


More than half the world’s population lives less than 3 km from freshwater (Kummu et al. Reference Kummu, Hans, Philip J. and Olli2011), and more than one-third reside within 100 km of a coastline. Coastal, riverine, and lacustrine margins have always been critical habitats for humanity (Menotti Reference Menotti2012; Van de Noort and O’Sullivan Reference Van de Noort and Aidan O’Sullivan2006). As such, the anthropogenic and environmental data preserved along littoral margins hold key insights into the shifting density and dynamics of human socio-ecological systems (Refulio-Coronado et al. Reference Refulio-Coronado, Katherine, Tracey, Austin, Suchandra, Hirotsugu and Emi2021). However, these cultural and environmental repositories are often challenging to identify, investigate, and interpret because of the many constraints imposed by the dynamic littoral zone.
Water itself presents a barrier to the many tools that are used effectively on land. In particular, the inability of radio signals used by global navigation satellite systems (GNSS) to penetrate through water, along with the challenges faced by optically based survey systems, limits the use of core terrestrial survey techniques or else necessitates their adaptation. At deeper depths, ultrashort baseline (USBL) systems developed to track marine surveys effectively link GNSS with sonar to bridge above and below water (Luo et al. Reference Luo, Yan, Chunyu, Chen and Luo2021); however, these systems often struggle in shallow and complex environments. Hence, although technologies for deepwater surveys have developed at pace (Ballard et al. Reference Ballard, McCann, Yoerger, Whitcomb, Mindell, Oleson and Singh2000; Drap et al. Reference Drap, Seinturier, Hijazi, Merad, Boi, Chemisky, Seguin and Long2015; Igbinenikaro et al. Reference Igbinenikaro, Adekoya and Etukudoh2024; Pacheco-Ruiz et al. Reference Pacheco-Ruiz, Adams, Pedrotti, Grant, Holmlund and Bailey2019), very shallow water remains a significant survey challenge. The region often described as the “white ribbon,” extending from the minimum operating depth of marine geophysical equipment up to the dry margin, frequently represents a “no data” zone (Carvalho et al. Reference Carvalho, Hamylton and Woodroffe2017).
This article reports an applied workflow developed over 10 years of work in Scottish freshwater lochs. It details an underwater photogrammetry approach for extreme shallows (ca. 1 m to the surface) that can achieve accuracy and internal control comparable to drone-derived datasets. By combining stereophotogrammetry, which enables automatic calibration through the creation of artificial scale bars during processing, with real-time kinematic (RTK) GNSS-derived ground control points (GCPs), we were able to record underwater datasets that align with those produced on land.
This method builds on established underwater photogrammetry practices (Drap Reference Drap and Silva2012; McCarthy and Benjamin Reference McCarthy and Benjamin2014; Pacheco-Ruiz et al. Reference Pacheco-Ruiz, Adams and Pedrotti2018) but adapts them to a freshwater context, for which intertidal and deepwater techniques are unsuitable. The contribution of this research is applied: it demonstrates how accessible tools and established principles can be combined into a practical, repeatable workflow for extreme shallows. We emphasize the importance of a complete digital workflow—from pre- to postprocessing—alongside data collection, highlighting how each stage contributes to the creation of outputs ranging from high-accuracy elevation models to visually engaging 3D representations. By quantifying performance and validating accuracy against terrestrial standards, the method provides a low-cost, field-deployable framework that helps bridge the persistent white ribbon gap in littoral surveys.
Challenges of Shallow-Water Surveying
The difficulties of surveying in shallow water have long been recognized, with numerous efforts made to mitigate their effects. Early pioneers in maritime archaeology, such as Bass (Reference Bass1966, Reference Bass, Peter, Joan, J. B., Alan R. and Hans-Günter1967) and Muckelroy (Reference Muckelroy1978), sought to overcome the challenges of working underwater by adapting terrestrial methods. Using traditional tapes, levels, and later theodolites, their efforts laid the groundwork for more advanced underwater recording. Since then, technological developments—including SCUBA, remote sensing (e.g., side-scan sonar, swath bathymetry), and robotics (e.g., remotely operated vehicles and autonomous surface vessels) have vastly expanded access to underwater environments (Catsambis et al. Reference Catsambis, Ford and Hamilton2011; Drap et al. Reference Drap, Seinturier, Hijazi, Merad, Boi, Chemisky, Seguin and Long2015; Green Reference Green2016). These tools now enable extensive surveys in deeper water, supporting the documentation of both natural habitats and archaeological sites (Kapelonis et al. Reference Kapelonis, Chatzigeorgiou, Ntoumas, Grigoriou, Pettas, Michelinakis and Correia2025; Pacheco-Ruiz et al. Reference Pacheco-Ruiz, Adams, Pedrotti, Grant, Holmlund and Bailey2019; Ventura et al. Reference Ventura, Grosso, Pensa, Casoli, Mancini, Valente, Scardi and Rakaj2023). However, many of these systems require minimum operating depths or extensive prior data for mission planning. As such, they are often ineffective in extremely shallow or nearshore contexts, particularly those that cross the land–water divide (Benjamin and Hale Reference Benjamin and Alex2012; Benjamin et al. Reference Benjamin, McCarthy, Wiseman, Bevin, Kowlessar, Astrup, Naumann, Hacker, McCarthy, Benjamin, Winton and van Duivenvoorde2019).
Attempts to address this white ribbon zone have included lidar bathymetry and hybrid approaches combining lidar with other datasets (e.g., side-scan, multi-beam, RTK-GPS) to model nearshore topography (Bicket et al. Reference Bicket, Mellett, Tizzard and Waddington2017; Carvalho et al. Reference Carvalho, Hamylton and Woodroffe2017; Guyot et al. Reference Guyot, Lennon, Thomas, Gueguen, Petit, Lorho, Cassen and Hubert-Moy2019; Kotilainen and Kaskela Reference Kotilainen and Kaskela2017; Leon et al. Reference Leon, Phinn, Hamylton and Saunders2013). Lidar bathymetry remains a promising tool, offering a single platform capable of spanning both terrestrial and aquatic environments (Wang et al. Reference Wang, Xing, He, Yu, Xu and Li2022). In ideal conditions, green lidar can penetrate depths of up to 30 m, but this depends on low turbidity, minimal vegetation, and a highly reflective substrate (Szafarczyk and Toś Reference Szafarczyk and Toś2023). Combined with high costs and limited accessibility, these constraints have hindered the development and use of these sensors for shallow-water archaeological contexts.
Among available techniques for detailed optical survey—including laser scanning and total stations—photogrammetry stands out for its accessibility, adaptability, and potential precision. It can deliver highly accurate and reliable datasets using diverse equipment configurations across a wide range of conditions (Fulton et al. Reference Fulton, Viduka, Hutchison, Hollick, Woods, Sewell and Manning2016; McCarthy et al. Reference McCarthy, Benjamin, Winton and van Duivenvoorde2019; Nocerino and Menna Reference Nocerino, Menna, Gruen, Troyer, Capra, Castagnetti, Rossi, Brooks, Schmitt and Holbrook2020; Pacheco-Ruiz et al. Reference Pacheco-Ruiz, Adams, Pedrotti, Grant, Holmlund and Bailey2019; Teague and Scott Reference Teague and Scott2017; Wright et al. Reference Wright, Conlin and Shope2020). Its value as a core method for underwater recording is well established (Drap Reference Drap and Silva2012; McCarthy and Benjamin Reference McCarthy and Benjamin2014; Mufti et al. Reference Mufti, Helmholz, Belton, Allahvirdi-Zadeh and Parnum2024), and more recent work has focused on ways to link photogrammetric datasets across terrestrial and aquatic environments (Benjamin et al. Reference Benjamin, McCarthy, Wiseman, Bevin, Kowlessar, Astrup, Naumann, Hacker, McCarthy, Benjamin, Winton and van Duivenvoorde2019; Karaki et al. Reference Karaki, Ferrando, Federici and Sguerso2025; Pulido Mantas et al. Reference Pulido Mantas, Roveta, Calcinai, di Camillo, Gambardella, Gregorin and Coppari2023).
However, although aerial photogrammetry can penetrate shallow water under ideal conditions, its accuracy is highly variable. David and colleagues (Reference David, Kohl, Casella, Rovere, Ballesteros and Schlurmann2021) demonstrate that optical distortion limits the reliability of submerged surface reconstructions from aerial imagery, making it unsuitable where precise georeferencing is required. Del Savio and coworkers (Reference Del Savio, Torres, Vergara Olivera, Llimpe Rojas, Urday Ibarra and Neckel2023) further show that accuracy deteriorates rapidly beyond 1 m of water depth. Thus, although aerial imagery can complement other data sources, it cannot replace direct underwater measurement when subcentimeter accuracy is needed.
Alternative approaches in intertidal contexts have used aerial and underwater photogrammetry during opposing tidal cycles, conducting diver-deployed surveys at high tide and RTK-GPS or UAV surveys at low tide (Benjamin et al. Reference Benjamin, McCarthy, Wiseman, Bevin, Kowlessar, Astrup, Naumann, Hacker, McCarthy, Benjamin, Winton and van Duivenvoorde2019; Karaki et al. Reference Karaki, Ferrando, Federici and Sguerso2025). Although effective in tidal environments, such methods cannot be applied to inland lakes or other nontidal settings. As a result, data acquisition in extremely shallow water remains underdeveloped, especially where terrestrial-level precision is required.
Shallow-water environments also present a confluence of complicating factors (Figure 1). Surveyors must contend with choppy surfaces, suspended particles, fine sediments, and aquatic vegetation—all of which interfere with camera stability, image overlap, and transect spacing. Although these challenges may occur in any underwater setting (Loureiro et al. Reference Loureiro, Dias, Almeida, Martins, Hong and Silva2024; Massot-Campos et al. Reference Massot-Campos, Bonin-Font, Guerrero-Font, Martorell-Torres, Abadal, Muntaner-Gonzalez, Miquel Nordfeldt-Fiol, Oliver-Codina, Cappelletto and Thornton2023; Russo et al. Reference Russo, Del Pizzo, Di Ciaccio and Troisi2023), they are amplified in shallow water by light distortion. In deeper environments, lighting can be controlled to improve image quality (Drap et al. Reference Drap, Seinturier, Hijazi, Merad, Boi, Chemisky, Seguin and Long2015; McCarthy and Benjamin Reference McCarthy and Benjamin2014). In contrast, shallow surveys rely on variable natural light. On sunny days, refraction and reflection at the water’s surface create caustics—moving light patterns that ripple across the loch bed—that introduce visual noise. Even moderate surface motion can exacerbate these effects, making it difficult to achieve accurate, high-resolution imagery. Although the preferred solution is to wait for calmer conditions (Benjamin et al. Reference Benjamin, McCarthy, Wiseman, Bevin, Kowlessar, Astrup, Naumann, Hacker, McCarthy, Benjamin, Winton and van Duivenvoorde2019), this is not always practical. Additional controls are therefore required to maintain reliable image alignment and model accuracy when ideal conditions cannot be achieved.
Examples of challenges to image alignment in shallow water: (A) homogeneous fine-grained loch-bed sediments with limited texture;, (B) homogeneous surfaces partially obscured by vegetation and silting; (C) dense vegetation with significant movement, preventing reliable reconstruction; (D) shallow-water caustics producing dynamic illumination patterns that disrupt image consistency.

Crannog Case Study
Our research centers on a Neolithic crannog in Loch Bhorgastail, Isle of Lewis, Scotland, using the extensive fieldwork undertaken at this site as a case study in method development and application (Figure 2). There are hundreds of crannogs, or artificial islands, dispersed throughout the many inland waterbodies of Scotland and Ireland. Dating from the Neolithic through to the medieval period, these sites constitute a diverse archaeological resource with exceptional potential for both cultural and environmental research. Straddling the boundary between land and water, they preserve complex stratigraphies that offer key insights into past occupations and changing hydrological landscapes. Compared to the more dynamic conditions of coasts, estuaries, and rivers, the lacustrine environments that host most of the crannogs provide relatively stable and controllable conditions for fieldwork. Indeed, crannogs—and the many comparable sites across Europe—have long played a central role in the development of maritime, underwater, and wetland archaeology (e.g., Blundell Reference Blundell1909, Reference Blundell1910; Dixon Reference Dixon2004; Menotti Reference Menotti2012; Muckelroy Reference Muckelroy1978, Reference Muckelroy1980; Reich et al. Reference Reich, Steiner, Ballmer, Emmenegger, Hostettler, Stäheli and Naumov2021). Building on these traditions and their close ties to emerging technologies and techniques, we have spent the past decade developing and refining a suite of methods for surveying and recording crannogs as part of a broader research program (Blankshein et al. Reference Blankshein, Garrow and Sturt2022, Reference Blankshein, Garrow and Sturt2024; Garrow and Sturt Reference Garrow and Sturt2019a, Reference Garrow and Sturt2019b; Garrow et al. Reference Garrow, Fraser and Mike2017).
Aerial view of the Loch Bhorgastail crannog, illustrating the site context and land–water interface in which integrated terrestrial and underwater survey methods are applied.

As work progressed over several field seasons, the survey aims evolved from establishing a basic understanding of the site’s form and extent to producing highly detailed photogrammetric models of stratigraphy exposed during excavation. The resulting datasets needed to support a range of objectives: creating 3D models for stakeholder dissemination, generating plans and sections for excavation recording, and providing high-precision data for object identification, interpretation, and analysis. These varied demands necessitated a method that was reliable, adaptable, reasonably rapid, and able to produce low-resolution but visually engaging outputs for public audiences alongside high-resolution, accurate datasets for scientific analysis.
As excavation advanced, it quickly became apparent that the terrestrial and underwater components formed a single continuous structure spanning both environments and could not be treated separately. Thus, it became increasingly important that the underwater survey could be directly compared to the terrestrial and aerial datasets used to record the island itself. The ability to match these models spatially and metrically was essential for generating integrated site plans and understanding the structural relationships between the island’s submerged layers and its above-water features. Over two seasons, our methods expanded and increased in precision to meet these requirements, progressing from broad site documentation to the detailed metric recording suitable for scientific analysis.
Loch Bhorgastail provided a rare opportunity to develop, test, and refine a workflow capable of achieving terrestrial-grade accuracy underwater. The site demonstrates the potential of shallow-water archaeology to bridge the land–water interface while elevating the precision and reliability of underwater recording. By showing that underwater datasets can meet terrestrial accuracy standards, this work promotes more consistent interpretation across environments and deepens our understanding of these liminal sites and the enduring human relationships they embody.
Materials and Methods
From the outset, we aimed to establish a fully born-digital workflow—a documentation process that is digital from the point of capture—that would be capable of operating seamlessly across terrestrial and underwater contexts. Following a growing body of research demonstrating the superior accuracy and efficiency of born-digital methods over traditional hand recording (Badillo et al. Reference Badillo, Matthew R., Aaron M., Stephen P. and Allison L. C.2024; De Reu et al. Reference De Reu, Plets, Verhoeven, De Smedt, Bats, Cherretté and De Maeyer2013, Reference De Reu, De Smedt, Herremans, Van Meirvenne, Laloo and De Clercq2014; Koenig et al. Reference Koenig, Willis and Black2017; Magnani et al. Reference Magnani, Douglass, Schroder, Reeves and Braun2020) while meeting the logistical challenges of working on and around a small island, we implemented this approach across all surveys. Integrating the underwater and terrestrial workflows required careful attention to differences in survey extent, timing, resolution, and vertical precision while maintaining consistent recording standards across environments.
For underwater recording, achieving datasets comparable to terrestrial surveys required ensuring internal precision while maintaining positional accuracy suitable for geospatial integration. Because GNSS signals cannot penetrate water, several strategies have been developed to overcome this limitation. For instance, Karaki and coworkers (Reference Karaki, Ferrando, Federici and Sguerso2025) tracked a snorkeler’s movement using UAV timestamp synchronization, whereas Benjamin and colleagues (Reference Benjamin, McCarthy, Wiseman, Bevin, Kowlessar, Astrup, Naumann, Hacker, McCarthy, Benjamin, Winton and van Duivenvoorde2019) and Pulido Mantas and others (Reference Pulido Mantas, Roveta, Calcinai, di Camillo, Gambardella, Gregorin and Coppari2023) combined diver-deployed and aerial surveys across opposing tidal cycles to link intertidal datasets. Yamafune and coworkers (Reference Yamafune, Torres and Castro2017) and Nocerino and colleagues (Reference Nocerino, Menna, Gruen, Troyer, Capra, Castagnetti, Rossi, Brooks, Schmitt and Holbrook2020) demonstrated the effectiveness of coded scale bars and fixed seabed targets for internal precision where absolute control is limited, whereas Menna and others (Reference Menna, Erica, Bertrand, Fabio and Pierre2021) introduced redundant scaling and leveling via integrated pressure sensors. Most recently, Calantropio and Chiabrando (Reference Calantropio and Chiabrando2024) validated the integration of RTK-derived control points in shallow-water photogrammetry, confirming the feasibility of achieving highly accurate co-registration between terrestrial and aquatic datasets.
Building on these developments, we adapted established photogrammetric practice—in which georeferenced GCPs guide alignment, scaling, and quality assurance (Cowley et al. Reference Cowley, Moriarty, Geddes, Brown, Wade and Nichol2018; Liu et al. Reference Liu, Lian, Yang, Wang, Han and Zhang2022; Sanz-Ablanedo Reference Sanz-Ablanedo, Chandler, Rodríguez-Pérez and Ordóñez2018)—to an extremely shallow underwater context. RTK-derived GCPs were installed in situ within the enclosed setting of Loch Bhorgastail, enabling efficient and repeatable georeferencing across two field seasons. Our workflow combined a stereoscopic capture strategy with RTK-anchored control, delivering terrestrial-grade alignment with the efficiency and repeatability required for excavation-level recording.
Equipment
Table 1 summarizes the equipment used across the terrestrial and underwater surveys. For terrestrial photogrammetry, we employed an uncrewed aerial system (UAS) comprising a UAV fitted with a high-resolution camera and integrated GPS, operating in conjunction with a fixed RTK base station. This configuration enabled the capture of aerial imagery with high spatial fidelity and immediate positional correction.
Equipment and Software Used for Terrestrial and Underwater Photogrammetry Surveys and GNSS Data Acquisition.

Underwater, the need for a lightweight, adaptable, and reliable system led to the use of a dual-camera setup equipped with GoPro Hero 9 cameras (Figure 3). As noted by Pacheco-Ruiz et alia (Reference Pacheco-Ruiz, Adams and Pedrotti2018), GoPros offer a wide field of view, robust low-light performance, and a compact design well suited to close-proximity surveys. Mounting two cameras on a fixed 29 cm baseline allowed the precise control of overlap and introduced an intrinsic digital scale bar during processing, thereby improving registration accuracy even under variable lighting and turbidity.
Stereo camera rig used for shallow-water image acquisition, showing the fixed camera baseline (29 cm) and optional central mounting point.

We initially trialed a Nikon Z7 II DSLR with a wide-angle lens in an underwater housing, which produced excellent image quality but proved impractical in shallow water. The restricted depth required tight survey-line spacing, and the bulky housing reduced maneuverability and neutral buoyancy, limiting efficiency and consistency. The smaller, neutrally weighted GoPro rig proved far more stable and comfortable to handle, enabling smoother image acquisition and consistent data quality.
Although the stereo setup doubled the number of images and storage requirements, the trade-off proved worthwhile. The approach produced dense, reliable datasets suitable for integration with the UAS surveys, establishing the stereophotogrammetry rig as an ideal solution for shallow-water contexts requiring rapid, high-resolution recording.
Data Acquisition
Initial underwater surveys aimed to capture the overall form and extent of the site across an area of approximately 25 × 25 m (Garrow and Sturt Reference Garrow and Sturt2019a, Reference Garrow and Sturt2019b). These early campaigns quickly revealed the principal challenges of shallow-water photogrammetry: maintaining consistent survey paths, ensuring image coverage, and mitigating the effects of light distortion, suspended sediment, and surface motion. When conducted on snorkel, even minor surface movement made it difficult to stabilize the camera and maintain even line spacing, issues that were compounded by the proximity of archaeological features and reflective substrates.
It therefore became clear that recording the excavation itself would require greater precision, reliability, and consistency. To achieve this, synchronized time-lapse cameras captured paired images every three seconds, introducing automatic scale bars between left–right image pairs and improving resolution and accuracy. The fixed 29 cm baseline enhanced spatial control, increased the likelihood of successful image alignment, and reduced the influence of variable water conditions.
Accurate georeferencing was achieved using RTK-GNSS anchored GCPs affixed to a metal grid supporting the underwater excavation (Figure 4). Two pre-drilled holes in each grid foot were surveyed with a Leica RTK GNSS operating in OSGB36, providing fixed reference positions across all campaigns. This arrangement offered both increased positional reliability and duplicate points for independent accuracy checks. Although including terrestrial GCPs in underwater imagery is rarely feasible, we reversed the approach by extending underwater GCPs above the surface using vertical metal rods. These markers were visible in both underwater and aerial imagery, improving cross-environment alignment and reducing positional bias from optical distortion (David et al. Reference David, Kohl, Casella, Rovere, Ballesteros and Schlurmann2021; Nocerino and Menna Reference Nocerino and Menna2020). The combination of stereophotogrammetry and RTK-referenced control produced rapid, repeatable, and high-accuracy results across two excavation seasons.
Ground control points used for UAS and underwater surveys at Loch Bhorgastail, showing the distribution of terrestrial, underwater, and rope-mounted control points across the land–water interface.

After the 2021 excavation was completed, a larger-scale campaign was undertaken to assess the scalability of the workflow. The broader site area (ca. 25 × 25 m) was divided into discrete sectors using ropes radiating from the island’s edge into the loch, forming a spiderweb-like grid (see Figure 4). GNSS-derived control points were distributed along these ropes to maintain consistent spatial referencing and to enable accurate merging of the resulting models. Although not analyzed in detail here, this large-scale survey confirmed that the stereo-capture and RTK-referenced approach could be efficiently extended beyond trench-level recording to capture complete site morphologies with comparable repeatability and spatial fidelity. When water movement prevented stable still imaging, we used additional contingency strategies, such as video capture with still-frame extraction. This flexible, field-deployable workflow proved effective not only at Loch Bhorgastail but also offers a transferable model for other shallow-water environments facing similar challenges.
Data Processing
All imagery was first imported into Adobe Lightroom CC for color correction before photogrammetric processing. To ensure consistency, the GoPro’s auto white balance was disabled during capture, allowing batch adjustments to be applied across each dataset. Initial corrections were performed using Lightroom’s automatic white balance tool, followed by the manual refinement of contrast, shadows, texture, and haze as required. These adjustments were essential for maintaining visual consistency between surveys throughout the excavation and for preserving color distinctions between archaeological materials and contexts (Figure 5).
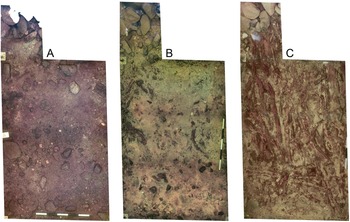
Stratigraphic phases identified within the 2021 underwater trench: (A) pre-excavation loch-bed deposits; (B) thin yellow–orange clay deposit interpreted as in-washing; (C) roundwood interspersed with a dark silty deposit, interpreted as degraded packwerk and embedded within gray, silty, quartz-rich sands. Scale bar = 1 m.

Image files were then renamed to match left and right camera pairs using the following convention: site name, date, camera position (left or right), and sequential number (e.g., BHO040721_right_001, BHO040721_left_001). This system facilitated automated batch processing, accurate pairing, and long-term archiving.
Underwater photogrammetry models were processed in Agisoft Metashape. A custom prealignment script introduced artificial scale bars based on the known 29 cm baseline between the stereo cameras (see https://doi.org/10.5284/1100101). These scale bars provided strong internal spatial control, improving registration accuracy and reducing processing time. Models were processed first, using the stereopairs and scale bars for alignment and precision, before the GCPs were incorporated.
Dense cloud generation was prioritized in all cases because it provided the precision required by our born-digital workflow. Confidence values were used to identify and filter outliers, enhancing both analytical accuracy and visual clarity while reducing file size without compromising spatial fidelity. All derivative products—including meshes, digital elevation models (DEMs), and orthomosaics—were generated from the cleaned dense clouds to maintain full spatial accuracy for subsequent GIS analysis (Table 2). For public dissemination, we used reduced dense clouds or smoothed meshes to produce lightweight watertight models while retaining high-resolution textures.
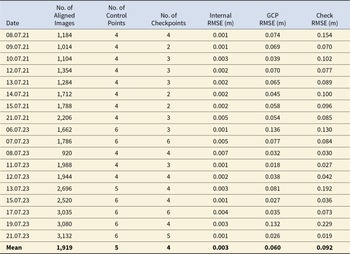
Statistical Results from Each Underwater Photogrammetry Survey, Showing Internal, GCP, and Checkpoint RMSE Values.

Each survey was processed independently, without using GCPs, and later merged using RTK-derived GCPs. Aerial datasets were processed in DJI Terra, which integrates POS data for each image to enhance camera calibration and registration accuracy. Locational information was added after the initial models were processed. The resulting dense clouds were imported into Metashape for integration with the underwater datasets. Color discrepancies between wet and dry environments often hindered automated alignment. To resolve this, we used shared markers visible in both datasets—specifically, the vertical rods extending from the underwater GCPs—to provide cross-environment reference points. This approach substantially improved the precision of final model alignment, enabling accurate co-registration of aerial and underwater data for composite site analysis.
Statistical Evaluation
Each survey incorporated a robust control network tailored to its method and spatial extent. Although the underwater survey area was smaller, it included a greater number of GCPs than the aerial surveys, ensuring precise georeferencing across the submerged zone. Each underwater survey incorporated a minimum of eight RTK-surveyed GCPs, arranged in four sets at the corners of the excavation grid. As the excavation expanded, additional GCPs were added, with up to 24 distributed across the site for georeferencing and validation.
These duplicate points provided contingency when single GCPs became obscured and enabled their use for independent validation. In practice, the rigors of excavation and variable environmental conditions occasionally covered points with sediment or equipment, reducing their visibility in certain image sets. Consequently, the number of controls used for optimization and validation varied between models. For this study, all accuracy assessments were based on independent checks to ensure genuine external validation. A minimum of four GCPs were used for georeferencing, with at least half the number of georeferencing points reserved for validation, where possible.
Root mean square error (RMSE) values were derived directly from Agisoft Metashape, representing mean residuals for internal alignment (pre-GCP optimization) and ground control (post-GCP optimization). These results are summarized in Table 2, along with the number of aligned images, control points, and checks used for each survey conducted during the 2021 and 2023 field seasons. Despite variations in conditions, the internal accuracy of the surveys remained high (1–5 mm). Although locational accuracy ranged from 2 to 14 cm, the standard deviation remained relatively low (ca. 50%–60%), indicating strong repeatability of the method across varying environmental conditions.
When benchmarked against Historic England’s (2024) precision standards, the internal accuracy of the underwater models (±3 mm) meets the tolerance expected for 1:20-scale survey and compares favorably with most reported values for underwater photogrammetry (e.g., Agrafiotis et al. Reference Agrafiotis, Skarlatos, Forbes, Poullis, Skamantzari and Georgopoulos2018; Calantropio and Chiabrando Reference Calantropio and Chiabrando2024; Drap et al. Reference Drap, Seinturier, Hijazi, Merad, Boi, Chemisky, Seguin and Long2015; Menna et al. Reference Menna, Erica, Bertrand, Fabio and Pierre2021; Pacheco-Ruiz et al. Reference Pacheco-Ruiz, Adams and Pedrotti2018; Yamafune et al. Reference Yamafune, Torres and Castro2017): these results reflect the exceptionally high geometric consistency achieved through stereophotogrammetry. The external (georeferenced) accuracy of ±60 mm aligns with 1:200 scale tolerances, consistent with the inherent challenges of GNSS-denied environments.
Table 3 summarizes the mean and standard deviation of RMSE values for the underwater (UW) surveys compared with UAS error values (calculated in DJI Terra). These results further highlight the strong internal precision of the stereophotogrammetry results, considering that the underwater surveys covered considerably smaller areas. Together, these findings demonstrate that although absolute positioning remains constrained by environmental factors, the internal structure of the models attains terrestrial quality, providing reliable data for both analytical and visual applications. The data’s vertical and horizontal precision likewise support detailed digitization and analysis. The consistently low standard deviations across all models confirm the repeatability of each workflow. Collectively, these results demonstrate that the stereophotogrammetry method achieves terrestrial-level internal precision and externally reliable accuracy, enabling confident integration of underwater and aerial datasets for composite spatial analyses and interpretation.
Mean and Standard Deviation (SD) RMSE Values for UAV and Underwater (UW) Photogrammetry Surveys, Including Internal and GCP-Based Accuracy Metrics and Derived Surface Precision.

Results and Discussion
Having established the accuracy and repeatability of both datasets (Table 2), we examine in this section the broader interpretive and methodological outcomes of the integrated workflow. The surveys were intentionally designed to serve multiple objectives from detailed excavation recording to the creation of textured 3D models for analysis and public engagement. The resulting datasets capture the site across multiple scales, from microlevel stratigraphy to landscape context, enabling both precise scientific analysis and accessible visualization. Rather than producing a single definitive record, the workflow generated a suite of complementary datasets that together provide a layered understanding of the site’s form, development, and broader environmental context.
Orthomosaics and DEMs were imported into ArcGIS Pro for spatial analysis and digitization, forming the basis for plan drawings (Figure 6) and temporal phase comparisons. These datasets could be overlapped or combined, supporting high-resolution temporal and structural analysis. Digitized sections were generated using 3D meshes in Metashape, with profiles extracted from DEMs and augmented by RTK-derived coordinates, field drawings, and excavation notes. The resulting cross sections revealed the full depth and construction sequence of the crannog, offering perspectives unattainable through conventional documentation methods (Figure 7).
Plan view of stone and timber elements above and below the waterline, digitized from multiple integrated photogrammetry survey datasets.

Cross section illustrating above- and below-water contexts at Loch Bhorgastail, generated from photogrammetry-derived 3D models and digital elevation profiles, integrated with hand-drawn stratigraphic sections.

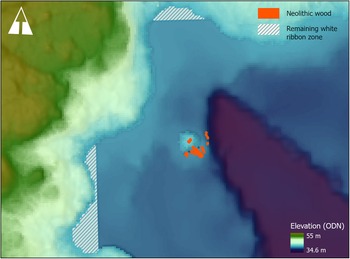
Incorporating the larger-scale underwater mapping conducted in 2021 situates the structure within its wider setting, producing a pseudo-bathymetric reconstruction. When integrated with geophysical datasets (including dual-frequency echosounder and side-scan sonar; see Garrow and Sturt Reference Garrow and Sturt2019b), this model provides new insight into the site’s underwater topography and the probable extent of the Neolithic timber platform (Figure 8).
Full extent of the site revealed through integrated UAS photogrammetry, underwater stereophotogrammetry, and dual-frequency echosounder surveys. Hatched areas indicate portions of the white ribbon zone where data coverage remains incomplete relative to areas successfully integrated within the study area.

In addition to its analytical value, the workflow supported a range of dissemination and engagement outputs from academic illustrations to interactive public exhibits (see https://crannogs.soton.ac.uk/dissemination/). The ability to derive both broad landscape data and detailed stratigraphic information from a single, integrated workflow demonstrates the potential of photogrammetry to bridge methodological and disciplinary divides. This approach offers a scalable and replicable model for investigating human interaction with inland waterbodies, extending from site-specific excavation to regional-scale interpretation.
Conclusion
The workflow developed through this project demonstrates that high-precision, repeatable underwater photogrammetry can be achieved at terrestrial-grade accuracy using accessible, field-deployable methods. By combining UAS and stereophotogrammetry, we bridged the persistent white ribbon between land and water, enabling consistent spatial integration and interpretation across environments. Although challenges remain—including vegetation interference, reflective substrates, and the fusion of overlapping models—they are outweighed by the workflow’s efficiency, adaptability, and reproducibility.
This low-cost and accessible method, tailored to the extreme shallows, directly addresses long-standing challenges in surveying this liminal zone. Through the integration of stereophotogrammetry, artificial scale bars, and RTK-GNSS data, we achieved precision and accuracy comparable to UAS surveys while maintaining efficiency and repeatability. Crucially, this level of precision enabled seamless integration with high-resolution aerial datasets, producing unified 3D models that capture both the terrestrial and submerged components of the site.
The resulting 3D models, DEMs, and orthomosaics facilitate detailed spatial analysis and visualization across the land–water interface, deepening understanding of construction, stratigraphy, and long-term site development. Although full integration without vertical or spatial mismatch will ultimately depend on simultaneous multi-platform capture, this study demonstrates a practical and effective means of achieving near-continuous coverage. By providing a replicable framework for recording at the water’s edge, it advances both the technical and interpretive frontiers of shallow-water archaeology, strengthening the bridge between terrestrial and aquatic approaches.
Acknowledgments
This research would not have been possible without the dedicated work of our field team, whose commitment made possible the surveys and excavations at Loch Bhorgastail. We also thank Kevin Murphy at Comhairle nan Eilean Siar (Western Isles Council Archaeology Service) and colleagues at Historic Environment Scotland for their continued support. We gratefully acknowledge the local community and crofting association for their permission and support. Finally, we would like to thank the anonymous reviewers for their constructive comments and valuable insights, which helped refine this article. No statutory permits were required for the research described here.
Funding Statement
The work presented in this article was generously funded by the Arts and Humanities Research Council (AH/S010157/1).
Data Availability Statement
Data generated during this research, along with the code used for processing stereophotogrammetry, are archived and available via the Archaeology Data Service (ADS; https://doi.org/10.5284/1100101).
Competing Interests
The authors declare no competing interests.









 Open access
Open access