

1 Introduction
Dynamical systems are abstract mathematical models of systems whose state evolves according to a prescribed rule. They are often used to model natural phenomena, and have an enormous range of applications. This versatility, however, makes them notoriously hard to analyse in general. The last decades have seen an increasing use of computers in the study and analysis of dynamical systems, which have resulted in a number of theoretical breakthroughs; a notable example is the role that computers played in both the discovery of the Lorenz attractors through numerical simulations [Reference Lorenz26] and the mathematical proof (40 years later) of their existence [Reference Tucker36], in which computers were used to assist the proof by verifying that certain quantitative conditions hold through certified computations. In fact, the use of computers to explore the properties of dynamical systems so as to make conjectures about their behavior and even to find ideas of how to prove those conjectures, is becoming increasingly popular among working mathematicians.
Although there exist countless papers in the literature about computations in dynamical systems, only a small fraction of them address the problem rigorously: that is, how far is the sought actual quantity from the computed one? And can a computer really perform such computation up to a very small pre-specified error?
An important example where these questions are of interest is given by the reachability problem: given a finite description of a system, can we use a computer-aided procedure to guarantee that, if the system starts at a given initial state, its evolution will never reach some ‘unsafe region’ [Reference Asarin, Maler and Pnueli2, Reference Collins15]?
Several results have been obtained in this direction. In general, although bounded-time simulations are usually possible, the long-term behavior features of many of the interesting systems may be very hard to compute.
The idea here is that, since rich enough physical systems can, in theory, perform universal computation in the sense that they can simulate any Turing machine [Reference Cardona, Miranda and Peralta-Salas12, Reference Cardona, Miranda, Peralta-Salas and Presas14, Reference Graça and Zhong21, Reference Minsky28, Reference Siegelmann and Sontag35, Reference Von Neumann38], the computational unsolvability of problems such as the halting problem [Reference Turing37] entails the computational unpredictability of this kind of system—most of their long-term properties are non-computable [Reference Asarin, Maler and Pnueli2, Reference Braverman and Yampolsky9, Reference Braverman and Yampolsky10, Reference Galatolo, Hoyrup and Rojas18, Reference Koiran, Cosnard and Garzon25, Reference Moore29, Reference Reif, Tygar and Yoshida31].
On the other hand, it has also been observed that the computational capabilities of these systems may be affected by restricting some of the features related to their physical plausibility, such as degrees of freedom, compactness, regularity or robustness—the long-term behavior of such restricted systems may be easier to predict [Reference Asarin and Bouajjani1, Reference Braverman, Grigo and Rojas6–Reference Braverman, Rojas and Schneider8, Reference Cardona, Miranda and Peralta-Salas13, Reference Israeli and Goldenfeld24].
The mathematical theory of dynamical systems provides a landscape of dynamical properties that a system may exhibit in the long term. At one end, there are systems with a rather ‘ordered’ dynamics, in the sense that most nearby initial conditions remain close in time and give rise to individual trajectories whose common behavior is easy to describe, for example, when most of initial conditions converge to the same fixed point (or periodic orbit). In particular, in this case, the reachability problem typically becomes decidable, and it is usually possible to give a rigorous computational description of the limiting dynamics [Reference Asarin and Bouajjani1, Reference Bournez, Graça, Hainry, Hlinený and Kucera3].
At the other end, we have chaotic systems, where sensitivity to initial conditions makes it impossible to simulate, in practice, individual trajectories for an extended period of time. In this case, instead of attempting to describe individual trajectories, one should study the limit set of collections of typical trajectories—both as a spatial and as a statistical invariant object [Reference Palis30]. The structure of these attractors encapsulates the properties of the asymptotic behavior of the underlying systems, and therefore constitutes the objects that should be sought to be computed for their analysis and prediction.
A number of results have been obtained in this direction, showing a variety of possibilities from the point of view of the algorithmic complexity of describing the limiting behavior of a typical orbit [Reference Braverman and Yampolsky9, Reference de Menibus and Sablik16, Reference Graça, Rojas and Zhong20, Reference Rojas and Yampolsky33, Reference Rojas and Yampolsky34].
In this paper, we introduce a general framework based on computable analysis to study and classify dynamical systems according to the computational difficulty of computing arbitrarily good approximations of their attractors. Although, in general, a dynamical system may have several (even infinitely many) different attractors, in this paper we choose to focus on the case of systems whose overall dynamical picture is ‘simple’ in the sense that they have a unique well-defined limiting behavior, which is followed by all ‘typical’ initial conditions. Our main goal is to obtain insight into the computational difficulty of the problem of describing this unique limiting behavior, and on how it depends on the dynamical properties of the system.
The case of systems having more than one typical asymptotic behavior is also interesting and we plan to study it in future work.
1.1 Structure of the paper and main results
We begin with a discussion on the concept of attractor in §2.1, where the three versions to be studied—topological, metric and statistical attractors—are introduced. The language we use to bound their algorithmic complexity is introduced in §2.2. It is intended to capture the difficulty of computing a complete description of these attractors as closed sets. Modulo some technicalities, it essentially amounts to determining the complexity in the arithmetical hierarchy of the problem of deciding whether a given rational ball intersects the set.
Section 3 is devoted to providing general upper bounds on the complexity of computing the attractor for each of the three different types introduced. We also study the effect that different dynamical properties have on these bounds. Although, in general, transitivity does not affect them, other properties, such as being strongly attracting, minimal or exact, force the attractor to be strictly less complex.
Section 4 contains the main contributions of this paper. It is devoted to showing that the upper bounds we obtain in §3 are tight. All the examples in this section are within the class of computable symbolic systems. Their symbolic nature makes them suitable for constructing examples of systems whose attractors are maximally complex, but whose overall dynamics is still possible to understand, and thus provides insight into how algorithmic complexity is built into the attractor by the evolution of the system’s dynamics. Our examples show that, for each type of attractor, there are computable systems with an attractor of the corresponding type that is complete for the upper bounds given in the previous section. Although in many natural cases these three types of attractors coincide (and, therefore, have the same complexity), in general they can be different. These are known as wild attractors. In Theorem 4.3, we show that systems with wild attractors can have extremely different algorithmic complexities. In particular, we construct examples of systems whose metric (respectively, topological) attractor is maximally complex (
 $\Pi _2$
-complete), whereas its topological (respectively, metric) attractor is computationally extremely simple.
$\Pi _2$
-complete), whereas its topological (respectively, metric) attractor is computationally extremely simple.
Finally, in §5 we explore this question for computable transformations of the unit interval. It is natural to expect that the more restricted topological nature of these maps might impose additional computability constraints on their attractors, as is, for example, the case for topological entropy [Reference Gangloff, Herrera, Rojas and Sablik19]. However, at least for metric attractors, we show that this is not the case by exhibiting computable interval maps with different dynamical properties with a metric attractor matching the corresponding upper bound.
1.2 Related work
These results raise a lot of interesting questions: for example, whether our upper bounds are tight for more restricted classes of systems. Inspired by a preliminary version of the present work, this question has been studied for the class of cellular automata [Reference Esnay, Núñez and Törmä17], where several examples are provided. Another interesting direction is to study classes of systems that are restricted by analytic properties, such as their degree of regularity. In the unit interval, for example, it was shown in [Reference Rojas and Yampolsky33] that attractors of maps from the logistic family are always computable sets, but the problem is largely open for more general smooth maps. Other dynamical properties, such as some form of hyperbolicity, should also make attractors easier to compute. The geometric Lorenz attractor, for example, was shown to be computable in [Reference Graça, Rojas and Zhong20] by exploiting this property. More generally, according to the physical Church–Turing thesis, anything that can be computed by a physical device (however it is constructed) can also be computed by a Turing machine. Therefore, ‘physically plausible’ systems should have computable attractors. Thus, a very interesting challenge is to find a set of dynamical conditions that make the attractor computable, and that can be applied to a large set of systems. Finally, an important related question, that we do not explore here, is to characterize the algorithmic complexity of attractors for generic maps within a given family of dynamical systems.
2 Preliminary definitions
2.1 On the concept of attractor
Let
 $T:X\to X$
be a continuous transformation over a compact set X on which a natural reference measure
$T:X\to X$
be a continuous transformation over a compact set X on which a natural reference measure
 $\unicode{x3bb} $
can be defined, which we call a Lebesgue measure. The notion of attractors is simple: they are invariant sets supporting the asymptotic dynamics of typical orbits. Although the intuition behind this idea is quite clear, it is not as easy to provide a precise definition and, in fact, several different definitions exist in the literature—we refer the reader to [Reference Milnor27], where an extended discussion of these issues is presented. In all cases, it seems that any reasonable definition of attractor should at least include the following two points.
$\unicode{x3bb} $
can be defined, which we call a Lebesgue measure. The notion of attractors is simple: they are invariant sets supporting the asymptotic dynamics of typical orbits. Although the intuition behind this idea is quite clear, it is not as easy to provide a precise definition and, in fact, several different definitions exist in the literature—we refer the reader to [Reference Milnor27], where an extended discussion of these issues is presented. In all cases, it seems that any reasonable definition of attractor should at least include the following two points.
-
(1) An attractor must describe the limiting behavior of a large set of initial conditions (called its basin of attraction).
-
(2) All parts of the attractor should play a role in describing the limiting behavior of the points in its basin of attraction.
Although there are many examples of systems possessing several (even infinitely many) different attractors, we see this phenomenon as a strong source of additional complexity in the description of the limiting behavior of the system, which we would like to avoid in the analysis we do in this work. Therefore, we choose to focus our study on systems that are ‘well behaved’ in the sense that they exhibit a unique typical limiting behavior, which is followed by most initial conditions. Our goal is to understand the computational difficulty of describing this well-defined, unique limiting behavior.
In formalizing the two points above in our intuitive definition of attractor, the idea of ‘large’ will mean either generic or full measure with respect to some natural reference measure, which we denote by
 $\unicode{x3bb} $
. (A set is generic if it contains a countable intersection of open and dense sets. The complement of a generic set is called meager.)
$\unicode{x3bb} $
. (A set is generic if it contains a countable intersection of open and dense sets. The complement of a generic set is called meager.)
In addition, one can also consider (at least) two different ways in which the attractor may describe the limiting behavior. The first possibility is to consider a topological description. Recall that
 $\omega (x)$
denotes the set of accumulation points of the sequence
$\omega (x)$
denotes the set of accumulation points of the sequence
 $x, T(x), T^{2}(x), \ldots $
of iterates of x under T. For a closed invariant set
$x, T(x), T^{2}(x), \ldots $
of iterates of x under T. For a closed invariant set
 $A\subset X$
, the realm of topological attraction (we do note require it to be an open set, which is why we do not call it the basin) of A is defined to be the set
$A\subset X$
, the realm of topological attraction (we do note require it to be an open set, which is why we do not call it the basin) of A is defined to be the set
 $$ \begin{align*} \rho(A) = \{ x : \omega(x)\subset A\}. \end{align*} $$
$$ \begin{align*} \rho(A) = \{ x : \omega(x)\subset A\}. \end{align*} $$
Following Milnor [Reference Milnor27], we use the following definition.
Definition 2.1. A closed set
 $A\subset X$
will be called a metric attractor if:
$A\subset X$
will be called a metric attractor if:
-
• its topological basin of attraction
 $\rho (A)$
, has full measure; and
$\rho (A)$
, has full measure; and -
• there is no strictly smaller closed set
$A'\subset A$
for which
$\rho (A')$
has positive measure.



Similarly, A will be called a topological attractor if:
-
• its topological basin of attraction
$\rho (A)$
is generic; and -
• there is no strictly smaller closed set
$A'\subset A$
so that
$\rho (A')$
is not meager.



The second possibility is to consider that attractors describe the asymptotic dynamics in a statistical way. For a given point
 $x\in X$
, consider the sequence of measures
$x\in X$
, consider the sequence of measures
 $$ \begin{align*} \nu_{n}(x) = \frac{1}{n} \sum_{i<n} \delta_{T^{i}(x)} \end{align*} $$
$$ \begin{align*} \nu_{n}(x) = \frac{1}{n} \sum_{i<n} \delta_{T^{i}(x)} \end{align*} $$
and call
 $\nu _{x}$
its limit in the weak* topology of measures, provided, of course, that this limit exists. The measure
$\nu _{x}$
its limit in the weak* topology of measures, provided, of course, that this limit exists. The measure
 $\nu _{x}$
thus describes the asymptotic statistical distribution of the system when started at x.
$\nu _{x}$
thus describes the asymptotic statistical distribution of the system when started at x.
Definition 2.2. A closed set
 $A\subset X$
is called a statistical (or physical) attractor, if there exists a unique invariant measure
$A\subset X$
is called a statistical (or physical) attractor, if there exists a unique invariant measure
 $\mu $
such that:
$\mu $
such that:
-
(i)
$\text {supp}(\mu ) = A$
; and -
(ii)
$\mu = \nu _{x}$
for almost every x (with respect to the reference measure
$\unicode{x3bb} $
).



The measure
 $\mu $
in the definition above describes the statistics of the limiting behavior when the system is started at a random initial condition. Such a measure is usually referred to as physical [Reference Young39].
$\mu $
in the definition above describes the statistics of the limiting behavior when the system is started at a random initial condition. Such a measure is usually referred to as physical [Reference Young39].
In addition to the requirements of the previous definitions (in its topological or statistical versions), we are interested in how the computational complexity of the attractor is affected by the dynamical properties of the system. Therefore, we will consider the following additional properties that constrain the behavior of the system in different ways.
Definition 2.3. An attractor A (of any kind) is said to be:
-
• strongly attracting if there exists an open neighborhood U of A such that
$T(\overline {U})\subset U$
and
$A= \bigcap _{n} T^{n}(U)$
; -
• minimal if the orbit of every point in A is dense in A;
-
• transitive if there exists a point in A whose orbit is dense in A; and
-
• exact if every ball B intersecting A has an iterate
$ T^{n}B$
that covers A.



These are classical dynamical properties in the theory of dynamical systems. For example, attractors of hyperbolic systems are typically strongly attracting and transitive [Reference Bowen4], whereas attractors in the logistic family are typically transitive and exact, and sometimes even minimal, but never strongly attracting unless they are finite.
2.2 Rudiments of computable analysis
In this section, we recall notions from computable analysis on metric spaces. All the results presented here are well known. For a detailed modern exposition, we refer to [Reference Brattka and Hertling5]. In the following, we will make use of the word algorithm to mean a computer program written in any standard programming language or, more formally, a Turing machine [Reference Turing37]. Algorithms are assumed to be only capable of manipulating integers. By identifying countable sets with integers in a constructive way, we can let algorithms work on these countable sets as well. For example, algorithms can manipulate rational numbers by identifying each
 $p/q$
with some integer n in such a way that both p and q can be computed from n, and vice versa. We fix such a numbering from now on.
$p/q$
with some integer n in such a way that both p and q can be computed from n, and vice versa. We fix such a numbering from now on.
2.2.1 Computable metric spaces
Definition 2.4. A computable metric space is a triple
 $(X,d,\mathcal {S})$
, where
$(X,d,\mathcal {S})$
, where
 $(X,d)$
is a metric space and
$(X,d)$
is a metric space and
 $\mathcal {S} = \{s_i : i \ge 0\}$
is a countable dense subset of X, whose elements are called ideal points, such that there exists an algorithm which, upon input
$\mathcal {S} = \{s_i : i \ge 0\}$
is a countable dense subset of X, whose elements are called ideal points, such that there exists an algorithm which, upon input
 $(i,j,n) \in \mathbb {N}^{3}$
, outputs
$(i,j,n) \in \mathbb {N}^{3}$
, outputs
 $r\in \mathbb {Q}$
such that
$r\in \mathbb {Q}$
such that
 $$ \begin{align*}|d(s_i,s_j)-r| \le 2^{-n}.\end{align*} $$
$$ \begin{align*}|d(s_i,s_j)-r| \le 2^{-n}.\end{align*} $$
We say that the distances between ideal points are uniformly computable.
For
 $r>0$
a rational number and x an element of X, we denote by
$r>0$
a rational number and x an element of X, we denote by
 $B(x,r) = \{ z \in X \ : \ d(z,x)<r\}$
and by
$B(x,r) = \{ z \in X \ : \ d(z,x)<r\}$
and by
 $\overline {B}(x,r) = \{ z \in X \ : \ d(z,x)\leq r\}$
, respectively, the open and closed ball with center x and radius r. The balls centered on elements of
$\overline {B}(x,r) = \{ z \in X \ : \ d(z,x)\leq r\}$
, respectively, the open and closed ball with center x and radius r. The balls centered on elements of
 $\mathcal {S}$
with rational radii are called ideal balls. A computable enumeration of the ideal balls
$\mathcal {S}$
with rational radii are called ideal balls. A computable enumeration of the ideal balls
 $B_{n}=B(s^{(n)},r^{(n)})$
can be obtained by taking, for example, a bi-computable bijection
$B_{n}=B(s^{(n)},r^{(n)})$
can be obtained by taking, for example, a bi-computable bijection
 $\varphi :\mathbb {N} \rightarrow \mathbb {N} \times \mathbb {Q}$
and letting
$\varphi :\mathbb {N} \rightarrow \mathbb {N} \times \mathbb {Q}$
and letting
 $s^{(n)} = s_{\varphi _1 (n)}$
and
$s^{(n)} = s_{\varphi _1 (n)}$
and
 $r^{(n)} = \varphi _2 (n)$
, where
$r^{(n)} = \varphi _2 (n)$
, where
 $\varphi (n) = (\varphi _1 (n),\varphi _2 (n))$
. We fix such a computable enumeration from now on. For any subset I (finite or infinite) of
$\varphi (n) = (\varphi _1 (n),\varphi _2 (n))$
. We fix such a computable enumeration from now on. For any subset I (finite or infinite) of
 $\mathbb {N}$
, we denote by
$\mathbb {N}$
, we denote by
 $\mathcal {U}_{I}$
the collection of ideal balls
$\mathcal {U}_{I}$
the collection of ideal balls
 $B_n$
with
$B_n$
with
 $n \in I$
and by
$n \in I$
and by
 $U_{I}$
the union of these balls, that is,
$U_{I}$
the union of these balls, that is,
 $$ \begin{align*}U_{I} = \bigcup_{n \in I} B_n.\end{align*} $$
$$ \begin{align*}U_{I} = \bigcup_{n \in I} B_n.\end{align*} $$
An open set
 $V\subset X$
is lower computable (or r.e.) if
$V\subset X$
is lower computable (or r.e.) if
 $V=U_I$
for some recursively enumerable (r.e.)
$V=U_I$
for some recursively enumerable (r.e.)
 $I\subset \mathbb {N}$
. That is, there is an algorithm which halts on some
$I\subset \mathbb {N}$
. That is, there is an algorithm which halts on some
 $n\in \mathbb {N}$
if and only if
$n\in \mathbb {N}$
if and only if
 $n\in I$
. A point
$n\in I$
. A point
 $x\in X$
is computable if
$x\in X$
is computable if
 $\{x\}=\bigcap _{n\in I} B_n$
for some r.e.
$\{x\}=\bigcap _{n\in I} B_n$
for some r.e.
 $I\subset \mathbb {N}$
.
$I\subset \mathbb {N}$
.
Example 2.1. The following examples will be important for us. In particular, example (c) provides the definition of computable probability measure.
-
(a) For a finite alphabet
$\mathcal {A}$
with
$0$
as one of its elements, the Cantor space
$\mathcal {A}^{\mathbb {N}}$
with its usual metric has a natural computable metric space structure in which the ideal points can be taken to be
$\mathcal {S} = \{w0^{\infty }: w \in \mathcal {A}^{*}\}$
, where
$\mathcal {A}^*$
denotes the set of all finite words that can be made with the symbols of
$\mathcal {A}$
. In this case, the ideal balls are the cylinders (see §4.1). -
(b) The compact interval
$[0,1]$
, with its usual metric and
$\mathcal {S}=\mathbb {Q}\cap [0,1]$
is also a computable metric space. The ideal balls here are the open intervals with rational endpoints. -
(c) If X is a compact computable metric space, then the set
$M_X$
of probability measures over X can also be made a computable metric space [Reference Galatolo, Hoyrup and Rojas18] with a metric that induces the weak topology on
$M_X$
. In particular, we automatically obtain a notion of computable probability measure, namely, those corresponding to the computable elements of this space.










Regarding the notion of computable measure alluded to in the preceding example, we will only use the following characterization (see, for example, [Reference Hoyrup and Rojas23]).
Proposition 2.2. Let
 $\mu $
be a probability measure over a computable metric space X. Then
$\mu $
be a probability measure over a computable metric space X. Then
 $\mu $
is computable if and only if
$\mu $
is computable if and only if
 $\mu (B_{i_1}\cup B_{i_2}\cup \cdots \cup B_{i_n})$
is lower computable uni- formly in
$\mu (B_{i_1}\cup B_{i_2}\cup \cdots \cup B_{i_n})$
is lower computable uni- formly in
 $i_1,\ldots , i_n$
in the sense that there exists an algorithm which, upon input
$i_1,\ldots , i_n$
in the sense that there exists an algorithm which, upon input
 $i_1,\ldots , i_n$
and k, outputs a rational number whose supremum over k equals
$i_1,\ldots , i_n$
and k, outputs a rational number whose supremum over k equals
 $\mu (B_{i_1}\cup B_{i_2}\cup \cdots \cup B_{i_n})$
.
$\mu (B_{i_1}\cup B_{i_2}\cup \cdots \cup B_{i_n})$
.
Let
 $(X,d)$
and
$(X,d)$
and
 $(X',d')$
be computable metric spaces. We denote by
$(X',d')$
be computable metric spaces. We denote by
 $(B^{\prime }_m)_m$
an enumeration of ideal balls of
$(B^{\prime }_m)_m$
an enumeration of ideal balls of
 $X'$
. A function
$X'$
. A function
 $T : X \rightarrow X'$
is computable if there exists an algorithm which, given as input some integer m, enumerates a set
$T : X \rightarrow X'$
is computable if there exists an algorithm which, given as input some integer m, enumerates a set
 $I_m$
such that
$I_m$
such that
 $$ \begin{align*}T^{-1} (B^{\prime}_m) = U_{I_m}.\end{align*} $$
$$ \begin{align*}T^{-1} (B^{\prime}_m) = U_{I_m}.\end{align*} $$
It follows that computable functions are continuous. It is perhaps more intuitively familiar, and provably equivalent, to think of a computable function as one for which there is an algorithm that, provided with arbitrarily good approximations of x, outputs arbitrarily good approximations of
 $T(x)$
. In symbolic spaces, this can easily be made precise.
$T(x)$
. In symbolic spaces, this can easily be made precise.
Example 2.3. In Cantor space
 $\mathcal {A}^{\mathbb {N}}$
, a function
$\mathcal {A}^{\mathbb {N}}$
, a function
 $T : \mathcal {A}^{\mathbb {N}} \rightarrow \mathcal {A}^{\mathbb {N}}$
is computable if and only if there exists some non-decreasing computable function
$T : \mathcal {A}^{\mathbb {N}} \rightarrow \mathcal {A}^{\mathbb {N}}$
is computable if and only if there exists some non-decreasing computable function
 $\varphi : \mathbb {N} \rightarrow \mathbb {N}$
together with an algorithm that, provided with the
$\varphi : \mathbb {N} \rightarrow \mathbb {N}$
together with an algorithm that, provided with the
 $\varphi (n)$
first symbols of the sequence x, computes the nth first symbols of the sequence
$\varphi (n)$
first symbols of the sequence x, computes the nth first symbols of the sequence
 $T(x)$
.
$T(x)$
.
A function T is effectively open if there is an algorithm that, given as input some integer m, enumerates a set
 $I_m$
such that
$I_m$
such that
 $T(B_m)=U_{I_m}$
.
$T(B_m)=U_{I_m}$
.
A compact set
 $K\subset X$
is said to be recursively compact if the inclusion
$K\subset X$
is said to be recursively compact if the inclusion
 $$ \begin{align*}K \subset U_I,\end{align*} $$
$$ \begin{align*}K \subset U_I,\end{align*} $$
where I is some finite subset of
 $\mathbb {N}$
, is semi-decidable: that is, if there is an algorithm that, given I as input, halts if and only if the inclusion above is verified.
$\mathbb {N}$
, is semi-decidable: that is, if there is an algorithm that, given I as input, halts if and only if the inclusion above is verified.
Example 2.4. The Cantor space and the compact interval are easily seen to be recursively compact.
A closed subset
 $E \subset X$
is said to be upper computable (or effective or co-r.e.) if its complement
$E \subset X$
is said to be upper computable (or effective or co-r.e.) if its complement
 $X \backslash K $
is a lower computable open set. It is called lower computable if the relationship
$X \backslash K $
is a lower computable open set. It is called lower computable if the relationship
 $E\cap B_i\neq \emptyset $
can be semi-decided uniformly for all ideal balls
$E\cap B_i\neq \emptyset $
can be semi-decided uniformly for all ideal balls
 $B_i$
. Finally, E is called computable if it is both lower and upper computable.
$B_i$
. Finally, E is called computable if it is both lower and upper computable.
We also make use of the following fact. We include a proof for the reader’s convenience.
Proposition 2.5. Let
 $(X,d,\mathcal {S})$
be a recursively compact computable metric space. A closed subset
$(X,d,\mathcal {S})$
be a recursively compact computable metric space. A closed subset
 $K \subset X$
is upper computable if and only if it is recursively compact.
$K \subset X$
is upper computable if and only if it is recursively compact.
Proof. Suppose that K is recursively compact and let
 $\overline {B}\subset X$
be a closed ideal ball. Note that, since
$\overline {B}\subset X$
be a closed ideal ball. Note that, since
 $X\setminus \overline {B}$
is lower computable, by the recursive compactness of K we can semi-decide whether
$X\setminus \overline {B}$
is lower computable, by the recursive compactness of K we can semi-decide whether
 $K\subset (X\setminus \overline {B}) \iff K\cap \overline {B} = \emptyset $
, and thus recursively enumerate all ideal balls B with this property. Noting that their union equals
$K\subset (X\setminus \overline {B}) \iff K\cap \overline {B} = \emptyset $
, and thus recursively enumerate all ideal balls B with this property. Noting that their union equals
 $X\setminus K$
, we see that K is upper computable. Now, suppose that K is upper computable and let
$X\setminus K$
, we see that K is upper computable. Now, suppose that K is upper computable and let
 $U\subset X$
be a lower computable open set. We show that we can semi-decide whether U covers K. Note that U covers K exactly when
$U\subset X$
be a lower computable open set. We show that we can semi-decide whether U covers K. Note that U covers K exactly when
 $U\cup (X\setminus K)$
covers X. Thus, if K is upper computable, then
$U\cup (X\setminus K)$
covers X. Thus, if K is upper computable, then
 $U\cup (X\setminus K)$
is lower computable, and the desired result follows from recursive compactness of X.
$U\cup (X\setminus K)$
is lower computable, and the desired result follows from recursive compactness of X.
Example 2.6. If X is a recursively compact computable metric space, then the set
 $\mathcal {M}_X$
of probability measures is also a recursively compact computable metric space. Moreover, if
$\mathcal {M}_X$
of probability measures is also a recursively compact computable metric space. Moreover, if
 $T:X\to X$
is a computable map, then the set of invariant measures
$T:X\to X$
is a computable map, then the set of invariant measures
 $\mathcal {M}_T$
is upper computable, and therefore recursively compact as well (see [Reference Galatolo, Hoyrup and Rojas18]).
$\mathcal {M}_T$
is upper computable, and therefore recursively compact as well (see [Reference Galatolo, Hoyrup and Rojas18]).
2.2.2 Computational structure of closed sets
Previous results on the computability of attractors imply that they are, in general, non-computable [Reference Braverman and Yampolsky9, Reference Graça, Zhong and Buescu22]. Thus, since we are interested in describing the general computational structure that attractors possess, we need notions able to capture their levels of non-computability. We will do this by carefully identifying the information that is actually hard to compute and measuring its computational hardness through the complexities of their integer representations in the usual arithmetical hierarchy (see [Reference Rogers32] for standard definitions). We briefly recall the definition here. A set
 $A\subset \mathbb {N}$
is said to be
$A\subset \mathbb {N}$
is said to be
 $\Pi _n$
-computable if there exists a computable map
$\Pi _n$
-computable if there exists a computable map
 $f:\mathbb {N}^{n+1}\to \{0,1\}$
that satisfies
$f:\mathbb {N}^{n+1}\to \{0,1\}$
that satisfies
 $$ \begin{align*}i\in A\Longleftrightarrow\ \underset{n \text{ alternating quantifiers}} {\underbrace{\text{ for all } i_1,\text{ there exists } i_2,\text{ for all } i_3,\ldots}}\quad f(i,i_1,\ldots,i_k)=1,\end{align*} $$
$$ \begin{align*}i\in A\Longleftrightarrow\ \underset{n \text{ alternating quantifiers}} {\underbrace{\text{ for all } i_1,\text{ there exists } i_2,\text{ for all } i_3,\ldots}}\quad f(i,i_1,\ldots,i_k)=1,\end{align*} $$
and
 $\Sigma _n$
-computable if there exists a computable map
$\Sigma _n$
-computable if there exists a computable map
 $f:\mathbb {N}^{n+1}\to \{0,1\}$
that satisfies
$f:\mathbb {N}^{n+1}\to \{0,1\}$
that satisfies
 $$ \begin{align*}i\in A\Longleftrightarrow\ \underset{n \text{ alternating quantifiers}} {\underbrace{\text{ there exists } i_1,\text{ for all } i_2,\text{ there exists } i_3,\ldots}}\quad f(i,i_1,\ldots,i_k)=1.\end{align*} $$
$$ \begin{align*}i\in A\Longleftrightarrow\ \underset{n \text{ alternating quantifiers}} {\underbrace{\text{ there exists } i_1,\text{ for all } i_2,\text{ there exists } i_3,\ldots}}\quad f(i,i_1,\ldots,i_k)=1.\end{align*} $$
The definition of computability for compact sets, say, in the plane for simplicity, is equivalent to having an algorithm that can draw the set on a computer screen with arbitrary precision. Roughly, this means that one can zoom in at any point in the set to produce arbitrarily high magnifications of it. To achieve this, one must be able to determine, at any given resolution, whether or not a pixel must be colored. Lower computability represents the task of detecting whether a given pixel must be colored, and upper computability represents the task of detecting whether it has to be left uncolored. The following definition is intended to measure the degree of unsolvability of either of these tasks for a given compact set.
Let K be a compact subset of a computable metric space X. The inner (or intersecting) and outer collections of ideal balls of K, denoted respectively by
 $\mathcal {B}_{\mathrm{in}}(K)$
and
$\mathcal {B}_{\mathrm{in}}(K)$
and
 $\mathcal {\overline {B}}_{\mathrm{out}}(K)$
, are defined by
$\mathcal {\overline {B}}_{\mathrm{out}}(K)$
, are defined by
 $$ \begin{align*} \mathcal{B}_{\mathrm{in}}(K) = \{ i\in\mathbb{N} : B_{i}\cap K \neq \emptyset \} \quad \text{and}\quad \mathcal{\overline{B}}_{\mathrm{out}}(K) = \{ i\in\mathbb{N} : \overline{B}_{i}\cap K = \emptyset \}. \end{align*} $$
$$ \begin{align*} \mathcal{B}_{\mathrm{in}}(K) = \{ i\in\mathbb{N} : B_{i}\cap K \neq \emptyset \} \quad \text{and}\quad \mathcal{\overline{B}}_{\mathrm{out}}(K) = \{ i\in\mathbb{N} : \overline{B}_{i}\cap K = \emptyset \}. \end{align*} $$
We remark that, in general, the closure of the ball
 $B_i$
may be different from the closed ball
$B_i$
may be different from the closed ball
 $\overline {B}_i$
.
$\overline {B}_i$
.
We measure the computational cost of describing closed subsets of X by measuring the complexity of computing their inner and/or outer collections of ideal balls.
Definition 2.5.
K is said to be
 $\mathit {\Sigma _{n}}$
(respectively,
$\mathit {\Sigma _{n}}$
(respectively,
 $\mathit {\Pi _{n}}$
) if its inner (respectively, outer) collection is
$\mathit {\Pi _{n}}$
) if its inner (respectively, outer) collection is
 $\Sigma _{n}$
. If K is both
$\Sigma _{n}$
. If K is both
 $\Sigma _{n}$
and
$\Sigma _{n}$
and
 $\Pi _{n}$
, then we simply say that it is
$\Pi _{n}$
, then we simply say that it is
 $\Delta _{n}$
.
$\Delta _{n}$
.
We say that K is
 $\Sigma _{n}$
-complete if it is
$\Sigma _{n}$
-complete if it is
 $\Sigma _{n}$
and any other
$\Sigma _{n}$
and any other
 $K'$
can be reduced to K in the sense that, provided with an enumeration of the inner collection of K, we can enumerate the inner collection of
$K'$
can be reduced to K in the sense that, provided with an enumeration of the inner collection of K, we can enumerate the inner collection of
 $K'$
. A
$K'$
. A
 $\Pi _{n}$
-complete closed set is defined in a similar way.
$\Pi _{n}$
-complete closed set is defined in a similar way.
The following proposition shows that the hierarchy of closed sets obtained with the previous definition is consistent with the arithmetic hierarchy.
Proposition 2.7. If K is
 $\Sigma _{n}$
(respectively,
$\Sigma _{n}$
(respectively,
 $\Pi _{n}$
), then it is
$\Pi _{n}$
), then it is
 $\Pi _{n+1}$
(respectively,
$\Pi _{n+1}$
(respectively,
 $\Sigma _{n+1}$
).
$\Sigma _{n+1}$
).
3 Computability obstructions in attractors realization: complexity upper bounds
In this section, we provide general obstructions that bound the maximal complexity that attractors may exhibit according to their types.
Theorem 3.1. Let X be a recursively compact computable metric space, let
 $T:X\longrightarrow X$
be a computable map, let
$T:X\longrightarrow X$
be a computable map, let
 $\unicode{x3bb} $
be a computable reference measure and let A be a closed subset of X that is invariant by T.
$\unicode{x3bb} $
be a computable reference measure and let A be a closed subset of X that is invariant by T.
-
(i) If A is a topological attractor, then it is a
$\Pi _{2}$
set. -
(ii) If A is a metric attractor, then it is a
$\Pi _{2}$
set. -
(iii) If A is a statistical attractor, then it is
$\Sigma _{2}$
. -
(iv) If A is strongly attracting, then it is
$\Pi _{1}$
.




Now, assume that A is
 $\Pi _{n}$
with
$\Pi _{n}$
with
 $n=1, 2$
.
$n=1, 2$
.
-
(v) If A is minimal, then it is also
$\Sigma _{n}$
. -
(vi) Suppose, in addition, that T is effectively open. If the action of T on A is exact, then A is also
$\Sigma _{n}$
.


Proof. For a given ideal ball
 $B_{i}$
, denote by
$B_{i}$
, denote by
 $\tilde {\rho }(\overline {B}_i)$
the set of points x such that
$\tilde {\rho }(\overline {B}_i)$
the set of points x such that
 $\omega (x)$
intersects
$\omega (x)$
intersects
 $\overline {B}_i$
: that is,
$\overline {B}_i$
: that is,
 $$ \begin{align*} \tilde{\rho}(\overline{B}_i) =\bigg\{x\in X: \omega(x)\bigcap\overline{B}_i\ne\emptyset\bigg\}=\bigcap_k\bigcap_N\bigcup_{n\geq N} T^{-n}B\bigg(\overline{B}_i,\frac{1}{k}\bigg),\end{align*} $$
$$ \begin{align*} \tilde{\rho}(\overline{B}_i) =\bigg\{x\in X: \omega(x)\bigcap\overline{B}_i\ne\emptyset\bigg\}=\bigcap_k\bigcap_N\bigcup_{n\geq N} T^{-n}B\bigg(\overline{B}_i,\frac{1}{k}\bigg),\end{align*} $$
where
 $B(K,\epsilon )=\{x\in X:d(x,K)<\epsilon \}$
is an open upper approximation of K at precision
$B(K,\epsilon )=\{x\in X:d(x,K)<\epsilon \}$
is an open upper approximation of K at precision
 $\epsilon $
. Note that
$\epsilon $
. Note that
 $\tilde {\rho }(\overline {B}_i)$
is a
$\tilde {\rho }(\overline {B}_i)$
is a
 $G_{\delta }$
set (not necessarily dense or of positive measure). We remark that
$G_{\delta }$
set (not necessarily dense or of positive measure). We remark that
 $\rho (A)\subset \tilde {\rho }(A)$
.
$\rho (A)\subset \tilde {\rho }(A)$
.
Proof of
 $(i)$
: Let A be the topological attractor of the map T. We first show that the closure of an ideal ball
$(i)$
: Let A be the topological attractor of the map T. We first show that the closure of an ideal ball
 $\overline {B}_i$
does not intersect A if and only if
$\overline {B}_i$
does not intersect A if and only if
 $\tilde {\rho }(\overline {B}_i)$
is not dense.
$\tilde {\rho }(\overline {B}_i)$
is not dense.
If
 $\overline {B}_i\cap A=\emptyset $
, the orbits started at points in
$\overline {B}_i\cap A=\emptyset $
, the orbits started at points in
 $\rho (A)$
must accumulate in A and so can visit
$\rho (A)$
must accumulate in A and so can visit
 $B(\overline {B}_i,\epsilon )$
only finitely many times for sufficiently small
$B(\overline {B}_i,\epsilon )$
only finitely many times for sufficiently small
 $\epsilon $
. In other words,
$\epsilon $
. In other words,
 ${\tilde {\rho }(\overline {B}_i)\cap \rho (A)=\emptyset }$
. By definition, the realm of attraction of A,
${\tilde {\rho }(\overline {B}_i)\cap \rho (A)=\emptyset }$
. By definition, the realm of attraction of A,
 $\rho (A)$
, contains a dense
$\rho (A)$
, contains a dense
 $G_{\delta }$
set, and thus
$G_{\delta }$
set, and thus
 $\tilde {\rho }(\overline {B}_i)$
cannot be dense by Baire’s category theorem.
$\tilde {\rho }(\overline {B}_i)$
cannot be dense by Baire’s category theorem.
Conversely, if
 $\tilde {\rho }(\overline {B}_i)$
is not dense, then there exists a ball B that does not intersect
$\tilde {\rho }(\overline {B}_i)$
is not dense, then there exists a ball B that does not intersect
 $\tilde {\rho }(\overline {B}_i)$
. But
$\tilde {\rho }(\overline {B}_i)$
. But
 $B\cap \rho (A)$
is not meager, so, by minimality of A, which is the second requirement of Definition 2.1, one has
$B\cap \rho (A)$
is not meager, so, by minimality of A, which is the second requirement of Definition 2.1, one has
 $\omega (B\cap \rho (A))=A$
. It follows that
$\omega (B\cap \rho (A))=A$
. It follows that
 $\overline {B}_i\cap A=\emptyset $
since an element of B visits
$\overline {B}_i\cap A=\emptyset $
since an element of B visits
 $B(\overline {B}_i,\epsilon )$
only finitely many times for sufficiently small
$B(\overline {B}_i,\epsilon )$
only finitely many times for sufficiently small
 $\epsilon $
.
$\epsilon $
.
Now, for a given ideal ball
 $B_i$
, one has
$B_i$
, one has
 $$ \begin{align*} \overline{B}_i\cap A\ne\emptyset&\Longleftrightarrow\ \tilde{\rho}(\overline{B}_i) \text{ dense}\\ &\Longleftrightarrow \text{ for all } j\in\mathbb{N},\quad \tilde{\rho}(\overline{B}_i)\cap B_j\ne\emptyset\\ &\Longleftrightarrow \text{ for all } j,k, n\in\mathbb{N},\text{ there exists } m\in\mathbb{N}, \quad \!\kern-1pt\bigcup_{t=n}^m T^{-t}B\bigg(\overline{B}_i,\frac{1}{k}\bigg)\cap B_j\ne\emptyset. \end{align*} $$
$$ \begin{align*} \overline{B}_i\cap A\ne\emptyset&\Longleftrightarrow\ \tilde{\rho}(\overline{B}_i) \text{ dense}\\ &\Longleftrightarrow \text{ for all } j\in\mathbb{N},\quad \tilde{\rho}(\overline{B}_i)\cap B_j\ne\emptyset\\ &\Longleftrightarrow \text{ for all } j,k, n\in\mathbb{N},\text{ there exists } m\in\mathbb{N}, \quad \!\kern-1pt\bigcup_{t=n}^m T^{-t}B\bigg(\overline{B}_i,\frac{1}{k}\bigg)\cap B_j\ne\emptyset. \end{align*} $$
It is clear that
 $B(\overline {B}_i,{1}/{k})$
is a lower computable open set. Moreover, since T is computable, we can enumerate, uniformly in
$B(\overline {B}_i,{1}/{k})$
is a lower computable open set. Moreover, since T is computable, we can enumerate, uniformly in
 $i,k,n$
and m, ideal balls whose union is
$i,k,n$
and m, ideal balls whose union is
 $\bigcup _{t=n}^m T^{-t}B(\overline {B}_i,{1}/{k})$
. As the intersection of lower computable open sets is again lower computable, we deduce that it is uniformly semi-decidable if the intersection is non-empty. It follows that
$\bigcup _{t=n}^m T^{-t}B(\overline {B}_i,{1}/{k})$
. As the intersection of lower computable open sets is again lower computable, we deduce that it is uniformly semi-decidable if the intersection is non-empty. It follows that
 $\{i\in \mathbb {N}:\overline {B}_i\cap A\ne \emptyset \}$
is a
$\{i\in \mathbb {N}:\overline {B}_i\cap A\ne \emptyset \}$
is a
 $\Pi _2$
-computable set.
$\Pi _2$
-computable set.
Proof of
 $(ii)$
: Let A be the metric attractor of the map T. We first show that an ideal ball
$(ii)$
: Let A be the metric attractor of the map T. We first show that an ideal ball
 $\overline {B}_i$
does not intersect A if and only if
$\overline {B}_i$
does not intersect A if and only if
 $\tilde {\rho }(\overline {B}_i)$
has null measure.
$\tilde {\rho }(\overline {B}_i)$
has null measure.
If
 $\overline {B}_i\cap A=\emptyset $
, one has
$\overline {B}_i\cap A=\emptyset $
, one has
 $\tilde {\rho }(\overline {B}_i)\cap \rho (A)=\emptyset $
. By definition, the realm of attraction of A has measure one so
$\tilde {\rho }(\overline {B}_i)\cap \rho (A)=\emptyset $
. By definition, the realm of attraction of A has measure one so
 $\unicode{x3bb} (\tilde {\rho }(\overline {B}_i))=0$
.
$\unicode{x3bb} (\tilde {\rho }(\overline {B}_i))=0$
.
Conversely, assume that
 $\overline {B}_i\cap A\ne \emptyset $
. Since A is the only metric attractor, by the second requirement of Definition 2.1, we deduce that, for all ideal balls
$\overline {B}_i\cap A\ne \emptyset $
. Since A is the only metric attractor, by the second requirement of Definition 2.1, we deduce that, for all ideal balls
 $B_j$
such that
$B_j$
such that
 ${A\cap B_j\ne \emptyset }$
, one has
${A\cap B_j\ne \emptyset }$
, one has
 $\unicode{x3bb} (\rho (A\cap B_j^c))=0$
, where
$\unicode{x3bb} (\rho (A\cap B_j^c))=0$
, where
 $B_j^c=X\setminus B_j$
; otherwise,
$B_j^c=X\setminus B_j$
; otherwise,
 $A\cap B_j^c$
would be a metric attractor strictly included in A, which would violate the requirement. Thus,
$A\cap B_j^c$
would be a metric attractor strictly included in A, which would violate the requirement. Thus,
 $$ \begin{align*} \unicode{x3bb}\bigg(\bigcup_{\{j \, : \, B_j\cap A \neq \emptyset\}} \rho(A\cap B_j^c)\bigg) = 0. \end{align*} $$
$$ \begin{align*} \unicode{x3bb}\bigg(\bigcup_{\{j \, : \, B_j\cap A \neq \emptyset\}} \rho(A\cap B_j^c)\bigg) = 0. \end{align*} $$
But this is exactly the set of points
 $x\in X$
such that
$x\in X$
such that
 $\omega (x)\subsetneq A$
. It follows that
$\omega (x)\subsetneq A$
. It follows that
 $\omega (x)=A$
for almost every x. Since
$\omega (x)=A$
for almost every x. Since
 $\overline {B}_i\cap A\ne \emptyset $
, one deduces that
$\overline {B}_i\cap A\ne \emptyset $
, one deduces that
 $\overline {B}_i\cap \omega (x)\neq \emptyset $
for almost every x, and thus
$\overline {B}_i\cap \omega (x)\neq \emptyset $
for almost every x, and thus
 $\unicode{x3bb} (\tilde {\rho }(\overline {B}_i))=1$
.
$\unicode{x3bb} (\tilde {\rho }(\overline {B}_i))=1$
.
Now, for
 $B_i$
an ideal ball, one has
$B_i$
an ideal ball, one has
 $$ \begin{align*} \overline{B}_i\cap A\ne\emptyset&\Longleftrightarrow\ \unicode{x3bb}(\tilde{\rho}(\overline{B}_i))=1\\ &\Longleftrightarrow \text{ for all } l,k, n\in\mathbb{N}, \text{ there exists } m\in\mathbb{N},\\ &\qquad\quad \unicode{x3bb}\bigg(\bigcup_{t=n}^mT^{-t}\bigg(B\bigg(\overline{B}_i,\frac{1}{k}\bigg)\bigg)\bigg)>1-2^{-l}. \end{align*} $$
$$ \begin{align*} \overline{B}_i\cap A\ne\emptyset&\Longleftrightarrow\ \unicode{x3bb}(\tilde{\rho}(\overline{B}_i))=1\\ &\Longleftrightarrow \text{ for all } l,k, n\in\mathbb{N}, \text{ there exists } m\in\mathbb{N},\\ &\qquad\quad \unicode{x3bb}\bigg(\bigcup_{t=n}^mT^{-t}\bigg(B\bigg(\overline{B}_i,\frac{1}{k}\bigg)\bigg)\bigg)>1-2^{-l}. \end{align*} $$
Since T is computable, the set
 $\bigcup _{t=n}^mT^{-t}(B(\overline {B}_i,{1}/{k}))$
is lower computable. Thus, by Proposition 2.2, so is its measure, which we can then semi-decide to be greater than any given rational number. It follows that
$\bigcup _{t=n}^mT^{-t}(B(\overline {B}_i,{1}/{k}))$
is lower computable. Thus, by Proposition 2.2, so is its measure, which we can then semi-decide to be greater than any given rational number. It follows that
 $\{i\in \mathbb {N}:\overline {B}_i\cap A\ne \emptyset \}$
is a
$\{i\in \mathbb {N}:\overline {B}_i\cap A\ne \emptyset \}$
is a
 $\Pi _2$
-computable set.
$\Pi _2$
-computable set.
Proof of
 $(iii)$
: Let A be the statistical attractor of the map T and let
$(iii)$
: Let A be the statistical attractor of the map T and let
 $\mu $
be the invariant measure supported on A, which satisfies
$\mu $
be the invariant measure supported on A, which satisfies
 $\mu = \nu _{x}$
for almost every x with respect to
$\mu = \nu _{x}$
for almost every x with respect to
 $\unicode{x3bb} $
. Given a continuous function
$\unicode{x3bb} $
. Given a continuous function
 $\varphi :X\to \mathbb {R}$
, one has
$\varphi :X\to \mathbb {R}$
, one has
where
 $\unicode{x3bb} _n=({1}/{n})\sum _{t=0}^{n-1}T^t_{*}\unicode{x3bb} $
. Since T is computable,
$\unicode{x3bb} _n=({1}/{n})\sum _{t=0}^{n-1}T^t_{*}\unicode{x3bb} $
. Since T is computable,
 $\mu $
is the weak limit as
$\mu $
is the weak limit as
 $n\to \infty $
of the uniformly computable sequence
$n\to \infty $
of the uniformly computable sequence
 $(\unicode{x3bb} _n)_{n\in \mathbb {N}}$
. By Proposition 2.2 and the fact that the complement of a closed ideal ball is lower computable, it follows that there exists an algorithm that takes as input
$(\unicode{x3bb} _n)_{n\in \mathbb {N}}$
. By Proposition 2.2 and the fact that the complement of a closed ideal ball is lower computable, it follows that there exists an algorithm that takes as input
 $n,k$
and l and returns a rational number
$n,k$
and l and returns a rational number
 $q_{n,k,l}$
whose infimum over l equals
$q_{n,k,l}$
whose infimum over l equals
 $\unicode{x3bb} _n(\overline {B_k})$
. Now, for
$\unicode{x3bb} _n(\overline {B_k})$
. Now, for
 $B_i$
an ideal ball, one has
$B_i$
an ideal ball, one has

We deduce that
 $\{i\in \mathbb {N}:B_i\cap A\ne \emptyset \}$
is a
$\{i\in \mathbb {N}:B_i\cap A\ne \emptyset \}$
is a
 $\Sigma _2$
-computable set.
$\Sigma _2$
-computable set.
Proof of
 $(iv)$
: Assume that A is strongly attracting with neighborhood U. Since A is compact, there must exists a finite cover of A by ideal balls
$(iv)$
: Assume that A is strongly attracting with neighborhood U. Since A is compact, there must exists a finite cover of A by ideal balls
 $B_{n_{1}},\ldots , B_{n_{k}}$
such that
$B_{n_{1}},\ldots , B_{n_{k}}$
such that
 $$ \begin{align*} \mathcal{B}=\bigcup_{i=1}^{k}\overline{B}_{n_{i}} \subset U. \end{align*} $$
$$ \begin{align*} \mathcal{B}=\bigcup_{i=1}^{k}\overline{B}_{n_{i}} \subset U. \end{align*} $$
Since
 $\mathcal {B}$
is a computable closed set, it is, in particular, recursively compact. Note that
$\mathcal {B}$
is a computable closed set, it is, in particular, recursively compact. Note that
 $T^{n}\mathcal {B}$
is covered by some r.e. open set V if and only if
$T^{n}\mathcal {B}$
is covered by some r.e. open set V if and only if
 $\mathcal {B}$
is covered by
$\mathcal {B}$
is covered by
 $T^{-n}V$
, which is r.e. open since T is computable. It follows that
$T^{-n}V$
, which is r.e. open since T is computable. It follows that
 $T^{n}\mathcal {B}$
is recursively compact, uniformly in n. Moreover,
$T^{n}\mathcal {B}$
is recursively compact, uniformly in n. Moreover,
 $A=\bigcap _{n}T^{n}\mathcal {B}$
is covered by some r.e. open V if and only if some finite intersection is covered by V, which shows that A is recursively compact as well. By Proposition 2.5, A is therefore upper semi-computable, as required.
$A=\bigcap _{n}T^{n}\mathcal {B}$
is covered by some r.e. open V if and only if some finite intersection is covered by V, which shows that A is recursively compact as well. By Proposition 2.5, A is therefore upper semi-computable, as required.
Proof of
 $(v)$
: Assume that
$(v)$
: Assume that
 $A\subset X$
is a closed invariant set on which T is minimal. Let
$A\subset X$
is a closed invariant set on which T is minimal. Let
 $\tau $
be a computable surjection from
$\tau $
be a computable surjection from
 $\mathbb {N}$
to the finite subsets of
$\mathbb {N}$
to the finite subsets of
 $\mathbb {N}$
. Consider an ideal ball
$\mathbb {N}$
. Consider an ideal ball
 $B_i$
. From the minimality property, it follows that
$B_i$
. From the minimality property, it follows that
 $$ \begin{align*} B_i\cap A \neq \emptyset &\Longleftrightarrow\ A \subset \bigcup_{t\geq 0 } T^{-t}(B_i)\\ &\Longleftrightarrow \text{ there exists } k\in\mathbb{N}, \text{ for all } j\in\tau(k),\quad \overline{B_j}\cap A=\emptyset \\ &\qquad \text{and }\bigg(\bigcup_{j\in\tau(k)}B_j\bigg)\cup\bigg(\bigcup_{t\geq 0 } T^{-t}(B_i)\bigg)=X. \end{align*} $$
$$ \begin{align*} B_i\cap A \neq \emptyset &\Longleftrightarrow\ A \subset \bigcup_{t\geq 0 } T^{-t}(B_i)\\ &\Longleftrightarrow \text{ there exists } k\in\mathbb{N}, \text{ for all } j\in\tau(k),\quad \overline{B_j}\cap A=\emptyset \\ &\qquad \text{and }\bigg(\bigcup_{j\in\tau(k)}B_j\bigg)\cup\bigg(\bigcup_{t\geq 0 } T^{-t}(B_i)\bigg)=X. \end{align*} $$
Assume that A is
 $\Pi _n$
-computable with
$\Pi _n$
-computable with
 $n=1$
or
$n=1$
or
 $2.$
We deduce that it is
$2.$
We deduce that it is
 $\Sigma _n$
-computable to decide that
$\Sigma _n$
-computable to decide that
 $\overline {B_j}\cap A=\emptyset $
. Moreover, since T is computable, it is possible to enumerate ideal balls whose union is
$\overline {B_j}\cap A=\emptyset $
. Moreover, since T is computable, it is possible to enumerate ideal balls whose union is
 $\bigcup _{t\geq 0 } T^{-t}(B_i)$
. Using the fact that X is recursively compact, it is uniformly semi-decidable to know whether
$\bigcup _{t\geq 0 } T^{-t}(B_i)$
. Using the fact that X is recursively compact, it is uniformly semi-decidable to know whether
 $ (\bigcup _{j\in \tau (k)}B_j)\cup (\bigcup _{t\geq 0 } T^{-t}(B_i))=X.$
$ (\bigcup _{j\in \tau (k)}B_j)\cup (\bigcup _{t\geq 0 } T^{-t}(B_i))=X.$
We deduce that
 $\{i\in \mathbb {N}:B_i\cap A\ne \emptyset \}$
is a
$\{i\in \mathbb {N}:B_i\cap A\ne \emptyset \}$
is a
 $\Sigma _n$
-computable set.
$\Sigma _n$
-computable set.
Proof of
 $(vi)$
Finally, assume that T is open and exact on A. It follows that, for an ideal ball
$(vi)$
Finally, assume that T is open and exact on A. It follows that, for an ideal ball
 $B_i$
,
$B_i$
,
 $$ \begin{align*} B_i\cap A \neq \emptyset \iff A \subset \bigcup_{t}T^{t} (B_i). \end{align*} $$
$$ \begin{align*} B_i\cap A \neq \emptyset \iff A \subset \bigcup_{t}T^{t} (B_i). \end{align*} $$
Since T is effectively open, by hypothesis, the set
 $\bigcup _{t}T^{t}(B_i)$
is recursively open uniformly in i. The claim now follows exactly as in the previous case.
$\bigcup _{t}T^{t}(B_i)$
is recursively open uniformly in i. The claim now follows exactly as in the previous case.
4 Realizing complex attractors within symbolic systems
In this section, we present examples of computable systems on symbolic spaces exhibiting attractors whose algorithmic complexity matches the general upper bounds given by Theorem 3.1, showing that these bounds are tight in general.
4.1 Symbolic systems
Given a finite alphabet
 $\mathcal {A}$
, a word or pattern
$\mathcal {A}$
, a word or pattern
 $x_1x_2\cdots x_n$
is a finite sequence (possibly empty) of symbols from
$x_1x_2\cdots x_n$
is a finite sequence (possibly empty) of symbols from
 $\mathcal {A}$
. We denote by
$\mathcal {A}$
. We denote by
 $\mathcal {A}^{\ast }$
the set of words and by
$\mathcal {A}^{\ast }$
the set of words and by
 $\mathcal {A}^{+}$
the set of non-empty words. The length of a word
$\mathcal {A}^{+}$
the set of non-empty words. The length of a word
 $u\in \mathcal {A}^{\ast }$
will be denoted by
$u\in \mathcal {A}^{\ast }$
will be denoted by
 $|u|$
. A symbolic space is a set of the form
$|u|$
. A symbolic space is a set of the form
 $\mathcal {A}^{\mathbb {N}}$
, whose elements will be referred to as configurations. Given
$\mathcal {A}^{\mathbb {N}}$
, whose elements will be referred to as configurations. Given
 $i\leq j$
, the restriction of configuration
$i\leq j$
, the restriction of configuration
 $x\in \mathcal {A}^{\mathbb {N}}$
to
$x\in \mathcal {A}^{\mathbb {N}}$
to
 $[i,j]$
is defined to be the word
$[i,j]$
is defined to be the word
 $x_i\cdots x_j$
, and it is denoted by
$x_i\cdots x_j$
, and it is denoted by
 $x_{[i,j]}$
. We say that a word
$x_{[i,j]}$
. We say that a word
 $u\in \mathcal {A}^{\ast }$
appears at position
$u\in \mathcal {A}^{\ast }$
appears at position
 $i\in \mathbb {N}$
in a configuration
$i\in \mathbb {N}$
in a configuration
 $x\in \mathcal {A}^{\mathbb {N}}$
if
$x\in \mathcal {A}^{\mathbb {N}}$
if
 $x_{[i,i+|u|-1]}=u$
. Given
$x_{[i,i+|u|-1]}=u$
. Given
 $A\subset \mathcal {A}^{\mathbb {N}}$
, the language of A is the set of words that appear in some configuration of A. The cylinder centered on the word
$A\subset \mathcal {A}^{\mathbb {N}}$
, the language of A is the set of words that appear in some configuration of A. The cylinder centered on the word
 $u\in \mathcal {A}^{\ast }$
at the position
$u\in \mathcal {A}^{\ast }$
at the position
 $i\in \mathbb {N}$
is the set of configurations defined by
$i\in \mathbb {N}$
is the set of configurations defined by
 $$ \begin{align*}[u]_i=\{x\in\mathcal{A}^{\mathbb{N}}: u \text{ appears at position } i \text{ in } x \}.\end{align*} $$
$$ \begin{align*}[u]_i=\{x\in\mathcal{A}^{\mathbb{N}}: u \text{ appears at position } i \text{ in } x \}.\end{align*} $$
It is well known that
 $\mathcal {A}^{\mathbb {N}}$
is compact for the product topology (where
$\mathcal {A}^{\mathbb {N}}$
is compact for the product topology (where
 $\mathcal {A}$
is considered with the discrete topology) and that the cylinders form a basis of clopen sets. This is a computable space: the ideal points can be taken to be the set of all eventually constant configurations, and the distance is given by
$\mathcal {A}$
is considered with the discrete topology) and that the cylinders form a basis of clopen sets. This is a computable space: the ideal points can be taken to be the set of all eventually constant configurations, and the distance is given by
 $$ \begin{align*}d(x,y)=2^{-\min\{n\in\mathbb{N}:x_n\ne y_n\}}\quad\text{for all }x,y\in\mathcal{A}^{\mathbb{N}}.\end{align*} $$
$$ \begin{align*}d(x,y)=2^{-\min\{n\in\mathbb{N}:x_n\ne y_n\}}\quad\text{for all }x,y\in\mathcal{A}^{\mathbb{N}}.\end{align*} $$
According to the definition of computable maps,
 $T:\mathcal {A}^{\mathbb {N}}\longrightarrow \mathcal {A}^{\mathbb {N}}$
is computable if and only if there exist two computable functions
$T:\mathcal {A}^{\mathbb {N}}\longrightarrow \mathcal {A}^{\mathbb {N}}$
is computable if and only if there exist two computable functions
 $\alpha :\mathbb {N}\longrightarrow \mathbb {N}$
and
$\alpha :\mathbb {N}\longrightarrow \mathbb {N}$
and
 $\beta :\mathcal {A}^{\ast }\longrightarrow \mathcal {A}$
such that
$\beta :\mathcal {A}^{\ast }\longrightarrow \mathcal {A}$
such that
 $$ \begin{align*}T(x)_n=\beta(x_{[0,\alpha(n)]})\quad\text{for all } x\in\mathcal{A}^{\mathbb{N}} \text{ and } n\in\mathbb{N}.\end{align*} $$
$$ \begin{align*}T(x)_n=\beta(x_{[0,\alpha(n)]})\quad\text{for all } x\in\mathcal{A}^{\mathbb{N}} \text{ and } n\in\mathbb{N}.\end{align*} $$
A simple example of a computable map on
 $\mathcal {A}^{\mathbb {N}}$
is the shift map defined by
$\mathcal {A}^{\mathbb {N}}$
is the shift map defined by
 $$ \begin{align*}\begin{array}{ccccc} \sigma:&\mathcal{A}^{\mathbb{N}} & \!\!\!\longrightarrow\!\!\!\! &\mathcal{A}^{\mathbb{N}}&\\ &x&\!\!\!\longmapsto\!\!\! & \sigma(x),& \text{ where } \sigma(x)_i=x_{i+1}\text{ for all }i\in\mathbb{N}. \end{array}\end{align*} $$
$$ \begin{align*}\begin{array}{ccccc} \sigma:&\mathcal{A}^{\mathbb{N}} & \!\!\!\longrightarrow\!\!\!\! &\mathcal{A}^{\mathbb{N}}&\\ &x&\!\!\!\longmapsto\!\!\! & \sigma(x),& \text{ where } \sigma(x)_i=x_{i+1}\text{ for all }i\in\mathbb{N}. \end{array}\end{align*} $$
A closed shift-invariant subset of
 $\mathcal {A}^{\mathbb {N}}$
is called a subshift. Equivalently, a subshift can be defined by a list of forbidden patterns as the collection of all configurations in which no forbidden pattern appears. If a subshift A is defined by forbidden patterns that can be enumerated by a Turing machine, then A is
$\mathcal {A}^{\mathbb {N}}$
is called a subshift. Equivalently, a subshift can be defined by a list of forbidden patterns as the collection of all configurations in which no forbidden pattern appears. If a subshift A is defined by forbidden patterns that can be enumerated by a Turing machine, then A is
 $\Pi _1$
. If the forbidden patterns can be enumerated with the help of the halting problem, then A is
$\Pi _1$
. If the forbidden patterns can be enumerated with the help of the halting problem, then A is
 $\Pi _2$
.
$\Pi _2$
.
Given a symbol
 $a\in \{0,1\}$
, a block of size n for a is a finite word of the form
$a\in \{0,1\}$
, a block of size n for a is a finite word of the form
 $$ \begin{align*}b\underbrace{aaaa\cdots a}_{n}c,\end{align*} $$
$$ \begin{align*}b\underbrace{aaaa\cdots a}_{n}c,\end{align*} $$
where b and c are different from a. The position of the block in a configuration is the index of the letter b.
4.2 A
$\Pi _1$
-complete strong attractor

We present here an example of a computable system having a
 $\Pi _1$
-complete invariant set A, which is the unique attractor of the system in the strongest possible sense: topological, metric and statistical. Moreover, it is strongly attracting, and the dynamics it supports are highly non-trivial. Note that, by Theorem 3.1, such attractors must be at most
$\Pi _1$
-complete invariant set A, which is the unique attractor of the system in the strongest possible sense: topological, metric and statistical. Moreover, it is strongly attracting, and the dynamics it supports are highly non-trivial. Note that, by Theorem 3.1, such attractors must be at most
 $\Pi _1$
.
$\Pi _1$
.
Theorem 4.1. There exists a computable map
 $T: \{0,1\}^{\mathbb {N}}\to \{0,1\}^{\mathbb {N}} $
and an invariant closed subset
$T: \{0,1\}^{\mathbb {N}}\to \{0,1\}^{\mathbb {N}} $
and an invariant closed subset
 $A\subset X$
with the following properties.
$A\subset X$
with the following properties.
-
(i) A is
$\Pi _1$
-complete. -
(ii) A is the topological and metric attractor of T. Moreover, the dynamics of T on A are a topologically mixing shift of positive entropy.
-
(iii) A is strongly attracting, and its realm of attraction is, in fact, the whole space:
${\omega (x)\subset A}$
for all
$x\in X$
. -
(iv) A is the statistical attractor of X with respect to any reference measure
$\unicode{x3bb} $
that is shift ergodic and of full support. In particular, the unique physical measure of the system is non-computable.




Proof. Consider the set
 $$ \begin{align*}\mathcal{H}alt = \{i \in \mathbb{N} : M_{i} \text{ halts on the empty input}\}\end{align*} $$
$$ \begin{align*}\mathcal{H}alt = \{i \in \mathbb{N} : M_{i} \text{ halts on the empty input}\}\end{align*} $$
of indices of machines that halt on the empty input. It is well known that its complement
 $\overline {\mathcal {H}alt}$
is a
$\overline {\mathcal {H}alt}$
is a
 $\Pi _1$
-complete set.
$\Pi _1$
-complete set.
Definition of the system. Let
 $X=\{0,1\}^{\mathbb {N}}$
. Consider the subshift
$X=\{0,1\}^{\mathbb {N}}$
. Consider the subshift
 $A\subset X$
defined by the forbidden pattens of the form
$A\subset X$
defined by the forbidden pattens of the form
 $01^{n}0$
, where
$01^{n}0$
, where
 $n\in \mathcal {H}alt$
. More precisely, any element of A has the form
$n\in \mathcal {H}alt$
. More precisely, any element of A has the form
 $$ \begin{align*} 1^{*}0^{k_{1}}1^{n_{1}}0^{k_{2}}1^{n_{2}}\cdots 0^{k_{i}}1^{n_{i}} \cdots, \end{align*} $$
$$ \begin{align*} 1^{*}0^{k_{1}}1^{n_{1}}0^{k_{2}}1^{n_{2}}\cdots 0^{k_{i}}1^{n_{i}} \cdots, \end{align*} $$
where the
 $k_{i}$
are arbitrary and the
$k_{i}$
are arbitrary and the
 $n_{i}$
are such that machine
$n_{i}$
are such that machine
 $M_{n_{i}}$
does not halt on the empty input.
$M_{n_{i}}$
does not halt on the empty input.
We construct a computable function T over X for which A is a strong attractor on which T acts as the shift map. The idea to achieve this is simple: we want successive iterations of T to have, in the limit, the effect on a given input x of reading the blocks of
 $1$
’s, to erase those whose length is the index of a Turing machine that halts, and then make a shift. Now for the details.
$1$
’s, to erase those whose length is the index of a Turing machine that halts, and then make a shift. Now for the details.
The definition of T is as follows. Let
 $(M_{e})_{e\in \mathbb {N}}$
be an enumeration of all Turing machines. Let
$(M_{e})_{e\in \mathbb {N}}$
be an enumeration of all Turing machines. Let
 $x\in X$
. Then the ith bit of
$x\in X$
. Then the ith bit of
 $T(x)$
, denoted by
$T(x)$
, denoted by
 $T(x)_{i}$
, is given by the following.
$T(x)_{i}$
, is given by the following.
-
• If there exist
$j_1,j_2$
such that-
(i)
$j_{1}\leq i < j_{2} \leq 2i$
; -
(ii)
$x_{[j_{1},j_{2}]}=01^{l}0$
with
$l\leq j_{1}$
; and -
(iii)
$M_{l}$
halts on the empty input in at most
$j_{1}$
steps,
then
$T(x)_{i}=0$
. -
-
• Otherwise,
$T(x)_{i}=x_{i+1}$
.








In other words, first the function T erases in x any block of
 $1$
’s of length l if it is at a position
$1$
’s of length l if it is at a position
 $i\geq l$
and the machine
$i\geq l$
and the machine
 $M_{l}$
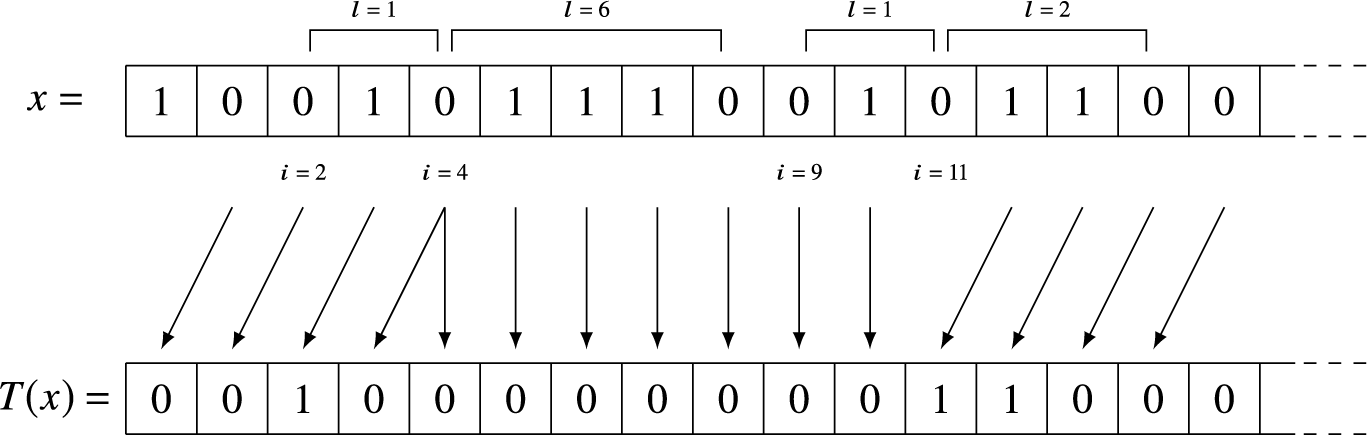
halts on the empty input in at most i steps, and then it shifts the configuration obtained. In particular, any block that is not deleted after the first iteration of T is shifted, and will keep being shifted in subsequent iterations until it disappears (see Figure 1 for an illustration).
$M_{l}$
halts on the empty input in at most i steps, and then it shifts the configuration obtained. In particular, any block that is not deleted after the first iteration of T is shifted, and will keep being shifted in subsequent iterations until it disappears (see Figure 1 for an illustration).
An illustration of the action of T on a configuration x. It is assumed that machines
 $M_1$
and
$M_1$
and
 $M_3$
halt in eight and four steps, respectively, whereas machine
$M_3$
halt in eight and four steps, respectively, whereas machine
 $M_2$
does not halt at all.
$M_2$
does not halt at all.
To see that A is
 $\Pi _1$
-complete set, we simply note that
$\Pi _1$
-complete set, we simply note that
 $$ \begin{align*}A\cap[01^n0]_0\ne\emptyset\Longleftrightarrow\ n\in \overline{\mathcal{H}alt}. \end{align*} $$
$$ \begin{align*}A\cap[01^n0]_0\ne\emptyset\Longleftrightarrow\ n\in \overline{\mathcal{H}alt}. \end{align*} $$
Properties of
 ${A}$
. It is clear that A is a topologically mixing subshift of positive entropy and that T acts on A as the shift. We start by showing that A is strongly attracting since, in fact, it attracts every orbit.
${A}$
. It is clear that A is a topologically mixing subshift of positive entropy and that T acts on A as the shift. We start by showing that A is strongly attracting since, in fact, it attracts every orbit.
Claim 1. One has
 $$ \begin{align*}A=\bigcap_{n\in\mathbb{N}}T^n(X);\end{align*} $$
$$ \begin{align*}A=\bigcap_{n\in\mathbb{N}}T^n(X);\end{align*} $$
in particular,
 $\omega (x)\subset A$
for all
$\omega (x)\subset A$
for all
 $x\in X$
.
$x\in X$
.
Proof. Since A is T-invariant, one immediately has
 $A\subset \bigcap _{n\in \mathbb {N}}T^n(X).$
Let
$A\subset \bigcap _{n\in \mathbb {N}}T^n(X).$
Let
 ${x\in \bigcap _{n\in \mathbb {N}}T^n(X)}$
and suppose that
${x\in \bigcap _{n\in \mathbb {N}}T^n(X)}$
and suppose that
 $x\notin A$
. Then, there exists
$x\notin A$
. Then, there exists
 $j\in \mathbb {N}$
such that
$j\in \mathbb {N}$
such that
 $x_{[j,j+l+1]}=01^l0$
and the machine
$x_{[j,j+l+1]}=01^l0$
and the machine
 $M_{l}$
halts on the empty input, say, in less than t steps. Pick
$M_{l}$
halts on the empty input, say, in less than t steps. Pick
 $n\in \mathbb {N}$
such that
$n\in \mathbb {N}$
such that
 $n+j\geq \max (t,l)$
. Then there exists
$n+j\geq \max (t,l)$
. Then there exists
 $y\in X$
for which
$y\in X$
for which
 $T^n(y)=x$
. Note that, if
$T^n(y)=x$
. Note that, if
 $T(z)$
has a block of
$T(z)$
has a block of
 $1$
’s at position i for a given z, then z must have a block of
$1$
’s at position i for a given z, then z must have a block of
 $1$
’s at position
$1$
’s at position
 $i+1$
. Therefore, since
$i+1$
. Therefore, since
 $x_{[j,j+l+1]}=01^l0$
, one must have
$x_{[j,j+l+1]}=01^l0$
, one must have
 $y_{[n+j,n+j+l+1]}=01^l0$
. However,
$y_{[n+j,n+j+l+1]}=01^l0$
. However,
 $T(y)_{[n+j-1,n+j+l]}=0^{l+2}$
since
$T(y)_{[n+j-1,n+j+l]}=0^{l+2}$
since
 $M_{l}$
halts on the empty input in less than t steps and
$M_{l}$
halts on the empty input in less than t steps and
 $n+j\geq \max (t,l)$
. We deduce that
$n+j\geq \max (t,l)$
. We deduce that
 $x_{[j,j+l+1]}=0^{l+2}$
, which is a contradiction.
$x_{[j,j+l+1]}=0^{l+2}$
, which is a contradiction.
We now show that A is the topological and metric attractor of T. We do this by showing that, for a full measure
 $G_{\delta }$
-dense set
$G_{\delta }$
-dense set
 $\Lambda $
of initial conditions, we have
$\Lambda $
of initial conditions, we have
 $\omega (x) = A$
, which implies that there cannot be a proper subset of A whose topological basin of attraction is not meager or of positive measure.
$\omega (x) = A$
, which implies that there cannot be a proper subset of A whose topological basin of attraction is not meager or of positive measure.
Define
 $\Lambda \subset X$
as the set of configurations on which any word in the language of A appears infinitely often. Clearly,
$\Lambda \subset X$
as the set of configurations on which any word in the language of A appears infinitely often. Clearly,
 $\Lambda $
is a
$\Lambda $
is a
 $G_{\delta }$
dense set, and by the ergodic theorem, it has full measure with respect to every shift-ergodic measure of full support.
$G_{\delta }$
dense set, and by the ergodic theorem, it has full measure with respect to every shift-ergodic measure of full support.
Claim 2. For every
 $x\in \Lambda $
, one has
$x\in \Lambda $
, one has
 $\omega (x)=A$
.
$\omega (x)=A$
.
Proof. Let x be a configuration in
 $\Lambda $
and let u be in the language of A. There exists v in the language of A that begins and ends with
$\Lambda $
and let u be in the language of A. There exists v in the language of A that begins and ends with
 $0$
and contains u as subword at the position k. By definition of
$0$
and contains u as subword at the position k. By definition of
 $\Lambda $
, there exists a strictly increasing sequence
$\Lambda $
, there exists a strictly increasing sequence
 $(i_n)_{n\in \mathbb {N}}$
such that
$(i_n)_{n\in \mathbb {N}}$
such that
 $x_{[i_n,i_n+|u|-1]}=v$
for all
$x_{[i_n,i_n+|u|-1]}=v$
for all
 $n\in \mathbb {N}$
. Since the word v is just shifted as a sequence of admissible blocks of
$n\in \mathbb {N}$
. Since the word v is just shifted as a sequence of admissible blocks of
 $1$
’s by the action of T, one deduces that
$1$
’s by the action of T, one deduces that
 $T^{i_n+k}(x)_{[0,|u|-1]}=u$
for all
$T^{i_n+k}(x)_{[0,|u|-1]}=u$
for all
 $n\in \mathbb {N}$
: that is,
$n\in \mathbb {N}$
: that is,
 ${\omega (x)\cap [u]_0\ne \emptyset }$
, so
${\omega (x)\cap [u]_0\ne \emptyset }$
, so
 $$ \begin{align*}A\subset\omega(x).\end{align*} $$
$$ \begin{align*}A\subset\omega(x).\end{align*} $$
The previous claim gives the opposite inclusion, and thus
 $\omega (x)=A$
for every
$\omega (x)=A$
for every
 $x\in \Lambda $
.
$x\in \Lambda $
.
It remains to show that A is also the statistical attractor of T. Let
 $\mu $
be a shift-ergodic measure with full support on X. For
$\mu $
be a shift-ergodic measure with full support on X. For
 $x\in X$
and
$x\in X$
and
 $n\in \mathbb {N}$
, we recall that
$n\in \mathbb {N}$
, we recall that
 $$ \begin{align*} \nu_{n}(x)=\frac{1}{n} \sum_{i<n} \delta_{T^{i}(x)}. \end{align*} $$
$$ \begin{align*} \nu_{n}(x)=\frac{1}{n} \sum_{i<n} \delta_{T^{i}(x)}. \end{align*} $$
Define
 $\phi :X\longrightarrow X$
such that
$\phi :X\longrightarrow X$
such that
 $\phi (x)_i\ne x_i$
if and only if there exist
$\phi (x)_i\ne x_i$
if and only if there exist
 $j_{1}< i < j_{2}$
such that
$j_{1}< i < j_{2}$
such that
 $x_{[j_{1},j_{2}]}=01^{l}0$
and the machine
$x_{[j_{1},j_{2}]}=01^{l}0$
and the machine
 $M_{l}$
halts on the empty input. In other words, the function
$M_{l}$
halts on the empty input. In other words, the function
 $\phi $
erases blocks of
$\phi $
erases blocks of
 $1$
’s whose length corresponds to Turing machines that halt. The function
$1$
’s whose length corresponds to Turing machines that halt. The function
 $\phi $
is continuous on
$\phi $
is continuous on
 $X\setminus \{w1^{\infty }:w\in \{0,1\}^{\ast }\}$
so it is measurable.
$X\setminus \{w1^{\infty }:w\in \{0,1\}^{\ast }\}$
so it is measurable.
The function
 $\phi $
is not shift invariant since, if the machine l halts on the empty input, one has
$\phi $
is not shift invariant since, if the machine l halts on the empty input, one has
 $\phi (\sigma (x))\ne \sigma (\phi (x))$
if
$\phi (\sigma (x))\ne \sigma (\phi (x))$
if
 $x_{[0,l+1]}=01^l0$
. However, if a word u starts with a
$x_{[0,l+1]}=01^l0$
. However, if a word u starts with a
 $01^l0$
where the machine l does not halt on the empty input, then
$01^l0$
where the machine l does not halt on the empty input, then
 $\phi ^{-1}([u]_n)$
can be written as an union of cylinders that begin at position n. Indeed, the word
$\phi ^{-1}([u]_n)$
can be written as an union of cylinders that begin at position n. Indeed, the word
 $01^l0$
must appear at the position n in the preimage of
$01^l0$
must appear at the position n in the preimage of
 $[u]_n$
and there is no influence between the cells before this word. Thus
$[u]_n$
and there is no influence between the cells before this word. Thus
 $\sigma ^{-k}\phi ^{-1}([u]_n)=\phi ^{-1}([u]_{n+k})$
for
$\sigma ^{-k}\phi ^{-1}([u]_n)=\phi ^{-1}([u]_{n+k})$
for
 $k\geq 0$
. By
$k\geq 0$
. By
 $\sigma $
-invariance of
$\sigma $
-invariance of
 $\mu $
, one has
$\mu $
, one has
 $$ \begin{align*}\phi\mu([u]_n)=\phi\mu([u]_{n+k})=\sigma^k\phi\mu([u]_n).\end{align*} $$
$$ \begin{align*}\phi\mu([u]_n)=\phi\mu([u]_{n+k})=\sigma^k\phi\mu([u]_n).\end{align*} $$
If u does not begin with the block
 $01^l0$
, denote by
$01^l0$
, denote by
 $B_i^j$
the set of configurations that have at least one occurrence of
$B_i^j$
the set of configurations that have at least one occurrence of
 $01^l0$
between the coordinates i and j. For
$01^l0$
between the coordinates i and j. For
 $k\geq 0$
, one has
$k\geq 0$
, one has
 $$ \begin{align*}\sigma^{-k}\phi^{-1}([u]_n\cap B_0^n)=\phi^{-1}([u]_{n+k}\cap B_{k}^{n+k}),\end{align*} $$
$$ \begin{align*}\sigma^{-k}\phi^{-1}([u]_n\cap B_0^n)=\phi^{-1}([u]_{n+k}\cap B_{k}^{n+k}),\end{align*} $$
so
 $$ \begin{align*}\phi\mu([u]_n\cap B_0^n)=\sigma^{k}\phi\mu([u]_{n}\cap B_{0}^{n}).\end{align*} $$
$$ \begin{align*}\phi\mu([u]_n\cap B_0^n)=\sigma^{k}\phi\mu([u]_{n}\cap B_{0}^{n}).\end{align*} $$
Since
 $$ \begin{align*} \phi\mu (B_{0}^{n})\geq\mu(B_0^n)\underset{n\to\infty}{\longrightarrow}1 \text{ and }\phi\mu (B_{k}^{n+k})\geq\mu(B_k^{n+k})=\mu(B_0^n), \end{align*} $$
$$ \begin{align*} \phi\mu (B_{0}^{n})\geq\mu(B_0^n)\underset{n\to\infty}{\longrightarrow}1 \text{ and }\phi\mu (B_{k}^{n+k})\geq\mu(B_k^{n+k})=\mu(B_0^n), \end{align*} $$
for all
 $\epsilon>0$
there exists
$\epsilon>0$
there exists
 $n\in \mathbb {N}$
such that
$n\in \mathbb {N}$
such that
 $1-\phi \mu (B_{0}^{n})<\epsilon $
. Thus, for any
$1-\phi \mu (B_{0}^{n})<\epsilon $
. Thus, for any
 $k\in \mathbb {N}$
, one has
$k\in \mathbb {N}$
, one has
 $$ \begin{align*} |\sigma^{n+k}\phi\mu([u]_0)-\sigma^{n}\phi\mu([u]_0)|&=|\phi\mu([u]_{n+k})-\phi\mu([u]_n)|\\ &\leq |\phi\mu([u]_{n+k})-\phi\mu([u]_{n+k}\cap B_k^{n+k})|\\ & \quad+ |\phi\mu([u]_{n+k}\cap B_k^{n+k})-\phi\mu([u]_n\cap B_0^{n})|\\ & \quad+ |\phi\mu([u]_n\cap B_0^{n})-\phi\mu([u]_n)|\\ &\leq 2\epsilon. \end{align*} $$
$$ \begin{align*} |\sigma^{n+k}\phi\mu([u]_0)-\sigma^{n}\phi\mu([u]_0)|&=|\phi\mu([u]_{n+k})-\phi\mu([u]_n)|\\ &\leq |\phi\mu([u]_{n+k})-\phi\mu([u]_{n+k}\cap B_k^{n+k})|\\ & \quad+ |\phi\mu([u]_{n+k}\cap B_k^{n+k})-\phi\mu([u]_n\cap B_0^{n})|\\ & \quad+ |\phi\mu([u]_n\cap B_0^{n})-\phi\mu([u]_n)|\\ &\leq 2\epsilon. \end{align*} $$
It follows that the sequence
 $(\sigma ^n\phi \mu )_{n\in \mathbb {N}}$
converges towards a measure denoted by
$(\sigma ^n\phi \mu )_{n\in \mathbb {N}}$
converges towards a measure denoted by
 $\tilde {\mu }$
. Moreover, if
$\tilde {\mu }$
. Moreover, if
 $\mu $
has full support, then the support of
$\mu $
has full support, then the support of
 $\tilde {\mu }$
is A.
$\tilde {\mu }$
is A.
Claim 3. Let
 $\mu $
be a shift-ergodic probability measure of full support on X. Then
$\mu $
be a shift-ergodic probability measure of full support on X. Then
 $$ \begin{align*}\nu_{n}(x)\underset{n\to\infty}{\longrightarrow}\tilde{\mu}\textrm{ for } \mu\text{-almost every point } x.\end{align*} $$
$$ \begin{align*}\nu_{n}(x)\underset{n\to\infty}{\longrightarrow}\tilde{\mu}\textrm{ for } \mu\text{-almost every point } x.\end{align*} $$
Proof. Let
 $\epsilon>0$
and
$\epsilon>0$
and
 $u\in \{0,1\}^{\ast }$
. Consider a number l of a Turing machine that does not halt on the empty input.
$u\in \{0,1\}^{\ast }$
. Consider a number l of a Turing machine that does not halt on the empty input.
The set
 $\bigcup _{k\in \mathbb {N}}\sigma ^{-k}([01^l0]_0)$
is
$\bigcup _{k\in \mathbb {N}}\sigma ^{-k}([01^l0]_0)$
is
 $\sigma $
-invariant. Since
$\sigma $
-invariant. Since
 $\mu $
is
$\mu $
is
 $\sigma $
-ergodic and has full support, this set has measure one so there exists K such that
$\sigma $
-ergodic and has full support, this set has measure one so there exists K such that
 $$ \begin{align*}\mu\bigg(\bigcup^K_{k=0}\sigma^{-k}([01^l0]_0)\bigg)\geq 1-\frac{\epsilon}{2}.\end{align*} $$
$$ \begin{align*}\mu\bigg(\bigcup^K_{k=0}\sigma^{-k}([01^l0]_0)\bigg)\geq 1-\frac{\epsilon}{2}.\end{align*} $$
Consider
 $$ \begin{align*}B=\bigg(\bigcup_{k=0}^K\sigma^{-k}([01^l0]_0)\bigg) \cap \sigma^{-(|u|+K+l+1)}\bigg(\bigcup_{k=0}^K\sigma^{-k}([01^l0]_0)\bigg).\end{align*} $$
$$ \begin{align*}B=\bigg(\bigcup_{k=0}^K\sigma^{-k}([01^l0]_0)\bigg) \cap \sigma^{-(|u|+K+l+1)}\bigg(\bigcup_{k=0}^K\sigma^{-k}([01^l0]_0)\bigg).\end{align*} $$
One has
 $\mu (B)\geq 1-\epsilon $
. For
$\mu (B)\geq 1-\epsilon $
. For
 $n\geq K+l+1$
, consider
$n\geq K+l+1$
, consider
 $x\in \sigma ^{-n+K+l+1}(B)$
. There exists
$x\in \sigma ^{-n+K+l+1}(B)$
. There exists
 $j_1,j_2\in \mathbb {N}$
such that
$j_1,j_2\in \mathbb {N}$
such that
 $$ \begin{align*}n-K-l-1\leq j_1\leq j_1+l+1< n\leq n+|u|-1\leq j_2\leq n+|u|+K\end{align*} $$
$$ \begin{align*}n-K-l-1\leq j_1\leq j_1+l+1< n\leq n+|u|-1\leq j_2\leq n+|u|+K\end{align*} $$
 $$ \begin{align*}\text{ and }x_{[j_1,j_1+l+1]}=x_{[j_2,j_2+l+1]}=01^l0.\end{align*} $$
$$ \begin{align*}\text{ and }x_{[j_1,j_1+l+1]}=x_{[j_2,j_2+l+1]}=01^l0.\end{align*} $$
Let t be the biggest halting time obtained by considering Turing machine
 $M_{l'}$
with
$M_{l'}$
with
 $l'\leq 2K+l+1+|u|$
. If n also satisfies
$l'\leq 2K+l+1+|u|$
. If n also satisfies
 $n\geq \max (t,K+l+1)$
, we have that all blocks of
$n\geq \max (t,K+l+1)$
, we have that all blocks of
 $1$
’s contained in
$1$
’s contained in
 $x_{[j_1,j_2+l+1]}$
have length less than
$x_{[j_1,j_2+l+1]}$
have length less than
 $2K+l+1+|u|$
, so they are erased by the iteration of T if the corresponding Turing machines halt, since the position
$2K+l+1+|u|$
, so they are erased by the iteration of T if the corresponding Turing machines halt, since the position
 $j_1$
is larger than t. It follows that
$j_1$
is larger than t. It follows that
 $$ \begin{align*}T^n(x)_{[0,|u|-1]}=\phi(x)_{[n,n+|u|-1]}.\end{align*} $$
$$ \begin{align*}T^n(x)_{[0,|u|-1]}=\phi(x)_{[n,n+|u|-1]}.\end{align*} $$
Thus, for all
 $x\in X$
and for
$x\in X$
and for
 $n\geq \max (t,K+l+1)$
, one has
$n\geq \max (t,K+l+1)$
, one has
 $$ \begin{align*}|\delta_{T^n(x)}[u]-\mathbf{1}_{[u]}(\sigma^n\phi(x))|\leq1-\mathbf{1}_{\sigma^{-n+K+l+1}(B)}(x)\end{align*} $$
$$ \begin{align*}|\delta_{T^n(x)}[u]-\mathbf{1}_{[u]}(\sigma^n\phi(x))|\leq1-\mathbf{1}_{\sigma^{-n+K+l+1}(B)}(x)\end{align*} $$
so that
 $$ \begin{align*}\bigg|\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[u]-\frac{1}{N}\sum_{n=0}^N\mathbf{1}_{[u]}(\sigma^n(\phi(x)))\bigg|\leq1-\frac{1}{N-K}\sum_{n=K}^N\mathbf{1}_{\sigma^{-n+K+l+1}(B)}(x),\end{align*} $$
$$ \begin{align*}\bigg|\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[u]-\frac{1}{N}\sum_{n=0}^N\mathbf{1}_{[u]}(\sigma^n(\phi(x)))\bigg|\leq1-\frac{1}{N-K}\sum_{n=K}^N\mathbf{1}_{\sigma^{-n+K+l+1}(B)}(x),\end{align*} $$
where the last quantity converges to
 $1-\mu (B)=\epsilon $
as
$1-\mu (B)=\epsilon $
as
 $N\to \infty $
for
$N\to \infty $
for
 $\mu $
-almost every x. We conclude that, for
$\mu $
-almost every x. We conclude that, for
 $\mu $
-almost every x, one has
$\mu $
-almost every x, one has
 $$ \begin{align*}\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[u]\underset{N\to\infty}{\longrightarrow}\tilde{\mu}[u].\\[-42pt]\end{align*} $$
$$ \begin{align*}\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[u]\underset{N\to\infty}{\longrightarrow}\tilde{\mu}[u].\\[-42pt]\end{align*} $$
Since A is the support of
 $\tilde {\mu }$
, it follows that it is indeed the statistical attractor of T.
$\tilde {\mu }$
, it follows that it is indeed the statistical attractor of T.
4.3
$\Pi _{2}$
-complete wild attractors

In this section, we provide two kinds of examples. First, we construct an example of a system with a
 $\Pi _{2}$
-complete invariant set A that is the unique attractor in both the topological and metric sense. Note that, according to the upper bounds of §3, this attractor cannot be strictly attracting nor can it be a statistical attractor. It is known that the topological and metric attractors of a system do not need to coincide. When they are different, they are sometimes called wild attractors [Reference Bruin, Keller, Nowicki and van Strien11, Reference Milnor27]. As a second kind of example, we adapt our construction to show that computable systems can have wild attractors for which, in addition of being different as sets, their computational descriptions have extremely different complexity.
$\Pi _{2}$
-complete invariant set A that is the unique attractor in both the topological and metric sense. Note that, according to the upper bounds of §3, this attractor cannot be strictly attracting nor can it be a statistical attractor. It is known that the topological and metric attractors of a system do not need to coincide. When they are different, they are sometimes called wild attractors [Reference Bruin, Keller, Nowicki and van Strien11, Reference Milnor27]. As a second kind of example, we adapt our construction to show that computable systems can have wild attractors for which, in addition of being different as sets, their computational descriptions have extremely different complexity.
Theorem 4.2. There exists a computable map
 $T:X\to X$
with a
$T:X\to X$
with a
 $\Pi _{2}$
-complete invariant subset A that is the unique attractor of T in both the topological and metric sense. The reference measure for the latter can be taken to be any shift-ergodic measure of full support.
$\Pi _{2}$
-complete invariant subset A that is the unique attractor of T in both the topological and metric sense. The reference measure for the latter can be taken to be any shift-ergodic measure of full support.
Proof. Consider the set
 $$ \begin{align*}\mathcal{T}ot = \{i \in \mathbb{N} : M_{i} \text{ is total}\}\end{align*} $$
$$ \begin{align*}\mathcal{T}ot = \{i \in \mathbb{N} : M_{i} \text{ is total}\}\end{align*} $$
of indices of machines that halt on every input. It is well known that this is a
 $\Pi _{2}$
-complete set [Reference Rogers32].
$\Pi _{2}$
-complete set [Reference Rogers32].
Let
 $A\subset \{0,1\}^{\mathbb {N}}$
be the set of configurations that contains the configuration
$A\subset \{0,1\}^{\mathbb {N}}$
be the set of configurations that contains the configuration
 $0^\infty $
, or this configuration with at most one block of the form
$0^\infty $
, or this configuration with at most one block of the form
 $01^i0$
with
$01^i0$
with
 $i\in \mathcal {T}ot$
or configurations that begin with the symbol
$i\in \mathcal {T}ot$
or configurations that begin with the symbol
 $1$
and can have at most one change to give
$1$
and can have at most one change to give
 $0$
after. In particular A is a countable subshift and it is
$0$
after. In particular A is a countable subshift and it is
 $\Pi _{2}$
-complete since
$\Pi _{2}$
-complete since
 $$ \begin{align*}[01^{i}0]_0\cap A\ne\emptyset \iff i \in \mathcal{T}ot. \end{align*} $$
$$ \begin{align*}[01^{i}0]_0\cap A\ne\emptyset \iff i \in \mathcal{T}ot. \end{align*} $$
Let
 $X=\{0,1,S\}^{\mathbb {N}}$
and let
$X=\{0,1,S\}^{\mathbb {N}}$
and let
 $\mu $
be a shift-ergodic probability measure of full support. We describe a computable map
$\mu $
be a shift-ergodic probability measure of full support. We describe a computable map
 $T: X \to X$
that has A as the unique topological and metric attractor on which T acts as the shift. The idea is that given a configuration
$T: X \to X$
that has A as the unique topological and metric attractor on which T acts as the shift. The idea is that given a configuration
 $x=u_0Su_1Su_2Su_3\cdots $
, where
$x=u_0Su_1Su_2Su_3\cdots $
, where
 $u_i\in \{0,1\}^*$
and the symbol S appears at positions
$u_i\in \{0,1\}^*$
and the symbol S appears at positions
 $(i_n)_{n\in \mathbb {N}}$
, the computation of
$(i_n)_{n\in \mathbb {N}}$
, the computation of
 $T(x)$
is carried on according to the following steps.
$T(x)$
is carried on according to the following steps.
-
(1)
$u_0$
is shifted to the left. -
(2) The first S travels to the right at speed one, that is, it moves to right one position at each iteration of T. While
$u_0$
contains
$1\text{'}\mathrm{s}$
, S pushes to the right
$u_1$
together with the rest of the sequence, adding
$0\text{'}\mathrm{s}$
to its left to fill the positions that otherwise would have been left with no symbols assigned. If there are no
$1\text{'}\mathrm{s}$
in
$u_0$
, then S copies to its left, symbol by symbol, the entire first block of
$1\text{'}\mathrm{s}$
in
$u_1$
, if any, adding a
$0$
at the end of
$u_0$
in order to have a valid configuration (all positions with some symbol assigned). In other words, S pushes everything to the right until there are only
$0\text{'}\mathrm{s}$
to its left, and then allows the first block of
$1\text{'}\mathrm{s}$
on its right to cross, one symbol at a time. Once the entire block has crossed, it then pushes everything to the right again until the block that has just crossed (which is now being shifted to the left) disappears. It then continues in this same manner. -
(3) For the kth symbol S with
$k\geq 2$
, we search all blocks of
$1$
’s in the first
$i_k$
bits of
$u_k$
such that the corresponding Turing machines halt on any input of size less than k in at most
$i_k$
steps. All of these blocks are placed at once on the left of this symbol S, so that S ‘jumps’ to the right of these blocks and ‘pushes’ the others.


















The function T is clearly computable. Moreover, given a configuration x, all symbols S in x are shifted to the right by at least one position when T is applied.
Let
 $G\subset X$
be the set of configurations that contain infinitely many symbols S and infinitely many blocks of
$G\subset X$
be the set of configurations that contain infinitely many symbols S and infinitely many blocks of
 $1$
’s of all lengths. Clearly, G is a
$1$
’s of all lengths. Clearly, G is a
 $G_{\delta }$
set of measure one. We now show that
$G_{\delta }$
set of measure one. We now show that
 $\omega (x)=A$
for all
$\omega (x)=A$
for all
 $x\in G$
.
$x\in G$
.
Consider
 $x\in G$
. Since the first S is shifted to the right and a block of
$x\in G$
. Since the first S is shifted to the right and a block of
 $1$
’s crosses the first S only if there is no symbol
$1$
’s crosses the first S only if there is no symbol
 $1$
before, it follows that
$1$
before, it follows that
 $\omega (x)$
is contained in the subset of X that contains at most one block of
$\omega (x)$
is contained in the subset of X that contains at most one block of
 $1$
’s. Moreover, T acts as the shift on
$1$
’s. Moreover, T acts as the shift on
 $\omega (x)$
.
$\omega (x)$
.
Let
 $l\not \in \mathcal {T}ot$
. There exists
$l\not \in \mathcal {T}ot$
. There exists
 $k\in \mathbb {N}$
such that the Turing machine
$k\in \mathbb {N}$
such that the Turing machine
 $M_l$
does not halt on an input of size k. Thus, the kth symbol S of x cannot be crossed by a block of
$M_l$
does not halt on an input of size k. Thus, the kth symbol S of x cannot be crossed by a block of
 $1$
’s of size l. It follows that the orbit of x can intersect the cylinder
$1$
’s of size l. It follows that the orbit of x can intersect the cylinder
 $[01^l0]$
only finitely many times.
$[01^l0]$
only finitely many times.
Let
 $l\in \mathcal {T}ot$
. For
$l\in \mathcal {T}ot$
. For
 $k\in \mathbb {N}$
, denote by
$k\in \mathbb {N}$
, denote by
 $t_k$
the maximum halting time of
$t_k$
the maximum halting time of
 $M_l$
over all inputs of size less than k. Now consider a block of
$M_l$
over all inputs of size less than k. Now consider a block of
 $1$
’s of size l that is preceded by k symbols S. Since the length of the word between this block and the kth symbol S can only decrease, and since all symbols S are shifted to the right, there exists an iteration of T such that the kth symbol S is in a position
$1$
’s of size l that is preceded by k symbols S. Since the length of the word between this block and the kth symbol S can only decrease, and since all symbols S are shifted to the right, there exists an iteration of T such that the kth symbol S is in a position
 $i\geq t_k$
such that the distance between the symbol S and the end of the block of
$i\geq t_k$
such that the distance between the symbol S and the end of the block of
 $1$
’s is less than i. At this point, the block can cross this symbol S and go in a similar way through the remaining
$1$
’s is less than i. At this point, the block can cross this symbol S and go in a similar way through the remaining
 $k-1$
symbols S. Thus, the block
$k-1$
symbols S. Thus, the block
 $[01^l0]$
reaches position
$[01^l0]$
reaches position
 $0$
and then disappears infinitely many times, so that
$0$
and then disappears infinitely many times, so that
 $\omega (x)\cap [01^l0]\neq \emptyset $
. It follows that
$\omega (x)\cap [01^l0]\neq \emptyset $
. It follows that
 $\omega (x)=A$
.
$\omega (x)=A$
.
It is possible to modify the previous construction realize maps where the topological and metric attractors have completely different complexity.
Theorem 4.3. There exists computable maps
 $T':X\longrightarrow X$
and
$T':X\longrightarrow X$
and
 $T":X\longrightarrow X$
such that:
$T":X\longrightarrow X$
such that:
-
•
$T'$
has a computable metric attractor and a
$\Pi _2$
-complete topological attractor; and -
•
$T"$
has a
$\Pi _2$
-complete metric attractor and a computable topological attractor.




Proof. Consider
 $X_1=\{0,1,S\}^{\mathbb {N}}$
and
$X_1=\{0,1,S\}^{\mathbb {N}}$
and
 $X_2=\mathcal {A}^{\mathbb {N}}$
, where
$X_2=\mathcal {A}^{\mathbb {N}}$
, where
 $\mathcal {A}=\{a,b\}$
. Define
$\mathcal {A}=\{a,b\}$
. Define
 $X=X_1\times X_2$
and let
$X=X_1\times X_2$
and let
 $\unicode{x3bb} $
be the uniform Bernoulli measure on X. For a sequence
$\unicode{x3bb} $
be the uniform Bernoulli measure on X. For a sequence
 $x\in X$
, we refer to the symbols in
$x\in X$
, we refer to the symbols in
 $X_1$
and
$X_1$
and
 $X_2$
as in the first and second layers, respectively.
$X_2$
as in the first and second layers, respectively.
For
 $t\in \mathbb {N}$
, on the space X, consider the dense open set
$t\in \mathbb {N}$
, on the space X, consider the dense open set
 $U_t$
defined by
$U_t$
defined by

One has
 $$ \begin{align*}\unicode{x3bb}(U_{s,t})\leq\frac{1}{3}\times\bigg(\frac{2}{3}\bigg)^{s-1}\times\sum_{t'\geq t}\bigg(\frac{1}{2}\bigg)^{t'+s} =\bigg(\frac{2}{3}\bigg)^s\times\frac{1}{2^{t+s}}=\frac{1}{3^s}\times\frac{1}{2^{t}}.\end{align*} $$
$$ \begin{align*}\unicode{x3bb}(U_{s,t})\leq\frac{1}{3}\times\bigg(\frac{2}{3}\bigg)^{s-1}\times\sum_{t'\geq t}\bigg(\frac{1}{2}\bigg)^{t'+s} =\bigg(\frac{2}{3}\bigg)^s\times\frac{1}{2^{t+s}}=\frac{1}{3^s}\times\frac{1}{2^{t}}.\end{align*} $$
So
 $\unicode{x3bb} (U_t)\leq ({3}/{2^{t+1}})$
and, clearly,
$\unicode{x3bb} (U_t)\leq ({3}/{2^{t+1}})$
and, clearly,
 $G'=\bigcap _{K\in \mathbb {N}}\bigcup _{t\geq K}U_{t }$
is a dense
$G'=\bigcap _{K\in \mathbb {N}}\bigcup _{t\geq K}U_{t }$
is a dense
 $G_\delta $
of measure
$G_\delta $
of measure
 $0$
.
$0$
.
Consider
 $T':X\longrightarrow X$
to be the computable map such that
$T':X\longrightarrow X$
to be the computable map such that
 $T'$
acts on
$T'$
acts on
 $X_2$
as the shift and acts on
$X_2$
as the shift and acts on
 $X_1$
as the function defined in Theorem 4.2 except for the first S: a block of
$X_1$
as the function defined in Theorem 4.2 except for the first S: a block of
 $1\text{'}s$
in the first layer can cross the first S at position i only if either the word
$1\text{'}s$
in the first layer can cross the first S at position i only if either the word
 $a^{2i}$
appears on the second layer at position i or the word
$a^{2i}$
appears on the second layer at position i or the word
 $a^{2i+1}$
appears on the second layer at the position
$a^{2i+1}$
appears on the second layer at the position
 $i+1$
.
$i+1$
.
Since the first S travels to the right at speed one, if at time 0 it is at position s in the initial configuration, at time t it will be at position
 $s+t$
. Thus, this first S meets the word
$s+t$
. Thus, this first S meets the word
 $a^{2(t+s)}$
(respectively,
$a^{2(t+s)}$
(respectively,
 $a^{2(t+s)+1}$
) at time t at position position
$a^{2(t+s)+1}$
) at time t at position position
 $t+s$
(respectively,
$t+s$
(respectively,
 $t+s+1$
) exactly when this word is initially at position
$t+s+1$
) exactly when this word is initially at position
 $2t+s$
(respectively,
$2t+s$
(respectively,
 $2t+s+1$
) in x. In other words, when
$2t+s+1$
) in x. In other words, when
 $x\in U_{s,2t+s}$
(respectively,
$x\in U_{s,2t+s}$
(respectively,
 $x\in U_{s,2t+s+1})$
. See Figure 2 for an illustration.
$x\in U_{s,2t+s+1})$
. See Figure 2 for an illustration.
An illustration of the action of
 $T'$
on a configuration x following that it belongs to
$T'$
on a configuration x following that it belongs to
 $U_{s,s+2t}$
or
$U_{s,s+2t}$
or
 $U_{s,s+2t+1}$
. The red rectangle corresponds to the word
$U_{s,s+2t+1}$
. The red rectangle corresponds to the word
 $a^{s+2t}$
and the blue rectangle to the word
$a^{s+2t}$
and the blue rectangle to the word
 $a^{s+2t+1}$
following that x is
$a^{s+2t+1}$
following that x is
 $U_{s,s+2t}$
or
$U_{s,s+2t}$
or
 $U_{s,s+2t+1}$
.
$U_{s,s+2t+1}$
.
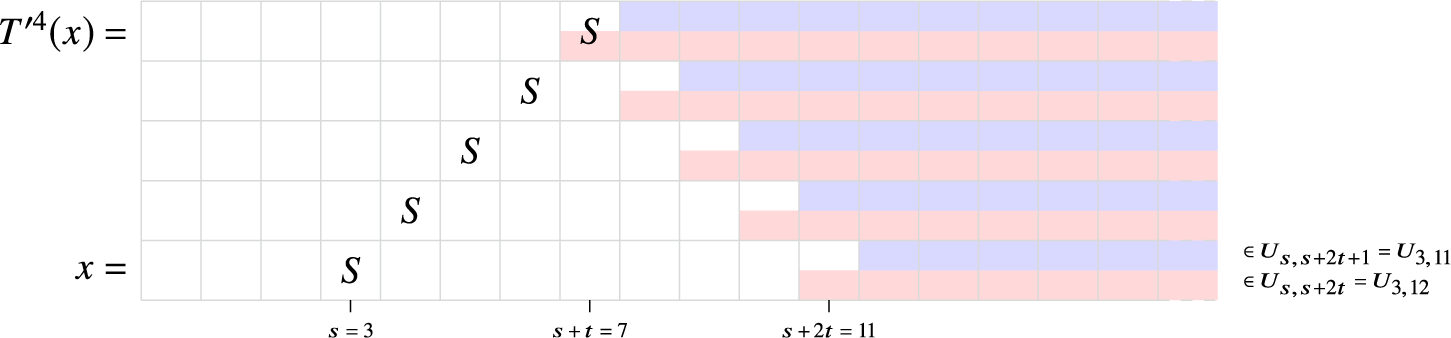
It follows that the first S of a configuration x allows a block of
 $1\text{'}s$
to cross it infinitely often if and only if there exist
$1\text{'}s$
to cross it infinitely often if and only if there exist
 $s\in \mathbb {N}$
and a strictly increasing sequence
$s\in \mathbb {N}$
and a strictly increasing sequence
 $(t_i)_i\in \mathbb {N}$
such that
$(t_i)_i\in \mathbb {N}$
such that
 $x\in U_{s,t_i}$
for all
$x\in U_{s,t_i}$
for all
 $i\in \mathbb {N}$
: that is, exactly when
$i\in \mathbb {N}$
: that is, exactly when
 $x\in G'$
.
$x\in G'$
.
Now, let
 $G\subset G'$
be the dense
$G\subset G'$
be the dense
 $G_\delta $
set of measure
$G_\delta $
set of measure
 $0$
made from configurations of
$0$
made from configurations of
 $G'$
for which the first layer contains an infinity of S and an infinity of blocks of
$G'$
for which the first layer contains an infinity of S and an infinity of blocks of
 $1\text{'}s$
of all sizes. For a configuration
$1\text{'}s$
of all sizes. For a configuration
 $x\in G$
, the first S is crossed infinitely often by blocks of
$x\in G$
, the first S is crossed infinitely often by blocks of
 $1\text{'}s$
. Thus, following the proof of Theorem 4.2,
$1\text{'}s$
. Thus, following the proof of Theorem 4.2,
 $\omega (x)=A\times \{a,b\}^{\mathbb {N}}$
, where A is the attractor of the function defined in the previous theorem. It follows that
$\omega (x)=A\times \{a,b\}^{\mathbb {N}}$
, where A is the attractor of the function defined in the previous theorem. It follows that
 $A\times \{a,b\}^{\mathbb {N}}$
is the topological attractor of
$A\times \{a,b\}^{\mathbb {N}}$
is the topological attractor of
 $T'$
. Now, if
$T'$
. Now, if
 $x\notin G'$
, there is only a finite number of blocks of
$x\notin G'$
, there is only a finite number of blocks of
 $1\text{'}s$
that can cross the first S, so almost surely
$1\text{'}s$
that can cross the first S, so almost surely
 $\omega (x)=\{0^{\infty }\}\times \{a,b\}^{\mathbb {N}}$
, which is therefore the metric attractor of
$\omega (x)=\{0^{\infty }\}\times \{a,b\}^{\mathbb {N}}$
, which is therefore the metric attractor of
 $T'$
. This proves the first bullet point of the corollary.
$T'$
. This proves the first bullet point of the corollary.
Now consider
 $T":X\longrightarrow X$
defined as follows. It acts on
$T":X\longrightarrow X$
defined as follows. It acts on
 $X_2$
as the shift and acts on
$X_2$
as the shift and acts on
 $X_1$
as the function defined in the proof of Theorem 4.2, with the following modifications. The second S in a configuration x will now behave as in T, but, in addition, it will check whether the first S satisfies one of the following conditions: if i is the position of the first S, then either the word
$X_1$
as the function defined in the proof of Theorem 4.2, with the following modifications. The second S in a configuration x will now behave as in T, but, in addition, it will check whether the first S satisfies one of the following conditions: if i is the position of the first S, then either the word
 $a^{2i}$
appears in the second layer at position i or
$a^{2i}$
appears in the second layer at position i or
 $a^{2i+1}$
appears in the second layer at position
$a^{2i+1}$
appears in the second layer at position
 $i+1$
. In this case, the function
$i+1$
. In this case, the function
 $T"$
inserts, starting at the position where the second S is located, the concatenation of the first i blocks of
$T"$
inserts, starting at the position where the second S is located, the concatenation of the first i blocks of
 $1\text{'}s$
(in lexicographic order), pushing to the right the rest of the configuration (including the second S) as many positions as needed in order to fit the inserted word.
$1\text{'}s$
(in lexicographic order), pushing to the right the rest of the configuration (including the second S) as many positions as needed in order to fit the inserted word.
Now, observe that, for almost all
 $x\in X$
, the conditions that the second S check can be verified only finitely many times. Thus,
$x\in X$
, the conditions that the second S check can be verified only finitely many times. Thus,
 $\omega (x)=A\times X_2$
for almost every
$\omega (x)=A\times X_2$
for almost every
 $x\in X$
, which makes
$x\in X$
, which makes
 $A\times X_2$
the metric attractor of
$A\times X_2$
the metric attractor of
 $T"$
.
$T"$
.
On the other hand, for
 $x\in G'\subset X$
, every block of
$x\in G'\subset X$
, every block of
 $1'$
s will appear to the left of the second S infinitely many times. Thus,
$1'$
s will appear to the left of the second S infinitely many times. Thus,
 $\omega (x)=A'\times X_2$
, where
$\omega (x)=A'\times X_2$
, where
 $A'\subset \{0,1\}^{\mathbb {N}}$
is the set of configurations that contain at most one block of the form
$A'\subset \{0,1\}^{\mathbb {N}}$
is the set of configurations that contain at most one block of the form
 $01^i0$
with
$01^i0$
with
 $i\in \mathbb {N}$
. The set
$i\in \mathbb {N}$
. The set
 $A'$
is clearly computable, and therefore so is
$A'$
is clearly computable, and therefore so is
 $A'\times X_2$
, which is the topological attractor of
$A'\times X_2$
, which is the topological attractor of
 $T"$
.
$T"$
.
4.4 A
$\Sigma _{2}$
-complete statistical attractor

Theorem 4.4. There exists a computable map
 $T:X\to X$
with a
$T:X\to X$
with a
 $\Sigma _{2}$
-complete statistical attractor.
$\Sigma _{2}$
-complete statistical attractor.
Proof. Consider the set
 $$ \begin{align*}\mathcal{F}in = \{i \in \mathbb{N} : M_{i} \text{ has a finite domain}\}\end{align*} $$
$$ \begin{align*}\mathcal{F}in = \{i \in \mathbb{N} : M_{i} \text{ has a finite domain}\}\end{align*} $$
of indices of machines that halt on a finite number of inputs. It is well known that this is a
 $\Sigma _{2}$
-complete set.
$\Sigma _{2}$
-complete set.
Let
 $X=\{0,1\}^{\mathbb {N}}$
. We describe dynamics
$X=\{0,1\}^{\mathbb {N}}$
. We describe dynamics
 $T:X \to X$
having an invariant closed set A that is the support of an invariant measure
$T:X \to X$
having an invariant closed set A that is the support of an invariant measure
 $\nu $
such that
$\nu $
such that
 $\nu _{x} = \nu $
for almost every x (with respect to a shift-ergodic probability measure of full support). A will therefore be the statistical attractor of T.
$\nu _{x} = \nu $
for almost every x (with respect to a shift-ergodic probability measure of full support). A will therefore be the statistical attractor of T.
Define A as the set of points
 $x\in X$
that do not contain any of the words of the form
$x\in X$
that do not contain any of the words of the form
 $10^k1^{n}0$
for which the nth Turing machine halts on any input of size larger than k, nor any of the words of the form
$10^k1^{n}0$
for which the nth Turing machine halts on any input of size larger than k, nor any of the words of the form
 $01^n0$
for which
$01^n0$
for which
 $n\notin \mathcal {F}in$
. This set is a closed shift-invariant set. Moreover, since
$n\notin \mathcal {F}in$
. This set is a closed shift-invariant set. Moreover, since
 $$ \begin{align*}[01^{n}0]_0\cap A \ne\emptyset \iff n \in \mathcal{F}in, \end{align*} $$
$$ \begin{align*}[01^{n}0]_0\cap A \ne\emptyset \iff n \in \mathcal{F}in, \end{align*} $$
A is
 $\Sigma _{2}$
-complete.
$\Sigma _{2}$
-complete.
The definition of T is as follows. For
 $x\in X$
, the ith bit of
$x\in X$
, the ith bit of
 $T(x)$
, denoted by
$T(x)$
, denoted by
 $T(x)_{i}$
, is given by the following.
$T(x)_{i}$
, is given by the following.
-
(1) If there exist
$j_0<j_{1}\leq i < j_{2} \leq 2i$
such that
$x_{[j_{1},j_{2}]}=01^{l}0$
with
$l<j_{1}$
,
$x_{[j_{0},j_{2}]}=10^k1^{l}0$
and the machine
$M_{l}$
halts on any input of size between k and
$j_1$
in at most
$j_{1}$
steps, then
$T(x)_{i}=0$
. -
(2) Otherwise,
$T(x)_{i}=x_{i+1}$
.









In other words, the function T deletes in x every block of
 $1\text{'}s$
of length l that satisfies the following condition: if the block appears at position i and is preceded by a block of
$1\text{'}s$
of length l that satisfies the following condition: if the block appears at position i and is preceded by a block of
 $0\text{'}s$
of size
$0\text{'}s$
of size
 $k\leq i$
, then the machine
$k\leq i$
, then the machine
 $M_{l}$
halts, in at most i steps, on at least one input whose size is between k and i. We remark that, if a block is not deleted by one iteration of T, then it will be shifted so that it will eventually reach the position
$M_{l}$
halts, in at most i steps, on at least one input whose size is between k and i. We remark that, if a block is not deleted by one iteration of T, then it will be shifted so that it will eventually reach the position
 $0$
. It is clear that such T is a computable function.
$0$
. It is clear that such T is a computable function.
Define
 $\phi ':X\longrightarrow X$
such that
$\phi ':X\longrightarrow X$
such that
 $\phi '(x)_i\ne x_i$
if and only if there exist
$\phi '(x)_i\ne x_i$
if and only if there exist
 $j_{1}< i < j_{2}$
such that
$j_{1}< i < j_{2}$
such that
 $x_{[j_{1},j_{2}]}=01^{n}0$
and the machine
$x_{[j_{1},j_{2}]}=01^{n}0$
and the machine
 $M_{n}$
does not have a finite domain (that is,
$M_{n}$
does not have a finite domain (that is,
 $n\notin \mathcal {F}in$
) or if
$n\notin \mathcal {F}in$
) or if
 $x_{[j_{1},j_{2}]}=10^k1^n0$
and the machine
$x_{[j_{1},j_{2}]}=10^k1^n0$
and the machine
 $M_{n}$
halts on an input of size larger than k. The function
$M_{n}$
halts on an input of size larger than k. The function
 $\phi '$
is continuous on
$\phi '$
is continuous on
 $X\setminus \{w1^{\infty }:w\in \{0,1\}^{\ast }\}$
, so it is measurable. As in the proof of Theorem 4.1, the function
$X\setminus \{w1^{\infty }:w\in \{0,1\}^{\ast }\}$
, so it is measurable. As in the proof of Theorem 4.1, the function
 $\phi '$
is not shift invariant, but if
$\phi '$
is not shift invariant, but if
 $\mu $
is shift invariant, the sequence
$\mu $
is shift invariant, the sequence
 $(\sigma ^n\phi '\mu )_{n\in \mathbb {N}}$
converges towards a measure denoted
$(\sigma ^n\phi '\mu )_{n\in \mathbb {N}}$
converges towards a measure denoted
 $\tilde {\mu }$
. Moreover, if
$\tilde {\mu }$
. Moreover, if
 $\mu $
has full support, then the support of
$\mu $
has full support, then the support of
 $\tilde {\mu }$
is A.
$\tilde {\mu }$
is A.
Let
 $\mu $
be a probability measure of full support on X that is shift ergodic. We show that
$\mu $
be a probability measure of full support on X that is shift ergodic. We show that
 $$ \begin{align*}T^n\mu\underset{n\to\infty}{\longrightarrow}\tilde{\mu}.\end{align*} $$
$$ \begin{align*}T^n\mu\underset{n\to\infty}{\longrightarrow}\tilde{\mu}.\end{align*} $$
Let
 $\epsilon>0$
and
$\epsilon>0$
and
 $w\in \{0,1\}^{\ast }$
. Consider two integers
$w\in \{0,1\}^{\ast }$
. Consider two integers
 $k,l\in \mathbb {N}$
such that the Turing machine
$k,l\in \mathbb {N}$
such that the Turing machine
 $M_l$
does not halt on any input of size larger than k.
$M_l$
does not halt on any input of size larger than k.
The set
 $\bigcup _{i\in \mathbb {N}}\sigma ^{-i}([0^k1^l0]_0)$
is
$\bigcup _{i\in \mathbb {N}}\sigma ^{-i}([0^k1^l0]_0)$
is
 $\sigma $
-invariant. Since
$\sigma $
-invariant. Since
 $\mu $
is
$\mu $
is
 $\sigma $
-ergodic and has full support, this set has measure one, so there exists
$\sigma $
-ergodic and has full support, this set has measure one, so there exists
 $K\in \mathbb {N}$
such that
$K\in \mathbb {N}$
such that
 $$ \begin{align*}\mu\bigg(\bigcup^K_{i=0}\sigma^{-i}([0^k1^l0]_0)\bigg)\geq 1-\frac{\epsilon}{2}.\end{align*} $$
$$ \begin{align*}\mu\bigg(\bigcup^K_{i=0}\sigma^{-i}([0^k1^l0]_0)\bigg)\geq 1-\frac{\epsilon}{2}.\end{align*} $$
Consider
 $$ \begin{align*}B=\bigg(\bigcup_{i=0}^K\sigma^{-i}([0^k1^l0]_0)\bigg) \cap \sigma^{-|w|+K+k+l+1}\bigg(\bigcup_{i=0}^K\sigma^{-i}([0^k1^l0]_0)\bigg).\end{align*} $$
$$ \begin{align*}B=\bigg(\bigcup_{i=0}^K\sigma^{-i}([0^k1^l0]_0)\bigg) \cap \sigma^{-|w|+K+k+l+1}\bigg(\bigcup_{i=0}^K\sigma^{-i}([0^k1^l0]_0)\bigg).\end{align*} $$
One has
 $\mu (B)\geq 1-\epsilon $
. Consider all pairs
$\mu (B)\geq 1-\epsilon $
. Consider all pairs
 $(k',l')\in [0,3K+|w|]^2$
such that
$(k',l')\in [0,3K+|w|]^2$
such that
 $M_{l'}$
halts on at least some input of size larger than
$M_{l'}$
halts on at least some input of size larger than
 $k'$
and denote by
$k'$
and denote by
 $w_{l',k'}$
the shortest input larger than
$w_{l',k'}$
the shortest input larger than
 $k'$
where
$k'$
where
 $M_{l'}$
halts. Now, let N be the maximum of the biggest halting times on the inputs
$M_{l'}$
halts. Now, let N be the maximum of the biggest halting times on the inputs
 $w_{l',k'}$
and
$w_{l',k'}$
and
 $|w_{l',k'}|$
for all these pairs.
$|w_{l',k'}|$
for all these pairs.
Consider
 $x\in \sigma ^{-n}(B)$
for
$x\in \sigma ^{-n}(B)$
for
 $n\geq \max (K+|w|+k+l+1,N)$
. There exists
$n\geq \max (K+|w|+k+l+1,N)$
. There exists
 $j_1,j_2\in \mathbb {N}$
such that
$j_1,j_2\in \mathbb {N}$
such that
 $$ \begin{align*}n\kern1.5pt{-}\kern1.5ptK\kern1.4pt{-}\kern1.4ptk\kern1.4pt{-}\kern1.4ptl\kern1.4pt{-}\kern1.4pt1\kern1.4pt{\leq}\kern1.4pt j_1\kern1.4pt{<}\kern1.4pt j_1\kern1.4pt{+}\kern1.4ptk\kern1.4pt{+}\kern1.4ptl\kern1.4pt{+}\kern1.4pt1\kern1.4pt{<}\kern1.4pt n\kern1.4pt{\leq}\kern1.4pt n\kern1.4pt{+}\kern1.4pt|w|\kern1.4pt{-}\kern1.4pt1\kern1.4pt{\leq}\kern1.4pt j_2\kern1.4pt{\leq}\kern1.4pt n\kern1.4pt{+}\kern1.4pt2K\kern1.4pt{+}\kern1.4pt|w|\kern1.4pt{+}\kern1.4ptk\kern1.4pt{+}\kern1.4ptl\kern1.5pt{+}\kern1.5pt1\end{align*} $$
$$ \begin{align*}n\kern1.5pt{-}\kern1.5ptK\kern1.4pt{-}\kern1.4ptk\kern1.4pt{-}\kern1.4ptl\kern1.4pt{-}\kern1.4pt1\kern1.4pt{\leq}\kern1.4pt j_1\kern1.4pt{<}\kern1.4pt j_1\kern1.4pt{+}\kern1.4ptk\kern1.4pt{+}\kern1.4ptl\kern1.4pt{+}\kern1.4pt1\kern1.4pt{<}\kern1.4pt n\kern1.4pt{\leq}\kern1.4pt n\kern1.4pt{+}\kern1.4pt|w|\kern1.4pt{-}\kern1.4pt1\kern1.4pt{\leq}\kern1.4pt j_2\kern1.4pt{\leq}\kern1.4pt n\kern1.4pt{+}\kern1.4pt2K\kern1.4pt{+}\kern1.4pt|w|\kern1.4pt{+}\kern1.4ptk\kern1.4pt{+}\kern1.4ptl\kern1.5pt{+}\kern1.5pt1\end{align*} $$
 $$ \begin{align*}\text{ and }x_{[j_1,j_1+k+l+1]}=x_{[j_2,j_2+k+l+1]}=0^k1^l0.\end{align*} $$
$$ \begin{align*}\text{ and }x_{[j_1,j_1+k+l+1]}=x_{[j_2,j_2+k+l+1]}=0^k1^l0.\end{align*} $$
Thus, all blocks of
 $1\text{'}s$
contained in
$1\text{'}s$
contained in
 $x_{[j_1,j_2+k+l]}$
have length smaller than
$x_{[j_1,j_2+k+l]}$
have length smaller than
 $2K+k+l+1+|w|$
, so they are erased by T if the corresponding Turing machines halts on at least some input of size larger than the number of
$2K+k+l+1+|w|$
, so they are erased by T if the corresponding Turing machines halts on at least some input of size larger than the number of
 $0$
that precedes them. As a block of
$0$
that precedes them. As a block of
 $1's$
cannot disappear after one iteration of T, it follows that
$1's$
cannot disappear after one iteration of T, it follows that
 $$ \begin{align*}T^n(x)_{[0,|w|-1]}=\phi'(x)_{[n,n+|w|-1]}.\end{align*} $$
$$ \begin{align*}T^n(x)_{[0,|w|-1]}=\phi'(x)_{[n,n+|w|-1]}.\end{align*} $$
Thus, for all
 $x\in X$
, one has
$x\in X$
, one has
 $$ \begin{align*}|\delta_{T^n(x)}[w]-\mathbf{1}_{[w]}(\sigma\phi^{\prime}n(x))|\leq1-\mathbf{1}_{\sigma^{-n+K+k+l+1}(B)}(x),\end{align*} $$
$$ \begin{align*}|\delta_{T^n(x)}[w]-\mathbf{1}_{[w]}(\sigma\phi^{\prime}n(x))|\leq1-\mathbf{1}_{\sigma^{-n+K+k+l+1}(B)}(x),\end{align*} $$
and it follows that, for
 $\mu $
-almost x, one has
$\mu $
-almost x, one has
 $$ \begin{align*} \bigg|\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[w]-\frac{1}{N}\sum_{n=0}^N\mathbf{1}_{[w]}(\sigma^n(\phi'(x)))\bigg|&\leq 1-\frac{1}{N-K}\sum_{n=K}^N\mathbf{1}_{\sigma^{-n+K+k+l+1}(B)}(x)\\ &\underset{N\to\infty}{\longrightarrow}1-\mu(B)=\epsilon. \end{align*} $$
$$ \begin{align*} \bigg|\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[w]-\frac{1}{N}\sum_{n=0}^N\mathbf{1}_{[w]}(\sigma^n(\phi'(x)))\bigg|&\leq 1-\frac{1}{N-K}\sum_{n=K}^N\mathbf{1}_{\sigma^{-n+K+k+l+1}(B)}(x)\\ &\underset{N\to\infty}{\longrightarrow}1-\mu(B)=\epsilon. \end{align*} $$
We conclude that, for
 $\mu $
-almost every x,
$\mu $
-almost every x,
 $$ \begin{align*}\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[w]\underset{N\to\infty}{\longrightarrow}\tilde{\mu}[w]\end{align*} $$
$$ \begin{align*}\frac{1}{N}\sum_{n=0}^N\delta_{T^n(x)}[w]\underset{N\to\infty}{\longrightarrow}\tilde{\mu}[w]\end{align*} $$
and that the support of
 $\tilde {\mu }$
is exactly A.
$\tilde {\mu }$
is exactly A.
5 Interval maps with computationally complex attractors
In this section, we develop a simple construction that allows us to embed any computable dynamics over a symbolic space into a computable dynamics of the unit interval in a way that preserves metric and statistical attractors. We then use this construction to provide examples of computable maps of the interval exhibiting computationally complex attractors.
Theorem 5.1. Let
 $T:\{0,1\}^{\mathbb {N}}\to \{0,1\}^{\mathbb {N}}$
be a computable transformation. Then there exists a computable Cantor set
$T:\{0,1\}^{\mathbb {N}}\to \{0,1\}^{\mathbb {N}}$
be a computable transformation. Then there exists a computable Cantor set
 $\mathcal {C}\subset [0,1]$
, a computable homeomorphism
$\mathcal {C}\subset [0,1]$
, a computable homeomorphism
 $\phi :\{0,1\}^{\mathbb {N}}\to \mathcal {C}$
and a computable map
$\phi :\{0,1\}^{\mathbb {N}}\to \mathcal {C}$
and a computable map
 $f:[0,1] \to [0,1]$
preserving
$f:[0,1] \to [0,1]$
preserving
 $\mathcal {C}$
such that:
$\mathcal {C}$
such that:
-
(1)
$\phi $
conjugates T to f over
$\mathcal {C}$
; -
(2) for Lebesgue almost every
$x\in [0,1]$
,
$\omega _{f}(x)\subset \mathcal {C}$
; and -
(3) if T has a metric or statistical attractor, then
$\mathcal {A} = \phi (A) \subset \mathcal {C}$
is an attractor for f of the same type.





Proof. Let
 $\unicode{x3bb} $
denote the Lebesgue measure over
$\unicode{x3bb} $
denote the Lebesgue measure over
 $[0,1]$
. We construct a fat Cantor set
$[0,1]$
. We construct a fat Cantor set
 $\mathcal {C}$
with Lebesgue measure
$\mathcal {C}$
with Lebesgue measure
 $1/2$
. Of course, the number
$1/2$
. Of course, the number
 $\tfrac 12$
could be replaced by any other positive computable number smaller than
$\tfrac 12$
could be replaced by any other positive computable number smaller than
 $1$
. Let
$1$
. Let
 $a_n$
be a computable sequence of positive real numbers such that
$a_n$
be a computable sequence of positive real numbers such that
 $\sum _n a_n = 1$
and let
$\sum _n a_n = 1$
and let
 $b_n=2^{-a_n}<1$
. Then
$b_n=2^{-a_n}<1$
. Then
 $$ \begin{align*} \prod_n b_n=2^{-\sum_n a_n} = \frac{1}{2}. \end{align*} $$
$$ \begin{align*} \prod_n b_n=2^{-\sum_n a_n} = \frac{1}{2}. \end{align*} $$
For every word
 $w\in \{0,1\}^*$
, we define a closed interval
$w\in \{0,1\}^*$
, we define a closed interval
 $I_w \subset [0,1]$
inductively on
$I_w \subset [0,1]$
inductively on
 $|w|$
. Start by setting
$|w|$
. Start by setting
 $I_\epsilon =[0,1]$
, where
$I_\epsilon =[0,1]$
, where
 $\epsilon $
is the empty word. Assume that
$\epsilon $
is the empty word. Assume that
 $I_w$
has been defined. Then
$I_w$
has been defined. Then
 $I_{w0}$
and
$I_{w0}$
and
 $I_{w1}$
are constructed by removing an open segment centered at the middle of
$I_{w1}$
are constructed by removing an open segment centered at the middle of
 $I_w$
, such that
$I_w$
, such that
 $$ \begin{align*} \unicode{x3bb}(I_{w0})+\unicode{x3bb}(I_{w1})=b_{|w|}\unicode{x3bb}(I_w). \end{align*} $$
$$ \begin{align*} \unicode{x3bb}(I_{w0})+\unicode{x3bb}(I_{w1})=b_{|w|}\unicode{x3bb}(I_w). \end{align*} $$
We denote by
 $$ \begin{align*} \mathcal{C}_{n} = \bigcup_{|w|=n} I_{w} \end{align*} $$
$$ \begin{align*} \mathcal{C}_{n} = \bigcup_{|w|=n} I_{w} \end{align*} $$
the collection of the
 $2^{n}$
intervals constructed at stage n. The Cantor set C is then defined by
$2^{n}$
intervals constructed at stage n. The Cantor set C is then defined by
 $$ \begin{align*} \mathcal{C}=\bigcap_n \mathcal{C}_{n}. \end{align*} $$
$$ \begin{align*} \mathcal{C}=\bigcap_n \mathcal{C}_{n}. \end{align*} $$
Note that, by construction,
 $$ \begin{align*} \unicode{x3bb}(\mathcal{C}_{n+1}) = \sum_{|w|=n}b_{n}\unicode{x3bb}(I_{w}) = b_{n}\unicode{x3bb}(\mathcal{C}_{n}), \end{align*} $$
$$ \begin{align*} \unicode{x3bb}(\mathcal{C}_{n+1}) = \sum_{|w|=n}b_{n}\unicode{x3bb}(I_{w}) = b_{n}\unicode{x3bb}(\mathcal{C}_{n}), \end{align*} $$
and, therefore,
 $$ \begin{align*} \unicode{x3bb}(\mathcal{C})=\prod_n b_n=\frac{1}{2}. \end{align*} $$
$$ \begin{align*} \unicode{x3bb}(\mathcal{C})=\prod_n b_n=\frac{1}{2}. \end{align*} $$
The extreme points of each
 $I_w$
are computable real numbers, uniformly in w. Thus,
$I_w$
are computable real numbers, uniformly in w. Thus,
 $\mathcal {C}$
is a computable set.
$\mathcal {C}$
is a computable set.
For any given finite binary sequence w, an easy computation shows that
 $$ \begin{align*} \unicode{x3bb}(I_{w}\cap \mathcal{C}_{|w|+k})=2^{-|w|} \prod_{i\ < |w|+k }b_{i}, \end{align*} $$
$$ \begin{align*} \unicode{x3bb}(I_{w}\cap \mathcal{C}_{|w|+k})=2^{-|w|} \prod_{i\ < |w|+k }b_{i}, \end{align*} $$
and thus we have that
 $$ \begin{align} \unicode{x3bb}(I_{w}\cap \mathcal{C})=2^{-|w|} \unicode{x3bb} (\mathcal{C}). \end{align} $$
$$ \begin{align} \unicode{x3bb}(I_{w}\cap \mathcal{C})=2^{-|w|} \unicode{x3bb} (\mathcal{C}). \end{align} $$
Let
 $\phi :\{0,1\}^{\mathbb {N}}\to \mathcal {C}$
be the homeomorphism defined by
$\phi :\{0,1\}^{\mathbb {N}}\to \mathcal {C}$
be the homeomorphism defined by
 $$ \begin{align*} \phi(x)=\bigcap_{n}I_{x_{[0,n]}}. \end{align*} $$
$$ \begin{align*} \phi(x)=\bigcap_{n}I_{x_{[0,n]}}. \end{align*} $$
It is clear that
 $\phi $
is computable. Note that, by equation (5.1),
$\phi $
is computable. Note that, by equation (5.1),
 $\phi $
sends the uniform measure
$\phi $
sends the uniform measure
 $\mathfrak {m}$
over
$\mathfrak {m}$
over
 $\{0,1\}^{\mathbb {N}}$
to the Lebesgue measure
$\{0,1\}^{\mathbb {N}}$
to the Lebesgue measure
 $\unicode{x3bb} $
conditioned to
$\unicode{x3bb} $
conditioned to
 $\mathcal {C}$
: that is,
$\mathcal {C}$
: that is,
 $$ \begin{align*} \unicode{x3bb}(\cdot|\mathcal{C})=\frac{\unicode{x3bb}(\cdot\cap \mathcal{C})}{\unicode{x3bb}(\mathcal{C})}. \end{align*} $$
$$ \begin{align*} \unicode{x3bb}(\cdot|\mathcal{C})=\frac{\unicode{x3bb}(\cdot\cap \mathcal{C})}{\unicode{x3bb}(\mathcal{C})}. \end{align*} $$
Moreover, since
 $$ \begin{align} \unicode{x3bb}(I_{w})=2^{-|w|}\unicode{x3bb}(\mathcal{C}_{|w|})=2^{-|w|}\prod_{i< n}b_{i}<2^{-|w|}, \end{align} $$
$$ \begin{align} \unicode{x3bb}(I_{w})=2^{-|w|}\unicode{x3bb}(\mathcal{C}_{|w|})=2^{-|w|}\prod_{i< n}b_{i}<2^{-|w|}, \end{align} $$
we see that
 $d(x,y)\leq 2^{-n}$
implies that
$d(x,y)\leq 2^{-n}$
implies that
 $|\phi (x)-\phi (y)|\leq 2^{-n}$
, where
$|\phi (x)-\phi (y)|\leq 2^{-n}$
, where
 $d(x,y)$
denotes the usual distance on binary sequences. In the opposite direction, however, observe that even if
$d(x,y)$
denotes the usual distance on binary sequences. In the opposite direction, however, observe that even if
 $|\phi (x)-\phi (y)|\leq 2^{-(n+1)}$
,
$|\phi (x)-\phi (y)|\leq 2^{-(n+1)}$
,
 $\phi (x)$
and
$\phi (x)$
and
 $\phi (y)$
may lie in different segments of
$\phi (y)$
may lie in different segments of
 $\mathcal {C}_{n}$
and thus
$\mathcal {C}_{n}$
and thus
 $d(x,y)$
could be greater than
$d(x,y)$
could be greater than
 $2^{-n}$
. On the other hand, since the smallest gaps between segments of
$2^{-n}$
. On the other hand, since the smallest gaps between segments of
 $\mathcal {C}_{n}$
(that is, between
$\mathcal {C}_{n}$
(that is, between
 $I_{w0}$
and
$I_{w0}$
and
 $I_{w1}$
, where
$I_{w1}$
, where
 $|w|=n-1$
) have length
$|w|=n-1$
) have length
 $$ \begin{align*} 2^{-(n-1)} (1-b_{n-1}) \prod_{i < n-1} b_{i}, \end{align*} $$
$$ \begin{align*} 2^{-(n-1)} (1-b_{n-1}) \prod_{i < n-1} b_{i}, \end{align*} $$
we have that
 $$ \begin{align} |\phi(x)-\phi(y)| < 2^{-n}(1-b_{n-1}) \implies d(x,y)\leq 2^{-n}. \end{align} $$
$$ \begin{align} |\phi(x)-\phi(y)| < 2^{-n}(1-b_{n-1}) \implies d(x,y)\leq 2^{-n}. \end{align} $$
Now, for
 $\alpha \in \mathcal {C}$
, define f by
$\alpha \in \mathcal {C}$
, define f by
 $$ \begin{align*} f(\alpha)=\phi \circ T \circ \phi^{-1} (\alpha) \end{align*} $$
$$ \begin{align*} f(\alpha)=\phi \circ T \circ \phi^{-1} (\alpha) \end{align*} $$
so as to make f conjugate to T on
 $\mathcal {C}$
. We now explain how to define f on the gaps. Since T is computable and
$\mathcal {C}$
. We now explain how to define f on the gaps. Since T is computable and
 $\{0,1\}^{\mathbb {N}}$
is recursively compact, it has a computable modulus of uniform continuity. In particular, we can compute a function
$\{0,1\}^{\mathbb {N}}$
is recursively compact, it has a computable modulus of uniform continuity. In particular, we can compute a function
 $m:\mathbb {N}\to \mathbb {N}$
satisfying
$m:\mathbb {N}\to \mathbb {N}$
satisfying
 $$ \begin{align*} m(n) \nearrow \infty \quad \text{as} \quad n \to \infty \end{align*} $$
$$ \begin{align*} m(n) \nearrow \infty \quad \text{as} \quad n \to \infty \end{align*} $$
and such that
 $$ \begin{align*} d(T(x),T(y))\leq 2^{-m(n)}\quad \text{whenever } d(x,y)\leq2^{-n}. \end{align*} $$
$$ \begin{align*} d(T(x),T(y))\leq 2^{-m(n)}\quad \text{whenever } d(x,y)\leq2^{-n}. \end{align*} $$
Let w be a finite binary word of length n defining a segment
 $I_{w}$
of
$I_{w}$
of
 $\mathcal {C}_{n}$
and let
$\mathcal {C}_{n}$
and let
 $$ \begin{align*} a=\phi(w01^{\infty}); \quad b=\phi(w10^{\infty}) \end{align*} $$
$$ \begin{align*} a=\phi(w01^{\infty}); \quad b=\phi(w10^{\infty}) \end{align*} $$
be the extreme points of the gap between the two consecutive segments
 $I_{w0}$
and
$I_{w0}$
and
 $I_{w1}$
of
$I_{w1}$
of
 $\mathcal {C}_{n+1}$
. Then
$\mathcal {C}_{n+1}$
. Then
 $$ \begin{align*} d(w01^{\infty},w10^{\infty})\leq 2^{-n} \end{align*} $$
$$ \begin{align*} d(w01^{\infty},w10^{\infty})\leq 2^{-n} \end{align*} $$
and thus
 $$ \begin{align*} d(T(w01^{\infty}),T(w10^{\infty})) \leq 2^{-m(n)}. \end{align*} $$
$$ \begin{align*} d(T(w01^{\infty}),T(w10^{\infty})) \leq 2^{-m(n)}. \end{align*} $$
It follows that
 $f(a)=\phi (T(w01^{\infty }))$
and
$f(a)=\phi (T(w01^{\infty }))$
and
 $f(b)=\phi (T(w10^{\infty }))$
both belong to a same segment
$f(b)=\phi (T(w10^{\infty }))$
both belong to a same segment
 $I'$
of
$I'$
of
 $\mathcal {C}_{m(n)}$
. We then define f on
$\mathcal {C}_{m(n)}$
. We then define f on
 $[a,b]$
in a piecewise linear and continuous way so as to have
$[a,b]$
in a piecewise linear and continuous way so as to have
 $$ \begin{align*} f([a,b])=I' \end{align*} $$
$$ \begin{align*} f([a,b])=I' \end{align*} $$
with at most three pieces in such a way that at least half of
 $[a,b]$
gets linearly mapped to
$[a,b]$
gets linearly mapped to
 $I'$
(see Figure 3).
$I'$
(see Figure 3).
The function f on the gap
 $[a,b]$
between intervals
$[a,b]$
between intervals
 $I_{w0}$
and
$I_{w0}$
and
 $I_{w1}$
of C.
$I_{w1}$
of C.
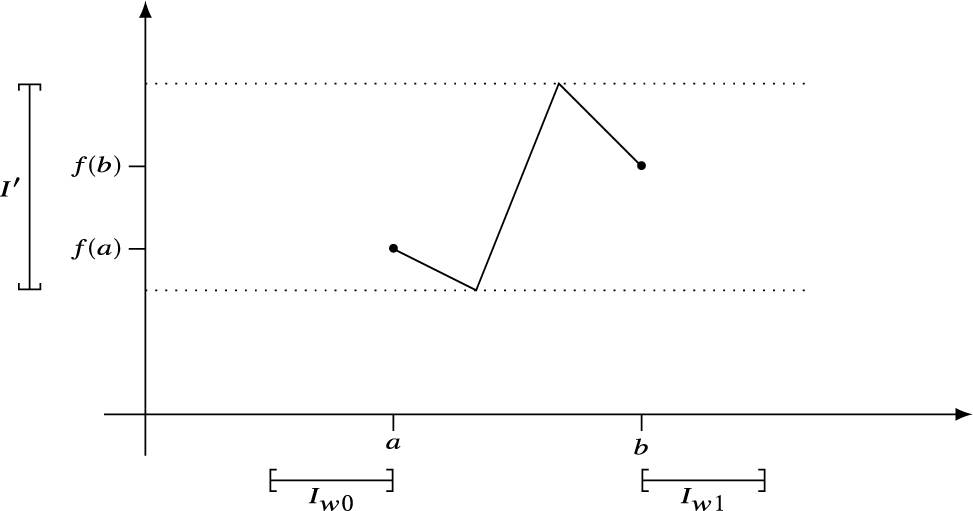
Note that f is well defined and continuous. In particular, by equation (5.3) we have that, for any
 $x,y$
in
$x,y$
in
 $[0,1]$
,
$[0,1]$
,
 $$ \begin{align*} |f(x)-f(y)| \leq 2^{-m(n)} \quad \text{whenever } |x-y|\leq 2^{-s(n)}, \end{align*} $$
$$ \begin{align*} |f(x)-f(y)| \leq 2^{-m(n)} \quad \text{whenever } |x-y|\leq 2^{-s(n)}, \end{align*} $$
where
 $s(n):\mathbb {N}\to \mathbb {N}$
is an increasing function such that
$s(n):\mathbb {N}\to \mathbb {N}$
is an increasing function such that
 $$ \begin{align*}2^{-s(n)}\leq 2^{-n}(1-b_{n-1}).\end{align*} $$
$$ \begin{align*}2^{-s(n)}\leq 2^{-n}(1-b_{n-1}).\end{align*} $$
This shows part (1) of the theorem.
To prove part (2) note that, by construction, the proportion of points in the complement of
 $\mathcal {C}$
that fall in
$\mathcal {C}$
that fall in
 $\mathcal {C}$
after one iteration of f is at least one-quarter. Indeed, since f sends more than half of any given gap
$\mathcal {C}$
after one iteration of f is at least one-quarter. Indeed, since f sends more than half of any given gap
 $[a,b]$
onto a whole segment
$[a,b]$
onto a whole segment
 $I^{k}$
of a certain level
$I^{k}$
of a certain level
 $\mathcal {C}_{k}$
in a linear way, it follows that
$\mathcal {C}_{k}$
in a linear way, it follows that
 $$ \begin{align*} \unicode{x3bb}\bigg([a,b] \bigcap f^{-1}(\mathcal{C}) \bigg) = \unicode{x3bb}\bigg([a,b] \bigcap f^{-1}(\mathcal{C} \cap I^{k}) \bigg) \geq \frac{\unicode{x3bb}([a,b])}{2} \frac{\unicode{x3bb}(\mathcal{C}\cap I^{k})}{\unicode{x3bb}(I^{k})},\end{align*} $$
$$ \begin{align*} \unicode{x3bb}\bigg([a,b] \bigcap f^{-1}(\mathcal{C}) \bigg) = \unicode{x3bb}\bigg([a,b] \bigcap f^{-1}(\mathcal{C} \cap I^{k}) \bigg) \geq \frac{\unicode{x3bb}([a,b])}{2} \frac{\unicode{x3bb}(\mathcal{C}\cap I^{k})}{\unicode{x3bb}(I^{k})},\end{align*} $$
which, by equations (5.1) and (5.2), equals
 $$ \begin{align} \frac{\unicode{x3bb}([a,b])2^{-k}\unicode{x3bb}(\mathcal{C})}{2^{-k-1}\unicode{x3bb}(\mathcal{C}_{k})}\geq\frac{\unicode{x3bb}[a,b]}{4}, \end{align} $$
$$ \begin{align} \frac{\unicode{x3bb}([a,b])2^{-k}\unicode{x3bb}(\mathcal{C})}{2^{-k-1}\unicode{x3bb}(\mathcal{C}_{k})}\geq\frac{\unicode{x3bb}[a,b]}{4}, \end{align} $$
so we obtain
 $$ \begin{align} \unicode{x3bb}\bigg( ([0,1]\setminus\mathcal{C})\cap f^{-1}\mathcal{C}\bigg) \geq \frac{\unicode{x3bb}([0,1]\setminus\mathcal{C})}{4}. \end{align} $$
$$ \begin{align} \unicode{x3bb}\bigg( ([0,1]\setminus\mathcal{C})\cap f^{-1}\mathcal{C}\bigg) \geq \frac{\unicode{x3bb}([0,1]\setminus\mathcal{C})}{4}. \end{align} $$
Since
 $\mathcal {C}$
is invariant under f, it follows that the Lebesgue measure of the set of points that remain in the complement of
$\mathcal {C}$
is invariant under f, it follows that the Lebesgue measure of the set of points that remain in the complement of
 $\mathcal {C}$
after n iterations of f is at most
$\mathcal {C}$
after n iterations of f is at most
 $(\tfrac 34)^{n}$
, and thus
$(\tfrac 34)^{n}$
, and thus
 $\omega (x)\subset \mathcal {C}$
for almost every
$\omega (x)\subset \mathcal {C}$
for almost every
 $x\in [0,1]$
.
$x\in [0,1]$
.
To prove (3), recall that
 $\phi ^{-1}$
sends
$\phi ^{-1}$
sends
 $\unicode{x3bb} (\cdot | \mathcal {C})$
to
$\unicode{x3bb} (\cdot | \mathcal {C})$
to
 $\mathfrak {m}$
, and thus, if
$\mathfrak {m}$
, and thus, if
 $\mathfrak {m}(\phi ^{-1}E)=0$
, then
$\mathfrak {m}(\phi ^{-1}E)=0$
, then
 ${\unicode{x3bb} (E)=0}$
. Moreover, f is clearly a non-singular map for
${\unicode{x3bb} (E)=0}$
. Moreover, f is clearly a non-singular map for
 $\unicode{x3bb} $
: that is,
$\unicode{x3bb} $
: that is,
 $$ \begin{align*} \unicode{x3bb}(E)=0 \implies \unicode{x3bb}(f^{-n}E)=0 \quad \text{for all } n. \end{align*} $$
$$ \begin{align*} \unicode{x3bb}(E)=0 \implies \unicode{x3bb}(f^{-n}E)=0 \quad \text{for all } n. \end{align*} $$
Thus, no set other than
 $\mathcal {A}$
can have a basin of attraction of positive measure, which is therefore the metric attractor for f whenever A is the metric attractor for T.
$\mathcal {A}$
can have a basin of attraction of positive measure, which is therefore the metric attractor for f whenever A is the metric attractor for T.
Finally, we show that if T has a statistical attractor A, then
 $\mathcal {A}=\phi (A)$
is a statistical attractor for f. Let
$\mathcal {A}=\phi (A)$
is a statistical attractor for f. Let
 $\tilde {\mu }$
be the unique measure whose support is A and consider over
$\tilde {\mu }$
be the unique measure whose support is A and consider over
 $[0,1]$
the push forward measure
$[0,1]$
the push forward measure
 $\mu =\tilde {\mu }\circ \phi ^{-1} $
. It is clear that, for almost every point
$\mu =\tilde {\mu }\circ \phi ^{-1} $
. It is clear that, for almost every point
 $x\in \mathcal {C}$
, we have
$x\in \mathcal {C}$
, we have
 $\nu _x=\mu $
. Suppose that there exists a positive measure set
$\nu _x=\mu $
. Suppose that there exists a positive measure set
 $E\subset [0,1]\setminus \mathcal {C}$
such that
$E\subset [0,1]\setminus \mathcal {C}$
such that
 $\nu _x\neq \mu $
for all
$\nu _x\neq \mu $
for all
 $x\in E$
. Let
$x\in E$
. Let
 $E_1=\{x\in E: f(x)\in \mathcal {C} \}$
be the set of points in E that fall in
$E_1=\{x\in E: f(x)\in \mathcal {C} \}$
be the set of points in E that fall in
 $\mathcal {C}$
after one iteration of f. Note that, by inequality (5.4),
$\mathcal {C}$
after one iteration of f. Note that, by inequality (5.4),
 $\unicode{x3bb} (E_1)>0$
. But, since f is non-singular,
$\unicode{x3bb} (E_1)>0$
. But, since f is non-singular,
 $f(E_1)$
would be a positive measure set in
$f(E_1)$
would be a positive measure set in
 $\mathcal {C}$
whose elements satisfy
$\mathcal {C}$
whose elements satisfy
 $\nu _x\neq \mu $
, which is a contradiction.
$\nu _x\neq \mu $
, which is a contradiction.
Corollary 5.2. There exist a computable map
 $f:[0,1]\to [0,1]$
and an invariant set
$f:[0,1]\to [0,1]$
and an invariant set
 $\mathcal {A}\subset [0,1]$
such that:
$\mathcal {A}\subset [0,1]$
such that:
-
(1)
$\mathcal {A}$
is
$\Pi _1$
-complete; and -
(2)
$\mathcal {A}$
is a transitive metric and statistical attractor for f.



In particular, f has a unique physical measure that is not computable.
Remark 5.3. We note that the map
 $f:[0,1]\to [0,1]$
given by the above corollary has a
$f:[0,1]\to [0,1]$
given by the above corollary has a
 $G_\delta $
-dense set of points in
$G_\delta $
-dense set of points in
 $[0,1]$
that never enter the Cantor set
$[0,1]$
that never enter the Cantor set
 $\mathcal {C}$
under iteration by f. Therefore, the attractor
$\mathcal {C}$
under iteration by f. Therefore, the attractor
 $\mathcal {A}$
of f is not a topological attractor, nor it is strongly attracting, even though the set A is for T.
$\mathcal {A}$
of f is not a topological attractor, nor it is strongly attracting, even though the set A is for T.
Corollary 5.4. There exist a computable map
 $f:[0,1]\to [0,1]$
with a
$f:[0,1]\to [0,1]$
with a
 $\Pi _2$
-complete metric attractor
$\Pi _2$
-complete metric attractor
 $\mathcal {A}$
.
$\mathcal {A}$
.


Acknowledgements
Cristóbal Rojas was partially supported by Grants ANID/ FONDECYT Regular 1230469 and ANID/Basal National Center for Artificial Intelligence CENIA FB210017. Mathieu Sablik was partially supported by ANR project Difference (ANR-20-CE48-0002) and the project Computability of asymptotic properties of dynamical systems from CIMI Labex (ANR-11-LABX-0040). We also thank the anonymous referee for their constructive comments which enabled us to improve the article.

















 Open access
Open access