





1. Introduction
Consecutive  $k$-type systems [Reference Koutras, Papadopoulos and Papastavridis15] are well-known generalizations of
$k$-type systems [Reference Koutras, Papadopoulos and Papastavridis15] are well-known generalizations of  $k$-out-of-
$k$-out-of- $n$ systems, and they have been studied extensively with regard to the development of associated reliability theory and its practical implementation [Reference Balakrishnan, Dafnis and Makri2, Reference Balakrishnan, Koutras and Milienos3, Reference Chang, Cui and Hwang6, Reference Cowell8, Reference Da and Ding10]. Many different aspects of consecutive
$n$ systems, and they have been studied extensively with regard to the development of associated reliability theory and its practical implementation [Reference Balakrishnan, Dafnis and Makri2, Reference Balakrishnan, Koutras and Milienos3, Reference Chang, Cui and Hwang6, Reference Cowell8, Reference Da and Ding10]. Many different aspects of consecutive  $k$-type systems have been investigated, including definitions of new systems, evaluation of system reliability, optimal system design and component importance. Multi-state systems containing different performance levels and failure modes (see [Reference Kontoleon14, Reference Malinowski and Preuss18, Reference Ozkut, Kan and Franko20–Reference Preuss22]) have also been discussed in the framework of consecutive
$k$-type systems have been investigated, including definitions of new systems, evaluation of system reliability, optimal system design and component importance. Multi-state systems containing different performance levels and failure modes (see [Reference Kontoleon14, Reference Malinowski and Preuss18, Reference Ozkut, Kan and Franko20–Reference Preuss22]) have also been discussed in the framework of consecutive  $k$-type systems [Reference Godbole, Potter and Sklar12, Reference Yi, Cui and Balakrishnan33, Reference Yi, Cui and Gao34].
$k$-type systems [Reference Godbole, Potter and Sklar12, Reference Yi, Cui and Balakrishnan33, Reference Yi, Cui and Gao34].
Compared to the usual/simpler one-dimensional consecutive  $k$-type systems, multi-dimensional ones are commonly encountered in many practical situations [Reference Boehme, Kossow and Preuss4, Reference Chang and Huang7, Reference Kuo and Zhu16, Reference Yamamoto and Miyakawa28, Reference Zuo, Lin and Wu36]. For example, traditional communication systems used to consider stations arranged only in one-dimensional linear and circular structures. But nowadays, it is more common to see two/three-dimensional spaces due to expanding technology. Many examples can also be found in integrated circuit systems, low-altitude traffic systems, medical testing systems, and different types of network systems. However, very few works have dealt with two-dimensional consecutive
$k$-type systems, multi-dimensional ones are commonly encountered in many practical situations [Reference Boehme, Kossow and Preuss4, Reference Chang and Huang7, Reference Kuo and Zhu16, Reference Yamamoto and Miyakawa28, Reference Zuo, Lin and Wu36]. For example, traditional communication systems used to consider stations arranged only in one-dimensional linear and circular structures. But nowadays, it is more common to see two/three-dimensional spaces due to expanding technology. Many examples can also be found in integrated circuit systems, low-altitude traffic systems, medical testing systems, and different types of network systems. However, very few works have dealt with two-dimensional consecutive  $k$-type systems [Reference Natvig19, Reference Psillakis and Makri23, Reference Yamamoto and Akiba27, Reference Zhao, Cui, Zhao and Liu35], let alone three-dimensional ones, as stated by Yi et al. [Reference Yi, Balakrishnan and Li29–Reference Yi, Balakrishnan and Li32] and the works cited therein.
$k$-type systems [Reference Natvig19, Reference Psillakis and Makri23, Reference Yamamoto and Akiba27, Reference Zhao, Cui, Zhao and Liu35], let alone three-dimensional ones, as stated by Yi et al. [Reference Yi, Balakrishnan and Li29–Reference Yi, Balakrishnan and Li32] and the works cited therein.
For three-dimensional consecutive  $k$-type systems, very little work has been carried out until now. For example, Salvia and Lasher [Reference Samaniego25] mentioned
$k$-type systems, very little work has been carried out until now. For example, Salvia and Lasher [Reference Samaniego25] mentioned  $k^3/n^3$: F systems as one of the possible future directions without further discussion when they proposed
$k^3/n^3$: F systems as one of the possible future directions without further discussion when they proposed  $k^2/n^2$: F systems for the first time; Godbole et al. [Reference Huseby, Kalinowska and Abrahamsen13] studied linear
$k^2/n^2$: F systems for the first time; Godbole et al. [Reference Huseby, Kalinowska and Abrahamsen13] studied linear  $k^d/n^d$: F systems and discussed upper/lower bounds for their reliability functions by using Janson’s exponential inequalities, and one may also see [Reference Cui and Dong9] for discussions on related reliability formula based on the Inclusion-Exclusion Principle; Psillakis and Makri [Reference Salvia and Lasher24] discussed
$k^d/n^d$: F systems and discussed upper/lower bounds for their reliability functions by using Janson’s exponential inequalities, and one may also see [Reference Cui and Dong9] for discussions on related reliability formula based on the Inclusion-Exclusion Principle; Psillakis and Makri [Reference Salvia and Lasher24] discussed  $d$-dimensional consecutive-
$d$-dimensional consecutive- $k$-out-of-
$k$-out-of- $r$-from-
$r$-from- $n$: F systems and their reliability evaluation in the three-dimensional case through a simulation study; Boushaba and Ghoraf [Reference Boushaba and Ghoraf5] further considered the
$n$: F systems and their reliability evaluation in the three-dimensional case through a simulation study; Boushaba and Ghoraf [Reference Boushaba and Ghoraf5] further considered the  $k^3/n^3$: F systems and their reliability by the use of an upper/lower bound method and a limiting method; Akiba and Yamamoto [Reference Akiba, Yamamoto, Dohi and Yun1] discussed 3-dimensional
$k^3/n^3$: F systems and their reliability by the use of an upper/lower bound method and a limiting method; Akiba and Yamamoto [Reference Akiba, Yamamoto, Dohi and Yun1] discussed 3-dimensional  $k$-within-consecutive-
$k$-within-consecutive- $(r_1, r_2, r_3)$-out-of-
$(r_1, r_2, r_3)$-out-of- $(n_1, n_2, n_3)$: F systems and obtained simple lower bounds for their reliability functions; Yi et al. [Reference Yi, Balakrishnan and Li29] generalized the two-dimensional consecutive
$(n_1, n_2, n_3)$: F systems and obtained simple lower bounds for their reliability functions; Yi et al. [Reference Yi, Balakrishnan and Li29] generalized the two-dimensional consecutive  $k$-type systems in Yi et al. [Reference Yi, Balakrishnan and Li30] to three-dimensional ones, and then evaluated the reliability functions of these systems based on finite Markov chain imbedding approach in a creative way.
$k$-type systems in Yi et al. [Reference Yi, Balakrishnan and Li30] to three-dimensional ones, and then evaluated the reliability functions of these systems based on finite Markov chain imbedding approach in a creative way.
The above three-dimensional consecutive  $k$-type systems are all binary-state ones, namely, these systems and their components have only two possible states—perfect functioning state and complete failure state. To the best of our knowledge, no research exists on multi-state three-dimensional consecutive
$k$-type systems are all binary-state ones, namely, these systems and their components have only two possible states—perfect functioning state and complete failure state. To the best of our knowledge, no research exists on multi-state three-dimensional consecutive  $k$-type systems until now. However, practical reliability systems often have more states than just perfect functioning and complete failure due to reasons such as degradation and aging. In this work, we introduce and study several different types of three-dimensional consecutive
$k$-type systems until now. However, practical reliability systems often have more states than just perfect functioning and complete failure due to reasons such as degradation and aging. In this work, we introduce and study several different types of three-dimensional consecutive  $k$-type systems by generalizing the binary-state systems in [Reference Yi, Balakrishnan and Li29] to the multi-state case, namely, multi-state linear connected-
$k$-type systems by generalizing the binary-state systems in [Reference Yi, Balakrishnan and Li29] to the multi-state case, namely, multi-state linear connected- $(\boldsymbol{k}_1,\boldsymbol{k}_2,\boldsymbol{k}_3)$-out-of-
$(\boldsymbol{k}_1,\boldsymbol{k}_2,\boldsymbol{k}_3)$-out-of- $(n_1,n_2,n_3)$: G systems, multi-state linear connected-
$(n_1,n_2,n_3)$: G systems, multi-state linear connected- $(\boldsymbol{k}_1,\boldsymbol{k}_2,\boldsymbol{k}_3)!$-out-of-
$(\boldsymbol{k}_1,\boldsymbol{k}_2,\boldsymbol{k}_3)!$-out-of- $(n_1,n_2,n_3)$: G systems, multi-state linear
$(n_1,n_2,n_3)$: G systems, multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $(\boldsymbol{k}_1,\boldsymbol{k}_2,\boldsymbol{k}_3)$-out-of-
$(\boldsymbol{k}_1,\boldsymbol{k}_2,\boldsymbol{k}_3)$-out-of- $(n_1,n_2,n_3)$: G systems without/with overlapping, and multi-state linear
$(n_1,n_2,n_3)$: G systems without/with overlapping, and multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $(\boldsymbol{k}_1,\boldsymbol{k}_2,$
$(\boldsymbol{k}_1,\boldsymbol{k}_2,$  $\boldsymbol{k}_3)!$-out-of-
$\boldsymbol{k}_3)!$-out-of- $(n_1,n_2,n_3)$: G systems without/with overlapping. The reliability functions of these systems are also derived based on finite Markov chain imbedding approach with state spaces and transition matrices provided in a novel way.
$(n_1,n_2,n_3)$: G systems without/with overlapping. The reliability functions of these systems are also derived based on finite Markov chain imbedding approach with state spaces and transition matrices provided in a novel way.
The most significant and novel contributions of the research carried out here are as follows: (1) Several multi-state linear three-dimensional consecutive  $k$-type systems are proposed; (2) Overlapping/non-overlapping cases are taken into account for the failure blocks of these systems; (3) Reliability functions of these systems are derived by using FMCIA. The remainder of this paper is as follows. In Section 2, we introduce a finite Markov chain imbedding approach for evaluating the reliabilities of the proposed three-dimensional consecutive
$k$-type systems are proposed; (2) Overlapping/non-overlapping cases are taken into account for the failure blocks of these systems; (3) Reliability functions of these systems are derived by using FMCIA. The remainder of this paper is as follows. In Section 2, we introduce a finite Markov chain imbedding approach for evaluating the reliabilities of the proposed three-dimensional consecutive  $k$-type systems. In Section 3, the computational process is explained through several illustrative examples. Some concluding remarks are finally presented in Section 4, stating some possible applications to practical situations and also some extensions of the results developed here.
$k$-type systems. In Section 3, the computational process is explained through several illustrative examples. Some concluding remarks are finally presented in Section 4, stating some possible applications to practical situations and also some extensions of the results developed here.
2. Finite Markov chain imbedding approach
In this section, we introduce and study three-dimensional consecutive  $k$-type systems in the multi-state case by introducing several different types of systems. With state space for components and systems denoted by
$k$-type systems in the multi-state case by introducing several different types of systems. With state space for components and systems denoted by  $\{0,1, \ldots ,M\} $ (
$\{0,1, \ldots ,M\} $ ( $0$ for complete failure and
$0$ for complete failure and  $M$ for perfect functioning), for
$M$ for perfect functioning), for  ${{\boldsymbol{k}}_u} = (k_1^u, \ldots ,k_M^u){\rm{~}}(u=1,2,3)$ and
${{\boldsymbol{k}}_u} = (k_1^u, \ldots ,k_M^u){\rm{~}}(u=1,2,3)$ and  ${\boldsymbol{l}} = ({l_1}, \ldots ,{l_M})$, their precise definitions are as follows.
${\boldsymbol{l}} = ({l_1}, \ldots ,{l_M})$, their precise definitions are as follows.
Definition 1.1 A multi-state linear connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of- $({n_1},{n_2},{n_3})$: G system consists of
$({n_1},{n_2},{n_3})$: G system consists of  ${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state
${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state  $l$
$l$  $(l = 1, \ldots ,M)$ or above if “there exist
$(l = 1, \ldots ,M)$ or above if “there exist  $k_i^1 \times k_i^2 \times k_i^3$ consecutive components in state
$k_i^1 \times k_i^2 \times k_i^3$ consecutive components in state  $i$ or above (denoted by condition
$i$ or above (denoted by condition  $C_i$)”, for all
$C_i$)”, for all  $1 \le i \le l$.
$1 \le i \le l$.
Definition 1.2 A multi-state linear connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of- $({n_1},{n_2},{n_3})$: G system consists of
$({n_1},{n_2},{n_3})$: G system consists of  ${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state
${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state  $l$
$l$  $(l = 1, \ldots ,M)$ or above if “there exist
$(l = 1, \ldots ,M)$ or above if “there exist  $k_i^1 \times k_i^2 \times k_i^3$ or
$k_i^1 \times k_i^2 \times k_i^3$ or  $k_i^1 \times k_i^3 \times k_i^2$ or
$k_i^1 \times k_i^3 \times k_i^2$ or  $k_i^2 \times k_i^1 \times k_i^3$ or
$k_i^2 \times k_i^1 \times k_i^3$ or  $k_i^2 \times k_i^3 \times k_i^1$ or
$k_i^2 \times k_i^3 \times k_i^1$ or  $k_i^3 \times k_i^1 \times k_i^2$ or
$k_i^3 \times k_i^1 \times k_i^2$ or  $k_i^3 \times k_i^2 \times k_i^1$ consecutive components in state
$k_i^3 \times k_i^2 \times k_i^1$ consecutive components in state  $i$ or above (denoted by condition
$i$ or above (denoted by condition  $C_i$)”, for all
$C_i$)”, for all  $1 \le i \le l$.
$1 \le i \le l$.
Definition 1.3 A multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of- $({n_1},{n_2},{n_3})$: G system without/with overlapping consists of
$({n_1},{n_2},{n_3})$: G system without/with overlapping consists of  ${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state
${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state  $l$
$l$  $(l = 1, \ldots ,M)$ or above if “there exist
$(l = 1, \ldots ,M)$ or above if “there exist  $l_i$ non-overlapping/overlapping blocks of
$l_i$ non-overlapping/overlapping blocks of  $k_i^1 \times k_i^2 \times k_i^3$ consecutive components in state
$k_i^1 \times k_i^2 \times k_i^3$ consecutive components in state  $i$ or above (denoted by condition
$i$ or above (denoted by condition  $C_i$)”, for all
$C_i$)”, for all  $1 \le i \le l$.
$1 \le i \le l$.
Definition 1.4 A multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of- $({n_1},{n_2},{n_3})$: G system without/with overlapping consists of
$({n_1},{n_2},{n_3})$: G system without/with overlapping consists of  ${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state
${n_1} \times {n_2} \times {n_3}$ linearly ordered multi-state components. It is said to be in state  $l$
$l$  $(l = 1, \ldots ,M)$ or above if “there exist
$(l = 1, \ldots ,M)$ or above if “there exist  $l_i$ non-overlapping/overlapping blocks of
$l_i$ non-overlapping/overlapping blocks of  $k_i^1 \times k_i^2 \times k_i^3$ or
$k_i^1 \times k_i^2 \times k_i^3$ or  $k_i^1 \times k_i^3 \times k_i^2$ or
$k_i^1 \times k_i^3 \times k_i^2$ or  $k_i^2 \times k_i^1 \times k_i^3$ or
$k_i^2 \times k_i^1 \times k_i^3$ or  $k_i^2 \times k_i^3 \times k_i^1$ or
$k_i^2 \times k_i^3 \times k_i^1$ or  $k_i^3 \times k_i^1 \times k_i^2$ or
$k_i^3 \times k_i^1 \times k_i^2$ or  $k_i^3 \times k_i^2 \times k_i^1$ consecutive components in state
$k_i^3 \times k_i^2 \times k_i^1$ consecutive components in state  $i$ or above (denoted by condition
$i$ or above (denoted by condition  $C_i$)”, for all
$C_i$)”, for all  $1 \le i \le l$.
$1 \le i \le l$.
For a three-dimensional consecutive  $k$-type system as defined above, its reliability at level
$k$-type system as defined above, its reliability at level  $l$ can be defined as the probability that the system is in state
$l$ can be defined as the probability that the system is in state  $l$ or above, namely, if we denote the condition event for state
$l$ or above, namely, if we denote the condition event for state  $i$ as
$i$ as  $C_i$, then the reliability of the system at level
$C_i$, then the reliability of the system at level  $l$ can be denoted by
$l$ can be denoted by  $R=P\{C_1,\ldots, C_l\}$. For better understanding of the four definitions, some diagrams for the binary-state case can be found in Figs. 1–6 of Yi et al. [Reference Yi, Balakrishnan and Li29] and the differences in the four definitions are summarized in Table 1.
$R=P\{C_1,\ldots, C_l\}$. For better understanding of the four definitions, some diagrams for the binary-state case can be found in Figs. 1–6 of Yi et al. [Reference Yi, Balakrishnan and Li29] and the differences in the four definitions are summarized in Table 1.
Differences of the systems in Definitions 1.1–1.4.

Table 1 Long description
The table compares four system definitions by block type, number of blocks, where the FMCIA discussion appears, and which examples illustrate each definition. Definitions 1.1 and 1.2 both use one block, but they differ in block type and point to different FMCIA remark references. Definitions 1.3 and 1.4 both use a variable number of blocks labeled with the letter l, again differing by block type and by the FMCIA section and remark citations. For examples, 1.1 is linked to Examples 3.1 and 3.7, and 1.2 to Examples 3.2 and 3.8. Definition 1.3 is linked to Examples 3.3, 3.4, 3.9, and 3.10, while 1.4 is linked to Examples 3.5, 3.6, 3.11, and 3.12. Overall, the main pattern is that the first two definitions are single block cases, while the latter two cover multiple block cases, with corresponding shifts in the cited FMCIA locations and example groupings.
States of the finite Markov chain in Example 3.1 after each added component.

Table 2 Long description
The table lists a sequence of 12 components added to a finite Markov chain, giving the resulting state label and a corresponding two by four index matrix for each step. States take only two values, 1 or 2, and state 2 occurs more often than state 1. State 1 appears for components x 2,1,1; x 2,2,1; x 1,1,3; and x 1,2,3, while the other eight components are in state 2. Early matrices contain mostly zeros with a few ones, then later steps introduce higher counts, including twos and threes. Several of the final entries share the same matrix pattern with threes in the top row and zeros elsewhere, even though their state labels differ. The table provides stepwise snapshots rather than transition probabilities, so it supports comparison of states and matrix patterns across added components but not direct inference about likelihoods.
Here, under the assumption that component state distributions are independent with each other, we make use of FMCIA to obtain the reliability functions of the systems introduced in Definitions 1.1-1.4. Note that components are added in the same order as in Fig. 3 of Yi et al. [Reference Yi, Balakrishnan and Li29] to form the corresponding finite Markov chain for each system. Without loss of any generality, we assume that  $k_i^1 \le k_i^2 \le k_i^3$, for all
$k_i^1 \le k_i^2 \le k_i^3$, for all  $1 \le i \le M$, in Definitions 1.3 and 1.4. Moreover, when we consider the reliability function of the system at level
$1 \le i \le M$, in Definitions 1.3 and 1.4. Moreover, when we consider the reliability function of the system at level  $l$, viz., the probability that the system is in state
$l$, viz., the probability that the system is in state  $l$ or above, we can simply assume that there do not exist
$l$ or above, we can simply assume that there do not exist  $1 \le i \lt j \le l$ such that
$1 \le i \lt j \le l$ such that  $k_i^1 \le k_j^1,{\rm{~ }}k_i^2 \le k_j^2$ and
$k_i^1 \le k_j^1,{\rm{~ }}k_i^2 \le k_j^2$ and  $k_i^3 \le k_j^3$ in Definitions 1.1 and 1.2 and that there do not exist
$k_i^3 \le k_j^3$ in Definitions 1.1 and 1.2 and that there do not exist  $1 \le i \lt j \le l$ such that
$1 \le i \lt j \le l$ such that  ${l_i} \le {l_j},{\rm{~}}k_i^1 \le k_j^1,{\rm{~}}k_i^2 \le k_j^2$ and
${l_i} \le {l_j},{\rm{~}}k_i^1 \le k_j^1,{\rm{~}}k_i^2 \le k_j^2$ and  $k_i^3 \le k_j^3$ in Definitions 1.3 and 1.4. This is because if there exist such
$k_i^3 \le k_j^3$ in Definitions 1.3 and 1.4. This is because if there exist such  $i,j$, we can then remove state
$i,j$, we can then remove state  $i$ from the state space
$i$ from the state space  $\{0,1, \ldots ,M\} $ to simplify the considered problem.
$\{0,1, \ldots ,M\} $ to simplify the considered problem.
1.1. Multi-state linear connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({n_1},{n_2},$
${n_3})$: G system
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({n_1},{n_2},$
${n_3})$: G system



Denote the component in the  $i_1$th row,
$i_1$th row,  $i_2$th column and
$i_2$th column and  $i_3$th layer by
$i_3$th layer by  ${x_{{i_1},{i_2},{i_3}}}$
${x_{{i_1},{i_2},{i_3}}}$  $(1 \le {i_1} \le {n_1},{\rm{~}}1 \le {i_2} \le {n_2},{\rm{~}}1 \le {i_3} \le {n_3})$ and assume that it is in state
$(1 \le {i_1} \le {n_1},{\rm{~}}1 \le {i_2} \le {n_2},{\rm{~}}1 \le {i_3} \le {n_3})$ and assume that it is in state  $s$
$s$  $(s = 0,1, \ldots ,M)$ with probability
$(s = 0,1, \ldots ,M)$ with probability  $p_{{i_1},{i_2},{i_3}}^s$, where
$p_{{i_1},{i_2},{i_3}}^s$, where  $0 \le p_{{i_1},{i_2},{i_3}}^s \le 1$ and
$0 \le p_{{i_1},{i_2},{i_3}}^s \le 1$ and  $\sum\nolimits_{s = 0}^M {p_{{i_1},{i_2},{i_3}}^s} = 1$. Then, for the derivation of the reliability function of a multi-state linear connected-
$\sum\nolimits_{s = 0}^M {p_{{i_1},{i_2},{i_3}}^s} = 1$. Then, for the derivation of the reliability function of a multi-state linear connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of- $({n_1},{n_2},{n_3})$: G system, we construct a Markov chain
$({n_1},{n_2},{n_3})$: G system, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,{n_3}\} $ by incrementally adding components column by column (see Figs. 1–3 of Yi et al. [Reference Yi, Balakrishnan and Li29] for detailed explanations), whose state space is
$\{Y(t),t = 1, \ldots ,{n_3}\} $ by incrementally adding components column by column (see Figs. 1–3 of Yi et al. [Reference Yi, Balakrishnan and Li29] for detailed explanations), whose state space is
 \begin{align*}
S =& \{{\boldsymbol{i}} = ({i_{u,{v_1},{v_2}}},1 \le u \le M,{\rm{~}}1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2}):{\rm{0}} \le {i_{u,{v_1},{v_2}}} \le k_u^3{\rm{~for ~all~ }}{v_1},{v_2}, \cr
& \sum\nolimits_{{s_1} = {v_1} - {k_u^1} + 1}^{{v_1}}\sum\nolimits_{{s_2} = {v_2} - {k_u^2} + 1}^{{v_2}}{{{i_{u,{s_1},{s_2}}}} } \le k_u^1k_u^2k_u^3 - 1
{\rm{~for~ all~ }}{v_1} \ge k_u^1,{\rm{~}}{v_2} \ge k_u^2, \cr
&{\rm{~or ~}} {i_{u,1,1}} = k_u^3 + 1,{\rm{~}}{i_{u,{v_1},{v_2}}} = 0{\rm{~otherwise,~ for ~all ~}}u\} .
\end{align*}
\begin{align*}
S =& \{{\boldsymbol{i}} = ({i_{u,{v_1},{v_2}}},1 \le u \le M,{\rm{~}}1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2}):{\rm{0}} \le {i_{u,{v_1},{v_2}}} \le k_u^3{\rm{~for ~all~ }}{v_1},{v_2}, \cr
& \sum\nolimits_{{s_1} = {v_1} - {k_u^1} + 1}^{{v_1}}\sum\nolimits_{{s_2} = {v_2} - {k_u^2} + 1}^{{v_2}}{{{i_{u,{s_1},{s_2}}}} } \le k_u^1k_u^2k_u^3 - 1
{\rm{~for~ all~ }}{v_1} \ge k_u^1,{\rm{~}}{v_2} \ge k_u^2, \cr
&{\rm{~or ~}} {i_{u,1,1}} = k_u^3 + 1,{\rm{~}}{i_{u,{v_1},{v_2}}} = 0{\rm{~otherwise,~ for ~all ~}}u\} .
\end{align*} Note that state  ${\boldsymbol{i}} \in S$ represents the following for
${\boldsymbol{i}} \in S$ represents the following for  $1 \le u \le M$: if
$1 \le u \le M$: if  ${i_{u,1,1}} \le k_u^3$, there are
${i_{u,1,1}} \le k_u^3$, there are  ${i_{u,{v_1},{v_2}}}$ consecutive components in state
${i_{u,{v_1},{v_2}}}$ consecutive components in state  $u$ or above including component
$u$ or above including component  ${x_{{v_1},{v_2},t}}$ among the added components in the
${x_{{v_1},{v_2},t}}$ among the added components in the  $v_1$th row and
$v_1$th row and  $v_2$th column of the system
$v_2$th column of the system  $(1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2})$; and if
$(1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2})$; and if  ${i_{u,1,1}} = k_u^3 + 1$, there are
${i_{u,1,1}} = k_u^3 + 1$, there are  $k_u^1 \times k_u^2 \times k_u^3$ consecutive components in state
$k_u^1 \times k_u^2 \times k_u^3$ consecutive components in state  $u$ or above among all the added components. Furthermore, state
$u$ or above among all the added components. Furthermore, state  ${\boldsymbol{i}} \in S$ can now be relabeled as
${\boldsymbol{i}} \in S$ can now be relabeled as
 \begin{align*}
e({\boldsymbol{i}}) = &1 + \sum\limits_{u = 1}^M {\sum\limits_{{v_1} = 1}^{{n_1}} {\sum\limits_{{v_2} = 1}^{{n_2}} {\sum\limits_{{\boldsymbol{j}} \in S} {\left( {\prod\limits_{x = 1}^u {\prod\limits_{y = 1}^{{n_1} + ({v_1} - {n_1}){I_{\{x = u\} }}} } }
{\prod\limits_{z = 1}^{{n_2} + ({v_2} - {n_2} - 1){I_{\{x = u,y = {v_1}\} }}} {{I_{\{{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}} } \right)} } } } {\rm{~}}{I_{\{{i_{u,{v_1},{v_2}}} \gt {j_{u,{v_1},{v_2}}}\} }},\end{align*}
\begin{align*}
e({\boldsymbol{i}}) = &1 + \sum\limits_{u = 1}^M {\sum\limits_{{v_1} = 1}^{{n_1}} {\sum\limits_{{v_2} = 1}^{{n_2}} {\sum\limits_{{\boldsymbol{j}} \in S} {\left( {\prod\limits_{x = 1}^u {\prod\limits_{y = 1}^{{n_1} + ({v_1} - {n_1}){I_{\{x = u\} }}} } }
{\prod\limits_{z = 1}^{{n_2} + ({v_2} - {n_2} - 1){I_{\{x = u,y = {v_1}\} }}} {{I_{\{{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}} } \right)} } } } {\rm{~}}{I_{\{{i_{u,{v_1},{v_2}}} \gt {j_{u,{v_1},{v_2}}}\} }},\end{align*}and then state space  $S$ can be divided into
$S$ can be divided into  $M + 1$ subsets, with
$M + 1$ subsets, with  $S = {S_0} \cup {S_1} \cup \cdots \cup {S_M}$, where
$S = {S_0} \cup {S_1} \cup \cdots \cup {S_M}$, where  ${S_0} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} \le k_1^3} \right\}$ is a subset of
${S_0} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} \le k_1^3} \right\}$ is a subset of  $S$ that corresponds to the case when the system is in state
$S$ that corresponds to the case when the system is in state  $0$, and for
$0$, and for  $1 \le u \le M$,
$1 \le u \le M$,
 \begin{equation*}{S_u} = \left\{{\boldsymbol{i} \in S:{i_{1,1,1}} = k_1^3 + 1, \ldots ,{i_{u,1,1}} = k_u^3 + 1,{\rm{~}}{i_{u + 1,1,1}} \le k_u^3} \right\}\end{equation*}
\begin{equation*}{S_u} = \left\{{\boldsymbol{i} \in S:{i_{1,1,1}} = k_1^3 + 1, \ldots ,{i_{u,1,1}} = k_u^3 + 1,{\rm{~}}{i_{u + 1,1,1}} \le k_u^3} \right\}\end{equation*}is a subset of  $S$ that corresponds to the case when the system is in state
$S$ that corresponds to the case when the system is in state  $u$.
$u$.
With all these relabeled states, the Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ has its transition matrices as
$\{Y(t),t = 1, \ldots ,n\} $ has its transition matrices as  ${\boldsymbol{A}}(t) = \prod\nolimits_{{w_2} = 1}^{{n_2}} {\prod\nolimits_{{w_1} = 1}^{{n_1}} {{{\boldsymbol{A}}^{{w_1},{w_2}}}(t)} } $ for each step
${\boldsymbol{A}}(t) = \prod\nolimits_{{w_2} = 1}^{{n_2}} {\prod\nolimits_{{w_1} = 1}^{{n_1}} {{{\boldsymbol{A}}^{{w_1},{w_2}}}(t)} } $ for each step  $t = 1, \ldots ,{n_3}$. Here,
$t = 1, \ldots ,{n_3}$. Here,  ${{\boldsymbol{A}}^{{w_1},{w_2}}}(t) = \left( {a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t}} \right)$
${{\boldsymbol{A}}^{{w_1},{w_2}}}(t) = \left( {a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t}} \right)$  $(1 \le {w_1} \le {n_1},{\rm{~}}1 \le {w_2} \le {n_2})$ is the transition matrix after component
$(1 \le {w_1} \le {n_1},{\rm{~}}1 \le {w_2} \le {n_2})$ is the transition matrix after component  ${x_{{w_1},{w_2},t}}$ gets added to the system, whose elements are all zero, except that for all
${x_{{w_1},{w_2},t}}$ gets added to the system, whose elements are all zero, except that for all  ${\boldsymbol{i}} \in S$, we have the following:
${\boldsymbol{i}} \in S$, we have the following:
(1) If
${w_1} = {w_2} = 1$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
where
\begin{align*}
{{\boldsymbol{j}}_u} =& \{[{{\boldsymbol{i}}_u} \wedge (k_u^3 - 1)]\cdot{1_{(1^-,1^-)}} + [({i_{u,1,1}} + 1) \wedge k_u^3]{I_{\{u \le s\} }} \cdot {\boldsymbol{1}_{(1,1)}}\} (1-I_u)+ (k_u^3 + 1) I_u \cdot {\boldsymbol{1}_{(1,1)}} ,\cr
I_u=&{I_{\{{i_{u,1,1}} = k_u^3+1\} }}\vee{I_{\{{k_u^1=k_u^2=1},{\rm{~}} u\le s,{\rm{~}}{i_{u,1,1}} = k_u^3-1\} }}, {\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}}1\le u\le M,
\end{align*}
${{\boldsymbol{i}}_u} =({i_{u,{v_1},{v_2}}},{\rm{~}}1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2})$ and
${{\boldsymbol{j}}_u} =({j_{u,{v_1},{v_2}}},{\rm{~}}1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2})$ with
$1\le u\le M$,
$\boldsymbol{1}_{(a,b)}$ is a matrix with only one non-zero element
$1$ in the
$a$th row and
$b$th column,
$1_{(a^-,b^-)}$ is an operator to make the element in the
$a$th row and
$b$th column of a matrix to be 0, and
$\boldsymbol{A}\wedge b =(a_{i,j}\wedge b, {\rm{~}}1\le i,j \le n) $ corresponding to matrix
$\boldsymbol{A}$ and number
$b$;(2) If
$({w_1},{w_2}) \ne (1,1)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
\begin{align*}
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}}+1) \wedge k_u^3 ]I_{\{u\le s\}} \cdot {\boldsymbol{1}_{({w_1},{w_2})}}\}(1-I_u)+ (k_u^3 + 1) I_u\cdot {\boldsymbol{1}_{(w_1,w_2)}}, \cr
I_u=&({I_{\{{i_{u,1,1}} = k_u^3 + 1\} }} \vee {I_{\{u \le s,{\rm{~}}{w_1} \ge {k_u^1},{\rm{~}}{w_2} \ge {k_u^2},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^1 + 1}^{{w_1}} {\sum\nolimits_{{v_2} = {w_2} - k_u^2 + 1}^{{w_2}} {{i_{u,{v_1},{v_2}}}} = k_u^1k_u^2k_u^3} - 1\} }}),{\rm{~}}1\le u\le M.
\end{align*}Given the above analysis on
${\boldsymbol{A}}(t)$
$(t = 1, \ldots ,{n_3})$, the reliability function of a multi-state linear connected-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({n_1},{n_2},{n_3})$: G system at state
$l$ can then be given as
$R = \boldsymbol{\pi A}(1) \cdots {\boldsymbol{A}}({n_3}){\boldsymbol{u}}^T$, where
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{\left| S \right| - 1})$ and
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{\left| {{S_0}} \right| + \cdots + \left| {{S_{l - 1}}} \right|},\underbrace {1, \ldots ,1}_{\left| {{S_l}} \right| \cdots + \left| {{S_M}} \right|})$. See Example 3.1 for an illustrative example.



























Remark 2.1 Specifically, for a multi-state linear connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of- $({n_1},{n_2},$
$({n_1},{n_2},$  ${n_3})$: G system, the discussions will be the same except that (2) above should be replaced by
${n_3})$: G system, the discussions will be the same except that (2) above should be replaced by
(2) If  $({w_1},{w_2}) \ne (1,1)$, we have
$({w_1},{w_2}) \ne (1,1)$, we have  $a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$  $(s = 0, \ldots ,M)$, with
$(s = 0, \ldots ,M)$, with
 \begin{align*}
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}}+1) \wedge k_u^3 ]I_{\{u\le s\}} \cdot {\boldsymbol{1}_{({w_1},{w_2})}}\} {I_{\{{i_{u,1,1}} \le k_u^3\} }} (1 - I_u ) + (k_u^3 + 1)I_u \cdot {\boldsymbol{1}_{(w_1,w_2)}}, \cr
I_u=& \mathop {\max }\limits_{a \ne b \ne c \in \{1,2,3\} }\{{I_{\{u \le s,{\rm{~}}{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}} {\sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}}\wedge k_u^c)}= k_u^1k_u^2k_u^3 - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}} }\} \\
&\vee {I_{\{{i_{u,1,1}} = k_u^3 + 1\} }},{\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}}1 \le u \le M.
\end{align*}
\begin{align*}
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}}+1) \wedge k_u^3 ]I_{\{u\le s\}} \cdot {\boldsymbol{1}_{({w_1},{w_2})}}\} {I_{\{{i_{u,1,1}} \le k_u^3\} }} (1 - I_u ) + (k_u^3 + 1)I_u \cdot {\boldsymbol{1}_{(w_1,w_2)}}, \cr
I_u=& \mathop {\max }\limits_{a \ne b \ne c \in \{1,2,3\} }\{{I_{\{u \le s,{\rm{~}}{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}} {\sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}}\wedge k_u^c)}= k_u^1k_u^2k_u^3 - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}} }\} \\
&\vee {I_{\{{i_{u,1,1}} = k_u^3 + 1\} }},{\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}}1 \le u \le M.
\end{align*}See Example 3.2 for an illustrative example.
Remark 2.2 To optimize with respect to both memory usage and computational time, for a multi-state linear connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of- $({n_1},{n_2},{n_3})$: G system, we can alternatively introduce a Markov chain
$({n_1},{n_2},{n_3})$: G system, we can alternatively introduce a Markov chain  $\{\tilde{Y}(t),t = 1, \ldots ,n\} $ having its state space as
$\{\tilde{Y}(t),t = 1, \ldots ,n\} $ having its state space as
 \begin{align*}
\tilde{S} = &\{{\boldsymbol{i}} = ({i_{u,{v_1},{v_2}}},1 \le u \le M,{\rm{~}}{k_u^1} \le {v_1} \le {n_1},{\rm{~}}{k_u^2} \le {v_2} \le {n_2}):{\rm{0}} \le {i_{u,{v_1},{v_2}}} \le k_u^3 - 1, \cr
& ({i_{u,{v_1},{v_2} + 2}} \vee \cdots \vee {i_{u,{v_1},({v_2} + {k_2}) \wedge {n_2}}}){I_{\{{i_{u,{v_1},{v_2} + 1}} \lt {i_{u,{v_1},{v_2}}}\} }} \le {i_{u,{v_1},{v_2} + 1}} , \cr
&({i_{u,{v_1} + 2,{v_2}}} \vee \cdots \vee {i_{u,({v_1} + {k_1}) \wedge {n_1},{v_2}}}) {I_{\{{i_{u,{v_1} + 1,{v_2}}} \lt {i_{u,{v_1},{v_2}}}\} }} \le {i_{u,{v_1} + 1,{v_2}}}, {\rm{~for~all~ }}{v_1},{v_2},\cr
& {\rm{or~ }}{i_{u,k_u^1,k_u^2}} = k_u^3,{\rm{~}}{i_{u,{v_1},{v_2}}} = 0{\rm{~ otherwise, ~for ~all~ }}u\} .
\end{align*}
\begin{align*}
\tilde{S} = &\{{\boldsymbol{i}} = ({i_{u,{v_1},{v_2}}},1 \le u \le M,{\rm{~}}{k_u^1} \le {v_1} \le {n_1},{\rm{~}}{k_u^2} \le {v_2} \le {n_2}):{\rm{0}} \le {i_{u,{v_1},{v_2}}} \le k_u^3 - 1, \cr
& ({i_{u,{v_1},{v_2} + 2}} \vee \cdots \vee {i_{u,{v_1},({v_2} + {k_2}) \wedge {n_2}}}){I_{\{{i_{u,{v_1},{v_2} + 1}} \lt {i_{u,{v_1},{v_2}}}\} }} \le {i_{u,{v_1},{v_2} + 1}} , \cr
&({i_{u,{v_1} + 2,{v_2}}} \vee \cdots \vee {i_{u,({v_1} + {k_1}) \wedge {n_1},{v_2}}}) {I_{\{{i_{u,{v_1} + 1,{v_2}}} \lt {i_{u,{v_1},{v_2}}}\} }} \le {i_{u,{v_1} + 1,{v_2}}}, {\rm{~for~all~ }}{v_1},{v_2},\cr
& {\rm{or~ }}{i_{u,k_u^1,k_u^2}} = k_u^3,{\rm{~}}{i_{u,{v_1},{v_2}}} = 0{\rm{~ otherwise, ~for ~all~ }}u\} .
\end{align*} Note that state  ${\boldsymbol{i}} \in \tilde{S}$ represents the following for
${\boldsymbol{i}} \in \tilde{S}$ represents the following for  $1\le u\le M$: if
$1\le u\le M$: if  $i_{u,k_u^1,k_u^2}\le k_u^3-1$, then in the
$i_{u,k_u^1,k_u^2}\le k_u^3-1$, then in the  $({v_1} - k_u^1 + 1)$th–
$({v_1} - k_u^1 + 1)$th– $v_1$th rows and
$v_1$th rows and  $({v_2} - k_u^2 + 1)$th–
$({v_2} - k_u^2 + 1)$th– $v_2$th columns of the system
$v_2$th columns of the system  $({k_u^1} \le {v_1} \le {n_1},{\rm{~}}{k_u^2} \le {v_2} \le {n_2})$, there are
$({k_u^1} \le {v_1} \le {n_1},{\rm{~}}{k_u^2} \le {v_2} \le {n_2})$, there are  $k_u^1 \times k_u^2 \times {i_{u,{v_1},{v_2}}}$ consecutive components in state
$k_u^1 \times k_u^2 \times {i_{u,{v_1},{v_2}}}$ consecutive components in state  $u$ or above
$u$ or above  $(1 \le u \le M)$ including components
$(1 \le u \le M)$ including components  ${x_{{w_1},{w_2},t}}$
${x_{{w_1},{w_2},t}}$  $({v_1} - k_u^1 + 1 \le {w_1} \le {v_1},{\rm{~}}{v_2} - k_u^2 + 1 \le {w_2} \le {v_2})$ among the added components; and if
$({v_1} - k_u^1 + 1 \le {w_1} \le {v_1},{\rm{~}}{v_2} - k_u^2 + 1 \le {w_2} \le {v_2})$ among the added components; and if  $i_{u,k_u^1,k_u^2}=k_u^3$, then there are
$i_{u,k_u^1,k_u^2}=k_u^3$, then there are  $k_u^1\times k_u^2\times k_u^3$ consecutive failed components in state
$k_u^1\times k_u^2\times k_u^3$ consecutive failed components in state  $u$ or above among all the added components. Furthermore, state
$u$ or above among all the added components. Furthermore, state  ${\boldsymbol{i}} \in \tilde{S}$ can be relabeled as
${\boldsymbol{i}} \in \tilde{S}$ can be relabeled as
 \begin{align*}
\tilde{e}({\boldsymbol{i}}) =& 1 + \sum\limits_{u = 1}^M {\sum\limits_{{v_1} = k_u^1}^{{n_1}} {\sum\limits_{{v_2} = k_u^2}^{{n_2}} {\sum\limits_{{\boldsymbol{j}} \in \tilde{S}} {\left( {\prod\limits_{x = 1}^u {\prod\limits_{y = k_u^1}^{{n_1} + ({v_1} - {n_1}){I_{\{x = u\} }}} } }
{\prod\limits_{z = k_u^2}^{{n_2} + ({v_2} - {n_2} - 1){I_{\{x = u,{\rm{~}}y = {v_1}\} }}} {{I_{\{{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}} }\right)} } }}{I_{\{{i_{u,{v_1},{v_2}}} \gt {j_{u,{v_1},{v_2}}}\} }} ,
\end{align*}
\begin{align*}
\tilde{e}({\boldsymbol{i}}) =& 1 + \sum\limits_{u = 1}^M {\sum\limits_{{v_1} = k_u^1}^{{n_1}} {\sum\limits_{{v_2} = k_u^2}^{{n_2}} {\sum\limits_{{\boldsymbol{j}} \in \tilde{S}} {\left( {\prod\limits_{x = 1}^u {\prod\limits_{y = k_u^1}^{{n_1} + ({v_1} - {n_1}){I_{\{x = u\} }}} } }
{\prod\limits_{z = k_u^2}^{{n_2} + ({v_2} - {n_2} - 1){I_{\{x = u,{\rm{~}}y = {v_1}\} }}} {{I_{\{{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}} }\right)} } }}{I_{\{{i_{u,{v_1},{v_2}}} \gt {j_{u,{v_1},{v_2}}}\} }} ,
\end{align*}and state space  $\tilde{S}$ can then be divided into
$\tilde{S}$ can then be divided into  $M + 1$ subsets, with
$M + 1$ subsets, with  $\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup \cdots \cup {\tilde{S}_M}$, where
$\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup \cdots \cup {\tilde{S}_M}$, where  ${\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:i_{1,k_1^1,k_1^2}\le k_1^3 - 1} \right\}$ is a subset of
${\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:i_{1,k_1^1,k_1^2}\le k_1^3 - 1} \right\}$ is a subset of  $\tilde{S}$ that corresponds to the case when the system is in state
$\tilde{S}$ that corresponds to the case when the system is in state  $0$, and for
$0$, and for  $1 \le u \le M$,
$1 \le u \le M$,
 \begin{align*}
{\tilde{S}_u} = &\left\{{{\boldsymbol{i}} \in \tilde{S}:i_{1,k_1^1,k_1^2} = k_1^3 , \ldots ,i_{u,k_u^1,k_u^2} = k_u^3 ,{{\rm{~}}i_{u+1,k_{u+1}^1,k_{u+1}^2} \le k_{u + 1}^3 -1}} \right\}
\end{align*}
\begin{align*}
{\tilde{S}_u} = &\left\{{{\boldsymbol{i}} \in \tilde{S}:i_{1,k_1^1,k_1^2} = k_1^3 , \ldots ,i_{u,k_u^1,k_u^2} = k_u^3 ,{{\rm{~}}i_{u+1,k_{u+1}^1,k_{u+1}^2} \le k_{u + 1}^3 -1}} \right\}
\end{align*}is a subset of  $\tilde{S}$ that corresponds to the case when the system is in state
$\tilde{S}$ that corresponds to the case when the system is in state  $u$.
$u$.
With all these relabeled states, the Markov chain  $\{\tilde{Y}(t),t = 1, \ldots ,{n_3}\} $ has its transition matrices as
$\{\tilde{Y}(t),t = 1, \ldots ,{n_3}\} $ has its transition matrices as  ${\tilde{\boldsymbol{A}}}(t) = \left( {\tilde{a}_{\tilde{e}({\boldsymbol{i}}),\tilde{e}({\boldsymbol{j}})}^t} \right)$ for each step
${\tilde{\boldsymbol{A}}}(t) = \left( {\tilde{a}_{\tilde{e}({\boldsymbol{i}}),\tilde{e}({\boldsymbol{j}})}^t} \right)$ for each step  $t = 1, \ldots ,{n_3}$, after components in the
$t = 1, \ldots ,{n_3}$, after components in the  $t$th layer get added to the system. Elements in
$t$th layer get added to the system. Elements in  ${\tilde{\boldsymbol{A}}}(t)$ are all zero, except that for all
${\tilde{\boldsymbol{A}}}(t)$ are all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$, we have
${\boldsymbol{i}} \in \tilde{S}$, we have  $\tilde{a}_{\tilde{e}({\boldsymbol{i}}),\tilde{e}({\boldsymbol{j}})}^t = \tilde{a}_{\tilde{e}({\boldsymbol{i}}),\tilde{e}({\boldsymbol{j}})}^t + \prod\nolimits_{{w_1} = 1}^{{n_1}} {\prod\nolimits_{{w_2} = 1}^{{n_2}} {p_{{w_1},{w_2},t}^{{s_{{w_1},{w_2}}}}} } $
$\tilde{a}_{\tilde{e}({\boldsymbol{i}}),\tilde{e}({\boldsymbol{j}})}^t = \tilde{a}_{\tilde{e}({\boldsymbol{i}}),\tilde{e}({\boldsymbol{j}})}^t + \prod\nolimits_{{w_1} = 1}^{{n_1}} {\prod\nolimits_{{w_2} = 1}^{{n_2}} {p_{{w_1},{w_2},t}^{{s_{{w_1},{w_2}}}}} } $  $(0 \le {s_{{w_1},{w_2}}} \le M{\rm{,~ 1}} \le {w_1} \le {n_1},{\rm{~}}1 \le {w_2} \le {n_2})$, with
$(0 \le {s_{{w_1},{w_2}}} \le M{\rm{,~ 1}} \le {w_1} \le {n_1},{\rm{~}}1 \le {w_2} \le {n_2})$, with
 \begin{align*}
{j_{u,{v_1},{v_2}}} =& [({i_{u,{v_1},{v_2}}} + 1){I_{\{{i_{u,{v_1},{v_2}}} \le k_u^3 - 2,{\rm{~}}u\le {s_{{w_1},{w_2}}},{\rm{~}}{v_1} - k_u^1 + 1 \le {w_1}\le {v_1},{\rm{~}}{v_2} - k_u^2 + 1 \le {w_2} \le {v_2}\} }}({I_{\{({v_1},{v_2}) = (k_u^1,k_u^2)\} }} \vee \cr
&{I_{\{({v_1},{v_2}) \ne (k_u^1,k_u^2),{\rm{~}}{j_{u,k_u^1,k_u^2}} \lt k_u^3\} }})] \vee [k_u^3{I_{\{({v_1},{v_2}) = (k_u^1,k_u^2)\} }}({I_{\{{i_{u,{v_1},{v_2}}} = k_u^3\} }} \vee \mathop {{\rm{max}}}\limits_{k_u^1 \le {r_1} \le {n_1},{\rm{~}}k_u^2 \le {r_2} \le {n_2}} \cr
&{I_{\{{i_{u,{r_1},{r_2}}} = k_u^3 - 1,{\rm{~}}u\le {s_{{w_1},{w_2}}} ,}}{_{{\rm{~}}{r_1} - k_u^1 + 1 \le {w_1} \le {r_1},{\rm{~}}{r_2} - k_u^2 + 1 \le {w_2} \le {r_2}\} }})],\cr
& {\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}}1 \le u \le M,{\rm{~}}k_u^1 \le {v_1} \le {n_1},{\rm{~}}k_u^2 \le {v_2} \le {n_2}.
\end{align*}
\begin{align*}
{j_{u,{v_1},{v_2}}} =& [({i_{u,{v_1},{v_2}}} + 1){I_{\{{i_{u,{v_1},{v_2}}} \le k_u^3 - 2,{\rm{~}}u\le {s_{{w_1},{w_2}}},{\rm{~}}{v_1} - k_u^1 + 1 \le {w_1}\le {v_1},{\rm{~}}{v_2} - k_u^2 + 1 \le {w_2} \le {v_2}\} }}({I_{\{({v_1},{v_2}) = (k_u^1,k_u^2)\} }} \vee \cr
&{I_{\{({v_1},{v_2}) \ne (k_u^1,k_u^2),{\rm{~}}{j_{u,k_u^1,k_u^2}} \lt k_u^3\} }})] \vee [k_u^3{I_{\{({v_1},{v_2}) = (k_u^1,k_u^2)\} }}({I_{\{{i_{u,{v_1},{v_2}}} = k_u^3\} }} \vee \mathop {{\rm{max}}}\limits_{k_u^1 \le {r_1} \le {n_1},{\rm{~}}k_u^2 \le {r_2} \le {n_2}} \cr
&{I_{\{{i_{u,{r_1},{r_2}}} = k_u^3 - 1,{\rm{~}}u\le {s_{{w_1},{w_2}}} ,}}{_{{\rm{~}}{r_1} - k_u^1 + 1 \le {w_1} \le {r_1},{\rm{~}}{r_2} - k_u^2 + 1 \le {w_2} \le {r_2}\} }})],\cr
& {\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}}1 \le u \le M,{\rm{~}}k_u^1 \le {v_1} \le {n_1},{\rm{~}}k_u^2 \le {v_2} \le {n_2}.
\end{align*}The above method can also be applied to the systems in Definitions 1.2-1.4 and the corresponding discussions are omitted for the sake of conciseness. The method here is more efficient than the main FMCIA with smaller state spaces and simpler transition matrices. See Examples 3.7–3.12 for illustrative examples and see Table 3 for detailed comparisons.
Computational times for the main FMCIA and its alternative in Remark 2.2.

Table 3 Long description
The table reports computation time in seconds for two methods across six figure cases labeled 1(a) through 1(f). Main FMCIA takes about 2,038 seconds for 1(a) and 2,273 seconds for 1(b), then rises sharply to about 185,330 to 206,840 seconds for 1(c) through 1(f). The Remark 2.2 method is much faster in every case, ranging from 0.874 seconds to 36.565 seconds. For 1(a) and 1(b), Remark 2.2 takes 1.506 and 3.642 seconds, compared with roughly two thousand seconds for Main FMCIA. For 1(c) through 1(f), Remark 2.2 stays between about 0.874 and 36.565 seconds while Main FMCIA remains around 185,000 to 207,000 seconds. Overall, Remark 2.2 consistently outperforms Main FMCIA by several orders of magnitude, with its slowest cases occurring at 1(d) and 1(f).
2.2. Multi-state linear
$\boldsymbol{l}$-connected-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({n_1},{n_2},$
${n_3})$: G system without overlapping




Following the assumptions stated in Section 2.1, for the derivation of the reliability function of a multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of- $({n_1},{n_2},{n_3})$: G system without overlapping, we construct a Markov chain
$({n_1},{n_2},{n_3})$: G system without overlapping, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ by incrementally adding components column by column, whose state space is
$\{Y(t),t = 1, \ldots ,n\} $ by incrementally adding components column by column, whose state space is
 \begin{align*}
S = &\{({{\boldsymbol{i}}_0},{\boldsymbol{i}}){\rm{~with~}}{{\boldsymbol{i}}_0} = ({i_{u,0}},1 \le u \le M),{\rm{~}}{\boldsymbol{i}} = ({i_{u,{v_1},{v_2}}},1 \le u \le M,{\rm{~}}1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2}): \cr
& 0\le {i_{u,0}} \le {l_u} - 1,{\rm{~0}} \le {i_{u,{v_1},{v_2}}} \le k_u^3{\rm{~ for ~all~ }}{v_1},{v_2}, {\rm{~}}\sum\nolimits_{{s_1} = {v_1} - {k_u^1} + 1}^{{v_1}}{\sum\nolimits_{{s_2} = {v_2} - {k_u^2} + 1}^{{v_2}} {{i_{u,{s_1},{s_2}}}} } \le \cr
& k_u^1k_u^2k_u^3 -1{\rm{~for~ all~ }}{v_1} \ge k_u^1, {\rm{~}}{v_2} \ge k_u^2,{\rm{~or~ }}{i_{u,0}} = {l_u},{\rm{~}}{{\boldsymbol{i}}_u} = {{\boldsymbol{0}}_{{n_1} \times {n_2}}},{\rm{~ for~ all~ }}u\} .
\end{align*}
\begin{align*}
S = &\{({{\boldsymbol{i}}_0},{\boldsymbol{i}}){\rm{~with~}}{{\boldsymbol{i}}_0} = ({i_{u,0}},1 \le u \le M),{\rm{~}}{\boldsymbol{i}} = ({i_{u,{v_1},{v_2}}},1 \le u \le M,{\rm{~}}1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2}): \cr
& 0\le {i_{u,0}} \le {l_u} - 1,{\rm{~0}} \le {i_{u,{v_1},{v_2}}} \le k_u^3{\rm{~ for ~all~ }}{v_1},{v_2}, {\rm{~}}\sum\nolimits_{{s_1} = {v_1} - {k_u^1} + 1}^{{v_1}}{\sum\nolimits_{{s_2} = {v_2} - {k_u^2} + 1}^{{v_2}} {{i_{u,{s_1},{s_2}}}} } \le \cr
& k_u^1k_u^2k_u^3 -1{\rm{~for~ all~ }}{v_1} \ge k_u^1, {\rm{~}}{v_2} \ge k_u^2,{\rm{~or~ }}{i_{u,0}} = {l_u},{\rm{~}}{{\boldsymbol{i}}_u} = {{\boldsymbol{0}}_{{n_1} \times {n_2}}},{\rm{~ for~ all~ }}u\} .
\end{align*} Note that state  $({{\boldsymbol{i}}_0},{\boldsymbol{i}})\in S$ represents that there are
$({{\boldsymbol{i}}_0},{\boldsymbol{i}})\in S$ represents that there are  ${i_{u,0}}$
${i_{u,0}}$  $(1 \le u \le M)$ non-overlapping blocks of consecutive
$(1 \le u \le M)$ non-overlapping blocks of consecutive  $k_u^1 \times k_u^2 \times k_u^3$ components in state
$k_u^1 \times k_u^2 \times k_u^3$ components in state  $u$ or above, except that in the
$u$ or above, except that in the  $v_1$th row and
$v_1$th row and  $v_2$th column of the system
$v_2$th column of the system  $(1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2})$, there are
$(1 \le {v_1} \le {n_1},{\rm{~}}1 \le {v_2} \le {n_2})$, there are  ${i_{u,{v_1},{v_2}}}$ consecutive components in state
${i_{u,{v_1},{v_2}}}$ consecutive components in state  $u$ or above
$u$ or above  $(1 \le u \le M)$ including component
$(1 \le u \le M)$ including component  ${x_{{v_1},{v_2},t}}$ among the added components. Furthermore, state
${x_{{v_1},{v_2},t}}$ among the added components. Furthermore, state  $({{\boldsymbol{i}}_0},{\boldsymbol{i}}) \in S$ can now be relabeled as
$({{\boldsymbol{i}}_0},{\boldsymbol{i}}) \in S$ can now be relabeled as
 \begin{align*}
e({{\boldsymbol{i}}_0},{\boldsymbol{i}}) = &1
+ \sum\limits_{u = 1}^M {{\sum\limits_{{v_1} = 1}^{{n_1}} {\sum\limits_{{v_2} = 1}^{{n_2}} {\sum\limits_{{\boldsymbol{j}} \in S} {\left( {\prod\limits_{x = 1}^u } {\prod\limits_{y = 1}^{{n_1} + ({v_1} - {n_1}){I_{\{x = u\} }}} {\prod\limits_{z = 1}^{{n_2} + ({v_2} - {n_2} - 1){I_{\{x = u,{\rm{~}}y = {v_1}\} }}} } }{{I_{\{{i_{x,0}} = {j_{x,0}},{\rm{~}}{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}}\right)} } } } }\cr
&\cdot{I_{\{{i_{u,{v_1},{v_2}}} \gt {j_{u,{v_1},{v_2}}}\} }}+ \sum\limits_{u = 1}^M {{{{\sum\limits_{{\boldsymbol{j}} \in S} {\left( {\prod\limits_{x = 1}^{u-1} } {\prod\limits_{y = 1}^{{n_1}} {\prod\limits_{z = 1}^{{n_2}} } }{{I_{\{{i_{x,0}} = {j_{x,0}},{\rm{~}}{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}}\right)} } } } }\cdot{I_{\{{i_{u,0}} \gt {j_{u,0}}\} }},
\end{align*}
\begin{align*}
e({{\boldsymbol{i}}_0},{\boldsymbol{i}}) = &1
+ \sum\limits_{u = 1}^M {{\sum\limits_{{v_1} = 1}^{{n_1}} {\sum\limits_{{v_2} = 1}^{{n_2}} {\sum\limits_{{\boldsymbol{j}} \in S} {\left( {\prod\limits_{x = 1}^u } {\prod\limits_{y = 1}^{{n_1} + ({v_1} - {n_1}){I_{\{x = u\} }}} {\prod\limits_{z = 1}^{{n_2} + ({v_2} - {n_2} - 1){I_{\{x = u,{\rm{~}}y = {v_1}\} }}} } }{{I_{\{{i_{x,0}} = {j_{x,0}},{\rm{~}}{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}}\right)} } } } }\cr
&\cdot{I_{\{{i_{u,{v_1},{v_2}}} \gt {j_{u,{v_1},{v_2}}}\} }}+ \sum\limits_{u = 1}^M {{{{\sum\limits_{{\boldsymbol{j}} \in S} {\left( {\prod\limits_{x = 1}^{u-1} } {\prod\limits_{y = 1}^{{n_1}} {\prod\limits_{z = 1}^{{n_2}} } }{{I_{\{{i_{x,0}} = {j_{x,0}},{\rm{~}}{i_{x,y,z}} = {j_{x,y,z}}{\rm{\} }}}}}\right)} } } } }\cdot{I_{\{{i_{u,0}} \gt {j_{u,0}}\} }},
\end{align*}and state space  $S$ can then be divided into
$S$ can then be divided into  $M+1$ subsets, with
$M+1$ subsets, with  $S = {S_0} \cup {S_1} \cup \cdots \cup {S_M}$, where
$S = {S_0} \cup {S_1} \cup \cdots \cup {S_M}$, where  ${S_0} = \{({{\boldsymbol{i}}_0},{\boldsymbol{i}})\in S:{i_{1,0}} \le {l_1} - 1\} $ is a subset of
${S_0} = \{({{\boldsymbol{i}}_0},{\boldsymbol{i}})\in S:{i_{1,0}} \le {l_1} - 1\} $ is a subset of  $S$ that corresponds to the case when the system is in state
$S$ that corresponds to the case when the system is in state  $0$, and for
$0$, and for  $1 \le u \le M$,
$1 \le u \le M$,  ${S_u} = \{({{\boldsymbol{i}}_0},{\boldsymbol{i}})\in S:{i_{1,0}} = {l_1}, \ldots ,{i_{u,0}} = {l_u},{\rm{~}}{i_{u + 1,0}} \le {l_{u+1}} - 1\} $ is a subset of
${S_u} = \{({{\boldsymbol{i}}_0},{\boldsymbol{i}})\in S:{i_{1,0}} = {l_1}, \ldots ,{i_{u,0}} = {l_u},{\rm{~}}{i_{u + 1,0}} \le {l_{u+1}} - 1\} $ is a subset of  $S$ that corresponds to the case when the system is in state
$S$ that corresponds to the case when the system is in state  $u$.
$u$.
With all these relabeled states, the Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ has its transition matrices as
$\{Y(t),t = 1, \ldots ,n\} $ has its transition matrices as  ${\boldsymbol{A}}(t) = \prod\nolimits_{{w_2} = 1}^{{n_2}} {\prod\nolimits_{{w_1} = 1}^{{n_1}} {{{\boldsymbol{A}}^{{w_1},{w_2}}}(t)} } $ for each step
${\boldsymbol{A}}(t) = \prod\nolimits_{{w_2} = 1}^{{n_2}} {\prod\nolimits_{{w_1} = 1}^{{n_1}} {{{\boldsymbol{A}}^{{w_1},{w_2}}}(t)} } $ for each step  $t = 1, \ldots ,{n_3}$. Here,
$t = 1, \ldots ,{n_3}$. Here,  ${{\boldsymbol{A}}^{{w_1},{w_2}}}(t) = \left( {a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t}} \right)$
${{\boldsymbol{A}}^{{w_1},{w_2}}}(t) = \left( {a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t}} \right)$  $(1 \le {w_1} \le {n_1},{\rm{~}}1 \le {w_2} \le {n_2})$ is the transition matrix after component
$(1 \le {w_1} \le {n_1},{\rm{~}}1 \le {w_2} \le {n_2})$ is the transition matrix after component  $x_{{w_1},{w_2},t}$ gets added to the system, whose elements are all zero, except that for all
$x_{{w_1},{w_2},t}$ gets added to the system, whose elements are all zero, except that for all  $({{\boldsymbol{i}}_0},{\boldsymbol{i}}) \in S$, we have the following:
$({{\boldsymbol{i}}_0},{\boldsymbol{i}}) \in S$, we have the following:
(1) If
${w_1} = {w_2} = 1$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
\begin{align*}
j_{u,0}=& i_{u,0} +{I_{\{{k_u^1=k_u^2=1},{\rm{~}} {i_{u,0}} \le l_u-1,{\rm{~}} u\le s,{\rm{~}} {i_{u,1,1}} = k_u^3-1\} }} ,\cr
{{\boldsymbol{j}}_u} =& \{[{{\boldsymbol{i}}_u} \wedge (k_u^3 - 1)]\cdot{1_{(1^-,1^-)}} + [({i_{u,1,1}} + 1) \wedge k_u^3]{I_{\{u \le s,{\rm{~}}j_{u,0}=i_{u,0}\} }} \cdot {\boldsymbol{1}_{(1,1)}}\} {I_{\{{j_{u,0}} \le l_u-1\} }},{\rm{~}}1\le u\le M,
\end{align*}(2) If
$({w_1},{w_2}) \ne (1,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
\begin{align*}
{j_{u,0}} =& {i_{u,0}} + {I_{\{{i_{u,0}} \le {l_u} - 1,{\rm{~}}u \le s,{\rm{~}}{w_1} \ge {k_u^1},{\rm{~}}{w_2} \ge {k_u^2},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^1 + 1}^{{w_1}} \sum\nolimits_{{v_2} = {w_2} - k_u^2 + 1}^{{w_2}} {{i_{u,{v_1},{v_2}}}} = k_u^1k_u^2k_u^3 - 1\}}},\cr
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}} +1) \wedge k_u^3 ]I_{\{u\le s\}} \cdot {\boldsymbol{1}_{({w_1},{w_2})}}\}{I_{\{{j_{u,0}}={i_{u,0}} \le {l_u} - 1\} }} \cr
& + ({{\boldsymbol{i}}_u} - \sum\nolimits_{{s_1} = {w_1} - k_u^1 + 1}^{{w_1}} {\sum\nolimits_{{s_2} = {w_2} - k_u^2 + 1}^{{w_2}} {{i_{u,{s_1},{s_2}}} }}\cdot {\boldsymbol{1}_{({s_1},{s_2})} } ){I_{\{{j_{u,0}}= {i_{u,0}}+1\le l_u-1\}}}, {\rm{~}}1 \le u \le M.
\end{align*}Given the above analysis on
${\boldsymbol{A}}(t)$ (
$t=1,\ldots,n_3$), the reliability function of a multi-state linear
$\boldsymbol{l}$-connected-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({n_1},{n_2},{n_3})$: G system at state
$l$ can be given as
$R = \boldsymbol{\pi A}(1) \cdots {\boldsymbol{A}}({n_3}){\boldsymbol{u}}^T$, where
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{\left| S \right| - 1})$ and
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{\left| {{S_0}} \right| + \cdots + \left| {{S_{l - 1}}} \right|},\underbrace {1, \ldots ,1}_{\left| {{S_l}} \right| \cdots + \left| {{S_M}} \right|})$. See Example 3.3 for an illustrative example.

















Remark 2.3 Specifically, for a multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of- $({n_1},{n_2},{n_3})$: G system without overlapping, the discussions will be the same except that (2) above should be replaced by
$({n_1},{n_2},{n_3})$: G system without overlapping, the discussions will be the same except that (2) above should be replaced by
(2) If
$({w_1},{w_2}) \ne (1,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
\begin{align*}
{j_{u,0}} =& {i_{u,0}} + \mathop {{\rm{max}}}\limits_{a\ne b \ne c\in \{1,2,3\} } I_{\{{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}} \sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}} \wedge k_u^c) = k_u^1k_u^2k_u^3 - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}}\cr
&\cdot{I_{\{{i_{u,0}} \le {l_u} - 1,{\rm{~}}u \le s\} }},\cr
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u} \cdot {1_{({w^-_1},{w^-_2})}}+ [({i_{u,{w_1},{w_2}}}+1 )\wedge k_u^3]I_{\{u\le s\}} \cdot {\boldsymbol{1}_{({w_1},{w_2})}}\}I_{\{{j_{u,0}}= {i_{u,0}}\le {l_u} - 1\}} \cr
& + ({{\boldsymbol{i}}_u} -\sum\nolimits_{{s_1} = {w_1} - k_u^a + 1}^{{w_1}} {\sum\nolimits_{{s_2} = {w_2} - k_u^b + 1}^{{w_2}} {{i_{u,{s_1},{s_2}}} } } \cdot {\boldsymbol{1}_{({s_1},{s_2})}})\cr
&\cdot {I_{\{(a,b ){\rm{~is~the~ first~ pair~ in~}}(1,2),(1,3),(2,1),(2,3),(3,1),(3,2) {\rm{~such~that~}} {j_{u,0}}= {i_{u,0}}+1\le {l_u} - 1 \}}} ,{\rm{~~~~~~~~}}1 \le u \le M.
\end{align*}See Example 3.4 for an illustrative example.




2.3. Multi-state linear
$\boldsymbol{l}$-connected-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({n_1},{n_2},$
${n_3})$: G system with overlapping



Following the assumptions stated earlier in Section 2.1, for the derivation of the reliability function of a multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})$-out-of- $({n_1},{n_2},{n_3})$: G system with overlapping, the discussions will be the same as in Section 2.2 except that (1) and (2) there need to be replaced by
$({n_1},{n_2},{n_3})$: G system with overlapping, the discussions will be the same as in Section 2.2 except that (1) and (2) there need to be replaced by
(1) If
${w_1} = {w_2} = 1$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
\begin{align*}
j_{u,0}=& i_{u,0} +{I_{\{{k_u^1=k_u^2=1},{\rm{~}} {i_{u,0}} \le l_u-1,{\rm{~}} u\le s,{\rm{~}} {i_{u,1,1}} = k_u^3-1\} }} ,\cr
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u} \wedge (k_u^3 - 1)\cdot{1_{(1^-,1^-)}} + [({i_{u,1,1}} + {I_{\{u \le s,{\rm{~}}j_{u,0}=i_{u,0}\} }}) \wedge k_u^3] \cdot {\boldsymbol{1}_{(1,1)}}\} {I_{\{{j_{u,0}} \le l_u-1\} }},{\rm{~}}1\le u\le M;
\end{align*}(2) If
$({w_1},{w_2}) \ne (1,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$(s = 0, \ldots ,M)$, with
\begin{align*}
{j_{u,0}} = &{i_{u,0}} + {I_{\{{i_{u,0}} \le {l_u} - 1,{\rm{~}}u \le s,{\rm{~}}{w_1} \ge {k_u^1},{\rm{~}}{w_2} \ge {k_u^2},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^1 + 1}^{{w_1}} {\sum\nolimits_{{v_2} = {w_2} - k_u^2 + 1}^{{w_2}} {{i_{u,{v_1},{v_2}}}} = k_u^1k_u^2k_u^3} - 1\} }}, \cr
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}}+1) \wedge k_u^3]I_{\{u\le s\}} \cdot {\boldsymbol{1}_{({w_1},{w_2})}}- {\boldsymbol{1}_{({w_1} - k_u^1 + 1,{w_2} - k_u^2 + 1)}}\cr
& \cdot {I_{\{{j_{u,0}} \le {i_{u,0}}+1\} }}\}{I_{\{{j_{u,0}} \le {l_u} - 1\} }}, {\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}}1 \le u \le M.
\end{align*}See Example 3.5 for an illustrative example.








Remark 2.4 Specifically, for a multi-state linear  $\boldsymbol{l}$-connected-
$\boldsymbol{l}$-connected- $({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of-
$({{\boldsymbol{k}}_1},{{\boldsymbol{k}}_2},{{\boldsymbol{k}}_3})!$-out-of- $({n_1},{n_2},{n_3})$: G system with overlapping, the discussions will be the same except that (2) should be replaced by
$({n_1},{n_2},{n_3})$: G system with overlapping, the discussions will be the same except that (2) should be replaced by
(2) If  $({w_1},{w_2}) \ne (1,1)$, we have
$({w_1},{w_2}) \ne (1,1)$, we have  $a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2},t} + p_{{w_1},{w_2},t}^s$  $(s = 0, \ldots ,M)$, with
$(s = 0, \ldots ,M)$, with
 \begin{align*}
{j_{u,0}} = &{i_{u,0}} + \mathop \sum\limits_{a\ne b \ne c \in \{1,2,3\} } {I_{\{{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}} \sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}} \wedge k_u^c)= k_u^1k_u^2k_u^3 - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}}}\cr
&\cdot{I_{\{{i_{u,0}} \le {l_u} - 1,{\rm{~}}u \le s\} }}, \cr
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}}+1) \wedge k_u^3] I_{\{u\le s\}}\cdot {\boldsymbol{1}_{({w_1},{w_2})}} - {\boldsymbol{1}_{({w_a} - k_u^a + 1,{w_b} - k_u^b + 1)}}({I_{\{(a,b) = (1,2)\} }} + \cr
& I_{{\{(a,b) = (2,1)\} }}) I_{{\{{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}} {\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}}\sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}} \wedge k_u^c) = k_u^1k_u^2k_u^3} - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}} \} ,\cr
&\cdot {I_{\{{j_{u,0}} \le {l_u} - 1\} }}, {\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ }}1 \le u \le M.
\end{align*}
\begin{align*}
{j_{u,0}} = &{i_{u,0}} + \mathop \sum\limits_{a\ne b \ne c \in \{1,2,3\} } {I_{\{{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}} \sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}} \wedge k_u^c)= k_u^1k_u^2k_u^3 - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}}}\cr
&\cdot{I_{\{{i_{u,0}} \le {l_u} - 1,{\rm{~}}u \le s\} }}, \cr
{{\boldsymbol{j}}_u} =& \{{{\boldsymbol{i}}_u}\cdot {1_{({w^-_1},{w^-_2})}} + [({i_{u,{w_1},{w_2}}}+1) \wedge k_u^3] I_{\{u\le s\}}\cdot {\boldsymbol{1}_{({w_1},{w_2})}} - {\boldsymbol{1}_{({w_a} - k_u^a + 1,{w_b} - k_u^b + 1)}}({I_{\{(a,b) = (1,2)\} }} + \cr
& I_{{\{(a,b) = (2,1)\} }}) I_{{\{{w_1} \ge {k_u^a},{\rm{~}}{w_2} \ge {k_u^b},{\rm{~}}} {\sum\nolimits_{{v_1} = {w_1} - k_u^a + 1}^{{w_1}}\sum\nolimits_{{v_2} = {w_2} - k_u^b + 1}^{{w_2}} ({{i_{u,{v_1},{v_2}}}} \wedge k_u^c) = k_u^1k_u^2k_u^3} - 1,{\rm{~}}{{i_{u,{w_1},{w_2}}}}=k_u^c-1\}} \} ,\cr
&\cdot {I_{\{{j_{u,0}} \le {l_u} - 1\} }}, {\rm{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ }}1 \le u \le M.
\end{align*}See Example 3.6 for an illustrative example.
3. Some illustrative examples
This section presents twelve examples of multi-state linear three-dimensional consecutive  $k$-type systems and the associated calculations to provide an illustration for all the results established in the last section.
$k$-type systems and the associated calculations to provide an illustration for all the results established in the last section.
Example 3.1 Consider a ternary-state linear connected- $(2,1;2,2;2,2)$-out-of-
$(2,1;2,2;2,2)$-out-of- $(2,2,n)$: G system with state space
$(2,2,n)$: G system with state space  $\{0,1,2\}$, which is in state
$\{0,1,2\}$, which is in state  $1$ or above if there exist
$1$ or above if there exist  $2 \times 2 \times 2$ consecutive components in state
$2 \times 2 \times 2$ consecutive components in state  $1$ or above, and is in state
$1$ or above, and is in state  $2$ if there also exist
$2$ if there also exist  $1 \times 2 \times 2$ consecutive components in state
$1 \times 2 \times 2$ consecutive components in state  $2$. All the components are assumed to be i.i.d. with the same probabilities
$2$. All the components are assumed to be i.i.d. with the same probabilities  $p^i$ in state
$p^i$ in state  $i$
$i$  $(i=1,2,3)$. Then, according to Section 2.1, we construct a Markov chain
$(i=1,2,3)$. Then, according to Section 2.1, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ with state space
$\{Y(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
S =& \left\{{{\boldsymbol{i}} = \left( {\begin{array}{c|c}
{\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix} } & {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix} } \end{array}} \right):} \right.{\rm{0}} \le {i_{1,1,1}},{i_{1,1,2}},{i_{1,2,1}} \le 2,{\rm{~}}0 \le {i_{1,2,2}} \le 2 - {I_{\{{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2\} }} \cr &{\rm{~or~}}{i_{1,1,1}}= 3,{\rm{~}}{i_{1,1,2}} = {i_{1,2,1}} = {i_{1,2,2}} = 0;{\rm{~}}0 \le {i_{2,1,1}} \le 2,{\rm{~}} 0 \le {i_{2,1,2}}\le 2 - {I_{\{{i_{2,1,1}} = 2\} }},{\rm{~}} {\rm{ }}0 \le {i_{2,2,1}} \le 2, \cr
&\left. {0 \le {i_{2,2,2}} \le 2 -{I_{\{{i_{2,2,1}} = 2\} }}{\rm{~or~ }}{i_{2,1,1}} = 3,{\rm{~}}{i_{2,1,2}} = {i_{2,2,1}} = {i_{2,2,2}} = 0} \right\}.
\end{align*}
\begin{align*}
S =& \left\{{{\boldsymbol{i}} = \left( {\begin{array}{c|c}
{\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix} } & {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix} } \end{array}} \right):} \right.{\rm{0}} \le {i_{1,1,1}},{i_{1,1,2}},{i_{1,2,1}} \le 2,{\rm{~}}0 \le {i_{1,2,2}} \le 2 - {I_{\{{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2\} }} \cr &{\rm{~or~}}{i_{1,1,1}}= 3,{\rm{~}}{i_{1,1,2}} = {i_{1,2,1}} = {i_{1,2,2}} = 0;{\rm{~}}0 \le {i_{2,1,1}} \le 2,{\rm{~}} 0 \le {i_{2,1,2}}\le 2 - {I_{\{{i_{2,1,1}} = 2\} }},{\rm{~}} {\rm{ }}0 \le {i_{2,2,1}} \le 2, \cr
&\left. {0 \le {i_{2,2,2}} \le 2 -{I_{\{{i_{2,2,1}} = 2\} }}{\rm{~or~ }}{i_{2,1,1}} = 3,{\rm{~}}{i_{2,1,2}} = {i_{2,2,1}} = {i_{2,2,2}} = 0} \right\}.
\end{align*} Note that  $S = {S_0} \cup {S_1} \cup {S_2}$, where
$S = {S_0} \cup {S_1} \cup {S_2}$, where
 \begin{align*}
&{S_0} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} \le 2} \right\},{\rm{~~}}
{S_1} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} = 3,{\rm{~}}{i_{2,1,1}} \le 2} \right\}, {\rm{~~}}
{S_2} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} = 3,{\rm{~}}{i_{2,1,1}} = 3} \right\}.
\end{align*}
\begin{align*}
&{S_0} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} \le 2} \right\},{\rm{~~}}
{S_1} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} = 3,{\rm{~}}{i_{2,1,1}} \le 2} \right\}, {\rm{~~}}
{S_2} = \left\{{{\boldsymbol{i}} \in S:{i_{1,1,1}} = 3,{\rm{~}}{i_{2,1,1}} = 3} \right\}.
\end{align*} Then, the transition matrix can be expressed as  ${\boldsymbol{A}} = {{\boldsymbol{A}}^{1,1}}{{\boldsymbol{A}}^{2,1}}{{\boldsymbol{A}}^{1,2}}{{\boldsymbol{A}}^{2,2}}$, where the elements of
${\boldsymbol{A}} = {{\boldsymbol{A}}^{1,1}}{{\boldsymbol{A}}^{2,1}}{{\boldsymbol{A}}^{1,2}}{{\boldsymbol{A}}^{2,2}}$, where the elements of  ${{\boldsymbol{A}}^{{w_1},{w_2}}} = \left( {a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2}}} \right)$
${{\boldsymbol{A}}^{{w_1},{w_2}}} = \left( {a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2}}} \right)$  $({w_1},{w_2} = 1,2)$ are all zero, except that for all
$({w_1},{w_2} = 1,2)$ are all zero, except that for all  ${\boldsymbol{i}} \in S$, we have the following:
${\boldsymbol{i}} \in S$, we have the following:
(1) If
$({w_1}, {w_2})= (1,1)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + {p^s}$
$(s = 0,1,2)$, with
\begin{align*}
{{\boldsymbol{j}}_u} =& \left( {\begin{matrix}
{[({i_{u,1,1}} + 1) \wedge 2]{I_{\{u \le s\} }}} & {{i_{u,1,2}} \wedge 1} \cr
{{i_{u,2,1}} \wedge 1} & {{i_{u,2,2}} \wedge 1} \end{matrix}} \right){I_{\{{i_{u,1,1}} \le 2\} }} + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix} } \right){I_{\{{i_{u,1,1}} = 3\} }},{\rm{~}}u = 1,2;
\end{align*}(2) If
$({w_1},{w_2}) = (2,1)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + {p^s}$
$(s = 0,1,2)$, with
\begin{align*}
{{\boldsymbol{j}}_u} =& \left( {\begin{matrix}
{{i_{u,1,1}}} & {{i_{u,1,2}}} \cr
{[({i_{u,2,1}} + 1) \wedge 2]{I_{\{u \le s\} }}} & {{i_{u,2,2}}} \end{matrix} } \right){I_{\{{i_{u,1,1}} \le 2\} }} + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right){I_{\{{i_{u,1,1}} = 3\} }},{\rm{~ }}u = 1,2;
\end{align*}(3) If
$({w_1},{w_2}) = (1,2)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + {p^s}$
$(s = 0,1,2)$, with
\begin{align*}
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {[({i_{1,1,2}} + 1) \wedge 2)]{I_{\{s \ge 1\} }}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix}} \right){I_{\{{i_{1,1,1}} \le 2\} }} + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right){I_{\{{i_{1,1,1}} = 3\} }}, \cr
{{\boldsymbol{j}}_2} = &\left( {\begin{matrix}
{{i_{2,1,1}}} & {[({i_{2,1,2}} + 1) \wedge 2)]{I_{\{s = 2\} }}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right)(1 - {I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,1,2}} = 1\} }})\cr
&+\left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right)( {I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,1,2}} = 1\} }});
\end{align*}(4) If
$({w_1},{w_2}) = (2,2)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + {p^s}$
$(s = 0,1,2)$, with
\begin{align*}
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {[({i_{1,2,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \end{matrix}} \right)(1 - {I_{\{{i_{1,1,1}} = 3\} }} \vee {I_{\{s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }}) \cr
& + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix} } \right) ({I_{\{{i_{1,1,1}} = 3\} }} \vee {I_{\{s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }}), \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {[({i_{2,2,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \end{matrix}} \right)(1 - {I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}) \cr
& + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix} } \right)({I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}).
\end{align*}















With the above analysis, the reliability function of a multi-state linear connected- $(2,1;2,2;2,2)$-out-of-
$(2,1;2,2;2,2)$-out-of- $(2,2,n)$: G system at state
$(2,2,n)$: G system at state  $2$ can be given as
$2$ can be given as  $R = {\boldsymbol{\pi}}{{\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where
$R = {\boldsymbol{\pi}}{{\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where  ${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{5264})$ and
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{5264})$ and  ${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{5264},1)$. A plot of the reliability of the system
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{5264},1)$. A plot of the reliability of the system  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (a) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (a) of Fig. 1.
Reliability functions of the systems discussed in Examples 3.1–3.6.

Figure 1 Long description
The multi-line graphs illustrate reliability against p for three series: n equals 4, n equals 8 and n equals 12. The x-axis is labeled p, ranging from 0 to 0.5 and the y-axis is labeled Reliability, ranging from 0 to 1. Each graph shows three lines: a solid line for n equals 4, a dotted line for n equals 8 and a dashed line for n equals 12. Across all examples, reliability decreases as p increases. In each graph, the n equals 12 line remains higher, indicating greater reliability at higher p values compared to n equals 8 and n equals 4. Example 3.1 shows reliability dropping to approximately 0.5 at p equals 0.2 for n equals 4, p equals 0.3 for n equals 8 and p equals 0.4 for n equals 12. Example 3.2 through Example 3.6 follow similar trends, with slight variations in the exact points where reliability decreases significantly. The graphs demonstrate how increasing n shifts the reliability curve to the right, indicating improved reliability with higher n values.
For better understanding of the transition process in Example 3.1, states of the finite Markov chain after each added component (in order  $x_{1,1,1},x_{2,1,1},\ldots,x_{2,2,3}$ under specific component states) are provided in Table 3.
$x_{1,1,1},x_{2,1,1},\ldots,x_{2,2,3}$ under specific component states) are provided in Table 3.
Example 3.2 Consider a ternary-state linear connected- $(2,1;2,2;2,2)!$-out-of-
$(2,1;2,2;2,2)!$-out-of- $(2,2,n)$: G system with state space
$(2,2,n)$: G system with state space  $\{0,1,2\}$, which is in state
$\{0,1,2\}$, which is in state  $1$ or above if there exist
$1$ or above if there exist  $2\times 2 \times 2$ consecutive components in state
$2\times 2 \times 2$ consecutive components in state  $1$ or above, and is in state
$1$ or above, and is in state  $2$ if there also exist
$2$ if there also exist  $1 \times 2 \times 2$ or
$1 \times 2 \times 2$ or  $2 \times 1 \times 2$ or
$2 \times 1 \times 2$ or  $2 \times 2 \times 1$ consecutive components in state
$2 \times 2 \times 1$ consecutive components in state  $2$. All the components are assumed to be i.i.d. with the same probabilities
$2$. All the components are assumed to be i.i.d. with the same probabilities  $p^i$ in state
$p^i$ in state  $i$
$i$  $(i=1,2,3)$. Then, according to Remark 2.1, we follow the same analysis as in Example 3.1 except that (2) and (4) there need to be replaced by the following:
$(i=1,2,3)$. Then, according to Remark 2.1, we follow the same analysis as in Example 3.1 except that (2) and (4) there need to be replaced by the following:
(2) If
$({w_1},{w_2}) = (2,1)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + {p^s}$
$(s = 0,1,2)$, with
\begin{align*}
{{\boldsymbol{j}}_1} = &\left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{[({i_{1,2,1}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} & {{i_{1,2,2}}} \end{matrix}} \right){I_{\{{i_{1,1,1}} \le 2\} }} + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right){I_{\{{i_{1,1,1}} = 3\} }}, \cr
{{\boldsymbol{j}}_2} = &\left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{[({i_{2,2,1}} + 1) \wedge 2]{I_{\{s = 2\} }}} & {{i_{2,2,2}}} \end{matrix}} \right)(1 - {I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,2,1}} = 1\} }}) \cr
& + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right)({I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,2,1}} = 1\} }});
\end{align*}(4) If
$({w_1},{w_2}) = (2,2)$, we have
$a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} = a_{e({\boldsymbol{i}}),e({\boldsymbol{j}})}^{{w_1},{w_2},t} + {p^s}$
$(s = 0,1,2)$, with
\begin{align*}
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {[({i_{1,2,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \end{matrix}} \right)(1 - {I_{\{{i_{1,1,1}} = 3\} }} \vee{I_{\{s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }}) \cr
& + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right) ({I_{\{{i_{1,1,1}} = 3\} }} \vee {I_{\{s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }}), \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {[({i_{2,2,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \end{matrix}} \right)(1 - {I_{\{{i_{2,1,1}} = 3\} }} \vee{I_{\{s = 2,{\rm{~}}\max ({i_{2,1,2}},{i_{2,2,1}}) = 2,{\rm{~}}{i_{2,2,2}} = 1\} }} \cr
&\vee {I_{\{s = 2,{\rm{~}}{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1\} }}) + \left( {\begin{matrix}
3 & 0 \cr
0 & 0 \end{matrix}} \right)({I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{s = 2,{\rm{~}}\max ({i_{2,1,2}},{i_{2,2,1}}) = 2,{\rm{~}}{i_{2,2,2}} = 1\} }} \cr
&\vee {I_{\{s = 2,{\rm{~}}{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1\} }}).
\end{align*}A plot of the reliability of the system with
$p^1=p$,
$p^2=p$,
$p^3=1-2p$ (for
$0 \le p \le 0.5$) is presented in Panel (b) of Fig. 1.












Example 3.3 Consider a ternary-state linear  $(2,2)$-connected-
$(2,2)$-connected- $(2,1;2,2;2,2)$-out-of-
$(2,1;2,2;2,2)$-out-of- $(2,2,n)$: G system without overlapping with state space
$(2,2,n)$: G system without overlapping with state space  $\{0,1,2\} $, which is in state
$\{0,1,2\} $, which is in state  $1$ or above if there exist
$1$ or above if there exist  $2$ non-overlapping blocks of
$2$ non-overlapping blocks of  $2 \times 2 \times 2$ consecutive components in state
$2 \times 2 \times 2$ consecutive components in state  $1$ or above, and is in state
$1$ or above, and is in state  $2$ if there also exist
$2$ if there also exist  $2$ non-overlapping blocks of
$2$ non-overlapping blocks of  $1 \times 2 \times 2$ consecutive components in state
$1 \times 2 \times 2$ consecutive components in state  $2$. All the components are assumed to be i.i.d. with the same probabilities
$2$. All the components are assumed to be i.i.d. with the same probabilities  $p^i$ in state
$p^i$ in state  $i$
$i$  $(i=1,2,3)$. Then, according to Section 2.2, we construct a Markov chain
$(i=1,2,3)$. Then, according to Section 2.2, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ with state space
$\{Y(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
S =& \left\{{({{\boldsymbol{i}}_0},{\boldsymbol{i}}){\rm{~with~ }}{{\boldsymbol{i}}_0} = ({i_{1,0}},{i_{2,0}}){\rm{,~}}{\boldsymbol{i}} = \left( {\begin{array}{c|c}
{\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix} } & \end{array} } \right.} {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix} } \right):{\rm{~}}0 \le {i_{1,0}} \le 1, {\rm{~0}} \le {i_{1,1,1}},\cr
&{i_{1,1,2}},{i_{1,2,1}} \le 2,{\rm{~}} 0 \le {i_{1,2,2}} \le 2 - {I_{\{{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2\} }}{\rm{~or~}} {i_{1,0}}= 2,{\rm{~}} {i_{1,1,1}}= {i_{1,1,2}} = {i_{1,2,1}} = \cr
&{i_{1,2,2}} = 0;{\rm{~}}0 \le {i_{2,0}} \le 1,{\rm{~}}0 \le {i_{2,1,1}} \le 2,{\rm{~}}0 \le {i_{2,1,2}} \le 2 - {I_{\{{i_{2,1,1}} = 2\} }},{\rm{~}} 0 \le {i_{2,2,1}} \le 2,{\rm{~}}0 \le {i_{2,2,2}}\cr
&\left.{\le 2 - {I_{\{{i_{2,2,1}} = 2\} }}{\rm{~or~ }}{i_{2,0}} = 2,{\rm{~}}{i_{2,1,1}} = {i_{2,1,2}} = {i_{2,2,1}} = {i_{2,2,2}} = 0} \right\}.
\end{align*}
\begin{align*}
S =& \left\{{({{\boldsymbol{i}}_0},{\boldsymbol{i}}){\rm{~with~ }}{{\boldsymbol{i}}_0} = ({i_{1,0}},{i_{2,0}}){\rm{,~}}{\boldsymbol{i}} = \left( {\begin{array}{c|c}
{\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix} } & \end{array} } \right.} {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix} } \right):{\rm{~}}0 \le {i_{1,0}} \le 1, {\rm{~0}} \le {i_{1,1,1}},\cr
&{i_{1,1,2}},{i_{1,2,1}} \le 2,{\rm{~}} 0 \le {i_{1,2,2}} \le 2 - {I_{\{{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2\} }}{\rm{~or~}} {i_{1,0}}= 2,{\rm{~}} {i_{1,1,1}}= {i_{1,1,2}} = {i_{1,2,1}} = \cr
&{i_{1,2,2}} = 0;{\rm{~}}0 \le {i_{2,0}} \le 1,{\rm{~}}0 \le {i_{2,1,1}} \le 2,{\rm{~}}0 \le {i_{2,1,2}} \le 2 - {I_{\{{i_{2,1,1}} = 2\} }},{\rm{~}} 0 \le {i_{2,2,1}} \le 2,{\rm{~}}0 \le {i_{2,2,2}}\cr
&\left.{\le 2 - {I_{\{{i_{2,2,1}} = 2\} }}{\rm{~or~ }}{i_{2,0}} = 2,{\rm{~}}{i_{2,1,1}} = {i_{2,1,2}} = {i_{2,2,1}} = {i_{2,2,2}} = 0} \right\}.
\end{align*} Note that  $S = {S_0} \cup {S_1} \cup {S_2}$, where
$S = {S_0} \cup {S_1} \cup {S_2}$, where
 \begin{align*}
&{S_0} = \left\{{{\boldsymbol{i}} \in S:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{S_1} = \left\{{{\boldsymbol{i}} \in S:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}}
{S_2} = \left\{{{\boldsymbol{i}} \in S:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*}
\begin{align*}
&{S_0} = \left\{{{\boldsymbol{i}} \in S:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{S_1} = \left\{{{\boldsymbol{i}} \in S:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}}
{S_2} = \left\{{{\boldsymbol{i}} \in S:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*} Then, the transition matrix can be expressed as  ${\boldsymbol{A}} = {{\boldsymbol{A}}^{1,1}}{{\boldsymbol{A}}^{2,1}}{{\boldsymbol{A}}^{1,2}}{{\boldsymbol{A}}^{2,2}}$, where the elements of
${\boldsymbol{A}} = {{\boldsymbol{A}}^{1,1}}{{\boldsymbol{A}}^{2,1}}{{\boldsymbol{A}}^{1,2}}{{\boldsymbol{A}}^{2,2}}$, where the elements of  ${{\boldsymbol{A}}^{{w_1},{w_2}}} = \left( {a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}}} \right)$
${{\boldsymbol{A}}^{{w_1},{w_2}}} = \left( {a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}}} \right)$  $({w_1},{w_2} = 1,2)$ are all zero, except that for all
$({w_1},{w_2} = 1,2)$ are all zero, except that for all  $({{\boldsymbol{i}}_0},{\boldsymbol{i}}) \in S$, we have the following:
$({{\boldsymbol{i}}_0},{\boldsymbol{i}}) \in S$, we have the following:
(1) If
$({w_1}, {w_2}) = (1,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
${{\boldsymbol{j}}_0} = {{\boldsymbol{i}}_0}$ and
\begin{align*}
{{\boldsymbol{j}}_u} = \left( {\begin{matrix}
{[({i_{u,1,1}} + 1) \wedge 2]{I_{\{u \le s\} }}} & {{i_{u,1,2}} \wedge 1} \cr
{{i_{u,2,1}} \wedge 1} & {{i_{u,2,2}} \wedge 1} \end{matrix}} \right)&{I_{\{{j_{u,0}} \le 1\} }},{\rm{~}}u = 1,2;
\end{align*}(2) If
$({w_1},{w_2}) = (2,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
${{\boldsymbol{j}}_0} = {{\boldsymbol{i}}_0}$ and
\begin{equation*}{{\boldsymbol{j}}_u} = \left( {\begin{matrix}
{{i_{u,1,1}}} & {{i_{u,1,2}}} \cr
{[({i_{u,2,1}} + 1) \wedge 2]{I_{\{u \le s\} }}} & {{i_{u,2,2}}} \end{matrix}} \right){I_{\{{j_{u,0}} \le 1\} }},{\rm{~}}u = 1,2;\end{equation*}(3) If
$({w_1},{w_2}) = (1,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}},{\rm{~}}{j_{2,0}} = {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,1,2}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} = &\left( {\begin{matrix}
{{i_{1,1,1}}} & {[({i_{1,1,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix}} \right){I_{\{{j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {[({i_{2,1,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
0 & 0 \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}} = 0,{\rm{~}}{j_{2,0}} = 1\} }};
\end{align*}(4) If
$({w_1},{w_2}) = (2,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} = & {i_{1,0}} + {I_{\{{i_{1,0}} \le 1,{\rm{~}}s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }},\cr
{j_{2,0}} = & {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {[({i_{1,2,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \end{matrix}} \right){I_{\{{i_{1,0}}={j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} = &\left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {[({i_{2,2,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
0 & 0 \end{matrix}} \right){I_{\{{i_{2,0}} \le 0,{\rm{~}}{j_{2,0}} = 1\} }}.
\end{align*}

















With the above analysis, the reliability function of a multi-state linear  $(2,2)$-connected-
$(2,2)$-connected- $(2,1;2,$
$(2,1;2,$  $2;2,2)$-out-of-
$2;2,2)$-out-of- $(2,2,n$): G system without overlapping at state
$(2,2,n$): G system without overlapping at state  $2$ can be given as
$2$ can be given as  $R = {\boldsymbol{\pi}}{{\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where
$R = {\boldsymbol{\pi}}{{\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where  ${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{20768}),{\rm{~}}{\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{20768},1)$. A plot of the reliability of the system with
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{20768}),{\rm{~}}{\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{20768},1)$. A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (c) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (c) of Fig. 1.
Example 3.4 Consider a ternary-state linear  $(2,2)$-connected-
$(2,2)$-connected- $(2,1;2,2;2,2)!$-out-of-
$(2,1;2,2;2,2)!$-out-of- $(2,2,n)$: G system without overlapping with state space
$(2,2,n)$: G system without overlapping with state space  $\{0,1,2\}$, which is in state
$\{0,1,2\}$, which is in state  $1$ or above if there exist
$1$ or above if there exist  $2$ non-overlapping blocks of
$2$ non-overlapping blocks of  $2 \times 2 \times 2$ consecutive components in state
$2 \times 2 \times 2$ consecutive components in state  $1$ or above, and is in state
$1$ or above, and is in state  $2$ if there also exist
$2$ if there also exist  $2$ non-overlapping blocks of
$2$ non-overlapping blocks of  $1 \times 2 \times 2$ or
$1 \times 2 \times 2$ or  $2 \times 1 \times 2$ or
$2 \times 1 \times 2$ or  $2 \times 2 \times 1$ consecutive components in state
$2 \times 2 \times 1$ consecutive components in state  $2$. All the components are assumed to be i.i.d. with the same probabilities
$2$. All the components are assumed to be i.i.d. with the same probabilities  $p^i$ in state
$p^i$ in state  $i$
$i$  $(i=1,2,3)$. Then, according to Remark 2.3, we follow the same analysis as in Example 3.3 except that (2) and (4) there need to be replaced by
$(i=1,2,3)$. Then, according to Remark 2.3, we follow the same analysis as in Example 3.3 except that (2) and (4) there need to be replaced by
(2) If
$({w_1},{w_2}) = (2,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}},{\rm{~}}{j_{2,0}} = {i_{2,0}} + {I_{\{{i_{2,0}}\le 1,{\rm{~}} s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,2,1}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{[({i_{1,2,1}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} & {{i_{1,2,2}}} \end{matrix} } \right){I_{\{{j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{[({i_{2,2,1}} + 1) \wedge 2]{I_{\{s = 2\} }}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
0 & {{i_{2,1,2}}} \cr
0 & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}} = 0,{\rm{~}}{j_{2,0}} = 1\} }};
\end{align*}(3) If
$({w_1},{w_2}) = (2,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}} + {I_{\{{i_{1,0}} \le 1,{\rm{~}}s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }}, \cr
{\rm{~}}{j_{2,0}} =& {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2\} }}({I_{\{\max ({i_{2,1,2}},{i_{2,2,1}}) = 2,{\rm{~}}{i_{2,2,2}} = 1\} }} \vee {I_{\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1\} }}),\cr
{{\boldsymbol{j}}_1} = &\left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {[({i_{1,2,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \end{matrix}} \right){I_{\{{i_{1,0}}={j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {[({i_{2,2,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \end{matrix}} \right){I_{\{{i_{2,0}}= {j_{2,0}}\le 1\} }} + \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
0 & 0 \end{matrix}} \right){I_{\{{j_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }} \cr
&+ \left( {\begin{matrix}
{{i_{2,1,1}}} & 0 \cr
{{i_{2,2,1}}} & 0 \end{matrix}} \right){I_{\{{j_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,2,1}} \le 1,{\rm{~}}{i_{2,1,2}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}.
\end{align*}
A plot of the reliability of the system with
$p^1=p$,
$p^2=p$,
$p^3=1-2p$ (for
$0 \le p \le 0.5$) is presented in Panel (d) of Fig. 1.











Example 3.5 Consider a ternary-state linear  $(2,2)$-connected-
$(2,2)$-connected- $(2,1;2,2;2,2)$-out-of-
$(2,1;2,2;2,2)$-out-of- $(2,2,n)$: G system with overlapping with state space
$(2,2,n)$: G system with overlapping with state space  $\{0,1,2\}$, which is in state
$\{0,1,2\}$, which is in state  $1$ or above if there exist
$1$ or above if there exist  $2$ overlapping blocks of
$2$ overlapping blocks of  $2 \times 2 \times 2$ consecutive components in state
$2 \times 2 \times 2$ consecutive components in state  $1$ or above, and is in state
$1$ or above, and is in state  $2$ if there also exist
$2$ if there also exist  $2$ overlapping blocks of
$2$ overlapping blocks of  $1 \times 2 \times 2$ consecutive components in state
$1 \times 2 \times 2$ consecutive components in state  $2$. Then, according to Section 2.3, we follow the same analysis as in Example 3.3 except that (3) and (4) there need to be replaced by
$2$. Then, according to Section 2.3, we follow the same analysis as in Example 3.3 except that (3) and (4) there need to be replaced by
(3) If
$({w_1},{w_2}) = (1,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}},{\rm{~}}{j_{2,0}} = {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,1,2}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} = &\left( {\begin{matrix}
{{i_{1,1,1}}} & {[({i_{1,1,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix}} \right){I_{\{{j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {[({i_{2,1,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
1 & 2 \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}} = 0,{\rm{~}}{j_{2,0}} = 1\} }};
\end{align*}(4) If
$({w_1},{w_2}) = (2,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}} + {I_{\{{i_{1,0}} \le 1,{\rm{~}}s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }},\cr
{j_{2,0}} =& {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {[({i_{1,2,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \end{matrix}} \right){I_{\{{i_{1,0}}= {j_{1,0}} \le 1\} }} + \left( {\begin{matrix}
1 & 2 \cr
2 & 2 \end{matrix}} \right){I_{\{{i_{1,0}} = 0,{\rm{~}}{j_{1,0}} = 1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {[({i_{2,2,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
1 & 2 \end{matrix}} \right){I_{\{{i_{2,0}} = 0,{\rm{~}}{j_{2,0}} = 1\} }}.
\end{align*}A plot of the reliability of the system with
$p^1=p$,
$p^2=p$,
$p^3=1-2p$ (for
$0 \le p \le 0.5$) is presented in Panel (e) of Fig. 1.











Example 3.6 Consider a ternary-state linear  $(2,2)$-connected-
$(2,2)$-connected- $(2,1;2,2;2,2)!$-out-of-
$(2,1;2,2;2,2)!$-out-of- $(2,2,n)$: G system with overlapping with state space
$(2,2,n)$: G system with overlapping with state space  $\{0,1,2\}$, which is in state
$\{0,1,2\}$, which is in state  $1$ or above if there exist
$1$ or above if there exist  $2$ overlapping blocks of
$2$ overlapping blocks of  $2 \times 2 \times 2$ consecutive components in state
$2 \times 2 \times 2$ consecutive components in state  $1$ or above, and is in state
$1$ or above, and is in state  $2$ if there also exist
$2$ if there also exist  $2$ overlapping blocks of
$2$ overlapping blocks of  $1 \times 2 \times 2$ or
$1 \times 2 \times 2$ or  $2 \times 1 \times 2$ or
$2 \times 1 \times 2$ or  $2 \times 2 \times 1$ consecutive components in state
$2 \times 2 \times 1$ consecutive components in state  $2$. Then, according to Remark 2.4, we follow the same analysis as in Example 3.4 except that (2)–(4) there need to be replaced by
$2$. Then, according to Remark 2.4, we follow the same analysis as in Example 3.4 except that (2)–(4) there need to be replaced by
(2) If
$({w_1},{w_2}) = (2,1)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}},{\rm{~}}{j_{2,0}} = {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,2,1}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{[({i_{1,2,1}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} & {{i_{1,2,2}}} \end{matrix}} \right){I_{\{{j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} = &\left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{[({i_{2,2,1}} + 1) \wedge 2]{I_{\{s = 2\} }}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
1 & {{i_{2,1,2}}} \cr
2 & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}} =0,{\rm{~}}{j_{2,0}} = 1\} }};
\end{align*}(3) If
$({w_1},{w_2}) = (1,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}},{\rm{~}}{j_{2,0}} = {i_{2,0}} + {I_{\{{i_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,1,1}} = 2,{\rm{~}}{i_{2,1,2}} = 1\} }}, \cr
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {[({i_{1,1,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \cr
{{i_{1,2,1}}} & {{i_{1,2,2}}} \end{matrix}} \right){I_{\{{j_{1,0}} \le 1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {[({i_{2,1,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}}={j_{2,0}} \le 1\} }} + \left( {\begin{matrix}
1 & 2 \cr
{{i_{2,2,1}}} & {{i_{2,2,2}}} \end{matrix}} \right){I_{\{{i_{2,0}}=0,{\rm{~}}{j_{2,0}} = 1\} }};
\end{align*}(4) If
$({w_1},{w_2}) = (2,2)$, we have
$a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} = a_{e({{\boldsymbol{i}}_0},{\boldsymbol{i}}),e({{\boldsymbol{j}}_0},{\boldsymbol{j}})}^{{w_1},{w_2}} + {p^s}$
$(s = 0, 1,2)$, with
\begin{align*}
{j_{1,0}} =& {i_{1,0}} + {I_{\{{i_{1,0}} \le 1,{\rm{~}}s \ge 1,{\rm{~}}{i_{1,1,1}} = {i_{1,1,2}} = {i_{1,2,1}} = 2,{\rm{~}}{i_{1,2,2}} = 1\} }},{\rm{~}} \cr
{j_{2,0}} =& [{i_{2,0}} + {I_{\{s = 2\} }}({I_{\{{i_{2,1,2}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }} + {I_{\{{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}+ {I_{\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1\} }})] \wedge 2, \cr
{{\boldsymbol{j}}_1} =& \left( {\begin{matrix}
{{i_{1,1,1}}} & {{i_{1,1,2}}} \cr
{{i_{1,2,1}}} & {[({i_{1,2,2}} + 1) \wedge 2]{I_{\{s \ge 1\} }}} \end{matrix}} \right){I_{\{{i_{1,0}} ={j_{1,0}} \le 1\} }} + \left( {\begin{matrix}
1 & 2 \cr
2 & 2 \end{matrix}} \right){I_{\{{i_{1,0}} =0,{\rm{~}}{j_{1,0}} =1\} }}, \cr
{{\boldsymbol{j}}_2} =& \left( {\begin{matrix}
{{i_{2,1,1}}} & {{i_{2,1,2}}} \cr
{{i_{2,2,1}}} & {[({i_{2,2,2}} + 1) \wedge 2]{I_{\{s = 2\} }}} \end{matrix}} \right){I_{\{{j_{2,0}} \le 1\} }}+ \left( {\begin{matrix}
0 & 0 \cr
-1 & 0 \end{matrix}} \right){I_{\{{j_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,2,1}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }} \end{align*}
\begin{align*}
& + \left( {\begin{matrix}
0 & -1 \cr
0 & 0 \end{matrix}} \right){I_{\{{j_{2,0}} \le 1,{\rm{~}}s = 2,{\rm{~}}{i_{2,1,2}} = 2,{\rm{~}}{i_{2,2,2}} = 1\} }}.
\end{align*}A plot of the reliability of the system with
$p^1=p$,
$p^2=p$,
$p^3=1-2p$ (for
$0 \le p \le 0.5$) is presented in Panel (f) of Fig. 1.

















Example 3.7 The results in Example 3.1 can also be done by using Remark 2.2; in other words, we construct a Markov chain  $\{\tilde{Y}(t),t = 1, \ldots ,n\} $ with state space
$\{\tilde{Y}(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
\tilde{S} =& \left\{{{\boldsymbol{i}} = ({i_{1,2,2}};{i_{2,1,2}},{i_{2,2,2}}):0 \le {i_{1,2,2}} \le 2;{\rm{~}}0 \le {i_{2,1,2}},{i_{2,2,2}} \le 1{\rm{~or~}}{i_{2,1,2}} = 2,{\rm{~}}{i_{2,2,2}} = 0} \right\}.
\end{align*}
\begin{align*}
\tilde{S} =& \left\{{{\boldsymbol{i}} = ({i_{1,2,2}};{i_{2,1,2}},{i_{2,2,2}}):0 \le {i_{1,2,2}} \le 2;{\rm{~}}0 \le {i_{2,1,2}},{i_{2,2,2}} \le 1{\rm{~or~}}{i_{2,1,2}} = 2,{\rm{~}}{i_{2,2,2}} = 0} \right\}.
\end{align*} Note that  $\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
$\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
 \begin{align*}
&{\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} = 2} , {\rm{~}} {{i_{2,1,2}} \le 1 }\right\},{\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} = 2,{\rm{~}}{i_{2,1,2}} = 2} \right\}.
\end{align*}
\begin{align*}
&{\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} = 2} , {\rm{~}} {{i_{2,1,2}} \le 1 }\right\},{\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} = 2,{\rm{~}}{i_{2,1,2}} = 2} \right\}.
\end{align*} Then, the transition matrix is written as  $\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all
$\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$, we have
${\boldsymbol{i}} \in \tilde{S}$, we have  ${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$
${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$  $(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
$(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
 \begin{align*}
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{i_{1,2,2}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }} + 2{I_{\{{i_{1,2,2}} = 2\} }}, \cr
{j_{2,1,2}} =& [({i_{2,1,2}} + 1){I_{\{{i_{2,1,2}} = 0,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}] \vee [2({I_{\{{i_{2,1,2}} = 2\} }} \vee {I_{\{{i_{2,1,2}} = 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}\vee {I_{\{{i_{2,2,2}} = 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }})], \cr
{j_{2,2,2}} =& ({i_{2,2,2}} + 1){I_{\{{j_{2,1,2}} \le 1,{\rm{~}}{i_{2,2,2}} = 0,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}.
\end{align*}
\begin{align*}
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{i_{1,2,2}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }} + 2{I_{\{{i_{1,2,2}} = 2\} }}, \cr
{j_{2,1,2}} =& [({i_{2,1,2}} + 1){I_{\{{i_{2,1,2}} = 0,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}] \vee [2({I_{\{{i_{2,1,2}} = 2\} }} \vee {I_{\{{i_{2,1,2}} = 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}\vee {I_{\{{i_{2,2,2}} = 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }})], \cr
{j_{2,2,2}} =& ({i_{2,2,2}} + 1){I_{\{{j_{2,1,2}} \le 1,{\rm{~}}{i_{2,2,2}} = 0,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}.
\end{align*} With the above analysis, the reliability function of a multi-state linear connected- $(2,1;2,2;$
$(2,1;2,2;$  $2,2)$-out-of-
$2,2)$-out-of- $(2,2,n)$: G system at state
$(2,2,n)$: G system at state  $2$ can be given as
$2$ can be given as  $R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where
$R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where  ${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{14})$ and
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{14})$ and  ${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{14},1)$. A plot of the reliability of the system with
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{14},1)$. A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (a) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (a) of Fig. 1.
Example 3.8 The results in Example 3.2 can also be done by using Remark 2.2; in other words, we construct a Markov chain  $\{\tilde{Y}(t),t = 1, \ldots ,n\} $ with state space
$\{\tilde{Y}(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
\tilde{S} =& \left\{{{\boldsymbol{i}} = ({i_{1,2,2}};{i_{2,1,1}},{i_{2,1,2}},{i_{2,2,1}},{i_{2,2,2}}):0 \le {i_{1,2,2}} \le 2;{\rm{~}}0 \le {i_{2,1,1}}\le 2,{\rm{~}}0\le{i_{2,1,2}} \le 2-I_{\{{i_{2,1,1}} =2\}},}\right. \cr
& 0\le{i_{2,2,1}} \le 2-I_{\{{i_{2,1,1}} =2\}},{\rm{~}}0\le{i_{2,2,2}} \le [2-I_{\{\max({i_{2,1,2}},{i_{2,2,1}}) =2\}}]I_{\{{i_{2,1,1}}{i_{2,1,2}}{i_{2,2,1}}= 0\}},\cr
&\left.{ {\rm{or~}}{i_{2,1,1}}= 3,{\rm{~}}{i_{2,1,2}} ={i_{2,2,1}}={i_{2,2,2}} = 0} \right\}.
\end{align*}
\begin{align*}
\tilde{S} =& \left\{{{\boldsymbol{i}} = ({i_{1,2,2}};{i_{2,1,1}},{i_{2,1,2}},{i_{2,2,1}},{i_{2,2,2}}):0 \le {i_{1,2,2}} \le 2;{\rm{~}}0 \le {i_{2,1,1}}\le 2,{\rm{~}}0\le{i_{2,1,2}} \le 2-I_{\{{i_{2,1,1}} =2\}},}\right. \cr
& 0\le{i_{2,2,1}} \le 2-I_{\{{i_{2,1,1}} =2\}},{\rm{~}}0\le{i_{2,2,2}} \le [2-I_{\{\max({i_{2,1,2}},{i_{2,2,1}}) =2\}}]I_{\{{i_{2,1,1}}{i_{2,1,2}}{i_{2,2,1}}= 0\}},\cr
&\left.{ {\rm{or~}}{i_{2,1,1}}= 3,{\rm{~}}{i_{2,1,2}} ={i_{2,2,1}}={i_{2,2,2}} = 0} \right\}.
\end{align*} Note that  $\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
$\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
 \begin{align*}
&{\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}}=2,{\rm{~}}{i_{2,1,2}} \le 2} \right\}, {\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} = 2,{\rm{~}}{i_{2,1,2}} = 3} \right\}.
\end{align*}
\begin{align*}
&{\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}}=2,{\rm{~}}{i_{2,1,2}} \le 2} \right\}, {\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,2,2}} = 2,{\rm{~}}{i_{2,1,2}} = 3} \right\}.
\end{align*} Then, the transition matrix is written as  $\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all
$\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$, we have
${\boldsymbol{i}} \in \tilde{S}$, we have  ${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$
${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$  $(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
$(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
 \begin{align*}
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{i_{1,2,2}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}+ 2{I_{\{{i_{1,2,2}} = 2\} }}, \cr
{j_{2,1,1}} =& [({i_{2,1,1}} + 1){I_{\{{i_{2,1,1}} \le 1,{\rm{~}}{s_{1,1}} = 2\} }}] \vee [3({I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{{i_{2,1,1}}\ge 1,{\rm{~}} {i_{2,1,2}}\ge 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} \cr
&\vee {I_{\{{i_{2,2,1}}\ge 1,{\rm{~}} {i_{2,2,2}}\ge 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}\vee {I_{\{{i_{2,1,1}}\ge 1,{\rm{~}} {i_{2,2,1}}\ge 1,{\rm{~}}{s_{1,1}} = {s_{2,1}} = 2\} }}\cr
&\vee {I_{\{{i_{2,1,2}}\ge 1,{\rm{~}} {i_{2,2,2}}\ge 1,{\rm{~}}{s_{1,2}} = {s_{2,2}} = 2\} }}\vee {I_{\{{s_{1,1}} = {s_{1,2}} ={s_{2,1}} ={s_{2,2}} = 2\} }})], \cr
{j_{2,1,2}} =& [({i_{2,1,2}} + 1)\wedge 2]{I_{\{{j_{2,1,1}} \le 2,{\rm{~}} {s_{1,2}} = 2\} }},\cr
{j_{2,2,1}} =& [({i_{2,2,1}} + 1)\wedge 2]{I_{\{{j_{2,1,1}} \le 2,{\rm{~}} {s_{2,1}} = 2\} }}, \cr
{j_{2,2,2}} =& [({i_{2,2,2}} + 1)\wedge 2]{I_{\{{j_{2,1,1}} \le 2,{\rm{~}} {s_{2,2}} = 2\} }}.
\end{align*}
\begin{align*}
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{i_{1,2,2}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}+ 2{I_{\{{i_{1,2,2}} = 2\} }}, \cr
{j_{2,1,1}} =& [({i_{2,1,1}} + 1){I_{\{{i_{2,1,1}} \le 1,{\rm{~}}{s_{1,1}} = 2\} }}] \vee [3({I_{\{{i_{2,1,1}} = 3\} }} \vee {I_{\{{i_{2,1,1}}\ge 1,{\rm{~}} {i_{2,1,2}}\ge 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} \cr
&\vee {I_{\{{i_{2,2,1}}\ge 1,{\rm{~}} {i_{2,2,2}}\ge 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}\vee {I_{\{{i_{2,1,1}}\ge 1,{\rm{~}} {i_{2,2,1}}\ge 1,{\rm{~}}{s_{1,1}} = {s_{2,1}} = 2\} }}\cr
&\vee {I_{\{{i_{2,1,2}}\ge 1,{\rm{~}} {i_{2,2,2}}\ge 1,{\rm{~}}{s_{1,2}} = {s_{2,2}} = 2\} }}\vee {I_{\{{s_{1,1}} = {s_{1,2}} ={s_{2,1}} ={s_{2,2}} = 2\} }})], \cr
{j_{2,1,2}} =& [({i_{2,1,2}} + 1)\wedge 2]{I_{\{{j_{2,1,1}} \le 2,{\rm{~}} {s_{1,2}} = 2\} }},\cr
{j_{2,2,1}} =& [({i_{2,2,1}} + 1)\wedge 2]{I_{\{{j_{2,1,1}} \le 2,{\rm{~}} {s_{2,1}} = 2\} }}, \cr
{j_{2,2,2}} =& [({i_{2,2,2}} + 1)\wedge 2]{I_{\{{j_{2,1,1}} \le 2,{\rm{~}} {s_{2,2}} = 2\} }}.
\end{align*} With the above analysis, the reliability function of a multi-state linear connected- $(2,1;2,2;$
$(2,1;2,2;$  $2,2)!$-out-of-
$2,2)!$-out-of- $(2,2,n)$: G system at state
$(2,2,n)$: G system at state  $2$ can be given as
$2$ can be given as  $R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where
$R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where  ${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{149})$ and
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{149})$ and  ${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{149},1)$. A plot of the reliability of the system with
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{149},1)$. A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (b) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (b) of Fig. 1.
Example 3.9 The results in Example 3.3 can also be done by using Remark 2.2; in other words, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ with state space
$\{Y(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
\tilde{S} = &\left\{{{\boldsymbol{i}} = ({i_{1,0}},{i_{1,2,2}};{i_{2,0}},{i_{2,1,2}},{i_{2,2,2}}):} \right.{\rm{~}}0 \le {i_{1,0}},{i_{1,2,2}} \le 1 {\rm{~or~ }}{i_{1,0}} = 2,{i_{1,2,2}} = 0;\cr
&0 \le {i_{2,0}},{i_{2,1,2}},{i_{2,2,2}} \le 1{\rm{~or }} \left. {{i_{2,0}} = 2,{\rm{~}}{i_{2,1,2}} = {i_{2,2,2}} = 0} \right\} .
\end{align*}
\begin{align*}
\tilde{S} = &\left\{{{\boldsymbol{i}} = ({i_{1,0}},{i_{1,2,2}};{i_{2,0}},{i_{2,1,2}},{i_{2,2,2}}):} \right.{\rm{~}}0 \le {i_{1,0}},{i_{1,2,2}} \le 1 {\rm{~or~ }}{i_{1,0}} = 2,{i_{1,2,2}} = 0;\cr
&0 \le {i_{2,0}},{i_{2,1,2}},{i_{2,2,2}} \le 1{\rm{~or }} \left. {{i_{2,0}} = 2,{\rm{~}}{i_{2,1,2}} = {i_{2,2,2}} = 0} \right\} .
\end{align*} Note that  $\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
$\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
 \begin{align*}
&{\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*}
\begin{align*}
&{\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*} Then, the transition matrix is written as  $\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all
$\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$, we have
${\boldsymbol{i}} \in \tilde{S}$, we have  ${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$
${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$  $(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
$(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
 \begin{align*}
{j_{1,0}} = &({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{j_{1,0}} \le 1,{\rm{~}}{i_{1,2,2}} = 0,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}, \cr
{j_{2,0}} = &({i_{2,0}} + {I_{\{{i_{2,1,2}} = 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} + {I_{\{{i_{2,2,2}} = 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}) \wedge 2 , \cr
{j_{2,1,2}} =& ({i_{2,1,2}} + 1){I_{\{{j_{2,0}} \le 1,{\rm{~}}{i_{2,1,2}} = 0,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}, \cr
{j_{2,2,2}} =& ({i_{2,2,2}} + 1){I_{\{{j_{2,0}} \le 1,{\rm{~}}{i_{2,2,2}} = 0,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }},{\rm{~~~~~~~~~~~~~~}}
\end{align*}
\begin{align*}
{j_{1,0}} = &({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{j_{1,0}} \le 1,{\rm{~}}{i_{1,2,2}} = 0,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}, \cr
{j_{2,0}} = &({i_{2,0}} + {I_{\{{i_{2,1,2}} = 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} + {I_{\{{i_{2,2,2}} = 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}) \wedge 2 , \cr
{j_{2,1,2}} =& ({i_{2,1,2}} + 1){I_{\{{j_{2,0}} \le 1,{\rm{~}}{i_{2,1,2}} = 0,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}, \cr
{j_{2,2,2}} =& ({i_{2,2,2}} + 1){I_{\{{j_{2,0}} \le 1,{\rm{~}}{i_{2,2,2}} = 0,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }},{\rm{~~~~~~~~~~~~~~}}
\end{align*} With the above analysis, the reliability function of a multi-state linear connected- $(2,1;2,2;2,$
$(2,1;2,2;2,$  $2)$-out-of-
$2)$-out-of- $(2,2,n)$: G system at state
$(2,2,n)$: G system at state  $2$ can be given as
$2$ can be given as  $R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where
$R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where  ${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{44})$ and
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{44})$ and  ${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{44},1)$. A plot of the reliability of the system with
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{44},1)$. A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (c) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (c) of Fig. 1.
Example 3.10 The results in Example 3.4 can also be done by using Remark 2.2; in other words, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ with state space
$\{Y(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
\tilde{S} = &\left\{{{\boldsymbol{i}} = ({i_{1,0}},{i_{1,2,2}};{i_{2,0}},{i_{2,1,1}},{i_{2,1,2}},{i_{2,2,1}},{i_{2,2,2}}):{\rm{~}}0 \le {i_{1,0}},{i_{1,2,2}} \le 1{\rm{~or~ }}{i_{1,0}} = 2, {\rm{~}}{i_{1,2,2}} = 0;{\rm{~}}0 \le {i_{2,0}}} \right.\cr
& \le 1,{\rm{~}}0\le{i_{2,1,1}} \le 2,{\rm{~}} 0 \le {i_{2,1,2}}\le 2-I_{\{{i_{2,1,1}}=2\}},{\rm{~}} 0 \le {i_{2,2,1}}\le 2-I_{\{{i_{2,1,1}}=2\}},{\rm{~}} 0 \le {i_{2,2,2}}\le\cr
&\left.{[2-I_{\{\max({i_{2,1,2}},{i_{2,2,1}})=2\}}]I_{\{{i_{2,1,1}}{i_{2,1,2}}{i_{2,2,1}}=0\}},{\rm{or~ }}{i_{2,0}} = 2,{i_{2,1,1}} = {i_{2,1,2}}= {i_{2,2,1}} = {i_{2,2,2}}= 0} \right\} .
\end{align*}
\begin{align*}
\tilde{S} = &\left\{{{\boldsymbol{i}} = ({i_{1,0}},{i_{1,2,2}};{i_{2,0}},{i_{2,1,1}},{i_{2,1,2}},{i_{2,2,1}},{i_{2,2,2}}):{\rm{~}}0 \le {i_{1,0}},{i_{1,2,2}} \le 1{\rm{~or~ }}{i_{1,0}} = 2, {\rm{~}}{i_{1,2,2}} = 0;{\rm{~}}0 \le {i_{2,0}}} \right.\cr
& \le 1,{\rm{~}}0\le{i_{2,1,1}} \le 2,{\rm{~}} 0 \le {i_{2,1,2}}\le 2-I_{\{{i_{2,1,1}}=2\}},{\rm{~}} 0 \le {i_{2,2,1}}\le 2-I_{\{{i_{2,1,1}}=2\}},{\rm{~}} 0 \le {i_{2,2,2}}\le\cr
&\left.{[2-I_{\{\max({i_{2,1,2}},{i_{2,2,1}})=2\}}]I_{\{{i_{2,1,1}}{i_{2,1,2}}{i_{2,2,1}}=0\}},{\rm{or~ }}{i_{2,0}} = 2,{i_{2,1,1}} = {i_{2,1,2}}= {i_{2,2,1}} = {i_{2,2,2}}= 0} \right\} .
\end{align*} Note that  $\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
$\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
 \begin{align*}
& {\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*}
\begin{align*}
& {\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*} Then, the transition matrix is written as  $\tilde{\boldsymbol{A}} = \left({{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all
$\tilde{\boldsymbol{A}} = \left({{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$, we have
${\boldsymbol{i}} \in \tilde{S}$, we have  ${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$
${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$  $(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
$(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
 \begin{align*}
{j_{1,0}} =& ({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{j_{1,0}} \le 1,{\rm{~}}{i_{1,2,2}} = 0,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}} s_{2,2} \ge 1\}}},\cr
{j_{2,0}} =& [{i_{2,0}} + ({I_{\{A_1\} }} + {I_{\{A_4\} }})\vee( {I_{\{{A_2\} }}} + {I_{\{A_3\} }})\vee {I_{\{A_5\} }}] \wedge 2, \cr
{j_{2,1,1}} =& [({i_{2,1,1}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{1,1}}= 2\} }}(1-{I_{\{A_1\} }} \vee{I_{\{A_2\} }}\vee {I_{\{\bar A_3 \bar A_4 A_5\} }}), \cr
{j_{2,1,2}} =& [({i_{2,1,2}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{1,2}}= 2\} }}(1-{I_{\{\bar A_1 A_2\} }} \vee{I_{\{\bar A_1 \bar A_3 A_4\} }}\vee {I_{\{\bar A_1 \bar A_3 A_5\} }}), \end{align*}
\begin{align*}
{j_{1,0}} =& ({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
{j_{1,2,2}} =& ({i_{1,2,2}} + 1){I_{\{{j_{1,0}} \le 1,{\rm{~}}{i_{1,2,2}} = 0,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}} s_{2,2} \ge 1\}}},\cr
{j_{2,0}} =& [{i_{2,0}} + ({I_{\{A_1\} }} + {I_{\{A_4\} }})\vee( {I_{\{{A_2\} }}} + {I_{\{A_3\} }})\vee {I_{\{A_5\} }}] \wedge 2, \cr
{j_{2,1,1}} =& [({i_{2,1,1}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{1,1}}= 2\} }}(1-{I_{\{A_1\} }} \vee{I_{\{A_2\} }}\vee {I_{\{\bar A_3 \bar A_4 A_5\} }}), \cr
{j_{2,1,2}} =& [({i_{2,1,2}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{1,2}}= 2\} }}(1-{I_{\{\bar A_1 A_2\} }} \vee{I_{\{\bar A_1 \bar A_3 A_4\} }}\vee {I_{\{\bar A_1 \bar A_3 A_5\} }}), \end{align*} \begin{align*}
{j_{2,2,1}} =& [({i_{2,2,1}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{2,1}}= 2\} }}(1-{I_{\{A_1\} }} \vee{I_{\{\bar A_2 A_3\} }}\vee {I_{\{\bar A_2\bar A_4 A_5\} }}), \cr
{j_{2,2,2}} =& [({i_{2,2,2}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{2,2}}= 2\} }}(1-{I_{\{\bar A_1 \bar A_2 A_3\} }}\vee{I_{\{\bar A_1 \bar A_2 A_4\} }}\vee {I_{\{\bar A_1 \bar A_2 A_5\} }}),
\end{align*}
\begin{align*}
{j_{2,2,1}} =& [({i_{2,2,1}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{2,1}}= 2\} }}(1-{I_{\{A_1\} }} \vee{I_{\{\bar A_2 A_3\} }}\vee {I_{\{\bar A_2\bar A_4 A_5\} }}), \cr
{j_{2,2,2}} =& [({i_{2,2,2}} + 1)\wedge 2]{I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{2,2}}= 2\} }}(1-{I_{\{\bar A_1 \bar A_2 A_3\} }}\vee{I_{\{\bar A_1 \bar A_2 A_4\} }}\vee {I_{\{\bar A_1 \bar A_2 A_5\} }}),
\end{align*}where
 \begin{align*}
&{A_1}={\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{2,1}} = 2\} },\cr
&{A_2}={\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} },\cr
&{A_3}={\{{i_{2,2,1}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} },\cr
&{A_4}={\{{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{1,2}} = {s_{2,2}} = 2\} },\cr
&{A_5}={\{{s_{1,1}} = {s_{1,2}} ={s_{2,1}} = {s_{2,2}} = 2\} }.
\end{align*}
\begin{align*}
&{A_1}={\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{2,1}} = 2\} },\cr
&{A_2}={\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} },\cr
&{A_3}={\{{i_{2,2,1}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} },\cr
&{A_4}={\{{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{1,2}} = {s_{2,2}} = 2\} },\cr
&{A_5}={\{{s_{1,1}} = {s_{1,2}} ={s_{2,1}} = {s_{2,2}} = 2\} }.
\end{align*} With the above analysis, the reliability function of a multi-state linear connected- $(2,1;2,2;2,$
$(2,1;2,2;2,$  $2)!$-out-of-
$2)!$-out-of- $(2,2,n)$: G system at state
$(2,2,n)$: G system at state  $2$ can be given as
$2$ can be given as  $R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where
$R = {\boldsymbol{\pi}}{\tilde {\boldsymbol{A}}^n}{\boldsymbol{u}}^T$, where  ${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{494})$ and
${\boldsymbol{\pi}} = (1,\underbrace {0, \ldots ,0}_{494})$ and  ${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{494},1)$. A plot of the reliability of the system with
${\boldsymbol{u}} = (\underbrace {0, \ldots ,0}_{494},1)$. A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (d) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (d) of Fig. 1.
Example 3.11 The results in Example 3.5 can also be done by using Remark 2.2. In this case, the discussion is the same as in Example 3.9 with the elements of the transition matrix  $\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$ being all zero, except that for all
$\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$ being all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$,
${\boldsymbol{i}} \in \tilde{S}$,  ${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$
${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$  $(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
$(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
 \begin{align*}
& {j_{1,0}} = ({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
& {j_{1,2,2}} = ({i_{1,2,2}} + {I_{\{{i_{1,2,2}} = 0\} }}){I_{\{{j_{1,0}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}, \cr
& {j_{2,0}} = ({i_{2,0}} + {I_{\{{i_{2,1,2}} = 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} + {I_{\{{i_{2,2,2}} = 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}) \wedge 2, \cr
& {j_{2,1,2}} = ({i_{2,1,2}} + {I_{\{{i_{2,1,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}, \cr
& {j_{2,2,2}} = ({i_{2,2,2}} + {I_{\{{i_{2,2,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}. \end{align*}
\begin{align*}
& {j_{1,0}} = ({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
& {j_{1,2,2}} = ({i_{1,2,2}} + {I_{\{{i_{1,2,2}} = 0\} }}){I_{\{{j_{1,0}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}, \cr
& {j_{2,0}} = ({i_{2,0}} + {I_{\{{i_{2,1,2}} = 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} + {I_{\{{i_{2,2,2}} = 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}) \wedge 2, \cr
& {j_{2,1,2}} = ({i_{2,1,2}} + {I_{\{{i_{2,1,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }}, \cr
& {j_{2,2,2}} = ({i_{2,2,2}} + {I_{\{{i_{2,2,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }}. \end{align*} A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (e) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (e) of Fig. 1.
Example 3.12 The results in Example 3.6 can also be done by using Remark 2.2; in other words, we construct a Markov chain  $\{Y(t),t = 1, \ldots ,n\} $ with state space
$\{Y(t),t = 1, \ldots ,n\} $ with state space
 \begin{align*}
\tilde{S} = &\left\{{{\boldsymbol{i}} = ({i_{1,0}},{i_{1,2,2}};{i_{2,0}},{i_{2,1,1}},{i_{2,1,2}},{i_{2,2,1}},{i_{2,2,2}}):{\rm{~}}0 \le {i_{1,0}}, {i_{1,2,2}} \le 1{\rm{~or~ }}{i_{1,0}} = 2, {\rm{~}}{i_{1,2,2}}= 0;} \right.\cr
& 0 \le {i_{2,0}}\le 1,{\rm{~}}0\le{i_{2,1,1}} \le 2,{\rm{~}} 0 \le {i_{2,1,2}}\le 2-I_{\{{i_{2,1,1}}=2\}},{\rm{~}} 0 \le {i_{2,2,1}}\le 2-I_{\{{i_{2,1,1}}=2\}},\cr
& \left. {0 \le {i_{2,2,2}}\le 2-I_{\{\max({i_{2,1,2}},{i_{2,2,1}})=2\}}{\rm{~or~ }} {i_{2,0}} = 2,{\rm{~}}{i_{2,1,1}}= {i_{2,1,2}}= {i_{2,2,1}} = {i_{2,2,2}}= 0} \right\} .
\end{align*}
\begin{align*}
\tilde{S} = &\left\{{{\boldsymbol{i}} = ({i_{1,0}},{i_{1,2,2}};{i_{2,0}},{i_{2,1,1}},{i_{2,1,2}},{i_{2,2,1}},{i_{2,2,2}}):{\rm{~}}0 \le {i_{1,0}}, {i_{1,2,2}} \le 1{\rm{~or~ }}{i_{1,0}} = 2, {\rm{~}}{i_{1,2,2}}= 0;} \right.\cr
& 0 \le {i_{2,0}}\le 1,{\rm{~}}0\le{i_{2,1,1}} \le 2,{\rm{~}} 0 \le {i_{2,1,2}}\le 2-I_{\{{i_{2,1,1}}=2\}},{\rm{~}} 0 \le {i_{2,2,1}}\le 2-I_{\{{i_{2,1,1}}=2\}},\cr
& \left. {0 \le {i_{2,2,2}}\le 2-I_{\{\max({i_{2,1,2}},{i_{2,2,1}})=2\}}{\rm{~or~ }} {i_{2,0}} = 2,{\rm{~}}{i_{2,1,1}}= {i_{2,1,2}}= {i_{2,2,1}} = {i_{2,2,2}}= 0} \right\} .
\end{align*} Note that  $\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
$\tilde{S} = {\tilde{S}_0} \cup {\tilde{S}_1} \cup {\tilde{S}_2}$, where
 \begin{align*}
& {\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}} {\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*}
\begin{align*}
& {\tilde{S}_0} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} \le 1} \right\}, {\rm{~~}}
{\tilde{S}_1} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} \le 1} \right\}, {\rm{~~}} {\tilde{S}_2} = \left\{{{\boldsymbol{i}} \in \tilde{S}:{i_{1,0}} = 2,{\rm{~}}{i_{2,0}} = 2} \right\}.
\end{align*} Then, the transition matrix is written as  $\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all
$\tilde{\boldsymbol{A}} = \left( {{\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}}} \right)$, wherein the elements are all zero, except that for all  ${\boldsymbol{i}} \in \tilde{S}$, we have
${\boldsymbol{i}} \in \tilde{S}$, we have  ${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$
${\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} = {\tilde{a}_{{\tilde{e}}({\boldsymbol{i}}),{\tilde{e}}({\boldsymbol{j}})}} + {p^{{s_{1,1}}}}{p^{{s_{1,2}}}}{p^{{s_{2,1}}}}{p^{{s_{2,2}}}}$  $(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
$(0 \le {s_{1,1}},{s_{1,2}},{s_{2,1}},{s_{2,2}} \le 2)$, with
 \begin{align*}
{j_{1,0}} =& ({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
{j_{1,2,2}} =& ({i_{1,2,2}} + {I_{\{{i_{1,2,2}} = 0\} }}){I_{\{{j_{1,0}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}, \cr
{j_{2,0}} =& ({i_{2,0}} + {I_{\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{2,1}} = 2\} }}+ {I_{\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} \cr
&+ {I_{\{{i_{2,2,1}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }} + {I_{\{{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{1,2}} = {s_{2,2}} = 2\} }}\cr
&+ {I_{\{{s_{1,1}} = {s_{1,2}} ={s_{2,1}} = {s_{2,2}} = 2\} }}) \wedge 2, \cr
{j_{2,1,1}} =& ({i_{2,1,1}} + {I_{\{{i_{2,1,1}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{1,1}} = 2\} }},\cr
{j_{2,1,2}} =& ({i_{2,1,2}} + {I_{\{{i_{2,1,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{1,2}} = 2\} }},\cr
{j_{2,2,1}} =& ({i_{2,2,1}} + {I_{\{{i_{2,2,1}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{2,1}} = 2\} }},\cr
{j_{2,2,2}} =& ({i_{2,2,2}} + {I_{\{{i_{2,2,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{2,2}} = 2\} }}.
\end{align*}
\begin{align*}
{j_{1,0}} =& ({i_{1,0}} + {I_{\{{i_{1,2,2}} = 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}) \wedge 2, \cr
{j_{1,2,2}} =& ({i_{1,2,2}} + {I_{\{{i_{1,2,2}} = 0\} }}){I_{\{{j_{1,0}} \le 1,{\rm{~}}{s_{1,1}} \ge 1,{\rm{~}}{s_{1,2}} \ge 1,{\rm{~}}{s_{2,1}} \ge 1,{\rm{~}}{s_{2,2}} \ge 1\} }}, \cr
{j_{2,0}} =& ({i_{2,0}} + {I_{\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,2,1}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{2,1}} = 2\} }}+ {I_{\{{i_{2,1,1}} \ge 1,{\rm{~}}{i_{2,1,2}} \ge 1,{\rm{~}}{s_{1,1}} = {s_{1,2}} = 2\} }} \cr
&+ {I_{\{{i_{2,2,1}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{2,1}} = {s_{2,2}} = 2\} }} + {I_{\{{i_{2,1,2}} \ge 1,{\rm{~}}{i_{2,2,2}} \ge 1,{\rm{~}}{s_{1,2}} = {s_{2,2}} = 2\} }}\cr
&+ {I_{\{{s_{1,1}} = {s_{1,2}} ={s_{2,1}} = {s_{2,2}} = 2\} }}) \wedge 2, \cr
{j_{2,1,1}} =& ({i_{2,1,1}} + {I_{\{{i_{2,1,1}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{1,1}} = 2\} }},\cr
{j_{2,1,2}} =& ({i_{2,1,2}} + {I_{\{{i_{2,1,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{1,2}} = 2\} }},\cr
{j_{2,2,1}} =& ({i_{2,2,1}} + {I_{\{{i_{2,2,1}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{2,1}} = 2\} }},\cr
{j_{2,2,2}} =& ({i_{2,2,2}} + {I_{\{{i_{2,2,2}} = 0\} }}){I_{\{{j_{2,0}} \le 1,{\rm{~}} {s_{2,2}} = 2\} }}.
\end{align*} A plot of the reliability of the system with  $p^1=p$,
$p^1=p$,  $p^2=p$,
$p^2=p$,  $p^3=1-2p$ (for
$p^3=1-2p$ (for  $0 \le p \le 0.5$) is presented in Panel (f) of Fig. 1.
$0 \le p \le 0.5$) is presented in Panel (f) of Fig. 1.
In the above discussions, the proposed FMCIA methods (including the main FMCIA and the alternative one described in Remark 2.2) provide accurate evaluation except that in Panel (d) of Fig. 1, a minor underestimation is present because of some blocks with low contributions being missing, and the FMCIA in Remark 2.2 provides accurate evaluation for Panel (f) in Fig. 1 while the main FMCIA provides values that are a little lower due to missing blocks with low contributions. Computational times required for the main FMICIA and its alternative in Remark 2.2 are reported in Table 3 for Panels (a)–(f) of Fig. 1, from which we readily observe that the method described in Remark 2.2 facilitates a far more computational efficient process than the main FMCIA, especially for Panels (c)–(f) of Fig. 1 due to the complexity involved in them.
4. Concluding remarks
In this work, we have proposed different types of multi-state linear three-dimensional consecutive- $k$ systems. Their reliability functions have all been derived by using the FMCIA, and the computational process has been shown with several illustrative examples. Related results can be directly generalized to the
$k$ systems. Their reliability functions have all been derived by using the FMCIA, and the computational process has been shown with several illustrative examples. Related results can be directly generalized to the  $d$-dimensional case; see the Appendix for a related pseudocode. The efficiency of the main FMCIA and the one in Remark 2.2 has been compared using Table 3. In fact, roughly speaking, the former one depends mainly on
$d$-dimensional case; see the Appendix for a related pseudocode. The efficiency of the main FMCIA and the one in Remark 2.2 has been compared using Table 3. In fact, roughly speaking, the former one depends mainly on  $\prod\nolimits_{u=1}^{M}l_u\cdot (k^3_u)^{n_1n_2}$ and the latter one depends mainly on
$\prod\nolimits_{u=1}^{M}l_u\cdot (k^3_u)^{n_1n_2}$ and the latter one depends mainly on  $\prod\nolimits_{u=1}^{M}l_u\cdot (k^3_u)^{(n_1-k_1+1)(n_2-k_2+1)}$, which means the methods will be more efficient for systems with smaller
$\prod\nolimits_{u=1}^{M}l_u\cdot (k^3_u)^{(n_1-k_1+1)(n_2-k_2+1)}$, which means the methods will be more efficient for systems with smaller  $n_1,n_2,\boldsymbol{k}_3$ and it does not matter whether
$n_1,n_2,\boldsymbol{k}_3$ and it does not matter whether  $n_3$ is large or not; see Table 1 in Yi et al. [Reference Yi, Balakrishnan and Li29] for some detailed discussions for the binary-state case. To further improve the evaluation efficiency of system reliability, a technique based on the Kronecker product, as discussed in Yi et al. [Reference Yi, Balakrishnan and Li31, Reference Yi, Balakrishnan and Li32], can be generalized and applied here. Applications of the systems discussed here can be found in multifunctional sensing systems in chemical plants, fire prevention early warning systems in forests, low-altitude traffic communication systems and some other reliability systems. Finally, the results established here may be extended in different directions:
$n_3$ is large or not; see Table 1 in Yi et al. [Reference Yi, Balakrishnan and Li29] for some detailed discussions for the binary-state case. To further improve the evaluation efficiency of system reliability, a technique based on the Kronecker product, as discussed in Yi et al. [Reference Yi, Balakrishnan and Li31, Reference Yi, Balakrishnan and Li32], can be generalized and applied here. Applications of the systems discussed here can be found in multifunctional sensing systems in chemical plants, fire prevention early warning systems in forests, low-altitude traffic communication systems and some other reliability systems. Finally, the results established here may be extended in different directions:
(1) Linear structure can be generalized to circular structure for multi-state two/three-dimensional consecutive
$k$-type systems;(2) Markov dependency can be taken into consideration to generalize the independence assumption for component state distribution;
(3) Shared components can be considered for multi-state two/three-dimensional consecutive-type systems in linear/zigzag structure;
(4) Reliability measures such as system signature [Reference Gao, Tu and Qiu11, Reference Wang, Wang, Chen, Ning and Zhou26] and component importance [Reference Lisnianski, Frenkel and Ding17] can also be studied for the above systems. We are at present exploring this research angle and hope to report our findings soon.

Acknowledgements
This work was supported by the Beijing Natural Science Foundation (No. 9242011), the National Natural Science Foundation of China (No. U2469202 and No. W2411066), the China Scholarship Council, the Fundamental Research Funds for the Central Universities (buctrc202102) and the Funds for First-class Discipline Construction (XK1802-5), and the Natural Sciences and Engineering Research Council of Canada (to the first author) through an Individual Discovery Grant (RGPIN-2020-06733). We also express our sincere thanks to the Editorial Board Member and the anonymous reviewers for their useful comments and suggestions on an earlier version of this manuscript, which resulted in this improved version.
Appendix A. Appendix. Pseudocode for generalized FMCIA for the
$d$-dimensional case

FMCIA for multi-state linear  $d$-dimensional consecutive
$d$-dimensional consecutive  $k$-type systems.
$k$-type systems.




















































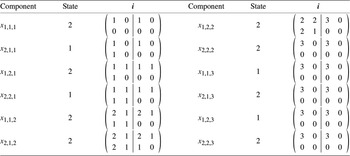



 Open access
Open access