


1. Introduction
Component importance measures are fundamental tools in reliability engineering, as they quantify how individual components contribute to system-level failures. Such measures play a critical role in system design, maintenance planning, and failure analysis, where identifying critical components is essential. Among the various indices proposed in the literature, Birnbaum [Reference Birnbaum and Krishnaiah4], Barlow–Proschan (BP) [Reference Barlow and Proschan3], and Fussell–Vesely (FV) [Reference Fussell8] importance measures are widely used. These measures evaluate component criticality by examining how component failures are involved in, or contribute to, system-level failure events. In particular, BP importance focuses on the time instant at which a system failure occurs and evaluates whether a component failure transition triggers that failure. For this reason, BP importance is often regarded as a failure-event-based importance measure in reliability analysis.
Despite its widespread use, BP importance has been typically formulated in a model-dependent manner and relies on restrictive assumptions. In particular, nonrepairable and repairable systems are often treated within separate theoretical frameworks, and existing formulations of BP importance depend on assumptions such as independent component lifetimes, renewal structures, stationarity, or Markovian state-transition dynamics. As a consequence, the underlying probabilistic structure of BP importance is not always explicit, and extending its classical definition to more general or nonstationary system models can be technically complex or conceptually ambiguous.
Apart from BP importance, Birnbaum and FV importance were originally defined for static or nonrepairable systems. When these measures are applied to dynamic systems such as repairable or phase-mission systems, an additional conditioning either on time or on the system state is required to make the definitions operational. However, the choice of such conditioning is not unique and often depends on the underlying system model or analysis objective. As a result, the interpretation of these measures in terms of individual system failure events becomes less clear.
1.1. Related work and positioning
Component importance measures have been studied extensively in reliability engineering. Early work focused on static, nonrepairable systems, while subsequent studies extended these concepts to repairable, multistate, and nonstationary systems, including phase-mission systems. A comprehensive treatment of both classical and extended importance measures is given by Kuo and Zhu [Reference Kuo and Zhu10]. The literature relevant to this paper can be broadly grouped into two categories: (i) importance measures for dynamic and nonstationary systems, and (ii) probabilistic foundations based on point processes and Palm measures.
Classical importance measures were originally defined for nonrepairable systems. Birnbaum [Reference Birnbaum and Krishnaiah4] introduced an importance measure based on the sensitivity of system reliability to component reliability. Barlow and Proschan [Reference Barlow and Proschan3] defined an event-based importance measure that evaluates the probability that a component failure transition coincides with the system failure event. Fussell [Reference Fussell8] proposed an importance measure that evaluates the probability that a component is in a failed state when the system is observed to be failed at a given time.
These classical concepts were later extended to dynamic and nonstationary system settings, including repairable, multistate, and phase-mission systems. Natvig [Reference Natvig12] introduced time-dependent importance measures for repairable systems. Cassady et al. [Reference Cassady, Pohl and Jin5] and Barabady and Kumar [Reference Barabady and Kumar2] applied importance measures to availability analysis and maintenance prioritization in repairable settings. Recently, Huseby et al. [Reference Huseby, Kalinowska and Abrahamsen9] revisited Birnbaum-type importance for repairable multistate systems and clarified distinctions between predictive and diagnostic interpretations.
Phase-mission systems introduce additional challenges due to phase-dependent system structures and failure mechanisms. Vaurio [Reference Vaurio14] proposed importance measures that distinguish between importance within individual mission phases and importance associated with phase transitions. Structural analysis approaches for phase-mission systems have also been developed using techniques such as binary decision diagrams and hierarchical methods by Chen et al. [Reference Chen, Yingyi, Kang and Mosleh6].
Despite these advances, most existing importance measures for dynamic and phase-mission systems rely on model-specific assumptions, such as Markovian dynamics, renewal structures, explicit structure functions, or phase-dependent formulations. As a result, the underlying probabilistic structure of these measures is not always transparent, and a unified event-based interpretation of component importance that applies consistently across repairable, nonrepairable, and phase-mission systems remains limited.
Event-based reliability analysis is naturally formulated using point processes and Palm measures. Melamed and Whitt [Reference Melamed and Whitt11] established fundamental results connecting event-stationary and time-stationary distributions through the Arrivals See Time Averages (ASTA) property. El-Taha and Stidham [Reference El-Taha and Stidham7] developed sample-path analysis techniques for stochastic systems based on point process theory. Palm measures have also been applied in related areas, including random measures, stochastic geometry, and likelihood theory [Reference Baccelli, Błaszczyszyn and Karray1, Reference Prokešová and Jensen13].
Although Palm measures provide a rigorous framework for conditioning on event occurrences, their direct use in defining component importance measures has remained limited. In particular, an event-based probabilistic framework that clearly distinguishes between transition-based and state-based importance measures and that applies uniformly to nonrepairable, repairable, and phase-mission systems has not yet been established.
1.2. Contributions of this paper
In this paper, we propose a unified probabilistic framework based on Palm conditioning with respect to system failure events. Instead of conditioning on an arbitrary time or system state, we condition directly on the occurrence of a system failure, which provides a natural reference point for defining component importance. Such importance measures, defined through conditioning on system failure events rather than on fixed time instants or system states, are referred to as failure-event-based component importance measures. Under this event-based conditioning, component importance is defined without relying on renewal assumptions, stationarity, or Markovian dynamics. This Palm-based perspective yields a common probabilistic interpretation applicable to nonrepairable systems, repairable systems, and phase-mission systems.
Within the proposed framework, conditioning on system failure events leads naturally to two distinct types of component importance: transition-based and state-based importance. Transition-based importance quantifies the probability that a component failure transition occurs at a system failure event and captures causal triggering effects. State-based importance, by contrast, quantifies the probability that a component is in a failed state at a system failure event and reflects failure involvement rather than direct causal responsibility. This distinction clarifies how classical importance measures that are traditionally viewed as conceptually different, such as BP and FV importance, can be understood within a single failure-event-based framework. In nonrepairable systems, these definitions recover classical measures as special cases, while yielding well-defined and interpretable extensions to repairable and phase-mission systems.
The remainder of this paper is organized as follows. Section 2 introduces the necessary background on point processes and Palm measures. Section 3 presents the proposed Palm-based framework and defines transition-based and state-based component importance measures. Sections 4–6 examine the resulting importance measures in nonrepairable systems, repairable systems, and phase-mission systems, respectively. Section 7 provides a numerical illustration to demonstrate the interpretation of the proposed measures, followed by concluding remarks and directions for future research in Section 8.
2. Preliminaries
2.1. Point processes and failure events
In this section, we briefly review the theory of point processes and Palm measures, which form the mathematical foundation of the proposed framework [Reference Baccelli, Błaszczyszyn and Karray1].
Let  $(\Omega, \mathcal{F}, \mathbb{P})$ be a probability space. We consider system-level failure events modeled as a simple point process
$(\Omega, \mathcal{F}, \mathbb{P})$ be a probability space. We consider system-level failure events modeled as a simple point process  $N$ on
$N$ on  $\mathbb{R}$. For any Borel set
$\mathbb{R}$. For any Borel set  $B \in \mathcal{B}(\mathbb{R})$,
$B \in \mathcal{B}(\mathbb{R})$,  $N(B)$ denotes the number of failure events occurring in
$N(B)$ denotes the number of failure events occurring in  $B$. We define the counting process
$B$. We define the counting process  $\{N(t)\}_{t \ge 0}$ as
$\{N(t)\}_{t \ge 0}$ as  $N(t) = N((0, t])$.
$N(t) = N((0, t])$.
Throughout this paper, we assume that the point process  $N$ is almost surely non-explosive and locally finite. Unless explicitly stated, we do not impose specific structural assumptions such as renewal property, independence of inter-arrival times, or Markovian dynamics. For a measurable function
$N$ is almost surely non-explosive and locally finite. Unless explicitly stated, we do not impose specific structural assumptions such as renewal property, independence of inter-arrival times, or Markovian dynamics. For a measurable function  $f(t, \omega)$, the integral with respect to
$f(t, \omega)$, the integral with respect to  $N$ is defined as:
$N$ is defined as:
 \begin{equation*}
\int f(t, \omega) N(\mathrm{d}t) = \sum_{k: T_k \in \mathbb{R}} f(T_k, \omega),
\end{equation*}
\begin{equation*}
\int f(t, \omega) N(\mathrm{d}t) = \sum_{k: T_k \in \mathbb{R}} f(T_k, \omega),
\end{equation*}where  $\{T_k\}$ are the random event times of the process
$\{T_k\}$ are the random event times of the process  $N$.
$N$.
2.2. Palm measures
To analyze the system behavior at the moments of failure, we introduce the Palm measure. In this subsection, we assume that  $N$ is stationary with respect to a flow of time-shift operators
$N$ is stationary with respect to a flow of time-shift operators  $\{\theta_t\}_{t \in \mathbb{R}}$, where
$\{\theta_t\}_{t \in \mathbb{R}}$, where  $\theta_t \omega$ represents the state of the universe shifted by time
$\theta_t \omega$ represents the state of the universe shifted by time  $t$.
$t$.
Let  $\lambda = \mathbb{E}[N((0, 1])]$ be the intensity of
$\lambda = \mathbb{E}[N((0, 1])]$ be the intensity of  $N$, and assume
$N$, and assume  $0 \lt \lambda \lt \infty$. The Palm measure
$0 \lt \lambda \lt \infty$. The Palm measure  $\mathbb{P}^0$ associated with
$\mathbb{P}^0$ associated with  $N$ is defined as the probability measure on
$N$ is defined as the probability measure on  $(\Omega, \mathcal{F})$ such that for any
$(\Omega, \mathcal{F})$ such that for any  $A \in \mathcal{F}$:
$A \in \mathcal{F}$:
 \begin{equation}
\mathbb{P}^0(A) = \frac{1}{\lambda} \mathbb{E} \left[ \int_0^1 \mathbf{1}_A(\theta_t \omega) N(\mathrm{d}t) \right].
\end{equation}
\begin{equation}
\mathbb{P}^0(A) = \frac{1}{\lambda} \mathbb{E} \left[ \int_0^1 \mathbf{1}_A(\theta_t \omega) N(\mathrm{d}t) \right].
\end{equation} More generally, for any nonnegative measurable functional  $F$, the following Campbell’s formula holds [Reference El-Taha and Stidham7, Reference Melamed and Whitt11]:
$F$, the following Campbell’s formula holds [Reference El-Taha and Stidham7, Reference Melamed and Whitt11]:
 \begin{equation}
\mathbb{E} \left[ \int_{\mathbb{R}} F(t, \theta_t \omega) N(\mathrm{d}t) \right] = \lambda \int_{\mathbb{R}} \mathbb{E}^0 [F(t, \omega)] \mathrm{d}t.
\end{equation}
\begin{equation}
\mathbb{E} \left[ \int_{\mathbb{R}} F(t, \theta_t \omega) N(\mathrm{d}t) \right] = \lambda \int_{\mathbb{R}} \mathbb{E}^0 [F(t, \omega)] \mathrm{d}t.
\end{equation} Intuitively, the Palm measure  $\mathbb{P}^0$ provides the conditional distribution of the system given that an event occurs at time
$\mathbb{P}^0$ provides the conditional distribution of the system given that an event occurs at time  $t=0$. In reliability analysis, it allows us to define importance measures based on the system’s state, specifically at failure epochs.
$t=0$. In reliability analysis, it allows us to define importance measures based on the system’s state, specifically at failure epochs.
2.3. Finite-time Palm measures
For non-stationary systems or analyses over fixed observation periods, it is practical to use the finite-time Palm measure. Let  $N$ be a point process on
$N$ be a point process on  $[0, T]$ such that
$[0, T]$ such that  $0 \lt \mathbb{E}[N(T)] \lt \infty$. Note that the stationarity of
$0 \lt \mathbb{E}[N(T)] \lt \infty$. Note that the stationarity of  $N$ is not required for finite-time Palm measures.
$N$ is not required for finite-time Palm measures.
The finite-time Palm measure  $\mathbb{P}_T^0$ associated with
$\mathbb{P}_T^0$ associated with  $N$ over
$N$ over  $[0, T]$ is defined as:
$[0, T]$ is defined as:
 \begin{equation}
\mathbb{P}_T^0(A) = \frac{\mathbb{E} \left[ \int_0^T \mathbf{1}_A(\theta_t \omega) N(\mathrm{d}t) \right]}{\mathbb{E}[N(T)]}, \qquad A \in \mathcal{F}.
\end{equation}
\begin{equation}
\mathbb{P}_T^0(A) = \frac{\mathbb{E} \left[ \int_0^T \mathbf{1}_A(\theta_t \omega) N(\mathrm{d}t) \right]}{\mathbb{E}[N(T)]}, \qquad A \in \mathcal{F}.
\end{equation} Equivalently, the finite-time Palm expectation of a functional  $F$ is given by:
$F$ is given by:
 \begin{equation}
\mathbb{E}_T^0[F] = \frac{\mathbb{E} \left[ \int_0^T F(\theta_t \omega) N(\mathrm{d}t) \right]}{\mathbb{E}[N(T)]}.
\end{equation}
\begin{equation}
\mathbb{E}_T^0[F] = \frac{\mathbb{E} \left[ \int_0^T F(\theta_t \omega) N(\mathrm{d}t) \right]}{\mathbb{E}[N(T)]}.
\end{equation} The finite-time Palm measure represents the distribution of the system at a typical event time chosen uniformly from all occurrences within  $[0, T]$ (see [Reference Melamed and Whitt11, Reference Prokešová and Jensen13]). If
$[0, T]$ (see [Reference Melamed and Whitt11, Reference Prokešová and Jensen13]). If  $N$ is stationary with intensity
$N$ is stationary with intensity  $\lambda$, then for any
$\lambda$, then for any  $A \in \mathcal{F}$, the finite-time Palm measure converges to the standard Palm measure as the horizon increases:
$A \in \mathcal{F}$, the finite-time Palm measure converges to the standard Palm measure as the horizon increases:
 \begin{equation*}
\lim_{T \to \infty} \mathbb{P}_T^0(A) = \mathbb{P}^0(A).
\end{equation*}
\begin{equation*}
\lim_{T \to \infty} \mathbb{P}_T^0(A) = \mathbb{P}^0(A).
\end{equation*}3. Palm measure framework
We introduce a Palm measure framework for defining failure-event-based component importance measures. The proposed formulation provides a unified probabilistic formulation for nonrepairable, repairable, and phase-mission systems, without relying on stationarity or specific assumptions regarding the underlying system dynamics.
Let  $X_i(t) \in \{0,1\}$ denote the state of component
$X_i(t) \in \{0,1\}$ denote the state of component  $i$ at time
$i$ at time  $t$, where
$t$, where  $X_i(t)=1$ if the component is operational and
$X_i(t)=1$ if the component is operational and  $X_i(t)=0$ if it is failed. Similarly, let
$X_i(t)=0$ if it is failed. Similarly, let  $X_S(t) \in \{0,1\}$ denote the system state. We assume that the processes
$X_S(t) \in \{0,1\}$ denote the system state. We assume that the processes  $\{X_i(t)\}_{i=1}^n$ and
$\{X_i(t)\}_{i=1}^n$ and  $X_S(t)$ are right-continuous with left limits (càdlàg), allowing for jumps at isolated time instants.
$X_S(t)$ are right-continuous with left limits (càdlàg), allowing for jumps at isolated time instants.
Let  $N$ denote the point process of system failure events, i.e., the discrete times at which the system enters a failed state. In this section, we denote by
$N$ denote the point process of system failure events, i.e., the discrete times at which the system enters a failed state. In this section, we denote by  $\mathbb{P}_0$ the time-asymptotic Palm probability associated with
$\mathbb{P}_0$ the time-asymptotic Palm probability associated with  $N$, defined as the limit
$N$, defined as the limit
 \begin{equation}
\mathbb{P}_0(A) = \lim_{T \to \infty} \mathbb{P}_T^0(A), \quad A \in \mathcal{F},
\end{equation}
\begin{equation}
\mathbb{P}_0(A) = \lim_{T \to \infty} \mathbb{P}_T^0(A), \quad A \in \mathcal{F},
\end{equation}where  $\mathbb{P}_T^0$ is the finite-time Palm measure defined in (3). Probabilities under
$\mathbb{P}_T^0$ is the finite-time Palm measure defined in (3). Probabilities under  $\mathbb{P}_0$ are interpreted as being conditioned on the occurrence of a typical system failure event, with the time origin aligned at the epoch of that event.
$\mathbb{P}_0$ are interpreted as being conditioned on the occurrence of a typical system failure event, with the time origin aligned at the epoch of that event.
Conditioning on system failure events naturally leads to two complementary perspectives on component importance: one based on failure transitions and the other based on failure states.
3.1. Transition-based component importance measures
Transition-based component importance measures quantify the contribution of component-level failure transitions to system failure events.
Definition 3.1. (Palm-based transition importance)
The Palm-based transition importance of component  $i$ is defined as
$i$ is defined as
 \begin{equation}
I_i^{(T)}
=
\mathbb{P}_0 \left(
X_i(0^-)=1,\; X_i(0)=0
\right).
\end{equation}
\begin{equation}
I_i^{(T)}
=
\mathbb{P}_0 \left(
X_i(0^-)=1,\; X_i(0)=0
\right).
\end{equation} The event  $\{X_i(0^-)=1,\; X_i(0)=0\}$ represents a failure transition of component
$\{X_i(0^-)=1,\; X_i(0)=0\}$ represents a failure transition of component  $i$ occurring exactly at the system failure epoch. Thus,
$i$ occurring exactly at the system failure epoch. Thus,  $I_i^{(T)}$ quantifies the probability that a typical system failure event is triggered by, or synchronized with, a failure transition of component
$I_i^{(T)}$ quantifies the probability that a typical system failure event is triggered by, or synchronized with, a failure transition of component  $i$. This transition-based formulation naturally captures component criticality in a causal, event-level sense.
$i$. This transition-based formulation naturally captures component criticality in a causal, event-level sense.
Equivalently,  $I_i^{(T)}$ has the following Campbell-type representation as a time-average:
$I_i^{(T)}$ has the following Campbell-type representation as a time-average:
 \begin{equation}
I_i^{(T)}
=
\lim_{T \to \infty}
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t^-)=1,\; X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation}
\begin{equation}
I_i^{(T)}
=
\lim_{T \to \infty}
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t^-)=1,\; X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation} If the system failure process  $N$ is stationary with finite intensity
$N$ is stationary with finite intensity  $\lambda = \mathbb{E}[N(1)]$, then
$\lambda = \mathbb{E}[N(1)]$, then  $I_i^{(T)}$ reduces to
$I_i^{(T)}$ reduces to
 \begin{equation}
I_i^{(T)}
=
\frac{
\mathbb{E} \left[
\int_0^1
\mathbf{1}_{\{X_i(t^-)=1,\; X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\lambda
}.
\end{equation}
\begin{equation}
I_i^{(T)}
=
\frac{
\mathbb{E} \left[
\int_0^1
\mathbf{1}_{\{X_i(t^-)=1,\; X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\lambda
}.
\end{equation}3.2. State-based component importance measures
State-based component importance measures quantify the involvement of components through their failure states observed at system failure epochs.
Definition 3.2. (Palm-based state importance)
The Palm-based state importance of component  $i$ is defined as
$i$ is defined as
 \begin{equation}
I_i^{(S)}
=
\mathbb{P}_0 \left(
X_i(0)=0
\right).
\end{equation}
\begin{equation}
I_i^{(S)}
=
\mathbb{P}_0 \left(
X_i(0)=0
\right).
\end{equation} The quantity  $I_i^{(S)}$ represents the probability that component
$I_i^{(S)}$ represents the probability that component  $i$ is in a failed state at a typical system failure epoch. Unlike transition-based importance measures, state-based importance does not distinguish whether the component failure directly triggers the system failure event or whether the component had already failed prior to it. Consequently,
$i$ is in a failed state at a typical system failure epoch. Unlike transition-based importance measures, state-based importance does not distinguish whether the component failure directly triggers the system failure event or whether the component had already failed prior to it. Consequently,  $I_i^{(S)}$ captures component failure involvement rather than causal criticality.
$I_i^{(S)}$ captures component failure involvement rather than causal criticality.
In repairable systems, this state-based conditioning may give high importance to components that frequently fail when system failures occur, even if their failure transitions do not directly coincide with system failure events.
Alternatively, the following Campbell-type representation can be used to express  $I_i^{(S)}$ as a time-average:
$I_i^{(S)}$ as a time-average:
 \begin{equation}
I_i^{(S)}
=
\lim_{T \to \infty}
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation}
\begin{equation}
I_i^{(S)}
=
\lim_{T \to \infty}
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation} If the failure process  $N$ is stationary with finite intensity
$N$ is stationary with finite intensity  $\lambda$, this reduces to
$\lambda$, this reduces to
 \begin{equation}
I_i^{(S)}
=
\frac{
\mathbb{E} \left[
\int_0^1
\mathbf{1}_{\{X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\lambda
}.
\end{equation}
\begin{equation}
I_i^{(S)}
=
\frac{
\mathbb{E} \left[
\int_0^1
\mathbf{1}_{\{X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\lambda
}.
\end{equation}3.3. Finite-time palm-based component importance measures
For nonstationary systems or finite observation horizons, the finite-time Palm measure, denoted by  $\mathbb{P}_T^0$, provides a natural finite-sample analogue to the asymptotic Palm probability, denoted by
$\mathbb{P}_T^0$, provides a natural finite-sample analogue to the asymptotic Palm probability, denoted by  $\mathbb{P}_0$. Probabilities under the finite-time Palm measure are conditioned on a system failure event occurring within the interval
$\mathbb{P}_0$. Probabilities under the finite-time Palm measure are conditioned on a system failure event occurring within the interval  $[0, T]$.
$[0, T]$.
The finite-time Palm-based transition importance of component  $i$ is defined as follows:
$i$ is defined as follows:
 \begin{align}I_i^{(T)}(T)
&=
\mathbb{P}_T^0 \left(
X_i(0^-)=1,\; X_i(0)=0
\right)
\nonumber\\
&=
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t^-)=1,\; X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.\end{align}
\begin{align}I_i^{(T)}(T)
&=
\mathbb{P}_T^0 \left(
X_i(0^-)=1,\; X_i(0)=0
\right)
\nonumber\\
&=
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t^-)=1,\; X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.\end{align} The finite-time Palm-based state importance of component  $i$ is given by:
$i$ is given by:
 \begin{align}I_i^{(S)}(T)
&=
\mathbb{P}_T^0 \left(
X_i(0)=0
\right)
\nonumber\\
&=
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.\end{align}
\begin{align}I_i^{(S)}(T)
&=
\mathbb{P}_T^0 \left(
X_i(0)=0
\right)
\nonumber\\
&=
\frac{
\mathbb{E} \left[
\int_0^T
\mathbf{1}_{\{X_i(t)=0\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.\end{align}3.4. Remarks on the proposed framework
A key advantage of the proposed framework lies in its unified probabilistic formulation: the definitions of the transition-based importance  $I_i^{(T)}$ and the state-based importance
$I_i^{(T)}$ and the state-based importance  $I_i^{(S)}$ remain identical regardless of whether the system is repairable, nonrepairable, or governed by complex phase-mission dynamics. This unified formulation provides a common probabilistic language for component importance analysis across reliability models that are traditionally treated separately.
$I_i^{(S)}$ remain identical regardless of whether the system is repairable, nonrepairable, or governed by complex phase-mission dynamics. This unified formulation provides a common probabilistic language for component importance analysis across reliability models that are traditionally treated separately.
The essential distinction between  $I_i^{(T)}$ and
$I_i^{(T)}$ and  $I_i^{(S)}$ lies not in the underlying system type, but in the evaluation criterion: failure transitions versus failure states. This distinction is particularly significant in repairable systems. A state-based importance measure may assign high importance to components with long repair times or low availability, even when their failure states rarely coincide with system failure events. In contrast, the transition-based measure identifies component failures that are directly synchronized with system-level failures.
$I_i^{(S)}$ lies not in the underlying system type, but in the evaluation criterion: failure transitions versus failure states. This distinction is particularly significant in repairable systems. A state-based importance measure may assign high importance to components with long repair times or low availability, even when their failure states rarely coincide with system failure events. In contrast, the transition-based measure identifies component failures that are directly synchronized with system-level failures.
In nonrepairable systems, the Palm probability, denoted by  $\mathbb{P}_0$, reduces to conditioning on the unique system failure event. Even in this setting, however, the transition- and state-based measures capture different aspects of component importance. Transition-based importance
$\mathbb{P}_0$, reduces to conditioning on the unique system failure event. Even in this setting, however, the transition- and state-based measures capture different aspects of component importance. Transition-based importance  $I_i^{(T)}$ quantifies the probability that the failure transition of component
$I_i^{(T)}$ quantifies the probability that the failure transition of component  $i$ occurs at the system failure epoch. Therefore, it has a direct causal interpretation closely related to Birnbaum-type importance. In contrast, the state-based importance
$i$ occurs at the system failure epoch. Therefore, it has a direct causal interpretation closely related to Birnbaum-type importance. In contrast, the state-based importance  $I_i^{(S)}$ represents the probability that component
$I_i^{(S)}$ represents the probability that component  $i$ is in a failed state when the system fails. This reflects failure involvement rather than causal criticality. The state-based measure is related to classical FV importance, defined as a time-based conditional probability evaluated at a fixed mission time [Reference Fussell8]. While FV importance conditions on the system state at a predetermined time,
$i$ is in a failed state when the system fails. This reflects failure involvement rather than causal criticality. The state-based measure is related to classical FV importance, defined as a time-based conditional probability evaluated at a fixed mission time [Reference Fussell8]. While FV importance conditions on the system state at a predetermined time,  $I_i^{(S)}$ conditions on system failure events via the Palm probability. Thus, it can be interpreted as an event-based generalization of FV importance applicable to repairable, nonstationary, and phase-mission systems.
$I_i^{(S)}$ conditions on system failure events via the Palm probability. Thus, it can be interpreted as an event-based generalization of FV importance applicable to repairable, nonstationary, and phase-mission systems.
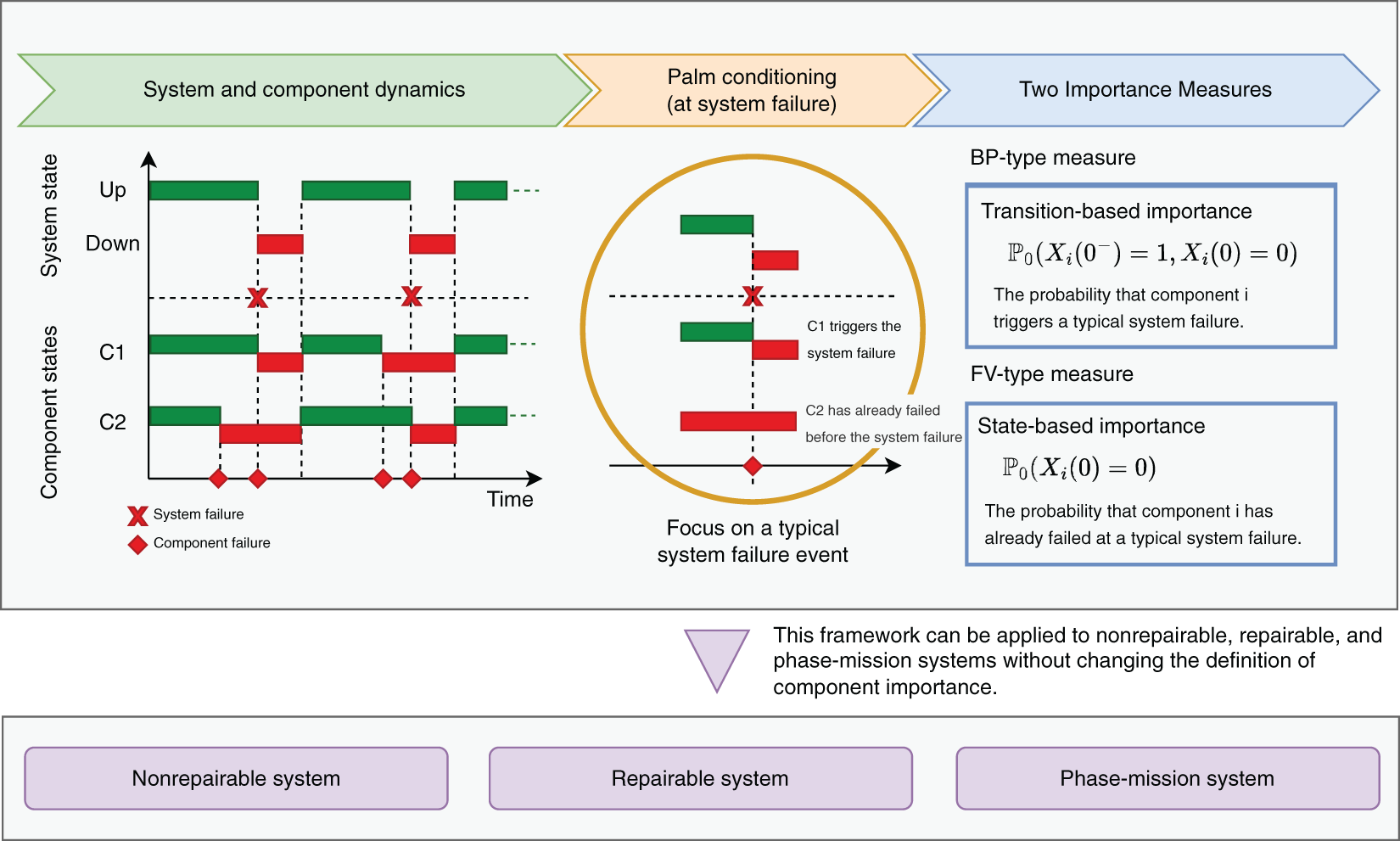
Graphical illustration of the proposed Palm-based framework for failure-event-based component importance measures. The figure visualizes system and component dynamics around a typical system failure event ( $t=0$), and highlights the distinction between transition-based and state-based importance.
$t=0$), and highlights the distinction between transition-based and state-based importance.

1 Long description
The image illustrates a Palm-based framework for failure-event-based component importance measures. It includes three main sections: 'System and component dynamics,' 'Palm conditioning (at system failure),' and 'Two Importance Measures.' The system dynamics section shows a graph with system states labeled 'Up' and 'Down,' and component states 'C1' and 'C2' over time. System failures are marked with 'X,' and component failures with diamonds. 'C1 triggers system failure' and 'C2 has already failed before the system failure' are noted. The importance measures section describes BP-type and FV-type measures. BP-type measure is 'Transition-based importance,' indicating the probability that component i triggers a typical system failure. FV-type measure is 'State-based importance,' indicating the probability that component i has already failed at a typical system failure. The framework can be applied to nonrepairable, repairable and phase-mission systems without changing the definition of component importance.
Figure 1 provides a graphical overview of the proposed Palm-based framework and its key conceptual elements. The time axis is aligned such that  $t=0$ corresponds to a typical system failure event. The transition-based importance
$t=0$ corresponds to a typical system failure event. The transition-based importance  $I_i^{(T)}$ captures the probability of a failure transition of component
$I_i^{(T)}$ captures the probability of a failure transition of component  $i$ occurring at this epoch, while the state-based importance
$i$ occurring at this epoch, while the state-based importance  $I_i^{(S)}$ captures the probability that component
$I_i^{(S)}$ captures the probability that component  $i$ is in a failed state at this epoch.
$i$ is in a failed state at this epoch.
4. Nonrepairable systems and classical importance measures
This section provides a baseline interpretation of the proposed Palm-based importance measures in nonrepairable systems, where classical failure-event-based importance measures are well established. In particular, we clarify how the Palm-based framework introduced in Section 3 recovers and unifies well-known classical measures. This baseline plays a key role in the overall structure of the paper.
In the subsequent sections, we demonstrate that the same definitions of transition-based and state-based importance extend naturally to repairable systems and phase-mission systems without modification, despite their more complex system dynamics. Rather than introducing entirely new indices, our objective is to establish precise mathematical correspondences between classical importance measures and the proposed Palm-based measures  $I_i^{(T)}$ and
$I_i^{(T)}$ and  $I_i^{(S)}$.
$I_i^{(S)}$.
4.1. Transition-based importance
Transition-based importance measures quantify the causal contribution of component-level failure transitions to system failure events. These measures explicitly focus on failure transitions and are naturally formulated under the event-based Palm probability  $\mathbb{P}_0$.
$\mathbb{P}_0$.
Proposition 4.1. (Equivalence to BP importance)
Consider a nonrepairable coherent system that experiences a single irreversible system failure. Let  $T_S$ denote the system failure time and
$T_S$ denote the system failure time and  $T_i$ the failure time of component
$T_i$ the failure time of component  $i$. The Palm-based transition importance
$i$. The Palm-based transition importance
 \begin{equation}
I_i^{(T)}
=
\mathbb{P}_0 \left(
X_i(0^-)=1,\; X_i(0)=0
\right)
\end{equation}
\begin{equation}
I_i^{(T)}
=
\mathbb{P}_0 \left(
X_i(0^-)=1,\; X_i(0)=0
\right)
\end{equation}coincides with the BP importance, i.e.,  $I_i^{(T)} = \mathbb{P}(T_i = T_S)$.
$I_i^{(T)} = \mathbb{P}(T_i = T_S)$.
Proof. In a nonrepairable system, the system failure process  $N$ is a single-point process with
$N$ is a single-point process with  $N(\mathbb{R}_+) = 1$ almost surely, and its unique event time is
$N(\mathbb{R}_+) = 1$ almost surely, and its unique event time is  $T_S$. Using the representation of the Palm-based measure as a time-average, we have:
$T_S$. Using the representation of the Palm-based measure as a time-average, we have:
 \begin{equation}
I_i^{(T)} = \mathbb{E} \left[ \int_0^\infty \mathbf{1}_{\{X_i(t^-)=1, \, X_i(t)=0\}} N(\mathrm{d}t) \right],
\end{equation}
\begin{equation}
I_i^{(T)} = \mathbb{E} \left[ \int_0^\infty \mathbf{1}_{\{X_i(t^-)=1, \, X_i(t)=0\}} N(\mathrm{d}t) \right],
\end{equation}where the denominator  $\mathbb{E}[N(\infty)] = 1$. Since the integral with respect to
$\mathbb{E}[N(\infty)] = 1$. Since the integral with respect to  $N$ is simply the evaluation at the unique jump time
$N$ is simply the evaluation at the unique jump time  $T_S$, this reduces to:
$T_S$, this reduces to:
 \begin{equation}
I_i^{(T)} = \mathbb{E} \left[ \mathbf{1}_{\{X_i(T_S^-)=1, \, X_i(T_S)=0\}} \right] = \mathbb{P}(X_i(T_S^-)=1, \, X_i(T_S)=0).
\end{equation}
\begin{equation}
I_i^{(T)} = \mathbb{E} \left[ \mathbf{1}_{\{X_i(T_S^-)=1, \, X_i(T_S)=0\}} \right] = \mathbb{P}(X_i(T_S^-)=1, \, X_i(T_S)=0).
\end{equation} In a nonrepairable system, component  $i$ can only transition from
$i$ can only transition from  $1$ to
$1$ to  $0$ at its unique failure time
$0$ at its unique failure time  $T_i$. Therefore, the event that this transition occurs exactly at the system failure time
$T_i$. Therefore, the event that this transition occurs exactly at the system failure time  $T_S$ is equivalent to the event
$T_S$ is equivalent to the event  $\{T_i = T_S\}$. Thus, we obtain:
$\{T_i = T_S\}$. Thus, we obtain:
 \begin{equation}
I_i^{(T)} = \mathbb{P}(T_i = T_S),
\end{equation}
\begin{equation}
I_i^{(T)} = \mathbb{P}(T_i = T_S),
\end{equation}which is precisely the definition of the BP importance.
The relationship to the well-known Birnbaum importance can also be clarified. Birnbaum importance is defined at the level of the system structure and evaluates component criticality with respect to a given system state [Reference Birnbaum and Krishnaiah4]. In reliability analysis, this concept is typically evaluated probabilistically by averaging the system state distribution at a specified time. The BP importance can then be interpreted as an integration of Birnbaum-type criticality over the system’s lifetime. From this perspective, the Palm-based transition importance  $I_i^{(T)}$ naturally represents an event-based aggregation of Birnbaum importance, where component criticality is explicitly evaluated at the moment of system failure.
$I_i^{(T)}$ naturally represents an event-based aggregation of Birnbaum importance, where component criticality is explicitly evaluated at the moment of system failure.
4.2. State-based importance
State-based importance measures evaluate component importance through their failure states observed at the system failure epoch. Within the proposed framework,
 \begin{equation}
I_i^{(S)}
=
\mathbb{P}_0 \left(
X_i(0)=0
\right)
\end{equation}
\begin{equation}
I_i^{(S)}
=
\mathbb{P}_0 \left(
X_i(0)=0
\right)
\end{equation}represents the probability that component  $i$ is in a failed state when the system fails, regardless of whether its failure directly triggered the system failure event.
$i$ is in a failed state when the system fails, regardless of whether its failure directly triggered the system failure event.
In nonrepairable systems, the state-based importance  $I_i^{(S)}$ is closely related to the classical FV importance [Reference Fussell8]. FV importance is traditionally defined as a conditional probability evaluated at a fixed mission time. When this mission time coincides with the system failure time
$I_i^{(S)}$ is closely related to the classical FV importance [Reference Fussell8]. FV importance is traditionally defined as a conditional probability evaluated at a fixed mission time. When this mission time coincides with the system failure time  $T_S$, the FV importance of component
$T_S$, the FV importance of component  $i$ is exactly equal to the Palm-based state importance:
$i$ is exactly equal to the Palm-based state importance:
 \begin{equation}
I_i^{(S)} = P(X_i(T_S) = 0 | N(T_S) = 1).
\end{equation}
\begin{equation}
I_i^{(S)} = P(X_i(T_S) = 0 | N(T_S) = 1).
\end{equation} Thus,  $I_i^{(S)}$ can be interpreted as an event-based formulation of FV importance in which the conditioning time is determined by the occurrence of the system failure event.
$I_i^{(S)}$ can be interpreted as an event-based formulation of FV importance in which the conditioning time is determined by the occurrence of the system failure event.
The distinction between transition-based and state-based importance is clear:  $I_i^{(T)}$ requires component
$I_i^{(T)}$ requires component  $i$ to fail at the system failure epoch, while
$i$ to fail at the system failure epoch, while  $I_i^{(S)}$ only requires component
$I_i^{(S)}$ only requires component  $i$ to have failed by that epoch. Consequently, in nonrepairable systems,
$i$ to have failed by that epoch. Consequently, in nonrepairable systems,  $I_i^{(S)} \ge I_i^{(T)}$ always holds.
$I_i^{(S)} \ge I_i^{(T)}$ always holds.
4.3. Discussion
The above correspondences show that the Palm-based framework provides a unified probabilistic interpretation for both transition-based and state-based component importance measures in nonrepairable systems. While these two measures reduce, respectively, to classical Birnbaum / BP and FV importance concepts in this setting, their distinction becomes significantly more consequential in repairable and phase-mission systems. In such systems, a component with a long repair time may exhibit high state-based importance because it is frequently failed when system failures occur, even if its failure transitions rarely coincide with system failure events. The Palm-based formulation preserves this conceptual clarity across all system types by evaluating component importance explicitly at system failure epochs.
5. Repairable systems
In contrast to the baseline interpretation established for nonrepairable systems in Section 4, we now consider repairable systems, where system failure events may occur repeatedly over time. Nevertheless, the Palm-based definitions introduced in Section 3 remain unchanged.
In repairable systems, failure is not a terminal event, and component states can change multiple times between occurrences of failure. Consequently, classical time- or availability-based importance measures, which depend on fixed-time evaluations or long-run state averages, cannot consistently characterize component-level contributions to individual system failure events.
Palm conditioning with respect to system failure events provides a natural event-based probabilistic framework for defining component importance in this setting. By conditioning directly on failure epochs, component importance can be evaluated consistently at each failure event, independently of repair dynamics or long-run availability effects. The resulting framework preserves the distinction between transition-based and state-based importance measures, while extending their definitions to repairable systems without modification.
The Palm-based importance measures defined above apply to general repairable systems without requiring Markovian assumptions. For concreteness, we illustrate these measures using a repairable system whose dynamics are modeled by a continuous-time Markov chain. This Markovian formulation is adopted solely for analytical convenience and to illustrate computability, and is not required by the proposed Palm-based definitions.
Let  $\{X_S(t)\}_{t \ge 0}$ denote the system state process, taking values in a finite state space
$\{X_S(t)\}_{t \ge 0}$ denote the system state process, taking values in a finite state space  $\mathcal{S}$. The system is operational in states belonging to
$\mathcal{S}$. The system is operational in states belonging to  $\mathcal{S}_O \subset \mathcal{S}$ and failed in states belonging to
$\mathcal{S}_O \subset \mathcal{S}$ and failed in states belonging to  $\mathcal{S}_F = \mathcal{S} \setminus \mathcal{S}_O$. The process
$\mathcal{S}_F = \mathcal{S} \setminus \mathcal{S}_O$. The process  $\{X_S(t)\}$ is assumed to be a continuous-time Markov chain with generator matrix
$\{X_S(t)\}$ is assumed to be a continuous-time Markov chain with generator matrix  $Q$. Let
$Q$. Let  $D_1$ denote the transition rate matrix corresponding to transitions from operational to failed states.
$D_1$ denote the transition rate matrix corresponding to transitions from operational to failed states.
Using this formulation, the Palm-based transition importance of component  $i$ is given by
$i$ is given by
 \begin{align}I_i^{(T)}
&=
\mathbb{P}_0 \left(
X_S(0^-) \in \mathcal{S}_O^{(i)},\; X_S(0) \in \mathcal{S}_F^{(i)}
\right), \nonumber\\
&=
\frac{
\mathbb{E} \left[
\int_0^\infty
\mathbf{1}_{\{X_S(t^-) \in \mathcal{S}_O^{(i)},\; X_S(t) \in \mathcal{S}_F^{(i)}\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(\infty)]
},\end{align}
\begin{align}I_i^{(T)}
&=
\mathbb{P}_0 \left(
X_S(0^-) \in \mathcal{S}_O^{(i)},\; X_S(0) \in \mathcal{S}_F^{(i)}
\right), \nonumber\\
&=
\frac{
\mathbb{E} \left[
\int_0^\infty
\mathbf{1}_{\{X_S(t^-) \in \mathcal{S}_O^{(i)},\; X_S(t) \in \mathcal{S}_F^{(i)}\}}
\, N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(\infty)]
},\end{align}where  $\mathcal{S}_O^{(i)}$ and
$\mathcal{S}_O^{(i)}$ and  $\mathcal{S}_F^{(i)}$ denote the subsets of system states in which component
$\mathcal{S}_F^{(i)}$ denote the subsets of system states in which component  $i$ is operational and failed, respectively. Let
$i$ is operational and failed, respectively. Let  $D_1^{(i)}$ denote the sub-transition rate matrix corresponding to system-failure transitions that are accompanied by a failure transition of component
$D_1^{(i)}$ denote the sub-transition rate matrix corresponding to system-failure transitions that are accompanied by a failure transition of component  $i$. That is, for
$i$. That is, for  $s, r \in \mathcal{S}$, the
$s, r \in \mathcal{S}$, the  $(s,r)$-th element of
$(s,r)$-th element of  $D_1^{(i)}$ is defined as
$D_1^{(i)}$ is defined as
 \begin{equation*}
D_1^{(i)}(s,r)= \begin{cases}
Q(s,r) & \text{if } s \in \mathcal{S}_O^{(i)} \text{and } r \in \mathcal{S}_F^{(i)}, \\
0 & \text{otherwise}.
\end{cases}
\end{equation*}
\begin{equation*}
D_1^{(i)}(s,r)= \begin{cases}
Q(s,r) & \text{if } s \in \mathcal{S}_O^{(i)} \text{and } r \in \mathcal{S}_F^{(i)}, \\
0 & \text{otherwise}.
\end{cases}
\end{equation*}Then, under stationarity, we have
 \begin{equation}
I_i^{(T)}
=
\frac{\boldsymbol{\pi} D_1^{(i)} \mathbf{1}}
{\boldsymbol{\pi} D_1 \mathbf{1}},
\end{equation}
\begin{equation}
I_i^{(T)}
=
\frac{\boldsymbol{\pi} D_1^{(i)} \mathbf{1}}
{\boldsymbol{\pi} D_1 \mathbf{1}},
\end{equation}where  $\boldsymbol{\pi}$ is the stationary distribution of
$\boldsymbol{\pi}$ is the stationary distribution of  $X_S(t)$, and
$X_S(t)$, and  $\mathbf{1}$ is a vector of ones. Equation (21) provides a practical means of evaluating the transition-based importance in Markovian repairable systems.
$\mathbf{1}$ is a vector of ones. Equation (21) provides a practical means of evaluating the transition-based importance in Markovian repairable systems.
Similarly, in this context, the Palm-based state importance of component  $i$ is given by
$i$ is given by
 \begin{equation}
I_i^{(S)} = \frac{\boldsymbol{\pi} D_1 \mathbf{f}_i}{\boldsymbol{\pi} D_1 \mathbf{1}},
\end{equation}
\begin{equation}
I_i^{(S)} = \frac{\boldsymbol{\pi} D_1 \mathbf{f}_i}{\boldsymbol{\pi} D_1 \mathbf{1}},
\end{equation}where  $\mathbf{f}_i$ for system states in which component
$\mathbf{f}_i$ for system states in which component  $i$ is failed.
$i$ is failed.
Remark 5.1. (Extension to marked point process models)
The above Markovian formulation is introduced solely for concreteness. The Palm-based transition- and state-based importance measures do not rely on the Markov property and extend naturally to general marked point process models of system failure events. In such models, system failures are represented by a point process whose events carry marks indicating the components that fail at each event. The sub-transition matrices  $D_1$ and
$D_1$ and  $D_1^{(i)}$ can then be interpreted as intensity measures associated with unmarked and
$D_1^{(i)}$ can then be interpreted as intensity measures associated with unmarked and  $i$-marked failure events, respectively. Under stationarity, the transition- and state-based importance measures retain the same ratio form as in Eq. (21), with
$i$-marked failure events, respectively. Under stationarity, the transition- and state-based importance measures retain the same ratio form as in Eq. (21), with  $\boldsymbol{\pi} D_1 \mathbf{1}$ replaced by the total failure intensity and
$\boldsymbol{\pi} D_1 \mathbf{1}$ replaced by the total failure intensity and  $\boldsymbol{\pi} D_1^{(i)} \mathbf{1}$ by the intensity of failure events marked by component
$\boldsymbol{\pi} D_1^{(i)} \mathbf{1}$ by the intensity of failure events marked by component  $i$.
$i$.
6. Phase-mission systems
In contrast to the baseline interpretation for nonrepairable systems (Section 4) and the extension to repairable systems (Section 5), we now consider phase-mission systems (PMS), which introduce additional structural and temporal complexity due to phase-dependent system configurations.
In PMS, the system structure, component failure mechanisms, and success criteria may vary across successive mission phases, and failure events exhibit strong time dependence. Consequently, classical time-averaged or fixed-time importance measures often fail to capture failure-event-based component criticality in such nonstationary settings.
Nevertheless, the Palm-based definitions remain unchanged. By conditioning on mission failure events, component importance can be defined in a unified event-based manner without redefining the underlying importance concept for each phase. Phase-dependent importance measures are obtained by further conditioning on the phase in which a typical failure event occurs, enabling consistent evaluation of component criticality across heterogeneous mission phases.
Let the mission consist of  $K$ successive phases with deterministic switching times
$K$ successive phases with deterministic switching times  $0=t_0 \lt t_1 \lt \cdots \lt t_K=T$. System failure is defined as the failure to complete the mission, and let
$0=t_0 \lt t_1 \lt \cdots \lt t_K=T$. System failure is defined as the failure to complete the mission, and let  $N(t)$ denote the point process of mission failure events over the finite time horizon
$N(t)$ denote the point process of mission failure events over the finite time horizon  $[0,T]$. Within the proposed framework, Palm conditioning with respect to
$[0,T]$. Within the proposed framework, Palm conditioning with respect to  $N(t)$ is defined in the same manner as for nonrepairable and repairable systems. No phase-specific Palm measure is introduced. Instead, the mission phase at which a failure occurs is treated as a mark associated with each mission failure event.
$N(t)$ is defined in the same manner as for nonrepairable and repairable systems. No phase-specific Palm measure is introduced. Instead, the mission phase at which a failure occurs is treated as a mark associated with each mission failure event.
The finite-time Palm-based transition-based importance of component  $i$ over the entire mission duration is defined as
$i$ over the entire mission duration is defined as
 \begin{equation}
I_i^{(T)}(T)
=
\frac{
\mathbb{E}\!\left[
\int_0^T
\mathbf{1}_{\{X_i(t^-)=1,\,X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation}
\begin{equation}
I_i^{(T)}(T)
=
\frac{
\mathbb{E}\!\left[
\int_0^T
\mathbf{1}_{\{X_i(t^-)=1,\,X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation} This quantity represents the Palm probability that component  $i$ experiences a failure transition at a typical mission failure event. Similarly, the finite-time Palm-based state-based importance is defined as
$i$ experiences a failure transition at a typical mission failure event. Similarly, the finite-time Palm-based state-based importance is defined as
 \begin{equation}
I_i^{(S)}(T)
=
\frac{
\mathbb{E}\!\left[
\int_0^T
\mathbf{1}_{\{X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation}
\begin{equation}
I_i^{(S)}(T)
=
\frac{
\mathbb{E}\!\left[
\int_0^T
\mathbf{1}_{\{X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}[N(T)]
}.
\end{equation} This quantity represents the Palm probability that component  $i$ is in a failed state at a typical mission failure event, regardless of whether its failure transition is causally responsible for that event. These definitions are identical in form to those for nonrepairable and repairable systems, and remain well defined even when mission phases exhibit different structures or failure characteristics.
$i$ is in a failed state at a typical mission failure event, regardless of whether its failure transition is causally responsible for that event. These definitions are identical in form to those for nonrepairable and repairable systems, and remain well defined even when mission phases exhibit different structures or failure characteristics.
A distinctive feature of PMS is that mission failure events may occur in different mission phases. Let  $K(t)\in\{1,\dots,K\}$ denote the phase index associated with a mission failure event occurring at time
$K(t)\in\{1,\dots,K\}$ denote the phase index associated with a mission failure event occurring at time  $t$. Phase-specific importance measures are obtained by conditioning on this phase mark under the Palm measure. The phase-specific Palm-based transition-based importance of component
$t$. Phase-specific importance measures are obtained by conditioning on this phase mark under the Palm measure. The phase-specific Palm-based transition-based importance of component  $i$ in phase
$i$ in phase  $k$ is defined as
$k$ is defined as
 \begin{equation}
I_i^{(T,k)}
=
\mathbb{P}^0\!\left(
X_i(0^-)=1,\;X_i(0)=0
\,|\,
K(0)=k
\right).
\end{equation}
\begin{equation}
I_i^{(T,k)}
=
\mathbb{P}^0\!\left(
X_i(0^-)=1,\;X_i(0)=0
\,|\,
K(0)=k
\right).
\end{equation}This quantity admits the following equivalent representation:
 \begin{equation}
I_i^{(T,k)}
=
\frac{
\mathbb{E}\!\left[
\int_{t_{k-1}}^{t_k}
\mathbf{1}_{\{X_i(t^-)=1,\,X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}\!\left[
N\big((t_{k-1},t_k]\big)
\right]
}.
\end{equation}
\begin{equation}
I_i^{(T,k)}
=
\frac{
\mathbb{E}\!\left[
\int_{t_{k-1}}^{t_k}
\mathbf{1}_{\{X_i(t^-)=1,\,X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}\!\left[
N\big((t_{k-1},t_k]\big)
\right]
}.
\end{equation} Here, the conditioning event  $\{K=k\}$ implicitly includes the requirement that the mission successfully completes all preceding phases, which is a fundamental characteristic of nonrepairable phase-mission systems.
$\{K=k\}$ implicitly includes the requirement that the mission successfully completes all preceding phases, which is a fundamental characteristic of nonrepairable phase-mission systems.
Similarly, the phase-specific Palm-based state-based importance of component  $i$ in phase
$i$ in phase  $k$ is defined as
$k$ is defined as
 \begin{equation}
I_i^{(S,k)}
=
\mathbb{P}^0\!\left(
X_i(0)=0
\,|\,
K(0)=k
\right)
=
\frac{
\mathbb{E}\!\left[
\int_{t_{k-1}}^{t_k}
\mathbf{1}_{\{X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}\!\left[
N\big((t_{k-1},t_k]\big)
\right]
}.
\end{equation}
\begin{equation}
I_i^{(S,k)}
=
\mathbb{P}^0\!\left(
X_i(0)=0
\,|\,
K(0)=k
\right)
=
\frac{
\mathbb{E}\!\left[
\int_{t_{k-1}}^{t_k}
\mathbf{1}_{\{X_i(t)=0\}}
\,N(\mathrm{d}t)
\right]
}{
\mathbb{E}\!\left[
N\big((t_{k-1},t_k]\big)
\right]
}.
\end{equation}These phase-specific measures enable component criticality to be evaluated conditionally on the mission phase in which failure occurs, capturing the time-dependent and structure-dependent nature of component importance in nonstationary missions.
7. Numerical illustration
This example is intended to provide a practical illustration of how the proposed Palm-based importance measures can be interpreted and applied in a concrete system setting.
7.1. System description
We consider a repairable system consisting of three components arranged in a 2-out-of-3 configuration. Each component alternates between the operational and failed states and is modeled as an independent two-state continuous-time Markov process. For component  $i$, failures occur with rate
$i$, failures occur with rate  $\lambda_i$ and repairs occur with rate
$\lambda_i$ and repairs occur with rate  $\mu_i$. The steady-state availability of component
$\mu_i$. The steady-state availability of component  $i$ is given by
$i$ is given by
 \begin{equation}
A_i = \frac{\mu_i}{\lambda_i + \mu_i}.
\end{equation}
\begin{equation}
A_i = \frac{\mu_i}{\lambda_i + \mu_i}.
\end{equation}The system is operational whenever at least two components are operational and fails when two or more components are in the failed state.
In this numerical illustration, the component failure and repair rates are
 \begin{align*}
(\lambda_1, \mu_1) &= (0.20,\; 5.00), \\
(\lambda_2, \mu_2) &= (0.05,\; 0.50), \\
(\lambda_3, \mu_3) &= (0.01,\; 0.02).
\end{align*}
\begin{align*}
(\lambda_1, \mu_1) &= (0.20,\; 5.00), \\
(\lambda_2, \mu_2) &= (0.05,\; 0.50), \\
(\lambda_3, \mu_3) &= (0.01,\; 0.02).
\end{align*}Component 1 fails relatively frequently but is repaired quickly, component 2 exhibits intermediate behavior, and component 3 fails infrequently but experiences slow repair.
7.2. Availability-based measures
Using the above parameters, the steady-state component availabilities are
 \begin{equation}
A_1 = 0.9615,\quad
A_2 = 0.9091,\quad
A_3 = 0.6667.
\end{equation}
\begin{equation}
A_1 = 0.9615,\quad
A_2 = 0.9091,\quad
A_3 = 0.6667.
\end{equation}Assuming independence, the steady-state availability of a 2-out-of-3 system is
 \begin{equation}
A_S
=
A_1A_2 + A_1A_3 + A_2A_3 - 2A_1A_2A_3 = 0.9557.
\end{equation}
\begin{equation}
A_S
=
A_1A_2 + A_1A_3 + A_2A_3 - 2A_1A_2A_3 = 0.9557.
\end{equation}When the component availabilities are interpreted as effective model parameters, the availability-based Birnbaum importance is defined as
 \begin{equation}
B_i = \frac{\partial A_S}{\partial A_i}.
\end{equation}
\begin{equation}
B_i = \frac{\partial A_S}{\partial A_i}.
\end{equation}Concretely, for the 2-out-of-3 system, we have
 \begin{align}
B_1 &= A_2 + A_3 - 2A_2A_3 = 0.3636, \nonumber\\
B_2 &= A_1 + A_3 - 2A_1A_3 = 0.3462, \nonumber\\
B_3 &= A_1 + A_2 - 2A_1A_2 = 0.1224.
\end{align}
\begin{align}
B_1 &= A_2 + A_3 - 2A_2A_3 = 0.3636, \nonumber\\
B_2 &= A_1 + A_3 - 2A_1A_3 = 0.3462, \nonumber\\
B_3 &= A_1 + A_2 - 2A_1A_2 = 0.1224.
\end{align}These values quantify the effect of improving component availability on instantaneous system availability and thus reflect a performance-oriented notion of importance.
7.3. Palm-based measures
Using the Markovian formulation described in Section 5, we compute the Palm-based transition- and state-based importance measures.
The transition-based Palm importance
 \begin{equation}
I_i^{(T)} = \mathbb{P}_0\!\left(X_i(0^-)=1,\,X_i(0)=0\right)
\end{equation}
\begin{equation}
I_i^{(T)} = \mathbb{P}_0\!\left(X_i(0^-)=1,\,X_i(0)=0\right)
\end{equation}represents the probability that a typical system failure event is triggered by the failure transition of component  $i$. For the above parameters, we obtain
$i$. For the above parameters, we obtain
 \begin{equation}
I_1^{(T)} = 0.8086,\quad
I_2^{(T)} = 0.1819,\quad
I_3^{(T)} = 0.0094.
\end{equation}
\begin{equation}
I_1^{(T)} = 0.8086,\quad
I_2^{(T)} = 0.1819,\quad
I_3^{(T)} = 0.0094.
\end{equation}These results indicate that component 1 dominates system failure triggering, while component 3 rarely causes system failure transitions despite its relatively low availability.
The state-based Palm importance
 \begin{equation}
I_i^{(S)} = \mathbb{P}_0\!\left(X_i(0)=0\right)
\end{equation}
\begin{equation}
I_i^{(S)} = \mathbb{P}_0\!\left(X_i(0)=0\right)
\end{equation}represents the probability that component  $i$ is in the failed state at a typical system failure epoch. The resulting values are
$i$ is in the failed state at a typical system failure epoch. The resulting values are
 \begin{equation}
I_1^{(S)} = 0.8248,\quad
I_2^{(S)} = 0.3235,\quad
I_3^{(S)} = 0.8518.
\end{equation}
\begin{equation}
I_1^{(S)} = 0.8248,\quad
I_2^{(S)} = 0.3235,\quad
I_3^{(S)} = 0.8518.
\end{equation}Component 3 exhibits the highest state-based importance, reflecting its frequent involvement in system failure states due to its slow repair rate. Note that the state-based importances do not sum to one, since multiple components may simultaneously be failed at a system failure epoch.
7.4. Discussion
This numerical example highlights the fundamentally different questions addressed by the three importance measures. The availability-based Birnbaum importance identifies components whose improvement most increases instantaneous system availability, favoring components 1 and 2. The transition-based Palm importance identifies components that trigger system failure events, clearly singling out component 1, which is similar to the BP importance in nonrepairable systems discussed in Section 4. The state-based Palm importance identifies components that are involved in system failures by being failed at failure epochs, emphasizing component 3.
These differences arise from distinct conditioning principles: performance sensitivity versus event-conditioned failure analysis. While availability-based importance measures remain useful for performance-oriented optimization, they do not constitute failure-event-based importance measures in repairable systems. For failure analysis and failure-driven decision making, the transition-based Palm importance provides a natural and consistent alternative.
8. Conclusion
This paper proposed a Palm-based framework for failure-event-based component importance measures uniformly applicable to nonrepairable systems, repairable systems, and phase-mission systems. By defining component importance through Palm conditioning with respect to system failure events, a common probabilistic formulation was established without relying on restrictive assumptions such as renewal structures, stationarity, or Markovian dynamics.
In this framework, component importance measures were systematically classified into transition-based and state-based importance. Transition-based importance measures capture the contribution of component failure transitions to system failure events and were shown to recover classical Birnbaum and BP-type importance measures as special cases. State-based importance measures, by contrast, quantify component failure involvement through failure states observed at system failure epochs and were shown to provide a natural event-based interpretation of FV importance. This taxonomy clarifies why classical importance measures diverge in repairable systems and which conditioning principle each measure implicitly adopts.
The applicability of the proposed framework was demonstrated across nonrepairable systems, repairable systems, and phase-mission systems. In repairable systems, Palm conditioning enables component importance to be evaluated consistently at repeated failure events, independently of repair dynamics or long-run availability effects. In phase-mission systems, finite-time Palm measures and phase-conditioned importance indices provide a transparent way to account for nonstationarity and phase-dependent system structures, without redefining the underlying importance concept for each phase. An important implication of the proposed framework concerns the role of classical time-conditioned importance measures in repairable systems. Availability-based Birnbaum importance quantifies the effect of component availability on instantaneous system performance and therefore addresses a performance-oriented optimization problem. However, because it is not conditioned on system failure events, it should not be interpreted as a failure-event-based importance measure in repairable systems. By contrast, the proposed transition-based Palm importance provides a consistent failure-event-based alternative that directly characterizes the components responsible for system failure events, while recovering Birnbaum-type interpretations in nonrepairable systems.
The proposed framework offers a mathematically rigorous yet conceptually simple basis for failure-event-based component importance analysis, clarifying which classical importance concepts remain applicable and which are naturally replaced in repairable and nonstationary systems. The proposed framework also admits several natural generalizations. In particular, it can be extended to multi-state systems, systems with dependent components, and more general stochastic models beyond point processes, without altering the fundamental Palm-based construction.
Several directions for future research naturally arise. First, the framework can be extended to multi-state systems, in which components and systems operate at multiple performance or degradation levels. Such extensions can be handled by replacing binary component states with multi-valued state functions or by introducing marked point process formulations. Second, further investigation of computational aspects is warranted. Efficient numerical evaluation methods based on continuous-time Markov chains, marked point process models, or simulation-based Palm estimation will enhance the practical applicability of the proposed measures to large-scale and complex systems. Finally, the integration of Palm-based event-conditioned importance measures with data-driven reliability models, including condition monitoring and degradation data, represents a promising direction for future work. Such developments would further strengthen the role of event-based component importance analysis in modern reliability and safety engineering applications.
Competing interests
The authors declare no competing interests.


 Open access
Open access