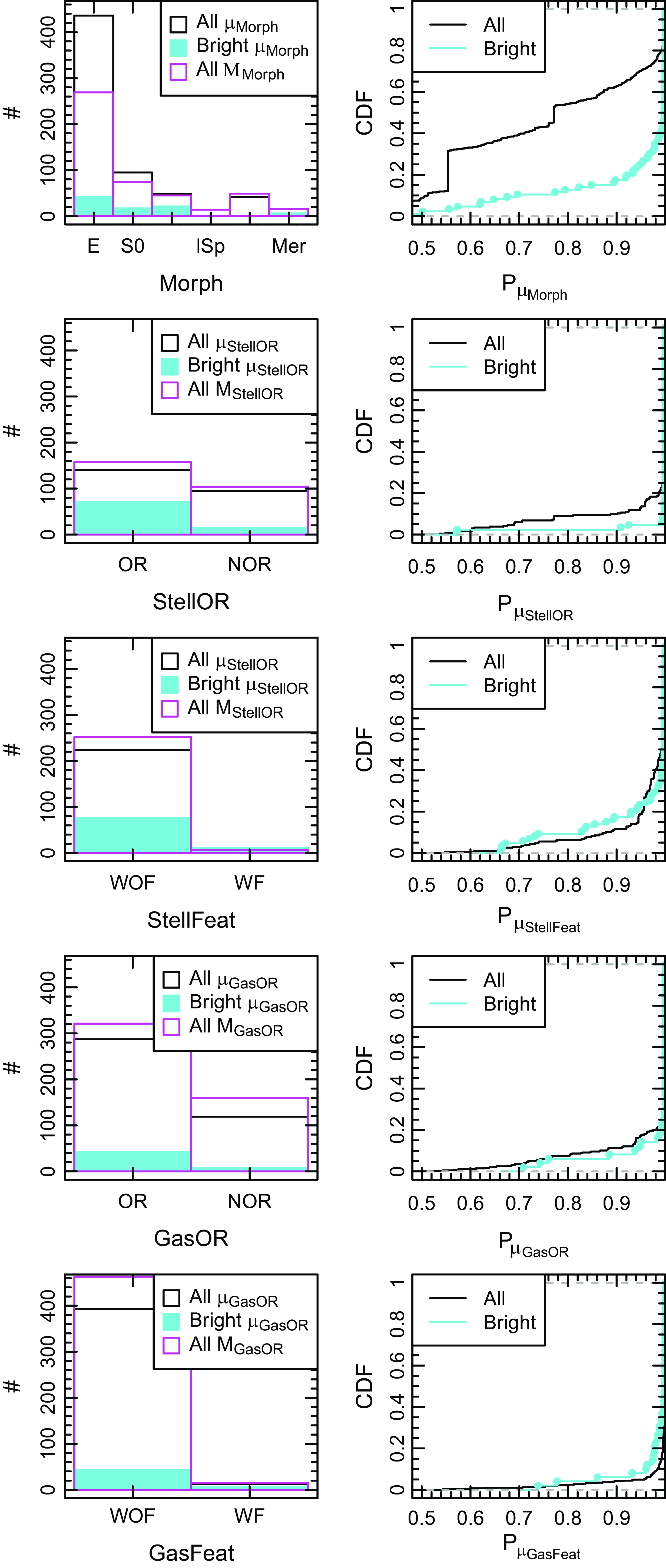
Comparison of the output distributions (left) for the Bayesian and simple consensus approaches for (from top to bottom) Morph, StellOR, StellFeat, GasOR and GasFeat. Raw (M, magenta) and posterior (
 $\mu$
) modes for the whole (black) and bright (
$\mu$
) modes for the whole (black) and bright (
 $r\lt20$
, cyan) samples as per the legend. Empirical cumulative distribution functions (CDF, right) for the posterior mode probability
$r\lt20$
, cyan) samples as per the legend. Empirical cumulative distribution functions (CDF, right) for the posterior mode probability
 $P_{\mu_\mathrm{Morph}}$
for the whole (black) and bright (cyan) samples as per the legend.
$P_{\mu_\mathrm{Morph}}$
for the whole (black) and bright (cyan) samples as per the legend.
For each galaxy and for each parameter, we obtain the vector of posterior probabilities
 $P_k$
that the underlying truth corresponds to each option k. The largest of these defines the posterior mode, denoted
$P_k$
that the underlying truth corresponds to each option k. The largest of these defines the posterior mode, denoted
 $\mu_\mathrm{Morph}$
,
$\mu_\mathrm{Morph}$
,
 $\mu_\mathrm{ StellOR}$
,
$\mu_\mathrm{ StellOR}$
,
 $\mu_\mathrm{StellFeat}$
,
$\mu_\mathrm{StellFeat}$
,
 $\mu_\mathrm{GasOR}$
and
$\mu_\mathrm{GasOR}$
and
 $\mu_\mathrm{GasFeat}$
, respectively. We also extract the posterior mean of the difficulty of classifying each parameter for each galaxy, denoted
$\mu_\mathrm{GasFeat}$
, respectively. We also extract the posterior mean of the difficulty of classifying each parameter for each galaxy, denoted
 $D_\mathrm{Morph}$
,
$D_\mathrm{Morph}$
,
 $D_\mathrm{StellOR}$
,
$D_\mathrm{StellOR}$
,
 $D_\mathrm{StellFeat}$
,
$D_\mathrm{StellFeat}$
,
 $D_\mathrm{GasOR}$
and
$D_\mathrm{GasOR}$
and
 $D_\mathrm{GasFeat}$
, and representing the expected probability of a IDK or NS response from the average classifier. There were no explicit instructions on how to treat IDK vs. NS classifications. Given that individual choices on how to treat those options differed across raters and that neither response provides additional information, we decided not to distinguish them in the model and instead interpret both answers as reflecting hesitation in rating a given property. Fig. 4 shows how the difficulty of classifying the different features of a galaxy strongly depends galaxy brightness, size and the number of available pixels (for the kinematic maps).
$D_\mathrm{GasFeat}$
, and representing the expected probability of a IDK or NS response from the average classifier. There were no explicit instructions on how to treat IDK vs. NS classifications. Given that individual choices on how to treat those options differed across raters and that neither response provides additional information, we decided not to distinguish them in the model and instead interpret both answers as reflecting hesitation in rating a given property. Fig. 4 shows how the difficulty of classifying the different features of a galaxy strongly depends galaxy brightness, size and the number of available pixels (for the kinematic maps).
Fig. 5 compares the distributions of the Bayesian posterior modes (
 $\mu$
) with that of the more commonly used simple mode (M) for each parameter. The cumulative distribution function of the posterior probabilities for the bright and whole samples are also shown. For most parameters, the bright sample of galaxies have a higher proportion of reliable (
$\mu$
) with that of the more commonly used simple mode (M) for each parameter. The cumulative distribution function of the posterior probabilities for the bright and whole samples are also shown. For most parameters, the bright sample of galaxies have a higher proportion of reliable (
 $P_\mu\gt0.98$
) classifications.
$P_\mu\gt0.98$
) classifications.
Examples of the most uncertain visual morphological and dynamical classifications (
 $P_\mu \lt 0.55$
) are shown in Appendix B. Uncertain morphologies are usually associated with galaxies of intermediate morphological types or merging systems, uncertain stellar dynamics are usually associated with complex kinematic maps, while uncertain ionised gas dynamical classifications are associated with sparsely sampled and/or noisy maps. For most science cases, we recommend such low
$P_\mu \lt 0.55$
) are shown in Appendix B. Uncertain morphologies are usually associated with galaxies of intermediate morphological types or merging systems, uncertain stellar dynamics are usually associated with complex kinematic maps, while uncertain ionised gas dynamical classifications are associated with sparsely sampled and/or noisy maps. For most science cases, we recommend such low
 $P_\mu$
classifications be removed.
$P_\mu$
classifications be removed.
Example galaxies spanning the range of StellOR, StellFeat, StellKinFlag, GasOR and GasFeat categories are shown in Fig. 2.
Finally, we compute the fraction of classifiers who have seen the relevant map and raised specific flags (i.e. BarFlag, VisFeatFlag, StellKinFlag and GasKinFlag):
 \begin{equation} f_\mathrm{BarFlag} = \frac{N_{\text{BarFlag = 1, Morph} \neq \text{NS}}}{N_\mathrm{Morph \neq NS}},\end{equation}
\begin{equation} f_\mathrm{BarFlag} = \frac{N_{\text{BarFlag = 1, Morph} \neq \text{NS}}}{N_\mathrm{Morph \neq NS}},\end{equation}
 \begin{equation} f_\mathrm{VisFeatFlag} = \frac{N_{\text{VisFeatFlag = 1, Morph} \neq \text{NS}}}{N_\mathrm{Morph \neq NS}},\end{equation}
\begin{equation} f_\mathrm{VisFeatFlag} = \frac{N_{\text{VisFeatFlag = 1, Morph} \neq \text{NS}}}{N_\mathrm{Morph \neq NS}},\end{equation}
 \begin{equation} f_\mathrm{StellKinFlag} = \frac{N_{\text{StellKinFlag = 1, StellOR} \neq \text{NS}}}{N_\mathrm{StellOR \neq NS}},\end{equation}
\begin{equation} f_\mathrm{StellKinFlag} = \frac{N_{\text{StellKinFlag = 1, StellOR} \neq \text{NS}}}{N_\mathrm{StellOR \neq NS}},\end{equation}
 \begin{equation} f_\mathrm{GasKinFlag} = \frac{N_{\text{GasKinFlag = 1, GasOR} \neq \text{NS}}}{N_\mathrm{GasOR \neq NS}}\end{equation}
\begin{equation} f_\mathrm{GasKinFlag} = \frac{N_{\text{GasKinFlag = 1, GasOR} \neq \text{NS}}}{N_\mathrm{GasOR \neq NS}}\end{equation}
These may be used to determine samples of galaxies where visual signs of a bar (
 $f_\mathrm{BarFlag} \ne0$
), visual features/issues on the galaxy image (
$f_\mathrm{BarFlag} \ne0$
), visual features/issues on the galaxy image (
 $f_\mathrm{VisFeatFlag} \ne0$
) or issues with the kinematic maps (
$f_\mathrm{VisFeatFlag} \ne0$
) or issues with the kinematic maps (
 $f_\mathrm{StellKinFlag} \ne0$
or
$f_\mathrm{StellKinFlag} \ne0$
or
 $f_\mathrm{GasKinFlag} \ne0$
) have been raised. Example barred galaxies (
$f_\mathrm{GasKinFlag} \ne0$
) have been raised. Example barred galaxies (
 $f_\mathrm{BarFlag} \ne0$
) are shown in Fig. 6.
$f_\mathrm{BarFlag} \ne0$
) are shown in Fig. 6.
Free-form comments are also collated, although those are not used in this work.
In what follows, we refer to and generally consider ‘reliable’ classifications as those with posterior mode probabilities
 $P_{\mu}\gt0.98$
, indicating we ascribe less than a 2% chance that the feature is wrongly classified.
$P_{\mu}\gt0.98$
, indicating we ascribe less than a 2% chance that the feature is wrongly classified.
5. Results
Basic descriptive statistics for galaxies in each category are summarised in Table 2. A brief summary of salient outcomes is given below.
The
 $z\sim0.3$
Hubble Tuning Fork using example MAGPI synthetic g, r, i-band colour images.
$z\sim0.3$
Hubble Tuning Fork using example MAGPI synthetic g, r, i-band colour images.
Number (N, Column 2) and fraction (f, Column 3) of galaxies with
 $r\lt20$
mag (bright sample) and relevant
$r\lt20$
mag (bright sample) and relevant
 $P_{\mu_\mathrm{Class}}\gt0.98$
in each morphological and kinematic category (Column 1). In each category, the proportion is calculated against the number of galaxies with comparable classification.
$P_{\mu_\mathrm{Class}}\gt0.98$
in each morphological and kinematic category (Column 1). In each category, the proportion is calculated against the number of galaxies with comparable classification.

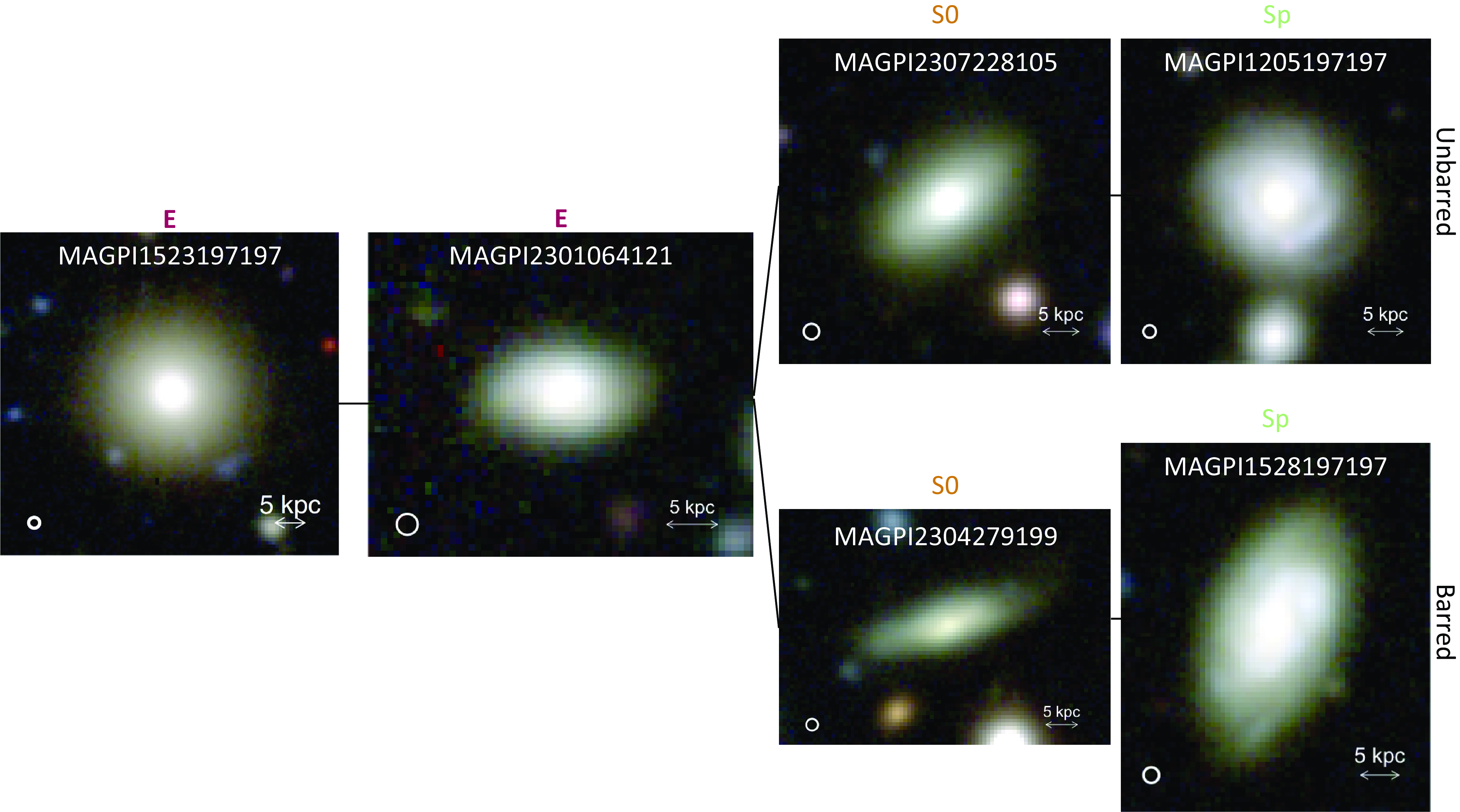
Gallery of MAGPI synthetic g, r, i-band colour images of a selection of bright (
 $r\lt20$
mag) MAGPI galaxies with reliable visual morphologies. From left to right: example elliptical (E), lenticulars (S0), Spirals (eSp or lSp) and mergers (Mer). The PSF is shown as a white circle and the physical scale (in kpc) is represented as a white arrow on in each panel for reference.
$r\lt20$
mag) MAGPI galaxies with reliable visual morphologies. From left to right: example elliptical (E), lenticulars (S0), Spirals (eSp or lSp) and mergers (Mer). The PSF is shown as a white circle and the physical scale (in kpc) is represented as a white arrow on in each panel for reference.
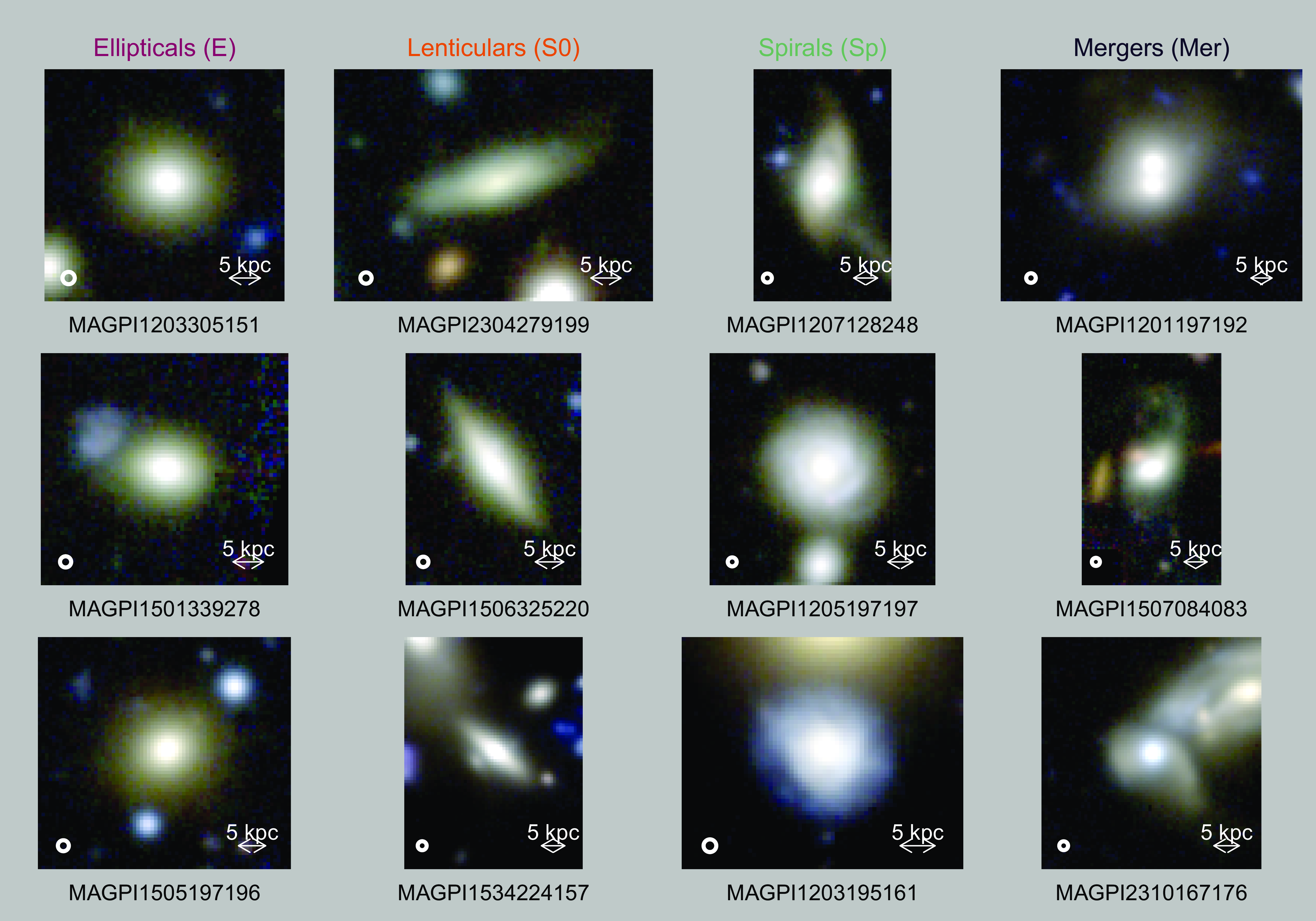
Fig. 7 shows example galaxies in each morphology category. Very few classifiers selected the Morph
 $=4$
(late spiral/lSp, see Fig. 3) overall, suggesting that late and early spirals are difficult to delineate in MAGPI-resolution images. We thus henceforth combine the lSp and eSp categories into a single Sp category. Our sample spans a broad range of morphologies (see Figs. 5, 6 and 7), confirming that the range of morphological classes is represented in MAGPI. Out of the 86 bright sample galaxies within our sample, 56 have reliable morphologies (i.e.
$=4$
(late spiral/lSp, see Fig. 3) overall, suggesting that late and early spirals are difficult to delineate in MAGPI-resolution images. We thus henceforth combine the lSp and eSp categories into a single Sp category. Our sample spans a broad range of morphologies (see Figs. 5, 6 and 7), confirming that the range of morphological classes is represented in MAGPI. Out of the 86 bright sample galaxies within our sample, 56 have reliable morphologies (i.e.
 $P_{\mu_\mathrm{Morph}}\gt0.98$
), of which 52, 11, 29 and 5% are classified as E, S0, Sp and Mergers, respectively. While 5 merging galaxies are identified, there is no irregular galaxy in our bright sample.
$P_{\mu_\mathrm{Morph}}\gt0.98$
), of which 52, 11, 29 and 5% are classified as E, S0, Sp and Mergers, respectively. While 5 merging galaxies are identified, there is no irregular galaxy in our bright sample.
Similarly, of the 82 (95% of the bright sample) galaxies with a reliably assigned stellar kinematic classification (
 $P_{\mu_\mathrm{StellOR}}\gt0.98$
), 85% show obvious rotation (see Table 2). For the gas kinematics, this fraction is 90%, with 87% of galaxies showing obvious rotation in both maps. In other words, most galaxies in our sample rotate and when both gas and stars are present, both tend to rotate. There is however one exception where the stars do not show obvious rotation while the gas does (MAGPI1527067139), which is shown in the second row of Fig. 2. There are only four galaxies (MAGPI1206110186, MAGPI1503197197, MAGPI1507084083 and MAGPI1529198197) for which there is no obvious rotation in either the stars or the gas (the latter is shown in Fig. 2).
$P_{\mu_\mathrm{StellOR}}\gt0.98$
), 85% show obvious rotation (see Table 2). For the gas kinematics, this fraction is 90%, with 87% of galaxies showing obvious rotation in both maps. In other words, most galaxies in our sample rotate and when both gas and stars are present, both tend to rotate. There is however one exception where the stars do not show obvious rotation while the gas does (MAGPI1527067139), which is shown in the second row of Fig. 2. There are only four galaxies (MAGPI1206110186, MAGPI1503197197, MAGPI1507084083 and MAGPI1529198197) for which there is no obvious rotation in either the stars or the gas (the latter is shown in Fig. 2).
Of the 61 (38) bright galaxies with reliable stellar (gas) kinematic feature classifications, 5 (4) galaxies have
 $\mu_\mathrm{ StellFeat}=$
WF (
$\mu_\mathrm{ StellFeat}=$
WF (
 $\mu_\mathrm{GasFeat}=$
WF) (see Table 2). Kinematic features are proportionally slightly more common in the ionised gas kinematic maps and coexist in only 2 galaxies (MAGPI2310167176 and MAGPI2310199196). Example galaxies with stellar and gas kinematic features are shown in Figs. 8 and 9, respectively. Most show evidence of ongoing interaction, suggesting complex dynamics in MAGPI are usually associated with galaxy-galaxy interactions. As well as signs of interactions, a transition in the amplitude of rotation is sometimes seen in galaxies with
$\mu_\mathrm{GasFeat}=$
WF) (see Table 2). Kinematic features are proportionally slightly more common in the ionised gas kinematic maps and coexist in only 2 galaxies (MAGPI2310167176 and MAGPI2310199196). Example galaxies with stellar and gas kinematic features are shown in Figs. 8 and 9, respectively. Most show evidence of ongoing interaction, suggesting complex dynamics in MAGPI are usually associated with galaxy-galaxy interactions. As well as signs of interactions, a transition in the amplitude of rotation is sometimes seen in galaxies with
 $\mu_\mathrm{StellFeat}=$
WF.
$\mu_\mathrm{StellFeat}=$
WF.
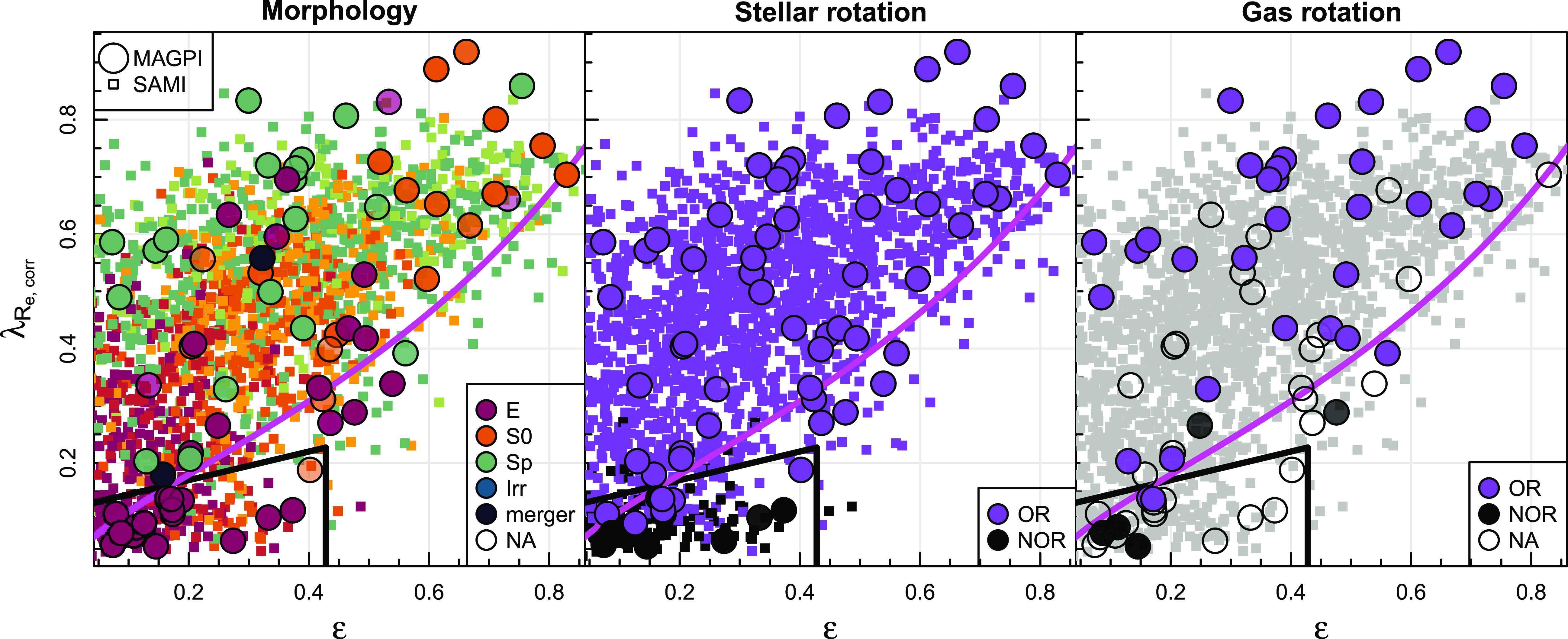
Fig. 10 shows the distribution of MAGPI galaxies with
 $\log_{10}(M_\star/M_\odot)\gt10$
in the spin-ellipticity parameter space as per Derkenne et al. (Reference Derkenne2024). Most slow rotators (galaxies within the black lines) are classified as ellipticals and many show no obvious rotation (NOR) in either the gas (when available) or stars. There are some remarkable exceptions to these trends. There are also 2 GasOR=NOR galaxies that are outside the slow rotator region in Fig. 10: MAGPI1534176099 and MAGPI2306197198. As indicated by the symbol transparency, neither of those classifications are deemed reliable, both having
$\log_{10}(M_\star/M_\odot)\gt10$
in the spin-ellipticity parameter space as per Derkenne et al. (Reference Derkenne2024). Most slow rotators (galaxies within the black lines) are classified as ellipticals and many show no obvious rotation (NOR) in either the gas (when available) or stars. There are some remarkable exceptions to these trends. There are also 2 GasOR=NOR galaxies that are outside the slow rotator region in Fig. 10: MAGPI1534176099 and MAGPI2306197198. As indicated by the symbol transparency, neither of those classifications are deemed reliable, both having
 $P_{\mu_{GasOR}}\lt0.98$
.
$P_{\mu_{GasOR}}\lt0.98$
.
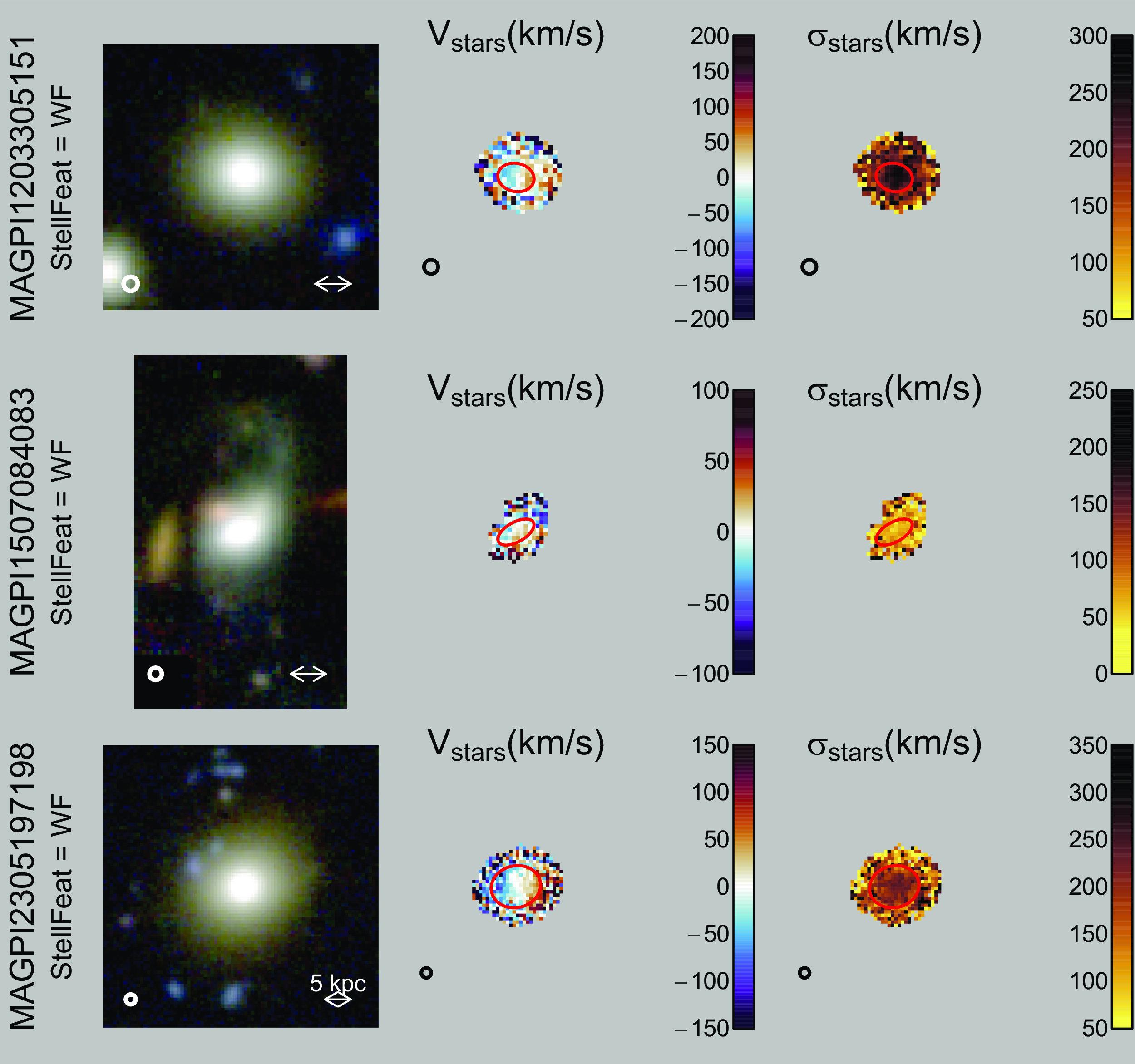
Example MAGPI galaxies with stellar kinematic feature(s). From top to bottom as labelled on the left: MAGPI1203305151 (E with radial change in rotation); MAGPI1507084083 (Merger with complex velocity field); and MAGPI2305197198 (E with radial change in rotation amplitude). From left to right: MAGPI synthetic g, r, i-band colour image of the MAGPI target based on the MUSE data; stellar velocity map; and stellar dispersion map. The PSF is shown as a white or black circle in the bottom-left corner of each panel. All panels within a row are on the same scale, and an arrow representing the physical scale (in kpc) is shown on the left-most panel for each galaxy. Red ellipses represent
 $1R_e$
.
$1R_e$
.
Same as Fig. 8, but with gas kinematic feature(s). From top to bottom as labelled on the left: MAGPI1207128248 (Sp); MAGPI1507084083 (Merger); and MAGPI2304216163
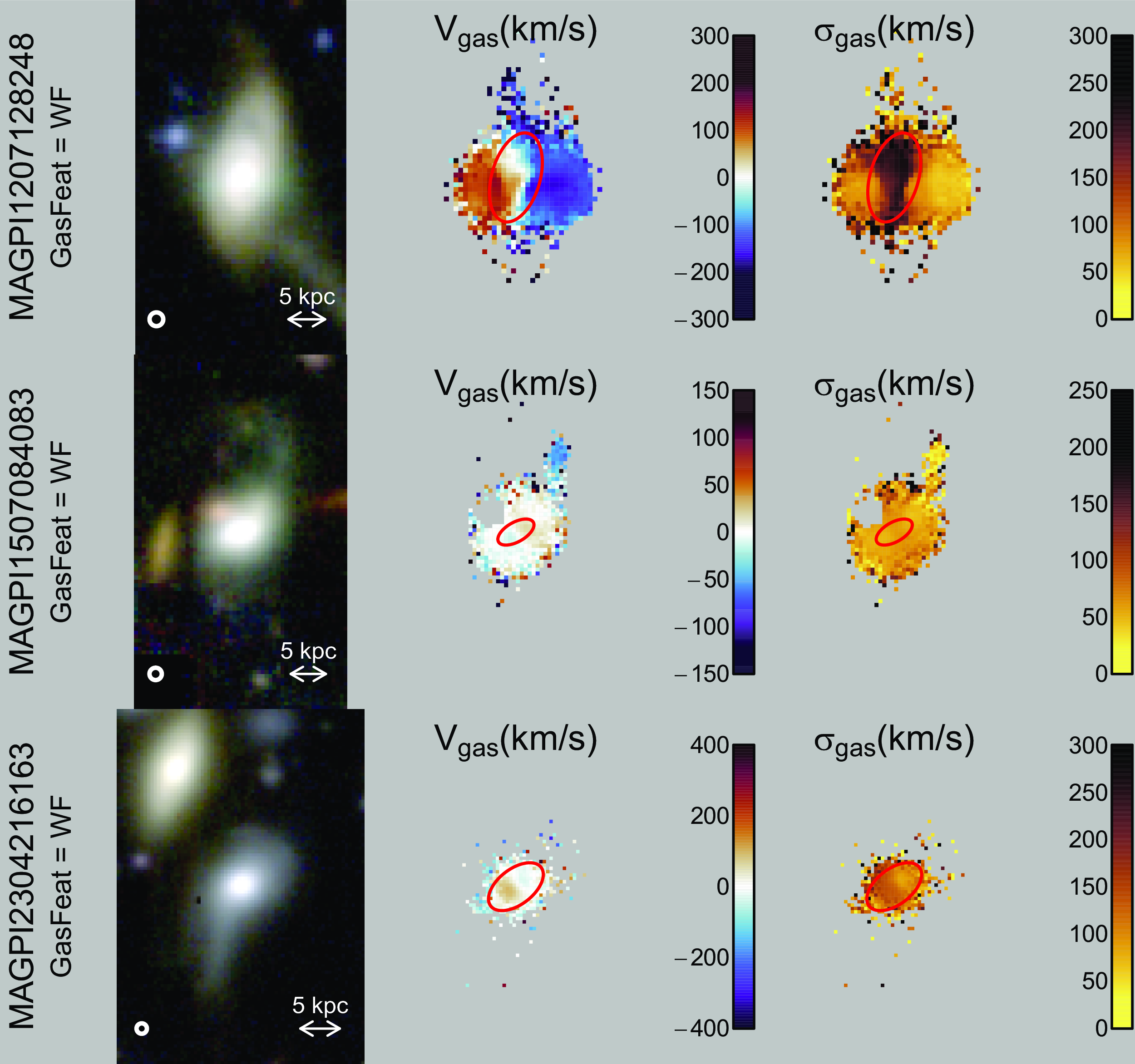
Fig. 11 and Appendix C show that MAGPI galaxies have a mix of visual and kinematic morphologies, with sometimes contrasting gas and stellar kinematic morphologies (also see Fig. 2). Figs. 11, 12 and Appendix C suggest that while the kinematic diversity of galaxies is already in place 3.5 billion years ago, the kinematic morphology–density relation is either too weak to be detected, yet to be established or possibly opposite to what is seen in local surveys. These options are considered in detail in Section 6.
Seeing-corrected spin-ellipticity diagram (
 $\lambda_{R_\mathrm{e, corr}}$
vs.
$\lambda_{R_\mathrm{e, corr}}$
vs.
 $\epsilon$
) for MAGPI (circles) galaxies as per Derkenne et al. (Reference Derkenne2024) and SAMI (squares) galaxies as per van de Sande et al. (Reference van de Sande2017b). SAMI visual morphological and kinematic classifications are taken from Cortese et al. (Reference Cortese2016) and van de Sande et al. (Reference van de Sande2021a), respectively. Data are colour-coded by visual morphology (left), stellar rotation (middle) or gas rotation (right) as per the inset legend. Symbol transparency is inversely proportional to the respective posterior mode probability in each panel (left:
$\epsilon$
) for MAGPI (circles) galaxies as per Derkenne et al. (Reference Derkenne2024) and SAMI (squares) galaxies as per van de Sande et al. (Reference van de Sande2017b). SAMI visual morphological and kinematic classifications are taken from Cortese et al. (Reference Cortese2016) and van de Sande et al. (Reference van de Sande2021a), respectively. Data are colour-coded by visual morphology (left), stellar rotation (middle) or gas rotation (right) as per the inset legend. Symbol transparency is inversely proportional to the respective posterior mode probability in each panel (left:
 $P_{\mu_\mathrm{Morph}}$
, middle:
$P_{\mu_\mathrm{Morph}}$
, middle:
 $P_{\mu_\mathrm{ StellOR}}$
, and right:
$P_{\mu_\mathrm{ StellOR}}$
, and right:
 $P_{\mu_\mathrm{GasOR}}$
). The black lines outline the division between fast and slow rotators suggested by van de Sande et al. (Reference van de Sande2021a). The magenta line shows the semi-empirical prediction for edge-on axisymmetric galaxies with anisotropy parameter
$P_{\mu_\mathrm{GasOR}}$
). The black lines outline the division between fast and slow rotators suggested by van de Sande et al. (Reference van de Sande2021a). The magenta line shows the semi-empirical prediction for edge-on axisymmetric galaxies with anisotropy parameter
 $\beta= 0.70\epsilon_\mathrm{intr}$
, where
$\beta= 0.70\epsilon_\mathrm{intr}$
, where
 $\epsilon_\mathrm{intr}$
is the intrinsic ellipticity (e.g., Cappellari et al. Reference Cappellari2007; Cappellari Reference Cappellari2016). The majority of galaxies that lie within the black lines are ellipticals with a high proportion of galaxies with NOR stars and gas. Hollow symbols are used when a classification is not available (NA).
$\epsilon_\mathrm{intr}$
is the intrinsic ellipticity (e.g., Cappellari et al. Reference Cappellari2007; Cappellari Reference Cappellari2016). The majority of galaxies that lie within the black lines are ellipticals with a high proportion of galaxies with NOR stars and gas. Hollow symbols are used when a classification is not available (NA).
MUSE synthetic g, r, i images for three MAGPI fields included in this work with superimposed gas (small & thin symbols, when present) and stellar (large & thick) visual kinematic morphologies: OR (circles), NOR (squares), WOF (hollow), WF (cross). Colours correspond to the mode of the posterior morphological classification
 $\mu_\mathrm{Morph}$
(see legend on the right). Galaxies have a mix of visual and kinematic morphologies, with sometimes contrasting gas and stellar kinematic morphologies. A gallery of all fields is included in Appendix C.
$\mu_\mathrm{Morph}$
(see legend on the right). Galaxies have a mix of visual and kinematic morphologies, with sometimes contrasting gas and stellar kinematic morphologies. A gallery of all fields is included in Appendix C.

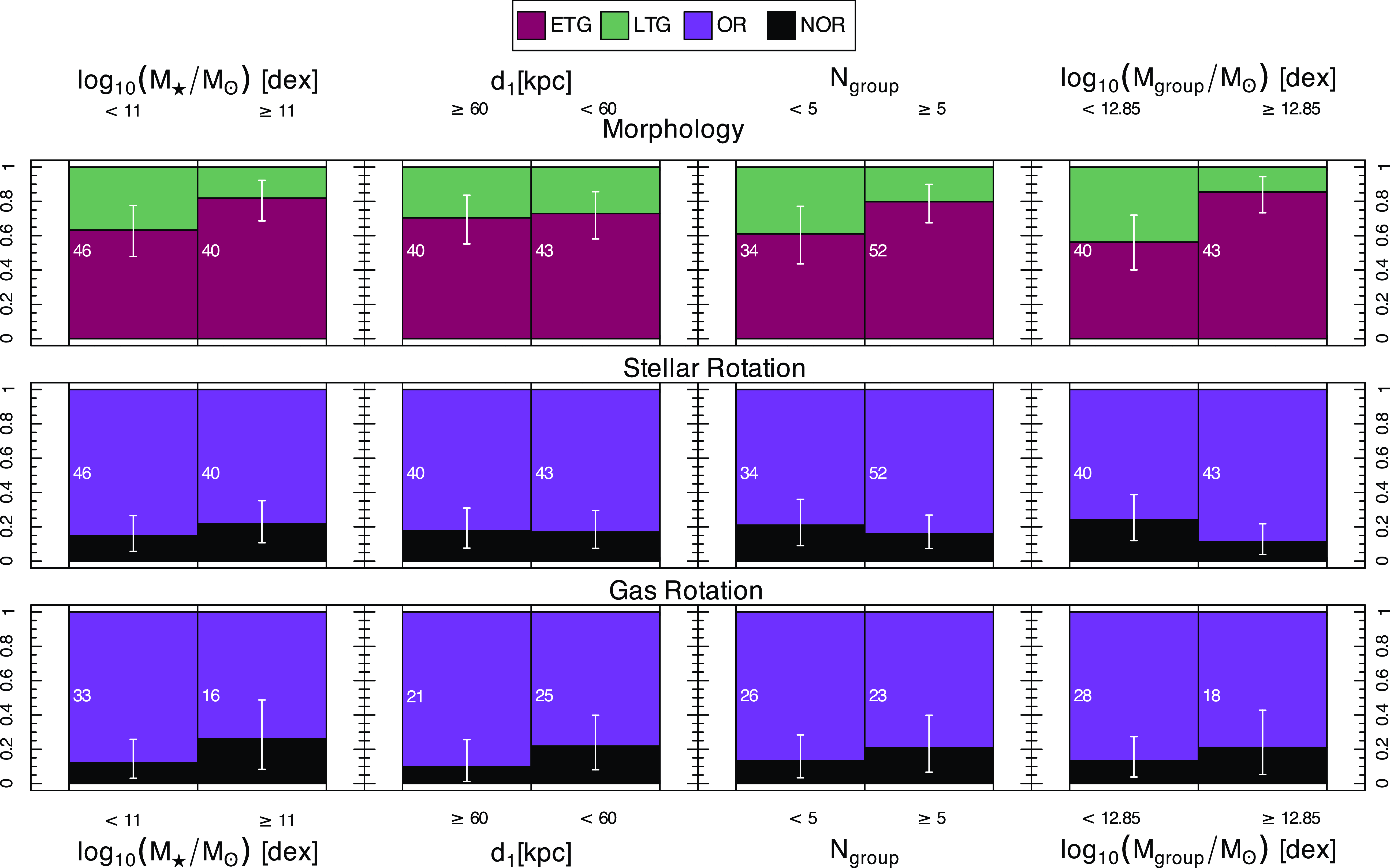
Proportion of early- (red) vs. late- (green) type galaxies (top), stellar (middle) and ionised gas (bottom) with (purple) vs. without obvious (black) rotation (see legend at the top) for the bright sample. Plots show stellar mass (left) and environmental bins for three separate proxies: 1- divided according to the distance to their nearest neighbour (
 $d_1$
, middle left): densest neighborhood (
$d_1$
, middle left): densest neighborhood (
 $d_1\lt60$
kpc, within the range of commonly used thresholds, e.g. Robotham et al. Reference Robotham2014) and lowest density neighborhood (
$d_1\lt60$
kpc, within the range of commonly used thresholds, e.g. Robotham et al. Reference Robotham2014) and lowest density neighborhood (
 $d_1\ge60$
kpc); 2- divided according to the number of galaxies in their group (middle right): isolated and/or small group (
$d_1\ge60$
kpc); 2- divided according to the number of galaxies in their group (middle right): isolated and/or small group (
 $N_\mathrm{group}\lt5$
) and larger groups (
$N_\mathrm{group}\lt5$
) and larger groups (
 $N_\mathrm{group}\ge5$
); and 3- group dynamical mass proxy divided at the median group mass of (
$N_\mathrm{group}\ge5$
); and 3- group dynamical mass proxy divided at the median group mass of (
 $\log M_\mathrm{group}/M_\odot=12.85$
, right). The number of galaxies in each environment bin is shown in white and Bayesian 95% credible intervals are shown as white errorbars (see Table 3).
$\log M_\mathrm{group}/M_\odot=12.85$
, right). The number of galaxies in each environment bin is shown in white and Bayesian 95% credible intervals are shown as white errorbars (see Table 3).
6. Discussion
Given the inherent subjectivity of visual classifications, we have chosen to collect multiple independent classifications on each galaxy and considered parameter. Each of the 637 galaxies included for visual classification has been classified by a minimum of 11 raters. We have found that there is important information in the spread of selected classifications and in the frequency of classifier hesitation to provide a classification that reflect the data quality and some properties of galaxies (i.e. how often classifiers leave a classification as ‘NS’ or deliberately choose ‘IDK’). Studies using visual classifications involving few classifiers are thus subject to biases that are hard to quantify. Bayesian inference provides a statistically coherent way of quantifying our confidence in the true galaxy properties by combining a prior belief of classifier competence with the observed data via an explicit data-generating process. This analysis has also allowed us to quantify some of the conditions that make visual classifications more difficult.
Previous local IFS surveys with comparable spatial resolution in physical units have available ancillary imaging with better spatial resolution and depth than the spectroscopy (e.g. SAMI Cortese et al. Reference Cortese2016 and MaNGA Vázquez-Mata et al. Reference Vázquez-Mata2022). This is not the case for MAGPI, where both images and spectroscopy have the same spatial resolution, MAGPI data themselves usually represent the deepest and best images available for our targets. Difficulties associated with visual classification of small and/or faint galaxies has been raised in the literature (see Vázquez-Mata et al. Reference Vázquez-Mata2022; Tohill et al. Reference Tohill2023; Medina-Rosales, Cabrera-Vives, & Miller Reference Medina-Rosales, Cabrera-Vives and Miller2024, for recent examples). The comparatively coarser spatial resolution of MAGPI images (in physical units) used to perform the visual morphological classifications has led to more uncertain morphological classifications in MAGPI compared to local surveys where comparatively higher quality images are available for visual classification. This has resulted in our inability to reliably differentiate between late and early spirals and difficulties in classifying faint and/or small objects, possibly leading to a bias towards classifying more amorphous earlier type morphologies. The difficulties associated with recognising small structural features in low resolution images is not limited to the current study and should be born in mind for future studies using visual morphological classifications.
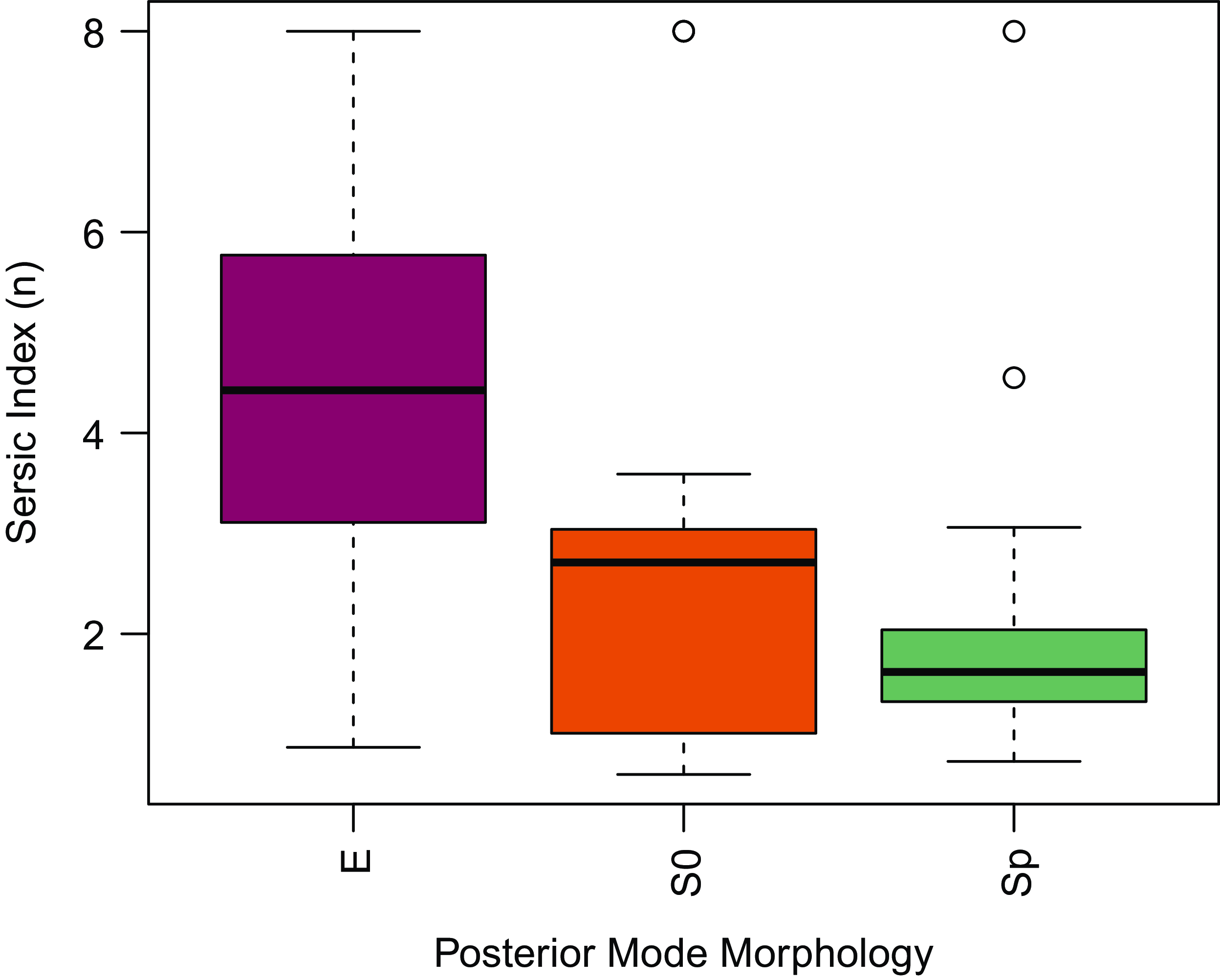
Despite these difficulties, for our bright sample (
 $r\lt20$
mag), we find that earlier types have higher Sérsic indices than later types (Fig. 13) as expected. This is evidence that despite their higher uncertainties, the morphological classifications are informative, especially when considered as a sample. The distributions in posterior mode probabilities shown in Fig. 5 and sample sizes listed in Table 2, along with the dependence of the difficulty on brightness and size (Fig. 4), suggest that at comparable data quality and spatial resolution, bulk rotation is easier to identify than visual morphology. We find that kinematic features (StellFeat and GasFeat), which often represent small scale kinematic anomalies are easier to visually identify than the absence of rotation (i.e. the mean difficulty of StellOR=NOR and GasOR=NOR is higher than the mean difficulty for StellFeat=WF and GasFeat=WF, respectively), although
$r\lt20$
mag), we find that earlier types have higher Sérsic indices than later types (Fig. 13) as expected. This is evidence that despite their higher uncertainties, the morphological classifications are informative, especially when considered as a sample. The distributions in posterior mode probabilities shown in Fig. 5 and sample sizes listed in Table 2, along with the dependence of the difficulty on brightness and size (Fig. 4), suggest that at comparable data quality and spatial resolution, bulk rotation is easier to identify than visual morphology. We find that kinematic features (StellFeat and GasFeat), which often represent small scale kinematic anomalies are easier to visually identify than the absence of rotation (i.e. the mean difficulty of StellOR=NOR and GasOR=NOR is higher than the mean difficulty for StellFeat=WF and GasFeat=WF, respectively), although
 $N_\mathrm{pix}\gt100$
appears to be a lower threshold for identifying StellFeat=WF and GasFeat=WF. This has limited our ability to quantitatively compare our kinematic morphologies of galaxies with samples at different depths and/or spatial resolution (e.g. Krajnović et al. 2011; van de Sande et al. Reference van de Sande2018). Qualitatively, we were able to identify reliable (
$N_\mathrm{pix}\gt100$
appears to be a lower threshold for identifying StellFeat=WF and GasFeat=WF. This has limited our ability to quantitatively compare our kinematic morphologies of galaxies with samples at different depths and/or spatial resolution (e.g. Krajnović et al. 2011; van de Sande et al. Reference van de Sande2018). Qualitatively, we were able to identify reliable (
 $P_{\mu}\gt0.98$
) representatives of nearly all classes within MAGPI (exceptions being irregular and late type spiral morphologies, see examples in Figs. 2 and 7).
$P_{\mu}\gt0.98$
) representatives of nearly all classes within MAGPI (exceptions being irregular and late type spiral morphologies, see examples in Figs. 2 and 7).
Box and whiskers plot showing the quartiles of the distributions of Sérsic indices (n) for bright (
 $r\lt20$
mag) E, S0 and Sp (including both eSp and lSp categories) MAGPI galaxies. As expected, the distribution for elliptical galaxies is skewed towards higher Sérsic indices, while that of Spiral galaxies is skewed towards lower values. Colours are consistent with those of the left-panel of Fig. 10.
$r\lt20$
mag) E, S0 and Sp (including both eSp and lSp categories) MAGPI galaxies. As expected, the distribution for elliptical galaxies is skewed towards higher Sérsic indices, while that of Spiral galaxies is skewed towards lower values. Colours are consistent with those of the left-panel of Fig. 10.
The spatial resolution of MAGPI and SAMI kinematic maps are comparable (SAMI median is
 $\sim1.9$
kpc/FWHM, while the MAGPI bright sample has median
$\sim1.9$
kpc/FWHM, while the MAGPI bright sample has median
 $\sim2.7$
kpc/FWHM) and we have closely followed the methodologies used in SAMI for stellar kinematic visual classifications (i.e. StellOR and StellFeat). We thus compile a methodologically comparable dataset of local (
$\sim2.7$
kpc/FWHM) and we have closely followed the methodologies used in SAMI for stellar kinematic visual classifications (i.e. StellOR and StellFeat). We thus compile a methodologically comparable dataset of local (
 $z\sim 0$
) galaxies with
$z\sim 0$
) galaxies with
 $\log_{10}(M_\star/M_\odot)\gt9.5$
dex from the SAMI Galaxy Survey (Croom et al. Reference Croom2012; Croom et al. Reference Croom2021). We use visual morphologies from Cortese et al. (Reference Cortese2016), spin values from van de Sande et al. (Reference van de Sande2017a) and visual stellar kinematic morphologies from van de Sande et al. (Reference van de Sande2021a). We combine this with GAMA group masses and environment metrics based on Robotham et al. (Reference Robotham2011) (assuming
$\log_{10}(M_\star/M_\odot)\gt9.5$
dex from the SAMI Galaxy Survey (Croom et al. Reference Croom2012; Croom et al. Reference Croom2021). We use visual morphologies from Cortese et al. (Reference Cortese2016), spin values from van de Sande et al. (Reference van de Sande2017a) and visual stellar kinematic morphologies from van de Sande et al. (Reference van de Sande2021a). We combine this with GAMA group masses and environment metrics based on Robotham et al. (Reference Robotham2011) (assuming
 $A=10$
for consistency). Fig. 1 compares the stellar mass, group mass, effective radius and Sérsic index distributions of SAMI and MAGPI galaxies. We note that given the differences in stellar mass distributions, the properties of galaxies in the SAMI sample are not representative of those of the descendants of MAGPI galaxies, thus a direct evolutionary link cannot be inferred between the two samples.
$A=10$
for consistency). Fig. 1 compares the stellar mass, group mass, effective radius and Sérsic index distributions of SAMI and MAGPI galaxies. We note that given the differences in stellar mass distributions, the properties of galaxies in the SAMI sample are not representative of those of the descendants of MAGPI galaxies, thus a direct evolutionary link cannot be inferred between the two samples.
Without referring to evolution, we note that there are distinct similarities between the distributions of SAMI and MAGPI galaxies in the spin-ellipticity parameter space (see Fig. 10), with elliptical galaxies dominating the slow-rotator area (i.e. black lines) and later-types (S0s and Sps) occupying the fast-rotator areas. This shows that locally observed trends with visual morphologies are broadly established 3.5 billions years ago. Indeed, van Houdt et al. (Reference van Houdt2021) have shown that a comparable trend with Sérsic index is noticeable in
 $v/\sigma-\epsilon$
space at even higher redshift (
$v/\sigma-\epsilon$
space at even higher redshift (
 $z\sim 0.8$
) in the LEGA-C survey using dynamical Jeans models of slit spectra.
$z\sim 0.8$
) in the LEGA-C survey using dynamical Jeans models of slit spectra.
Similarly, as seen in SAMI, MAGPI galaxies with/without obvious stellar rotation tend to occupy or lie near the fast-/slow-rotator area in the middle panel of Fig. 10. A study of the spin-evolution of galaxies through comparing carefully selected sub-samples of MAGPI descendent-like MaNGA galaxies is presented in Derkenne et al. (Reference Derkenne2024).
In what follows, we implicitly assume that an ‘evolved’ galaxy is a massive, old, quenched, non-rotating galaxy. We note that evolution to this state needs not be linear (apart for mass) and the order in which those attributes appear will likely depend on the individual galaxy’s merger and star formation history.
While earlier studies of the kinematics and morphologies of galaxies at cosmic noon (
 $z\sim1-3$
) found a predominance of star forming clumpy and discy rotating systems (e.g. Wuyts et al. Reference Wuyts2011; Wisnioski et al. Reference Wisnioski2015; Huertas-Company et al. Reference Huertas-Company2016; Stott et al. Reference Stott2016, but see Rodrigues et al. Reference Rodrigues, Hammer, Flores, Puech and Athanassoula2017), most of dynamical studies necessarily focused on ionised gas as the dynamical tracer. In the local universe, ionised gas and active star formation are predominantly found in late-type systems with discy dynamics. We will briefly assume that a similar link between star formation, morphology and dynamics holds in the early Universe. Recent studies from the James Webb Space Telescope images suggest spheroidal morphologies are the dominant type for masses
$z\sim1-3$
) found a predominance of star forming clumpy and discy rotating systems (e.g. Wuyts et al. Reference Wuyts2011; Wisnioski et al. Reference Wisnioski2015; Huertas-Company et al. Reference Huertas-Company2016; Stott et al. Reference Stott2016, but see Rodrigues et al. Reference Rodrigues, Hammer, Flores, Puech and Athanassoula2017), most of dynamical studies necessarily focused on ionised gas as the dynamical tracer. In the local universe, ionised gas and active star formation are predominantly found in late-type systems with discy dynamics. We will briefly assume that a similar link between star formation, morphology and dynamics holds in the early Universe. Recent studies from the James Webb Space Telescope images suggest spheroidal morphologies are the dominant type for masses
 $\log_{10}M_\star/M_\odot \gt 11$
galaxies in the early Universe (up to
$\log_{10}M_\star/M_\odot \gt 11$
galaxies in the early Universe (up to
 $z\lt8$
, see e.g. Lee et al. Reference Lee, Park, Hwang and Kwon2024), and a quiescent system was found at
$z\lt8$
, see e.g. Lee et al. Reference Lee, Park, Hwang and Kwon2024), and a quiescent system was found at
 $z\sim11$
(Glazebrook et al. Reference Glazebrook2024). If seemingly ‘evolved’ spheroidal and/or quiescent systems are in place early (i.e. at
$z\sim11$
(Glazebrook et al. Reference Glazebrook2024). If seemingly ‘evolved’ spheroidal and/or quiescent systems are in place early (i.e. at
 $z\gt\gt0.3$
) in the history of the Universe, and broadly assuming visual structure mirrors their dynamics as seen in local galaxies, it follows that a commensurate population of dynamically evolved potentially non-rotating galaxies is found in our
$z\gt\gt0.3$
) in the history of the Universe, and broadly assuming visual structure mirrors their dynamics as seen in local galaxies, it follows that a commensurate population of dynamically evolved potentially non-rotating galaxies is found in our
 $z\sim0.3$
sample. Indeed, Lagos et al. (Reference Lagos2018) show that the median spin of slow rotators at redshift
$z\sim0.3$
sample. Indeed, Lagos et al. (Reference Lagos2018) show that the median spin of slow rotators at redshift
 $z\sim0.3$
is only marginally higher than that at
$z\sim0.3$
is only marginally higher than that at
 $z\sim0$
. We note that when comparing the distribution of
$z\sim0$
. We note that when comparing the distribution of
 $\lambda_{R_e}$
as a function of redshift in three separate cosmological simulations, Foster et al. (Reference Foster2021) find that different cosmological simulations obtain distinct predictions at
$\lambda_{R_e}$
as a function of redshift in three separate cosmological simulations, Foster et al. (Reference Foster2021) find that different cosmological simulations obtain distinct predictions at
 $z\sim0.3$
.
$z\sim0.3$
.
The following discussion focuses on stellar kinematics because there is comparable work in the literature. While a population of non-rotators is present at
 $z\sim0.3$
(also see Derkenne et al. Reference Derkenne2024), the fraction of NOR galaxies in environmental bins parametrised by
$z\sim0.3$
(also see Derkenne et al. Reference Derkenne2024), the fraction of NOR galaxies in environmental bins parametrised by
 $N_\mathrm{group}$
and
$N_\mathrm{group}$
and
 $M_\mathrm{group}$
(in stars) is marginally higher in lower density environment bins (see Figs. 12 and 14). This is in agreement with Muñoz López et al. (Reference Muñoz López2024), who did not find evidence that galaxies with higher spins prefer less dense environments at intermediate redshift, but in contrast to that found in local surveys (e.g. Cappellari et al. Reference Cappellari2011; D’Eugenio et al. Reference D’Eugenio, Houghton, Davies and Dalla Bontà2013; Fogarty et al. Reference Fogarty2014; Brough et al. Reference Brough2017; Greene et al. Reference Greene2017). We note that the kinematic morphology–density relation was first found at
$M_\mathrm{group}$
(in stars) is marginally higher in lower density environment bins (see Figs. 12 and 14). This is in agreement with Muñoz López et al. (Reference Muñoz López2024), who did not find evidence that galaxies with higher spins prefer less dense environments at intermediate redshift, but in contrast to that found in local surveys (e.g. Cappellari et al. Reference Cappellari2011; D’Eugenio et al. Reference D’Eugenio, Houghton, Davies and Dalla Bontà2013; Fogarty et al. Reference Fogarty2014; Brough et al. Reference Brough2017; Greene et al. Reference Greene2017). We note that the kinematic morphology–density relation was first found at
 $z\sim0$
in the ATLAS
$z\sim0$
in the ATLAS
 $^{\text{3D}}$
survey (Cappellari et al. Reference Cappellari2011) in a sample roughly 2.5 times the size of that presented here, and with better spatial resolution than that of MAGPI. Fogarty et al. (Reference Fogarty2014) did detect the kinematic morphology–density relation in Abell 85 using SAMI data, but not in the Abell 168 and 2 399 clusters. We next discuss the statistical significance of this result and ascertain whether the differences in resolution and sample size could explain the absence of the stellar kinematic morphology–density relation in MAGPI or whether this result is robust.
$^{\text{3D}}$
survey (Cappellari et al. Reference Cappellari2011) in a sample roughly 2.5 times the size of that presented here, and with better spatial resolution than that of MAGPI. Fogarty et al. (Reference Fogarty2014) did detect the kinematic morphology–density relation in Abell 85 using SAMI data, but not in the Abell 168 and 2 399 clusters. We next discuss the statistical significance of this result and ascertain whether the differences in resolution and sample size could explain the absence of the stellar kinematic morphology–density relation in MAGPI or whether this result is robust.
Group mass cumulative density function (top) and whiskers plot (bottom) for the MAGPI bright sample (left) and SAMI GAMA sample (i.e. excluding cluster galaxies, right). For MAGPI, we use only galaxies with reliable
 $\mu_\mathrm{StellOR}$
(i.e.
$\mu_\mathrm{StellOR}$
(i.e.
 $P_{\mu_\mathrm{StellOR}}\gt0.98$
), while for SAMI we use galaxies with
$P_{\mu_\mathrm{StellOR}}\gt0.98$
), while for SAMI we use galaxies with
 $M_\star\gt10^{9.5}\,\text{ M}_\odot$
and available kinematic morphology from van de Sande et al. (Reference van de Sande2021a). We show the original SAMI sample in lilac (OR) and light grey (NOR) as well as a sample mass-matched to the MAGPI sample in purple (OR) and black (NOR). The relative
$M_\star\gt10^{9.5}\,\text{ M}_\odot$
and available kinematic morphology from van de Sande et al. (Reference van de Sande2021a). We show the original SAMI sample in lilac (OR) and light grey (NOR) as well as a sample mass-matched to the MAGPI sample in purple (OR) and black (NOR). The relative
 $M_\mathrm{group}$
distributions for NOR (black) and OR (purple) galaxies suggest that galaxies without obvious stellar rotation prefer lower group masses than galaxies with obvious rotation in intermediate redshift MAGPI galaxies, while the opposite is true for low redshift SAMI galaxies.
$M_\mathrm{group}$
distributions for NOR (black) and OR (purple) galaxies suggest that galaxies without obvious stellar rotation prefer lower group masses than galaxies with obvious rotation in intermediate redshift MAGPI galaxies, while the opposite is true for low redshift SAMI galaxies.
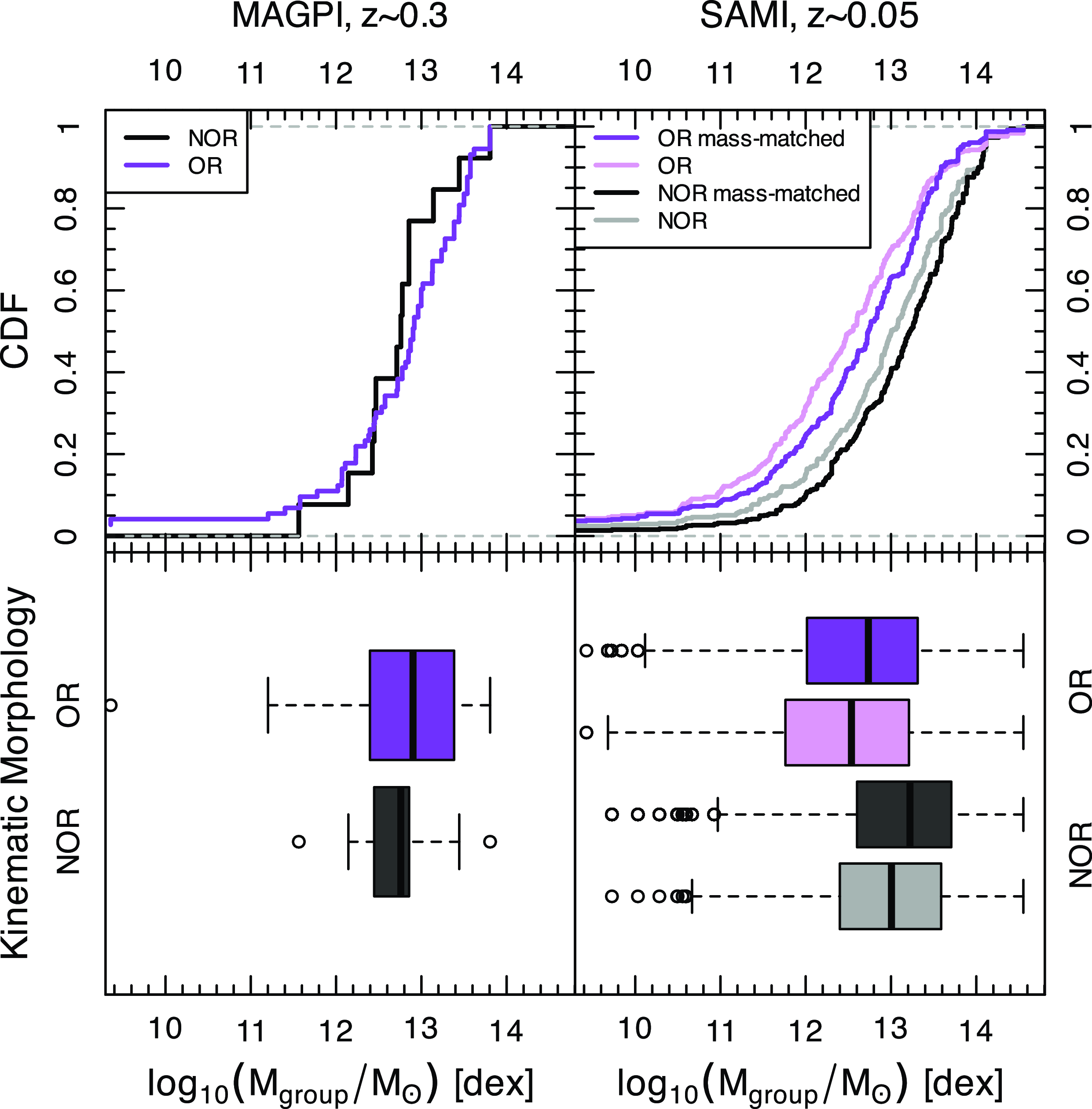
The stellar kinematic morphology–density relation has been shown to be of secondary importance, after the mass (e.g. Greene et al. Reference Greene2017; van de Sande et al. Reference van de Sande2021b; Vaughan et al. Reference Vaughan2024) and age (Croom et al. Reference Croom2024) in local samples. Nevertheless, when one does not account for stellar mass or age (as done here), the environmental trend is clear locally, e.g. using the SAMI dataset (Brough et al. Reference Brough2017, and Fig. 14 of the current work).
However, since there is in fact a lower fraction of NOR in high mass groups, the proportions of stellar NOR galaxies with group mass is reversed in MAGPI compared to SAMI. We want to ascertain our confidence in this result in a way that accounts both for the data and sample size. For each environment tracer (
 $d_1$
,
$d_1$
,
 $N_\mathrm{group}$
and
$N_\mathrm{group}$
and
 $M_\mathrm{group}$
) and environmental bin (low- and high-density), we calculate the posterior distribution of the prevalence of galaxies with StellOR=NOR, based on a non-informative
$M_\mathrm{group}$
) and environmental bin (low- and high-density), we calculate the posterior distribution of the prevalence of galaxies with StellOR=NOR, based on a non-informative
 $\text{Beta}(1,1)$
prior distribution (i.e. we assume a completely non-informative prior belief that the prevalence of NOR galaxies in each bin could be anywhere between 0 and 1) and the Bayesian model for their classifications. This accounts for sampling because as the sample size gets larger, the posterior shifts away from the prior and puts more weight on the observed data. From this, we calculate the posterior probability that the prevalence of galaxies in the low-density bin (
$\text{Beta}(1,1)$
prior distribution (i.e. we assume a completely non-informative prior belief that the prevalence of NOR galaxies in each bin could be anywhere between 0 and 1) and the Bayesian model for their classifications. This accounts for sampling because as the sample size gets larger, the posterior shifts away from the prior and puts more weight on the observed data. From this, we calculate the posterior probability that the prevalence of galaxies in the low-density bin (
 $f_\mathrm{NOR,LD}$
) with StellOR=NOR is higher than that in the high-density bin (
$f_\mathrm{NOR,LD}$
) with StellOR=NOR is higher than that in the high-density bin (
 $f_\mathrm{NOR,HD}$
). When dividing galaxies by group mass, the probability of there being either no or an inverse trend in MAGPI (
$f_\mathrm{NOR,HD}$
). When dividing galaxies by group mass, the probability of there being either no or an inverse trend in MAGPI (
 $p_{\Delta f_\mathrm{NOR}\gt0}=1-p_{\Delta f_\mathrm{NOR}\lt0}$
where
$p_{\Delta f_\mathrm{NOR}\gt0}=1-p_{\Delta f_\mathrm{NOR}\lt0}$
where
 $\Delta f_\mathrm{NOR} = f_\mathrm{NOR,LD}-f_\mathrm{NOR,HD}$
) in Table 3) is 90.9 and 94.4% for the whole and bright samples, respectively. When galaxies are split by the number of group members, the probabilities are 98.5 and 72% for the whole and bright samples, respectively. When galaxies are split by
$\Delta f_\mathrm{NOR} = f_\mathrm{NOR,LD}-f_\mathrm{NOR,HD}$
) in Table 3) is 90.9 and 94.4% for the whole and bright samples, respectively. When galaxies are split by the number of group members, the probabilities are 98.5 and 72% for the whole and bright samples, respectively. When galaxies are split by
 $d_1$
and all galaxies are included, the posterior probability is higher still. This suggests there is some evidence that galaxies with StellOR=NOR may be more common or present in similar proportions in the low-density environment bins in MAGPI when galaxies are divided by group mass or number of group members.
$d_1$
and all galaxies are included, the posterior probability is higher still. This suggests there is some evidence that galaxies with StellOR=NOR may be more common or present in similar proportions in the low-density environment bins in MAGPI when galaxies are divided by group mass or number of group members.
Inferred percentage (%
 $_\mathrm{NOR}$
) and respective 95% credible interval (CrI) of galaxies without obvious stellar rotation (i.e. StellOR=NOR) in high- (column 3) and low-density environments (column 5) in MAGPI. For each environment parameter and environmental bin the number N of galaxies is given in columns 2 and 4. The test is performed on both the whole and bright (
$_\mathrm{NOR}$
) and respective 95% credible interval (CrI) of galaxies without obvious stellar rotation (i.e. StellOR=NOR) in high- (column 3) and low-density environments (column 5) in MAGPI. For each environment parameter and environmental bin the number N of galaxies is given in columns 2 and 4. The test is performed on both the whole and bright (
 $r\lt20$
mag) samples (column 1). The
$r\lt20$
mag) samples (column 1). The
 $\Pr(\text{High} \gt \text{Low})$
value given in column 6 is the posterior probability that there is a higher prevalence of non-rotating galaxies in the denser environment, as seen in the local universe.
$\Pr(\text{High} \gt \text{Low})$
value given in column 6 is the posterior probability that there is a higher prevalence of non-rotating galaxies in the denser environment, as seen in the local universe.
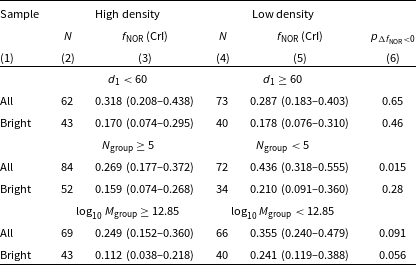
To test the significance of the seeming discrepancy between the kinematic morphology–density relation seen at low redshift and our MAGPI results, we obtain 100 000 samples of 83 SAMI galaxies with agreed upon stellar kinematic morphology classifications taken from van de Sande et al. (Reference van de Sande2021a). Each sample is matched to the mass distribution of MAGPI. For each sample, we record
 $f_\mathrm{ NOR,HD}$
and
$f_\mathrm{ NOR,HD}$
and
 $f_\mathrm{NOR,LD}$
with a division between high and low density at
$f_\mathrm{NOR,LD}$
with a division between high and low density at
 $\log(M_\mathrm{ group}/M_\odot)=12.85$
. This implicitly assumes no evolution between SAMI and MAGPI. Since SAMI did not use a Bayesian framework as used here to obtain posterior probabilities for each classification, we assume that the posterior probability for all SAMI kinematic morphology classifications is uniformly 1. We note that the different choices of methodologies limit our ability to perform a fair comparison and this must be taken as a caveat (also relevant to Fig. 14). We then take 1 000 000 samples of the posterior distributions and find a median and 95% credible interval for
$\log(M_\mathrm{ group}/M_\odot)=12.85$
. This implicitly assumes no evolution between SAMI and MAGPI. Since SAMI did not use a Bayesian framework as used here to obtain posterior probabilities for each classification, we assume that the posterior probability for all SAMI kinematic morphology classifications is uniformly 1. We note that the different choices of methodologies limit our ability to perform a fair comparison and this must be taken as a caveat (also relevant to Fig. 14). We then take 1 000 000 samples of the posterior distributions and find a median and 95% credible interval for
 $\Delta f_\mathrm{NOR} = -0.24(-0.46 - -0.01)$
. The posterior of the probability
$\Delta f_\mathrm{NOR} = -0.24(-0.46 - -0.01)$
. The posterior of the probability
 $p_{\Delta f_\mathrm{NOR}\gt0}$
that
$p_{\Delta f_\mathrm{NOR}\gt0}$
that
 $\Delta f_\mathrm{NOR}$
is positive as seen in MAGPI is strongly skewed at 0 with median
$\Delta f_\mathrm{NOR}$
is positive as seen in MAGPI is strongly skewed at 0 with median
 $0.019$
and 95 percentile
$0.019$
and 95 percentile
 $0.33$
, suggesting that an equal or higher fraction of NOR in low group mass bins would typically randomly occur
$0.33$
, suggesting that an equal or higher fraction of NOR in low group mass bins would typically randomly occur
 $\sim1.9$
% of the time in SAMI.
$\sim1.9$
% of the time in SAMI.
We also look for how often we find a difference in the NOR fraction that is opposite and as or more extreme as that measured in MAGPI. Again, we find that
 $p_{\Delta f_\mathrm{NOR}\gt0.129}$
is strongly peaked at 0, with a median of
$p_{\Delta f_\mathrm{NOR}\gt0.129}$
is strongly peaked at 0, with a median of
 $=0.00070$
and 95 percentile of
$=0.00070$
and 95 percentile of
 $0.061$
, suggesting strong tension between MAGPI and SAMI in the proportions of NOR in low vs. high mass groups. These results qualitatively hold if we exclude cluster galaxies from the SAMI sample (median
$0.061$
, suggesting strong tension between MAGPI and SAMI in the proportions of NOR in low vs. high mass groups. These results qualitatively hold if we exclude cluster galaxies from the SAMI sample (median
 $p_{\Delta f_\mathrm{NOR}\gt0}=0.0082$
, and
$p_{\Delta f_\mathrm{NOR}\gt0}=0.0082$
, and
 $p_{\Delta f_\mathrm{NOR}\gt0.129}=0.00016$
); when using a sample size comparable to that expected for the complete MAGPI survey (i.e. sampling 136 galaxies, median
$p_{\Delta f_\mathrm{NOR}\gt0.129}=0.00016$
); when using a sample size comparable to that expected for the complete MAGPI survey (i.e. sampling 136 galaxies, median
 $p_{\Delta f_\mathrm{NOR}\gt0}=0.0040$
and
$p_{\Delta f_\mathrm{NOR}\gt0}=0.0040$
and
 $p_{\Delta f_\mathrm{NOR}\gt0.129}=0.000023$
); or when matching both the MAGPI stellar mass and Sérsic index distributions simultaneously (median
$p_{\Delta f_\mathrm{NOR}\gt0.129}=0.000023$
); or when matching both the MAGPI stellar mass and Sérsic index distributions simultaneously (median
 $p_{\Delta f_\mathrm{NOR}\gt0}=0.025$
and
$p_{\Delta f_\mathrm{NOR}\gt0}=0.025$
and
 $p_{\Delta f_\mathrm{NOR}\gt0.129}=0.00092$
). In other words, if the kinematic morphology–density relation was similar in both SAMI and MAGPI, we would very likely have detected it. Furthermore, it is highly unlikely that a SAMI-like kinematic morphology–density relation at
$p_{\Delta f_\mathrm{NOR}\gt0.129}=0.00092$
). In other words, if the kinematic morphology–density relation was similar in both SAMI and MAGPI, we would very likely have detected it. Furthermore, it is highly unlikely that a SAMI-like kinematic morphology–density relation at
 $z\sim0.3$
would lead to the result found in MAGPI.
$z\sim0.3$
would lead to the result found in MAGPI.
Simulations also are equivocal about the role of environment in producing slow rotators. Using over 10 000 simulated galaxies in the Horizon-AGN simulation, and echoing the results found in this work, Choi et al. (Reference Choi2018) found similar proportions of slow rotators across all environmental bins, with slow rotation typically resulting from non-merger tidal perturbations in lower density environments. They do however see a weak trend with satellites vs. centrals. While some residual environmental effects were detected after accounting for mass, Lagos et al. (Reference Lagos2018) find that
 $\sim30$
% of slow rotators in over 16 000 EAGLE and HYDRANGEA galaxies have not experienced a recent merger, but their slow rotation can be instead attributed to their residing in lower spin halos than slow rotators formed through major mergers. The multiple formation pathways in simulations indicate that environmental effects need not be the only driver of slow rotation. Comparison of the specific angular momentum of the dark matter halo to that of the stars and HI gas in observed and simulated galaxies confirm that the dynamics of dark matter halo impact those of baryons (e.g., El-Badry et al. Reference El-Badry2018; Romeo, Agertz, & Renaud Reference Romeo, Agertz and Renaud2023, also see Fall & Rodriguez-Gomez Reference Fall and Rodriguez-Gomez2023).
$\sim30$
% of slow rotators in over 16 000 EAGLE and HYDRANGEA galaxies have not experienced a recent merger, but their slow rotation can be instead attributed to their residing in lower spin halos than slow rotators formed through major mergers. The multiple formation pathways in simulations indicate that environmental effects need not be the only driver of slow rotation. Comparison of the specific angular momentum of the dark matter halo to that of the stars and HI gas in observed and simulated galaxies confirm that the dynamics of dark matter halo impact those of baryons (e.g., El-Badry et al. Reference El-Badry2018; Romeo, Agertz, & Renaud Reference Romeo, Agertz and Renaud2023, also see Fall & Rodriguez-Gomez Reference Fall and Rodriguez-Gomez2023).
Relating the 3D shape of slow rotators to their environments, Lagos et al. (Reference Lagos2022) find that intrinsically flat satellite slow rotators are more common in low mass halos, while prolate slow rotators are more common in high mass halos. It may be that the MAGPI selection has favoured flat slow rotators over prolate or round ones. Distinguishing intrinsically prolate, spherical and flat galaxies is challenging observationally (e.g. Méndez-Abreu Reference Méndez-Abreu, Laurikainen, Peletier and Gadotti2016; Bassett & Foster Reference Bassett and Foster2019; Yong et al. Reference Yong2024) and beyond the scope of this work.
The theoretical results outlined above do not rule out the possibility that the preponderance of slow rotation in satellite galaxies may be distinct from that in centrals. The MAGPI selection of fields centered on massive centrals may have skewed the sample towards more massive centrals and less massive satellites than in the general population. This in turn could prevent a fair comparison should slow rotation strongly depend on central vs. satellite status. Indeed, Croom et al. (Reference Croom2024) found that the spin of centrals and satellites had distinct dependencies on environment. We state this as a possible caveat of our analysis. In Foster et al. (Reference Foster2025), we separately account for satellite and central status and find that the impact of environment on centrals and satellites can differ depending on the dynamical parameter studied.
We note that while
 $d_1$
is helpful in identifying potentially interacting galaxies, it is not otherwise a recommended tracer of environment density. Instead, the distance to the
$d_1$
is helpful in identifying potentially interacting galaxies, it is not otherwise a recommended tracer of environment density. Instead, the distance to the
 $N\text{th}$
nearest neighbour (which is not used here as it is not yet available for a large proportion of our galaxies), where
$N\text{th}$
nearest neighbour (which is not used here as it is not yet available for a large proportion of our galaxies), where
 $N\sim5$
is more commonly used (e.g. Muldrew et al. Reference Muldrew2012; Brough et al. Reference Brough2013; de Vos, Merrifield, & Hatch Reference de Vos, Merrifield and Hatch2024). This may further explain why results for
$N\sim5$
is more commonly used (e.g. Muldrew et al. Reference Muldrew2012; Brough et al. Reference Brough2013; de Vos, Merrifield, & Hatch Reference de Vos, Merrifield and Hatch2024). This may further explain why results for
 $d_1$
differ from other measures of environment densities considered herein (i.e.
$d_1$
differ from other measures of environment densities considered herein (i.e.
 $N_\mathrm{group}$
and
$N_\mathrm{group}$
and
 $M_\mathrm{group}$
).
$M_\mathrm{group}$
).
If we take the absence of a stellar kinematic morphology-relation in MAGPI at face value, our findings could indicate a scenario in which many non or slowly rotating MAGPI galaxies have yet to join or their surrounds have yet to grow into high density environments, where such galaxies tend to preferentially be at
 $z\sim0$
. In other words, we speculate that galaxies may grow their mass first and spin down sometime before
$z\sim0$
. In other words, we speculate that galaxies may grow their mass first and spin down sometime before
 $z\sim0.3$
, they subsequently either join dense environments or their environment becomes denser over time. Similarly, Muñoz López et al. (Reference Muñoz López2024) found that spin is not correlated with environment in an independent sample of fast rotators (they did not find any slow rotators) at intermediate redshift (
$z\sim0.3$
, they subsequently either join dense environments or their environment becomes denser over time. Similarly, Muñoz López et al. (Reference Muñoz López2024) found that spin is not correlated with environment in an independent sample of fast rotators (they did not find any slow rotators) at intermediate redshift (
 $0.1 \le z \le 0.8$
). Their sample did not however include the highest density environments.
$0.1 \le z \le 0.8$
). Their sample did not however include the highest density environments.
Under the
 $\Lambda$
CDM paradigm, the largest structures are the latest to form. (Amoura et al. Reference Amoura, Drakos, Berrouet and Taylor2021, see their figure 3) show galaxy clusters (
$\Lambda$
CDM paradigm, the largest structures are the latest to form. (Amoura et al. Reference Amoura, Drakos, Berrouet and Taylor2021, see their figure 3) show galaxy clusters (
 $M\gt10^{15}\,\text{M}_\odot$
) reach 50% of their present day (
$M\gt10^{15}\,\text{M}_\odot$
) reach 50% of their present day (
 $z=0$
) mass around
$z=0$
) mass around
 $z\sim0.35$
. Massive galaxy groups (
$z\sim0.35$
. Massive galaxy groups (
 $M\gt10^{13}\,\text{M}_\odot$
) reach 50% of their present day mass around
$M\gt10^{13}\,\text{M}_\odot$
) reach 50% of their present day mass around
 $z\sim0.6$
. Thus, at intermediate redshift
$z\sim0.6$
. Thus, at intermediate redshift
 $z\sim0.3$
, a large proportion of the most massive clusters are yet to form.
$z\sim0.3$
, a large proportion of the most massive clusters are yet to form.
Environment was already shown to be a second-order effect on determining the rotation state of galaxies, with age being the strongest determinant for stellar spin in local galaxies (Croom et al. Reference Croom2024). In the scenario painted above, if galaxies spin down as they age and grow before their environment is fully assembled, the emerging environmental trend seen in local surveys could be weaker than the mass trend and will likely get stronger as the Universe continues to evolve and structures continue to assemble.
This scenario is reminiscent of the pre-processing (usually referring to star formation quenching) of galaxies in groups or cosmic filaments prior to joining clusters (e.g. Fujita Reference Fujita2004; Sarron et al. Reference Sarron, Adami, Durret and Laigle2019; Sengupta et al. 2022). We suggest that galaxies without obvious rotation may have experienced ‘dynamical pre-processing’ in lower mass halos before progressively being added to higher mass halos after
 $z\sim0.3$
.
$z\sim0.3$
.
7. Conclusions
In this work, we present the results of morphological and dynamical visual classifications for 637 spatially resolved galaxies within 35 MAGPI fields. From this initial sample, we select sub-samples of bright (
 $r \lt 20$
mag) high-confidence (> 0.98) morphological (86 galaxies) and stellar kinematic (82 galaxies) classifications at redshifts (
$r \lt 20$
mag) high-confidence (> 0.98) morphological (86 galaxies) and stellar kinematic (82 galaxies) classifications at redshifts (
 $0.2 \le z \le 0.4$
). Our aim is to identify and quantify the dynamical state of galaxies at intermediate redshifts and look for signs of evolution through comparing with the comparable IFS SAMI Galaxy Survey at
$0.2 \le z \le 0.4$
). Our aim is to identify and quantify the dynamical state of galaxies at intermediate redshifts and look for signs of evolution through comparing with the comparable IFS SAMI Galaxy Survey at
 $z\sim0$
.
$z\sim0$
.
Our conclusions are as follows:
-
1. Despite the difficulty of detecting small scale structures in moderate spatial resolution data, we find examples of a range of morphological types present at intermediate redshift corresponding to
$\sim3.5$
Gyr lookback time. -
2. Similarly, galaxies with and without obvious rotation are already in place at intermediate redshift. The fractions of galaxies with and without obvious rotation mirror those of fast and slow rotators, respectively.
-
3. We do not find a positive trend in the fraction of non-rotating galaxies with group mass (i.e. the stellar kinematic morphology–density relation) within the studied sample in contrast to local studies.

An important caveat is that the MAGPI selection favours lower mass galaxies being satellites of massive centrals, which may have an impact on the dynamical flavours of galaxies included in the sample, especially at lower masses.
If taken at face value, we suggest that the absence of an environmental trend with stellar rotation at
 $z\sim0.3$
(compared to local studies) is consistent with results indicating at most a secondary role for environment. Indeed, environment has been shown to be secondary after mass (e.g. Greene et al. Reference Greene2017; Brough et al. Reference Brough2017; van de Sande et al. Reference van de Sande2021b; Vaughan et al. Reference Vaughan2024) and potentially stellar age (Croom et al. Reference Croom2024) for low redshift IFS surveys. We further expect that environmental trends become more prominent as large scale environments continue to build up as the Universe evolves. In other words, the presence and similar proportions of non-rotating galaxies in both environment bins suggest that galaxies with no obvious stellar rotation were dynamically pre-processed at an earlier epoch. The kinematic morphology–density relation has not yet emerged by
$z\sim0.3$
(compared to local studies) is consistent with results indicating at most a secondary role for environment. Indeed, environment has been shown to be secondary after mass (e.g. Greene et al. Reference Greene2017; Brough et al. Reference Brough2017; van de Sande et al. Reference van de Sande2021b; Vaughan et al. Reference Vaughan2024) and potentially stellar age (Croom et al. Reference Croom2024) for low redshift IFS surveys. We further expect that environmental trends become more prominent as large scale environments continue to build up as the Universe evolves. In other words, the presence and similar proportions of non-rotating galaxies in both environment bins suggest that galaxies with no obvious stellar rotation were dynamically pre-processed at an earlier epoch. The kinematic morphology–density relation has not yet emerged by
 $z\sim0.3$
, suggesting the non-rotating galaxies already present have yet to join denser environments. This will be contrasted with theoretical expectations using mock observations of cosmological simulations.
$z\sim0.3$
, suggesting the non-rotating galaxies already present have yet to join denser environments. This will be contrasted with theoretical expectations using mock observations of cosmological simulations.
Acknowledgement
LMV acknowledges support by the German Academic Scholarship Foundation (Studienstiftung des deutschen Volkes) and the Marianne-Plehn-Program of the Elite Network of Bavaria.
Based on observations collected at the European Organisation for Astronomical Research in the Southern Hemisphere under ESO program 1104.B-0536. We wish to thank the ESO staff, and in particular the staff at Paranal Observatory, for carrying out the MAGPI observations.
MAGPI targets were selected from GAMA. GAMA is a joint European-Australasian project based around a spectroscopic campaign using the Anglo-Australian Telescope. GAMA is funded by the STFC (UK), the ARC (Australia), the AAO, and the participating institutions. GAMA photometry is based on observations made with ESO Telescopes at the La Silla Paranal Observatory under programme ID 179.A-2004, ID 177.A-3016.
This work makes use of colour scales chosen from van der Velden (Reference van der Velden2020).
Data availability statement
The MAGPI raw data (and a basic data reduction) are available through the ESO Science Archive Facility.
Funding statement
CF is the recipient of an Australian Research Council Future Fellowship (project number FT210100168) funded by the Australian Government. CL, JTM and CF are the recipients of and KH acknowledges funding from the Australian Research Council (ARC) Discovery Project DP210101945. AFM was supported by RYC2021-031099-I and PID2021-123313NA-I00 of MICIN/AEI/10.13039/501100011033/FEDER,UE, NextGenerationEU/PRT FDE acknowledges support by the Science and Technology Facilities Council (STFC), by the ERC through Advanced Grant 695671 ‘QUENCH’, and by the UKRI Frontier Research grant RISEandFALL. Part of this research was conducted by the Australian Research Council Centre of Excellence for All Sky Astrophysics in 3 Dimensions (ASTRO 3D), through project number CE170100013.
Competing interests
None.
Appendix A. Extended Dawid–Skene model
We suppose that the given property of galaxy j has true category
 $z_j \in \{1, \ldots, K \}$
, where the prevalence of categories in the population is characterised by the vector
$z_j \in \{1, \ldots, K \}$
, where the prevalence of categories in the population is characterised by the vector
 $\boldsymbol{\pi} = (\pi_1, \ldots, \pi_K)$
such that
$\boldsymbol{\pi} = (\pi_1, \ldots, \pi_K)$
such that
 $z_j \sim \mathrm{Categorical}(\boldsymbol{\pi})$
.
$z_j \sim \mathrm{Categorical}(\boldsymbol{\pi})$
.
Example MAGPI galaxies (as labelled on the left) where
 $P_\mathrm{P,Morph}\lt0.55$
(i.e. a reliable morphology could not be assigned). Left: MAGPI synthetic g, r, i-band colour images with white line (bottom right) showing a 5kpc physical scale and white circle (bottom left) showing the FWHM of the PSF. Right: Histogram showing the number of individual choices for the morphology of each galaxy. The mode of the input (ignoring IDKs) and posterior distributions are shown as vertical purple and red lines, respectively. Most galaxies without a reliable posterior mode morphology are either intermediate morphologies, poorly resolved or have complex (sub-)structures. In some cases, and depending on the individual classifier’s performance, the model favours the relative abundances for the whole sample and assigns ‘E’ (e.g. MAGPI1207227102).
$P_\mathrm{P,Morph}\lt0.55$
(i.e. a reliable morphology could not be assigned). Left: MAGPI synthetic g, r, i-band colour images with white line (bottom right) showing a 5kpc physical scale and white circle (bottom left) showing the FWHM of the PSF. Right: Histogram showing the number of individual choices for the morphology of each galaxy. The mode of the input (ignoring IDKs) and posterior distributions are shown as vertical purple and red lines, respectively. Most galaxies without a reliable posterior mode morphology are either intermediate morphologies, poorly resolved or have complex (sub-)structures. In some cases, and depending on the individual classifier’s performance, the model favours the relative abundances for the whole sample and assigns ‘E’ (e.g. MAGPI1207227102).
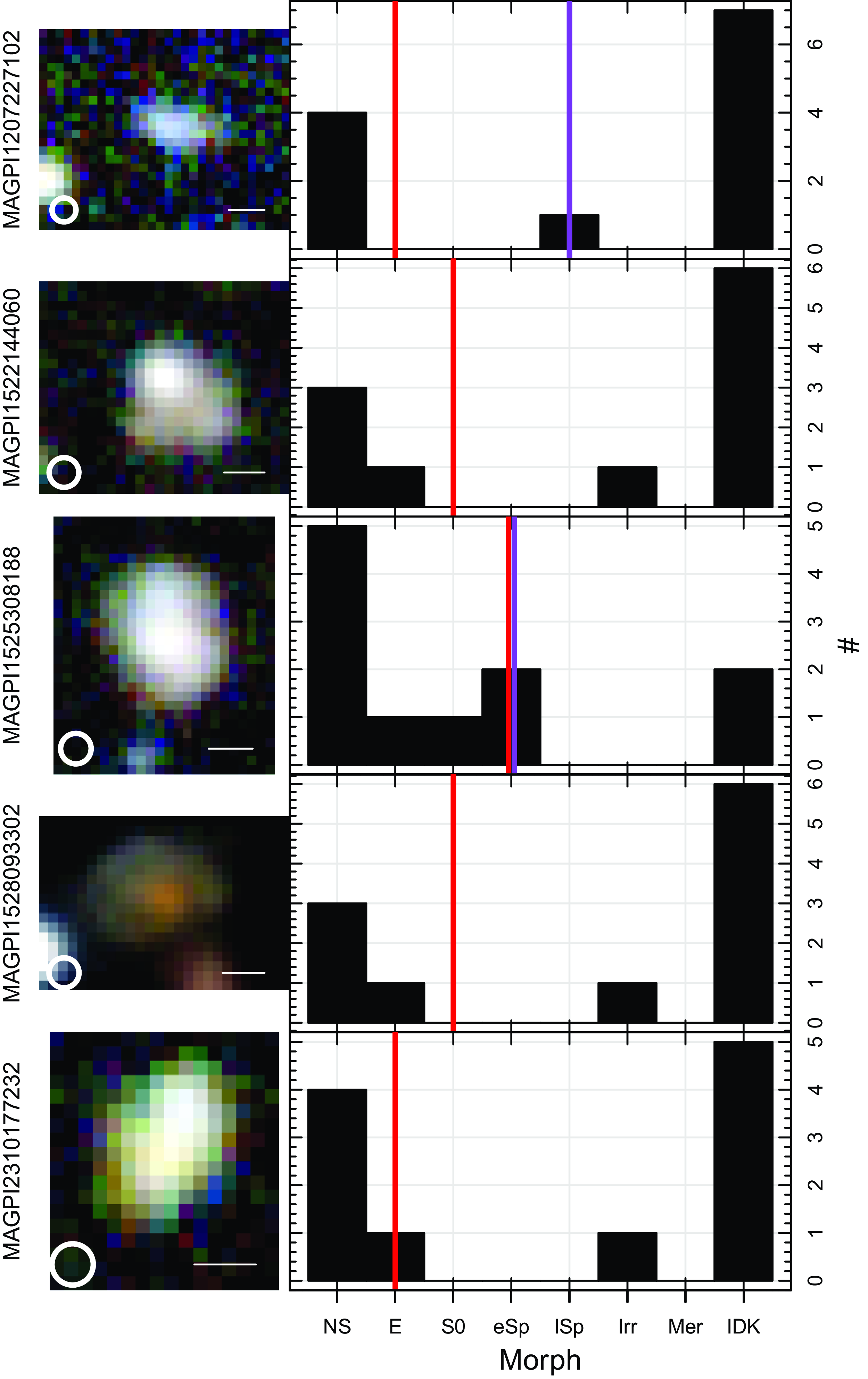
Let
 $d_j \in (0, 1)$
denote a measure of ‘difficulty’ in visually classifying galaxy j, and
$d_j \in (0, 1)$
denote a measure of ‘difficulty’ in visually classifying galaxy j, and
 $c_i \in \mathbb{R}$
a measure of relative ‘confidence’ for classifier i to provide a classification. We model the probability that classifier i’s response
$c_i \in \mathbb{R}$
a measure of relative ‘confidence’ for classifier i to provide a classification. We model the probability that classifier i’s response
 $Y_{ij}$
when shown galaxy j is NS or IDK as
$Y_{ij}$
when shown galaxy j is NS or IDK as
 $$ \Pr(Y_{ij} \in \{\mathrm{NS}, \mathrm{IDK}\}) = \frac{d_j \exp(-c_i)}{1 - d_j(1 - \exp(-c_i))},$$
$$ \Pr(Y_{ij} \in \{\mathrm{NS}, \mathrm{IDK}\}) = \frac{d_j \exp(-c_i)}{1 - d_j(1 - \exp(-c_i))},$$
such that
 $d_j$
can be interpreted as the probability that the ‘average’ classifier (with
$d_j$
can be interpreted as the probability that the ‘average’ classifier (with
 $c_i = 0$
) would not provide a classification, and
$c_i = 0$
) would not provide a classification, and
 $c_i$
is the logarithm of the odds ratio comparing the probability that classifier i provides a classification for a given galaxy to that of the average classifier.
$c_i$
is the logarithm of the odds ratio comparing the probability that classifier i provides a classification for a given galaxy to that of the average classifier.
When providing a classification, classifier i’s response when shown a galaxy with true parameter z is characterised by the ‘response tendency’ vector
 $\boldsymbol{\theta}_{iz} = (\theta_{iz1}, \ldots, \theta_{izK}) \in \Delta^K$
. Specifically,
$\boldsymbol{\theta}_{iz} = (\theta_{iz1}, \ldots, \theta_{izK}) \in \Delta^K$
. Specifically,
 $$ \Pr(Y_{ij} = k \mid Y_{ij} \notin \{ \mathrm{NS}, \mathrm{IDK} \}) = \delta(\theta_{iz_jk}, d_j)$$
$$ \Pr(Y_{ij} = k \mid Y_{ij} \notin \{ \mathrm{NS}, \mathrm{IDK} \}) = \delta(\theta_{iz_jk}, d_j)$$
where
 $\delta: [0,1]^2 \mapsto [0,1]$
is a function which describes how these tendencies approach a uniform distribution as difficulty increases:
$\delta: [0,1]^2 \mapsto [0,1]$
is a function which describes how these tendencies approach a uniform distribution as difficulty increases:
 $$ \delta(\theta, d) = \frac{\theta(1 - d) + d\alpha}{1 - d(1 - K\alpha)}$$
$$ \delta(\theta, d) = \frac{\theta(1 - d) + d\alpha}{1 - d(1 - K\alpha)}$$
such that
 $\delta(\theta, 0) = \theta$
(so
$\delta(\theta, 0) = \theta$
(so
 $\boldsymbol{\theta}_{iz}$
can be interpreted as the response tendencies for classifier i when shown a galaxy of type z with hypothetical zero difficulty),
$\boldsymbol{\theta}_{iz}$
can be interpreted as the response tendencies for classifier i when shown a galaxy of type z with hypothetical zero difficulty),
 $\delta(\theta, 1) = 1/K$
and
$\delta(\theta, 1) = 1/K$
and
 $\alpha \gt 0$
controls how quickly the diffusion towards uniformity occurs as difficulty increases.
$\alpha \gt 0$
controls how quickly the diffusion towards uniformity occurs as difficulty increases.
MAGPI galaxies (as labelled on the left) where
 $P_\mathrm{P,StellOR}\lt0.55$
and
$P_\mathrm{P,StellOR}\lt0.55$
and
 $P_\mathrm{P,StellFeat}\lt0.55$
(i.e. reliable StellOR and StellFeat could not be assigned). Stellar velocity (
$P_\mathrm{P,StellFeat}\lt0.55$
(i.e. reliable StellOR and StellFeat could not be assigned). Stellar velocity (
 $V_\mathrm{star}$
, left) and dispersion (
$V_\mathrm{star}$
, left) and dispersion (
 $\sigma$
, left-centre) kinematic maps with black circle (bottom left on each panel) showing the PSF. Histogram showing the number of individual choices for StellOR (centre-left) and StellFeat (centre-right) for each galaxy. The mode of the input (ignoring IDKs) and posterior distributions are shown as vertical purple and red lines, respectively. Galaxies without reliable posterior modes for StellOR and StellFeat have complex stellar kinematic maps.
$\sigma$
, left-centre) kinematic maps with black circle (bottom left on each panel) showing the PSF. Histogram showing the number of individual choices for StellOR (centre-left) and StellFeat (centre-right) for each galaxy. The mode of the input (ignoring IDKs) and posterior distributions are shown as vertical purple and red lines, respectively. Galaxies without reliable posterior modes for StellOR and StellFeat have complex stellar kinematic maps.
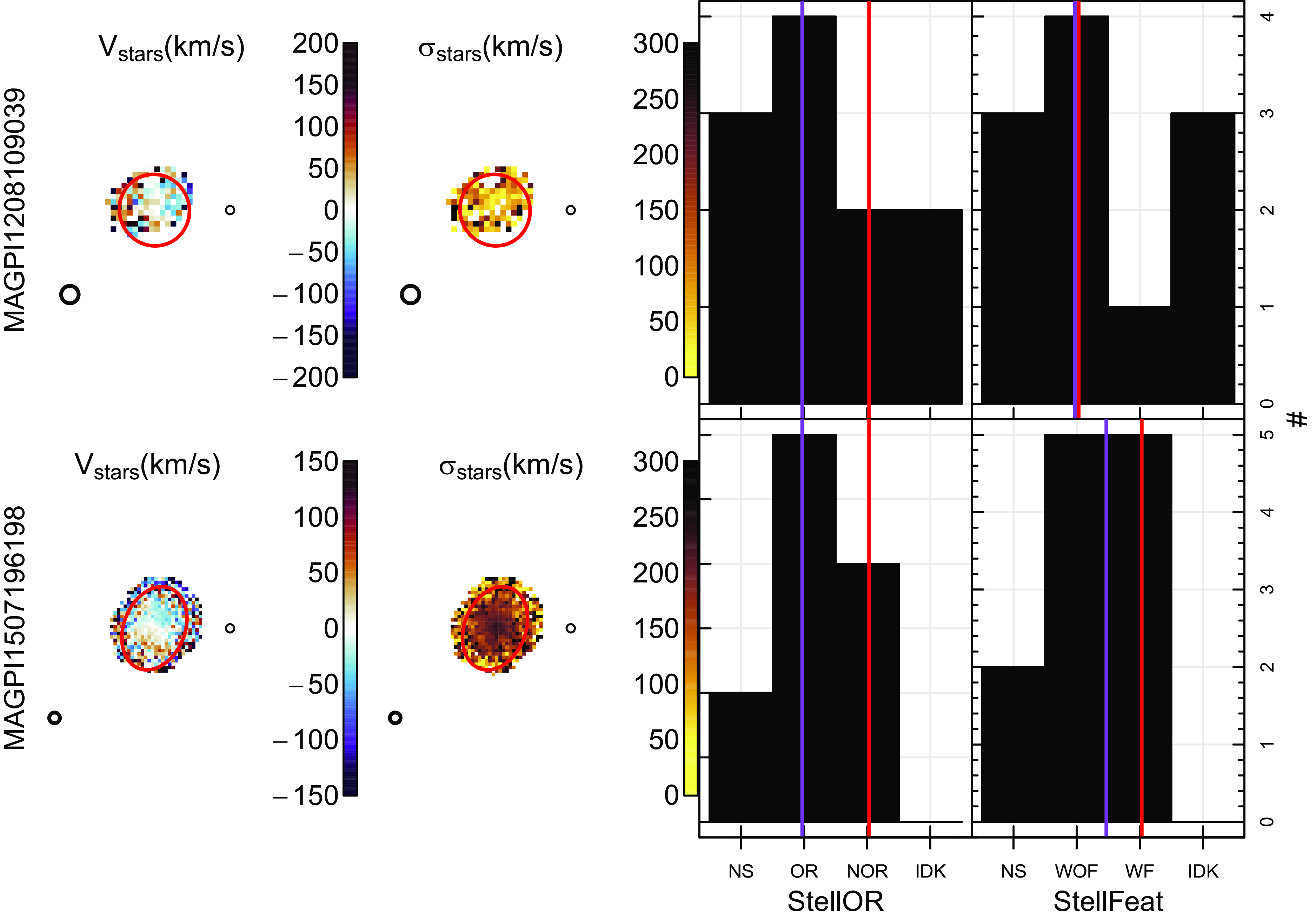
For Bayesian inference, we used weakly informative priors. For
 $\boldsymbol{\pi}$
we used a symmetric Dirichlet prior with all parameters equal to 1. For each
$\boldsymbol{\pi}$
we used a symmetric Dirichlet prior with all parameters equal to 1. For each
 $\boldsymbol{\theta}_{iz}$
we used a Dirichlet prior with parameter equal to
$\boldsymbol{\theta}_{iz}$
we used a Dirichlet prior with parameter equal to
 $7(K-1)/6$
on the correct classification and
$7(K-1)/6$
on the correct classification and
 $1/2$
on each incorrect classification. Each difficulty
$1/2$
on each incorrect classification. Each difficulty
 $d_j$
was modelled as being drawn from a Beta distribution, with a
$d_j$
was modelled as being drawn from a Beta distribution, with a
 $\mathrm{Uniform}(0, 1)$
hyperprior on the mean parameter and a
$\mathrm{Uniform}(0, 1)$
hyperprior on the mean parameter and a
 $\mathrm{Pareto}(0.1, 1.5)$
hyperprior on the ‘sample size’ parameter (Gelman et al. Reference Gelman2013, Chapter 5). Each relative confidence
$\mathrm{Pareto}(0.1, 1.5)$
hyperprior on the ‘sample size’ parameter (Gelman et al. Reference Gelman2013, Chapter 5). Each relative confidence
 $c_i$
was modelled as being drawn from a normal distribution, with zero mean and a half-normal hyperprior with scale
$c_i$
was modelled as being drawn from a normal distribution, with zero mean and a half-normal hyperprior with scale
 $3/(\Phi^{-1}(0.975)\Phi^{-1}(0.995)) = 0.594$
on its standard deviation. For the logarithm of
$3/(\Phi^{-1}(0.975)\Phi^{-1}(0.995)) = 0.594$
on its standard deviation. For the logarithm of
 $\alpha$
, we used a half-normal prior with scale
$\alpha$
, we used a half-normal prior with scale
 $2/\Phi^{-1}(0.995) = 0.776$
.
$2/\Phi^{-1}(0.995) = 0.776$
.
For each parameter, we ran 8 Markov chains each for at least 13 000 steps following 2 000 steps of adaptive burn-in. We performed diagnostic checks to ensure that the algorithm successfully explored the posterior and that posterior quantities were well-estimated. For each classifier, for each galaxy, and overall, we compared the posterior predictive distribution of responses to the observed data in order to confirm the adequacy of the model (Gelman et al. Reference Gelman2013, Chapter 6). For each galaxy j, we extracted the posterior mean of the difficulty parameter,
 $D = \mathbb{E}(d_j \mid \boldsymbol{Y})$
, and the posterior probabilities that the true category corresponded to each option k,
$D = \mathbb{E}(d_j \mid \boldsymbol{Y})$
, and the posterior probabilities that the true category corresponded to each option k,
 $P_k = \Pr(z_j = k \mid \boldsymbol{Y})$
. The posterior mode was the category with the largest posterior probability,
$P_k = \Pr(z_j = k \mid \boldsymbol{Y})$
. The posterior mode was the category with the largest posterior probability,
 $\mu = \mathrm{argmax}_k P_k$
.
$\mu = \mathrm{argmax}_k P_k$
.
Appendix B. Failed classifications
In this section, we show example galaxies for which reliable classifications could not be obtained. Fig. B1 shows example galaxies with
 $P_{\mu_\mathrm{Morph}}\lt0.55$
, illustrating that most galaxies for which a reliable morphology classification could not be obtained are either intermediate morphologies, poorly resolved or have complex structures.
$P_{\mu_\mathrm{Morph}}\lt0.55$
, illustrating that most galaxies for which a reliable morphology classification could not be obtained are either intermediate morphologies, poorly resolved or have complex structures.
Fig. B2 shows all galaxies for which
 $P_{\mu_\mathrm{StellOR}}\lt0.55$
and
$P_{\mu_\mathrm{StellOR}}\lt0.55$
and
 $P_{\mu_\mathrm{ StellFeat}}\lt0.55$
. In those cases, the stellar kinematic maps show complex stellar kinematic maps.
$P_{\mu_\mathrm{ StellFeat}}\lt0.55$
. In those cases, the stellar kinematic maps show complex stellar kinematic maps.
Fig. B3 shows all galaxies for which
 $P_{\mu_\mathrm{GasOR}}\lt0.55$
and
$P_{\mu_\mathrm{GasOR}}\lt0.55$
and
 $P_{\mu_\mathrm{GasFeat}}\lt0.55$
. In those cases, the ionised gas kinematic maps are sparsely sampled.
$P_{\mu_\mathrm{GasFeat}}\lt0.55$
. In those cases, the ionised gas kinematic maps are sparsely sampled.
Same as Fig. B2, but for the ionised gas kinematics. Galaxies without reliable posterior modes for StellOR and StellFeat have sparse ionised gas kinematic maps.
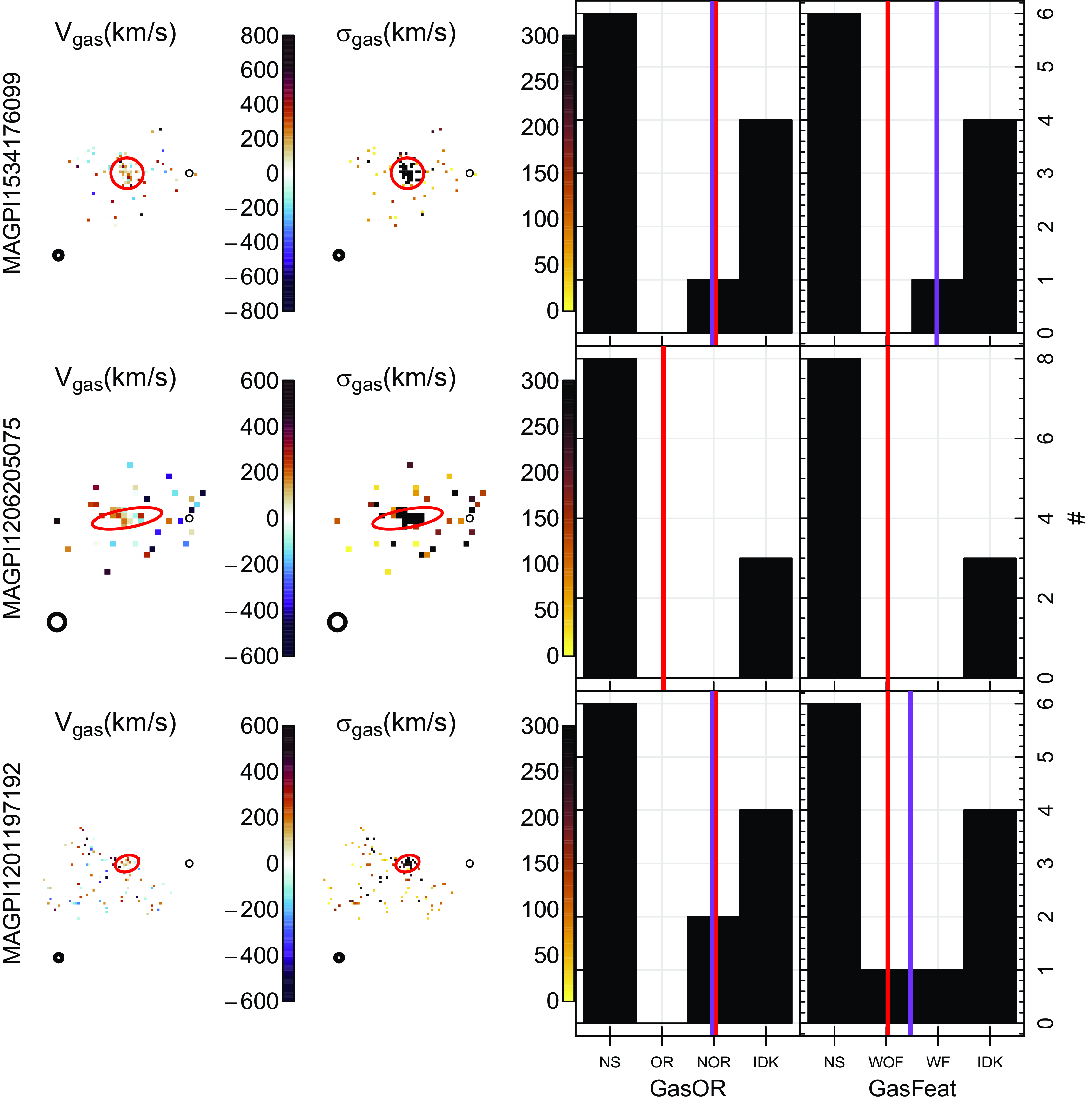
In Fig. 4, we show that the difficulty in classifying galaxies correlates with their brightness, size and the number of pixels shown in the relevant maps. Similarly, in Fig. B4 we compare the posterior mode probabilities with the brightness and size of galaxies. In all but StellFeat and GasFeat and consistently with results shown in Fig. 4, there is more scatter towards low posterior probabilities as the magnitude increases (i.e. faint galaxies have more low posterior probabilities classifications than bright ones). Similarly, there are proportionally more high confidence classifications for galaxies with larger apparent sizes (
 $R_e$
in arcsec) than for their smaller counterparts.
$R_e$
in arcsec) than for their smaller counterparts.
Percentile function for the posterior mode probability
 $PF ({\mu})$
for Morph, StellOR, StellFeat, GasOR and GasFeat (top to bottom) on galaxy luminosity (i.e. r-band magnitude, left) and apparent effective radius (
$PF ({\mu})$
for Morph, StellOR, StellFeat, GasOR and GasFeat (top to bottom) on galaxy luminosity (i.e. r-band magnitude, left) and apparent effective radius (
 $R_\mathrm{e,profound}$
, middle) as per ProFound. Points are colour coded according to their posterior mode as per the legend in the right-most panel of each row. The distributions of
$R_\mathrm{e,profound}$
, middle) as per ProFound. Points are colour coded according to their posterior mode as per the legend in the right-most panel of each row. The distributions of
 $P_\mathrm{M}$
are shown as vertical histograms (right). Red dashed line shows the bright galaxies threshold
$P_\mathrm{M}$
are shown as vertical histograms (right). Red dashed line shows the bright galaxies threshold
 $r\sim20$
mag. The scatter towards lower values of
$r\sim20$
mag. The scatter towards lower values of
 $P_{\mu}$
increases dramatically for objects fainter than
$P_{\mu}$
increases dramatically for objects fainter than
 $r\sim20$
mag and at small sizes (
$r\sim20$
mag and at small sizes (
 $R_\mathrm{e,profound} \sim 1-1.5$
depending on the feature).
$R_\mathrm{e,profound} \sim 1-1.5$
depending on the feature).
Appendix C. Kinematic Classifications Summary
This section shows a gallery of the MAGPI synthetic colour images for the MAGPI fields included in this work with visual and kinematic morphologies superimposed (Fig. C1). A small subset of these is shown in Fig. 11 in the main body of the manuscript.
Same as Fig. 11, but for all MAGPI fields included in this work. For each field, a MUSE synthetic g, r, i image is superimposed with gas and stellar visual kinematic morphologies:
 $\mu_\mathrm{StellOR}=$
OR (large thick circles),
$\mu_\mathrm{StellOR}=$
OR (large thick circles),
 $\mu_\mathrm{GasOR}=$
OR (when available, small thin circles),
$\mu_\mathrm{GasOR}=$
OR (when available, small thin circles),
 $\mu_\mathrm{StellOR}=$
NOR (large thick squares),
$\mu_\mathrm{StellOR}=$
NOR (large thick squares),
 $\mu_\mathrm{GasOR}=$
OR (when available, small thin squares),
$\mu_\mathrm{GasOR}=$
OR (when available, small thin squares),
 $\mu_\mathrm{StellFeat}=$
WOF and
$\mu_\mathrm{StellFeat}=$
WOF and
 $\mu_\mathrm{ GasFeat}=$
WOF (hollow symbols),
$\mu_\mathrm{ GasFeat}=$
WOF (hollow symbols),
 $\mu_\mathrm{GasFeat}=$
WF and/or
$\mu_\mathrm{GasFeat}=$
WF and/or
 $\mu_\mathrm{StellFeat}=$
WF (thick and/or thin cross). Colours correspond to the mode of the posterior morphological classification
$\mu_\mathrm{StellFeat}=$
WF (thick and/or thin cross). Colours correspond to the mode of the posterior morphological classification
 $\mu_\mathrm{Morph}$
(see legend on the next page). In contrast to local surveys, there are many cases of NOR satellites and OR centrals, suggesting that while the kinematic diversity of galaxies is already established, the kinematic morphology–density relation is yet to be established.
$\mu_\mathrm{Morph}$
(see legend on the next page). In contrast to local surveys, there are many cases of NOR satellites and OR centrals, suggesting that while the kinematic diversity of galaxies is already established, the kinematic morphology–density relation is yet to be established.


























































































 Open access
Open access