



1. Introduction
The flow of particulate suspensions is central to a range of industrial, geophysical and biological processes. Suspensions of rigid colloids exhibit complex rheological behaviours, including discontinuous shear-thickening (DST), characterised by an orders-of-magnitude increase in viscosity with shear rate above a critical particle volume fraction (Guazzelli & Pouliquen Reference Guazzelli and Pouliquen2018; Ness, Seto & Mari Reference Ness, Seto and Mari2022). This is a direct consequence of inter-particle interactions, particularly those that constrain rotational and translational degrees of freedom of the particles (Wyart & Cates Reference Wyart and Cates2014; Hsiao et al. Reference Hsiao, Saha-Dalal, Larson and Solomon2017b ; Singh et al. Reference Singh, Ness, Seto, de Pablo and Jaeger2020). However, classical lubrication theory for smooth spherical particles predicts forces and torques that are too weak to enforce these constraints (Foss & Brady Reference Foss and Brady2000; Melrose & Ball Reference Melrose and Ball2004).
Meanwhile, a growing body of experimental evidence implicates surface roughness as the main cause for particle-scale kinematic constraints and DST (Hsiao et al. Reference Hsiao, Jamali, Glynos, Green, Larson and Solomon2017a , Reference Hsiao, Saha-Dalal, Larson and Solomonb ; Hsu et al. Reference Hsu, Ramakrishna, Zanini, Spencer and Isa2018; Schroyen et al. Reference Schroyen, Hsu, Isa, Van Puyvelde and Vermant2019; Yanagishima et al. Reference Yanagishima, Liu, Tanaka and Dullens2021; Ilhan, Mugele & Duits Reference Ilhan, Mugele and Duits2022; Pradeep, Wessel & Hsiao Reference Pradeep, Wessel and Hsiao2022; Ilhan et al. Reference Ilhan, Mugele and Duits2022). One potential consequence of this roughness is for particles to make physical contact at high volume fractions, marking a transition from lubrication to frictional behaviour (Lemaire et al. Reference Lemaire, Blanc, Claudet, Gallier, Lobry and Peters2023). Theoretical models of pairwise rough-particle interactions have typically combined hydrodynamic and contact interactions (da Cunha & Hinch Reference da Cunha and Hinch1996; Zhao, Galvin & Davis Reference Zhao, Galvin and Davis2002; Zhao & Davis Reference Zhao and Davis2003; Davis et al. Reference Davis, Zhao, Galvin and Wilson2003; Blanc, Peters & Lemaire Reference Blanc, Peters and Lemaire2011). Suspension-scale simulations adopting the frictional-interaction framework have reproduced several experimentally observed rheological features including DST (Seto et al. Reference Seto, Mari, Morris and Denn2013; Fernandez et al. Reference Fernandez, Mani, Rinaldi, Kadau, Mosquet, Lombois-Burger, Cayer-Barrioz, Herrmann, Spencer and Isa2013; Wyart & Cates Reference Wyart and Cates2014; Mari et al. Reference Mari, Seto, Morris and Denn2014; Gallier et al. Reference Gallier, Lemaire, Peters and Lobry2014; Townsend & Wilson Reference Townsend and Wilson2017). Simulations of suspension rheology have also studied the effects of contact elasticity (More & Ardekani Reference More and Ardekani2020a , Reference More and Ardekanib , Reference More and Ardekani2021) and a velocity-dependent coefficient of friction (Ruiz-Lopez et al. Reference Ruiz-Lopez, Prasanna Kumar, Vazquez-Quesada, de Vicente and Ellero2023). Recent work (Dumont et al. Reference Dumont, Rocha, Nicolas and Pouliquen2025) has shown that DST can occur even for dry grains, and can be modelled with a non-Coulombic friction law.
By contrast, Stokesian hydrodynamic simulations of suspensions (Jamali & Brady Reference Jamali and Brady2019) that explicitly account for the rough-particle geometry have recovered rheological signatures without invoking contact friction. Wang, Jamali & Brady (Reference Wang, Jamali and Brady2020) implement a phenomenological modification of lubrication forces to model roughness in simulations of suspensions of otherwise smooth spheres and also recover rheology resembling DST without contact forces. This suggests a need to better understand the implications of roughness on hydrodynamic interactions between particles even before they come into contact (Ness et al. Reference Ness, Seto and Mari2022). Systematic efforts to understand hydrodynamic features at the asperity scale (and implications thereof on particle-scale forces) have focused either on small roughness amplitude, or on the interaction of a single rough surface with a smooth one (Kurzthaler et al. Reference Kurzthaler, Zhu, Pahlavan and Stone2020; Chase, Kurzthaler & Stone Reference Chase, Kurzthaler and Stone2022; Yariv et al. Reference Yariv, Brandão, Wood, Szafraniec, Higgins, Bazazi, Pearce and Stone2024; Kargar-Estahbanati & Rallabandi Reference Kargar-Estahbanati and Rallabandi2025). These studies have identified modified hydrodynamic interaction laws, but do not reproduce the strong rotational constraints necessary to explain suspension rheology.
Here, we develop a rigorous thin-film theory for interactions of suspended rough particles close to contact. In particular, we focus on situations where both surfaces are rough, as is the case in most practical situations, allowing asperities on opposing surfaces to interact hydrodynamically with each other. We show that hydrodynamic features at the scale of roughness asperities lead to large point-like tangential forces and torques that greatly exceed their smooth counterparts, as well as those that arise when a rough surface interacts with a smooth one. The forces grow as the inverse of the separation distance
 $1/d$
, in contrast with the weak
$1/d$
, in contrast with the weak
 $\log d$
scaling for smooth spheres. Even in the absence of physical contact, these hydrodynamic singularities enforce a rolling constraint on the particles, exhibiting characteristics reminiscent of dry contact friction.
$\log d$
scaling for smooth spheres. Even in the absence of physical contact, these hydrodynamic singularities enforce a rolling constraint on the particles, exhibiting characteristics reminiscent of dry contact friction.
2. Set-up
We consider the near-contact hydrodynamics of two spherical particles of radius
 $a$
, whose surfaces are decorated with small roughness asperities (bumps); see figure 1(a). The particle surfaces are separated by a nominal `macroscopic’ gap
$a$
, whose surfaces are decorated with small roughness asperities (bumps); see figure 1(a). The particle surfaces are separated by a nominal `macroscopic’ gap
 $D$
, while the `microscopic’ gap
$D$
, while the `microscopic’ gap
 $d$
– defined as the minimum separation between the asperities – can be much smaller. Hydrodynamic features are highly localised to the small gaps between opposing asperities, so we focus on a single pair of asperities (one per particle). The bumps are treated as spherical caps with amplitude
$d$
– defined as the minimum separation between the asperities – can be much smaller. Hydrodynamic features are highly localised to the small gaps between opposing asperities, so we focus on a single pair of asperities (one per particle). The bumps are treated as spherical caps with amplitude
 $A$
, radial width
$A$
, radial width
 $w$
, a relative orientation angle
$w$
, a relative orientation angle
 $\phi$
, and a centre-to-centre distance
$\phi$
, and a centre-to-centre distance
 $s$
in the plane of the gap. The amplitude is small relative to the particle radius, but can be comparable to the gap
$s$
in the plane of the gap. The amplitude is small relative to the particle radius, but can be comparable to the gap
 $D$
.
$D$
.
(a) Two spherical particles of radius
 $a$
, with asperities of width
$a$
, with asperities of width
 $w$
and amplitude
$w$
and amplitude
 $A$
, rotate and translate relative to each other. The microscale separation
$A$
, rotate and translate relative to each other. The microscale separation
 $d$
between asperities can be much smaller than the nominal separation
$d$
between asperities can be much smaller than the nominal separation
 $D$
between the particles, leading to singular hydrodynamic forces in the approach to contact. (b) Pressure profile in the gap at
$D$
between the particles, leading to singular hydrodynamic forces in the approach to contact. (b) Pressure profile in the gap at
 $y=0$
, showing a sharp spike as the bumps approach contact (decreasing
$y=0$
, showing a sharp spike as the bumps approach contact (decreasing
 $\mathcal{S}$
).
$\mathcal{S}$
).

We allow the top particle (particle 1) to translate with velocity
 $V \boldsymbol{e}_x$
and rotate with angular velocity
$V \boldsymbol{e}_x$
and rotate with angular velocity
 $\varOmega \boldsymbol{e}_y$
, while keeping the lower particle (particle 2) fixed; more general kinematics will be treated elsewhere. We consider small gaps and gentle bump profiles, i.e.
$\varOmega \boldsymbol{e}_y$
, while keeping the lower particle (particle 2) fixed; more general kinematics will be treated elsewhere. We consider small gaps and gentle bump profiles, i.e.
 $D \ll a$
and
$D \ll a$
and
 $A \ll w$
, providing necessary and sufficient conditions for lubrication theory, but will place no restriction on
$A \ll w$
, providing necessary and sufficient conditions for lubrication theory, but will place no restriction on
 $A/D$
. Under these geometric conditions, all spherical surfaces can be approximated as paraboloidal. Thus, the rough-particle surfaces are encoded by
$A/D$
. Under these geometric conditions, all spherical surfaces can be approximated as paraboloidal. Thus, the rough-particle surfaces are encoded by
 $z = h_{1, 2}(\boldsymbol{x})$
, defined in (A1), where
$z = h_{1, 2}(\boldsymbol{x})$
, defined in (A1), where
 $\boldsymbol{x} = (x,y)$
represents locations in the plane of the gap; see figure 1(a).
$\boldsymbol{x} = (x,y)$
represents locations in the plane of the gap; see figure 1(a).
Rather than follow the trajectory of the asperities through time, we characterise the system in configuration space. Defining the gap profile
 $h(\boldsymbol{x}) = h_1(\boldsymbol{x}) - h_2(\boldsymbol{x})$
and twice the mean gap surface
$h(\boldsymbol{x}) = h_1(\boldsymbol{x}) - h_2(\boldsymbol{x})$
and twice the mean gap surface
 $\overline {h}(\boldsymbol{x})=h_1(\boldsymbol{x})+h_2(\boldsymbol{x})$
, the pressure
$\overline {h}(\boldsymbol{x})=h_1(\boldsymbol{x})+h_2(\boldsymbol{x})$
, the pressure
 $p(\boldsymbol{x})$
is governed by the Reynolds equation (see Appendix A):
$p(\boldsymbol{x})$
is governed by the Reynolds equation (see Appendix A):
 \begin{align} \boldsymbol{\nabla }&\boldsymbol{\cdot }\left [\frac {h^3}{12\mu }\boldsymbol{\nabla }p+\frac {\overline {h}}{2}\left (V-a \varOmega \right )\boldsymbol{e}_x\right ] +\varOmega x=0, \end{align}
\begin{align} \boldsymbol{\nabla }&\boldsymbol{\cdot }\left [\frac {h^3}{12\mu }\boldsymbol{\nabla }p+\frac {\overline {h}}{2}\left (V-a \varOmega \right )\boldsymbol{e}_x\right ] +\varOmega x=0, \end{align}
where
 $\mu$
is the viscosity of the fluid and
$\mu$
is the viscosity of the fluid and
 $\boldsymbol{\nabla}$
is the gradient in the
$\boldsymbol{\nabla}$
is the gradient in the
 $xy$
-plane. We non-dimensionalise by scales characteristic of the smooth limit: distances across the gap by
$xy$
-plane. We non-dimensionalise by scales characteristic of the smooth limit: distances across the gap by
 $D$
, horizontal distances by
$D$
, horizontal distances by
 $L = \sqrt {2 a D}$
, and the pressure by
$L = \sqrt {2 a D}$
, and the pressure by
 $p_c = \mu VL/D^2$
. The rescaled problem involves the dimensionless amplitude
$p_c = \mu VL/D^2$
. The rescaled problem involves the dimensionless amplitude
 $\mathcal{A} = A/D$
and width
$\mathcal{A} = A/D$
and width
 $\mathcal{W} = w/L$
of the asperities, their relative in-plane orientation
$\mathcal{W} = w/L$
of the asperities, their relative in-plane orientation
 $\phi$
and separation
$\phi$
and separation
 $\mathcal{S} = s/L$
, which together set the dimensionless gap
$\mathcal{S} = s/L$
, which together set the dimensionless gap
 $\delta = d/D$
. We numerically solve the rescaled form of (2.1) for the pressure distribution, and then integrate the stresses of the flow to obtain forces and torques exerted by the flow on the particles (see Appendix B).
$\delta = d/D$
. We numerically solve the rescaled form of (2.1) for the pressure distribution, and then integrate the stresses of the flow to obtain forces and torques exerted by the flow on the particles (see Appendix B).
To aid the discussion, we temporarily suppress rotation and focus on bumps oriented head-on (
 $\phi = 0$
); both constraints will be relaxed later. We first discuss the horizontal force
$\phi = 0$
); both constraints will be relaxed later. We first discuss the horizontal force
 $F_x$
, which we decompose into a combination of smooth
$F_x$
, which we decompose into a combination of smooth
 $ F_{x,S}$
and rough
$ F_{x,S}$
and rough
 $F_{x,R} = F_x - F_{x,S}$
contributions. Including Stokes drag, the smooth contribution is (Jeffrey & Onishi Reference Jeffrey and Onishi1984)
$F_{x,R} = F_x - F_{x,S}$
contributions. Including Stokes drag, the smooth contribution is (Jeffrey & Onishi Reference Jeffrey and Onishi1984)
 \begin{align} F_{x, S} \approx 6\pi F_c \left [\frac {1}{6} \log \left (\frac {a}{D}\right ) + 1\right ]\!, \end{align}
\begin{align} F_{x, S} \approx 6\pi F_c \left [\frac {1}{6} \log \left (\frac {a}{D}\right ) + 1\right ]\!, \end{align}
where
 $F_c = \mu a V$
is the characteristic force scale on the particle. The logarithmic term is due to smooth-particle lubrication and depends only weakly on the gap (i.e. it is only approximately as large as Stokes drag even for
$F_c = \mu a V$
is the characteristic force scale on the particle. The logarithmic term is due to smooth-particle lubrication and depends only weakly on the gap (i.e. it is only approximately as large as Stokes drag even for
 $D/a$
as small as
$D/a$
as small as
 $10^{-3}$
). The rough contribution to the force, which is our focus, depends on the inter-bump separation
$10^{-3}$
). The rough contribution to the force, which is our focus, depends on the inter-bump separation
 $\delta$
, which we control by varying the in-plane separation
$\delta$
, which we control by varying the in-plane separation
 $\mathcal{S}$
between the bumps. The bump on particle 1 is centred for simplicity, but this is non-essential for our discussion.
$\mathcal{S}$
between the bumps. The bump on particle 1 is centred for simplicity, but this is non-essential for our discussion.
From numerical solutions, we find that the pressure is highly localised in the gap between the asperities (figure 1
b). It is also much greater than the scale expected for smooth spheres. The pressure grows in magnitude and becomes further localised as the bumps are brought closer together by decreasing
 $\mathcal{S}$
, which decreases the gap width
$\mathcal{S}$
, which decreases the gap width
 $\delta$
.
$\delta$
.
Dimensionless horizontal force (rough contribution) versus gap height
 $\delta$
for a pair of opposing asperities. The force
$\delta$
for a pair of opposing asperities. The force
 $F_{x, R}$
scales as
$F_{x, R}$
scales as
 $\delta ^{-1}$
for
$\delta ^{-1}$
for
 $\mathcal{A} \gt 1/2$
, and exceeds the smooth contribution (shaded region). Results are given at (a) fixed
$\mathcal{A} \gt 1/2$
, and exceeds the smooth contribution (shaded region). Results are given at (a) fixed
 $\mathcal{W}=1/5$
for a range of
$\mathcal{W}=1/5$
for a range of
 $\mathcal{A}$
, (b) fixed
$\mathcal{A}$
, (b) fixed
 $\mathcal{A}=0.6$
for a range of
$\mathcal{A}=0.6$
for a range of
 $\mathcal{W}$
. The force increases with both
$\mathcal{W}$
. The force increases with both
 $\mathcal{A}$
and
$\mathcal{A}$
and
 $\mathcal{W}$
.
$\mathcal{W}$
.

These localised pressure features correlate with increased horizontal forces, unlike for smooth particles where the horizontal force is largely caused by shear. Increasing either the amplitude or width of the asperities increases
 $F_{x,R}$
(figure 2). When
$F_{x,R}$
(figure 2). When
 $\mathcal{A} \lt 0.5$
(or
$\mathcal{A} \lt 0.5$
(or
 $A \lt D/2$
, cf. figure 1
a), all horizontal positions
$A \lt D/2$
, cf. figure 1
a), all horizontal positions
 $\mathcal{S}$
are accessible, and the rough contribution to the force remains negligible relative to the smooth case (figure 2
a). This behaviour changes qualitatively as soon as
$\mathcal{S}$
are accessible, and the rough contribution to the force remains negligible relative to the smooth case (figure 2
a). This behaviour changes qualitatively as soon as
 $\mathcal{A}$
exceeds
$\mathcal{A}$
exceeds
 $0.5$
. Now, each asperity occupies more than half the nominal gap width, restricting the available configuration space (limiting the range of
$0.5$
. Now, each asperity occupies more than half the nominal gap width, restricting the available configuration space (limiting the range of
 $\mathcal{S}$
). The asperities are now in a state of impending contact under a tangential sliding of the particles (figure 1
a). In this regime,
$\mathcal{S}$
). The asperities are now in a state of impending contact under a tangential sliding of the particles (figure 1
a). In this regime,
 $\delta$
approaches zero as the bumps come horizontally closer, leading to a sharp increase in force. Even for a single pair of asperities, this rough hydrodynamic force can overwhelm the smooth-sphere sliding lubrication force (shaded regions in figure 2). The numerical results suggest that the force diverges as a power-law
$\delta$
approaches zero as the bumps come horizontally closer, leading to a sharp increase in force. Even for a single pair of asperities, this rough hydrodynamic force can overwhelm the smooth-sphere sliding lubrication force (shaded regions in figure 2). The numerical results suggest that the force diverges as a power-law
 $\delta ^{-1}$
, which lies in stark contrast with the much weaker (logarithmic) smooth contribution. This scaling is consistent with a squeeze flow between the asperities due to tangential sliding of the particles, suggested in previous work (Wang et al. Reference Wang, Jamali and Brady2020). It is therefore of interest to understand how the prefactors of this scaling behaviour depend on the geometry of the particles and the asperities.
$\delta ^{-1}$
, which lies in stark contrast with the much weaker (logarithmic) smooth contribution. This scaling is consistent with a squeeze flow between the asperities due to tangential sliding of the particles, suggested in previous work (Wang et al. Reference Wang, Jamali and Brady2020). It is therefore of interest to understand how the prefactors of this scaling behaviour depend on the geometry of the particles and the asperities.
3. Theory
To understand the numerical results we zoom into a `local’ region characterising the gap between the asperities (see the side view of figure 1
a). In this region, the asperities themselves appear as spheres of radius
 $b= a \kappa /(1 + \kappa )$
, separated by a gap
$b= a \kappa /(1 + \kappa )$
, separated by a gap
 $d$
, where
$d$
, where
 $\kappa = w^2/(2Aa) = \mathcal{W}^2/\mathcal{A}$
is a measure of the bump’s curvature relative to that of the particle. The hydrodynamics of the inter-bump gap are governed by a horizontal length scale
$\kappa = w^2/(2Aa) = \mathcal{W}^2/\mathcal{A}$
is a measure of the bump’s curvature relative to that of the particle. The hydrodynamics of the inter-bump gap are governed by a horizontal length scale
 $\ell = \sqrt {2 b d} \propto w\sqrt {d/A}$
, which becomes much smaller than both
$\ell = \sqrt {2 b d} \propto w\sqrt {d/A}$
, which becomes much smaller than both
 $w$
and
$w$
and
 $L$
as the bumps approach contact. We exploit this separation of scales to isolate the bumps from the rest of the geometry, and invoke lubrication theory once more, this time in the thin film between the two spherical bump surfaces in relative translation. The force on bump 1 in the local configuration takes the form
$L$
as the bumps approach contact. We exploit this separation of scales to isolate the bumps from the rest of the geometry, and invoke lubrication theory once more, this time in the thin film between the two spherical bump surfaces in relative translation. The force on bump 1 in the local configuration takes the form
 \begin{align} \boldsymbol{F}=-\mu b \left [R_n\boldsymbol{p}\boldsymbol{p}+R_t\left (\boldsymbol{I}-\boldsymbol{p}\boldsymbol{p}\right )\right ]\boldsymbol{\cdot }(V \boldsymbol{e}_x), \end{align}
\begin{align} \boldsymbol{F}=-\mu b \left [R_n\boldsymbol{p}\boldsymbol{p}+R_t\left (\boldsymbol{I}-\boldsymbol{p}\boldsymbol{p}\right )\right ]\boldsymbol{\cdot }(V \boldsymbol{e}_x), \end{align}
where
 $R_n$
and
$R_n$
and
 $R_t$
are dimensionless resistance coefficients for normal and tangential motion between bumps, respectively,
$R_t$
are dimensionless resistance coefficients for normal and tangential motion between bumps, respectively,
 $\boldsymbol{I}$
is the identity matrix, and
$\boldsymbol{I}$
is the identity matrix, and
 $\boldsymbol{p} = \sin \theta \cos \phi \,\boldsymbol{e}_x+\sin \theta \sin \phi \,\boldsymbol{e}_y-\cos \theta \,\boldsymbol{e}_z$
is the unit vector which connects the centres of the two bumps and is normal to their surfaces (figure 1
a). Also,
$\boldsymbol{p} = \sin \theta \cos \phi \,\boldsymbol{e}_x+\sin \theta \sin \phi \,\boldsymbol{e}_y-\cos \theta \,\boldsymbol{e}_z$
is the unit vector which connects the centres of the two bumps and is normal to their surfaces (figure 1
a). Also,
 $\phi$
is the orientation angle introduced earlier, while
$\phi$
is the orientation angle introduced earlier, while
 $\theta$
is a polar angle that depends on the relative position of the bumps.
$\theta$
is a polar angle that depends on the relative position of the bumps.
When the distance between asperities is small (
 $d \ll b$
), the resistances are
$d \ll b$
), the resistances are
 \begin{align} R_n=\frac {3\pi }{2} \frac {b}{d}, \quad R_t=\frac {\pi }{2}\log \left (1+\frac {A}{d}\right )\!. \end{align}
\begin{align} R_n=\frac {3\pi }{2} \frac {b}{d}, \quad R_t=\frac {\pi }{2}\log \left (1+\frac {A}{d}\right )\!. \end{align}
The normal resistance
 $R_n$
is a well-known result (Cox Reference Cox1974), whereas the tangential resistance
$R_n$
is a well-known result (Cox Reference Cox1974), whereas the tangential resistance
 $R_t$
is slightly modified from the usual result as the outer cutoff of the logarithm is set by the bumps’ width
$R_t$
is slightly modified from the usual result as the outer cutoff of the logarithm is set by the bumps’ width
 $w$
rather than their radius of curvature
$w$
rather than their radius of curvature
 $b$
(Appendix C). Importantly,
$b$
(Appendix C). Importantly,
 $R_n$
scales as
$R_n$
scales as
 $d^{-1}$
and is associated with a squeeze flow between bumps, while
$d^{-1}$
and is associated with a squeeze flow between bumps, while
 $R_t$
, which is due to shear, grows weakly as
$R_t$
, which is due to shear, grows weakly as
 $\log d^{-1}$
.
$\log d^{-1}$
.
Substituting (3.2) into (3.1) leads to general expressions for the force components:
 \begin{align} F_{x,R} &=-\mu b V \big[(R_n-R_t)\sin ^2\theta \cos ^2\phi +R_t \big], \end{align}
\begin{align} F_{x,R} &=-\mu b V \big[(R_n-R_t)\sin ^2\theta \cos ^2\phi +R_t \big], \end{align}
 \begin{align} F_{y,R} &=-\mu b V(R_n-R_t)\sin ^2\theta \sin \phi \cos \phi , \end{align}
\begin{align} F_{y,R} &=-\mu b V(R_n-R_t)\sin ^2\theta \sin \phi \cos \phi , \end{align}
 \begin{align} F_{z,R} &=\mu b V(R_n-R_t)\sin \theta \cos \theta \cos \phi . \end{align}
\begin{align} F_{z,R} &=\mu b V(R_n-R_t)\sin \theta \cos \theta \cos \phi . \end{align}
The polar angle
 $\theta$
is a function of the microscopic geometry (
$\theta$
is a function of the microscopic geometry (
 $\mathcal{A}$
,
$\mathcal{A}$
,
 $\mathcal{W}$
and
$\mathcal{W}$
and
 $\mathcal{S}$
) and thus depends implicitly on
$\mathcal{S}$
) and thus depends implicitly on
 $\delta$
. Under a small-angle approximation consistent with the thin-film geometry, we find (Appendix A)
$\delta$
. Under a small-angle approximation consistent with the thin-film geometry, we find (Appendix A)
 \begin{align} \sin \theta \approx \sqrt {\frac {(2A-D+d)(1+\kappa )}{a \kappa (1+2\kappa ) }} . \end{align}
\begin{align} \sin \theta \approx \sqrt {\frac {(2A-D+d)(1+\kappa )}{a \kappa (1+2\kappa ) }} . \end{align}
Substituting this result into (3.3a ) yields
 \begin{align} F_{x,R} &= -\mu a V {\mathcal{K}} \left [\frac {3\pi }{2} \left (\frac {2 \mathcal{A} - 1}{\delta } + 1\right )\cos ^2\phi +R_t\right ]\!. \end{align}
\begin{align} F_{x,R} &= -\mu a V {\mathcal{K}} \left [\frac {3\pi }{2} \left (\frac {2 \mathcal{A} - 1}{\delta } + 1\right )\cos ^2\phi +R_t\right ]\!. \end{align}
Here, we have defined the dimensionless geometric quantity
 \begin{align} \mathcal{K} &= \frac {\kappa }{(1+\kappa )(1 + 2 \kappa )} = \frac {(b/a)(1 - b/a)}{(1 + b/a)}, \end{align}
\begin{align} \mathcal{K} &= \frac {\kappa }{(1+\kappa )(1 + 2 \kappa )} = \frac {(b/a)(1 - b/a)}{(1 + b/a)}, \end{align}
which depends on the ratio of the bump to the particle curvatures; note that
 ${\mathcal{K}} \sim \kappa = w^2/(2 A a)$
for small
${\mathcal{K}} \sim \kappa = w^2/(2 A a)$
for small
 $\kappa$
. The tangential rough contribution
$\kappa$
. The tangential rough contribution
 $R_t$
is much smaller than even the smooth case (Appendix C) so we neglect it for the remainder of the discussion.
$R_t$
is much smaller than even the smooth case (Appendix C) so we neglect it for the remainder of the discussion.
The analytic theory (3.5) fully reproduces the features of the numerical results in figure 2. When
 $\mathcal{A} \lt 1/2$
, the bumps can pass over each other, so the more singular
$\mathcal{A} \lt 1/2$
, the bumps can pass over each other, so the more singular
 $R_n$
contribution vanishes at closest approach (
$R_n$
contribution vanishes at closest approach (
 $\theta = 0$
, where
$\theta = 0$
, where
 $\delta = 1 - 2\mathcal{A}$
) and only the smaller logarithmic
$\delta = 1 - 2\mathcal{A}$
) and only the smaller logarithmic
 $R_t$
contribution survives. By contrast, when
$R_t$
contribution survives. By contrast, when
 $\mathcal{A}\gt 1/2$
each bump is taller than half the nominal gap width, so a sliding motion of the particles decreases their separation between their surfaces down to zero. That is, sliding motion of the particles for
$\mathcal{A}\gt 1/2$
each bump is taller than half the nominal gap width, so a sliding motion of the particles decreases their separation between their surfaces down to zero. That is, sliding motion of the particles for
 $\mathcal{A} \gt 1/2$
necessitates a squeeze flow between asperities, generating a
$\mathcal{A} \gt 1/2$
necessitates a squeeze flow between asperities, generating a
 $\delta ^{-1}$
hydrodynamic force that resists contact. Despite its small prefactor, the
$\delta ^{-1}$
hydrodynamic force that resists contact. Despite its small prefactor, the
 $\delta ^{-1}$
singularity from a single bump-pair quickly overwhelms the combined `smooth’ Stokes drag and lubrication forces on the rest of the sphere (shaded region in figure 2). An estimate of this crossover for typical experiments in made in § 5.
$\delta ^{-1}$
singularity from a single bump-pair quickly overwhelms the combined `smooth’ Stokes drag and lubrication forces on the rest of the sphere (shaded region in figure 2). An estimate of this crossover for typical experiments in made in § 5.
Horizontal force
 $F_{x,R}$
rescaled by the theoretically predicted scale
$F_{x,R}$
rescaled by the theoretically predicted scale
 $F_c \mathcal{K} (2 \mathcal{A} - 1)$
, plotted against
$F_c \mathcal{K} (2 \mathcal{A} - 1)$
, plotted against
 $\delta$
. Symbols are data from figure 2, which collapse into the theoretical prediction
$\delta$
. Symbols are data from figure 2, which collapse into the theoretical prediction
 $3\pi /(2\delta)$
for small
$3\pi /(2\delta)$
for small
 $\delta$
(solid line) for all
$\delta$
(solid line) for all
 $\mathcal{A}$
and
$\mathcal{A}$
and
 $\mathcal{W}$
, without fitting parameters. The collapse persists for larger
$\mathcal{W}$
, without fitting parameters. The collapse persists for larger
 $\delta$
, and is captured by adding a subdominant empirical constant
$\delta$
, and is captured by adding a subdominant empirical constant
 $c = 15$
to the theoretical prediction (dashed curve).
$c = 15$
to the theoretical prediction (dashed curve).

We quantitatively test the theory in the singular regime
 $\mathcal{A} \gt 1/2$
. As the bumps approach contact, (3.5) reduces to
$\mathcal{A} \gt 1/2$
. As the bumps approach contact, (3.5) reduces to
 \begin{align} F_{x,R} \sim - F_c \frac {3\pi {\mathcal{K}}}{2} \frac {(2\mathcal{A}-1)}{\delta } \cos ^2\phi , \quad \mathcal{A}\gt 1/2. \end{align}
\begin{align} F_{x,R} \sim - F_c \frac {3\pi {\mathcal{K}}}{2} \frac {(2\mathcal{A}-1)}{\delta } \cos ^2\phi , \quad \mathcal{A}\gt 1/2. \end{align}
We use this result to rescale the numerical results of figure 2 by the scaling factor
 $(2 \mathcal{A} - 1) {\mathcal{K}}$
. The rescaled data collapse onto the theoretical prediction
$(2 \mathcal{A} - 1) {\mathcal{K}}$
. The rescaled data collapse onto the theoretical prediction
 $3\pi /(2\delta)$
for small
$3\pi /(2\delta)$
for small
 $\delta$
, without adjustable parameters (figure 3). Unexpectedly, this collapse persists even when
$\delta$
, without adjustable parameters (figure 3). Unexpectedly, this collapse persists even when
 $\delta$
is not small, and is described rather well by a universal curve
$\delta$
is not small, and is described rather well by a universal curve
 $-(3 \pi /(2 \delta) + c)$
, where we find the subdominant term
$-(3 \pi /(2 \delta) + c)$
, where we find the subdominant term
 $c \approx 15$
from a fit.
$c \approx 15$
from a fit.
Thus, the introduction of roughness with small but finite amplitude
 $A$
such that
$A$
such that
 $D/2 \leqslant A \ll a$
leads to a singular perturbation of the hydrodynamic resistance. While the smooth contribution scales as
$D/2 \leqslant A \ll a$
leads to a singular perturbation of the hydrodynamic resistance. While the smooth contribution scales as
 $\log (\delta ^{-1})$
, the rough contribution scales more singularly as
$\log (\delta ^{-1})$
, the rough contribution scales more singularly as
 $\delta ^{-1}$
, albeit with a prefactor that is smaller by a factor of
$\delta ^{-1}$
, albeit with a prefactor that is smaller by a factor of
 $(b/a)$
. The rough contribution is essentially `switched on’ when
$(b/a)$
. The rough contribution is essentially `switched on’ when
 $A \gt D/2$
(
$A \gt D/2$
(
 $\mathcal{A} \gt 1/2$
), which is the regime of impending contact between asperities under a sliding of the particles. This threshold is observed clearly in the numerical results, and emerges naturally in the theory. In a situation with multiple bumps, the threshold
$\mathcal{A} \gt 1/2$
), which is the regime of impending contact between asperities under a sliding of the particles. This threshold is observed clearly in the numerical results, and emerges naturally in the theory. In a situation with multiple bumps, the threshold
 $A \gt D/2$
corresponds to configurations where particles can interlock, which has been identified as important to DST in past work (Hsu et al. Reference Hsu, Ramakrishna, Zanini, Spencer and Isa2018). However, while the interactions of interlocking particles are normally thought to be driven by contact friction, we see that similar interactions can arise due to hydrodynamics alone in the approach to contact. This can occur only when both surfaces are rough; if one of the surfaces is smooth, only the subdominant
$A \gt D/2$
corresponds to configurations where particles can interlock, which has been identified as important to DST in past work (Hsu et al. Reference Hsu, Ramakrishna, Zanini, Spencer and Isa2018). However, while the interactions of interlocking particles are normally thought to be driven by contact friction, we see that similar interactions can arise due to hydrodynamics alone in the approach to contact. This can occur only when both surfaces are rough; if one of the surfaces is smooth, only the subdominant
 $R_t$
term survives since there is no geometric mechanism to generate a squeeze flow. We refer the reader to Yariv et al. (Reference Yariv, Brandão, Wood, Szafraniec, Higgins, Bazazi, Pearce and Stone2024) for a two-dimensional analogue with a single rough surface, and Kargar-Estahbanati & Rallabandi (Reference Kargar-Estahbanati and Rallabandi2025) for a treatment that also includes elastic deformation.
$R_t$
term survives since there is no geometric mechanism to generate a squeeze flow. We refer the reader to Yariv et al. (Reference Yariv, Brandão, Wood, Szafraniec, Higgins, Bazazi, Pearce and Stone2024) for a two-dimensional analogue with a single rough surface, and Kargar-Estahbanati & Rallabandi (Reference Kargar-Estahbanati and Rallabandi2025) for a treatment that also includes elastic deformation.
The theory provides a natural framework for arbitrary orientations
 $\phi$
between asperities. The predicted
$\phi$
between asperities. The predicted
 $\phi$
dependences in (3.3) are confirmed by our numerical solutions (Appendix C). At fixed
$\phi$
dependences in (3.3) are confirmed by our numerical solutions (Appendix C). At fixed
 $\phi$
, all three force components depend on
$\phi$
, all three force components depend on
 $R_n$
, diverging as
$R_n$
, diverging as
 $\delta ^{-1}$
for
$\delta ^{-1}$
for
 $\mathcal{A} \gt 1/2$
. However, not all three components are equally important on average. Any physically realisable system of rough particles will involve an ensemble of pairwise bump interactions with different orientations at any instant of time. If bumps are distributed isotropically on the particles, all orientations
$\mathcal{A} \gt 1/2$
. However, not all three components are equally important on average. Any physically realisable system of rough particles will involve an ensemble of pairwise bump interactions with different orientations at any instant of time. If bumps are distributed isotropically on the particles, all orientations
 $\phi \in [0, 2\pi )$
are realised with equal probability. Then, averaging (3.3) over
$\phi \in [0, 2\pi )$
are realised with equal probability. Then, averaging (3.3) over
 $\phi$
leads to the average force per pair of opposing bumps,
$\phi$
leads to the average force per pair of opposing bumps,
 \begin{align} \langle F_{x,R} \rangle =- F_c \frac {3\pi {\mathcal{K}}}{4} \frac {(2\mathcal{A}-1)}{\delta }, \quad \langle F_{y,R} \rangle = \langle F_{z,R} \rangle =0, \end{align}
\begin{align} \langle F_{x,R} \rangle =- F_c \frac {3\pi {\mathcal{K}}}{4} \frac {(2\mathcal{A}-1)}{\delta }, \quad \langle F_{y,R} \rangle = \langle F_{z,R} \rangle =0, \end{align}
valid for
 $\mathcal{A} \gt 1/2$
(observe that the average force is half of the maximum). Forces in the direction of motion (
$\mathcal{A} \gt 1/2$
(observe that the average force is half of the maximum). Forces in the direction of motion (
 $x$
) survive the averaging since
$x$
) survive the averaging since
 $F_x$
always opposes particle motion regardless of orientation, while the other components average out to zero, due to orientational symmetry at the asperity scale. Thus, the configurational averaging retrieves the macroscopic Stokesian symmetry of the two-sphere system. We note that different averages may be more or less appropriate depending on the constraints of the problem (e.g. prescribed force versus prescribed motion). We expect different averaging methods to lead to similar results up to
$F_x$
always opposes particle motion regardless of orientation, while the other components average out to zero, due to orientational symmetry at the asperity scale. Thus, the configurational averaging retrieves the macroscopic Stokesian symmetry of the two-sphere system. We note that different averages may be more or less appropriate depending on the constraints of the problem (e.g. prescribed force versus prescribed motion). We expect different averaging methods to lead to similar results up to
 $O(1)$
prefactors.
$O(1)$
prefactors.
4. Coupling of rotation and translation
We now generalise to include rotation
 $\varOmega \boldsymbol{e}_y$
in addition to translation
$\varOmega \boldsymbol{e}_y$
in addition to translation
 $V \boldsymbol{e}_x$
, focusing on how these degrees of freedom are coupled by roughness. We also keep track of the torque on the particle, only the
$V \boldsymbol{e}_x$
, focusing on how these degrees of freedom are coupled by roughness. We also keep track of the torque on the particle, only the
 $y$
-component of which (
$y$
-component of which (
 $T_y$
) is relevant in the average sense for isotropically distributed roughness. For the same reason, we neglect vertical translation, which will not, on average, couple to horizontal translation or rotation due to symmetry. Under this configurationally averaged setting, the mobility relation connecting a tangential force and torque due to tangential sliding and rotation of particle 1 is
$T_y$
) is relevant in the average sense for isotropically distributed roughness. For the same reason, we neglect vertical translation, which will not, on average, couple to horizontal translation or rotation due to symmetry. Under this configurationally averaged setting, the mobility relation connecting a tangential force and torque due to tangential sliding and rotation of particle 1 is
 \begin{align} \begin{bmatrix} F_x \\ T_y \\ \end{bmatrix} = -\mu a \begin{bmatrix} \mathcal{R}_{F V} & a \mathcal{R}_{F \varOmega } \\ a \mathcal{R}_{T V} & a^2 \mathcal{R}_{T \varOmega } \\ \end{bmatrix} \boldsymbol{\cdot }\begin{bmatrix} V \\ \varOmega \\ \end{bmatrix}\!, \end{align}
\begin{align} \begin{bmatrix} F_x \\ T_y \\ \end{bmatrix} = -\mu a \begin{bmatrix} \mathcal{R}_{F V} & a \mathcal{R}_{F \varOmega } \\ a \mathcal{R}_{T V} & a^2 \mathcal{R}_{T \varOmega } \\ \end{bmatrix} \boldsymbol{\cdot }\begin{bmatrix} V \\ \varOmega \\ \end{bmatrix}\!, \end{align}
where the
 $\mathcal{R}_{ij}$
are dimensionless resistance coefficients (note that
$\mathcal{R}_{ij}$
are dimensionless resistance coefficients (note that
 $\mathcal{R}_{F\varOmega } = \mathcal{R}_{TV}$
due to symmetry).
$\mathcal{R}_{F\varOmega } = \mathcal{R}_{TV}$
due to symmetry).
The
 $\mathcal{R}_{FV}$
coefficient relates the force to the particle velocity, and is identical to the quantity
$\mathcal{R}_{FV}$
coefficient relates the force to the particle velocity, and is identical to the quantity
 $F_{x,R}/F_c$
in figures 2 and 3, where we had set
$F_{x,R}/F_c$
in figures 2 and 3, where we had set
 $\varOmega = 0$
. To understand the rough contributions to the other coefficients we revisit the local theory. Including particle rotation merely modifies the approach velocity of the asperities in (3.1) from
$\varOmega = 0$
. To understand the rough contributions to the other coefficients we revisit the local theory. Including particle rotation merely modifies the approach velocity of the asperities in (3.1) from
 $V \boldsymbol{e}_x$
to
$V \boldsymbol{e}_x$
to
 $(V - a \varOmega ) \boldsymbol{e}_x$
, which carries through to all subsequent theoretical results for the force. The rough contribution to the torque on particle 1 is
$(V - a \varOmega ) \boldsymbol{e}_x$
, which carries through to all subsequent theoretical results for the force. The rough contribution to the torque on particle 1 is
 $\boldsymbol{T}_R = \int \boldsymbol{r} \times \boldsymbol{n} \boldsymbol{\cdot }\boldsymbol{\sigma }_R \text{d}S$
, where
$\boldsymbol{T}_R = \int \boldsymbol{r} \times \boldsymbol{n} \boldsymbol{\cdot }\boldsymbol{\sigma }_R \text{d}S$
, where
 $\boldsymbol{\sigma }_R$
is the stress due to roughness,
$\boldsymbol{\sigma }_R$
is the stress due to roughness,
 $\boldsymbol{n}$
is the normal vector, and
$\boldsymbol{n}$
is the normal vector, and
 $\boldsymbol{r}$
is the moment arm connecting the centre of the particle to a point on its surface S. As shown in figure 1(b) and predicted by the theory, stresses are localised to a small region of length
$\boldsymbol{r}$
is the moment arm connecting the centre of the particle to a point on its surface S. As shown in figure 1(b) and predicted by the theory, stresses are localised to a small region of length
 $\ell \ll L$
surrounding the minimum separation of the bumps. Within this region, the moment arm is effectively the constant vector
$\ell \ll L$
surrounding the minimum separation of the bumps. Within this region, the moment arm is effectively the constant vector
 $\boldsymbol{r}_c$
connecting the centre of particle 1 to the point of minimum separation. The torque is therefore
$\boldsymbol{r}_c$
connecting the centre of particle 1 to the point of minimum separation. The torque is therefore
 $\boldsymbol{T}_R \approx \boldsymbol{r}_c \times \boldsymbol{F}_R$
, where
$\boldsymbol{T}_R \approx \boldsymbol{r}_c \times \boldsymbol{F}_R$
, where
 $\boldsymbol{F}_R = \int \boldsymbol{n} \boldsymbol{\cdot }\boldsymbol{\sigma }_R \text{d}S$
is the rough contribution to the force discussed previously. This cross product does not vanish even though
$\boldsymbol{F}_R = \int \boldsymbol{n} \boldsymbol{\cdot }\boldsymbol{\sigma }_R \text{d}S$
is the rough contribution to the force discussed previously. This cross product does not vanish even though
 $\boldsymbol{F}_R$
is largely a normal force (directed along
$\boldsymbol{F}_R$
is largely a normal force (directed along
 $\boldsymbol{p}$
) since
$\boldsymbol{p}$
) since
 $\boldsymbol{p}$
is misaligned with the moment arm
$\boldsymbol{p}$
is misaligned with the moment arm
 $\boldsymbol{r}_c$
(this is not the case for smooth spheres). Then, the torque on the particle is simply a consequence of the rough force acting at an effective point of contact. We thus conclude that all four resistance coefficients are identical up to sign:
$\boldsymbol{r}_c$
(this is not the case for smooth spheres). Then, the torque on the particle is simply a consequence of the rough force acting at an effective point of contact. We thus conclude that all four resistance coefficients are identical up to sign:
 \begin{align} \mathcal{R}_{FV} &= -\mathcal{R}_{F\varOmega } = -\mathcal{R}_{TV} = \mathcal{R}_{T\varOmega } = \frac {3 \pi {\mathcal{K}}}{2} \frac {(2 \mathcal{A} - 1)}{\delta } \cos ^2\phi , \quad (\mathcal{A} \gt 1/2). \end{align}
\begin{align} \mathcal{R}_{FV} &= -\mathcal{R}_{F\varOmega } = -\mathcal{R}_{TV} = \mathcal{R}_{T\varOmega } = \frac {3 \pi {\mathcal{K}}}{2} \frac {(2 \mathcal{A} - 1)}{\delta } \cos ^2\phi , \quad (\mathcal{A} \gt 1/2). \end{align}
(a) Resistance coefficient
 $\mathcal{R}_{TV}$
(showing rough contributions only) versus
$\mathcal{R}_{TV}$
(showing rough contributions only) versus
 $\delta$
, for fixed
$\delta$
, for fixed
 $\mathcal{W}=1/5$
and various
$\mathcal{W}=1/5$
and various
 $\mathcal{A}$
. The data are virtually identical to those in figure 2(a). Shaded region indicates a typical range for smooth particles for
$\mathcal{A}$
. The data are virtually identical to those in figure 2(a). Shaded region indicates a typical range for smooth particles for
 $D/a \in (10^{-3}, 10^{-1})$
. (b) Ratio of resistance coefficients
$D/a \in (10^{-3}, 10^{-1})$
. (b) Ratio of resistance coefficients
 $\mathcal{R}_{TV}/\mathcal{R}_{T \varOmega } = a \varOmega /V$
versus
$\mathcal{R}_{TV}/\mathcal{R}_{T \varOmega } = a \varOmega /V$
versus
 $\delta$
. For all
$\delta$
. For all
 $\mathcal{A}$
and all
$\mathcal{A}$
and all
 $\delta$
, the ratio is always close to 1, indicating strong rotation–translation coupling.
$\delta$
, the ratio is always close to 1, indicating strong rotation–translation coupling.

Our numerical calculations quantitatively corroborate these predictions. The torque due to translation,
 $\mathcal{R}_{TV}$
, is virtually identical to
$\mathcal{R}_{TV}$
, is virtually identical to
 $\mathcal{R}_{FV}$
(compare figure 4
a with figure 2
a), diverging as
$\mathcal{R}_{FV}$
(compare figure 4
a with figure 2
a), diverging as
 $\delta ^{-1}$
for
$\delta ^{-1}$
for
 $\mathcal{A}\gt 1/2$
and exceeding the torque on a smooth particle. If particle 1 is torque-free, its rotation and translation are coupled according to
$\mathcal{A}\gt 1/2$
and exceeding the torque on a smooth particle. If particle 1 is torque-free, its rotation and translation are coupled according to
 \begin{align} \frac {\varOmega a}{V}=-\frac {\mathcal{R}_{T V}}{\mathcal{R}_{T \varOmega }}. \end{align}
\begin{align} \frac {\varOmega a}{V}=-\frac {\mathcal{R}_{T V}}{\mathcal{R}_{T \varOmega }}. \end{align}
For small gaps, the torque from roughness dominates that from the rest of the two-particle geometry, and this ratio approaches unity according to the theory (4.2), corresponding to
 $\varOmega a/V \approx 1$
. This prediction is in agreement with the numerical results (figure 4
b), and corresponds precisely to vanishing relative surface velocity
$\varOmega a/V \approx 1$
. This prediction is in agreement with the numerical results (figure 4
b), and corresponds precisely to vanishing relative surface velocity
 $V - a \varOmega$
. This hydrodynamic ‘pure-rolling’ condition recovers the kinematic constraint of classical dry rolling friction. It is interesting to note that the rolling condition persists across the range of
$V - a \varOmega$
. This hydrodynamic ‘pure-rolling’ condition recovers the kinematic constraint of classical dry rolling friction. It is interesting to note that the rolling condition persists across the range of
 $\delta$
, even when the resistance coefficients are not particularly large (note the short range of the vertical axis in figure 4
b). This is due primarily to the localisation of the force on the sub-asperity scale, which allows it to behave similarly to a point-like contact force. We contrast this with the case of smooth particles, where the coupling is negligible (Cox Reference Cox1974; Hsiao et al. Reference Hsiao, Saha-Dalal, Larson and Solomon2017b
), i.e. torque-free smooth particles experience a very weak (logarithmic) coupling that decays rapidly with
$\delta$
, even when the resistance coefficients are not particularly large (note the short range of the vertical axis in figure 4
b). This is due primarily to the localisation of the force on the sub-asperity scale, which allows it to behave similarly to a point-like contact force. We contrast this with the case of smooth particles, where the coupling is negligible (Cox Reference Cox1974; Hsiao et al. Reference Hsiao, Saha-Dalal, Larson and Solomon2017b
), i.e. torque-free smooth particles experience a very weak (logarithmic) coupling that decays rapidly with
 $D$
. The roughness-induced torque dominates over the smooth contribution close to contact (i.e. when
$D$
. The roughness-induced torque dominates over the smooth contribution close to contact (i.e. when
 $A \gt D/2$
), and so we expect rotation and translation to be strongly coupled in this regime. This coupling is insensitive to the geometric details of the roughness, and stems from the generation of large forces and localisation of the stresses on sub-asperity length scales in the interlocking regime.
$A \gt D/2$
), and so we expect rotation and translation to be strongly coupled in this regime. This coupling is insensitive to the geometric details of the roughness, and stems from the generation of large forces and localisation of the stresses on sub-asperity length scales in the interlocking regime.
The constraining of rotational modes to translational ones has been identified as a central piece in the rheology of dense suspensions. Past work has interpreted it as a kinematic constraint that occurs on contact, akin to the rotation of interlocked gears (see e.g. Singh et al. Reference Singh, Ness, Seto, de Pablo and Jaeger2020). The present work provides an alternative interpretation of this feature. If the particles did not roll when slid against each other, there would be relative motion between asperities in near-contact. This would generate squeeze flows, producing
 $d^{-1}$
singular forces and torques. The need to relieve this impending hydrodynamic singularity as asperities approach (or pull apart) underpins the hydrodynamic interpretation of the rolling constraint.
$d^{-1}$
singular forces and torques. The need to relieve this impending hydrodynamic singularity as asperities approach (or pull apart) underpins the hydrodynamic interpretation of the rolling constraint.
5. Discussion and conclusions
We have shown that local hydrodynamic interactions between asperities lead generically to a strong singular behaviour of tangential forces and torques on rough particles near contact. From (3.8) to (4.2), the configurationally averaged rough contribution to the force,
 $\langle F_{x,R}\rangle$
, and torque,
$\langle F_{x,R}\rangle$
, and torque,
 $\langle T_{y,R}\rangle$
,
$\langle T_{y,R}\rangle$
,
 \begin{align} \langle F_{x,R} \rangle = - a^{-1} \langle T_{y,R} \rangle = - 6 \pi \mu a (V - a \varOmega ) \frac {(b/a)}{8} \frac {(2A - D)}{d}. \end{align}
\begin{align} \langle F_{x,R} \rangle = - a^{-1} \langle T_{y,R} \rangle = - 6 \pi \mu a (V - a \varOmega ) \frac {(b/a)}{8} \frac {(2A - D)}{d}. \end{align}
Even for a single pair of bumps, these forces can exceed hydrodynamic forces between smooth particles, and occur when the nominal separation between particles falls below twice the roughness amplitude. On the scale of the particles, the roughness-induced hydrodynamic features manifest as localised forces that act at an effective point of contact. These point-like forces generate torque, which also greatly exceeds its smooth counterpart. Together, these large forces and torques tightly constrain rotation to translation.
From (5.1), we see that the mean rough force contribution exceeds the smooth one (assuming
 $D = O(A)$
), when
$D = O(A)$
), when
 $d \gtrsim A (b/a)/8$
. For a typical experiment with colloidal particles of radius
$d \gtrsim A (b/a)/8$
. For a typical experiment with colloidal particles of radius
 $a = 1\, {\unicode{x03BC}}\mathrm{m}$
and asperities with
$a = 1\, {\unicode{x03BC}}\mathrm{m}$
and asperities with
 $A \sim b = 100\, \mathrm{nm}$
, the rough force from a single pair of asperities becomes comparable to Stokes drag when the separation
$A \sim b = 100\, \mathrm{nm}$
, the rough force from a single pair of asperities becomes comparable to Stokes drag when the separation
 $d \lesssim 15\, \mathrm{nm}$
. The same force, relative to Stokes drag, would be generated for somewhat larger
$d \lesssim 15\, \mathrm{nm}$
. The same force, relative to Stokes drag, would be generated for somewhat larger
 $d$
for realistic micron-sized particles, which have multiple asperities covering their surface. By contrast, the contribution from classical (smooth) lubrication (2.2) is only approximately
$d$
for realistic micron-sized particles, which have multiple asperities covering their surface. By contrast, the contribution from classical (smooth) lubrication (2.2) is only approximately
 $40\,\%$
of Stokes drag for the same parameters. For larger particles or larger asperities, the rough contribution would exceed the smooth one for proportionately greater
$40\,\%$
of Stokes drag for the same parameters. For larger particles or larger asperities, the rough contribution would exceed the smooth one for proportionately greater
 $d$
. The coupling between rotation and translation, which stems from the localisation of stresses at the asperity scale, would likely persist for even greater
$d$
. The coupling between rotation and translation, which stems from the localisation of stresses at the asperity scale, would likely persist for even greater
 $d$
, as is suggested by figure 4(b).
$d$
, as is suggested by figure 4(b).
The present theory is agnostic to the length scale of the particles or the asperities, provided that continuum hydrodynamics and low-Reynolds-number conditions apply. The continuum approximation remains valid as long as the Knudsen number
 $Kn=\lambda /d$
is small, where
$Kn=\lambda /d$
is small, where
 $\lambda$
is the mean free path of the fluid molecules. In the case of rough micron-sized particles described earlier (with
$\lambda$
is the mean free path of the fluid molecules. In the case of rough micron-sized particles described earlier (with
 $d \sim 15\, \mathrm{nm}$
, for which the rough force is comparable to Stokes drag), and assuming mean free path
$d \sim 15\, \mathrm{nm}$
, for which the rough force is comparable to Stokes drag), and assuming mean free path
 $\lambda \sim 0.1\, \mathrm{nm}$
typical of liquids, the Knudsen number is
$\lambda \sim 0.1\, \mathrm{nm}$
typical of liquids, the Knudsen number is
 $Kn \lesssim 0.01$
. We therefore expect the present continuum theory to apply to typical colloidal suspensions used in experiments. The restrictions on
$Kn \lesssim 0.01$
. We therefore expect the present continuum theory to apply to typical colloidal suspensions used in experiments. The restrictions on
 $\delta$
are weaker for larger particles or asperities.
$\delta$
are weaker for larger particles or asperities.
On the one hand, the forces discussed here share many similarities with frictional contact forces: they are point-like, and occur below a threshold separation of the order of the roughness amplitude. Macroscopically, this threshold can be viewed as an effective contact distance at which these forces become `activated’. On the other hand, they are purely hydrodynamic and scale with particle velocity, becoming singular as the inverse of the microscopic surface separation distance
 $d$
. These hydrodynamic forces and torques occur precisely to avoid an impending hard contact between asperities. Thus, rough hydrodynamic forces form a bridge between smooth hydrodynamic interactions and frictional contact forces. It is interesting to observe that the present hydrodynamic forces are kinematically reversible at the asperity scale. By contrast, contact-based forces are not reversible beyond molecular length scales (separating asperities does not lead to a contact force). The implications of this asperity-scale reversibility on the motion of particles with a distribution of surface asperities remains to be explored.
$d$
. These hydrodynamic forces and torques occur precisely to avoid an impending hard contact between asperities. Thus, rough hydrodynamic forces form a bridge between smooth hydrodynamic interactions and frictional contact forces. It is interesting to observe that the present hydrodynamic forces are kinematically reversible at the asperity scale. By contrast, contact-based forces are not reversible beyond molecular length scales (separating asperities does not lead to a contact force). The implications of this asperity-scale reversibility on the motion of particles with a distribution of surface asperities remains to be explored.
For nanoscopic gaps, it may also be necessary to account for other kinds of surface forces, e.g. Derjaguin-Landau-Verwey-Overbeek or van der Waals forces, which could ultimately drive particles to physical contact. It may also be important to consider the effects of compressibility, piezo-viscosity or non-continuum effects in nanometric gaps. While the present theory is expected to become quantitatively modified in situations where these effects are important, the qualitative features identified here should remain applicable. That is, the need to squeeze fluid out from between approaching roughness asperities would lead to significant resistance to particle motion.
Our findings thus form a fundamental hydrodynamic basis for near-contact interactions in suspensions of rough particles. Roughness produces a singular perturbation to classical lubrication theory, leading to large hydrodynamic resistances in near-contact configurations. These modified resistances would be important – and relatively straightforward – to include in simulations of dense suspension flows. The same principles would apply to other lubricated systems involving rough surfaces, including those with engineered surface textures in tribological, biological and robotic applications.
Acknowledgements
The authors thank A. Greaney, H. Stone and E. Yariv for insightful conversations.
Funding
J.M. acknowledges support from the US Department of Education through award P200A210080.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Geometry and lubrication equation
We consider two particles with a single asperity each. Under a long-wave theory consistent with lubrication flow, the spheres and bumps are approximated as paraboloids. We thus define the surfaces of the particles by
 \begin{align} z &= h_1(\boldsymbol{x})=D+\frac {|\boldsymbol{x}|^2}{2a}-\beta _1(\boldsymbol{x}), \end{align}
\begin{align} z &= h_1(\boldsymbol{x})=D+\frac {|\boldsymbol{x}|^2}{2a}-\beta _1(\boldsymbol{x}), \end{align}
 \begin{align} z &= h_2(\boldsymbol{x})=-\frac {|\boldsymbol{x}|^2}{2a}+\beta _2(\boldsymbol{x}). \end{align}
\begin{align} z &= h_2(\boldsymbol{x})=-\frac {|\boldsymbol{x}|^2}{2a}+\beta _2(\boldsymbol{x}). \end{align}
The functions
 $\beta _i(\boldsymbol{x})$
define the bumps according to
$\beta _i(\boldsymbol{x})$
define the bumps according to
 \begin{align} \beta _i(\boldsymbol{x})=\left \{ \begin{array}{ccc} \displaystyle A\left (1-\frac {|\boldsymbol{x} - \boldsymbol{s}_i|^2}{w^2}\right ) & \mbox{for} & |\boldsymbol{x} - \boldsymbol{s}_i|\leqslant w, \\[10pt] 0 & \mbox{for} & |\boldsymbol{x} - \boldsymbol{s}_i|\gt w, \end{array} \right . \end{align}
\begin{align} \beta _i(\boldsymbol{x})=\left \{ \begin{array}{ccc} \displaystyle A\left (1-\frac {|\boldsymbol{x} - \boldsymbol{s}_i|^2}{w^2}\right ) & \mbox{for} & |\boldsymbol{x} - \boldsymbol{s}_i|\leqslant w, \\[10pt] 0 & \mbox{for} & |\boldsymbol{x} - \boldsymbol{s}_i|\gt w, \end{array} \right . \end{align}
where
 $\boldsymbol{s}_i$
are the locations of the bumps in the
$\boldsymbol{s}_i$
are the locations of the bumps in the
 $xy$
-plane. We choose
$xy$
-plane. We choose
 $\boldsymbol{s}_1 = \boldsymbol{0}$
and
$\boldsymbol{s}_1 = \boldsymbol{0}$
and
 $\boldsymbol{s}_2 = s (\cos \phi \,\boldsymbol{e}_x + \sin \phi \, \boldsymbol{e}_y )$
.
$\boldsymbol{s}_2 = s (\cos \phi \,\boldsymbol{e}_x + \sin \phi \, \boldsymbol{e}_y )$
.
Particle 1 translates with velocity
 $V \boldsymbol{e}_x$
and rotates with angular velocity
$V \boldsymbol{e}_x$
and rotates with angular velocity
 $\varOmega \boldsymbol{e}_y$
, while particle 2 is stationary. We split the velocity
$\varOmega \boldsymbol{e}_y$
, while particle 2 is stationary. We split the velocity
 $\boldsymbol{v}$
into an in-plane component
$\boldsymbol{v}$
into an in-plane component
 $\boldsymbol{u}$
and an out-of-plane component
$\boldsymbol{u}$
and an out-of-plane component
 $v_z$
, writing
$v_z$
, writing
 $\boldsymbol{v} = \boldsymbol{u} + v_z \boldsymbol{e}_z$
. Under the usual lubrication approximation, the in-plane velocity is
$\boldsymbol{v} = \boldsymbol{u} + v_z \boldsymbol{e}_z$
. Under the usual lubrication approximation, the in-plane velocity is
 \begin{align} \boldsymbol{u}=\frac {\boldsymbol{\nabla }p}{2\mu } (z-h_1(\boldsymbol{x}))(z-h_2(\boldsymbol{x}))+(V-a \varOmega ) \frac {z-h_2(\boldsymbol{x})}{h_1(\boldsymbol{x})-h_2(\boldsymbol{x})} \boldsymbol{e}_x. \end{align}
\begin{align} \boldsymbol{u}=\frac {\boldsymbol{\nabla }p}{2\mu } (z-h_1(\boldsymbol{x}))(z-h_2(\boldsymbol{x}))+(V-a \varOmega ) \frac {z-h_2(\boldsymbol{x})}{h_1(\boldsymbol{x})-h_2(\boldsymbol{x})} \boldsymbol{e}_x. \end{align}
Integrating the continuity equation (
 $\boldsymbol{\nabla }\boldsymbol{\cdot }\boldsymbol{u} +\partial_z v_z= 0$
) over the gap yields (2.1).
$\boldsymbol{\nabla }\boldsymbol{\cdot }\boldsymbol{u} +\partial_z v_z= 0$
) over the gap yields (2.1).
To relate the polar angle
 $\theta$
to the separation
$\theta$
to the separation
 $d$
, which enters (3.3), we analyse the near-contact geometry. Without loss of generality, we orient the bumps along
$d$
, which enters (3.3), we analyse the near-contact geometry. Without loss of generality, we orient the bumps along
 $x$
and set
$x$
and set
 $y = 0$
(
$y = 0$
(
 $\phi = 0$
). Setting
$\phi = 0$
). Setting
 $\partial h/\partial x = 0$
identifies the location of minimum separation as
$\partial h/\partial x = 0$
identifies the location of minimum separation as
 $x_m=s/[2(1+\kappa )]$
. The minimum separation distance is then
$x_m=s/[2(1+\kappa )]$
. The minimum separation distance is then
 $d = h(x_m)$
, which we rearrange to obtain the
$d = h(x_m)$
, which we rearrange to obtain the
 $s$
at minimum separation:
$s$
at minimum separation:
 $s=2\sqrt {\kappa (1+\kappa )(2A-D+d)a/{(1+2\kappa )}}$
. Finally, we approximate
$s=2\sqrt {\kappa (1+\kappa )(2A-D+d)a/{(1+2\kappa )}}$
. Finally, we approximate
 $\sin \theta =\partial h_1/\partial x|_{x_m} =\partial h_2/\partial x|_{x_m}$
to arrive at (3.4).
$\sin \theta =\partial h_1/\partial x|_{x_m} =\partial h_2/\partial x|_{x_m}$
to arrive at (3.4).
Appendix B. Numerical methods
We use two nested grids to solve the problem, one localised near the point of closest approach, encompassing the bumps, and another that includes a larger portion of the particles beyond the bumps (the global grid). The global (local) grids are defined on a square of side
 $L_g$
(
$L_g$
(
 $L_l$
), each with
$L_l$
), each with
 $n + 1$
grid points along a dimension. We set
$n + 1$
grid points along a dimension. We set
 $L_g = 20$
throughout. To resolve the full bump structure, we target
$L_g = 20$
throughout. To resolve the full bump structure, we target
 $L_f = 4 \mathcal{W}$
and round up to the nearest integer multiple of a global grid cell (whose side has length
$L_f = 4 \mathcal{W}$
and round up to the nearest integer multiple of a global grid cell (whose side has length
 $L_g/n$
). The local grid is therefore defined within the bounds of the global grid and resolves the solution on the scale of the asperities.
$L_g/n$
). The local grid is therefore defined within the bounds of the global grid and resolves the solution on the scale of the asperities.
We non-dimensionalise (2.1) and discretise it using central finite differences on both grids. We solve the discretised system numerically on both grids for pressure using a Gauss–Seidel iteration with multi-grid acceleration (Press Reference Press2007, p. 1066). Let us denote the boundary of the local grid by
 $B$
. We first relax the problem by a step on the global grid, fixing the pressure data at
$B$
. We first relax the problem by a step on the global grid, fixing the pressure data at
 $B$
. During this global iteration we `mask’ the region enclosed by
$B$
. During this global iteration we `mask’ the region enclosed by
 $B$
(which is occupied by the local grid) to avoid solving the problem there. Then, we relax the solution on the local grid by a step, utilising the pressure gradient from the coarse iteration as a boundary condition on
$B$
(which is occupied by the local grid) to avoid solving the problem there. Then, we relax the solution on the local grid by a step, utilising the pressure gradient from the coarse iteration as a boundary condition on
 $B$
. Iterating back and forth between the two grids achieves convergence while guaranteeing continuity of the pressure and its gradient; continuity of second-order derivatives is enforced by (2.1). This method allows us to simultaneously resolve the rapid pressure variations between the bumps and the global lubrication problem at reduced computational effort. The effects of the bumps decay rapidly away from the point of minimum separation where the gap widens. We therefore use the smooth-sphere solution to enforce boundary conditions at the edge of the computational domain, greatly suppressing domain-size effects in the computation. For the particular kinematics considered here, the smooth-sphere pressure is identically zero.
$B$
. Iterating back and forth between the two grids achieves convergence while guaranteeing continuity of the pressure and its gradient; continuity of second-order derivatives is enforced by (2.1). This method allows us to simultaneously resolve the rapid pressure variations between the bumps and the global lubrication problem at reduced computational effort. The effects of the bumps decay rapidly away from the point of minimum separation where the gap widens. We therefore use the smooth-sphere solution to enforce boundary conditions at the edge of the computational domain, greatly suppressing domain-size effects in the computation. For the particular kinematics considered here, the smooth-sphere pressure is identically zero.
To compute the rough contribution to the forces, we split the corresponding integrals by adding and subtracting the tractions for the smooth problem. For example, the horizontal force
 $F_x = \int _S \sigma _{nx}\, \text{d}S$
(here,
$F_x = \int _S \sigma _{nx}\, \text{d}S$
(here,
 $\sigma _{nx}$
is the
$\sigma _{nx}$
is the
 $x$
-component of the surface traction and
$x$
-component of the surface traction and
 $\text{d}S$
is the elemental area in the gap) is split as
$\text{d}S$
is the elemental area in the gap) is split as
 \begin{align} F_x = \underbrace {\int _S \sigma _{nx}^{S}\, \text{d}S}_{F_{x,S}} + \underbrace {\int _S \big(\sigma _{nx} - \sigma _{nx}^{S}\big)\, \text{d}S}_{F_{x,R}}. \end{align}
\begin{align} F_x = \underbrace {\int _S \sigma _{nx}^{S}\, \text{d}S}_{F_{x,S}} + \underbrace {\int _S \big(\sigma _{nx} - \sigma _{nx}^{S}\big)\, \text{d}S}_{F_{x,R}}. \end{align}
The superscript
 $S$
indicates the smooth contribution, and is known analytically (Jeffrey & Onishi Reference Jeffrey and Onishi1984). The first integral is the known smooth contribution to the force, while the second is the rough contribution and is calculated numerically. The rough integrand is localised around the origin, so the integral converges rapidly independent of domain size. The results of a grid-independence study for two different
$S$
indicates the smooth contribution, and is known analytically (Jeffrey & Onishi Reference Jeffrey and Onishi1984). The first integral is the known smooth contribution to the force, while the second is the rough contribution and is calculated numerically. The rough integrand is localised around the origin, so the integral converges rapidly independent of domain size. The results of a grid-independence study for two different
 $\delta$
are shown in table 1. We typically use
$\delta$
are shown in table 1. We typically use
 $n = 2^9$
for the results reported in the main text.
$n = 2^9$
for the results reported in the main text.
Grid-independence study: computed value of the rescaled horizontal force
 $F_{x, R}/F_c$
for different grid resolutions
$F_{x, R}/F_c$
for different grid resolutions
 $n$
and two different
$n$
and two different
 $\delta$
for the non-rotating case with
$\delta$
for the non-rotating case with
 $\mathcal{A} = 0.6$
,
$\mathcal{A} = 0.6$
,
 $\mathcal{W} = 0.1$
.
$\mathcal{W} = 0.1$
.

Appendix C. Resistance coefficients
C.1. Tangential resistance
To compute
 $R_t$
, we consider the local flow between tangentially translating bumps. The pressure in this configuration is identically zero. Using dimensional quantities for clarity, the traction on particle 1 in the direction of motion is due to shear and is given by
$R_t$
, we consider the local flow between tangentially translating bumps. The pressure in this configuration is identically zero. Using dimensional quantities for clarity, the traction on particle 1 in the direction of motion is due to shear and is given by
 $-\mu V/h$
, where
$-\mu V/h$
, where
 $h = d + |\tilde {\boldsymbol{x}}|^2/b$
is the gap between two bumps, where
$h = d + |\tilde {\boldsymbol{x}}|^2/b$
is the gap between two bumps, where
 $\tilde {\boldsymbol{x}}$
is a local coordinate vector in the gap centred at the point of minimum separation. Integrating over the local plane of the gap and comparing with (3.2) gives
$\tilde {\boldsymbol{x}}$
is a local coordinate vector in the gap centred at the point of minimum separation. Integrating over the local plane of the gap and comparing with (3.2) gives
 $R_t= \pi \log (1+ r^2_\infty /(b d) ) + c_1$
,
$R_t= \pi \log (1+ r^2_\infty /(b d) ) + c_1$
,
 $r_{\infty }$
being an outer radial cutoff distance and
$r_{\infty }$
being an outer radial cutoff distance and
 $c_1$
being a constant that is independent of
$c_1$
being a constant that is independent of
 $d$
but possibly depending on other geometric quantities. While the outer cutoff for isolated spheres is their radius (Cox Reference Cox1974), the cutoff for the truncated bumps is of the order of their radial width
$d$
but possibly depending on other geometric quantities. While the outer cutoff for isolated spheres is their radius (Cox Reference Cox1974), the cutoff for the truncated bumps is of the order of their radial width
 $w$
. Noting that
$w$
. Noting that
 $b \sim \kappa a = w^2/(2A)$
, up to higher orders in
$b \sim \kappa a = w^2/(2A)$
, up to higher orders in
 $\kappa$
, we thus find
$\kappa$
, we thus find
 \begin{align} R_t= \pi \log \left (1+\frac {\mathcal{A}}{\delta }\right ) + c_1. \end{align}
\begin{align} R_t= \pi \log \left (1+\frac {\mathcal{A}}{\delta }\right ) + c_1. \end{align}
To test this prediction, we consider
 $\phi = \pi /2$
, where the force is given solely by
$\phi = \pi /2$
, where the force is given solely by
 $R_t$
; see (3.3). Numerical force calculations in this configuration agree very well with the analytic prediction without fitting parameters, up to the small additive matching constant
$R_t$
; see (3.3). Numerical force calculations in this configuration agree very well with the analytic prediction without fitting parameters, up to the small additive matching constant
 $c_1$
(figure 5). The
$c_1$
(figure 5). The
 $R_t$
contribution remains much smaller than the Stokes drag even for quite small
$R_t$
contribution remains much smaller than the Stokes drag even for quite small
 $\delta$
.
$\delta$
.
Dimensionless force along
 $x$
when
$x$
when
 $\phi =\pi /2$
from numerical calculations (symbols) plotted alongside analytic predictions (curves), which are due to tangential resistance
$\phi =\pi /2$
from numerical calculations (symbols) plotted alongside analytic predictions (curves), which are due to tangential resistance
 $R_t$
. The predictions are offset from the numerical by an
$R_t$
. The predictions are offset from the numerical by an
 $O(1)$
additive constant associated with the logarithm.
$O(1)$
additive constant associated with the logarithm.

C.2. Dependence on orientation
To test the
 $\phi$
-dependence of (3.3), we control the bump height and width as with the head-on (
$\phi$
-dependence of (3.3), we control the bump height and width as with the head-on (
 $\phi = 0$
) case, but vary the angle
$\phi = 0$
) case, but vary the angle
 $\phi$
at a fixed separation
$\phi$
at a fixed separation
 $\mathcal{S}$
(fixing
$\mathcal{S}$
(fixing
 $\delta$
). For
$\delta$
). For
 $\mathcal{A} \gt 1/2$
, (3.3) reduces to
$\mathcal{A} \gt 1/2$
, (3.3) reduces to
 \begin{align} F_{x,R}^{th}&= F_w\cos ^2\phi , \quad F_{y,R}^{th}= F_w \frac {\sin 2 \phi }{2} \quad \mbox{and}\quad F_{z,R}^{th} = F_v \cos \phi , \end{align}
\begin{align} F_{x,R}^{th}&= F_w\cos ^2\phi , \quad F_{y,R}^{th}= F_w \frac {\sin 2 \phi }{2} \quad \mbox{and}\quad F_{z,R}^{th} = F_v \cos \phi , \end{align}
where
 \begin{align} F_w = -F_c \frac {3\pi }{2}\frac {\kappa (2\mathcal{A}-1)}{(1+\kappa )(1+2\kappa )} \frac {1}{\delta } \quad \mbox{and}\quad F_v= \frac {\mu V L^3}{D^2} \left (\frac {\kappa }{2(1+\kappa )}\right )^{3/2}\left (\frac {2\mathcal{A}-1}{1+2\kappa }\right )^{1/2}\frac {1}{\delta }. \end{align}
\begin{align} F_w = -F_c \frac {3\pi }{2}\frac {\kappa (2\mathcal{A}-1)}{(1+\kappa )(1+2\kappa )} \frac {1}{\delta } \quad \mbox{and}\quad F_v= \frac {\mu V L^3}{D^2} \left (\frac {\kappa }{2(1+\kappa )}\right )^{3/2}\left (\frac {2\mathcal{A}-1}{1+2\kappa }\right )^{1/2}\frac {1}{\delta }. \end{align}
Rescaling
 $F_x$
and
$F_x$
and
 $F_y$
by
$F_y$
by
 $F_w$
, and
$F_w$
, and
 $F_z$
by
$F_z$
by
 $F_v$
, we plot the numerical results against the analytic prediction of (C2) in figure 6, finding agreement at small
$F_v$
, we plot the numerical results against the analytic prediction of (C2) in figure 6, finding agreement at small
 $\delta$
without fit parameters. Note that
$\delta$
without fit parameters. Note that
 $F_x$
curves are offset from the prediction due to
$F_x$
curves are offset from the prediction due to
 $R_t$
. The offset shrinks as
$R_t$
. The offset shrinks as
 $\delta \to 0$
.
$\delta \to 0$
.
Variation of rescaled forces with the inter-bump orientation
 $\phi$
at
$\phi$
at
 $\mathcal{A} = 0.6$
and
$\mathcal{A} = 0.6$
and
 $\mathcal{W} = 1/5$
for different
$\mathcal{W} = 1/5$
for different
 $\delta$
, showing (a)
$\delta$
, showing (a)
 $F_x/F_w$
, (b)
$F_x/F_w$
, (b)
 $F_y/F_w$
and (c)
$F_y/F_w$
and (c)
 $F_z/F_v$
. Analytic predictions from (C2) for small
$F_z/F_v$
. Analytic predictions from (C2) for small
 $\delta$
are indicated as black curves.
$\delta$
are indicated as black curves.









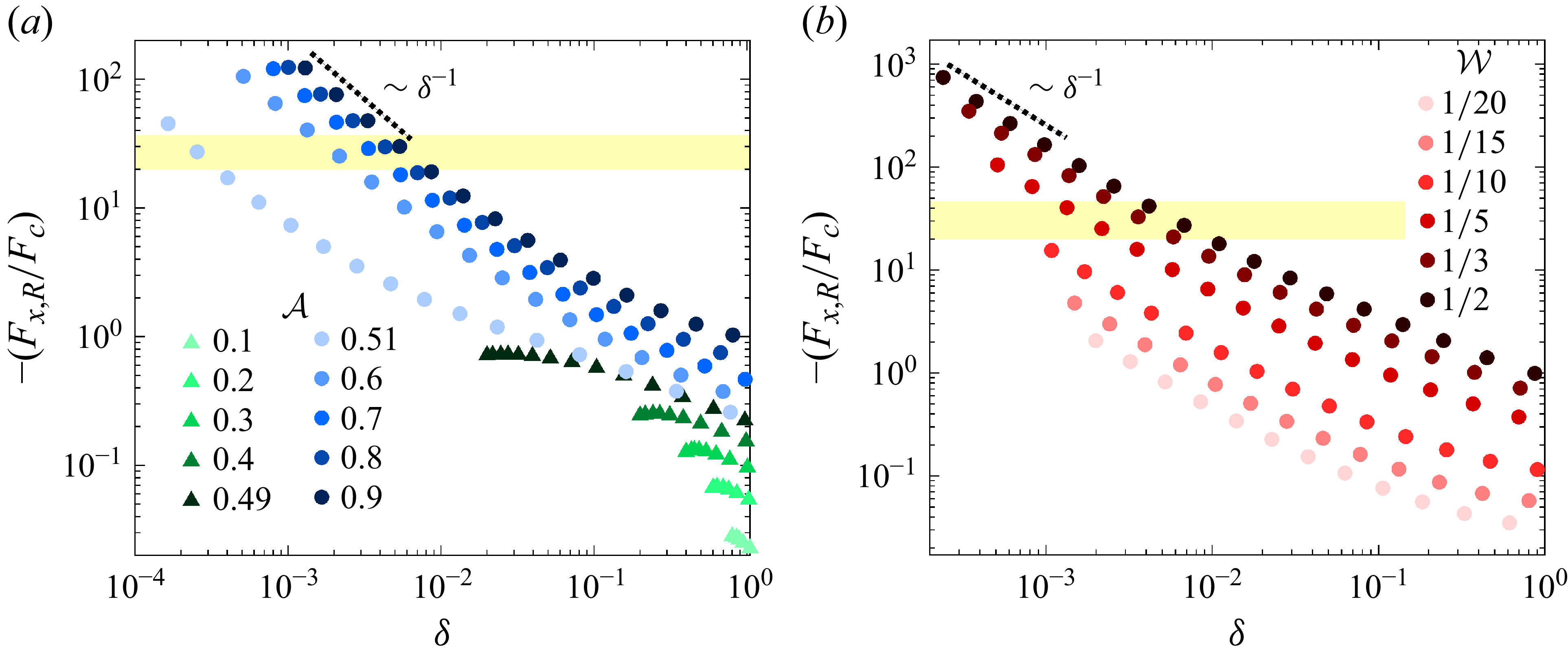




















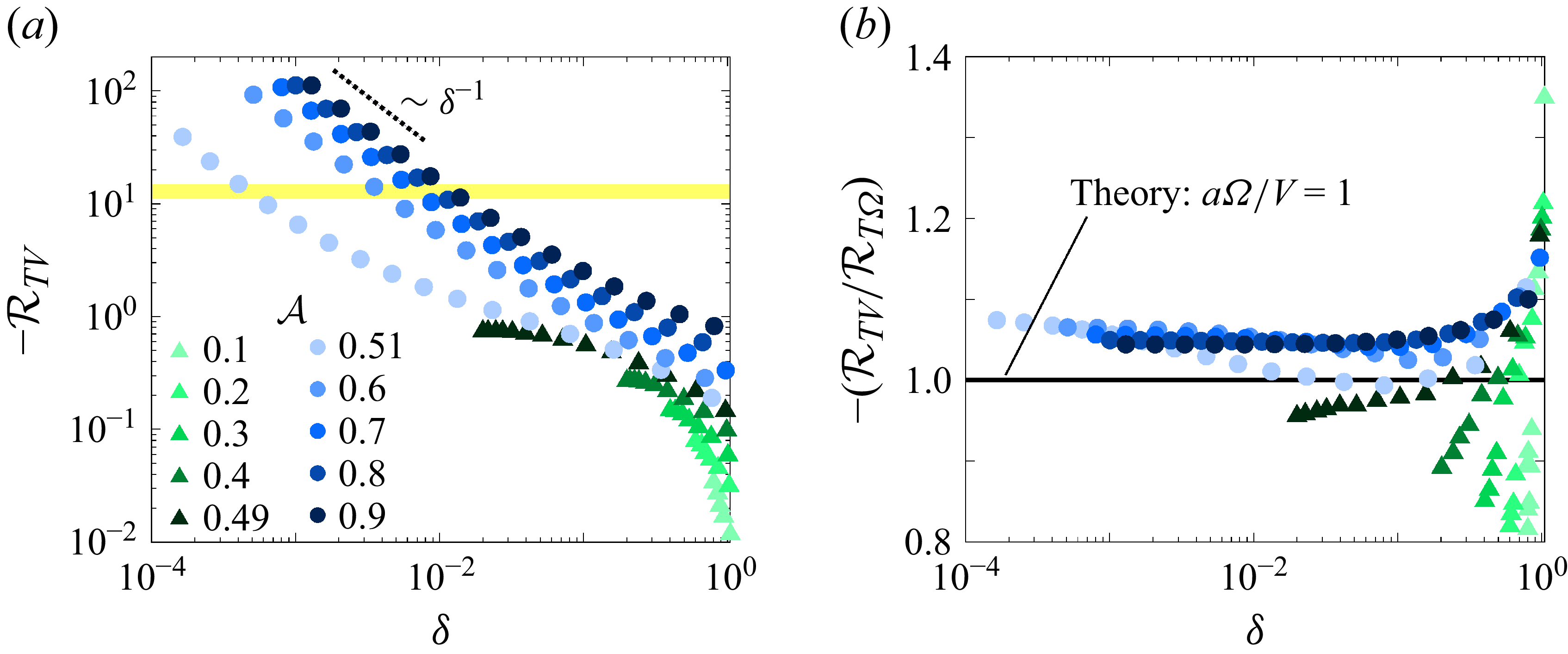















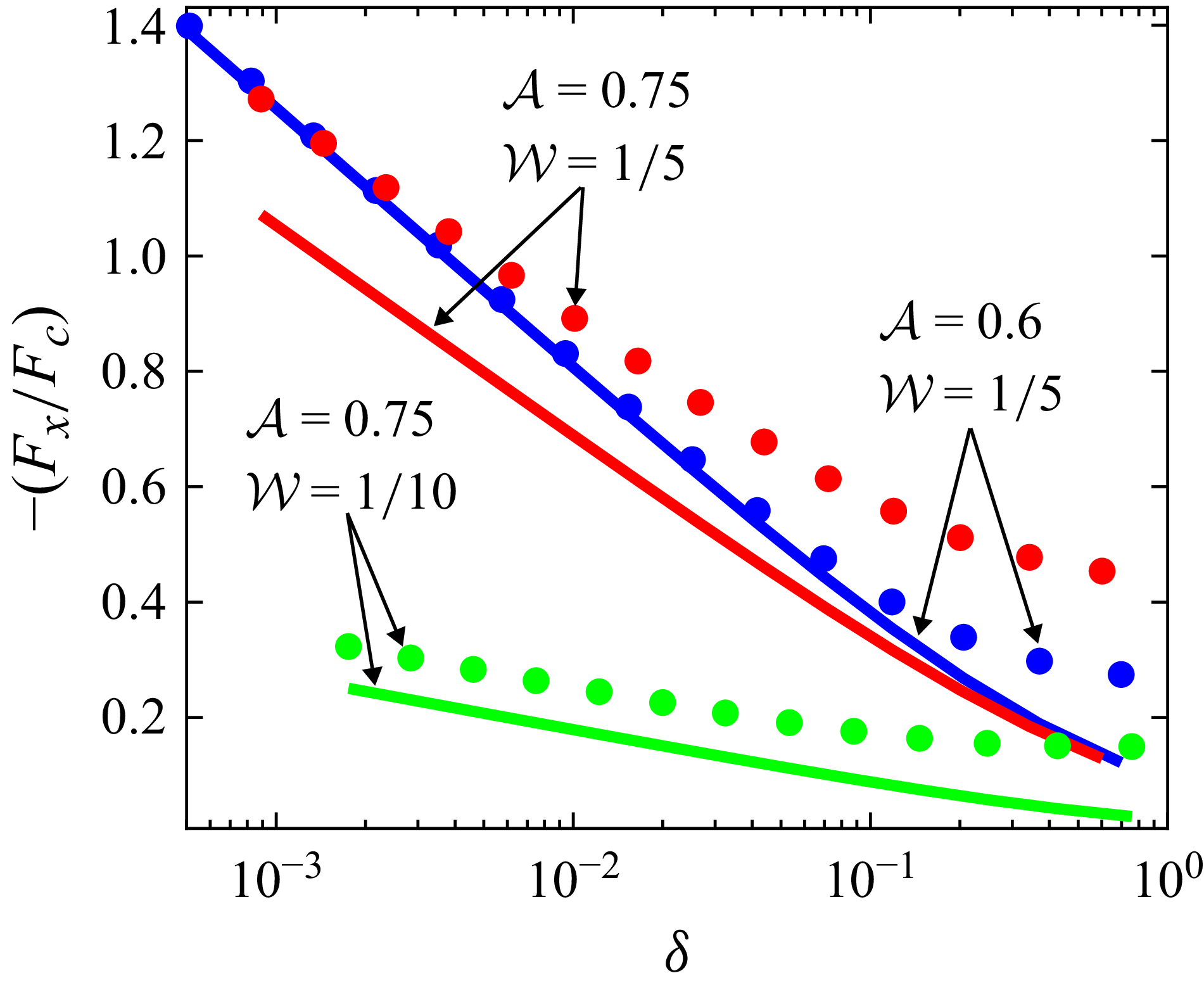














 Open access
Open access