


1. Introduction
1.1. Overview
Turbulence remains one of the last unsolved problems in classical physics. It arises when a fluid moves at high speeds or encounters obstacles, leading to the formation of eddies, vortices, and intense mixing. In general terms, turbulence refers to a complex and chaotic state of fluid motion characterised by irregular and unpredictable fluctuations in velocity and pressure.
A defining feature of turbulence is the energy cascade (see e.g. [Reference Frisch12], [Reference Kolmogorov21], [Reference Pope31], [Reference Richardson34]): kinetic energy – the energy of motion – is injected at large scales (e.g. by wind or a moving object) and transferred to progressively smaller scales through nonlinear interactions. At the smallest scales (the Kolmogorov scale), viscosity dissipates this energy as heat, completing the cascade. Understanding how turbulent eddies and mean-flow structures redistribute energy across different regions of the flow field is essential for characterising this cascade. The (instantaneous) advective (also called convective [Reference Kundu, Cohen and Dowling22]) kinetic energy flux [Reference Alexakis and Biferale1, Reference Landau and Lifshitz23, Reference Panton28, Reference Starr43, Reference White46] plays a crucial role in this process, as it represents the transport of kinetic energy by the bulk motion of the fluid – that is, it quantifies how much kinetic energy is carried as the fluid moves. Mathematically, it is expressed as uE, where u is the velocity field of the turbulent flow,
 $E = \tfrac{1}{2}\rho \lVert u \rVert^2$
is the kinetic energy per unit volume, and
$E = \tfrac{1}{2}\rho \lVert u \rVert^2$
is the kinetic energy per unit volume, and
 $\rho$
denotes the fluid density.
$\rho$
denotes the fluid density.
This study investigates the advective kinetic energy flux induced by a subclass of phenomenological stochastic models for spatial turbulent velocity fields, referred to as (spatial) ambit processes. More precisely, we analyse the divergence of a generalisation of the advective kinetic energy flux,
 ${\operatorname{div}} (uE)$
, through local limits of surface integrals over smooth manifolds for a subclass of vector-valued ambit fields. The analysis of this flux within velocity-field models serves to assess the mathematical consistency and limitations of such models, while also elucidating the conditions they must satisfy to reproduce salient features of turbulent flows. The principal focus, however, is mathematical in nature, as these limits constitute intrinsically significant objects of study. Broader modelling considerations and their implications are deferred to future work.
${\operatorname{div}} (uE)$
, through local limits of surface integrals over smooth manifolds for a subclass of vector-valued ambit fields. The analysis of this flux within velocity-field models serves to assess the mathematical consistency and limitations of such models, while also elucidating the conditions they must satisfy to reproduce salient features of turbulent flows. The principal focus, however, is mathematical in nature, as these limits constitute intrinsically significant objects of study. Broader modelling considerations and their implications are deferred to future work.
Ambit processes constitute a flexible class of phenomenological models for turbulence, capable of capturing diverse dynamical behaviours while retaining a strong theoretical foundation. They were originally introduced to model turbulent velocity fields [Reference Barndorff-Nielsen and Schmiegel3]. Formally, an ambit process is defined as a stochastic integral with respect to an independently scattered, infinitely divisible random measure. This construction provides a robust framework for representing spatio-temporal phenomena. Beyond turbulence, ambit processes have found applications in a variety of domains, including finance [Reference Barndorff-Nielsen, Benth and Veraart5, Reference Barndorff-Nielsen, Benth and Veraart6], tumour growth [Reference Barndorff-Nielsen and Schmiegel4, Reference Jensen, Jónsdóttir, Schmiegel and Barndorff-Nielsen18], and environmental sciences [Reference Nguyen and Veraart26, Reference Nguyen and Veraart27]. For a comprehensive account of ambit stochastics, we refer the reader to [Reference Barndorff-Nielsen, Benth and Veraart7].
1.2. Relation between local limits of a random field and its divergence
The divergence of a vector field quantifies the rate at which the field expands or contracts at a given point. Intuitively, it measures how much ‘stuff’ (such as fluid, heat, or energy) flows into or out of a small region. For
 $C^1$
vector fields, divergence is typically defined in terms of derivatives. However, this definition is not suitable for non-differentiable vector fields, including many examples of random fields.
$C^1$
vector fields, divergence is typically defined in terms of derivatives. However, this definition is not suitable for non-differentiable vector fields, including many examples of random fields.
An alternative definition, which exploits its interpretation as a rate of expansion, is given in terms of a limit of a surface integral. Namely, the divergence of a vector field
 $X\,\colon \mathbb{R}^d\rightarrow \mathbb{R}^d$
at the point
$X\,\colon \mathbb{R}^d\rightarrow \mathbb{R}^d$
at the point
 $\mathbf{p}\in\mathbb{R}^d$
can be defined as
$\mathbf{p}\in\mathbb{R}^d$
can be defined as
 \begin{align} \operatorname{div} X(\mathbf{p})= \lim_{V\rightarrow\{\mathbf{p}\}} \dfrac{1}{|V|} \int_{\partial V} X\cdot n_V \, \mathcal{H}^{d-1}( {{\mathrm{d}}} y), \end{align}
\begin{align} \operatorname{div} X(\mathbf{p})= \lim_{V\rightarrow\{\mathbf{p}\}} \dfrac{1}{|V|} \int_{\partial V} X\cdot n_V \, \mathcal{H}^{d-1}( {{\mathrm{d}}} y), \end{align}
where V is an arbitrary region containing
 $\mathbf{p}$
with a sufficiently regular boundary
$\mathbf{p}$
with a sufficiently regular boundary
 $\partial V$
,
$\partial V$
,
 $|V|$
denotes the Lebesgue measure of V, and
$|V|$
denotes the Lebesgue measure of V, and
 $n_V$
is the outward unit normal to
$n_V$
is the outward unit normal to
 $\partial V$
. The integral on the right-hand side represents the integral flux of X across
$\partial V$
. The integral on the right-hand side represents the integral flux of X across
 $\partial V$
. The limits considered in this study follow this approach. Specifically, we examine the asymptotic behaviour of functionals of the form (1.1) in the case where the vector field is governed by a subclass of ambit fields.
$\partial V$
. The limits considered in this study follow this approach. Specifically, we examine the asymptotic behaviour of functionals of the form (1.1) in the case where the vector field is governed by a subclass of ambit fields.
In turbulence, the divergence operator plays a crucial role in characterising the behaviour of fluids. For instance, when X denotes the velocity field of a turbulent flow, the condition
 $\operatorname{div} X = 0$
indicates mass conservation and implies that there is no net expansion or contraction of the fluid at any point. In the context of turbulent energy transfer, attention is often given to the divergence of the advective kinetic energy flux,
$\operatorname{div} X = 0$
indicates mass conservation and implies that there is no net expansion or contraction of the fluid at any point. In the context of turbulent energy transfer, attention is often given to the divergence of the advective kinetic energy flux,
 ${\operatorname{div}}(X E(X))$
, as defined above with
${\operatorname{div}}(X E(X))$
, as defined above with
 $u = X$
. This divergence quantifies how much kinetic energy is entering or leaving a small control volume due to advection. In other words, it represents the spatial redistribution of kinetic energy by the flow. In regions with strong shear or shock interactions, this term becomes particularly significant for understanding the transfer of energy across scales and its role in the turbulent energy cascade.
$u = X$
. This divergence quantifies how much kinetic energy is entering or leaving a small control volume due to advection. In other words, it represents the spatial redistribution of kinetic energy by the flow. In regions with strong shear or shock interactions, this term becomes particularly significant for understanding the transfer of energy across scales and its role in the turbulent energy cascade.
A possible approach to the phenomenological stochastic modelling of turbulence involves constructing velocity fields that reproduce key stylised features observed in physical quantities (see e.g. [Reference Hedevang and Schmiegel14], [Reference Robert and Vargas35]) – an area that remains the subject of active research. Among these stylised features, the advective kinetic energy flux and its divergence are known to exhibit scaling behaviour and non-Gaussian distributions with heavy tails, leading to strong spatial intermittency (see e.g. [Reference Alexakis and Biferale1], [Reference Coburn, Forman, Smith, Vasquez and Stawarz8], [Reference Ishihara, Gotoh and Kaneda16], [Reference Pope31], [Reference Wang, Wan, Chen and Chen45]). A plausible ambit model for turbulence should therefore be capable of reproducing at least some of these features. Among its potential applications is the modelling of atmospheric turbulence.
1.3. Main contributions of this article
We study the asymptotic behaviour under divergence-like limits for integral fluxes of infinitely divisible random fields of the form
 \begin{align*}X(p)=\int_{A+p} F(p,q) L({{\mathrm{d}}} q), \quad p\in\mathbb{R}^d,\end{align*}
\begin{align*}X(p)=\int_{A+p} F(p,q) L({{\mathrm{d}}} q), \quad p\in\mathbb{R}^d,\end{align*}
where L is a homogeneous Lévy basis (see the next section for more details), F is continuously differentiable, and A is compact. More precisely, we determine conditions for the convergence, as
 $r\downarrow 0$
, of normalised functionals of the form
$r\downarrow 0$
, of normalised functionals of the form
 \begin{align*}\mathscr{E}_{r}=\int_{S_r} \phi (X(y))\cdot u_{S_r}\,\mathcal{H}^{d-1}( {{\mathrm{d}}} y),\end{align*}
\begin{align*}\mathscr{E}_{r}=\int_{S_r} \phi (X(y))\cdot u_{S_r}\,\mathcal{H}^{d-1}( {{\mathrm{d}}} y),\end{align*}
where
 $S_r=rM+p_0$
is the boundary of a region
$S_r=rM+p_0$
is the boundary of a region
 $V_r=r\mathfrak{D}+p_0$
,
$V_r=r\mathfrak{D}+p_0$
,
 $\phi$
is a vector field with polynomial growth,
$\phi$
is a vector field with polynomial growth,
 $x \cdot y$
denotes the inner product of vectors x and y,
$x \cdot y$
denotes the inner product of vectors x and y,
 $u_{S_r}$
is the outward unit normal to
$u_{S_r}$
is the outward unit normal to
 $S_r$
, and
$S_r$
, and
 $\mathcal{H}^{d-1}$
denotes the
$\mathcal{H}^{d-1}$
denotes the
 $(d-1)$
-Hausdorff measure in
$(d-1)$
-Hausdorff measure in
 $\mathbb{R}^d$
. Notice that when X represents the velocity field of a fluid, the choice
$\mathbb{R}^d$
. Notice that when X represents the velocity field of a fluid, the choice
 $\phi(X) = \|X\|^2 X$
corresponds (up to a constant factor) to the advective kinetic energy flux.
$\phi(X) = \|X\|^2 X$
corresponds (up to a constant factor) to the advective kinetic energy flux.
It turns out that the rate of convergence of
 $\mathscr{E}_{r}$
strongly depends on whether or not L is of finite variation. In the latter case, our central assumption is that the law of the ‘small jumps’ of L belongs to the domain of attraction of an
$\mathscr{E}_{r}$
strongly depends on whether or not L is of finite variation. In the latter case, our central assumption is that the law of the ‘small jumps’ of L belongs to the domain of attraction of an
 $\alpha$
-stable distribution. In the finite-variation case, we further show that the kinetic energy flux converges in probability under the classical normalisation
$\alpha$
-stable distribution. In the finite-variation case, we further show that the kinetic energy flux converges in probability under the classical normalisation
 $|S_r|$
. In both settings, the limit processes can be expressed as stochastic integrals with respect to a Lévy basis over regions uniquely determined by the geometry of A. Finally, by considering
$|S_r|$
. In both settings, the limit processes can be expressed as stochastic integrals with respect to a Lévy basis over regions uniquely determined by the geometry of A. Finally, by considering
 $(\mathscr{E}_{tr})_{t\geq0}$
as a sequence of continuous-time stochastic processes, we show that the limiting process of such a sequence is not only self-similar but also absolutely continuous, regardless of whether L is of finite variation.
$(\mathscr{E}_{tr})_{t\geq0}$
as a sequence of continuous-time stochastic processes, we show that the limiting process of such a sequence is not only self-similar but also absolutely continuous, regardless of whether L is of finite variation.
To the best of our knowledge, this is the first study to establish asymptotic results for ambit processes in general dimensions where the limiting variable affects only the size of the ambit set. The geometric nature of this problem naturally calls for the use of geometric measure elements. A key contribution of this work is the development of techniques for proving these limit results, which crucially combine probability theory and geometric measure theory, particularly Steiner’s formula for gentle sets together with the Lévy–Khintchine formula. Our findings provide new insights into how the geometry of the ambit set influences the behaviour of this class of processes.
1.4. Related work
In terms of modelling turbulence, there is relevant literature related to the present work. Barndorff-Nielsen and Schmiegel [Reference Barndorff-Nielsen and Schmiegel3] introduced the class of ambit processes and proposed employing them to model the energy dissipation of a turbulent flow. The same authors [Reference Barndorff-Nielsen and Schmiegel4] were the first to explore the use of ambit processes in modelling turbulent velocity fields. In that study, they outlined several fundamental issues to be addressed for developing a comprehensive theory of ambit processes for turbulence. Hedevang and Schmiegel [Reference Hedevang and Schmiegel14] proposed specific ambit random fields capable of reproducing a given covariance structure. In particular, they showed that in the isotropic and incompressible case, the kernel can be expressed in terms of the energy spectrum; the models developed were applied to atmospheric boundary layer turbulence. Schmiegel [Reference Schmiegel42] discussed the use of ambit random fields for describing two-dimensional turbulence. In that work, the author presented the construction of two-dimensional homogeneous and isotropic ambit fields that are divergence-free but not invariant under the parity operation.
To the best of our knowledge, questions similar to those addressed in this work for ambit processes have been considered in only two manuscripts. Schmiegel [Reference Schmiegel42] studied two-dimensional divergence-free ambit stochastic vector fields. In a broader framework, Sauri [Reference Sauri41] examined the flux and circulation of a two-dimensional subclass of ambit random fields. That work determined local limits for these functionals under suitable normalisation. In most cases, they were shown to converge stably in distribution to stationary random fields expressed as line integrals of a Lévy basis over the boundary of the original underlying ambit set.
Other mathematical studies that consider similar functionals to those analysed here can be found in the theory of statistical mechanics and microstructures within continuum mechanics (e.g. [Reference Presutti32]). In that context, for instance, the macroscopic excess free energy is defined as a surface integral. Although some limiting behaviour is addressed in that theory, they do not examine the limits of functionals of random fields defined by integrals with respect to the Hausdorff measure, as we do here.
The paper is organised as follows. In Section 2 we introduce the basic probabilistic and geometric concepts and results used throughout the work. Section 3 presents our main results on the asymptotic behaviour of energy fluxes and related functionals. Owing to the technical nature of the proofs, most of them are given in Section 4.
2. Preliminaries
This section is devoted to introducing the basic notations and recalling several fundamental results and concepts that will be used throughout this paper.
2.1. Stable convergence and Lévy bases
In this work, the inner product and the norm of vectors
 $x,y\in\mathbb{R}^{d}$
will be represented by
$x,y\in\mathbb{R}^{d}$
will be represented by
 $x\cdot y$
and
$x\cdot y$
and
 $\| x\| $
, respectively. Throughout the following sections
$\| x\| $
, respectively. Throughout the following sections
 $(\Omega,\mathcal{F},\mathbb{P})$
will denote a complete probability space. For a sequence of random vectors
$(\Omega,\mathcal{F},\mathbb{P})$
will denote a complete probability space. For a sequence of random vectors
 $(\xi_{n})_{n\geq1}$
defined on
$(\xi_{n})_{n\geq1}$
defined on
 $(\Omega,\mathcal{F},\mathbb{P})$
, we write
$(\Omega,\mathcal{F},\mathbb{P})$
, we write
 $\xi_{n}=\mathrm{o}_{\mathbb{P}}(1)$
whenever
$\xi_{n}=\mathrm{o}_{\mathbb{P}}(1)$
whenever
 $\xi_{n}\overset{\mathbb{P}}{\rightarrow}0$
, as
$\xi_{n}\overset{\mathbb{P}}{\rightarrow}0$
, as
 $n\rightarrow\infty$
. Furthermore, given a sub-
$n\rightarrow\infty$
. Furthermore, given a sub-
 $\sigma$
-field
$\sigma$
-field
 $\mathcal{G}\subseteq\mathcal{F}$
and a random vector
$\mathcal{G}\subseteq\mathcal{F}$
and a random vector
 $\xi$
(defined possibly on an extension of
$\xi$
(defined possibly on an extension of
 $(\Omega,\mathcal{F},\mathbb{P})$
), we say that
$(\Omega,\mathcal{F},\mathbb{P})$
), we say that
 $\xi_{n}$
converges
$\xi_{n}$
converges
 $\mathcal{G}$
-stably in distribution towards
$\mathcal{G}$
-stably in distribution towards
 $\xi$
, and write
$\xi$
, and write
 $\xi_{n}\overset{\mathcal{G}\text{-}d}{\longrightarrow}\xi$
if, for any
$\xi_{n}\overset{\mathcal{G}\text{-}d}{\longrightarrow}\xi$
if, for any
 $\mathcal{G}$
-measurable random variable
$\mathcal{G}$
-measurable random variable
 $\zeta$
,
$\zeta$
,
 $(\xi_{n},\zeta)\rightarrow(\xi,\zeta)$
weakly as
$(\xi_{n},\zeta)\rightarrow(\xi,\zeta)$
weakly as
 $n\rightarrow\infty$
. Within the above framework, if
$n\rightarrow\infty$
. Within the above framework, if
 $(X_{n}(t))_{t\in T,n\in\mathbb{N}}$
is a sequence of random fields defined on
$(X_{n}(t))_{t\in T,n\in\mathbb{N}}$
is a sequence of random fields defined on
 $(\Omega,\mathcal{F},\mathbb{P})$
, we will write
$(\Omega,\mathcal{F},\mathbb{P})$
, we will write
 $X_{n}\overset{\textit{$\mathcal{G}$-fd}}{\longrightarrow}X$
if the finite-dimensional distributions of
$X_{n}\overset{\textit{$\mathcal{G}$-fd}}{\longrightarrow}X$
if the finite-dimensional distributions of
 $X_{n}$
converge
$X_{n}$
converge
 $\mathcal{G}$
-stably toward the finite-dimensional distributions of X. For a concise exposition of stable convergence, see [Reference Häusler and Luschgy13] and references therein.
$\mathcal{G}$
-stably toward the finite-dimensional distributions of X. For a concise exposition of stable convergence, see [Reference Häusler and Luschgy13] and references therein.
Let
 $\mathscr{S}$
be a non-empty
$\mathscr{S}$
be a non-empty
 $\delta$
-ring of Borel sets of
$\delta$
-ring of Borel sets of
 $\mathbb{R}^d$
that contains an increasing sequence
$\mathbb{R}^d$
that contains an increasing sequence
 $S_n\in\mathscr{S}$
such that
$S_n\in\mathscr{S}$
such that
 $\cup_{n\geq1}S_n=\mathbb{R}^d$
. We set
$\cup_{n\geq1}S_n=\mathbb{R}^d$
. We set
 $\mathcal{B}_{\mathscr{S}}\,:\!=\, \sigma ( \mathcal{S}) $
. The
$\mathcal{B}_{\mathscr{S}}\,:\!=\, \sigma ( \mathcal{S}) $
. The
 $\mathbb{R}^{m}$
-valued random field
$\mathbb{R}^{m}$
-valued random field
 $L=\{L(A)\,\colon A\in\mathscr{S}\}$
is called a Lévy basis if it satisfies the following.
$L=\{L(A)\,\colon A\in\mathscr{S}\}$
is called a Lévy basis if it satisfies the following.
-
(i) For every
 $A\in\mathscr{S}$
, L(A) is infinitely divisible (ID).
$A\in\mathscr{S}$
, L(A) is infinitely divisible (ID). -
(ii) L(A) and L(B) are independent whenever
$A,B\in\mathscr{S}$
and
$A\cap B=\emptyset$
. -
(iii) Given a disjoint sequence
$\lbrace A_{n}\rbrace _{n\geq1}\subseteq\mathscr{S}$
such that
$\cup_{n=1}^{\infty}A_{n}\in\mathscr{S}$
, it holds almost surely (a.s.) that(2.1)where the series is assumed to converge almost surely.
\begin{equation} L \big(\cup_{n=1}^{\infty}A_{n}\big)=\sum_{n\geq1}L(A_{n}),\end{equation}






Remark 2.1. Feature (ii) mentioned above is often called independent scatteredness, which is why some authors may describe L as an infinitely divisible independently scattered random measure. However, the use of the term ‘random measure’ can be misleading because
 $L(\cdot,\omega)$
is not, in general, a true vector-valued measure.
$L(\cdot,\omega)$
is not, in general, a true vector-valued measure.
The Lévy–Khintchine representation for Lévy bases reads as
 \begin{equation*}\mathbb{E}[\!\exp\!(\mathbf{i}z\cdot L(A))]=\exp[\Psi(z,A)], \quad z\in\mathbb{R}^{m},\ A\in\mathscr{S},\end{equation*}
\begin{equation*}\mathbb{E}[\!\exp\!(\mathbf{i}z\cdot L(A))]=\exp[\Psi(z,A)], \quad z\in\mathbb{R}^{m},\ A\in\mathscr{S},\end{equation*}
where
 $\mathbf{i}=\sqrt{-1}$
and
$\mathbf{i}=\sqrt{-1}$
and
 \begin{equation}\Psi(z,A)\,:\!=\, \mathbf{i}\gamma(A)\cdot z-\dfrac{1}{2}z\cdot\Sigma(A)z+\int_{\mathbb{R}^{m}\backslash\{0\}} \big({{\mathrm{e}}}^{\mathbf{i}z\cdot x}-1-\mathbf{i}z\cdot x\mathbf{1}_{\|x\|\leq1}\big)\nu(A,{{\mathrm{d}}} x).\end{equation}
\begin{equation}\Psi(z,A)\,:\!=\, \mathbf{i}\gamma(A)\cdot z-\dfrac{1}{2}z\cdot\Sigma(A)z+\int_{\mathbb{R}^{m}\backslash\{0\}} \big({{\mathrm{e}}}^{\mathbf{i}z\cdot x}-1-\mathbf{i}z\cdot x\mathbf{1}_{\|x\|\leq1}\big)\nu(A,{{\mathrm{d}}} x).\end{equation}
Here
 $\gamma(A)\in\mathbb{R}^m$
,
$\gamma(A)\in\mathbb{R}^m$
,
 $\Sigma(A)$
is an
$\Sigma(A)$
is an
 $m\times m$
non-negative definite matrix, and
$m\times m$
non-negative definite matrix, and
 $\nu ( A,\cdot ) $
is a Lévy measure, i.e.
$\nu ( A,\cdot ) $
is a Lévy measure, i.e.
 $\nu(A,\{0\})=0$
and
$\nu(A,\{0\})=0$
and
 \[\int_{\mathbb{R}^{m}\backslash\{0\}}\big(1\land\| x\| ^{2}\big)\nu(A,{{\mathrm{d}}} x)<\infty.\]
\[\int_{\mathbb{R}^{m}\backslash\{0\}}\big(1\land\| x\| ^{2}\big)\nu(A,{{\mathrm{d}}} x)<\infty.\]
Furthermore, the mappings
 $A\in\mathscr{S}\mapsto\gamma(A)$
,
$A\in\mathscr{S}\mapsto\gamma(A)$
,
 $A\in\mathscr{S}\mapsto\Sigma(A)$
,
$A\in\mathscr{S}\mapsto\Sigma(A)$
,
 $A\in\mathscr{S}\mapsto\nu ( A,B )$
with
$A\in\mathscr{S}\mapsto\nu ( A,B )$
with
 $0\notin\bar{B}$
are
$0\notin\bar{B}$
are
 $\sigma$
-additive. These properties were originally proved for the case
$\sigma$
-additive. These properties were originally proved for the case
 $m=1$
in [Reference Rajput and Rosiński33]; however, their arguments can be extended to the multivariate case as follows. First, the finite additivity of these mappings is obtained in exactly the same way as in the proof of Proposition 2.1 in [Reference Rajput and Rosiński33]. Second, if
$m=1$
in [Reference Rajput and Rosiński33]; however, their arguments can be extended to the multivariate case as follows. First, the finite additivity of these mappings is obtained in exactly the same way as in the proof of Proposition 2.1 in [Reference Rajput and Rosiński33]. Second, if
 $A_n\subseteq\mathscr{S}$
with
$A_n\subseteq\mathscr{S}$
with
 $A_n\downarrow\emptyset$
, (2.1) gives that
$A_n\downarrow\emptyset$
, (2.1) gives that
 $L(A_n)\overset{\mathbb{P}}{\rightarrow}0$
as
$L(A_n)\overset{\mathbb{P}}{\rightarrow}0$
as
 $n\rightarrow\infty$
. In this circumstance, Theorem 8.7 in [Reference Sato39] implies that
$n\rightarrow\infty$
. In this circumstance, Theorem 8.7 in [Reference Sato39] implies that
 $\gamma(A_n)\rightarrow0$
and that for every
$\gamma(A_n)\rightarrow0$
and that for every
 $\varepsilon>0$
,
$\varepsilon>0$
,
 $\nu(A_n,\{x\,\colon \rVert x\rVert\geq\varepsilon\})\rightarrow0$
. Furthermore, by Theorem 15.14 in [Reference Kallenberg19], we may also conclude that
$\nu(A_n,\{x\,\colon \rVert x\rVert\geq\varepsilon\})\rightarrow0$
. Furthermore, by Theorem 15.14 in [Reference Kallenberg19], we may also conclude that
 $z\cdot\Sigma(A_n)z\rightarrow0$
, for every
$z\cdot\Sigma(A_n)z\rightarrow0$
, for every
 $z\in\mathbb{R}^d$
. The
$z\in\mathbb{R}^d$
. The
 $\sigma$
-additivity of
$\sigma$
-additivity of
 $\gamma({\cdot}), \Sigma({\cdot})$
, and
$\gamma({\cdot}), \Sigma({\cdot})$
, and
 $\nu ( \cdot,B )$
follows from the above observations.
$\nu ( \cdot,B )$
follows from the above observations.
Let
 $\mu$
be a
$\mu$
be a
 $\sigma$
-finite measure on
$\sigma$
-finite measure on
 $\mathcal{B}_{\mathscr{S}}$
. We will say that a Lévy basis is separable with control measure
$\mathcal{B}_{\mathscr{S}}$
. We will say that a Lévy basis is separable with control measure
 $\mu$
if
$\mu$
if
 \[\mathbb{E}({\kern-1.5pt}\exp(\mathbf{i}z\cdot L(A)))=\exp(\mu(A)\psi(z)),\]
\[\mathbb{E}({\kern-1.5pt}\exp(\mathbf{i}z\cdot L(A)))=\exp(\mu(A)\psi(z)),\]
where
 \begin{equation*}\psi(z)\,:\!=\, \mathbf{i}\gamma\cdot z-\dfrac{1}{2}z\cdot\Sigma z+\int_{\mathbb{R}^{m}\backslash\{0\}}\big({{\mathrm{e}}}^{\mathbf{i}z\cdot x}-1-\mathbf{i}z\cdot x\mathbf{1}_{\| x\| \leq1} \big)\nu({{\mathrm{d}}} x), \end{equation*}
\begin{equation*}\psi(z)\,:\!=\, \mathbf{i}\gamma\cdot z-\dfrac{1}{2}z\cdot\Sigma z+\int_{\mathbb{R}^{m}\backslash\{0\}}\big({{\mathrm{e}}}^{\mathbf{i}z\cdot x}-1-\mathbf{i}z\cdot x\mathbf{1}_{\| x\| \leq1} \big)\nu({{\mathrm{d}}} x), \end{equation*}
with
 $\gamma\in\mathbb{R}^{m},$
$\gamma\in\mathbb{R}^{m},$
 $\Sigma$
a
$\Sigma$
a
 $m\times m$
non-negative definite matrix, and
$m\times m$
non-negative definite matrix, and
 $\nu$
a Lévy measure. Note that in this situation we may (and do) restrict the domain of L to
$\nu$
a Lévy measure. Note that in this situation we may (and do) restrict the domain of L to
 $\mathcal{B}_{b}^{\mu}(\mathbb{R}^{d})\,:\!=\, \{A\in\mathcal{B}(\mathbb{R}^{d})\,\colon \mu(A)<\infty\}$
. When
$\mathcal{B}_{b}^{\mu}(\mathbb{R}^{d})\,:\!=\, \{A\in\mathcal{B}(\mathbb{R}^{d})\,\colon \mu(A)<\infty\}$
. When
 $\mu=\mathrm{Leb}$
, in which Leb represents the Lebesgue measure on
$\mu=\mathrm{Leb}$
, in which Leb represents the Lebesgue measure on
 $\mathbb{R}^{d}$
, L is called homogeneous. Unless stated otherwise, for the rest of this work we will only consider separable Lévy bases. In this framework, the ID random vector associated with the triplet
$\mathbb{R}^{d}$
, L is called homogeneous. Unless stated otherwise, for the rest of this work we will only consider separable Lévy bases. In this framework, the ID random vector associated with the triplet
 $(\gamma,\Sigma,\nu)$
is known as the Lévy seed of L, and it will be denoted by L
′. As usual,
$(\gamma,\Sigma,\nu)$
is known as the Lévy seed of L, and it will be denoted by L
′. As usual,
 $(\gamma,\Sigma,\nu)$
will be called the characteristic triplet of L, and
$(\gamma,\Sigma,\nu)$
will be called the characteristic triplet of L, and
 $\psi$
its characteristic exponent.
$\psi$
its characteristic exponent.
Any non-zero Lévy measure on
 $\mathbb{R}^{m}$
admits a polar decomposition
$\mathbb{R}^{m}$
admits a polar decomposition
 \begin{equation}\nu(B)=\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}\mathbf{1}_{B}(ru)\rho_{u}({{\mathrm{d}}} r)\lambda({{\mathrm{d}}} u),\end{equation}
\begin{equation}\nu(B)=\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}\mathbf{1}_{B}(ru)\rho_{u}({{\mathrm{d}}} r)\lambda({{\mathrm{d}}} u),\end{equation}
where
 $\mathbb{S}^{m-1}$
is the unit sphere in
$\mathbb{S}^{m-1}$
is the unit sphere in
 $\mathbb{R}^{m}$
,
$\mathbb{R}^{m}$
,
 $\lambda$
is a finite measure on
$\lambda$
is a finite measure on
 $\mathbb{S}^{m-1}$
, and
$\mathbb{S}^{m-1}$
, and
 $\{\rho_{u}\,\colon u\in\mathbb{S}^{m-1}\}$
is a family of Lévy measures on
$\{\rho_{u}\,\colon u\in\mathbb{S}^{m-1}\}$
is a family of Lévy measures on
 $(0,\infty)$
such that the mapping
$(0,\infty)$
such that the mapping
 $u\mapsto\rho_{u}(B)$
is measurable for all
$u\mapsto\rho_{u}(B)$
is measurable for all
 $A\in\mathcal{B}((0,\infty))$
.
$A\in\mathcal{B}((0,\infty))$
.
Let
 $0<\alpha\leq2$
and let
$0<\alpha\leq2$
and let
 $\lambda$
be a finite measure on
$\lambda$
be a finite measure on
 $\mathbb{S}^{m-1}$
. A separable Lévy basis is called strictly
$\mathbb{S}^{m-1}$
. A separable Lévy basis is called strictly
 $\alpha$
-stable if its Lévy seed is distributed according to a strictly
$\alpha$
-stable if its Lévy seed is distributed according to a strictly
 $\alpha$
-stable distribution with spectral measure
$\alpha$
-stable distribution with spectral measure
 $\lambda$
; that is,
$\lambda$
; that is,
 $L'$
is centred Gaussian with covariance
$L'$
is centred Gaussian with covariance
 $\Sigma$
if
$\Sigma$
if
 $\alpha=2$
, while for
$\alpha=2$
, while for
 $0<\alpha<2$
the characteristic triplet of
$0<\alpha<2$
the characteristic triplet of
 $L'$
has no Gaussian component (
$L'$
has no Gaussian component (
 $\Sigma=0$
), its Lévy measure admits the polar decomposition
$\Sigma=0$
), its Lévy measure admits the polar decomposition
 \[\nu(B)=\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}\mathbf{1}_{B}(ru)\dfrac{{{\mathrm{d}}} r}{r^{1+\alpha}}\lambda({{\mathrm{d}}} u),\]
\[\nu(B)=\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}\mathbf{1}_{B}(ru)\dfrac{{{\mathrm{d}}} r}{r^{1+\alpha}}\lambda({{\mathrm{d}}} u),\]
and
 \[\gamma=\dfrac{\int_{\mathbb{S}^{m-1}}u\lambda({{\mathrm{d}}} u)}{(1-\alpha)}\quad\text{if $\alpha\neq1$.}\]
\[\gamma=\dfrac{\int_{\mathbb{S}^{m-1}}u\lambda({{\mathrm{d}}} u)}{(1-\alpha)}\quad\text{if $\alpha\neq1$.}\]
However, if
 $\alpha=1$
,
$\alpha=1$
,
 $\gamma$
can be arbitrary but with the restriction that
$\gamma$
can be arbitrary but with the restriction that
 $\int_{\mathbb{S}^{m-1}}u\lambda({{\mathrm{d}}} u)=0$
. For
$\int_{\mathbb{S}^{m-1}}u\lambda({{\mathrm{d}}} u)=0$
. For
 $\alpha<2$
, the characteristic exponent of a strictly
$\alpha<2$
, the characteristic exponent of a strictly
 $\alpha$
-stable Lévy basis can be written as
$\alpha$
-stable Lévy basis can be written as
 \begin{equation}\psi_{\alpha}(z)\,:\!=\,\begin{cases}\displaystyle -\int_{\mathbb{S}^{m-1}}| z\cdot u|^{\alpha}\varphi_{\alpha}(z,u)\lambda({{\mathrm{d}}} u) & \text{if $ \alpha\neq1$,}\\[9pt]\displaystyle -\int_{\mathbb{S}^{m-1}}| z\cdot u|\varphi_{\alpha}(z,u)\lambda({{\mathrm{d}}} u)+\mathbf{i}\gamma z & \text{if $ \alpha=1$,}\end{cases}\end{equation}
\begin{equation}\psi_{\alpha}(z)\,:\!=\,\begin{cases}\displaystyle -\int_{\mathbb{S}^{m-1}}| z\cdot u|^{\alpha}\varphi_{\alpha}(z,u)\lambda({{\mathrm{d}}} u) & \text{if $ \alpha\neq1$,}\\[9pt]\displaystyle -\int_{\mathbb{S}^{m-1}}| z\cdot u|\varphi_{\alpha}(z,u)\lambda({{\mathrm{d}}} u)+\mathbf{i}\gamma z & \text{if $ \alpha=1$,}\end{cases}\end{equation}
where
 \[\varphi_{\alpha}(z,u)=\begin{cases}1-\mathbf{i}\rho\mathrm{sign}(z\cdot u)\tan(\pi\beta/2) & \text{if $ \alpha\neq1$,}\\[4pt]1+\mathbf{i}\dfrac{2}{\pi}\mathrm{sign}(z\cdot u)\log(| z\cdot u|) & \text{if $ \alpha=1$.}\end{cases}\]
\[\varphi_{\alpha}(z,u)=\begin{cases}1-\mathbf{i}\rho\mathrm{sign}(z\cdot u)\tan(\pi\beta/2) & \text{if $ \alpha\neq1$,}\\[4pt]1+\mathbf{i}\dfrac{2}{\pi}\mathrm{sign}(z\cdot u)\log(| z\cdot u|) & \text{if $ \alpha=1$.}\end{cases}\]
For the facts and concepts discussed in this section, we refer the reader to [Reference Rosiński37], [Reference Samorodnitsky and Taqqu38], and [Reference Sato39].
2.2. Integration with respect to a Lévy basis
In the following, we present the necessary elements regarding integration with respect to a Lévy basis when the integrand is deterministic. Such a theory was first introduced by Urbanik and Woyczynski (1967) and detailed in [Reference Rajput and Rosiński33]. Since we are focused on homogeneous Lévy bases, we restrict our attention to such a case.
The stochastic integral
 $\int_{{\mathbb{R}}^d} f(q)L({{\mathrm{d}}} q) $
of a deterministic measurable function
$\int_{{\mathbb{R}}^d} f(q)L({{\mathrm{d}}} q) $
of a deterministic measurable function
 $f\,\colon \mathbb{R}^{d}\rightarrow \mathbb{R}$
with respect to a
$f\,\colon \mathbb{R}^{d}\rightarrow \mathbb{R}$
with respect to a
 $\mathbb{R}$
-valued homogeneous Lévy basis L is defined in two steps.
$\mathbb{R}$
-valued homogeneous Lévy basis L is defined in two steps.
-
(a) If
$f=\sum_{i=1}^{n}a_{i}1_{A_{i}}$
is a real simple function on
$\mathbb{R}^{d}$
with
$A_{1},\ldots ,A_{n} \in \mathcal{B}_b^{\mathrm{Leb}}( \mathbb{R}^{d})$
disjoint, for
$A\in \mathscr{S}$
, we define
\begin{equation*}\int_{A}f(q) L({{\mathrm{d}}} q) =\sum_{i=1}^{n}a_{i} L ( A_{i}\cap A) .\end{equation*}
-
(b) If
$f\,\colon \mathbb{R}^{d}\rightarrow \mathbb{R}$
can be approximated almost everywhere (with respect to the Lebesgue measure) by a sequence of simple functions
$\{ f_{n}\} $
as those in (a), we define (provided that the limit exists) (2.5)for
\begin{equation}\int_{A}f(q) L({{\mathrm{d}}} q) =\text{$\mathbb{P}$-lim}\ \int_{A}f_{n}(q) L({{\mathrm{d}}} q) ,\end{equation}
$A\in \mathscr{S}$
, and where
${\mathbb{P}}$
-lim stands for convergence in probability.










We say that a measurable function
 $f\,\colon \mathbb{R}^{d}\rightarrow \mathbb{R}$
is L -integrable if the limit in (2.5) exists for every
$f\,\colon \mathbb{R}^{d}\rightarrow \mathbb{R}$
is L -integrable if the limit in (2.5) exists for every
 $A\in \mathscr{S}$
. It is important to note that the integral is well-defined in the sense that it does not depend on the approximating sequence
$A\in \mathscr{S}$
. It is important to note that the integral is well-defined in the sense that it does not depend on the approximating sequence
 $\{\, f_{n}\} $
, and is infinitely divisible, with its characteristic function satisfying that
$\{\, f_{n}\} $
, and is infinitely divisible, with its characteristic function satisfying that
 \begin{equation*}\mathbb{E}\biggl(\exp\biggl(\mathbf{i}z\cdot \int_{A}f(q) L({{\mathrm{d}}} q)\biggr)\biggr)=\exp\biggl(\int_{A} \psi (z\ f(q)) \,{{\mathrm{d}}} q\biggr),\end{equation*}
\begin{equation*}\mathbb{E}\biggl(\exp\biggl(\mathbf{i}z\cdot \int_{A}f(q) L({{\mathrm{d}}} q)\biggr)\biggr)=\exp\biggl(\int_{A} \psi (z\ f(q)) \,{{\mathrm{d}}} q\biggr),\end{equation*}
where
 $\psi$
is the characteristic exponent of the Lévy seed L
′. Necessary and sufficient conditions for the L-integrability of a given function
$\psi$
is the characteristic exponent of the Lévy seed L
′. Necessary and sufficient conditions for the L-integrability of a given function
 $f\,\colon \mathbb{R}^{d} \to \mathbb{R}$
were established in [Reference Rajput and Rosiński33]. In particular, every continuous function with compact support is integrable with respect to L, a fact that will be used throughout this work.
$f\,\colon \mathbb{R}^{d} \to \mathbb{R}$
were established in [Reference Rajput and Rosiński33]. In particular, every continuous function with compact support is integrable with respect to L, a fact that will be used throughout this work.
When L is an
 $\mathbb{R}^{m}$
-valued homogeneous Lévy basis and
$\mathbb{R}^{m}$
-valued homogeneous Lévy basis and
 $f\,\colon \mathbb{R}^{d} \rightarrow \mathbb{R}^{d\times m}$
, the integral
$f\,\colon \mathbb{R}^{d} \rightarrow \mathbb{R}^{d\times m}$
, the integral
 $\smallint_A f {{\mathrm{d}}} L $
constitutes a d-dimensional random vector such that its ith element is given by
$\smallint_A f {{\mathrm{d}}} L $
constitutes a d-dimensional random vector such that its ith element is given by
 \begin{equation} \biggl[\int_{A}f(q) L({{\mathrm{d}}} q)\biggr] ^{(i)}=\sum_{j=1}^{m}\int_{A}f^{(i,j)}(q)L^{(j)}({{\mathrm{d}}} q),\quad i=1,\ldots,d.\end{equation}
\begin{equation} \biggl[\int_{A}f(q) L({{\mathrm{d}}} q)\biggr] ^{(i)}=\sum_{j=1}^{m}\int_{A}f^{(i,j)}(q)L^{(j)}({{\mathrm{d}}} q),\quad i=1,\ldots,d.\end{equation}
2.3. Geometrical preliminaries
For any
 $A\subseteq\mathbb{R}^{d},$
we let
$A\subseteq\mathbb{R}^{d},$
we let
 $-A=\{-x\,\colon x\in A\}$
. Furthermore, we let
$-A=\{-x\,\colon x\in A\}$
. Furthermore, we let
 $\mathring{A},\bar{A},\partial A,$
and
$\mathring{A},\bar{A},\partial A,$
and
 $A^{c}$
denote the interior, closure, boundary, and complement of A, respectively, and we put
$A^{c}$
denote the interior, closure, boundary, and complement of A, respectively, and we put
 $A^{*}=\bar{A^{c}}$
. An open set
$A^{*}=\bar{A^{c}}$
. An open set
 $\mathfrak{D}\subseteq\mathbb{R}^{d}$
is said to be a Lipschitz domain if its boundary can be locally described as the graph of a Lipschitz function defined on an open set of
$\mathfrak{D}\subseteq\mathbb{R}^{d}$
is said to be a Lipschitz domain if its boundary can be locally described as the graph of a Lipschitz function defined on an open set of
 $\mathbb{R}^{d-1}$
. We will say that a
$\mathbb{R}^{d-1}$
. We will say that a
 $(d-1)$
-dimensional manifold
$(d-1)$
-dimensional manifold
 $M\subseteq\mathbb{R}^{d}$
is Lipschitz if it is the boundary of a Lipschitz domain. For
$M\subseteq\mathbb{R}^{d}$
is Lipschitz if it is the boundary of a Lipschitz domain. For
 $s>0$
, the s-dimensional Hausdorff measure will be represented by
$s>0$
, the s-dimensional Hausdorff measure will be represented by
 $\mathcal{H}^{s}$
. Now, fix a closed set
$\mathcal{H}^{s}$
. Now, fix a closed set
 $A\subseteq\mathbb{R}^{d}$
. The metric projection on A,
$A\subseteq\mathbb{R}^{d}$
. The metric projection on A,
 $\Pi_{A}\,\colon \mathbb{R}^{d}\rightarrow A$
, is the set function
$\Pi_{A}\,\colon \mathbb{R}^{d}\rightarrow A$
, is the set function
 \[\Pi_{A}(q)\,:\!=\, \{p\in A\,\colon d_{A}(q)=\| p-q\| \},\]
\[\Pi_{A}(q)\,:\!=\, \{p\in A\,\colon d_{A}(q)=\| p-q\| \},\]
where
 $d_{A}(q)\,:\!=\, \inf_{p\in A}\| p-q\| $
. We set
$d_{A}(q)\,:\!=\, \inf_{p\in A}\| p-q\| $
. We set
 \[\mathrm{Unp}A\,:\!=\, \big\{q\in\mathbb{R}^{d}\,\colon \exists!p\in A\ \text{s.t.}\ d_{A}(q)=\| p-q\| \big\}.\]
\[\mathrm{Unp}A\,:\!=\, \big\{q\in\mathbb{R}^{d}\,\colon \exists!p\in A\ \text{s.t.}\ d_{A}(q)=\| p-q\| \big\}.\]
The set
 $\mathrm{Unp}A$
is a Borel set and such that
$\mathrm{Unp}A$
is a Borel set and such that
 $\mathrm{Leb}(\mathbb{R}^{d}\backslash\mathrm{Unp}A)=0$
. Under the above notation, the reduced normal bundle and the reach function of A are given, respectively, by
$\mathrm{Leb}(\mathbb{R}^{d}\backslash\mathrm{Unp}A)=0$
. Under the above notation, the reduced normal bundle and the reach function of A are given, respectively, by
 \[N(A)=\{ (\Pi_{A}(q),(q-\Pi_{A}(q))/\| q-\Pi_{A}(q)\| )\,\colon q\in\mathrm{Unp}(A)\backslash A\} \subseteq\partial A\times\mathbb{S}^{d-1},\]
\[N(A)=\{ (\Pi_{A}(q),(q-\Pi_{A}(q))/\| q-\Pi_{A}(q)\| )\,\colon q\in\mathrm{Unp}(A)\backslash A\} \subseteq\partial A\times\mathbb{S}^{d-1},\]
and
 $\delta_{A}(q,u)\,:\!=\, 0$
for
$\delta_{A}(q,u)\,:\!=\, 0$
for
 $(q,u)\in N(A)^{c}$
, while for
$(q,u)\in N(A)^{c}$
, while for
 $(q,u)\in N(A)$
,
$(q,u)\in N(A)$
,
 \begin{equation*}\delta_{A}(q,u)\,:\!=\, \inf\{t\geq0\,\colon q+tu\in\mathrm{Unp}(A)^{c}\}. \end{equation*}
\begin{equation*}\delta_{A}(q,u)\,:\!=\, \inf\{t\geq0\,\colon q+tu\in\mathrm{Unp}(A)^{c}\}. \end{equation*}
Following [Reference Kiderlen and Rataj20], we will say that a closed set
 $A\subseteq\mathbb{R}^{d}$
is gentle if the following hold:
$A\subseteq\mathbb{R}^{d}$
is gentle if the following hold:
-
(i) For all bounded
$B\in\mathcal{B}(\mathbb{R}^{d}),$
$\mathcal{H}^{d-1}(N(\partial A)\cap(B\times\mathbb{S}^{d-1}))<\infty$
. -
(ii) For
$\mathcal{H}^{d-1}$
-almost every (
$\mathcal{H}^{d-1}$
-a.e.)
$x\in\partial A$
, there are non-degenerate balls
$B_{i}\subseteq A$
and
$B_{o}\subseteq A^{*}$
containing x.







Thus, if
 $A\subseteq\mathbb{R}^{d}$
is a gentle set, then we have the following:
$A\subseteq\mathbb{R}^{d}$
is a gentle set, then we have the following:
-
(i) For
$\mathcal{H}^{d-1}$
-a.e.
$x\in\partial A$
, there is
$n=n_{A}(x)\in\mathbb{S}^{d-1}$
such that
$(x,n)\in N(A)$
and
$(x,-n)\in N(A^{*})$
. Furthermore, the mapping
$x\mapsto(x,n_{A}(x))$
is measurable. -
(ii) It holds that
$\mathrm{Leb}(\partial A)=0$
. If in addition A is compact, we also have
$\mathcal{H}^{d-1}(\partial A)<\infty$
. -
(iii) Any translation of A is gentle since for all
$p\in\mathbb{R}^{d}$
,
$d_{A+p}(q)=d_{A}(q-p)$
and
\[\Pi_{A+p}(q)=\Pi_{A}(q-p)+p.\]











For
 $r\geq0$
, the r-parallel set of A is defined as
$r\geq0$
, the r-parallel set of A is defined as
 \begin{equation*}A_{\oplus r}\,:\!=\, \big\{q\in\mathbb{R}^{d}\,\colon d_{A}(q)\leq r \big\}. \end{equation*}
\begin{equation*}A_{\oplus r}\,:\!=\, \big\{q\in\mathbb{R}^{d}\,\colon d_{A}(q)\leq r \big\}. \end{equation*}
For a detailed exposition of the geometrical terms introduced above, see [Reference Federer11] and [Reference Hug, Last and Weil15].
3. Limit theorems for energy fluxes
Through this section we fix
 $m,d\in\mathbb{N}$
, with
$m,d\in\mathbb{N}$
, with
 $d\geq2$
,
$d\geq2$
,
 $p_{0}\in\mathbb{R}^{d}$
, and a bounded Lipschitz domain
$p_{0}\in\mathbb{R}^{d}$
, and a bounded Lipschitz domain
 $\mathfrak{D}\subseteq\mathbb{R}^{d}$
. We further assume that M, the boundary of
$\mathfrak{D}\subseteq\mathbb{R}^{d}$
. We further assume that M, the boundary of
 $\mathfrak{D}$
, is a
$\mathfrak{D}$
, is a
 $(d-1)$
-dimensional compact manifold. For the rest of this paper
$(d-1)$
-dimensional compact manifold. For the rest of this paper
 $\partial_{k}f$
will represent the partial derivative of a function with respect to its kth variable.
$\partial_{k}f$
will represent the partial derivative of a function with respect to its kth variable.
In the following, we define the energy flux of a field X through the region
 $ \mathfrak{R} = r\mathfrak{D} + p_0 $
as the integral
$ \mathfrak{R} = r\mathfrak{D} + p_0 $
as the integral
 \begin{equation} \mathscr{E}_r \equiv \mathscr{E}_r(p_0) = \int_{rM + p_0} \phi(X(y)) \cdot u_{rM + p_0}(y) \, \mathcal{H}^{d-1}({{\mathrm{d}}} y), \quad r > 0,\end{equation}
\begin{equation} \mathscr{E}_r \equiv \mathscr{E}_r(p_0) = \int_{rM + p_0} \phi(X(y)) \cdot u_{rM + p_0}(y) \, \mathcal{H}^{d-1}({{\mathrm{d}}} y), \quad r > 0,\end{equation}
where
 $ u_{rM + p_0} $
denotes the unit outward normal vector to the boundary
$ u_{rM + p_0} $
denotes the unit outward normal vector to the boundary
 $ rM + p_0 $
. As discussed earlier, the scalar quantity
$ rM + p_0 $
. As discussed earlier, the scalar quantity
 $ \mathscr{E}_r $
represents the integral flux of the vector field
$ \mathscr{E}_r $
represents the integral flux of the vector field
 $ \phi(X({\cdot})) $
across the region
$ \phi(X({\cdot})) $
across the region
 $ \mathfrak{R} $
. While in physics the term energy flux typically refers to cases in which
$ \mathfrak{R} $
. While in physics the term energy flux typically refers to cases in which
 $ \phi(X({\cdot})) $
has a direct energetic interpretation, we adopt the terminology more broadly here for convenience. Notice that when X denotes the velocity field of a fluid, the choice
$ \phi(X({\cdot})) $
has a direct energetic interpretation, we adopt the terminology more broadly here for convenience. Notice that when X denotes the velocity field of a fluid, the choice
 $ \phi(x) = \|x\|^2 x $
makes
$ \phi(x) = \|x\|^2 x $
makes
 $\mathcal{E}_r$
(up to a constant factor) the surface integral of the advective kinetic energy flux.
$\mathcal{E}_r$
(up to a constant factor) the surface integral of the advective kinetic energy flux.
If we assume that
 $0\in\mathfrak{D}$
, then
$0\in\mathfrak{D}$
, then
 $p_{0}\in \mathfrak{R}$
. Thus the quantity
$p_{0}\in \mathfrak{R}$
. Thus the quantity
 $\mathscr{E}_{r}(p_0)/| \mathfrak{R}|$
converges to the divergence of the random field
$\mathscr{E}_{r}(p_0)/| \mathfrak{R}|$
converges to the divergence of the random field
 $\phi(X({\cdot}))$
at
$\phi(X({\cdot}))$
at
 $p_0$
as
$p_0$
as
 $r\rightarrow 0$
. Therefore, when
$r\rightarrow 0$
. Therefore, when
 $\mathscr{E}_{r}$
represents the integral flux of the advective kinetic energy flux of a fluid, the normalised integral
$\mathscr{E}_{r}$
represents the integral flux of the advective kinetic energy flux of a fluid, the normalised integral
 $\mathscr{E}_{r}(p_0)/|\mathfrak{R}|$
converges to the divergence of the advective kinetic energy at
$\mathscr{E}_{r}(p_0)/|\mathfrak{R}|$
converges to the divergence of the advective kinetic energy at
 $p_0$
, as
$p_0$
, as
 $|\mathfrak{R}|\rightarrow 0$
. As discussed earlier, for turbulent flows, this quantity represents the local advective redistribution of kinetic energy by the velocity field at
$|\mathfrak{R}|\rightarrow 0$
. As discussed earlier, for turbulent flows, this quantity represents the local advective redistribution of kinetic energy by the velocity field at
 $p_0$
. It quantifies the local rate at which the flow transports kinetic energy.
$p_0$
. It quantifies the local rate at which the flow transports kinetic energy.
Note that by the Divergence Theorem (see e.g. [Reference Evans and Gariepy9]) and the change of variables
 $z=p_0+ry$
,
$z=p_0+ry$
,
 \[\dfrac{1}{r^{d-1}}\mathscr{E}_{r}=\int_{M}[\phi(X(p_{0}+ry))-\phi(X(p_{0}))]\cdot u_M(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\]
\[\dfrac{1}{r^{d-1}}\mathscr{E}_{r}=\int_{M}[\phi(X(p_{0}+ry))-\phi(X(p_{0}))]\cdot u_M(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\]
This relation illustrates that
 $\mathscr{E}_{r}$
can be interpreted as the ‘average’ (on M) of the increments of
$\mathscr{E}_{r}$
can be interpreted as the ‘average’ (on M) of the increments of
 $\phi(X({\cdot}))$
projected onto the direction of the outward vector of M. In consequence, the analysis of the local behaviour of energy fluxes reduces to studying the asymptotic behaviour (as
$\phi(X({\cdot}))$
projected onto the direction of the outward vector of M. In consequence, the analysis of the local behaviour of energy fluxes reduces to studying the asymptotic behaviour (as
 $r\downarrow0$
) of the functional
$r\downarrow0$
) of the functional
 \begin{equation*}Z^{\phi,r}(t,f)\,:\!=\, \int_{M}[\phi(X(p_{0}+r\,t\,y))-\phi(X(p_{0}))]\cdot f(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y),\quad t\geq0, \end{equation*}
\begin{equation*}Z^{\phi,r}(t,f)\,:\!=\, \int_{M}[\phi(X(p_{0}+r\,t\,y))-\phi(X(p_{0}))]\cdot f(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y),\quad t\geq0, \end{equation*}
where f is a measurable function. In this paper, we concentrate on the case when
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
. Furthermore, for the rest of this work, we will focus on the situation in which X is the ID field given by
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
. Furthermore, for the rest of this work, we will focus on the situation in which X is the ID field given by
 \begin{equation}X(p)\,:\!=\, \int_{A+p}F(p,q)L({{\mathrm{d}}} q),\quad p\in\mathbb{R}^{d}.\end{equation}
\begin{equation}X(p)\,:\!=\, \int_{A+p}F(p,q)L({{\mathrm{d}}} q),\quad p\in\mathbb{R}^{d}.\end{equation}
We will always assume that L is an
 $\mathbb{R}^{m}$
-valued homogeneous Lévy basis with characteristic triplet
$\mathbb{R}^{m}$
-valued homogeneous Lévy basis with characteristic triplet
 $(\gamma,\Sigma,\nu)$
,
$(\gamma,\Sigma,\nu)$
,
 $F\,\colon \mathbb{R}^{d}\times\mathbb{R}^{d}\rightarrow\mathbb{R}^{d\times m}$
is of class
$F\,\colon \mathbb{R}^{d}\times\mathbb{R}^{d}\rightarrow\mathbb{R}^{d\times m}$
is of class
 $C^1$
, and that
$C^1$
, and that
 $A\subseteq\mathbb{R}^{d}$
is a compact set. Note that (3.2) means that the ith element of X(p) follows the dynamics
$A\subseteq\mathbb{R}^{d}$
is a compact set. Note that (3.2) means that the ith element of X(p) follows the dynamics
 \begin{equation}X^{(i)}(p)=\sum_{j=1}^{m}\int_{A+p}F^{(i,j)}(p,q)L^{(j)}({{\mathrm{d}}} q),\quad i=1,\ldots,d.\end{equation}
\begin{equation}X^{(i)}(p)=\sum_{j=1}^{m}\int_{A+p}F^{(i,j)}(p,q)L^{(j)}({{\mathrm{d}}} q),\quad i=1,\ldots,d.\end{equation}
Since each
 $L^{(i)}$
is a homogeneous Lévy basis, and F is continuous, the integrals in (3.3) are well-defined in the sense of [Reference Rajput and Rosiński33].
$L^{(i)}$
is a homogeneous Lévy basis, and F is continuous, the integrals in (3.3) are well-defined in the sense of [Reference Rajput and Rosiński33].
3.1. Main results
In this subsection we present our main findings on the functionals introduced above. We start by verifying that
 $Z^{\phi,r}$
is well-defined for a large class of test functions. Recall that a function
$Z^{\phi,r}$
is well-defined for a large class of test functions. Recall that a function
 $\phi\,\colon \mathbb{R}^{d}\rightarrow\mathbb{R}^{d}$
is said to be of polynomial growth of order
$\phi\,\colon \mathbb{R}^{d}\rightarrow\mathbb{R}^{d}$
is said to be of polynomial growth of order
 $\beta\geq0$
if there is some
$\beta\geq0$
if there is some
 $C>0$
such that
$C>0$
such that
 \[\| \phi(x)\| \leq C \big(1+\| x\| ^{\beta}\big) \quad \text{for all $ x\in\mathbb{R}^{d}$.}\]
\[\| \phi(x)\| \leq C \big(1+\| x\| ^{\beta}\big) \quad \text{for all $ x\in\mathbb{R}^{d}$.}\]
Proposition 3.1. Let X be defined as in (3.2). If
 $\phi\,\colon \mathbb{R}^{d}\rightarrow\mathbb{R}^{d}$
is measurable and of polynomial growth of order
$\phi\,\colon \mathbb{R}^{d}\rightarrow\mathbb{R}^{d}$
is measurable and of polynomial growth of order
 $\beta\geq0$
, then for all
$\beta\geq0$
, then for all
 $t\geq0$
and for every
$t\geq0$
and for every
 $f\in\mathcal{L}^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
,
$f\in\mathcal{L}^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
,
 \[\mathbb{P}\big( | Z^{\phi,r}(t,f) | < \infty \big)=1. \]
\[\mathbb{P}\big( | Z^{\phi,r}(t,f) | < \infty \big)=1. \]
If X models the velocity vector field of an incompressible fluid, then for
 $\phi(x)=x$
, necessarily we must have
$\phi(x)=x$
, necessarily we must have
 \[r^{-1} Z^{\phi,r}(1,u_M)=\dfrac{1}{r^{d}}\mathscr{E}_{r}\rightarrow0,\]
\[r^{-1} Z^{\phi,r}(1,u_M)=\dfrac{1}{r^{d}}\mathscr{E}_{r}\rightarrow0,\]
as
 $r\downarrow0$
. Within our framework, this will only be the case in very specific situations. In fact, as pointed out in [Reference Sauri41], the asymptotic behaviour of
$r\downarrow0$
. Within our framework, this will only be the case in very specific situations. In fact, as pointed out in [Reference Sauri41], the asymptotic behaviour of
 $Z^{\phi,r}$
strongly depends on whether L is of finite variation. Our study in the latter case is performed under the following assumption (recall that we always assume that L is homogeneous).
$Z^{\phi,r}$
strongly depends on whether L is of finite variation. Our study in the latter case is performed under the following assumption (recall that we always assume that L is homogeneous).
Assumption 3.1. (
 $\mathbf{A}_{\alpha}. $
) For a given
$\mathbf{A}_{\alpha}. $
) For a given
 $1<\alpha\leq2$
, the characteristic triplet of L,
$1<\alpha\leq2$
, the characteristic triplet of L,
 $(\gamma,\Sigma,\nu)$
, satisfies the following.
$(\gamma,\Sigma,\nu)$
, satisfies the following.
-
(i) If
$\alpha=2$
,
$\Sigma\neq0$
. -
(ii) For
$1<\alpha<2$
,
$\Sigma=0$
and
$\nu$
admits the polar decomposition in (2.3). Furthermore, there is a non-zero
$\lambda$
-integrable function K such that as
$s\downarrow0$
, (3.4)and
\begin{equation}s^{\alpha}\rho_{u}(s,\infty)\rightarrow K(u)\quad \text{{$\lambda$-a.e.,}}\end{equation}
(3.5)
\begin{equation}\sup_{u\in\mathbb{S}^{m-1}}\sup_{0\leq s\leq T}s^{\alpha}\rho_{u}(s,\infty)<\infty\quad \text{for all $ T>0$.}\end{equation}









Remark 3.1. In the one-dimensional case, i.e. when
 $m=1$
, it is well known that (3.4) implies that the distribution of the ‘small jumps’ of L belongs to the domain of attraction of an
$m=1$
, it is well known that (3.4) implies that the distribution of the ‘small jumps’ of L belongs to the domain of attraction of an
 $\alpha$
-stable distribution. Not surprisingly, the same result holds in the multivariate context under Assumption
$\alpha$
-stable distribution. Not surprisingly, the same result holds in the multivariate context under Assumption
 ${\mathbf{A}}_\alpha$
; see Lemma 4.3 below. Finally, we would like to emphasise that (3.5) is fulfilled if (3.4) holds and either the support of
${\mathbf{A}}_\alpha$
; see Lemma 4.3 below. Finally, we would like to emphasise that (3.5) is fulfilled if (3.4) holds and either the support of
 $\lambda$
is finite or
$\lambda$
is finite or
 $\rho_{u}$
does not depend on u. Examples of infinitely divisible distributions on the real line satisfying Assumption
$\rho_{u}$
does not depend on u. Examples of infinitely divisible distributions on the real line satisfying Assumption
 ${\mathbf{A}}_\alpha$
are discussed in [Reference Ivanovs17] and [Reference Sauri41], and references therein.
${\mathbf{A}}_\alpha$
are discussed in [Reference Ivanovs17] and [Reference Sauri41], and references therein.
In view of Proposition 3.1, we will also restrict to test functions
 $\phi$
of polynomial growth. Thus, for
$\phi$
of polynomial growth. Thus, for
 $N\in\mathbb{N}$
and
$N\in\mathbb{N}$
and
 $\beta\geq N$
,
$\beta\geq N$
,
 $C_{\beta}^{N}$
will denote the family of functions
$C_{\beta}^{N}$
will denote the family of functions
 $\phi\,\colon \mathbb{R}^{d}\rightarrow\mathbb{R}^{d}$
of class
$\phi\,\colon \mathbb{R}^{d}\rightarrow\mathbb{R}^{d}$
of class
 $C^{N}$
such that
$C^{N}$
such that
 \[\| \mathscr{D}^{\kern1.5pt j}\phi(x)\| \leq C \big(1+\| x\| ^{\beta-j} \big),\quad j=0,1,2,\ldots,N,\]
\[\| \mathscr{D}^{\kern1.5pt j}\phi(x)\| \leq C \big(1+\| x\| ^{\beta-j} \big),\quad j=0,1,2,\ldots,N,\]
where
 $\mathscr{D}^{\kern1.5pt j}\phi$
denotes the vector containing all the partial derivatives of
$\mathscr{D}^{\kern1.5pt j}\phi$
denotes the vector containing all the partial derivatives of
 $\phi$
of order j. A key example is
$\phi$
of order j. A key example is
 $\phi(x)=\| x\| ^{2}x$
(the test function associated with the kinetic energy), which belongs to
$\phi(x)=\| x\| ^{2}x$
(the test function associated with the kinetic energy), which belongs to
 $C_{3}^{2}$
.
$C_{3}^{2}$
.
Next we introduce some auxiliary random fields that will be used for the representation of the limit of
 $Z^{\phi,r}$
. Recall that the support function of a compact set M is defined as
$Z^{\phi,r}$
. Recall that the support function of a compact set M is defined as
 \[h_{M}(q)\,:\!=\, \sup\{q\cdot p\,\colon p\in M\},\quad q\in\mathbb{R}^{d}.\]
\[h_{M}(q)\,:\!=\, \sup\{q\cdot p\,\colon p\in M\},\quad q\in\mathbb{R}^{d}.\]
To every gentle compact set (see Section 2.3)
 $A\subseteq\mathbb{R}^{d}$
, we associate the following
$A\subseteq\mathbb{R}^{d}$
, we associate the following
 $\sigma$
-finite measures on
$\sigma$
-finite measures on
 $\mathcal{B}(\mathbb{R}^{+}\times\mathbb{R}^{d}\times\mathbb{S}^{d-1})$
:
$\mathcal{B}(\mathbb{R}^{+}\times\mathbb{R}^{d}\times\mathbb{S}^{d-1})$
:
 \[\mu^{\pm}_{M,A}(B)\,:\!=\, \int_{0}^{\infty}\int_{\partial A}1_{B}(s,x+p_0,\pm n_{A}(x))h_{M}(\!\pm n_{A}(x))^{+}\mathcal{H}^{d-1}({{\mathrm{d}}} x)\,{{\mathrm{d}}} s,\]
\[\mu^{\pm}_{M,A}(B)\,:\!=\, \int_{0}^{\infty}\int_{\partial A}1_{B}(s,x+p_0,\pm n_{A}(x))h_{M}(\!\pm n_{A}(x))^{+}\mathcal{H}^{d-1}({{\mathrm{d}}} x)\,{{\mathrm{d}}} s,\]
where
 $x^{+}=\max\{0,x\}$
. For every
$x^{+}=\max\{0,x\}$
. For every
 $(s,x,n)\in\mathbb{R}^{+}\times N(A)$
,
$(s,x,n)\in\mathbb{R}^{+}\times N(A)$
,
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, and
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, and
 $t\geq0$
, put
$t\geq0$
, put
 \begin{equation*}G(t,f,s,x,n)\,:\!=\, \int_{M}f(y)^{\prime}\mathbf{1}_{[h_{M}(n)s,+\infty)}(ty\cdot n)\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(p_{0},x), \end{equation*}
\begin{equation*}G(t,f,s,x,n)\,:\!=\, \int_{M}f(y)^{\prime}\mathbf{1}_{[h_{M}(n)s,+\infty)}(ty\cdot n)\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(p_{0},x), \end{equation*}
where F is the kernel function representing X in (3.2). Now, for a given
 $\mathbb{R}^{m}$
-valued homogeneous Lévy basis satisfying Assumption
$\mathbb{R}^{m}$
-valued homogeneous Lévy basis satisfying Assumption
 ${\mathbf{A}}_\alpha$
, we construct (on an extension of
${\mathbf{A}}_\alpha$
, we construct (on an extension of
 $(\Omega,\mathcal{F},\mathbb{P})$
) two
$(\Omega,\mathcal{F},\mathbb{P})$
) two
 $\mathbb{R}^{m}$
-valued independent separable Lévy bases
$\mathbb{R}^{m}$
-valued independent separable Lévy bases
 $\Lambda_{\alpha}^{+}$
and
$\Lambda_{\alpha}^{+}$
and
 $\Lambda_{\alpha}^{-}$
fulfilling the following: they are strictly
$\Lambda_{\alpha}^{-}$
fulfilling the following: they are strictly
 $\alpha$
-stable, independent of
$\alpha$
-stable, independent of
 $\mathcal{F}$
, and their control measures are
$\mathcal{F}$
, and their control measures are
 $\mu^{+}_{M,A}$
and
$\mu^{+}_{M,A}$
and
 $\mu^{-}_{M,A}$
, respectively. Additionally, their seed satisfies the following:
$\mu^{-}_{M,A}$
, respectively. Additionally, their seed satisfies the following:
-
(i) If
$\alpha=2$
, it has covariance
$\Sigma$
. -
(ii) If
$1<\alpha<2$
, its spectral measure is
$\bar{\lambda}({{\mathrm{d}}} u)=\alpha K(u)\lambda({{\mathrm{d}}} u)$
.




Finally, we let
 \begin{equation}Y^{\alpha}(t,f)\,:\!=\, \int_{(0,t]\times N(A)}G(t,f,s,x,n)\cdot \big[\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))\big].\end{equation}
\begin{equation}Y^{\alpha}(t,f)\,:\!=\, \int_{(0,t]\times N(A)}G(t,f,s,x,n)\cdot \big[\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))\big].\end{equation}
Under the above notation, we have the following.
Theorem 3.1. Let Assumption
 ${\mathbf{A}}_\alpha$
hold for some
${\mathbf{A}}_\alpha$
hold for some
 $1<\alpha\leq2$
and consider X as in (3.2). Suppose in addition that A is a compact gentle set. Then, for all
$1<\alpha\leq2$
and consider X as in (3.2). Suppose in addition that A is a compact gentle set. Then, for all
 $\phi\in C_{\beta}^{2}$
, as
$\phi\in C_{\beta}^{2}$
, as
 $r\downarrow0$
,
$r\downarrow0$
,
 \[r^{-1/\alpha}Z^{\phi,r}(t,f)\overset{\textit{$\mathcal{F}$-fd}}{\longrightarrow}\sum_{i,j=1}^{d}D\phi(X(p_{0}))^{(i,j)}Y^{\alpha}(t,\mathbf{e}_{j}\otimes\mathbf{e}_{i}\,f).\]
\[r^{-1/\alpha}Z^{\phi,r}(t,f)\overset{\textit{$\mathcal{F}$-fd}}{\longrightarrow}\sum_{i,j=1}^{d}D\phi(X(p_{0}))^{(i,j)}Y^{\alpha}(t,\mathbf{e}_{j}\otimes\mathbf{e}_{i}\,f).\]
Here
 $D\phi$
denotes the Jacobian of
$D\phi$
denotes the Jacobian of
 $\phi$
,
$\phi$
,
 $\mathbf{e}_{j}$
is the jth element of the canonical basis of
$\mathbf{e}_{j}$
is the jth element of the canonical basis of
 $\mathbb{R}^{d}$
, and
$\mathbb{R}^{d}$
, and
 $\mathbf{e}_{j}\otimes\mathbf{e}_{i}$
represents the outer product between these two vectors.
$\mathbf{e}_{j}\otimes\mathbf{e}_{i}$
represents the outer product between these two vectors.
The finite variation case substantially differs from the above framework, as follows.
Theorem 3.2. Let X be defined as in (3.2) and assume that
 $\Sigma=0$
and
$\Sigma=0$
and
 $\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<+\infty.$
Suppose in addition that A is a compact gentle set. Then, for all
$\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<+\infty.$
Suppose in addition that A is a compact gentle set. Then, for all
 $\phi\in C_{\beta}^{2}$
,
$\phi\in C_{\beta}^{2}$
,
 $t\geq0$
, and
$t\geq0$
, and
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, as
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, as
 $r\downarrow0$
,
$r\downarrow0$
,
 \[\dfrac{1}{r}Z^{\phi,r}(t,f)\overset{\mathbb{P}}{\rightarrow}t\sum_{i,j=1}^{d}D\phi(X(p_{0}))^{(i,j)}\mathcal{D}_{X}^{(i,j)}(\,f,p_{0}),\]
\[\dfrac{1}{r}Z^{\phi,r}(t,f)\overset{\mathbb{P}}{\rightarrow}t\sum_{i,j=1}^{d}D\phi(X(p_{0}))^{(i,j)}\mathcal{D}_{X}^{(i,j)}(\,f,p_{0}),\]
where
 \[\mathcal{D}_{X}^{(i,j)}(\,f,p_{0})\,:\!=\, \int_{M}f(y)^{\prime}\mathbf{e}_{i}\otimes\mathbf{e}_{j}DX(p_{0})y\mathcal{H}^{d-1}({{\mathrm{d}}} y),\]
\[\mathcal{D}_{X}^{(i,j)}(\,f,p_{0})\,:\!=\, \int_{M}f(y)^{\prime}\mathbf{e}_{i}\otimes\mathbf{e}_{j}DX(p_{0})y\mathcal{H}^{d-1}({{\mathrm{d}}} y),\]
in which for
 $i,k=1,\ldots,d,$
and
$i,k=1,\ldots,d,$
and
 $\gamma_{0}=\gamma-\int_{\|x\|\leq 1}x\nu({{\mathrm{d}}} x)$
, we have let
$\gamma_{0}=\gamma-\int_{\|x\|\leq 1}x\nu({{\mathrm{d}}} x)$
, we have let
 \begin{equation}DX(p)^{(i,k)}=\sum_{j=1}^{m}\int_{A+p} \partial_{k+d}F^{(i,j)}(p,q) \gamma_0^{(i)} \,{{\mathrm{d}}} q + \int_{A+p}\partial_{k}F^{(i,j)}(p,q)L^{(j)}({{\mathrm{d}}} q).\end{equation}
\begin{equation}DX(p)^{(i,k)}=\sum_{j=1}^{m}\int_{A+p} \partial_{k+d}F^{(i,j)}(p,q) \gamma_0^{(i)} \,{{\mathrm{d}}} q + \int_{A+p}\partial_{k}F^{(i,j)}(p,q)L^{(j)}({{\mathrm{d}}} q).\end{equation}
Remark 3.2. The following remarks are in order.
-
(i) As mentioned above,
$Z^{\phi,r}(t,f)$
can be seen as the average of the increments
$\phi(X(p_0+r\,t\,y))-\phi(X(p_0))$
over M. Therefore, in the terminology of [Reference Falconer10], the limits appearing in Theorems 3.1 and 3.2 can be seen as the average over M of all the tangent fields around
$p_0$
of the field
$\phi(X({\cdot}))$
. In fact, our techniques show that if the assumptions of Theorem 3.1 hold, then the sequence converges stably in distribution towards
\[r^{-1/\alpha}[\phi(X(p_0+r\,t\,y))-\phi(X(p_0))]\]
where
\[D\phi(X(p_{0}))\int_{(0,t]\times N(A)}F(p_0,x) \big[\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n)) \big],\]
$\Lambda_{\alpha}^{\pm}$
as above but we replace M with
$\{y\}$
. A similar result holds under the set-up of Theorem 3.2.
-
(ii) Note that
$Y^{\alpha}$
is degenerated when
$F(p_{0},\cdot+p_0)$
vanishes in
$\partial A$
, for example when
$\partial A=\mathbb{S}^{d-1}$
and
$F(p,q)=(1-\|p-q\|^2)G(p,q)$
, for some vector-valued function G. In fact, by looking at the proof of Theorem 3.1, in this situation and as long as A is gentle, the conclusion of Theorem 3.2 remains valid if we replace
$\gamma_{0}$
with
$\gamma$
in (3.7). This result is valid independently of whether Assumption
${\mathbf{A}}_\alpha$
is satisfied. -
(iii) There are other special situations in which Theorem 3.2 can be extended (irrespective of the behaviour of
$F(p_{0},\cdot)$
in
$\partial A$
) in the infinite variation case. For instance, if
$\phi(x)=x$
and L is strictly 1-stable with spectral measure
$\lambda$
and drift
$\gamma$
, our methods show that where
\[\dfrac{1}{r}Z^{\phi,r}(t,f)\overset{\textit{$\mathcal{F}$-fd}}{\longrightarrow}\sum_{i}Y^{1} \big(t,f^{i}\mathbf{e}_{i} \big)+t\mathcal{D}_{X}^{(i,i)}(p_{0}),\]
$Y^{1}$
is defined in the same way as
$Y^\alpha$
but with
$\Lambda_{\alpha}^{+}$
and
$\Lambda_{\alpha}^{-}$
replaced by non-trivial strictly 1-stable Lévy bases with spectral measure
$\lambda$
and drift
$\gamma$
.




























3.2. Processes induced by energy fluxes
In this subsection, we study some probabilistic properties of the class of processes induced by the limit of energy fluxes of the form of (3.1). We start by describing the local behaviour of the energy flux associated with X. In light of the relation
 $\mathscr{E}_{rt}=(rt)^{d-1}Z^{\phi,r}(t,u_{M})$
, we deduce the following result from Theorems 3.1 and 3.2 and the classical Divergence Theorem.
$\mathscr{E}_{rt}=(rt)^{d-1}Z^{\phi,r}(t,u_{M})$
, we deduce the following result from Theorems 3.1 and 3.2 and the classical Divergence Theorem.
Corollary 3.1. Let X be as in (3.2), where A is a compact gentle set. Then, for every
 $\phi\in C_{\beta}^{2}$
, the following holds.
$\phi\in C_{\beta}^{2}$
, the following holds.
-
(i) Under Assumption
${\mathbf{A}}_\alpha$
, as
$r\downarrow0$
,
\[\dfrac{1}{r^{d-{(\alpha-1)}/{\alpha}}}\mathscr{E}_{rt}\overset{\textit{$\mathcal{F}$-fd}}{\longrightarrow}t^{d-1}\sum_{i,j=1}^{d}D\phi(X(p_{0}))^{(i,j)}Y^{\alpha}(t,\mathbf{e}_{j}\otimes\mathbf{e}_{i}u_{M}).\]
-
(ii) If
$\Sigma=0$
and
$\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<+\infty$
, then, as
$r\downarrow0$
,
\[\dfrac{1}{\mathrm{Leb}(r\mathfrak{D})}\mathscr{E}_{rt}\overset{\mathbb{P}}{\rightarrow}t^{d}\sum_{i,j=1}^{d}D\phi(X(p_{0}))^{(i,j)}DX(p_{0})^{(j,i)}.\]







It is clear that the nature of the limit processes appearing in the above result can be described solely by the process
 $(Y^{\alpha}(t,\mathbf{e}_{j} \otimes \mathbf{e}_{i}u_{M}))_{t\geq0}$
. For instance, using the spectral representation (3.6) of
$(Y^{\alpha}(t,\mathbf{e}_{j} \otimes \mathbf{e}_{i}u_{M}))_{t\geq0}$
. For instance, using the spectral representation (3.6) of
 $Y^{\alpha}$
together with its independence from
$Y^{\alpha}$
together with its independence from
 $\mathcal{F}$
, we easily deduce that the limit processes in Corollary 3.1 are self-similar of index
$\mathcal{F}$
, we easily deduce that the limit processes in Corollary 3.1 are self-similar of index
 $d-{(\alpha-1)}/{\alpha}$
and d, respectively. Therefore, for the rest of this section, we focus on studying the process
$d-{(\alpha-1)}/{\alpha}$
and d, respectively. Therefore, for the rest of this section, we focus on studying the process
 $(Y^{\alpha} (t,\mathbf{e}_{j} \otimes \mathbf{e}_{i}u_{M}))_{t\geq0}$
. For notational convenience, from now on we will write
$(Y^{\alpha} (t,\mathbf{e}_{j} \otimes \mathbf{e}_{i}u_{M}))_{t\geq0}$
. For notational convenience, from now on we will write
 $Y_{t}^{\alpha}$
instead of
$Y_{t}^{\alpha}$
instead of
 $Y^{\alpha} (t, \mathbf{e}_{j} \otimes \mathbf{e}_{i} u_{M})$
.
$Y^{\alpha} (t, \mathbf{e}_{j} \otimes \mathbf{e}_{i} u_{M})$
.
Our next goal is to describe the path properties of
 $Y^{\alpha}$
when M is an affine transformation of the sphere of the form
$Y^{\alpha}$
when M is an affine transformation of the sphere of the form
 \begin{equation}M=T\mathbb{S}^{d-1},\end{equation}
\begin{equation}M=T\mathbb{S}^{d-1},\end{equation}
in which T is an invertible
 $d\times d$
matrix. Note that by self-similarity
$d\times d$
matrix. Note that by self-similarity
 $Y^{\alpha}$
cannot be differentiable at 0 unless it is identically zero (see Remark 3.2). Surprisingly, however, the paths of
$Y^{\alpha}$
cannot be differentiable at 0 unless it is identically zero (see Remark 3.2). Surprisingly, however, the paths of
 $Y^{\alpha}$
are typically absolutely continuous. These findings are described in the next result, in which we will use the following notation:
$Y^{\alpha}$
are typically absolutely continuous. These findings are described in the next result, in which we will use the following notation:
 \[\mathfrak{H}(\ell,n)\,:\!=\, \big\{y\in\mathbb{R}^{d}\,\colon y\cdot n=\ell \big\},\quad n\in\mathbb{S}^{d-1},\;\ell\in\mathbb{R},\]
\[\mathfrak{H}(\ell,n)\,:\!=\, \big\{y\in\mathbb{R}^{d}\,\colon y\cdot n=\ell \big\},\quad n\in\mathbb{S}^{d-1},\;\ell\in\mathbb{R},\]
and
 \[\varphi(\rho)\,:\!=\, \big(1-\rho^{2} \big)^{{(d-1)}/{2}} ,\quad -1\leq\rho\leq1.\]
\[\varphi(\rho)\,:\!=\, \big(1-\rho^{2} \big)^{{(d-1)}/{2}} ,\quad -1\leq\rho\leq1.\]
Theorem 3.3. Let M be as in (3.8). Then, for all
 $1<\alpha<2$
, the process
$1<\alpha<2$
, the process
 $(Y_{t}^{\alpha})_{t\geq0}$
admits a modification that has absolutely continuous paths almost surely with derivative
$(Y_{t}^{\alpha})_{t\geq0}$
admits a modification that has absolutely continuous paths almost surely with derivative
 \[\dfrac{{{\mathrm{d}}} Y_{t}^{\alpha}}{{{\mathrm{d}}} t}=\int_{(0,t]\times N(A)}g(t,s,x,n)\cdot \big(\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))\big),\]
\[\dfrac{{{\mathrm{d}}} Y_{t}^{\alpha}}{{{\mathrm{d}}} t}=\int_{(0,t]\times N(A)}g(t,s,x,n)\cdot \big(\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))\big),\]
where
 \[g(t,s,x,n)\,:\!=\, \partial_{t}\varphi(s/t)(n\cdot\mathbf{e}_{i})\,\mathbf{e}_{j}^{\prime}F(p_{0},x)\mathcal{H}^{d-1}\big(T\big(D_{1}\cap\upsilon(n)^{\perp}\big)\big),\quad s\leq t,\]
\[g(t,s,x,n)\,:\!=\, \partial_{t}\varphi(s/t)(n\cdot\mathbf{e}_{i})\,\mathbf{e}_{j}^{\prime}F(p_{0},x)\mathcal{H}^{d-1}\big(T\big(D_{1}\cap\upsilon(n)^{\perp}\big)\big),\quad s\leq t,\]
in which
 $\upsilon(n)\,:\!=\, T^{\prime}n/\lVert T^{\prime}n\rVert$
,
$\upsilon(n)\,:\!=\, T^{\prime}n/\lVert T^{\prime}n\rVert$
,
 $\upsilon(n)^{\perp}=\mathfrak{H}(0,\upsilon(n))$
and
$\upsilon(n)^{\perp}=\mathfrak{H}(0,\upsilon(n))$
and
 $D_{1}$
is the unit open disk. If
$D_{1}$
is the unit open disk. If
 $d\geq3$
, then the same result holds for
$d\geq3$
, then the same result holds for
 $\alpha=2$
.
$\alpha=2$
.
Proof. The proof consists in verifying that for
 $\mu^{\pm}_{M,A}$
-a.e.
$\mu^{\pm}_{M,A}$
-a.e.
 $(s,x,n)\in\mathbb{R}^{+} \times \mathbb{R}^{d} \times \mathbb{S}^{d-1}$
,
$(s,x,n)\in\mathbb{R}^{+} \times \mathbb{R}^{d} \times \mathbb{S}^{d-1}$
,
 \begin{equation}\int_{s}^{t}g(z,s,x,n) \,{{\mathrm{d}}} z = G(t, \mathbf{e}_{j} \otimes \mathbf {e}_{i}u_{M},s,x,n), \end{equation}
\begin{equation}\int_{s}^{t}g(z,s,x,n) \,{{\mathrm{d}}} z = G(t, \mathbf{e}_{j} \otimes \mathbf {e}_{i}u_{M},s,x,n), \end{equation}
and that the stochastic Fubini theorem can be applied. From (4.33) in Section 4.4 below, we have that for
 $\mu^{\pm}_{M,A}$
-a.e.
$\mu^{\pm}_{M,A}$
-a.e.
 $(s,x,n)\in\mathbb{R}^{+}\times\mathbb{R}^{d}\times\mathbb{S}^{d-1}$
with
$(s,x,n)\in\mathbb{R}^{+}\times\mathbb{R}^{d}\times\mathbb{S}^{d-1}$
with
 $0<s<t$
and
$0<s<t$
and
 $h_{M}(n)>0$
, it holds that
$h_{M}(n)>0$
, it holds that
 \begin{equation}G(t,\mathbf{e}_{j} \otimes \mathbf{e}_{i}u_{M},s,x,n) = (n\cdot\mathbf{e}_{i}) \mathbf{e}_{j}^{\prime} F(p_{0},x)\mathcal{H}^{d-1}(\mathfrak{D} \cap \mathfrak{H}(h_{M}(n)s/t , n)). \end{equation}
\begin{equation}G(t,\mathbf{e}_{j} \otimes \mathbf{e}_{i}u_{M},s,x,n) = (n\cdot\mathbf{e}_{i}) \mathbf{e}_{j}^{\prime} F(p_{0},x)\mathcal{H}^{d-1}(\mathfrak{D} \cap \mathfrak{H}(h_{M}(n)s/t , n)). \end{equation}
In what follows, we fix such (s, x, n). Using
 $h_M(n)=\lVert T^{\prime}n\rVert$
, it follows easily that
$h_M(n)=\lVert T^{\prime}n\rVert$
, it follows easily that
 \[\mathfrak{D}\cap\mathfrak{H}(h_{M}(n)s/t,n)=T(D_{1}\cap\mathfrak{H}(s/t,\upsilon(n))).\]
\[\mathfrak{D}\cap\mathfrak{H}(h_{M}(n)s/t,n)=T(D_{1}\cap\mathfrak{H}(s/t,\upsilon(n))).\]
Since
 $D_{1}\cap\mathfrak{H}(s/t,\upsilon(n))$
is a
$D_{1}\cap\mathfrak{H}(s/t,\upsilon(n))$
is a
 $(d-1)$
-dimensional open disk with radius
$(d-1)$
-dimensional open disk with radius
 $\sqrt{1-(s/t)^{2}}$
lying in
$\sqrt{1-(s/t)^{2}}$
lying in
 $\mathfrak{H}(s/t,\upsilon(n))$
, it can be parametrised as
$\mathfrak{H}(s/t,\upsilon(n))$
, it can be parametrised as
 \[\varpi(z)=\sqrt{1-(s/t)^{2}}Tz+\dfrac{s}{t}\upsilon(n),\quad z\in\mathbb{S}^{d-1}\cap\upsilon(n)^{\perp}.\]
\[\varpi(z)=\sqrt{1-(s/t)^{2}}Tz+\dfrac{s}{t}\upsilon(n),\quad z\in\mathbb{S}^{d-1}\cap\upsilon(n)^{\perp}.\]
Furthermore, given that
 $\mathbb{S}^{d-1}\cap\upsilon(n)^{\perp}$
is a
$\mathbb{S}^{d-1}\cap\upsilon(n)^{\perp}$
is a
 $(d-2)$
-dimensional sphere embedded in
$(d-2)$
-dimensional sphere embedded in
 $\upsilon(n)^{\perp}$
, we can apply the Area Formula (see e.g. Section 3.3 in [Reference Evans and Gariepy9]) to deduce that
$\upsilon(n)^{\perp}$
, we can apply the Area Formula (see e.g. Section 3.3 in [Reference Evans and Gariepy9]) to deduce that
 \begin{equation}\mathcal{H}^{d-1} (\mathfrak{D}\cap\mathfrak{H}(h_{M}(n)s/t,n)) = \varphi(s/t)\mathcal{H}^{d-1}\big(T\big(D_{1}\cap\upsilon(n)^{\perp}\big)\big). \end{equation}
\begin{equation}\mathcal{H}^{d-1} (\mathfrak{D}\cap\mathfrak{H}(h_{M}(n)s/t,n)) = \varphi(s/t)\mathcal{H}^{d-1}\big(T\big(D_{1}\cap\upsilon(n)^{\perp}\big)\big). \end{equation}
Equation (3.9) now follows easily from (3.10) and (3.11). Note that the former implies that for all
 $t>0$
, almost surely
$t>0$
, almost surely
 \begin{equation}Y_{t}^{\alpha}=\int_{(0,t]\times N(A)}\int_{s}^{t}g(z,s,x,n)\,{{\mathrm{d}}} z\cdot \big[\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))\big].\end{equation}
\begin{equation}Y_{t}^{\alpha}=\int_{(0,t]\times N(A)}\int_{s}^{t}g(z,s,x,n)\,{{\mathrm{d}}} z\cdot \big[\Lambda_{\alpha}^{+}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))-\Lambda_{\alpha}^{-}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n))\big].\end{equation}
Therefore, in order to finish the proof, we need to verify that the stochastic Fubini theorem can be applied for all
 $1<\alpha<2$
, and for
$1<\alpha<2$
, and for
 $\alpha=2$
if
$\alpha=2$
if
 $d\geq3$
. To do so, we aim to apply Theorem 3.1 in [Reference Barndorff-Nielsen and Basse-O’Connor2]. Such a result, adjusted to our situation, reads as follows. For
$d\geq3$
. To do so, we aim to apply Theorem 3.1 in [Reference Barndorff-Nielsen and Basse-O’Connor2]. Such a result, adjusted to our situation, reads as follows. For
 $1<\alpha\leq2$
, let
$1<\alpha\leq2$
, let
 $\Upsilon$
be a separable one-dimensional strictly
$\Upsilon$
be a separable one-dimensional strictly
 $\alpha$
-stable Lévy basis on
$\alpha$
-stable Lévy basis on
 $\mathcal{S}\subseteq {\mathbb{R}}^K$
with
$\mathcal{S}\subseteq {\mathbb{R}}^K$
with
 $\sigma$
-finite control measure
$\sigma$
-finite control measure
 $\mu$
as described in Section 2.1. In this circumstance, the function
$\mu$
as described in Section 2.1. In this circumstance, the function
 $\phi(y,s)$
defined in page 925 in [Reference Barndorff-Nielsen and Basse-O’Connor2] does not depend on s and equals
$\phi(y,s)$
defined in page 925 in [Reference Barndorff-Nielsen and Basse-O’Connor2] does not depend on s and equals
 $c_\alpha\rvert y\rvert^\alpha$
, for some constant
$c_\alpha\rvert y\rvert^\alpha$
, for some constant
 $c_\alpha>0$
. In particular,
$c_\alpha>0$
. In particular,
 \[\rVert g \rVert_\alpha=\inf\biggl\{w>0\,\colon \int_{\mathcal{S}} \phi (g(q)/w)\mu({{\mathrm{d}}} q)\leq1 \biggr\}=c^{1/\alpha}_{\alpha}\biggl(\int_{\mathcal{S}}\rvert g(q)\rvert^{\alpha}\mu({{\mathrm{d}}} q)\biggr)^{1/\alpha},\]
\[\rVert g \rVert_\alpha=\inf\biggl\{w>0\,\colon \int_{\mathcal{S}} \phi (g(q)/w)\mu({{\mathrm{d}}} q)\leq1 \biggr\}=c^{1/\alpha}_{\alpha}\biggl(\int_{\mathcal{S}}\rvert g(q)\rvert^{\alpha}\mu({{\mathrm{d}}} q)\biggr)^{1/\alpha},\]
where g is an arbitrary measurable function. Therefore, according to Theorem 3.1 in [Reference Barndorff-Nielsen and Basse-O’Connor2], if
 $f\,\colon {\mathbb{R}}^+\times\mathcal{S}\to{\mathbb{R}}$
is a measurable function such that
$f\,\colon {\mathbb{R}}^+\times\mathcal{S}\to{\mathbb{R}}$
is a measurable function such that
 \begin{equation}\begin{split} & \textrm{(i)} \quad \int_{\mathcal{S}}\rvert f(z,q)\rvert^{\alpha}\mu({{\mathrm{d}}} q)<\infty\quad\text{for every $z\geq0$}, \\ & \text{(ii)}\quad \int_0^\infty\biggl(\int_{\mathcal{S}}\rvert f(z,q)\rvert^{\alpha}\mu({{\mathrm{d}}} q)\biggr)^{1/\alpha}\,{{\mathrm{d}}} z<\infty,\end{split}\end{equation}
\begin{equation}\begin{split} & \textrm{(i)} \quad \int_{\mathcal{S}}\rvert f(z,q)\rvert^{\alpha}\mu({{\mathrm{d}}} q)<\infty\quad\text{for every $z\geq0$}, \\ & \text{(ii)}\quad \int_0^\infty\biggl(\int_{\mathcal{S}}\rvert f(z,q)\rvert^{\alpha}\mu({{\mathrm{d}}} q)\biggr)^{1/\alpha}\,{{\mathrm{d}}} z<\infty,\end{split}\end{equation}
then
 \[\int_0^\infty\biggl[\int_{\mathcal{S}}f(z,q)\Upsilon({{\mathrm{d}}} q)\biggr]\,{{\mathrm{d}}} z=\int_{\mathcal{S}}\biggl[\int_0^\infty f(z,q)\,{{\mathrm{d}}} z\biggr]\Upsilon({{\mathrm{d}}} q),\]
\[\int_0^\infty\biggl[\int_{\mathcal{S}}f(z,q)\Upsilon({{\mathrm{d}}} q)\biggr]\,{{\mathrm{d}}} z=\int_{\mathcal{S}}\biggl[\int_0^\infty f(z,q)\,{{\mathrm{d}}} z\biggr]\Upsilon({{\mathrm{d}}} q),\]
in the sense that both integrals exist and are equal almost surely. Returning to our proof, note that by the Lévy–Khintchine representation, each entry of
 $\Lambda_{\alpha}^{\pm}$
is a separable one-dimensional strictly
$\Lambda_{\alpha}^{\pm}$
is a separable one-dimensional strictly
 $\alpha$
-stable Lévy basis with control measure
$\alpha$
-stable Lévy basis with control measure
 $\mu^{\pm}_{M,A}$
. As a consequence of this, (2.6), and (3.13), we can swap the order of integration in (3.12) whenever
$\mu^{\pm}_{M,A}$
. As a consequence of this, (2.6), and (3.13), we can swap the order of integration in (3.12) whenever
 \begin{align} &\int_{(0,z] \times N(A)}\| g(z,s,x,n) \|^{\alpha}\mu^{\pm}_{M,A}({{\mathrm{d}}} s \,{{\mathrm{d}}} (x,n))<\infty \quad \text{for all $ z\geq0$,} \\[-9pt] \nonumber \end{align}
\begin{align} &\int_{(0,z] \times N(A)}\| g(z,s,x,n) \|^{\alpha}\mu^{\pm}_{M,A}({{\mathrm{d}}} s \,{{\mathrm{d}}} (x,n))<\infty \quad \text{for all $ z\geq0$,} \\[-9pt] \nonumber \end{align}
 \begin{align} &\int_{0}^{t} \biggl(\int_{(0,z] \times N(A)}\| g(z,s,x,n) \|^{\alpha}\mu^{\pm}_{M,A}({{\mathrm{d}}} s \,{{\mathrm{d}}} (x,n)) \biggr)^{1/\alpha} \,{{\mathrm{d}}} z<\infty. \\[9pt] \nonumber \end{align}
\begin{align} &\int_{0}^{t} \biggl(\int_{(0,z] \times N(A)}\| g(z,s,x,n) \|^{\alpha}\mu^{\pm}_{M,A}({{\mathrm{d}}} s \,{{\mathrm{d}}} (x,n)) \biggr)^{1/\alpha} \,{{\mathrm{d}}} z<\infty. \\[9pt] \nonumber \end{align}
This is easily obtained by noting that the integral in (3.14) equals
 \[C\times z^{1-\alpha}\int_{0}^{1}|\varphi^{\prime}(y)y|^{\alpha}\,{{\mathrm{d}}} y,\]
\[C\times z^{1-\alpha}\int_{0}^{1}|\varphi^{\prime}(y)y|^{\alpha}\,{{\mathrm{d}}} y,\]
where, due to the continuity of F and the compactness of the sphere, the constant C is given by
 \[\int_{\partial A}\|(n_{A}(x)\cdot\mathbf{e}_{i})\,\mathbf{e}_{j}^{\prime}F(p_{0},x)\mathcal{H}^{d-1}\big(T\big(D_{1}\cap\upsilon(n_{A}(x))^{\perp}\big)\big)\|^{\alpha}\lVert T^{\prime}n_{A}(x)\rVert\mathcal{H}^{d-1}({{\mathrm{d}}} x)<\infty.\]
\[\int_{\partial A}\|(n_{A}(x)\cdot\mathbf{e}_{i})\,\mathbf{e}_{j}^{\prime}F(p_{0},x)\mathcal{H}^{d-1}\big(T\big(D_{1}\cap\upsilon(n_{A}(x))^{\perp}\big)\big)\|^{\alpha}\lVert T^{\prime}n_{A}(x)\rVert\mathcal{H}^{d-1}({{\mathrm{d}}} x)<\infty.\]
Thus (3.14) and (3.15) hold if and only if either
 $1<\alpha<2$
and
$1<\alpha<2$
and
 $d\geq2$
or
$d\geq2$
or
 $\alpha=2$
and
$\alpha=2$
and
 $d\geq 3$
.
$d\geq 3$
.
4. Proofs
Recall that we are assuming that L is a homogeneous Lévy basis. For the rest of this section we will denote its characteristic triplet as
 $(\gamma,\Sigma,\nu)$
and its characteristic exponent as
$(\gamma,\Sigma,\nu)$
and its characteristic exponent as
 $\psi$
. The non-random positive constants will be denoted by the generic symbol
$\psi$
. The non-random positive constants will be denoted by the generic symbol
 $C>0$
, and they may change from line to line. If
$C>0$
, and they may change from line to line. If
 $A,B\subseteq\mathbb{R}^{d}$
, we set
$A,B\subseteq\mathbb{R}^{d}$
, we set
 \[A\oplus B=\{x+y\,\colon x\in A,y\in B\}\]
\[A\oplus B=\{x+y\,\colon x\in A,y\in B\}\]
and
 \[A\ominus B=\{x\in\mathbb{R}^{d}\,\colon x-B\subseteq A\}.\]
\[A\ominus B=\{x\in\mathbb{R}^{d}\,\colon x-B\subseteq A\}.\]
Let
 $D_{1}$
be the unit disk in
$D_{1}$
be the unit disk in
 $\mathbb{R}^{m}$
. We will assume without loss of generality that
$\mathbb{R}^{m}$
. We will assume without loss of generality that
 $M\subseteq D_{1}$
. The following fact, which is a straightforward extension of Proposition 2.6 in [Reference Rajput and Rosiński33], will be constantly used in our proofs: if
$M\subseteq D_{1}$
. The following fact, which is a straightforward extension of Proposition 2.6 in [Reference Rajput and Rosiński33], will be constantly used in our proofs: if
 $f\,\colon \mathbb{R}^{d} \rightarrow \mathbb{R}^{N\times m}$
is integrable with respect to L, then the characteristic exponent of the infinitely divisible random vector
$f\,\colon \mathbb{R}^{d} \rightarrow \mathbb{R}^{N\times m}$
is integrable with respect to L, then the characteristic exponent of the infinitely divisible random vector
 $\xi = \int_{\mathbb{R}^{d}} f(q) L({{\mathrm{d}}} q) $
is given and denoted by
$\xi = \int_{\mathbb{R}^{d}} f(q) L({{\mathrm{d}}} q) $
is given and denoted by
 \begin{equation}\mathcal{C}(z\ddagger\xi)\,:\!=\, \log\mathbb{E}({\kern-1.5pt}\exp(\mathbf{i}z\cdot\xi))=\int_{\mathbb{R}^{d}}\psi(z^{\prime}f(q))\,{{\mathrm{d}}} q,\quad z\in\mathbb{R}^{N}.\end{equation}
\begin{equation}\mathcal{C}(z\ddagger\xi)\,:\!=\, \log\mathbb{E}({\kern-1.5pt}\exp(\mathbf{i}z\cdot\xi))=\int_{\mathbb{R}^{d}}\psi(z^{\prime}f(q))\,{{\mathrm{d}}} q,\quad z\in\mathbb{R}^{N}.\end{equation}
Note that we follow the notation introduced by Ole E. Barndorff-Nielsen. Now, thanks to the Lévy–Itô decomposition for Lévy bases (see [Reference Pedersen29], cf. [Reference Rosińki36]), we may and do assume that the random field defined in (3.2) admits the representation
 \begin{align}X(p) &=\int_{A+p}F(p,q)\gamma\,{{\mathrm{d}}} q+\int_{A+p}F(p,q)W({{\mathrm{d}}} q)\notag \\&\quad +\int_{A+p}F(p,q)J_{S}({{\mathrm{d}}} q)+\int_{A+p}F(p,q)J_{B}({{\mathrm{d}}} q)\notag \\& \,=\!:\, X^{(1)}(p)+X^{(2)}(p)+X^{(3)}(p)+X^{(4)}(p),\end{align}
\begin{align}X(p) &=\int_{A+p}F(p,q)\gamma\,{{\mathrm{d}}} q+\int_{A+p}F(p,q)W({{\mathrm{d}}} q)\notag \\&\quad +\int_{A+p}F(p,q)J_{S}({{\mathrm{d}}} q)+\int_{A+p}F(p,q)J_{B}({{\mathrm{d}}} q)\notag \\& \,=\!:\, X^{(1)}(p)+X^{(2)}(p)+X^{(3)}(p)+X^{(4)}(p),\end{align}
where
 $\gamma\in\mathbb{R}^{m}$
, W,
$\gamma\in\mathbb{R}^{m}$
, W,
 $J_{S}$
, and
$J_{S}$
, and
 $J_{B}$
are independent
$J_{B}$
are independent
 $\mathbb{R}^{m}$
-valued homogeneous Lévy bases with characteristic triples
$\mathbb{R}^{m}$
-valued homogeneous Lévy bases with characteristic triples
 $(0,\Sigma,0)$
,
$(0,\Sigma,0)$
,
 $(0,0,\nu\downharpoonright_{D_{1}})$
, and
$(0,0,\nu\downharpoonright_{D_{1}})$
, and
 $(0, 0, \nu\downharpoonright_{D_{1}^{c}}) $
, respectively. Here,
$(0, 0, \nu\downharpoonright_{D_{1}^{c}}) $
, respectively. Here,
 $\nu\downharpoonright_{D}$
denotes the restriction of
$\nu\downharpoonright_{D}$
denotes the restriction of
 $\nu$
to D. Moreover,
$\nu$
to D. Moreover,
 $X^{(4)}$
can be written as
$X^{(4)}$
can be written as
 \begin{equation}X^{(4)}(p) = \int_{A+p} \int_{\mathbb{R}^{m}} F(p,q)x \mathbf{1}_{D_{1}^{c}}(x) N({{\mathrm{d}}} q\,{{\mathrm{d}}} x),\end{equation}
\begin{equation}X^{(4)}(p) = \int_{A+p} \int_{\mathbb{R}^{m}} F(p,q)x \mathbf{1}_{D_{1}^{c}}(x) N({{\mathrm{d}}} q\,{{\mathrm{d}}} x),\end{equation}
in which N is a Poisson random measure on
 $\mathbb{R}^{d}\times\mathbb{R}^{m}$
independent of
$\mathbb{R}^{d}\times\mathbb{R}^{m}$
independent of
 $(W,J_{S})$
and with intensity
$(W,J_{S})$
and with intensity
 $\varrho=\mathrm{Leb}\otimes\nu$
. Note that the latter integral is
$\varrho=\mathrm{Leb}\otimes\nu$
. Note that the latter integral is
 $\mathbb{P}$
-a.s. well-defined in the Lebesgue sense. If we also have that
$\mathbb{P}$
-a.s. well-defined in the Lebesgue sense. If we also have that
 $\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} y)<\infty$
, X can be further decomposed as
$\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} y)<\infty$
, X can be further decomposed as
 \begin{align}X(p) &= \int_{A+p}F(p,q)\gamma_{0}\,{{\mathrm{d}}} q+\int_{A+p}F(p,q)W({{\mathrm{d}}} q)+\int_{A+p}\int_{\mathbb{R}^{m}} F(p,q)xN({{\mathrm{d}}} q\,{{\mathrm{d}}} x) \notag \\& \,=\!:\, \tilde{X}^{(1)}(p)+X^{(2)}(p)+X^{(5)}(p),\end{align}
\begin{align}X(p) &= \int_{A+p}F(p,q)\gamma_{0}\,{{\mathrm{d}}} q+\int_{A+p}F(p,q)W({{\mathrm{d}}} q)+\int_{A+p}\int_{\mathbb{R}^{m}} F(p,q)xN({{\mathrm{d}}} q\,{{\mathrm{d}}} x) \notag \\& \,=\!:\, \tilde{X}^{(1)}(p)+X^{(2)}(p)+X^{(5)}(p),\end{align}
where we have let
 $\gamma_{0} = \gamma-\int_{D_{1}} x \nu ({{\mathrm{d}}} x)$
.
$\gamma_{0} = \gamma-\int_{D_{1}} x \nu ({{\mathrm{d}}} x)$
.
4.1. Proof of Proposition 3.1
Proof. Fix
 $p_{0}\in\mathbb{R}^{d}$
and put
$p_{0}\in\mathbb{R}^{d}$
and put
 $H(p,q)\,:\!=\, F(p,q)\mathbf{1}_{A}(q-p)$
. From (4.2), it is enough to show that
$H(p,q)\,:\!=\, F(p,q)\mathbf{1}_{A}(q-p)$
. From (4.2), it is enough to show that
 \begin{equation}\| X^{(4)}(p_{0}+r\,t\,y)\| \leq C\xi_{t,r},\end{equation}
\begin{equation}\| X^{(4)}(p_{0}+r\,t\,y)\| \leq C\xi_{t,r},\end{equation}
for some positive (finite a.s.) random variable
 $\xi_{t,r}$
, and that for all
$\xi_{t,r}$
, and that for all
 $\beta\geq0$
,
$\beta\geq0$
,
 \begin{equation}m_\beta=\mathbb{E} \big(\| X^{(i)}(p_{0}+r\,t\,y)\| ^{\beta}\big)\leq C,\quad i=1,2,3,\end{equation}
\begin{equation}m_\beta=\mathbb{E} \big(\| X^{(i)}(p_{0}+r\,t\,y)\| ^{\beta}\big)\leq C,\quad i=1,2,3,\end{equation}
uniformly on
 $y\in M$
. For simplicity and notational convenience, we set
$y\in M$
. For simplicity and notational convenience, we set
 $p_{0}=0$
for the remainder of the proof. Thus, by letting
$p_{0}=0$
for the remainder of the proof. Thus, by letting
 $g(q,x)\,:\!=\, \mathbf{1}_{A_{\oplus rt}}(q)\| x\| \mathbf{1}_{D_{1}^{c}}(x)$
, we see that (4.5) holds if we set
$g(q,x)\,:\!=\, \mathbf{1}_{A_{\oplus rt}}(q)\| x\| \mathbf{1}_{D_{1}^{c}}(x)$
, we see that (4.5) holds if we set
 \[\xi_{t,r}\,:\!=\, \int_{A_{\oplus rt}}\int_{\mathbb{R}^{m}}g(q,x)N({{\mathrm{d}}} q\,{{\mathrm{d}}} x),\]
\[\xi_{t,r}\,:\!=\, \int_{A_{\oplus rt}}\int_{\mathbb{R}^{m}}g(q,x)N({{\mathrm{d}}} q\,{{\mathrm{d}}} x),\]
because F is continuous and
 $A+r\,t\,y\subseteq A\oplus rtM\subseteq A_{\oplus rt}$
. The
$A+r\,t\,y\subseteq A\oplus rtM\subseteq A_{\oplus rt}$
. The
 $\mathbb{P}$
-a.s. finiteness of
$\mathbb{P}$
-a.s. finiteness of
 $\xi_{t,r}$
follows from the fact that
$\xi_{t,r}$
follows from the fact that
 $\int1\land\| g\| \,{{\mathrm{d}}} \varrho<\infty$
and Lemma 12.13 in [Reference Kallenberg19]. On the other hand, since F is continuous and A compact, it is clear that (4.6) holds for
$\int1\land\| g\| \,{{\mathrm{d}}} \varrho<\infty$
and Lemma 12.13 in [Reference Kallenberg19]. On the other hand, since F is continuous and A compact, it is clear that (4.6) holds for
 $i=1,2$
. Now, given that
$i=1,2$
. Now, given that
 $H(p,\cdot)$
has compact support,
$H(p,\cdot)$
has compact support,
 $X^{(3)}$
has finite moments of all orders and from Corollary 1.2.6 in [Reference Turner44], for every
$X^{(3)}$
has finite moments of all orders and from Corollary 1.2.6 in [Reference Turner44], for every
 $\theta\geq2$
,
$\theta\geq2$
,
 \[m_{\theta}\leq C\int_{A+p}\int_{D_{1}}\big(\| F(p_{0}+r\,t\,y,q)x\| ^{2}\lor\| F(p_{0}+r\,t\,y,q)x\| ^{\theta} \big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q\leq C,\]
\[m_{\theta}\leq C\int_{A+p}\int_{D_{1}}\big(\| F(p_{0}+r\,t\,y,q)x\| ^{2}\lor\| F(p_{0}+r\,t\,y,q)x\| ^{\theta} \big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q\leq C,\]
once again by the continuity of F. This easily implies that (4.6) is also valid for
 $i=3$
.
$i=3$
.
4.2. Proof of Theorems 3.1 and 3.2
Before presenting the proof of Theorems 3.1 and 3.2, let us make some remarks and establish some basic results. First, since
 $A+p_{0}$
is gentle, without loss of generality we may and do assume that
$A+p_{0}$
is gentle, without loss of generality we may and do assume that
 $p_{0}=0$
. If this is not the case, replace X with the ID field
$p_{0}=0$
. If this is not the case, replace X with the ID field
 \[\tilde{X}(p) = \int_{A+p_{0}+p} F(p_{0}+p,q) L({{\mathrm{d}}} q).\]
\[\tilde{X}(p) = \int_{A+p_{0}+p} F(p_{0}+p,q) L({{\mathrm{d}}} q).\]
For
 $t\in\mathbb{R}$
and
$t\in\mathbb{R}$
and
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, define
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, define
 \begin{equation}Y_{r}(t,f)=\int_{M} (X(try)-X(0))\cdot f(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{equation}
\begin{equation}Y_{r}(t,f)=\int_{M} (X(try)-X(0))\cdot f(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{equation}
According to Lemma 4.1 below,
 \begin{equation}Z^{\phi,r}(t,f) = \sum_{i,j}D\phi(X(p_{0}))^{(i,j)}Y_{r}(t,f^{(i)}\mathbf{e}_{j}) + \mathrm{o}_{\mathbb{P}}(1).\end{equation}
\begin{equation}Z^{\phi,r}(t,f) = \sum_{i,j}D\phi(X(p_{0}))^{(i,j)}Y_{r}(t,f^{(i)}\mathbf{e}_{j}) + \mathrm{o}_{\mathbb{P}}(1).\end{equation}
Thus, by the properties of stable convergence, it is enough to show that Theorems 3.1 and 3.2 hold when we replace
 $Z^{\phi,r}$
with
$Z^{\phi,r}$
with
 $Y_{r}$
, i.e. when
$Y_{r}$
, i.e. when
 $\phi(x)=x$
. Furthermore, since
$\phi(x)=x$
. Furthermore, since
 $f\mapsto Y_{t}^{r}(\,f)$
is linear, we only need to verify that the stated convergence holds for
$f\mapsto Y_{t}^{r}(\,f)$
is linear, we only need to verify that the stated convergence holds for
 \[(Y_{r}(t_{1},f),\ldots,Y_{r}(t_{n},f)),\]
\[(Y_{r}(t_{1},f),\ldots,Y_{r}(t_{n},f)),\]
for arbitrary
 $t_{0}\,:\!=\, 0 < t_{1} \leq \cdots \leq t_{n}$
and fixed
$t_{0}\,:\!=\, 0 < t_{1} \leq \cdots \leq t_{n}$
and fixed
 $f\in L^{2}(\mathcal{H}^{d-1} \downharpoonright_{M})$
. Next, set
$f\in L^{2}(\mathcal{H}^{d-1} \downharpoonright_{M})$
. Next, set
 $\theta_{1},\ldots,\theta_{n}\in\mathbb{R}$
and
$\theta_{1},\ldots,\theta_{n}\in\mathbb{R}$
and
 $\mathbf{T}=(t_{1},\cdots, t_{n})$
. The starting point of our analysis is the decomposition
$\mathbf{T}=(t_{1},\cdots, t_{n})$
. The starting point of our analysis is the decomposition
 \begin{equation}\sum_{l=1}^{n}\theta_{l}Y^{r}(t_{l},f)=\Psi_{r}(\mathbf{T},f)+\Xi_{r}(\mathbf{T},f)+\Phi_{r}(\mathbf{T},f),\end{equation}
\begin{equation}\sum_{l=1}^{n}\theta_{l}Y^{r}(t_{l},f)=\Psi_{r}(\mathbf{T},f)+\Xi_{r}(\mathbf{T},f)+\Phi_{r}(\mathbf{T},f),\end{equation}
where
 \begin{equation}\begin{aligned}\Psi_{r}(\mathbf{T},f)& \,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{A\cap(\cap_{k=1}^{n}A\ominus rt_{k}M)}k_{l}^{(1)}(r,q)L({{\mathrm{d}}} q),\\\Xi_{r}(\mathbf{T},f)& \,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}k_{l}^{(2)}(r,q)L({{\mathrm{d}}} q),\\\Phi_{r}(\mathbf{T},f)& \,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{(\cup_{k=1}^{n}A\oplus rt_{k}M)\backslash A}k_{l}^{(3)}(r,q)L({{\mathrm{d}}} q),\end{aligned}\end{equation}
\begin{equation}\begin{aligned}\Psi_{r}(\mathbf{T},f)& \,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{A\cap(\cap_{k=1}^{n}A\ominus rt_{k}M)}k_{l}^{(1)}(r,q)L({{\mathrm{d}}} q),\\\Xi_{r}(\mathbf{T},f)& \,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}k_{l}^{(2)}(r,q)L({{\mathrm{d}}} q),\\\Phi_{r}(\mathbf{T},f)& \,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{(\cup_{k=1}^{n}A\oplus rt_{k}M)\backslash A}k_{l}^{(3)}(r,q)L({{\mathrm{d}}} q),\end{aligned}\end{equation}
in which
 \begin{align*}k_{l}^{(1)}(r,q)&\,:\!=\, \int_{M}f(y)^{\prime}[F(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y),\\k_{l}^{(2)}(r,q)&\,:\!=\, \int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y),\\k_{l}^{(3)}(r,q)&\,:\!=\, \int_{M}f(y)^{\prime}H(rt_{l}y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{align*}
\begin{align*}k_{l}^{(1)}(r,q)&\,:\!=\, \int_{M}f(y)^{\prime}[F(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y),\\k_{l}^{(2)}(r,q)&\,:\!=\, \int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y),\\k_{l}^{(3)}(r,q)&\,:\!=\, \int_{M}f(y)^{\prime}H(rt_{l}y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{align*}
Relation (4.9) can be established as follows.
Proof of (4.9). Let
 \begin{equation}H(p,q)\,:\!=\, F(p,q)\mathbf{1}_{A}(q-p). \end{equation}
\begin{equation}H(p,q)\,:\!=\, F(p,q)\mathbf{1}_{A}(q-p). \end{equation}
The main step consists in showing that the stochastic Fubini theorem can be applied. Suppose for a moment that this is the case. Then, by means of this and (3.3), we have that for every
 $t\geq 0 $
and
$t\geq 0 $
and
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
,
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
,
 \begin{align}Y_{r}(t,f)&=\sum_{j=1}^{m}\sum_{i=1}^{d}\int_{\mathbb{R}^{d}}\int_{M} \big[H^{(i,j)}(r\,t\,y,q)-H^{(i,j)}(0,q) \big]f^{(i)}(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y)L^{(j)}({{\mathrm{d}}} q)\notag \\&=\int_{\mathbb{R}^{d}}\int_{M}f(y)^{\prime}[H(r\,t\,y,q)-H(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\quad \text{$\mathbb{P}$-a.s.}\end{align}
\begin{align}Y_{r}(t,f)&=\sum_{j=1}^{m}\sum_{i=1}^{d}\int_{\mathbb{R}^{d}}\int_{M} \big[H^{(i,j)}(r\,t\,y,q)-H^{(i,j)}(0,q) \big]f^{(i)}(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y)L^{(j)}({{\mathrm{d}}} q)\notag \\&=\int_{\mathbb{R}^{d}}\int_{M}f(y)^{\prime}[H(r\,t\,y,q)-H(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\quad \text{$\mathbb{P}$-a.s.}\end{align}
Furthermore, we have the following:
-
(i) If
$q\in (A\oplus rtM)^c $
, then
$\mathbf{1}_A(q-r\,t\,y)=0$
for all
$y\in M$
. Indeed, if this were not the case, we would have that
$q-r\,t\,y\in A$
, implying that
$q=(q-r\,t\,y)+r\,t\,y\in A\oplus rtM$
, which is absurd. -
(ii) In contrast, by definition, if
$q\in (A\ominus rtM) $
, then
$\mathbf{1}_A(q-r\,t\,y)=1$
for all
$y\in M$
.








All the above observations result in
 \begin{align*}\sum_{l=1}^{n}\theta_{l}Y_{r}(t_{l},f)&=\sum_{l=1}^{n}\theta_{l}\int_{A}\int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&\quad +\sum_{l=1}^{n}\theta_{l}\int_{A^{c}}\int_{M}f(y)^{\prime}H(rt_{l}y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&=\sum_{l=1}^{n}\theta_{l}\int_{A\cap(\cap_{k=1}^{n}A\ominus rt_{k}M)}\int_{M}f(y)^{\prime}[F(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&\quad +\sum_{l=1}^{n}\theta_{l}\int_{A\cap(\cap_{k=1}^{n}A\ominus rt_{k}M)^{c}}\int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&\quad +\sum_{l=1}^{n}\theta_{l}\int_{A^{c}\cap(\cup_{k=1}^{n}A\oplus rt_{k}M)}\int_{M}f(y)^{\prime}H(rt_{l}y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q),\end{align*}
\begin{align*}\sum_{l=1}^{n}\theta_{l}Y_{r}(t_{l},f)&=\sum_{l=1}^{n}\theta_{l}\int_{A}\int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&\quad +\sum_{l=1}^{n}\theta_{l}\int_{A^{c}}\int_{M}f(y)^{\prime}H(rt_{l}y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&=\sum_{l=1}^{n}\theta_{l}\int_{A\cap(\cap_{k=1}^{n}A\ominus rt_{k}M)}\int_{M}f(y)^{\prime}[F(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&\quad +\sum_{l=1}^{n}\theta_{l}\int_{A\cap(\cap_{k=1}^{n}A\ominus rt_{k}M)^{c}}\int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\\&\quad +\sum_{l=1}^{n}\theta_{l}\int_{A^{c}\cap(\cup_{k=1}^{n}A\oplus rt_{k}M)}\int_{M}f(y)^{\prime}H(rt_{l}y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q),\end{align*}
which is exactly (4.9).
To complete our argument, it remains to justify the use of the stochastic Fubini theorem in (4.12). First, by the Lévy–Khintchine representation (2.2) (see Proposition 11.10 in [Reference Sato39]),
 $L^{(j)}$
, the jth component of L, is a univariate homogeneous Lévy basis with characteristic triplet
$L^{(j)}$
, the jth component of L, is a univariate homogeneous Lévy basis with characteristic triplet
 \begin{align*}\gamma_{j}&=\gamma^{(j)}+\int_{\mathbb{R}^{m}}x^{(j)} \big(\mathbf{1}_{\rvert x^{(j)}\rvert\leq1}-\mathbf{1}_{\rVert x\rVert\leq1}\big)\nu({{\mathrm{d}}} x)=\gamma^{(j)}+\int_{\rVert x\rVert>1}x^{(j)}\mathbf{1}_{\rvert x^{(j)}\rvert\leq1}\nu({{\mathrm{d}}} x),\\\sigma_{j}^{2}&=\Sigma^{(\,j,\,j)}, \\\eta_{j}(B)&=\int_{\mathbb{R}}\mathbf{1}_{B}(x_{j})\nu({{\mathrm{d}}} x),\quad B\in\mathcal{B}(\mathbb{R}^{m}).\end{align*}
\begin{align*}\gamma_{j}&=\gamma^{(j)}+\int_{\mathbb{R}^{m}}x^{(j)} \big(\mathbf{1}_{\rvert x^{(j)}\rvert\leq1}-\mathbf{1}_{\rVert x\rVert\leq1}\big)\nu({{\mathrm{d}}} x)=\gamma^{(j)}+\int_{\rVert x\rVert>1}x^{(j)}\mathbf{1}_{\rvert x^{(j)}\rvert\leq1}\nu({{\mathrm{d}}} x),\\\sigma_{j}^{2}&=\Sigma^{(\,j,\,j)}, \\\eta_{j}(B)&=\int_{\mathbb{R}}\mathbf{1}_{B}(x_{j})\nu({{\mathrm{d}}} x),\quad B\in\mathcal{B}(\mathbb{R}^{m}).\end{align*}
Therefore, by replacing
 $\int_K, f(\varphi(u),q)$
, and
$\int_K, f(\varphi(u),q)$
, and
 $\rvert D(u)\rvert \,{{\mathrm{d}}} u$
with
$\rvert D(u)\rvert \,{{\mathrm{d}}} u$
with
 $\int_M, g^{(j)}(y,q)$
, and
$\int_M, g^{(j)}(y,q)$
, and
 $\mathcal{H}^{d-1}({{\mathrm{d}}} y)$
, respectively, in the proof of Lemma 3 in [Reference Sauri41], we conclude that if
$\mathcal{H}^{d-1}({{\mathrm{d}}} y)$
, respectively, in the proof of Lemma 3 in [Reference Sauri41], we conclude that if
 $g\,\colon {\mathbb{R}}^d\times{\mathbb{R}}^d\to{\mathbb{R}}^m$
is a measurable function satisfying
$g\,\colon {\mathbb{R}}^d\times{\mathbb{R}}^d\to{\mathbb{R}}^m$
is a measurable function satisfying
-
(i)
$\displaystyle\int_{M}\biggl[\int_{\mathbb{R}^{d}}\big(\rVert\gamma\rVert\rVert g(y,q)\rVert+\mathrm{trace}(\Sigma)\rVert g(y,q)\rVert^{2}\big)\,{{\mathrm{d}}} q\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)<\infty$
, -
(ii)
$\displaystyle\int_{M}\biggl[\int_{\mathbb{R}^{d}}\int_{\rVert x\rVert\leq1}\big(\rVert x\rVert\rVert g(y,q)\rVert\land\rVert x\rVert^{2}\rVert g(y,q)\rVert^{2}\big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)<\infty$
, -
(iii)
$\displaystyle\int_{\mathbb{R}^{d}}\int_{\rVert x\rVert>1}(\rVert x\rVert\rVert\chi(q)\rVert\land1)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q<\infty$
,



where
 $\chi(q)=\int_Mg(y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)$
, then the integrals below exist and almost surely
$\chi(q)=\int_Mg(y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)$
, then the integrals below exist and almost surely
 \[\int_M\biggl[\int_{{\mathbb{R}}^d}g(y,q)L({{\mathrm{d}}} q)\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)=\int_{{\mathbb{R}}^d}\biggl[\int_Mg(y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\biggr]L({{\mathrm{d}}} q).\]
\[\int_M\biggl[\int_{{\mathbb{R}}^d}g(y,q)L({{\mathrm{d}}} q)\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)=\int_{{\mathbb{R}}^d}\biggl[\int_Mg(y,q)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\biggr]L({{\mathrm{d}}} q).\]
Consequently, to ensure the validity of (4.12), we must check that for every
 $i=1,\ldots,d$
the function
$i=1,\ldots,d$
the function
 $g^{(j)}(y,q)=[H^{(i,j)}(r\,t\,y,q)-H^{(i,j)}(0,q)]f^{(i)}(y)$
satisfies the above three conditions. As demonstrated above, the support of g must lie in the bounded set
$g^{(j)}(y,q)=[H^{(i,j)}(r\,t\,y,q)-H^{(i,j)}(0,q)]f^{(i)}(y)$
satisfies the above three conditions. As demonstrated above, the support of g must lie in the bounded set
 $M\times (A\cup A\oplus rtM)$
and, in particular,
$M\times (A\cup A\oplus rtM)$
and, in particular,
 $\chi$
as above vanishes outside of
$\chi$
as above vanishes outside of
 $A\cup A\oplus rtM$
. Furthermore, by the continuity of F, we also have that
$A\cup A\oplus rtM$
. Furthermore, by the continuity of F, we also have that
 $\rVert g\rVert\leq C\rVert f\rVert$
on
$\rVert g\rVert\leq C\rVert f\rVert$
on
 $M\times (A\cup A\oplus rtM)$
. Condition (i) now follows from these observations and the fact that
$M\times (A\cup A\oplus rtM)$
. Condition (i) now follows from these observations and the fact that
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
and
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
and
 $\mathcal{H}^{d-1}(M)<\infty$
. Similarly, we deduce that the inner integral appearing in (ii) is bounded up to a constant by
$\mathcal{H}^{d-1}(M)<\infty$
. Similarly, we deduce that the inner integral appearing in (ii) is bounded up to a constant by
 \[\rVert f(y)\rVert^2\int_{\rVert x\rVert\leq1}\rVert x\rVert^{2}\nu({{\mathrm{d}}} x)\mathrm{Leb}(A\cup A\oplus rtM),\]
\[\rVert f(y)\rVert^2\int_{\rVert x\rVert\leq1}\rVert x\rVert^{2}\nu({{\mathrm{d}}} x)\mathrm{Leb}(A\cup A\oplus rtM),\]
while the integral in (iii) equals
 \[\int_{A\cup A\oplus rtM}\int_{\rVert x\rVert>1}(\rVert x\rVert\rVert\chi(q)\rVert\land1)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q\leq\nu(\{\rVert x\rVert>1\})\mathrm{Leb}(A\cup A\oplus rtM)<\infty.\]
\[\int_{A\cup A\oplus rtM}\int_{\rVert x\rVert>1}(\rVert x\rVert\rVert\chi(q)\rVert\land1)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q\leq\nu(\{\rVert x\rVert>1\})\mathrm{Leb}(A\cup A\oplus rtM)<\infty.\]
This completes our proof.
The decomposition (4.9) identifies the leading terms for
 $Y_{r}(t_{l},f) $
, which are typically given by
$Y_{r}(t_{l},f) $
, which are typically given by
 $ \Xi_{r}(\mathbf{T},f) $
and
$ \Xi_{r}(\mathbf{T},f) $
and
 $ \Phi_{r}(\mathbf{T},f)$
, as demonstrated by the following result.
$ \Phi_{r}(\mathbf{T},f)$
, as demonstrated by the following result.
Theorem 4.1. Let
 $\Psi_{r}$
be as in (4.10). Suppose that
$\Psi_{r}$
be as in (4.10). Suppose that
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, A is a compact gentle set, and F is of class
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M})$
, A is a compact gentle set, and F is of class
 $C^{1}$
. Then, as
$C^{1}$
. Then, as
 $r\downarrow0$
,
$r\downarrow0$
,
 \[\dfrac{1}{r}\Psi_{r}(\mathbf{T},f)\overset{\mathbb{P}}{\rightarrow}\sum_{l=1}^{n}\theta_{l}t_{l}\int_{M}f(y)^{\prime}\nabla X(p_{0})y\mathcal{H}^{d-1}({{\mathrm{d}}} y),\]
\[\dfrac{1}{r}\Psi_{r}(\mathbf{T},f)\overset{\mathbb{P}}{\rightarrow}\sum_{l=1}^{n}\theta_{l}t_{l}\int_{M}f(y)^{\prime}\nabla X(p_{0})y\mathcal{H}^{d-1}({{\mathrm{d}}} y),\]
where
 \[\nabla X(p)^{(i,k)}=\sum_{j=1}^{m}\int_{A+p}\partial_{k}F^{(i,j)}(p,q)L^{(j)}({{\mathrm{d}}} q).\]
\[\nabla X(p)^{(i,k)}=\sum_{j=1}^{m}\int_{A+p}\partial_{k}F^{(i,j)}(p,q)L^{(j)}({{\mathrm{d}}} q).\]
Proof. For
 $i=1,\ldots,d,j=1,\ldots,m$
, let
$i=1,\ldots,d,j=1,\ldots,m$
, let
 \[R_{F}^{(i,j)}(t,q,y)\,:\!=\, \dfrac{1}{r}\big(F^{(i,j)}(r\,t\,y,q)-F^{(i,j)}(0,q)\big)-t\sum_{k=1}^{d}\partial_{k}F^{(i,j)}(0,q)y^{(k)}.\]
\[R_{F}^{(i,j)}(t,q,y)\,:\!=\, \dfrac{1}{r}\big(F^{(i,j)}(r\,t\,y,q)-F^{(i,j)}(0,q)\big)-t\sum_{k=1}^{d}\partial_{k}F^{(i,j)}(0,q)y^{(k)}.\]
By the Mean Value Theorem and the
 $C^{1}$
property of F, we have that
$C^{1}$
property of F, we have that
 \begin{equation}\biggl|\int_{M}f(y)^{(i)}R_{F}^{(i,j)}(t,q,y)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\biggr|\leq C\int_{M}\| f(y)\| \| y\| \mathcal{H}^{d-1}({{\mathrm{d}}} y)<\infty,\end{equation}
\begin{equation}\biggl|\int_{M}f(y)^{(i)}R_{F}^{(i,j)}(t,q,y)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\biggr|\leq C\int_{M}\| f(y)\| \| y\| \mathcal{H}^{d-1}({{\mathrm{d}}} y)<\infty,\end{equation}
and, as
 $r\downarrow0$
,
$r\downarrow0$
,
 \[\int_{M}f(y)^{(i)}R_{F}^{(i,j)}(t,q,y)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\rightarrow0,\]
\[\int_{M}f(y)^{(i)}R_{F}^{(i,j)}(t,q,y)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\rightarrow0,\]
due to the Dominated Convergence Theorem. Applying this to (4.1) implies that, for all
 $t\in\mathbb{R}$
,
$t\in\mathbb{R}$
,
 \[\dfrac{1}{r}\int_{A}\int_{M}f(y)^{\prime}[F(r\,t\,y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\overset{\mathbb{P}}{\rightarrow}t\int_{M}f(y)^{\prime}DX(0)y\mathcal{H}^{d-1}({{\mathrm{d}}} y).\]
\[\dfrac{1}{r}\int_{A}\int_{M}f(y)^{\prime}[F(r\,t\,y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\overset{\mathbb{P}}{\rightarrow}t\int_{M}f(y)^{\prime}DX(0)y\mathcal{H}^{d-1}({{\mathrm{d}}} y).\]
Hence it is left to show that, for all
 $t\in\mathbb{R}$
,
$t\in\mathbb{R}$
,
 \[\int_{A\backslash(\cap_{k=0}^{n}A\ominus rt_{k}M)}\int_{M}f(y)^{\prime}\biggl[\dfrac{F(r\,t\,y,q)-F(0,q)}{r}\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\overset{\mathbb{P}}{\rightarrow}0.\]
\[\int_{A\backslash(\cap_{k=0}^{n}A\ominus rt_{k}M)}\int_{M}f(y)^{\prime}\biggl[\dfrac{F(r\,t\,y,q)-F(0,q)}{r}\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)L({{\mathrm{d}}} q)\overset{\mathbb{P}}{\rightarrow}0.\]
This is easily obtained by noticing that, by virtue of (4.1), the characteristic exponent of the latter integral equals
 \[\int_{A\backslash(\cap_{k=0}^{n}A\ominus rt_{k}M)}\psi\biggl[z\int_{M}f(y)^{\prime}\biggl[\dfrac{F(r\,t\,y,q)-F(0,q)}{r}\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)\biggr]\,{{\mathrm{d}}} q,\quad z\in\mathbb{R},\]
\[\int_{A\backslash(\cap_{k=0}^{n}A\ominus rt_{k}M)}\psi\biggl[z\int_{M}f(y)^{\prime}\biggl[\dfrac{F(r\,t\,y,q)-F(0,q)}{r}\biggr]\mathcal{H}^{d-1}({{\mathrm{d}}} y)\biggr]\,{{\mathrm{d}}} q,\quad z\in\mathbb{R},\]
and, due to (4.13) and the continuity of
 $\psi$
, it is bounded up to a constant by
$\psi$
, it is bounded up to a constant by
 \[\sum_{k=1}^{n}\mathrm{Leb}(A\backslash A\ominus rt_{k}M)\rightarrow0\quad \text{as $r\downarrow0$,}\]
\[\sum_{k=1}^{n}\mathrm{Leb}(A\backslash A\ominus rt_{k}M)\rightarrow0\quad \text{as $r\downarrow0$,}\]
thanks to Theorem 1 in [Reference Kiderlen and Rataj20].
We are now ready to present a proof of our main results.
Proof of Theorem 3.1.First, recall from our discussion above (see (4.8)) that we only need to concentrate on the case when
 $\phi(x)=x$
. Furthermore, from (4.9), the above theorem and our assumptions,
$\phi(x)=x$
. Furthermore, from (4.9), the above theorem and our assumptions,
 \begin{equation*}\dfrac{1}{r^{1/\alpha}}\sum_{l=1}^{n}\theta_{l}Y^{r}(t_{l},f) =\dfrac{1}{r^{1/\alpha}}\Phi_{r}(\mathbf{T},f)+\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)+\mathrm{o}_{\mathbb{P}}(1), \end{equation*}
\begin{equation*}\dfrac{1}{r^{1/\alpha}}\sum_{l=1}^{n}\theta_{l}Y^{r}(t_{l},f) =\dfrac{1}{r^{1/\alpha}}\Phi_{r}(\mathbf{T},f)+\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)+\mathrm{o}_{\mathbb{P}}(1), \end{equation*}
for every
 $1<\alpha\leq2$
. Hence it is enough to study the limit behaviour of the functionals
$1<\alpha\leq2$
. Hence it is enough to study the limit behaviour of the functionals
 $\Xi_{r}(\mathbf{T},f)$
and
$\Xi_{r}(\mathbf{T},f)$
and
 $\Phi_{r}(\mathbf{T},f)$
defined in (4.10). More specifically, we will show that under our assumptions it holds that
$\Phi_{r}(\mathbf{T},f)$
defined in (4.10). More specifically, we will show that under our assumptions it holds that
 \begin{equation}\dfrac{1}{r^{1/\alpha}}\Phi_{r}(\mathbf{T},f) \overset{\mathcal{F}\text{-}d}{\rightarrow}\sum_{l=1}^{n}\theta_{l}Y^{\alpha,+}(t_{l},f),\quad\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\overset{\mathcal{F}\text{-}d}{\rightarrow}\sum_{l=1}^{n}\theta_{l}Y^{\alpha,-}(t_{l},f),\end{equation}
\begin{equation}\dfrac{1}{r^{1/\alpha}}\Phi_{r}(\mathbf{T},f) \overset{\mathcal{F}\text{-}d}{\rightarrow}\sum_{l=1}^{n}\theta_{l}Y^{\alpha,+}(t_{l},f),\quad\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\overset{\mathcal{F}\text{-}d}{\rightarrow}\sum_{l=1}^{n}\theta_{l}Y^{\alpha,-}(t_{l},f),\end{equation}
where (recall the definition of
 $\Lambda_{\alpha}^{\pm}$
introduced in Section 3.1)
$\Lambda_{\alpha}^{\pm}$
introduced in Section 3.1)
 \[Y^{\alpha,\pm}(t,f)\,:\!=\, \pm\int_{(0,t]\times N(A)}G(t,f,s,x,n)\cdot\Lambda_{\alpha}^{\pm}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n)),\quad 1<\alpha\leq2,\]
\[Y^{\alpha,\pm}(t,f)\,:\!=\, \pm\int_{(0,t]\times N(A)}G(t,f,s,x,n)\cdot\Lambda_{\alpha}^{\pm}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n)),\quad 1<\alpha\leq2,\]
The proof will then be completed by observing that:
-
(i)
$\Xi_{r}(\mathbf{T},f)$
and
$\Phi_{r}(\mathbf{T},f)$
are independent, -
(ii)
$Y^{\alpha}=Y^{\alpha,+}+Y^{\alpha,-}$
.



For the rest of the proof we restrict our attention to
 $\Xi_{r}(\mathbf{T},f)$
since the arguments used in this case can be easily extrapolated to
$\Xi_{r}(\mathbf{T},f)$
since the arguments used in this case can be easily extrapolated to
 $\Phi_{r}(\mathbf{T},f)$
. Let us now verify that (4.14) is satisfied if Assumption
$\Phi_{r}(\mathbf{T},f)$
. Let us now verify that (4.14) is satisfied if Assumption
 ${\mathbf{A}}_\alpha$
holds for some
${\mathbf{A}}_\alpha$
holds for some
 $1<\alpha\leq2$
and A is a compact gentle set. Let
$1<\alpha\leq2$
and A is a compact gentle set. Let
 $\mathcal{F}_L\,:\!=\, \sigma\{L(B)\,\colon B\in \mathcal{B}^{\mathrm{Leb}}_{b}(\mathbb{R}^{d})\}$
. Since
$\mathcal{F}_L\,:\!=\, \sigma\{L(B)\,\colon B\in \mathcal{B}^{\mathrm{Leb}}_{b}(\mathbb{R}^{d})\}$
. Since
 $\Xi_{r}(\mathbf{T},f)$
is
$\Xi_{r}(\mathbf{T},f)$
is
 $\mathcal{F}_L$
-measurable, and thanks to Proposition 3.5 in [Reference Häusler and Luschgy13], it is sufficient to check that the convergence in (4.14) holds only weakly. To see that this is the case, fix
$\mathcal{F}_L$
-measurable, and thanks to Proposition 3.5 in [Reference Häusler and Luschgy13], it is sufficient to check that the convergence in (4.14) holds only weakly. To see that this is the case, fix
 $r_0>0$
, and observe that for any
$r_0>0$
, and observe that for any
 $r\leq r_0$
$r\leq r_0$
 \begin{align*} \dfrac{\Xi_{r_0}(\mathbf{T},f)}{r_0^{1/\alpha}}&=r_0^{-1/\alpha}\int_{\mathbf{B}_{r_0}\setminus\mathbf{B}_{r}}\sum_{l=1}^{n}\theta_{l}k_{l}^{(2)}(r_0,q)L({{\mathrm{d}}} q)+r_0^{-1/\alpha}\int_{\mathbf{B}_{r_0}\cap\mathbf{B}_{r}} \sum_{l=1}^{n}\theta_{l}k_{l}^{(2)}(r_0,q)L({{\mathrm{d}}} q)\\& \,=\!:\, \tilde{\Xi}_{0}^{r,1}+\tilde{\Xi}_{0}^{r,2},\end{align*}
\begin{align*} \dfrac{\Xi_{r_0}(\mathbf{T},f)}{r_0^{1/\alpha}}&=r_0^{-1/\alpha}\int_{\mathbf{B}_{r_0}\setminus\mathbf{B}_{r}}\sum_{l=1}^{n}\theta_{l}k_{l}^{(2)}(r_0,q)L({{\mathrm{d}}} q)+r_0^{-1/\alpha}\int_{\mathbf{B}_{r_0}\cap\mathbf{B}_{r}} \sum_{l=1}^{n}\theta_{l}k_{l}^{(2)}(r_0,q)L({{\mathrm{d}}} q)\\& \,=\!:\, \tilde{\Xi}_{0}^{r,1}+\tilde{\Xi}_{0}^{r,2},\end{align*}
where
 $\mathbf{B}_r=A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)$
. By construction,
$\mathbf{B}_r=A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)$
. By construction,
 $\tilde{\Xi}_{0}^{r,1}$
is independent of
$\tilde{\Xi}_{0}^{r,1}$
is independent of
 $ \Xi_{r}(\mathbf{T},f)$
and
$ \Xi_{r}(\mathbf{T},f)$
and
 $\tilde{\Xi}_{0}^{r,2}$
for every
$\tilde{\Xi}_{0}^{r,2}$
for every
 $r\leq r_0$
. Furthermore, given that
$r\leq r_0$
. Furthermore, given that
 \[\mathrm{Leb}(\mathbf{B}_r\cap\mathbf{B}_{r_0})\leq\sum_{k=1}^{n}\mathrm{Leb}(A\backslash A\ominus rt_{k}M)\rightarrow0\quad \text{as $r\downarrow0$,}\]
\[\mathrm{Leb}(\mathbf{B}_r\cap\mathbf{B}_{r_0})\leq\sum_{k=1}^{n}\mathrm{Leb}(A\backslash A\ominus rt_{k}M)\rightarrow0\quad \text{as $r\downarrow0$,}\]
and F is continuous, we also have that
 $\tilde{\Xi}_{0}^{r,2}\overset{\mathbb{P}}{\rightarrow}0$
and
$\tilde{\Xi}_{0}^{r,2}\overset{\mathbb{P}}{\rightarrow}0$
and
 $\tilde{\Xi}_{0}^{r,1}\overset{\mathbb{P}}{\rightarrow}\Xi_{r_0}(\mathbf{T},f)$
. Hence, if (4.14) holds only weakly, the above properties, along with Slutsky’s theorem, yield
$\tilde{\Xi}_{0}^{r,1}\overset{\mathbb{P}}{\rightarrow}\Xi_{r_0}(\mathbf{T},f)$
. Hence, if (4.14) holds only weakly, the above properties, along with Slutsky’s theorem, yield
 \[ \biggl(\dfrac{\Xi_{r}(\mathbf{T},f)}{r^{1/\alpha}},\dfrac{\Xi_{r_0}(\mathbf{T},f)}{r_0^{1/\alpha}}\biggr)\overset{d}{\rightarrow}\Biggl(\sum_{l=1}^{n}\theta_{l}Y^{\alpha,+}(t_{l},f),\dfrac{\Xi_{r_0}(\mathbf{T},f)}{r_0^{1/\alpha}}\Biggr),\]
\[ \biggl(\dfrac{\Xi_{r}(\mathbf{T},f)}{r^{1/\alpha}},\dfrac{\Xi_{r_0}(\mathbf{T},f)}{r_0^{1/\alpha}}\biggr)\overset{d}{\rightarrow}\Biggl(\sum_{l=1}^{n}\theta_{l}Y^{\alpha,+}(t_{l},f),\dfrac{\Xi_{r_0}(\mathbf{T},f)}{r_0^{1/\alpha}}\Biggr),\]
which, according to part (iii) of Exercise 3.9 in [Reference Häusler and Luschgy13], results in the sought-after
 $\mathcal{F}$
-stable convergence.
$\mathcal{F}$
-stable convergence.
Let
 $\psi_{\alpha}$
be as in (2.4) but with
$\psi_{\alpha}$
be as in (2.4) but with
 $\lambda$
replaced by
$\lambda$
replaced by
 $\bar{\lambda}({{\mathrm{d}}} u)=\alpha K(u)\lambda({{\mathrm{d}}} u)$
when
$\bar{\lambda}({{\mathrm{d}}} u)=\alpha K(u)\lambda({{\mathrm{d}}} u)$
when
 $1<\alpha<2$
; otherwise we set
$1<\alpha<2$
; otherwise we set
 $\psi_{\alpha}(w)=-\tfrac{1}{2}w^{\prime}\Sigma w $
. From Lemma 4.3 and Remark 4.2 below, for all
$\psi_{\alpha}(w)=-\tfrac{1}{2}w^{\prime}\Sigma w $
. From Lemma 4.3 and Remark 4.2 below, for all
 $z\in\mathbb{R}$
, it holds that
$z\in\mathbb{R}$
, it holds that
 \begin{equation}\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\biggr)=\dfrac{1}{r}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}\psi_{\alpha}\big(zI_{\mathbf{T},f}^{r}(q)\big)\,{{\mathrm{d}}} q+\mathrm{o}(1),\end{equation}
\begin{equation}\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\biggr)=\dfrac{1}{r}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}\psi_{\alpha}\big(zI_{\mathbf{T},f}^{r}(q)\big)\,{{\mathrm{d}}} q+\mathrm{o}(1),\end{equation}
where
 \begin{equation}I_{\mathbf{T},f}^{r}(q)\,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{equation}
\begin{equation}I_{\mathbf{T},f}^{r}(q)\,:\!=\, \sum_{l=1}^{n}\theta_{l}\int_{M}f(y)^{\prime}[H(rt_{l}y,q)-F(0,q)]\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{equation}
Now set (see Section 2)
 $u\equiv n_{A}(x)$
,
$u\equiv n_{A}(x)$
,
 $\delta_{+}=\delta(x,u)$
, and
$\delta_{+}=\delta(x,u)$
, and
 $\delta_{-}=\delta(x,-u)$
. By the continuity of F and
$\delta_{-}=\delta(x,-u)$
. By the continuity of F and
 $\psi_{\alpha}$
,
$\psi_{\alpha}$
,
 $\psi_{\alpha}(zI_{\mathbf{T},f}^{r}({\cdot}))$
is locally bounded. Therefore we can apply Proposition 4 (Steiner’s formula for gentle sets) along with the arguments of Theorem 1 in [Reference Kiderlen and Rataj20] (cf. [Reference Hug, Last and Weil15]) to conclude that
$\psi_{\alpha}(zI_{\mathbf{T},f}^{r}({\cdot}))$
is locally bounded. Therefore we can apply Proposition 4 (Steiner’s formula for gentle sets) along with the arguments of Theorem 1 in [Reference Kiderlen and Rataj20] (cf. [Reference Hug, Last and Weil15]) to conclude that
 \[\dfrac{1}{r}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}\psi_{\alpha}\bigl(zI_{\mathbf{T},f}^{r}(q)\bigr)\,{{\mathrm{d}}} q=\dfrac{1}{r}\int_{\partial A}g_{r}(x,z)\mathcal{H}^{d-1}({{\mathrm{d}}} x)+\mathrm{o}(1),\]
\[\dfrac{1}{r}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}\psi_{\alpha}\bigl(zI_{\mathbf{T},f}^{r}(q)\bigr)\,{{\mathrm{d}}} q=\dfrac{1}{r}\int_{\partial A}g_{r}(x,z)\mathcal{H}^{d-1}({{\mathrm{d}}} x)+\mathrm{o}(1),\]
in which we have let
 \[g_{r}(x,z)\,:\!=\, \int_{-\delta_{-}}^{0}\psi_{\alpha}\bigl(zI_{\mathbf{T},f}^{r}(x+su)\bigr)\mathbf{1}_{(\cap_{k=1}^{n}A\ominus rt_{k}M)^{c}}(x+su)\,{{\mathrm{d}}} s.\]
\[g_{r}(x,z)\,:\!=\, \int_{-\delta_{-}}^{0}\psi_{\alpha}\bigl(zI_{\mathbf{T},f}^{r}(x+su)\bigr)\mathbf{1}_{(\cap_{k=1}^{n}A\ominus rt_{k}M)^{c}}(x+su)\,{{\mathrm{d}}} s.\]
Next we focus on showing that for
 ${\mathcal H}^{d-1}$
-a.e.
${\mathcal H}^{d-1}$
-a.e.
 $x\in\partial A$
,
$x\in\partial A$
,
 \begin{equation}\dfrac{1}{r}g_{r}(x,z)\rightarrow\int_{0}^{t_{n}}\psi_{\alpha}\Biggl({-}z\sum_{l=1}^{n}\theta_{l}G(t_{l},f,s,x,-u)\Biggr)\,{{\mathrm{d}}} sh_{M}({-}u)^{+},\quad r\downarrow0.\end{equation}
\begin{equation}\dfrac{1}{r}g_{r}(x,z)\rightarrow\int_{0}^{t_{n}}\psi_{\alpha}\Biggl({-}z\sum_{l=1}^{n}\theta_{l}G(t_{l},f,s,x,-u)\Biggr)\,{{\mathrm{d}}} sh_{M}({-}u)^{+},\quad r\downarrow0.\end{equation}
To do this, we first note that since A is gentle, for
 ${\mathcal H}^{d-1}$
-a.e.
${\mathcal H}^{d-1}$
-a.e.
 $x\in\partial A$
,
$x\in\partial A$
,
 $\delta_{+},\delta_{-}>0$
and
$\delta_{+},\delta_{-}>0$
and
 \begin{equation}{B}_{+}\,:\!=\, {B}_{\delta_{+}}(x+\delta_{+}u)\subset A^{c},\quad B_{-}\,:\!=\, B_{\delta_{-}}(x-\delta_{-}u)\subseteq A,\end{equation}
\begin{equation}{B}_{+}\,:\!=\, {B}_{\delta_{+}}(x+\delta_{+}u)\subset A^{c},\quad B_{-}\,:\!=\, B_{\delta_{-}}(x-\delta_{-}u)\subseteq A,\end{equation}
where
 $B_{R}(p)$
is a ball of radius
$B_{R}(p)$
is a ball of radius
 $R>0$
and centre p. Using this and the relation
$R>0$
and centre p. Using this and the relation
 $(A\ominus rtM)^{c}=A^{c}\oplus rtM$
, we deduce that for every
$(A\ominus rtM)^{c}=A^{c}\oplus rtM$
, we deduce that for every
 $t>0$
it holds that
$t>0$
it holds that
 \begin{equation}\mathbf{1}_{(A\ominus rtM)^{c}}(q)=\begin{cases}1 & \text{if $ q\in{B}_{+}+rtp$,}\\0 & \text{if $ q-rtM\subseteq B_{-}$,}\end{cases}\end{equation}
\begin{equation}\mathbf{1}_{(A\ominus rtM)^{c}}(q)=\begin{cases}1 & \text{if $ q\in{B}_{+}+rtp$,}\\0 & \text{if $ q-rtM\subseteq B_{-}$,}\end{cases}\end{equation}
for some
 $p\in M$
. Fix
$p\in M$
. Fix
 $x\in\partial A$
satisfying (4.18) and choose
$x\in\partial A$
satisfying (4.18) and choose
 $p_{-}(x)\in M$
such that
$p_{-}(x)\in M$
such that
 $-p_{-}\cdot u=h_{M}({-}u)$
. From (4.19), we infer that for r small enough and
$-p_{-}\cdot u=h_{M}({-}u)$
. From (4.19), we infer that for r small enough and
 $\delta_{+}>s>-\delta_{-}$
,
$\delta_{+}>s>-\delta_{-}$
,
 \begin{equation}\mathbf{1}_{(\cap_{k=1}^{n}A\ominus rt_{k}M)^{c}}(q)=\begin{cases}1 & \text{if $ s>\mathrm{o}_{+}(rt_{n})-rt_{n}h_{M}({-}u)$,}\\0 & \text{if $ s<-\max_{k} \{rt_{k}h_{M} ({-}u) + \mathrm{o}_{-} (rt_{k})$}\},\end{cases}\end{equation}
\begin{equation}\mathbf{1}_{(\cap_{k=1}^{n}A\ominus rt_{k}M)^{c}}(q)=\begin{cases}1 & \text{if $ s>\mathrm{o}_{+}(rt_{n})-rt_{n}h_{M}({-}u)$,}\\0 & \text{if $ s<-\max_{k} \{rt_{k}h_{M} ({-}u) + \mathrm{o}_{-} (rt_{k})$}\},\end{cases}\end{equation}
where
 $q=x+su$
and
$q=x+su$
and
 $\mathrm{o}_{\pm}(r)=(\delta_{\pm}-\sqrt{\delta_{\pm}^{2}-r^{2}})=\mathrm{o}(r)$
. Hence
$\mathrm{o}_{\pm}(r)=(\delta_{\pm}-\sqrt{\delta_{\pm}^{2}-r^{2}})=\mathrm{o}(r)$
. Hence
 \begin{align}\dfrac{1}{r}g_{r}(x,z)= & \int_{-t_{n}h_{M}({-}u)}^{0}\psi_{\alpha}\big(zI_{\mathbf{T},f}^{r}(x+rsu)\big)\,{{\mathrm{d}}} s\mathbf{1}_{h_{M}({-}u)>0}+\mathrm{o}(1),\end{align}
\begin{align}\dfrac{1}{r}g_{r}(x,z)= & \int_{-t_{n}h_{M}({-}u)}^{0}\psi_{\alpha}\big(zI_{\mathbf{T},f}^{r}(x+rsu)\big)\,{{\mathrm{d}}} s\mathbf{1}_{h_{M}({-}u)>0}+\mathrm{o}(1),\end{align}
where we further used that
 $\psi_{\alpha}(zI_{\mathbf{T},f}^{r}({\cdot}))$
is locally bounded and made a change of variables. Let us now compute the limit of
$\psi_{\alpha}(zI_{\mathbf{T},f}^{r}({\cdot}))$
is locally bounded and made a change of variables. Let us now compute the limit of
 $I_{\mathbf{T},f}^{r}(x+rsu)$
. To do this, thanks to Theorem 10.10 in [Reference Mattila25], we may and do assume that
$I_{\mathbf{T},f}^{r}(x+rsu)$
. To do this, thanks to Theorem 10.10 in [Reference Mattila25], we may and do assume that
 \begin{equation}\mathcal{H}^{d-1}(M\cap\{y\,\colon ty\cdot u=s\})=0.\end{equation}
\begin{equation}\mathcal{H}^{d-1}(M\cap\{y\,\colon ty\cdot u=s\})=0.\end{equation}
Reasoning as in (4.19) and (4.20), we conclude that, for all
 $t\geq0$
and
$t\geq0$
and
 $q_{r}(t)=x+sru-r\,t\,y$
,
$q_{r}(t)=x+sru-r\,t\,y$
,
 \[\mathbf{1}_{A}(q_{r}(t))=\begin{cases}1 & \text{if $ ty\cdot u > s+\mathrm{o}_{-}(tr)/r$,}\\0 & \text{if $ ty\cdot u < s-\mathrm{o}_{+}(tr)/r$.}\end{cases}\]
\[\mathbf{1}_{A}(q_{r}(t))=\begin{cases}1 & \text{if $ ty\cdot u > s+\mathrm{o}_{-}(tr)/r$,}\\0 & \text{if $ ty\cdot u < s-\mathrm{o}_{+}(tr)/r$.}\end{cases}\]
Thus
 \begin{align*}I_{\mathbf{T},f}^{r}(q)& =- \sum_{l=1}^{n}\theta_{l}\int_{M}f(y)^{\prime}\mathbf{1}_{t_{l}y\cdot u < s-\mathrm{o}_{+}(rt_{l})/r}\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(0,q_{r}(t_l))+\mathrm{o}(1)\\& \rightarrow -\sum_{l=1}^{n}\theta_{l}\int_{M}f(y)^{\prime}\mathbf{1}_{({-}\infty,s]}(t_{l}y\cdot u)\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(0,x),\end{align*}
\begin{align*}I_{\mathbf{T},f}^{r}(q)& =- \sum_{l=1}^{n}\theta_{l}\int_{M}f(y)^{\prime}\mathbf{1}_{t_{l}y\cdot u < s-\mathrm{o}_{+}(rt_{l})/r}\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(0,q_{r}(t_l))+\mathrm{o}(1)\\& \rightarrow -\sum_{l=1}^{n}\theta_{l}\int_{M}f(y)^{\prime}\mathbf{1}_{({-}\infty,s]}(t_{l}y\cdot u)\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(0,x),\end{align*}
where we also used (4.22) and the fact that
 ${\mathrm{o}_{\pm}(r)}{r} \downarrow0$
as
${\mathrm{o}_{\pm}(r)}{r} \downarrow0$
as
 $r \downarrow0$
. The convergence in (4.17) follows now by applying this to (4.21) and a simple change of variables. Finally, since
$r \downarrow0$
. The convergence in (4.17) follows now by applying this to (4.21) and a simple change of variables. Finally, since
 \[| g_{r}(x,z)|\leq C\sum_{k=1}^{n}\int_{-\delta_{+}}^{0}\mathbf{1}_{A_{\oplus rt_{k}}^{*}}(x+sn_{A}(x))\,{{\mathrm{d}}} s\leq Cr,\]
\[| g_{r}(x,z)|\leq C\sum_{k=1}^{n}\int_{-\delta_{+}}^{0}\mathbf{1}_{A_{\oplus rt_{k}}^{*}}(x+sn_{A}(x))\,{{\mathrm{d}}} s\leq Cr,\]
the limits in (4.14) can now be easily obtained by the Dominated Convergence Theorem, (4.17), and the fact that
 $\mathbf{1}_{[sh_{M}(u),+\infty)}(ty\cdot u)=0$
for
$\mathbf{1}_{[sh_{M}(u),+\infty)}(ty\cdot u)=0$
for
 $s>t.$
$s>t.$
Proof of Theorem 3.2.Observe first that in this situation
 \begin{align*} \dfrac{1}{r}\sum_{l=1}^{n}\theta_{l}Y^{r}(t_{l},f)= & \sum_{l=1}^{n}\theta_{l}t_{l}\int_{M}f(y)^{\prime}\nabla X(p_{0})y\mathcal{H}^{d-1}({{\mathrm{d}}} y)+\mathrm{o}_{\mathbb{P}}(1)\notag \\& +\dfrac{1}{r}\Psi_{r}(\mathbf{T},f)+\dfrac{1}{r}\Xi_{r}(\mathbf{T},f),\end{align*}
\begin{align*} \dfrac{1}{r}\sum_{l=1}^{n}\theta_{l}Y^{r}(t_{l},f)= & \sum_{l=1}^{n}\theta_{l}t_{l}\int_{M}f(y)^{\prime}\nabla X(p_{0})y\mathcal{H}^{d-1}({{\mathrm{d}}} y)+\mathrm{o}_{\mathbb{P}}(1)\notag \\& +\dfrac{1}{r}\Psi_{r}(\mathbf{T},f)+\dfrac{1}{r}\Xi_{r}(\mathbf{T},f),\end{align*}
due to Theorem 4.1. Note also that thanks to Lemma 4.3, (4.15) also holds if we replace
 $\psi_{\alpha}$
with
$\psi_{\alpha}$
with
 $\tilde{\psi}(w)=\mathbf{i}\gamma_{0}\cdot w$
. Therefore, by setting
$\tilde{\psi}(w)=\mathbf{i}\gamma_{0}\cdot w$
. Therefore, by setting
 \[Y^{1,\pm}(t,f)\,:\!=\, \pm\int_{(0,t]\times N(A)}G(t,f,s,x,n)\cdot\gamma_{0}\mu^{\pm}_{M,A}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n)),\]
\[Y^{1,\pm}(t,f)\,:\!=\, \pm\int_{(0,t]\times N(A)}G(t,f,s,x,n)\cdot\gamma_{0}\mu^{\pm}_{M,A}({{\mathrm{d}}} s\,{{\mathrm{d}}} (x,n)),\]
and arguing exactly as in the proof of Theorem 3.1, we deduce that
 \[ \dfrac{1}{r}\Xi_{r}(\mathbf{T},f)\overset{\mathbb{P}}{\rightarrow} \sum_{l=1}^{n} \theta_{l}Y^{1,-}(t_{l},f).\]
\[ \dfrac{1}{r}\Xi_{r}(\mathbf{T},f)\overset{\mathbb{P}}{\rightarrow} \sum_{l=1}^{n} \theta_{l}Y^{1,-}(t_{l},f).\]
Similarly, we obtain
 \[ \dfrac{1}{r}\Psi_{r}(\mathbf{T},f)\overset{\mathbb{P}}{\rightarrow} \sum_{l=1}^{n} \theta_{l}Y^{1,+}(t_{l},f).\]
\[ \dfrac{1}{r}\Psi_{r}(\mathbf{T},f)\overset{\mathbb{P}}{\rightarrow} \sum_{l=1}^{n} \theta_{l}Y^{1,+}(t_{l},f).\]
Therefore, in order to finish the proof, we only need to check that the sum of
 $Y^{1,+}(t,f)$
and
$Y^{1,+}(t,f)$
and
 $Y^{1,-}(t,f)$
equals
$Y^{1,-}(t,f)$
equals
 \[t\sum_{i,k,m} \int_{M}\int_{A+p_{0}}f(y)^{(i)} \partial_{k+d}F^{(i,j)} (p_{0},x) \gamma_{0}^{(i)}y^{(k)} \,{{\mathrm{d}}} q \mathcal{H}^{d-1}({{\mathrm{d}}} y).\]
\[t\sum_{i,k,m} \int_{M}\int_{A+p_{0}}f(y)^{(i)} \partial_{k+d}F^{(i,j)} (p_{0},x) \gamma_{0}^{(i)}y^{(k)} \,{{\mathrm{d}}} q \mathcal{H}^{d-1}({{\mathrm{d}}} y).\]
This relation is obtained easily by applying Fubini’s theorem, using the identity
 \[\int_{0}^{t}G(t,f,s,x,\pm u)\,{{\mathrm{d}}} s=\dfrac{t}{h_{M}(u)}\int_{M}f(y)^{\prime}(\pm y\cdot u)^{+}\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(p_{0},x),\quad h_{M}(\pm u)>0,\]
\[\int_{0}^{t}G(t,f,s,x,\pm u)\,{{\mathrm{d}}} s=\dfrac{t}{h_{M}(u)}\int_{M}f(y)^{\prime}(\pm y\cdot u)^{+}\mathcal{H}^{d-1}({{\mathrm{d}}} y)F(p_{0},x),\quad h_{M}(\pm u)>0,\]
and by the classical Divergence Theorem.
4.3. Two fundamental approximations
In this subsection, we show that in the proof of Theorems 3.1 and 3.2 it is enough to concentrate on the case when
 $\phi$
is the identity function and L is a strictly
$\phi$
is the identity function and L is a strictly
 $\alpha$
-stable Lévy basis.
$\alpha$
-stable Lévy basis.
Lemma 4.1. Let X be as in (3.2), with A a compact gentle set and
 $Y_r$
as in (4.7). Then, for all
$Y_r$
as in (4.7). Then, for all
 $\phi\in C_{\beta}^{2}$
,
$\phi\in C_{\beta}^{2}$
,
 $f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M}),$
and
$f\in L^{2}(\mathcal{H}^{d-1}\downharpoonright_{M}),$
and
 $1<\alpha\leq2$
, we have that, as
$1<\alpha\leq2$
, we have that, as
 $r\downarrow0$
,
$r\downarrow0$
,
 \begin{equation}\dfrac{1}{r^{1/\alpha}}\Biggl\arrowvert Z^{\phi,r}(t,f)-\sum_{i,j}D\phi(X(p_{0}))^{(i,j)}Y_{r}(t,f^{(i)}\mathbf{e}_{j})\Biggr\arrowvert\overset{\mathbb{P}}{\rightarrow}0.\end{equation}
\begin{equation}\dfrac{1}{r^{1/\alpha}}\Biggl\arrowvert Z^{\phi,r}(t,f)-\sum_{i,j}D\phi(X(p_{0}))^{(i,j)}Y_{r}(t,f^{(i)}\mathbf{e}_{j})\Biggr\arrowvert\overset{\mathbb{P}}{\rightarrow}0.\end{equation}
If in addition
 $\Sigma=0$
and
$\Sigma=0$
and
 $\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<\infty$
, then (4.23) also holds for
$\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<\infty$
, then (4.23) also holds for
 $\alpha=1$
.
$\alpha=1$
.
The proof of this lemma requires the following ad hoc version of Corollary 1.2.7 in [Reference Turner44]; see proof (case 3) of Theorem 1 in [Reference Luschgy and Pagès24]. Recall that if
 $ \Upsilon$
is an
$ \Upsilon$
is an
 ${\mathbb{R}}^m$
-valued homogeneous Lévy basis on
${\mathbb{R}}^m$
-valued homogeneous Lévy basis on
 ${\mathbb{R}}^d$
, then the d-dimensional ID random vector
${\mathbb{R}}^d$
, then the d-dimensional ID random vector
 $\int_{{\mathbb{R}}}F(q) \Upsilon({{\mathrm{d}}} q)$
is defined as
$\int_{{\mathbb{R}}}F(q) \Upsilon({{\mathrm{d}}} q)$
is defined as
 \begin{equation*} \biggl[\int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr] ^{(i)}\,:\!=\, \sum_{j=1}^{m}\int_{{\mathbb{R}}^d}F^{(i,j)}(q)\Upsilon^{(j)}({{\mathrm{d}}} q),\quad i=1,\ldots,d,\end{equation*}
\begin{equation*} \biggl[\int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr] ^{(i)}\,:\!=\, \sum_{j=1}^{m}\int_{{\mathbb{R}}^d}F^{(i,j)}(q)\Upsilon^{(j)}({{\mathrm{d}}} q),\quad i=1,\ldots,d,\end{equation*}
where each stochastic integral is understood as in [Reference Rajput and Rosiński33].
Lemma 4.2. Let
 $ \Upsilon$
be an
$ \Upsilon$
be an
 ${\mathbb{R}}^m$
-valued homogeneous Lévy basis on
${\mathbb{R}}^m$
-valued homogeneous Lévy basis on
 ${\mathbb{R}}^d$
with characteristic exponent
${\mathbb{R}}^d$
with characteristic exponent
 \begin{equation*} \psi_\Upsilon(z)=\int_{\mathbb{R}^m\backslash\{0\}}\big({{\mathrm{e}}}^{\mathbf{i}z \cdot x}-1-\mathbf{i}z\cdot x \big)\nu({{\mathrm{d}}} x),\quad z\in{\mathbb{R}}^m.\end{equation*}
\begin{equation*} \psi_\Upsilon(z)=\int_{\mathbb{R}^m\backslash\{0\}}\big({{\mathrm{e}}}^{\mathbf{i}z \cdot x}-1-\mathbf{i}z\cdot x \big)\nu({{\mathrm{d}}} x),\quad z\in{\mathbb{R}}^m.\end{equation*}
Suppose that
 $\int_{{\mathbb{R}}^m}\rVert x\rVert^p\nu({{\mathrm{d}}} x)<\infty$
for some
$\int_{{\mathbb{R}}^m}\rVert x\rVert^p\nu({{\mathrm{d}}} x)<\infty$
for some
 $p\geq2$
. If
$p\geq2$
. If
 $F\,\colon {\mathbb{R}}^d\rightarrow{\mathbb{R}}^{d\times m}$
is measurable, bounded, and with compact support, then
$F\,\colon {\mathbb{R}}^d\rightarrow{\mathbb{R}}^{d\times m}$
is measurable, bounded, and with compact support, then
 \[{\mathbb{E}}\biggl(\biggl\rVert \int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr\rVert^p\biggr)<\infty.\]
\[{\mathbb{E}}\biggl(\biggl\rVert \int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr\rVert^p\biggr)<\infty.\]
Furthermore, there is
 $C_{p,\nu,m,d}>0$
such that
$C_{p,\nu,m,d}>0$
such that
 \begin{equation} {\mathbb{E}}\biggl(\biggl\rVert \int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr\rVert^p\biggr)\leq C_{p,\nu,m,d}\max \big\{ (\kappa_p)^{p/2},\kappa_p\big\},\end{equation}
\begin{equation} {\mathbb{E}}\biggl(\biggl\rVert \int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr\rVert^p\biggr)\leq C_{p,\nu,m,d}\max \big\{ (\kappa_p)^{p/2},\kappa_p\big\},\end{equation}
where
 \[\kappa_p\,:\!=\, \int_{\mathbb{R}^d}\big(\rVert F(q)\rVert^2 \vee\rVert F(q)\rVert^p \big)\,{{\mathrm{d}}} q.\]
\[\kappa_p\,:\!=\, \int_{\mathbb{R}^d}\big(\rVert F(q)\rVert^2 \vee\rVert F(q)\rVert^p \big)\,{{\mathrm{d}}} q.\]
Proof. By the Lévy–Khintchine representation,
 $\Upsilon^{(j)}$
, the jth component of
$\Upsilon^{(j)}$
, the jth component of
 $\Upsilon$
, is a univariate homogeneous Lévy basis with Lévy measure
$\Upsilon$
, is a univariate homogeneous Lévy basis with Lévy measure
 \[\eta_{j}(A)=\int_{{\mathbb{R}}^m}\mathbf{1}_{A}(x_j)\nu({{\mathrm{d}}} x).\]
\[\eta_{j}(A)=\int_{{\mathbb{R}}^m}\mathbf{1}_{A}(x_j)\nu({{\mathrm{d}}} x).\]
Thus, if
 $F\,\colon {\mathbb{R}}^d\rightarrow{\mathbb{R}}^{d\times m}$
is bounded with compact support, Proposition 2.6 and Theorem 2.7 in [Reference Rajput and Rosiński33] imply that the ID random variable
$F\,\colon {\mathbb{R}}^d\rightarrow{\mathbb{R}}^{d\times m}$
is bounded with compact support, Proposition 2.6 and Theorem 2.7 in [Reference Rajput and Rosiński33] imply that the ID random variable
 $Y^{(i,j)}=\int_{{\mathbb{R}}^d}F^{(i,j)}(q)\Upsilon^{(j)}({{\mathrm{d}}} q)$
is centred, does not have Gaussian component, and its Lévy measure is given by
$Y^{(i,j)}=\int_{{\mathbb{R}}^d}F^{(i,j)}(q)\Upsilon^{(j)}({{\mathrm{d}}} q)$
is centred, does not have Gaussian component, and its Lévy measure is given by
 \[\lambda_j(B)=\int_{\mathbb{R}^d}\int_{{\mathbb{R}}^m}\mathbf{1}_{B}\big(x_jF^{(i,j)}(q)\big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q.\]
\[\lambda_j(B)=\int_{\mathbb{R}^d}\int_{{\mathbb{R}}^m}\mathbf{1}_{B}\big(x_jF^{(i,j)}(q)\big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q.\]
Our assumptions now yield that for some
 $p\geq2$
,
$p\geq2$
,
 \[\int_{{\mathbb{R}}}\rvert y\rvert^p\mathbf{1}_{\rvert y\rvert>1}\lambda_j({{\mathrm{d}}} y)\leq \int_{\mathbb{R}^d}\int_{{\mathbb{R}}^m}\rVert x\rVert^p \big\rvert F^{(i,j)}(q)\big\rvert^p\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q<\infty.\]
\[\int_{{\mathbb{R}}}\rvert y\rvert^p\mathbf{1}_{\rvert y\rvert>1}\lambda_j({{\mathrm{d}}} y)\leq \int_{\mathbb{R}^d}\int_{{\mathbb{R}}^m}\rVert x\rVert^p \big\rvert F^{(i,j)}(q)\big\rvert^p\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q<\infty.\]
Thus, according to Theorem 25.3 in [Reference Sato40] and Corollary 1.2.7 in [Reference Turner44], we have
 ${\mathbb{E}}(\rvert Y^{(i,j)}\rvert^p)<\infty$
and
${\mathbb{E}}(\rvert Y^{(i,j)}\rvert^p)<\infty$
and
 \[{\mathbb{E}}\big(\rvert Y^{(i,j)}\rvert^p \big)\leq C_p\max\bigl\{\big(K^{(i,j)}_p \big)^{p/2},K^{(i,j)}_p\bigr\},\]
\[{\mathbb{E}}\big(\rvert Y^{(i,j)}\rvert^p \big)\leq C_p\max\bigl\{\big(K^{(i,j)}_p \big)^{p/2},K^{(i,j)}_p\bigr\},\]
where
 \[K^{(i,j)}_p=\int_{\mathbb{R}^d}\int_{{\mathbb{R}}^m}\big(\big\rvert x_jF^{(i,j)}(q)\big\rvert^2 \vee \big\rvert x_jF^{(i,j)}(q)\big\rvert^p \big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q.\]
\[K^{(i,j)}_p=\int_{\mathbb{R}^d}\int_{{\mathbb{R}}^m}\big(\big\rvert x_jF^{(i,j)}(q)\big\rvert^2 \vee \big\rvert x_jF^{(i,j)}(q)\big\rvert^p \big)\nu({{\mathrm{d}}} x)\,{{\mathrm{d}}} q.\]
Using
 $\tfrac{1}{2}(x+y)\leq\max\{x,y\}\leq x+y$
for
$\tfrac{1}{2}(x+y)\leq\max\{x,y\}\leq x+y$
for
 $x,y\geq0$
and the fact that
$x,y\geq0$
and the fact that
 $\int_{{\mathbb{R}}^m}\rVert x\rVert^p\nu({{\mathrm{d}}} x)<\infty$
, we further obtain
$\int_{{\mathbb{R}}^m}\rVert x\rVert^p\nu({{\mathrm{d}}} x)<\infty$
, we further obtain
 \[K^{(i,j)}_p\leq C_{p,\nu}\max \big\{(\kappa_p)^{p/2},\kappa_p \big\}.\]
\[K^{(i,j)}_p\leq C_{p,\nu}\max \big\{(\kappa_p)^{p/2},\kappa_p \big\}.\]
The estimate in (4.24) now follows from this inequality and the definition of
 $\int_{{\mathbb{R}}^d}F(q)\Upsilon({{\mathrm{d}}} q)$
.
$\int_{{\mathbb{R}}^d}F(q)\Upsilon({{\mathrm{d}}} q)$
.
Remark 4.1. Note that if in the proof of the above lemma we consider
 $\Upsilon$
to be a purely Gaussian homogeneous Lévy basis on
$\Upsilon$
to be a purely Gaussian homogeneous Lévy basis on
 ${\mathbb{R}}^d$
with covariance matrix
${\mathbb{R}}^d$
with covariance matrix
 $\Sigma$
, then the random variable
$\Sigma$
, then the random variable
 \[Y^{(i,j)}=\int_{{\mathbb{R}}^d}F^{(i,j)}(q)\Upsilon^{(j)}({{\mathrm{d}}} q)\]
\[Y^{(i,j)}=\int_{{\mathbb{R}}^d}F^{(i,j)}(q)\Upsilon^{(j)}({{\mathrm{d}}} q)\]
is normally distributed with mean 0 and variance
 \[\Sigma^{(j,j)}\int_{\mathbb{R}^d}\big\rvert F^{(i,j)}(q)\big\rvert^2 \,{{\mathrm{d}}} q.\]
\[\Sigma^{(j,j)}\int_{\mathbb{R}^d}\big\rvert F^{(i,j)}(q)\big\rvert^2 \,{{\mathrm{d}}} q.\]
Therefore, the proof of such a lemma applies, mutatis mutandis, to deduce that if
 $\Upsilon$
is a purely Gaussian homogeneous Lévy basis on
$\Upsilon$
is a purely Gaussian homogeneous Lévy basis on
 ${\mathbb{R}}^d$
, and
${\mathbb{R}}^d$
, and
 $F\,\colon {\mathbb{R}}^d\rightarrow{\mathbb{R}}^{d\times m}$
is measurable, bounded, and with compact support, then
$F\,\colon {\mathbb{R}}^d\rightarrow{\mathbb{R}}^{d\times m}$
is measurable, bounded, and with compact support, then
 \[ {\mathbb{E}}\biggl(\biggl\rVert \int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr\rVert^p\biggr)\leq C_p\biggl(\int_{\mathbb{R}^d}\rVert F^{(i,j)}(q)\rVert^2 \,{{\mathrm{d}}} q\biggr)^{p/2}.\]
\[ {\mathbb{E}}\biggl(\biggl\rVert \int_{{\mathbb{R}}^d}F(q) \Upsilon({{\mathrm{d}}} q)\biggr\rVert^p\biggr)\leq C_p\biggl(\int_{\mathbb{R}^d}\rVert F^{(i,j)}(q)\rVert^2 \,{{\mathrm{d}}} q\biggr)^{p/2}.\]
Proof of Lemma 4.1.Without loss of generality, we may and do assume that
 $0 < r\leq r_0$
for some fixed
$0 < r\leq r_0$
for some fixed
 $r_0>0$
. By the Mean Value Theorem, for all
$r_0>0$
. By the Mean Value Theorem, for all
 $\phi\in C_{\beta}^{2}$
, it holds that
$\phi\in C_{\beta}^{2}$
, it holds that
 \[\| \phi(x)-\phi(y)-D\phi(y)(x-y)\| \leq C \big(1+\| y\| ^{\beta-2} \big)\big(\lVert x-y\| ^{2}\lor\| x-y\| ^{\beta} \big),\,x,y\in\mathbb{R}^{d}.\]
\[\| \phi(x)-\phi(y)-D\phi(y)(x-y)\| \leq C \big(1+\| y\| ^{\beta-2} \big)\big(\lVert x-y\| ^{2}\lor\| x-y\| ^{\beta} \big),\,x,y\in\mathbb{R}^{d}.\]
As a result of this, the norm of
 \[\phi(X(p_{0}+r\,t\,y))-\phi(X(p_{0}))-D\phi(X(p_{0}))[X(p_{0}+r\,t\,y)-X(p_{0})]\]
\[\phi(X(p_{0}+r\,t\,y))-\phi(X(p_{0}))-D\phi(X(p_{0}))[X(p_{0}+r\,t\,y)-X(p_{0})]\]
is bounded up to a random constant (that only depends on
 $X(p_0)$
) by
$X(p_0)$
) by
 \[\| X(p_{0}+r\,t\,y)-X(p_{0})\| ^{2}\lor\| X(p_{0}+r\,t\,y)-X(p_{0})\| ^{\beta}.\]
\[\| X(p_{0}+r\,t\,y)-X(p_{0})\| ^{2}\lor\| X(p_{0}+r\,t\,y)-X(p_{0})\| ^{\beta}.\]
In consequence, it is enough to show that, for all
 $i=1,2,3,4$
(remember the decomposition (4.2)), as
$i=1,2,3,4$
(remember the decomposition (4.2)), as
 $r\downarrow0$
,
$r\downarrow0$
,
 \begin{equation}\dfrac{1}{r^{1/\alpha}}\int_{M}\| f(y)\| \big\| X^{(i)}(p_{0}+r\,t\,y)-X^{(i)}(p_{0}) \big\| ^{\beta_{0}}\mathcal{H}^{d-1}({{\mathrm{d}}} y)\overset{\mathbb{P}}{\rightarrow}0, \quad \beta_{0}\,:\!=\, 2\lor\beta.\end{equation}
\begin{equation}\dfrac{1}{r^{1/\alpha}}\int_{M}\| f(y)\| \big\| X^{(i)}(p_{0}+r\,t\,y)-X^{(i)}(p_{0}) \big\| ^{\beta_{0}}\mathcal{H}^{d-1}({{\mathrm{d}}} y)\overset{\mathbb{P}}{\rightarrow}0, \quad \beta_{0}\,:\!=\, 2\lor\beta.\end{equation}
For simplicity and notational convenience, we set
 $p_{0}=0$
for the remainder of the proof. Now, for
$p_{0}=0$
for the remainder of the proof. Now, for
 $i=1,\ldots,4$
, we write
$i=1,\ldots,4$
, we write
 \begin{align}X^{(i)}(r\,t\,y)-X^{(i)}(0) & =\int_{A\cap A\ominus\{r\,t\,y\}}(F(r\,t\,y,q)-F(0,q))L_{i}({{\mathrm{d}}} q)\notag \\&\quad +\int_{A\oplus\{r\,t\,y\}\backslash A}F(r\,t\,y,q)L_{i}({{\mathrm{d}}} q)\notag \\&\quad +\int_{A\backslash A\ominus\{r\,t\,y\}}(H(r\,t\,y,q)-F(0,q))L_{i}({{\mathrm{d}}} q)\end{align}
\begin{align}X^{(i)}(r\,t\,y)-X^{(i)}(0) & =\int_{A\cap A\ominus\{r\,t\,y\}}(F(r\,t\,y,q)-F(0,q))L_{i}({{\mathrm{d}}} q)\notag \\&\quad +\int_{A\oplus\{r\,t\,y\}\backslash A}F(r\,t\,y,q)L_{i}({{\mathrm{d}}} q)\notag \\&\quad +\int_{A\backslash A\ominus\{r\,t\,y\}}(H(r\,t\,y,q)-F(0,q))L_{i}({{\mathrm{d}}} q)\end{align}
where
 $L_{i}$
is the Lévy basis associated to
$L_{i}$
is the Lévy basis associated to
 $X^{(i)}$
via (4.2) and H as in (4.11). Using the fact that
$X^{(i)}$
via (4.2) and H as in (4.11). Using the fact that
 $A\oplus rtM\subseteq A_{\oplus rt}$
and
$A\oplus rtM\subseteq A_{\oplus rt}$
and
 $(A\ominus rtM)^{c}\subseteq A^{c}\oplus rtD_{1}$
, as well as the
$(A\ominus rtM)^{c}\subseteq A^{c}\oplus rtD_{1}$
, as well as the
 $C^{1}$
property of F, we deduce that for any
$C^{1}$
property of F, we deduce that for any
 $l\geq1$
there is a constant
$l\geq1$
there is a constant
 $C>0$
depending only on
$C>0$
depending only on
 $F,A,M,r_0$
, and t, such that
$F,A,M,r_0$
, and t, such that
 \begin{equation} \begin{aligned}\int_{A\cap A\ominus\{r\,t\,y\}}\rVert F(r\,t\,y,q)-F(0,q)\rVert^l\,{{\mathrm{d}}} q & \leq Cr^l,\\\int_{A\oplus\{r\,t\,y\}\backslash A}\rVert F(r\,t\,y,q)\rVert^l\,{{\mathrm{d}}} q&\leq C \mathrm{Leb}(A_{\oplus rt}\backslash A),\\\int_{A\backslash A\ominus\{r\,t\,y\}}\rVert H(r\,t\,y,q)-F(0,q)\rVert^l\,{{\mathrm{d}}} q& \leq C\mathrm{Leb}(A\backslash A\ominus rtD_{1}).\end{aligned} \end{equation}
\begin{equation} \begin{aligned}\int_{A\cap A\ominus\{r\,t\,y\}}\rVert F(r\,t\,y,q)-F(0,q)\rVert^l\,{{\mathrm{d}}} q & \leq Cr^l,\\\int_{A\oplus\{r\,t\,y\}\backslash A}\rVert F(r\,t\,y,q)\rVert^l\,{{\mathrm{d}}} q&\leq C \mathrm{Leb}(A_{\oplus rt}\backslash A),\\\int_{A\backslash A\ominus\{r\,t\,y\}}\rVert H(r\,t\,y,q)-F(0,q)\rVert^l\,{{\mathrm{d}}} q& \leq C\mathrm{Leb}(A\backslash A\ominus rtD_{1}).\end{aligned} \end{equation}
This immediately gives
 \[ \big\| X^{(1)}(r\,t\,y)-X^{(1)}(0)\big\| \leq C(r+\mathrm{Leb}(A_{\oplus rt}\backslash A)+\mathrm{Leb}(A\backslash A\ominus rtD_{1})).\]
\[ \big\| X^{(1)}(r\,t\,y)-X^{(1)}(0)\big\| \leq C(r+\mathrm{Leb}(A_{\oplus rt}\backslash A)+\mathrm{Leb}(A\backslash A\ominus rtD_{1})).\]
Now, since
 $L_{2}$
is a purely Gaussian homogeneous Lévy measure, the discussion in Remark 4.1 along with (4.27) asserts that
$L_{2}$
is a purely Gaussian homogeneous Lévy measure, the discussion in Remark 4.1 along with (4.27) asserts that
 \[\mathbb{E}\big( \big\| X^{(2)}(r\,t\,y)-X^{(2)}(0)\big\| ^{\beta_{0}}\big)\leq C\big(r^{2}+\mathrm{Leb}(A_{\oplus rt}\backslash A)+\mathrm{Leb}(A\backslash A\ominus rtD_{1})\big){}^{\beta_{0}/2}.\]
\[\mathbb{E}\big( \big\| X^{(2)}(r\,t\,y)-X^{(2)}(0)\big\| ^{\beta_{0}}\big)\leq C\big(r^{2}+\mathrm{Leb}(A_{\oplus rt}\backslash A)+\mathrm{Leb}(A\backslash A\ominus rtD_{1})\big){}^{\beta_{0}/2}.\]
Continuing with the case
 $i=3$
, note first that by construction,
$i=3$
, note first that by construction,
 $L_3$
has characteristic triplet
$L_3$
has characteristic triplet
 $(0, 0, \nu\downharpoonright_{D_{1}}) $
, with
$(0, 0, \nu\downharpoonright_{D_{1}}) $
, with
 $\nu\downharpoonright_{D_{1}}$
denoting the restriction of
$\nu\downharpoonright_{D_{1}}$
denoting the restriction of
 $\nu$
to the unit disk
$\nu$
to the unit disk
 $D_1$
. As a result, Lemma 4.1 applies to each of the stochastic integrals appearing in the decomposition (4.26). Utilising this and (4.27), we deduce that for r small enough,
$D_1$
. As a result, Lemma 4.1 applies to each of the stochastic integrals appearing in the decomposition (4.26). Utilising this and (4.27), we deduce that for r small enough,
 \[\mathbb{E} \big(\| X^{(3)}(r\,t\,y)-X^{(3)}(0)\| ^{\beta_{0}}\big)\leq C(r^{\beta_{0}}+\mathrm{Leb}(A_{\oplus rt}\backslash A)+\mathrm{Leb}(A\backslash A\ominus rtD_{1})).\]
\[\mathbb{E} \big(\| X^{(3)}(r\,t\,y)-X^{(3)}(0)\| ^{\beta_{0}}\big)\leq C(r^{\beta_{0}}+\mathrm{Leb}(A_{\oplus rt}\backslash A)+\mathrm{Leb}(A\backslash A\ominus rtD_{1})).\]
An application of the above estimates and Theorem 1 in [Reference Kiderlen and Rataj20] shows that (4.25) is valid for
 $i=1,2,3$
. On the other hand, using (4.3), (4.26), the
$i=1,2,3$
. On the other hand, using (4.3), (4.26), the
 $C^1$
property of F, and arguing as in the proof of Proposition 3.1, we infer that uniformly on
$C^1$
property of F, and arguing as in the proof of Proposition 3.1, we infer that uniformly on
 $y\in M$
,
$y\in M$
,
 $\mathbb{P}$
-a.s.
$\mathbb{P}$
-a.s.
 \begin{equation}\big\| X^{(4)}(r\,t\,y)-X^{(4)}(0)\big\| ^{\beta_{0}} \leq C(r\chi+\xi_{r})^{\beta_{0}},\end{equation}
\begin{equation}\big\| X^{(4)}(r\,t\,y)-X^{(4)}(0)\big\| ^{\beta_{0}} \leq C(r\chi+\xi_{r})^{\beta_{0}},\end{equation}
where
 \[\chi\,:\!=\, \int_{A}\int_{\mathbb{R}^{m}}\| x\| \mathbf{1}_{D_{1}^{c}}(x)N({{\mathrm{d}}} q\,{{\mathrm{d}}} x)\]
\[\chi\,:\!=\, \int_{A}\int_{\mathbb{R}^{m}}\| x\| \mathbf{1}_{D_{1}^{c}}(x)N({{\mathrm{d}}} q\,{{\mathrm{d}}} x)\]
and
 \[\xi_{r}\,:\!=\, \int_{(A_{\oplus rt}\backslash A)\cup(A\backslash A\ominus rtD_{1})}\int_{\mathbb{R}^{m}}\| x\| \mathbf{1}_{D_{1}^{c}}(x)N({{\mathrm{d}}} q\,{{\mathrm{d}}} x).\]
\[\xi_{r}\,:\!=\, \int_{(A_{\oplus rt}\backslash A)\cup(A\backslash A\ominus rtD_{1})}\int_{\mathbb{R}^{m}}\| x\| \mathbf{1}_{D_{1}^{c}}(x)N({{\mathrm{d}}} q\,{{\mathrm{d}}} x).\]
Therefore, in order to see that (4.25) is also satisfied for
 $i=4$
, we only need to check that
$i=4$
, we only need to check that
 \begin{equation}r^{-1/\alpha\beta_{0}}\xi_{r}\overset{\mathbb{P}}{\rightarrow}0.\end{equation}
\begin{equation}r^{-1/\alpha\beta_{0}}\xi_{r}\overset{\mathbb{P}}{\rightarrow}0.\end{equation}
The above relation is easily obtained by noting that
 $r^{-1/\alpha\beta_{0}}\xi_{r}$
is infinitely divisible with characteristic exponent
$r^{-1/\alpha\beta_{0}}\xi_{r}$
is infinitely divisible with characteristic exponent
 \[\mathrm{Leb}((A_{\oplus rt}\backslash A)\cup(A\backslash A\ominus rtD_{1}))\int_{\| x\| >1}\bigl({{\mathrm{e}}}^{\mathbf{i}zr^{-1/\alpha\beta_{0}}\| x\| }-1\bigr)\nu({{\mathrm{d}}} x),\quad z\in\mathbb{R},\]
\[\mathrm{Leb}((A_{\oplus rt}\backslash A)\cup(A\backslash A\ominus rtD_{1}))\int_{\| x\| >1}\bigl({{\mathrm{e}}}^{\mathbf{i}zr^{-1/\alpha\beta_{0}}\| x\| }-1\bigr)\nu({{\mathrm{d}}} x),\quad z\in\mathbb{R},\]
which is bounded up to a constant by r, once again, due to Theorem 1 in [Reference Kiderlen and Rataj20].
Now suppose that
 $\Sigma=0$
and
$\Sigma=0$
and
 $\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<\infty$
, in such a way that (4.4) takes the form
$\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<\infty$
, in such a way that (4.4) takes the form
 \[X(p)=\tilde{X}^{(1)}(p)+X^{(5)}(p)=\int_{A+p}F(p,q)\gamma_{0}\,{{\mathrm{d}}} q+\int_{\mathbb{R}^{d}}\int_{\mathbb{R}^{m}}H(p,q)xN({{\mathrm{d}}} q\,{{\mathrm{d}}} x).\]
\[X(p)=\tilde{X}^{(1)}(p)+X^{(5)}(p)=\int_{A+p}F(p,q)\gamma_{0}\,{{\mathrm{d}}} q+\int_{\mathbb{R}^{d}}\int_{\mathbb{R}^{m}}H(p,q)xN({{\mathrm{d}}} q\,{{\mathrm{d}}} x).\]
Exactly as above, we deduce that
 \[\dfrac{1}{r}\int_{M}\| f(y)\| \big\| \tilde{X}^{(1)}(r\,t\,y)-\tilde{X}^{(1)}(0)\big\| ^{\beta_{0}}\mathcal{H}^{d-1}({{\mathrm{d}}} y)\rightarrow0.\]
\[\dfrac{1}{r}\int_{M}\| f(y)\| \big\| \tilde{X}^{(1)}(r\,t\,y)-\tilde{X}^{(1)}(0)\big\| ^{\beta_{0}}\mathcal{H}^{d-1}({{\mathrm{d}}} y)\rightarrow0.\]
Moreover, (4.28) remains valid for
 $X^{(5)}$
if we replace
$X^{(5)}$
if we replace
 $\mathbf{1}_{D_{1}^{c}}$
with 1 in the definition of
$\mathbf{1}_{D_{1}^{c}}$
with 1 in the definition of
 $\chi$
and
$\chi$
and
 $\xi_{r}$
. Therefore, in order to finish the proof, we need to verify that (4.29) holds for
$\xi_{r}$
. Therefore, in order to finish the proof, we need to verify that (4.29) holds for
 $\alpha=1$
under this new definition of
$\alpha=1$
under this new definition of
 $\xi_{r}$
. To see that this is the case, first note that the characteristic exponent
$\xi_{r}$
. To see that this is the case, first note that the characteristic exponent
 $r^{-1/\beta_{0}}\xi_{r}$
now equals
$r^{-1/\beta_{0}}\xi_{r}$
now equals
 \[\mathrm{Leb}((A_{\oplus rt}\backslash A)\cup(A\backslash A\ominus rtD_{1}))\int_{\mathbb{R}^{m}}\bigl({{\mathrm{e}}}^{\mathbf{i}zr^{-1/\beta_{0}}\| x\| }-1\bigr)\nu({{\mathrm{d}}} x).\]
\[\mathrm{Leb}((A_{\oplus rt}\backslash A)\cup(A\backslash A\ominus rtD_{1}))\int_{\mathbb{R}^{m}}\bigl({{\mathrm{e}}}^{\mathbf{i}zr^{-1/\beta_{0}}\| x\| }-1\bigr)\nu({{\mathrm{d}}} x).\]
Again invoking Theorem 1 in [Reference Kiderlen and Rataj20], we infer that the above quantity is bounded up to a constant by
 \[r\int_{\mathbb{R}^{m}}\big(1\land r^{-1/\beta_{0}}\| zx\| \big)\nu({{\mathrm{d}}} x)\leq Cr\big(1\lor r^{-1/\beta_{0}}| z|\big)\rightarrow0\quad \text{as $r\downarrow0$,}\]
\[r\int_{\mathbb{R}^{m}}\big(1\land r^{-1/\beta_{0}}\| zx\| \big)\nu({{\mathrm{d}}} x)\leq Cr\big(1\lor r^{-1/\beta_{0}}| z|\big)\rightarrow0\quad \text{as $r\downarrow0$,}\]
because
 $\beta_{0}\geq2$
. This concludes the proof.
$\beta_{0}\geq2$
. This concludes the proof.
Below,
 $\psi_{2}(w)=-\tfrac{1}{2}w^{\prime}\Sigma w$
and, for
$\psi_{2}(w)=-\tfrac{1}{2}w^{\prime}\Sigma w$
and, for
 $1<\alpha<2$
,
$1<\alpha<2$
,
 $\psi_{\alpha}$
is given by (2.4), where
$\psi_{\alpha}$
is given by (2.4), where
 $\lambda$
is replaced by
$\lambda$
is replaced by
 $\bar{\lambda}({{\mathrm{d}}} u)=\alpha K(u)\lambda({{\mathrm{d}}} u)$
.
$\bar{\lambda}({{\mathrm{d}}} u)=\alpha K(u)\lambda({{\mathrm{d}}} u)$
.
Lemma 4.3. Let
 $\psi$
be the characteristic exponent of a homogeneous Lévy basis with triplet
$\psi$
be the characteristic exponent of a homogeneous Lévy basis with triplet
 $(\gamma,\Sigma,\nu)$
. Then we have the following.
$(\gamma,\Sigma,\nu)$
. Then we have the following.
-
(i) If Assumption
${\mathbf{A}}_\alpha$
holds for some
$1<\alpha\leq2$
, then, as
$r\downarrow0$
,
\begin{equation*}r\psi\big(r^{-1/\alpha}w\big)\rightarrow\psi_{\alpha}(w). \end{equation*}
-
(ii) When
$\Sigma=0$
and
$\int_{\mathbb{R}^{m}}(1\land\| x\| )\nu({{\mathrm{d}}} x)<\infty$
, as
$r\downarrow0$
,
\[r \psi\big(r^{-1/\alpha}w\big)\rightarrow\mathbf{i} \gamma_{0}\cdot w.\]








Proof. We will only concentrate on the case where Assumption
 ${\mathbf{A}}_\alpha$
is satisfied for some
${\mathbf{A}}_\alpha$
is satisfied for some
 $1<\alpha<2$
(the other cases are well known). In this situation, we can write, for
$1<\alpha<2$
(the other cases are well known). In this situation, we can write, for
 $\tau(x)=\mathbf{1}_{\| x\| \leq1}+(1/\| x\| )\mathbf{1}_{\| x\| >1}$
,
$\tau(x)=\mathbf{1}_{\| x\| \leq1}+(1/\| x\| )\mathbf{1}_{\| x\| >1}$
,
 \[r\psi\big(r^{-1/\alpha}w \big)=\mathbf{i}\gamma_{r}\cdot w+\int_{\mathbb{R}^{m}\backslash\{0\}}\big({{\mathrm{e}}}^{\mathbf{i}w\cdot x}-1-\mathbf{i}w\cdot x\tau(x)\big)\nu_{r}({{\mathrm{d}}} x),\]
\[r\psi\big(r^{-1/\alpha}w \big)=\mathbf{i}\gamma_{r}\cdot w+\int_{\mathbb{R}^{m}\backslash\{0\}}\big({{\mathrm{e}}}^{\mathbf{i}w\cdot x}-1-\mathbf{i}w\cdot x\tau(x)\big)\nu_{r}({{\mathrm{d}}} x),\]
where
 \[\gamma_{r}=r^{1-1/\alpha}\gamma+\int_{1<\|x\|\leq r^{-1/\alpha}}\dfrac{x}{\|x\|}(1-\|x\|)\nu_{r}({{\mathrm{d}}} x)+\int_{\|x\|>r^{-1/\alpha}}\dfrac{x}{\|x\|}\nu_{r}({{\mathrm{d}}} x), \]
\[\gamma_{r}=r^{1-1/\alpha}\gamma+\int_{1<\|x\|\leq r^{-1/\alpha}}\dfrac{x}{\|x\|}(1-\|x\|)\nu_{r}({{\mathrm{d}}} x)+\int_{\|x\|>r^{-1/\alpha}}\dfrac{x}{\|x\|}\nu_{r}({{\mathrm{d}}} x), \]
and
 $\nu_{r}({{\mathrm{d}}} x) = r\nu(r^{1/\alpha}\,{{\mathrm{d}}} x)$
. According to Theorem 8.7 in [Reference Sato39], we are left to check that
$\nu_{r}({{\mathrm{d}}} x) = r\nu(r^{1/\alpha}\,{{\mathrm{d}}} x)$
. According to Theorem 8.7 in [Reference Sato39], we are left to check that
 \begin{align}\int_{\mathbb{R}^{m}}f(x)\nu_{r}({{\mathrm{d}}} x) & =r\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}f\big(r^{-1/\alpha}su\big)\rho_{u}({{\mathrm{d}}} s)\lambda({{\mathrm{d}}} u)\notag \\& \rightarrow\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}f(su)\dfrac{{{\mathrm{d}}} s}{s^{1+\alpha}}\bar{\lambda}({{\mathrm{d}}} u),\end{align}
\begin{align}\int_{\mathbb{R}^{m}}f(x)\nu_{r}({{\mathrm{d}}} x) & =r\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}f\big(r^{-1/\alpha}su\big)\rho_{u}({{\mathrm{d}}} s)\lambda({{\mathrm{d}}} u)\notag \\& \rightarrow\int_{\mathbb{S}^{m-1}}\int_{0}^{\infty}f(su)\dfrac{{{\mathrm{d}}} s}{s^{1+\alpha}}\bar{\lambda}({{\mathrm{d}}} u),\end{align}
for every continuous and bounded function f vanishing on a neighbourhood of
 $0\in\mathbb{R}^{m}$
, and that
$0\in\mathbb{R}^{m}$
, and that
 \begin{equation}\gamma_{r}\rightarrow\dfrac{\int_{\mathbb{S}^{m-1}}u\bar{\lambda}({{\mathrm{d}}} u)}{(1-\alpha)},\quad \lim_{\epsilon\downarrow0}\limsup_{r\downarrow0}\int_{\|x\|\leq\epsilon}(z\cdot x)^{2}\nu_{r}({{\mathrm{d}}} x)=0.\end{equation}
\begin{equation}\gamma_{r}\rightarrow\dfrac{\int_{\mathbb{S}^{m-1}}u\bar{\lambda}({{\mathrm{d}}} u)}{(1-\alpha)},\quad \lim_{\epsilon\downarrow0}\limsup_{r\downarrow0}\int_{\|x\|\leq\epsilon}(z\cdot x)^{2}\nu_{r}({{\mathrm{d}}} x)=0.\end{equation}
Set
 $\rho_{u,r}({{\mathrm{d}}} s)\,:\!=\, r\rho_{u}(r^{1/\alpha}\,{{\mathrm{d}}} s)$
and let
$\rho_{u,r}({{\mathrm{d}}} s)\,:\!=\, r\rho_{u}(r^{1/\alpha}\,{{\mathrm{d}}} s)$
and let
 $\zeta_{r,u}$
be a sequence of one-dimensional ID distributions with characteristic triplet
$\zeta_{r,u}$
be a sequence of one-dimensional ID distributions with characteristic triplet
 $(0,0,\rho_{u,r})$
. Equation (3.4) and Theorem 2 in [Reference Ivanovs17] imply that
$(0,0,\rho_{u,r})$
. Equation (3.4) and Theorem 2 in [Reference Ivanovs17] imply that
 $\zeta_{r,u}$
converges to a one-dimensional strictly
$\zeta_{r,u}$
converges to a one-dimensional strictly
 $\alpha$
-stable random variable with Lévy measure
$\alpha$
-stable random variable with Lévy measure
 \[\alpha K(u)\frac{{{\mathrm{d}}} s}{s^{1+\alpha}}\mathbf{1}_{s>0}.\]
\[\alpha K(u)\frac{{{\mathrm{d}}} s}{s^{1+\alpha}}\mathbf{1}_{s>0}.\]
Hence, for any function
 $g\,\colon \mathbb{R}\rightarrow\mathbb{R}$
continuous and bounded vanishing on a neighbourhood of
$g\,\colon \mathbb{R}\rightarrow\mathbb{R}$
continuous and bounded vanishing on a neighbourhood of
 $0\in\mathbb{R}$
, it holds that for
$0\in\mathbb{R}$
, it holds that for
 $\lambda$
-a.e.
$\lambda$
-a.e.
 $u\in\mathbb{S}^{m-1}$
$u\in\mathbb{S}^{m-1}$
 \begin{equation}\int_{0}^{\infty}g(s)\rho_{u,r}({{\mathrm{d}}} s)\rightarrow\int_{0}^{\infty}g(s)\dfrac{{{\mathrm{d}}} s}{s^{1+\alpha}}\alpha K(u),\end{equation}
\begin{equation}\int_{0}^{\infty}g(s)\rho_{u,r}({{\mathrm{d}}} s)\rightarrow\int_{0}^{\infty}g(s)\dfrac{{{\mathrm{d}}} s}{s^{1+\alpha}}\alpha K(u),\end{equation}
thanks to the one-dimensional version of Theorem 8.7 in [Reference Sato39]. The convergence in (4.30) now follows by applying (4.32) to the function
 $g(s)=f(su)$
along with (3.5) and the Dominated Convergence Theorem. On the other hand, from (3.5) and Tonelli’s theorem, we deduce that, for all
$g(s)=f(su)$
along with (3.5) and the Dominated Convergence Theorem. On the other hand, from (3.5) and Tonelli’s theorem, we deduce that, for all
 $\epsilon>0$
,
$\epsilon>0$
,
 \[\int_{\| x\| \leq\epsilon}(z\cdot x)^{2}\nu_{r}({{\mathrm{d}}} x)\leq C\int_{0}^{\epsilon}\int_{\mathbb{S}^{m-1}}r\rho_{u}\big(r^{1/\alpha}y,+\infty \big)\lambda({{\mathrm{d}}} u)y\,{{\mathrm{d}}} y\leq C\int_{0}^{\epsilon}y^{1-\alpha}\,{{\mathrm{d}}} y,\]
\[\int_{\| x\| \leq\epsilon}(z\cdot x)^{2}\nu_{r}({{\mathrm{d}}} x)\leq C\int_{0}^{\epsilon}\int_{\mathbb{S}^{m-1}}r\rho_{u}\big(r^{1/\alpha}y,+\infty \big)\lambda({{\mathrm{d}}} u)y\,{{\mathrm{d}}} y\leq C\int_{0}^{\epsilon}y^{1-\alpha}\,{{\mathrm{d}}} y,\]
from which the second part of (4.31) follows trivially. Similar arguments give us that
 \begin{align*}\gamma_{r}&=-\int_{\mathbb{S}^{m-1}}u\biggl( \int_{1}^{r^{-1/\alpha}}r\rho_{u}\big((r^{1/\alpha}y,1]\big)\,{{\mathrm{d}}} y\biggr) \lambda({{\mathrm{d}}} u)+\mathrm{o}(1)\\&\rightarrow-\int_{\mathbb{S}^{m-1}}u\alpha K(u)\int_{1}^{\infty}\dfrac{{{\mathrm{d}}} y}{y^{\alpha}}\lambda({{\mathrm{d}}} u),\end{align*}
\begin{align*}\gamma_{r}&=-\int_{\mathbb{S}^{m-1}}u\biggl( \int_{1}^{r^{-1/\alpha}}r\rho_{u}\big((r^{1/\alpha}y,1]\big)\,{{\mathrm{d}}} y\biggr) \lambda({{\mathrm{d}}} u)+\mathrm{o}(1)\\&\rightarrow-\int_{\mathbb{S}^{m-1}}u\alpha K(u)\int_{1}^{\infty}\dfrac{{{\mathrm{d}}} y}{y^{\alpha}}\lambda({{\mathrm{d}}} u),\end{align*}
as required.
Remark 4.2. For every
 $1\leq\alpha\leq2$
, let
$1\leq\alpha\leq2$
, let
 $\Upsilon_{\alpha}$
denote a homogeneous Lévy basis satisfying the following:
$\Upsilon_{\alpha}$
denote a homogeneous Lévy basis satisfying the following:
-
(i)
$\Upsilon_{\alpha}$
is purely Gaussian with covariance matrix
$\Sigma$
if
$\alpha=2$
, -
(ii)
$\Upsilon_\alpha=\gamma_{0}\mathrm{Leb}$
, when
$\alpha=1$
, -
(iii) for
$1<\alpha<2$
,
$\Upsilon_{\alpha}$
is strictly
$\alpha$
-stable with spectral measure
$\bar{\lambda}({{\mathrm{d}}} u) =\alpha K(u) \lambda({{\mathrm{d}}} u) $
, with K as in Assumption
${\mathbf{A}}_\alpha$
.










Let
 $\Xi_{r}^{\alpha}(\mathbf{T},f)$
be as in (4.10) but with L replaced by
$\Xi_{r}^{\alpha}(\mathbf{T},f)$
be as in (4.10) but with L replaced by
 $\Upsilon_\alpha$
. We claim that if the assumptions of Lemma 4.3 hold, then as
$\Upsilon_\alpha$
. We claim that if the assumptions of Lemma 4.3 hold, then as
 $r\downarrow0$
,
$r\downarrow0$
,
 \[\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\biggr)=\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}^{\alpha}(\mathbf{T},f)\biggr)+ \mathrm{o}(1).\]
\[\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\biggr)=\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}^{\alpha}(\mathbf{T},f)\biggr)+ \mathrm{o}(1).\]
Indeed, the above lemma and Theorem 5.3 in [Reference Kallenberg19] reveal that
 $r\psi(r^{-1/\alpha}\cdot)\rightarrow\psi_{\alpha}({\cdot})$
uniformly on bounded sets of
$r\psi(r^{-1/\alpha}\cdot)\rightarrow\psi_{\alpha}({\cdot})$
uniformly on bounded sets of
 ${\mathbb{R}}^d$
. Here
${\mathbb{R}}^d$
. Here
 $\psi_{\alpha}$
denotes the characteristic exponent of
$\psi_{\alpha}$
denotes the characteristic exponent of
 $\Upsilon_\alpha$
. Set
$\Upsilon_\alpha$
. Set
 \[\mathcal{E}_r(z)\,:\!=\, \mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\biggr)-\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}^{\alpha}(\mathbf{T},f)\biggr),\]
\[\mathcal{E}_r(z)\,:\!=\, \mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}(\mathbf{T},f)\biggr)-\mathcal{C}\biggl(z\ddagger\dfrac{1}{r^{1/\alpha}}\Xi_{r}^{\alpha}(\mathbf{T},f)\biggr),\]
and note that
 \[\mathcal{E}_r(z)=\dfrac{1}{r}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}\bigl[r\psi\bigl(r^{-1/\alpha}zI_{\mathbf{T},f}^{r}(q)\bigr)-\psi_{\alpha}\bigl(zI_{\mathbf{T},f}^{r}(q)\bigr)\bigr]\,{{\mathrm{d}}} q,\]
\[\mathcal{E}_r(z)=\dfrac{1}{r}\int_{A\backslash(\cap_{k=1}^{n}A\ominus rt_{k}M)}\bigl[r\psi\bigl(r^{-1/\alpha}zI_{\mathbf{T},f}^{r}(q)\bigr)-\psi_{\alpha}\bigl(zI_{\mathbf{T},f}^{r}(q)\bigr)\bigr]\,{{\mathrm{d}}} q,\]
where
 $I_{\mathbf{T},f}^{r}(q)$
as in (4.16). Thanks to the continuity of F,
$I_{\mathbf{T},f}^{r}(q)$
as in (4.16). Thanks to the continuity of F,
 $I_{\mathbf{T},f}^{r}(q)\mathbf{1}_A(q)$
is uniformly bounded over r. Thus, if
$I_{\mathbf{T},f}^{r}(q)\mathbf{1}_A(q)$
is uniformly bounded over r. Thus, if
 $B_z\subset{\mathbb{R}}^d$
is any bounded set containing
$B_z\subset{\mathbb{R}}^d$
is any bounded set containing
 $\{zI_{\mathbf{T},f}^{r}(q),q\in A\}$
, the observations made above let us conclude that, as
$\{zI_{\mathbf{T},f}^{r}(q),q\in A\}$
, the observations made above let us conclude that, as
 $r\downarrow0$
,
$r\downarrow0$
,
 \[\rvert\mathcal{E}_r(z)\rvert\leq \sup_{x\in B_z} \big\rVert r\psi\big(r^{-1/\alpha}x\big)-\psi_{\alpha}(x)\big\rVert\times \dfrac{1}{r}\sum_{k=1}^{n}\mathrm{Leb}(A\backslash A\ominus rt_{k}M)\rightarrow0,\]
\[\rvert\mathcal{E}_r(z)\rvert\leq \sup_{x\in B_z} \big\rVert r\psi\big(r^{-1/\alpha}x\big)-\psi_{\alpha}(x)\big\rVert\times \dfrac{1}{r}\sum_{k=1}^{n}\mathrm{Leb}(A\backslash A\ominus rt_{k}M)\rightarrow0,\]
as claimed. A similar approximation is valid for
 $\Phi_{r}(\mathbf{T},f)$
.
$\Phi_{r}(\mathbf{T},f)$
.
4.4. A useful identity
Recall the notation
 $d_{A}(q)\,:\!=\, \inf_{p\in A}\| p-q\| $
as well as the fact that
$d_{A}(q)\,:\!=\, \inf_{p\in A}\| p-q\| $
as well as the fact that
 $\mathfrak{D}\subseteq\mathbb{R}^{d}$
represents a bounded Lipschitz domain whose boundary M is a
$\mathfrak{D}\subseteq\mathbb{R}^{d}$
represents a bounded Lipschitz domain whose boundary M is a
 $(d-1)$
-dimensional compact manifold. For every
$(d-1)$
-dimensional compact manifold. For every
 $t>0$
, set
$t>0$
, set
 \[g_{t}(s,x,n)\,:\!=\, \int_{M}u_{M}(y)\mathbf{1}_{[h_{M}(n)s,+\infty)}(ty\cdot n)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\mathbf{1}_{0<s<t}.\]
\[g_{t}(s,x,n)\,:\!=\, \int_{M}u_{M}(y)\mathbf{1}_{[h_{M}(n)s,+\infty)}(ty\cdot n)\mathcal{H}^{d-1}({{\mathrm{d}}} y)\mathbf{1}_{0<s<t}.\]
In the following result, we find a semi-explicit representation of
 $g_{t}$
.
$g_{t}$
.
Proposition 4.1. Suppose that
 $\mathfrak{D}\neq\emptyset$
is smooth and convex. Then, for
$\mathfrak{D}\neq\emptyset$
is smooth and convex. Then, for
 $\mu^{\pm}_{M,A}$
-a.e.
$\mu^{\pm}_{M,A}$
-a.e.
 $(s,x,n) \in \mathbb{R}^{+} \times \mathbb{R}^{d} \times \mathbb{S}^{d-1}$
,
$(s,x,n) \in \mathbb{R}^{+} \times \mathbb{R}^{d} \times \mathbb{S}^{d-1}$
,
 \begin{equation}g_{t}(s,x,n)=n\mathcal{H}^{d-1}(\mathfrak{D}\cap\mathfrak{H}(h_{M}(n)s/t,n))\mathbf{1}_{0 < s < t},\end{equation}
\begin{equation}g_{t}(s,x,n)=n\mathcal{H}^{d-1}(\mathfrak{D}\cap\mathfrak{H}(h_{M}(n)s/t,n))\mathbf{1}_{0 < s < t},\end{equation}
where
 $\mathfrak{H}(\ell,n) \,:\!=\, \{y\in\mathbb{R}^{d}\,\colon y\cdot n=\ell\}$
.
$\mathfrak{H}(\ell,n) \,:\!=\, \{y\in\mathbb{R}^{d}\,\colon y\cdot n=\ell\}$
.
Proof. Set
 \begin{align*}N & = \{(s,x,n)\,\colon \mathcal{H}^{d-2} (M\cap\mathfrak{H}(h_{M}(n)s/t,n))=+\infty,s\geq0\}\\& =\{(s,x,n)\,\colon \mathcal{H}^{d-2}(M\cap\mathfrak{H}(h_{M}(n)s/t,n))=+\infty,0\leq s\leq t\},\end{align*}
\begin{align*}N & = \{(s,x,n)\,\colon \mathcal{H}^{d-2} (M\cap\mathfrak{H}(h_{M}(n)s/t,n))=+\infty,s\geq0\}\\& =\{(s,x,n)\,\colon \mathcal{H}^{d-2}(M\cap\mathfrak{H}(h_{M}(n)s/t,n))=+\infty,0\leq s\leq t\},\end{align*}
where the second identity follows by the definition of the support function. By Tonelli’s theorem and Theorem 10.10 in [Reference Mattila25], N is a
 $\mu^{\pm}_{M,A}$
-null set. Let us now verify that (4.33) is valid for every
$\mu^{\pm}_{M,A}$
-null set. Let us now verify that (4.33) is valid for every
 $(s,x,n)\in N^{c}$
such that
$(s,x,n)\in N^{c}$
such that
 $h_{M}(n)>0$
and
$h_{M}(n)>0$
and
 $t>s>0$
. For such a triplet (s, x, n), we have
$t>s>0$
. For such a triplet (s, x, n), we have
 $h_{M}(n)>\ell\,:\!=\, h_{M}(n)s/t>0$
and
$h_{M}(n)>\ell\,:\!=\, h_{M}(n)s/t>0$
and
 \begin{equation}\mathcal{H}^{d-1}(M\cap\mathfrak{H}(\ell,n))=0.\end{equation}
\begin{equation}\mathcal{H}^{d-1}(M\cap\mathfrak{H}(\ell,n))=0.\end{equation}
Now put
 $\mathscr{H}^{\;\,+}\,:\!=\, \{y\in\mathbb{R}^{d}\,\colon y\cdot n>\ell\}$
and define
$\mathscr{H}^{\;\,+}\,:\!=\, \{y\in\mathbb{R}^{d}\,\colon y\cdot n>\ell\}$
and define
 $\mathfrak{D}_{\ell,n}=\mathfrak{D}\cap\mathscr{H}^{\;\,+}$
.
$\mathfrak{D}_{\ell,n}=\mathfrak{D}\cap\mathscr{H}^{\;\,+}$
.
 $\mathfrak{D}_{\ell,n}$
is an open bounded convex set. Since the boundary of a convex set is locally the graph of a convex function, it follows that
$\mathfrak{D}_{\ell,n}$
is an open bounded convex set. Since the boundary of a convex set is locally the graph of a convex function, it follows that
 $\mathfrak{D}_{\ell,n}$
is a Lipschitz domain. Therefore, by the Divergence Theorem for Lipschitz domains (see Theorem 5.8.1 in [Reference Evans and Gariepy9] and its succeeding remark), along with Proposition 4.1.2 in [Reference Pfeffer30], we deduce that
$\mathfrak{D}_{\ell,n}$
is a Lipschitz domain. Therefore, by the Divergence Theorem for Lipschitz domains (see Theorem 5.8.1 in [Reference Evans and Gariepy9] and its succeeding remark), along with Proposition 4.1.2 in [Reference Pfeffer30], we deduce that
 \begin{equation}\mathbf{0}=\int_{\partial\mathfrak{D}_{\ell,n}}u_{\mathfrak{D}_{\ell,n}}(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y),\end{equation}
\begin{equation}\mathbf{0}=\int_{\partial\mathfrak{D}_{\ell,n}}u_{\mathfrak{D}_{\ell,n}}(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y),\end{equation}
where
 $u_{\mathfrak{D}_{\ell,n}}$
is the unit outward vector of
$u_{\mathfrak{D}_{\ell,n}}$
is the unit outward vector of
 $\mathfrak{D}_{\ell,n}$
. Next, we claim that the set
$\mathfrak{D}_{\ell,n}$
. Next, we claim that the set
 \[\mathfrak{V}\,:\!=\, (M\cap\mathscr{H}^{\;\,+})\cup(\mathfrak{D}\cap\mathfrak{H}(\ell,n))\]
\[\mathfrak{V}\,:\!=\, (M\cap\mathscr{H}^{\;\,+})\cup(\mathfrak{D}\cap\mathfrak{H}(\ell,n))\]
belongs to
 $\partial\mathfrak{D}_{\ell,n}$
, and
$\partial\mathfrak{D}_{\ell,n}$
, and
 \begin{equation}\mathcal{H}^{d-1}(\partial\mathfrak{D}_{\ell,n}\setminus\mathfrak{V})=0.\end{equation}
\begin{equation}\mathcal{H}^{d-1}(\partial\mathfrak{D}_{\ell,n}\setminus\mathfrak{V})=0.\end{equation}
If this were true, we would have from (4.34) and (4.35)
 \begin{equation}\int_{M}u_{\mathfrak{D}_{\ell,n}}(y)\mathbf{1}_{[\ell,+\infty)}(y\cdot n)\mathcal{H}^{d-1}({{\mathrm{d}}} y)=-\int_{\mathfrak{D}\cap\mathfrak{H}(\ell,n)}u_{\mathfrak{D}_{\ell,n}}(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{equation}
\begin{equation}\int_{M}u_{\mathfrak{D}_{\ell,n}}(y)\mathbf{1}_{[\ell,+\infty)}(y\cdot n)\mathcal{H}^{d-1}({{\mathrm{d}}} y)=-\int_{\mathfrak{D}\cap\mathfrak{H}(\ell,n)}u_{\mathfrak{D}_{\ell,n}}(y)\mathcal{H}^{d-1}({{\mathrm{d}}} y).\end{equation}
Graphical representation of the set
 $\mathfrak{D}_{\ell,n}$
. The dotted and dashed curves, respectively, depict the region of integration
$\mathfrak{D}_{\ell,n}$
. The dotted and dashed curves, respectively, depict the region of integration
 $\{y\in M\,\colon y\cdot n\geq\ell\}$
and the set
$\{y\in M\,\colon y\cdot n\geq\ell\}$
and the set
 $\mathfrak{D}\cap\mathfrak{H}(\ell,n)$
.
$\mathfrak{D}\cap\mathfrak{H}(\ell,n)$
.

But, by construction and convexity (see Figure 1),
 \[u_{\mathfrak{D}_{\ell,n}}(y)=\begin{cases}u_{M}(y)& \text{if $ y\in M\cap\mathscr{H}^{\;\,+}$,}\\ -n & \text{if $ y\in \mathfrak{D}\cap\mathfrak{H}(\ell,n)$.}\end{cases}\]
\[u_{\mathfrak{D}_{\ell,n}}(y)=\begin{cases}u_{M}(y)& \text{if $ y\in M\cap\mathscr{H}^{\;\,+}$,}\\ -n & \text{if $ y\in \mathfrak{D}\cap\mathfrak{H}(\ell,n)$.}\end{cases}\]
Relation (4.33) would be obtained by plugging the above identity into (4.37). Now, using the fact that
 $\mathscr{H}^{\;\,+}$
and
$\mathscr{H}^{\;\,+}$
and
 $\mathfrak{D}$
are open, one easily deduces that
$\mathfrak{D}$
are open, one easily deduces that
 $\mathfrak{V}$
is contained on
$\mathfrak{V}$
is contained on
 $\partial\mathfrak{D}_{\ell,n}$
. Finally, to see that (4.36) is satisfied, let us first recall that for any sets
$\partial\mathfrak{D}_{\ell,n}$
. Finally, to see that (4.36) is satisfied, let us first recall that for any sets
 $E,F\subset\mathbb{R}^d$
it holds that (i)
$E,F\subset\mathbb{R}^d$
it holds that (i)
 $d_{E}(q)=d_{\bar{E}}(q)$
, (ii)
$d_{E}(q)=d_{\bar{E}}(q)$
, (ii)
 $d_{E}(q)=0$
if and only if
$d_{E}(q)=0$
if and only if
 $q\in\bar{E}$
, (iii)
$q\in\bar{E}$
, (iii)
 $d_{E\cap F}(q)\geq\max\{d_{E}(q),d_{F}(q)\}$
. Using these properties and the fact that
$d_{E\cap F}(q)\geq\max\{d_{E}(q),d_{F}(q)\}$
. Using these properties and the fact that
 $\mathfrak{D}_{\ell,n}$
is open, we conclude that the set
$\mathfrak{D}_{\ell,n}$
is open, we conclude that the set
 $\mathcal{O}=(\bar{\mathscr{H}^{\;\,+}})^c\cup(\bar{\mathscr{H}^{\;\,+}}\cap\bar{\mathfrak{D}}^c)\cup\mathfrak{D}_{\ell,n}$
cannot belong to the boundary of
$\mathcal{O}=(\bar{\mathscr{H}^{\;\,+}})^c\cup(\bar{\mathscr{H}^{\;\,+}}\cap\bar{\mathfrak{D}}^c)\cup\mathfrak{D}_{\ell,n}$
cannot belong to the boundary of
 $\mathfrak{D}_{\ell,n}$
. Furthermore,
$\mathfrak{D}_{\ell,n}$
. Furthermore,
 \[\mathcal{O}^c=\mathfrak{V}\cup(M\cap\mathfrak{H}(\ell,n)) \quad\text{and}\quad \mathfrak{V}\cap(M\cap\mathfrak{H}(\ell,n))=\emptyset.\]
\[\mathcal{O}^c=\mathfrak{V}\cup(M\cap\mathfrak{H}(\ell,n)) \quad\text{and}\quad \mathfrak{V}\cap(M\cap\mathfrak{H}(\ell,n))=\emptyset.\]
Hence
 \[\partial\mathfrak{D}_{\ell,n}=\mathfrak{V}\cup(\partial\mathfrak{D}_{\ell,n}\cap(M\cap\mathfrak{H}(\ell,n))),\]
\[\partial\mathfrak{D}_{\ell,n}=\mathfrak{V}\cup(\partial\mathfrak{D}_{\ell,n}\cap(M\cap\mathfrak{H}(\ell,n))),\]
from which (4.36) readily follows.
Acknowledgements
Dedicated to the memory of Ole E. Barndorff-Nielsen (1935-2022). Revisions and final approval of this work were carried out after José Ulises Márquez Urbina joined the Universidad Carlos III de Madrid.
Funding information
José Ulises Márquez Urbina acknowledges partial funding from project CBF2023-2024-3976.
Competing interests
There were no competing interests to declare which arose during the preparation or publication process of this article.

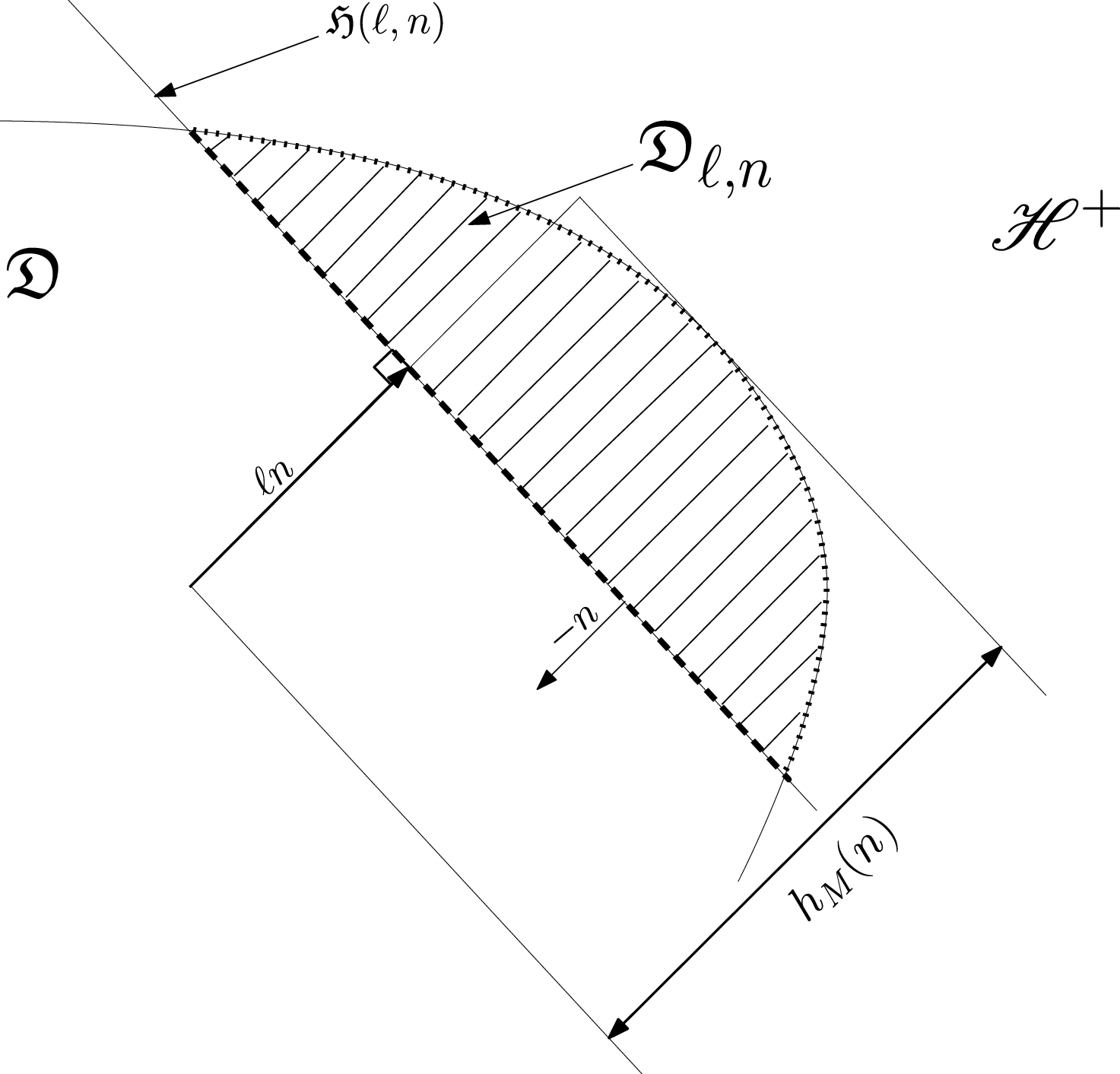




 Open access
Open access