





1. Introduction
Random connection models (RCMs) are random graph models in which the vertex set is a Poisson point process on some ambient space (with an intensity parameter
 $\lambda>0$
), and the edges then exist independently with a probability that is prescribed by an adjacency function,
$\lambda>0$
), and the edges then exist independently with a probability that is prescribed by an adjacency function,
 $\varphi$
, that depends upon the positions of the two vertices in question. Marked RCMs are RCMs for which the ambient space is the product of an infinite space (say Euclidean
$\varphi$
, that depends upon the positions of the two vertices in question. Marked RCMs are RCMs for which the ambient space is the product of an infinite space (say Euclidean
 $\mathbb R^d$
or hyperbolic
$\mathbb R^d$
or hyperbolic
 ${\mathbb{H}^d}$
) with a probability space
${\mathbb{H}^d}$
) with a probability space
 $\mathcal E$
of marks. The adjacency function naturally depends on these marks, and this ensures that not all vertices behave in the same way (as they might well in a purely very symmetric ambient space). The primary aim of this paper is to prove marked RCMs on
$\mathcal E$
of marks. The adjacency function naturally depends on these marks, and this ensures that not all vertices behave in the same way (as they might well in a purely very symmetric ambient space). The primary aim of this paper is to prove marked RCMs on
 ${\mathbb{H}^d}\times \mathcal E$
exhibit a non-uniqueness phase, in which there are almost surely infinitely many infinite clusters. Specifically, we show in Theorem 2.1 that in a certain ‘stretched-out’ regime the percolation critical intensity
${\mathbb{H}^d}\times \mathcal E$
exhibit a non-uniqueness phase, in which there are almost surely infinitely many infinite clusters. Specifically, we show in Theorem 2.1 that in a certain ‘stretched-out’ regime the percolation critical intensity
 $\lambda_{\mathrm{c}}$
(above which infinite components exist) and the uniqueness critical intensity
$\lambda_{\mathrm{c}}$
(above which infinite components exist) and the uniqueness critical intensity
 $\lambda_{\mathrm{u}}$
(above which there is a unique infinite component) satisfy
$\lambda_{\mathrm{u}}$
(above which there is a unique infinite component) satisfy
 \begin{equation} \lambda_{\mathrm{c}} < \lambda_{\mathrm{u}}.\end{equation}
\begin{equation} \lambda_{\mathrm{c}} < \lambda_{\mathrm{u}}.\end{equation}
Notably, this ‘stretched-out’ regime is not the ‘spread-out’ regime as seen in the lace expansion arguments of [Reference Heydenreich, van der Hofstad, Last and Matzke22] and [Reference Hara and Slade25]. As we shall see, the approach taken in this paper also helps to derive mean-field critical exponents for such models (see Theorem 2.2). These results are also applied to Boolean disc models (with random radii) and weight-dependent RCMs on
 ${\mathbb{H}^d}$
. In particular, Proposition 2.1 proves the existence of a non-uniqueness regime for some weight-dependent RCMs without requiring the ‘stretched-out’ perturbation. Note that this proposition also proves a non-trivial property for some random graphs that are almost surely not locally finite.
${\mathbb{H}^d}$
. In particular, Proposition 2.1 proves the existence of a non-uniqueness regime for some weight-dependent RCMs without requiring the ‘stretched-out’ perturbation. Note that this proposition also proves a non-trivial property for some random graphs that are almost surely not locally finite.
While it is well known that percolation models on amenable and Euclidean spaces have at most one infinite connected cluster (see, for example, [Reference Grimmett18] and [Reference Meester and Roy32]), by considering
 ${\mathbb{H}^d}$
we can move beyond this and model a non-amenable geometry. It is clear that Bernoulli bond percolation (BBP) on regular trees have a non-uniqueness phase, and Benjamini and Schramm [Reference Benjamini and Schramm6] conjecture that such a phase exists for BBP on any locally finite quasi-transitive non-amenable graph. This background is discussed further in Section 2.4.
${\mathbb{H}^d}$
we can move beyond this and model a non-amenable geometry. It is clear that Bernoulli bond percolation (BBP) on regular trees have a non-uniqueness phase, and Benjamini and Schramm [Reference Benjamini and Schramm6] conjecture that such a phase exists for BBP on any locally finite quasi-transitive non-amenable graph. This background is discussed further in Section 2.4.
There are three main ideas in this paper that allow us to show non-uniqueness. In a similar way to Hutchcroft [Reference Hutchcroft26] we first use the two-point (or connectedness) and adjacency functions to construct operators on
 $L^p$
spaces—in particular the Hilbert space
$L^p$
spaces—in particular the Hilbert space
 $L^2$
. This produces the critical intensity
$L^2$
. This produces the critical intensity
 $\lambda_{2\to 2}$
, at which the
$\lambda_{2\to 2}$
, at which the
 $L^2\to L^2$
operator norm of the two-point operator switches from being finite to infinite. Crucially, this operator critical intensity lies between the susceptibility critical intensity
$L^2\to L^2$
operator norm of the two-point operator switches from being finite to infinite. Crucially, this operator critical intensity lies between the susceptibility critical intensity
 $\lambda_T$
(
$\lambda_T$
(
 $=\lambda_{1\to 1}$
; see Lemma 4.3) and the uniqueness critical intensity
$=\lambda_{1\to 1}$
; see Lemma 4.3) and the uniqueness critical intensity
 $\lambda_{\mathrm{u}}$
:
$\lambda_{\mathrm{u}}$
:
 \begin{equation*} \lambda_{T}\leq \lambda_{2\to 2} \leq \lambda_{\mathrm{u}}.\end{equation*}
\begin{equation*} \lambda_{T}\leq \lambda_{2\to 2} \leq \lambda_{\mathrm{u}}.\end{equation*}
If one could show
 $\lambda_T=\lambda_{\mathrm{c}}$
and that one of these bounds is strict (it will be the lower bound in this argument), then a non-uniqueness phase would be proven. In practice, we find an upper bound on
$\lambda_T=\lambda_{\mathrm{c}}$
and that one of these bounds is strict (it will be the lower bound in this argument), then a non-uniqueness phase would be proven. In practice, we find an upper bound on
 $\lambda_{\mathrm{c}}$
by comparing to a model on which the percolation and susceptibility thresholds are equal—we only prove
$\lambda_{\mathrm{c}}$
by comparing to a model on which the percolation and susceptibility thresholds are equal—we only prove
 $\lambda_T=\lambda_{\mathrm{c}}$
for models in which we also derive mean-field critical exponents. Furthermore,
$\lambda_T=\lambda_{\mathrm{c}}$
for models in which we also derive mean-field critical exponents. Furthermore,
 $\lambda_{2\to 2}$
can be bounded below by the reciprocal of the
$\lambda_{2\to 2}$
can be bounded below by the reciprocal of the
 $L^2\to L^2$
operator norm of the adjacency operator.
$L^2\to L^2$
operator norm of the adjacency operator.
The second main idea is that this
 $L^2\to L^2$
operator norm of the adjacency operator can be written explicitly using the spherical transform of [Reference Helgason20]. Specifically, in the case of unmarked hyperbolic RCMs the
$L^2\to L^2$
operator norm of the adjacency operator can be written explicitly using the spherical transform of [Reference Helgason20]. Specifically, in the case of unmarked hyperbolic RCMs the
 $L^2\to L^2$
operator norm of the adjacency operator is exactly
$L^2\to L^2$
operator norm of the adjacency operator is exactly
 \begin{equation} \int_{{\mathbb{H}^d}}\varphi(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))Q_d\left(\mathrm{dist}_{{\mathbb{H}^d}}(x,o)\right) \mu(\mathrm{d} x),\end{equation}
\begin{equation} \int_{{\mathbb{H}^d}}\varphi(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))Q_d\left(\mathrm{dist}_{{\mathbb{H}^d}}(x,o)\right) \mu(\mathrm{d} x),\end{equation}
where
 $\mathrm{dist}_{{\mathbb{H}^d}}$
is the hyperbolic metric,
$\mathrm{dist}_{{\mathbb{H}^d}}$
is the hyperbolic metric,
 $\mu$
is the hyperbolic measure, and the function
$\mu$
is the hyperbolic measure, and the function
 $Q_d\colon \mathbb R_+\to \mathbb R_+$
is given by an explicit integral in (5.3) (taking
$Q_d\colon \mathbb R_+\to \mathbb R_+$
is given by an explicit integral in (5.3) (taking
 $\mathbb R_+=\left[0,\infty\right)$
). By studying simple properties of
$\mathbb R_+=\left[0,\infty\right)$
). By studying simple properties of
 $Q_d$
, one can show that as
$Q_d$
, one can show that as
 $\varphi$
becomes more stretched out, the integral (1.2) is much smaller than the total mass of
$\varphi$
becomes more stretched out, the integral (1.2) is much smaller than the total mass of
 $\varphi$
(i.e. this same integral without
$\varphi$
(i.e. this same integral without
 $Q_d$
).
$Q_d$
).
The third idea is that a geometric property of
 ${\mathbb{H}^d}$
allows us to use a cluster of the RCM to dominate a branching process, which tells us that the susceptibility critical intensity is bounded above by a constant divided by the total mass of
${\mathbb{H}^d}$
allows us to use a cluster of the RCM to dominate a branching process, which tells us that the susceptibility critical intensity is bounded above by a constant divided by the total mass of
 $\varphi$
. We will have therefore shown that if
$\varphi$
. We will have therefore shown that if
 $\varphi$
is sufficiently stretched out then the susceptibility critical intensity is strictly less than
$\varphi$
is sufficiently stretched out then the susceptibility critical intensity is strictly less than
 $\lambda_{2\to 2}$
, which is less than or equal to the uniqueness critical intensity. The critical intensity
$\lambda_{2\to 2}$
, which is less than or equal to the uniqueness critical intensity. The critical intensity
 $\lambda_{2\to 2}$
has the additional advantage that the triangle diagram can easily be shown to be finite for
$\lambda_{2\to 2}$
has the additional advantage that the triangle diagram can easily be shown to be finite for
 $\lambda<\lambda_{2\to 2}$
, and standard methods then allow us to show mean-field critical exponents hold.
$\lambda<\lambda_{2\to 2}$
, and standard methods then allow us to show mean-field critical exponents hold.
1.1. Outline of the paper
In Section 2 we first present the model and main question more precisely, before giving the main non-uniqueness result of the paper in Theorem 2.1. Theorem 2.2 then gives conditions under which mean-field critical exponents can be proven. In Section 2.3 we apply these theorems to scaled Boolean disc models and weight-dependent hyperbolic RCMs.
Section 3 contains some preliminary information, including more details on hyperbolic spaces and on constructing adjacency and two-point operators.
In Section 4 we see what conclusions we can come to by using operators and operator norms without using significant properties of
 ${\mathbb{H}^d}$
. The main claim here is that we can bound
${\mathbb{H}^d}$
. The main claim here is that we can bound
 $\lambda_{2\to 2}$
below using the
$\lambda_{2\to 2}$
below using the
 $L^2\to L^2$
operator norm of the explicitly known adjacency operator. The
$L^2\to L^2$
operator norm of the explicitly known adjacency operator. The
 $\lambda_{2\to 2}$
critical threshold also has a role in showing that the triangle diagram is finite.
$\lambda_{2\to 2}$
critical threshold also has a role in showing that the triangle diagram is finite.
In Section 5 the spherical transform is used to evaluate the
 $L^2\to L^2$
operator norms. Here the main claim is that as
$L^2\to L^2$
operator norms. Here the main claim is that as
 $L\to\infty$
the spherical transform of the adjacency function and operator is dominated by the plain integral and the associated operator.
$L\to\infty$
the spherical transform of the adjacency function and operator is dominated by the plain integral and the associated operator.
In Section 6.1 it is demonstrated how the
 $L^2\to L^2$
critical threshold acts as a lower bound for the uniqueness threshold, while geometric considerations give an upper bound for the percolation critical threshold in terms of the plain integral of the adjacency function. For sufficiently large L, these bounds we have found are the required way around to demonstrate the existence of the non-uniqueness phase. Section 6.2 then proceeds to show that not only is the triangle diagram finite, but is small enough to use the results of Caicedo and Dickson [Reference Caicedo and Dickson9].
$L^2\to L^2$
critical threshold acts as a lower bound for the uniqueness threshold, while geometric considerations give an upper bound for the percolation critical threshold in terms of the plain integral of the adjacency function. For sufficiently large L, these bounds we have found are the required way around to demonstrate the existence of the non-uniqueness phase. Section 6.2 then proceeds to show that not only is the triangle diagram finite, but is small enough to use the results of Caicedo and Dickson [Reference Caicedo and Dickson9].
The applications of the main results for the Boolean disc model (in Section 7.1) and weight-dependent hyperbolic RCMs (in Section 7.2) are proven in Section 7.
Interactions between scaling functions and adjacency functions are discussed in Appendix A. The volume- and length-linear scaling functions (introduced in Section 2.1) are shown to behave nicely for all adjacency functions, while all scaling functions are shown to behave nicely for some classes of adjacency function. However, some specific pairs of scaling and adjacency function are identified that behave unintuitively.
2. Results
2.1. Presenting the model and the questions
Let us now be more precise in our definition of marked hyperbolic RCMs.
2.1.1. Hyperbolic space.
For
 $d\geq 2$
, the d-dimensional hyperbolic space (denoted
$d\geq 2$
, the d-dimensional hyperbolic space (denoted
 ${\mathbb{H}^d}$
) is the unique simply connected d-dimensional Riemannian manifold with constant sectional curvature
${\mathbb{H}^d}$
) is the unique simply connected d-dimensional Riemannian manifold with constant sectional curvature
 $-1$
. We will often use the Poincaré ball model (sometimes called conformal ball model) of
$-1$
. We will often use the Poincaré ball model (sometimes called conformal ball model) of
 ${\mathbb{H}^d}$
. Let
${\mathbb{H}^d}$
. Let
 $\mathbb{B}=\{x\in\mathbb R^d\colon \lvert {x}\rvert<1\}$
be the open Euclidean radius ball in
$\mathbb{B}=\{x\in\mathbb R^d\colon \lvert {x}\rvert<1\}$
be the open Euclidean radius ball in
 $\mathbb R^d$
. The hyperbolic metric on
$\mathbb R^d$
. The hyperbolic metric on
 $\mathbb{B}$
then assigns length
$\mathbb{B}$
then assigns length
 \begin{equation*} \ell(\gamma) \,:\!=\, 2\int^1_0 \frac{\lvert {\gamma'(t)}\rvert}{1-\lvert {\gamma(t)}\rvert^2}\mathrm{d} t\end{equation*}
\begin{equation*} \ell(\gamma) \,:\!=\, 2\int^1_0 \frac{\lvert {\gamma'(t)}\rvert}{1-\lvert {\gamma(t)}\rvert^2}\mathrm{d} t\end{equation*}
to the curve
 $\gamma=\left\{\gamma(t)\right\}_{t\in[0,1]}$
. In particular, this means that the origin in
$\gamma=\left\{\gamma(t)\right\}_{t\in[0,1]}$
. In particular, this means that the origin in
 $\mathbb{B}$
(denoted o) and an arbitrary point
$\mathbb{B}$
(denoted o) and an arbitrary point
 $x\in \mathbb{B}$
are hyperbolic distance
$x\in \mathbb{B}$
are hyperbolic distance
 \begin{equation} \mathrm{dist}_{{\mathbb{H}^d}}(o,x) = 2\textrm{artanh} \lvert x \rvert\end{equation}
\begin{equation} \mathrm{dist}_{{\mathbb{H}^d}}(o,x) = 2\textrm{artanh} \lvert x \rvert\end{equation}
apart, where
 $\lvert x \rvert$
is the Euclidean distance between o and x in
$\lvert x \rvert$
is the Euclidean distance between o and x in
 $\mathbb R^d$
. For Borel measurable subsets
$\mathbb R^d$
. For Borel measurable subsets
 $E\subset \mathbb{B}$
, the hyperbolic measure (denoted
$E\subset \mathbb{B}$
, the hyperbolic measure (denoted
 $\mu$
) assigns mass
$\mu$
) assigns mass
 \begin{equation*} \mu(E) \,:\!=\, \int_E\frac{4}{\left(1-\lvert {x}\rvert^2\right)^2}\mathrm{d} x.\end{equation*}
\begin{equation*} \mu(E) \,:\!=\, \int_E\frac{4}{\left(1-\lvert {x}\rvert^2\right)^2}\mathrm{d} x.\end{equation*}
In Section 3 below, the isometries of these spaces are described. In particular, they have a transitive family that means that the point identified by o is arbitrary.
2.1.2. Marked hyperbolic RCM.
We first let
 $\mathcal E$
be a Borel measure space with probability measure
$\mathcal E$
be a Borel measure space with probability measure
 $\mathcal P$
. Then, given
$\mathcal P$
. Then, given
 $\lambda>0$
, the vertex set of the marked hyperbolic RCM,
$\lambda>0$
, the vertex set of the marked hyperbolic RCM,
 $\eta$
, is distributed as a Poisson point process on
$\eta$
, is distributed as a Poisson point process on
 ${\mathbb{H}^d}\times \mathcal E$
with intensity measure given by the product measure of the hyperbolic measure and the probability measure:
${\mathbb{H}^d}\times \mathcal E$
with intensity measure given by the product measure of the hyperbolic measure and the probability measure:
 $\lambda\nu \,:\!=\, \lambda\mu\otimes\mathcal P$
. Two distinct vertices then form an edge independently of all other vertices and possible edges with a probability given by a measurable adjacency function
$\lambda\nu \,:\!=\, \lambda\mu\otimes\mathcal P$
. Two distinct vertices then form an edge independently of all other vertices and possible edges with a probability given by a measurable adjacency function
 $\varphi\colon \mathbb R_+\times\mathcal E^2\to [0,1]$
that is symmetric under the transposition of the two mark arguments. Note that throughout we assume that
$\varphi\colon \mathbb R_+\times\mathcal E^2\to [0,1]$
that is symmetric under the transposition of the two mark arguments. Note that throughout we assume that
 $\varphi>0$
on a
$\varphi>0$
on a
 $\textrm{Leb}\otimes \mathcal P\otimes\mathcal P$
-positive set so that some edges do indeed occur. We write the event that two vertices
$\textrm{Leb}\otimes \mathcal P\otimes\mathcal P$
-positive set so that some edges do indeed occur. We write the event that two vertices
 $\mathbf{x},\mathbf{y}\in\eta\subset{\mathbb{H}^d}\times\mathcal E$
form an edge as
$\mathbf{x},\mathbf{y}\in\eta\subset{\mathbb{H}^d}\times\mathcal E$
form an edge as
 $\mathbf{x}\sim\mathbf{y}$
. Given
$\mathbf{x}\sim\mathbf{y}$
. Given
 $x,y\in{\mathbb{H}^d}$
and
$x,y\in{\mathbb{H}^d}$
and
 $a,b\in\mathcal E$
,
$a,b\in\mathcal E$
,
 \begin{equation} \mathbb{P}\left((x,a)\sim(y,b)\right) = \varphi(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b).\end{equation}
\begin{equation} \mathbb{P}\left((x,a)\sim(y,b)\right) = \varphi(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b).\end{equation}
We then use
 $\xi$
to denote the whole random graph, and we use
$\xi$
to denote the whole random graph, and we use
 $\mathbb P_\lambda$
to denote the law of
$\mathbb P_\lambda$
to denote the law of
 $\xi$
(and
$\xi$
(and
 $\mathbb E_{\lambda}$
for the associated expectation). A more precise and complete description of construction of an RCM can be found in [Reference Heydenreich, van der Hofstad, Last and Matzke22], where the reader need only replace instances of
$\mathbb E_{\lambda}$
for the associated expectation). A more precise and complete description of construction of an RCM can be found in [Reference Heydenreich, van der Hofstad, Last and Matzke22], where the reader need only replace instances of
 $\mathbb R^d$
with the space
$\mathbb R^d$
with the space
 ${\mathbb{H}^d}\times \mathcal E$
we use here.
${\mathbb{H}^d}\times \mathcal E$
we use here.
Most of the results contained in this paper hold in a perturbative regime, where we make longer edges more likely. This is achieved by modifying the adjacency function with a scaling function. For all
 $L>0$
, let
$L>0$
, let
 $\sigma_L\colon\mathbb R_+\to \mathbb R_+$
be an increasing bijection such that
$\sigma_L\colon\mathbb R_+\to \mathbb R_+$
be an increasing bijection such that
-
•
 $\sigma_1(r)=r$
,
$\sigma_1(r)=r$
, -
• for all
$r>0$
,
$L\mapsto \sigma_L(r)$
is increasing and
$\lim_{L\to\infty}\sigma_L(r)=\infty$
,




and define
 $\varphi_L\colon\mathbb R_+\times\mathcal E^2\to[0,1]$
by
$\varphi_L\colon\mathbb R_+\times\mathcal E^2\to[0,1]$
by
 \begin{equation} \varphi_L(r;\,a,b) \,:\!=\, \varphi\big(\sigma_L^{-1}(r);\,a,b\big). \end{equation}
\begin{equation} \varphi_L(r;\,a,b) \,:\!=\, \varphi\big(\sigma_L^{-1}(r);\,a,b\big). \end{equation}
We call
 $\sigma_L$
the scaling function and
$\sigma_L$
the scaling function and
 $\varphi_L$
the scaled adjacency function. More generally, the presence of a subscript L in our notation then indicates that the scaled adjacency function
$\varphi_L$
the scaled adjacency function. More generally, the presence of a subscript L in our notation then indicates that the scaled adjacency function
 $\varphi_L$
is being used in the place of the reference adjacency function
$\varphi_L$
is being used in the place of the reference adjacency function
 $\varphi$
.
$\varphi$
.
Remark 2.1. Note that this is different to the concept of spread-out models that appear in lace expansion arguments in, for example, [Reference Heydenreich, van der Hofstad, Last and Matzke22] and [Reference Hara and Slade25], because we do not multiply the adjacency function by a small factor in addition to changing the length scales. In these lace expansion arguments this small factor is required to ensure the lace expansion converges, but this is not required in the arguments here. If one included such a small factor (uniformly in the marks), then objects such as the operator norm
 $\lVert {\varPhi}\rVert_{2\to 2}$
change in an exactly predictable way, and the monotonicity makes objects such as the triangle diagram
$\lVert {\varPhi}\rVert_{2\to 2}$
change in an exactly predictable way, and the monotonicity makes objects such as the triangle diagram
 $\triangle_\lambda$
easy to control. This means that our argument can work with this small factor, but it is not at all necessary.
$\triangle_\lambda$
easy to control. This means that our argument can work with this small factor, but it is not at all necessary.
We shall be particularly interested in a scaling function that linearly scales the volume of balls. For all dimensions
 $d\geq 1$
and radii
$d\geq 1$
and radii
 $r\geq0$
, define
$r\geq0$
, define
 \begin{equation*} \mathbf{V}_d(r)\,:\!=\, \int^r_0\left({\sinh}\, t\right)^{d-1}\mathrm{d} t. \end{equation*}
\begin{equation*} \mathbf{V}_d(r)\,:\!=\, \int^r_0\left({\sinh}\, t\right)^{d-1}\mathrm{d} t. \end{equation*}
Note that the function
 $\mathbf{V}_d\colon \mathbb R_+\to \mathbb R_+$
is a bijection. We can then define the volume-linear scaling function to be
$\mathbf{V}_d\colon \mathbb R_+\to \mathbb R_+$
is a bijection. We can then define the volume-linear scaling function to be
 \begin{equation*} s_L(r) \,:\!=\, \mathbf{V}_d^{-1}\left(L \mathbf{V}_d(r)\right) \end{equation*}
\begin{equation*} s_L(r) \,:\!=\, \mathbf{V}_d^{-1}\left(L \mathbf{V}_d(r)\right) \end{equation*}
for all
 $d\geq 1$
and
$d\geq 1$
and
 $r\geq 0$
. The name arises because this scaling linearly transforms the volume of hyperbolic balls of any radius. Scaling functions are discussed further in Appendix A. For example, the advantages of the volume-linear scaling function over the simpler length-linear
$r\geq 0$
. The name arises because this scaling linearly transforms the volume of hyperbolic balls of any radius. Scaling functions are discussed further in Appendix A. For example, the advantages of the volume-linear scaling function over the simpler length-linear
 $\sigma_L(r)=Lr$
scaling function are identified, and some non-intuitive properties of scaling functions are described that arise from the space
$\sigma_L(r)=Lr$
scaling function are identified, and some non-intuitive properties of scaling functions are described that arise from the space
 ${\mathbb{H}^d}$
.
${\mathbb{H}^d}$
.
2.1.3. Critical behaviour.
Let o designate the (arbitrary) origin of
 ${\mathbb{H}^d}$
—it will sometimes also be convenient to use the notation
${\mathbb{H}^d}$
—it will sometimes also be convenient to use the notation
 ${o_{a}}=(o,a)\in{\mathbb{H}^d}\times \mathcal E$
. For
${o_{a}}=(o,a)\in{\mathbb{H}^d}\times \mathcal E$
. For
 $\mathbf{x}\in\eta$
, let
$\mathbf{x}\in\eta$
, let
 $\mathscr {C}\left(\mathbf{x},\xi\right)$
denote the set of vertices in
$\mathscr {C}\left(\mathbf{x},\xi\right)$
denote the set of vertices in
 $\eta$
that are connected to
$\eta$
that are connected to
 $\mathbf{x}$
in
$\mathbf{x}$
in
 $\xi$
, and naturally
$\xi$
, and naturally
 $\#\mathscr {C}\left(\mathbf{x},\xi\right)$
then denotes the size of this set under the counting measure. The notation
$\#\mathscr {C}\left(\mathbf{x},\xi\right)$
then denotes the size of this set under the counting measure. The notation
 $\xi^{\mathbf{x}}$
indicates that
$\xi^{\mathbf{x}}$
indicates that
 $\xi$
has been augmented by a vertex at
$\xi$
has been augmented by a vertex at
 $\mathbf{x}$
, and since
$\mathbf{x}$
, and since
 $\eta$
is distributed as a Poisson point process this is equivalent to conditioning on
$\eta$
is distributed as a Poisson point process this is equivalent to conditioning on
 $\mathbf{x}\in\eta$
. More details of this procedure can be found in Section 3.
$\mathbf{x}\in\eta$
. More details of this procedure can be found in Section 3.
For all
 $\lambda>0$
and
$\lambda>0$
and
 $L>0$
, we define the susceptibility function
$L>0$
, we define the susceptibility function
 $\chi_{\lambda,L}\colon \mathcal E \to [0,\infty]$
and percolation probability function
$\chi_{\lambda,L}\colon \mathcal E \to [0,\infty]$
and percolation probability function
 $\theta_{\lambda,L}\colon \mathcal E\to [0,1]$
by
$\theta_{\lambda,L}\colon \mathcal E\to [0,1]$
by
 \begin{align*} \chi_{\lambda,L}(a)&\,:\!=\, \mathbb E_{\lambda,L}\left[\#\mathscr {C}\left({o_{a}},\xi^{{o_{a}}}\right)\right],\\ \theta_{\lambda,L}(a) &\,:\!=\, \mathbb{P}_{\lambda,L}\left(\#\mathscr {C}\left({o_{a}},\xi^{{o_{a}}}\right) = \infty\right),\end{align*}
\begin{align*} \chi_{\lambda,L}(a)&\,:\!=\, \mathbb E_{\lambda,L}\left[\#\mathscr {C}\left({o_{a}},\xi^{{o_{a}}}\right)\right],\\ \theta_{\lambda,L}(a) &\,:\!=\, \mathbb{P}_{\lambda,L}\left(\#\mathscr {C}\left({o_{a}},\xi^{{o_{a}}}\right) = \infty\right),\end{align*}
respectively. We then define the susceptibility critical intensity and percolation critical intensity using the susceptibility and percolation probability respectively:
 \begin{align} \lambda_T(L) \,:\!=\,& \inf\left\{\lambda>0\colon \textrm{ess sup}_{a\in\mathcal E}\chi_{\lambda,L}(a)=\infty\right\},\\[-10pt]\nonumber \end{align}
\begin{align} \lambda_T(L) \,:\!=\,& \inf\left\{\lambda>0\colon \textrm{ess sup}_{a\in\mathcal E}\chi_{\lambda,L}(a)=\infty\right\},\\[-10pt]\nonumber \end{align}
 \begin{align} \lambda_{\mathrm{c}}(L) \,:\!=\,& \inf\left\{\lambda>0\colon \textrm{ess sup}_{a\in\mathcal E}\theta_{\lambda,L}(a)>0\right\}. \end{align}
\begin{align} \lambda_{\mathrm{c}}(L) \,:\!=\,& \inf\left\{\lambda>0\colon \textrm{ess sup}_{a\in\mathcal E}\theta_{\lambda,L}(a)>0\right\}. \end{align}
If we fix
 $L>0$
then we say that the critical exponents
$L>0$
then we say that the critical exponents
 $\gamma=\gamma(L)$
and
$\gamma=\gamma(L)$
and
 $\beta=\beta(L)$
exist in the bounded ratio sense if there exist
$\beta=\beta(L)$
exist in the bounded ratio sense if there exist
 $\lambda$
-independent constants
$\lambda$
-independent constants
 $C_1,C_2\in(0,\infty)$
and
$C_1,C_2\in(0,\infty)$
and
 $\varepsilon>0$
such that
$\varepsilon>0$
such that
 \begin{equation*} C_1\left(\lambda_{T}(L)-\lambda\right)^{-\gamma} \leq \lVert {\chi_{\lambda,L}}\rVert_p \leq C_2\left(\lambda_{T}(L)-\lambda\right)^{-\gamma} \end{equation*}
\begin{equation*} C_1\left(\lambda_{T}(L)-\lambda\right)^{-\gamma} \leq \lVert {\chi_{\lambda,L}}\rVert_p \leq C_2\left(\lambda_{T}(L)-\lambda\right)^{-\gamma} \end{equation*}
for all
 $\lambda\in\left(\lambda_{T}(L)-\varepsilon,\lambda_{T}(L)\right)$
and
$\lambda\in\left(\lambda_{T}(L)-\varepsilon,\lambda_{T}(L)\right)$
and
 $p\in[1,\infty]$
, and
$p\in[1,\infty]$
, and
 \begin{equation*} C_1\left(\lambda-\lambda_{\mathrm{c}}(L)\right)^\beta \leq \lVert {\theta_{\lambda,L}}\rVert_p\leq C_2\left(\lambda - \lambda_{\mathrm{c}}(L)\right)^\beta \end{equation*}
\begin{equation*} C_1\left(\lambda-\lambda_{\mathrm{c}}(L)\right)^\beta \leq \lVert {\theta_{\lambda,L}}\rVert_p\leq C_2\left(\lambda - \lambda_{\mathrm{c}}(L)\right)^\beta \end{equation*}
for all
 $\lambda\in\left(\lambda_{\mathrm{c}}(L),\lambda_{\mathrm{c}}(L)+\varepsilon\right)$
and
$\lambda\in\left(\lambda_{\mathrm{c}}(L),\lambda_{\mathrm{c}}(L)+\varepsilon\right)$
and
 $p\in[1,\infty]$
. In these,
$p\in[1,\infty]$
. In these,
 $\lVert {\cdot}\rVert_p$
denotes the
$\lVert {\cdot}\rVert_p$
denotes the
 $L^p$
norm with respect to the measure
$L^p$
norm with respect to the measure
 $\mathcal P$
on
$\mathcal P$
on
 $\mathcal E$
. We also say that the cluster tail critical exponent
$\mathcal E$
. We also say that the cluster tail critical exponent
 $\delta=\delta(L)$
exists in the bounded ratio sense if there exist constants
$\delta=\delta(L)$
exists in the bounded ratio sense if there exist constants
 $C_1,C_2\in(0,\infty)$
such that
$C_1,C_2\in(0,\infty)$
such that
 \begin{equation*} C_1 n^{-{1}/{\delta}} \leq \mathbb{P}_{\lambda_{\mathrm{c}}(L),L}\left(\#\mathscr {C}\left({o_{a}},\xi^{{o_{a}}}\right) \geq n\right) \leq C_2 n^{-{1}/{\delta}} \end{equation*}
\begin{equation*} C_1 n^{-{1}/{\delta}} \leq \mathbb{P}_{\lambda_{\mathrm{c}}(L),L}\left(\#\mathscr {C}\left({o_{a}},\xi^{{o_{a}}}\right) \geq n\right) \leq C_2 n^{-{1}/{\delta}} \end{equation*}
for all
 $n\in\mathbb N$
and
$n\in\mathbb N$
and
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a\in\mathcal E$
.
$a\in\mathcal E$
.
In addition to the percolation critical intensity, we discuss the uniqueness critical intensity defined by
 \begin{equation*} \lambda_{\mathrm{u}}(L) \,:\!=\, \inf\left\{\lambda>0\colon \mathbb{P}_{\lambda,L}\left(\exists! \text{ infinite cluster}\right)>0\right\}.\end{equation*}
\begin{equation*} \lambda_{\mathrm{u}}(L) \,:\!=\, \inf\left\{\lambda>0\colon \mathbb{P}_{\lambda,L}\left(\exists! \text{ infinite cluster}\right)>0\right\}.\end{equation*}
If
 $\lambda<\lambda_{\mathrm{c}}(L)$
then there are almost surely no infinite clusters, and therefore,
$\lambda<\lambda_{\mathrm{c}}(L)$
then there are almost surely no infinite clusters, and therefore,
 $\lambda_{\mathrm{u}}(L)\geq \lambda_{\mathrm{c}}(L)$
. We will be interested in finding whether this inequality is strict. Note that the invariance of both the vertex process and adjacency function under the isometries means that all the distributions
$\lambda_{\mathrm{u}}(L)\geq \lambda_{\mathrm{c}}(L)$
. We will be interested in finding whether this inequality is strict. Note that the invariance of both the vertex process and adjacency function under the isometries means that all the distributions
 $\mathbb{P}_{\lambda,L}$
are invariant under the isometries. Therefore, by standard ergodicity arguments
$\mathbb{P}_{\lambda,L}$
are invariant under the isometries. Therefore, by standard ergodicity arguments
 $\mathbb{P}_{\lambda,L}\left(\exists! \text{ infinite cluster}\right)\in\left\{0,1\right\}$
, and so
$\mathbb{P}_{\lambda,L}\left(\exists! \text{ infinite cluster}\right)\in\left\{0,1\right\}$
, and so
 $\lambda_{\mathrm{u}}(L)= \inf\{\lambda>0\colon \exists! \text{ infinite cluster } \mathbb{P}_{\lambda,L}\text{-almost}$
$\lambda_{\mathrm{u}}(L)= \inf\{\lambda>0\colon \exists! \text{ infinite cluster } \mathbb{P}_{\lambda,L}\text{-almost}$
 $\text{ surely}\}$
.
$\text{ surely}\}$
.
2.2. General results
We first state the two main general theorems before applying them to notable specific cases in Section 2.3. One of these general theorems proves that a non-uniqueness phase exists, and the other proves that critical exponents take their mean-field values. These will be proven in two types of regime. In one regime we require that there are only finitely many marks, which allows us more freedom in the scaling function chosen. In the other regime we allow for infinitely many marks, but to avoid excessive complications we require that the scaling function takes the nice volume-scaling form.
Assumption 1. (Finitely many marks.) There are only finitely many marks, and there exists
 $L_0>0$
such that
$L_0>0$
such that
 $L\geq L_0$
implies that
$L\geq L_0$
implies that
 \begin{equation} \max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b)r\exp\bigg(\frac{1}{2}(d-1) r\bigg)\mathrm{d} r<\infty. \end{equation}
\begin{equation} \max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b)r\exp\bigg(\frac{1}{2}(d-1) r\bigg)\mathrm{d} r<\infty. \end{equation}
Also assume that
 \begin{equation} \lim_{L\to\infty}\frac{\max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r} = 0 \end{equation}
\begin{equation} \lim_{L\to\infty}\frac{\max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r} = 0 \end{equation}
for all
 $R<\infty$
.
$R<\infty$
.
Note that under Assumption 1, without loss of generality we assume that
 $\mathcal P(a)>0$
for all
$\mathcal P(a)>0$
for all
 $a\in\mathcal E$
. In Appendix A, it is shown that (2.7) holds for all adjacency functions if the scaling function is volume-linear or length-linear, and that it holds for all scaling functions for some classes of adjacency function. However, Lemma A.7 demonstrates that (2.7) does not hold for a specific choice of scaling and adjacency function. Therefore, (2.7) is indeed necessary in Assumption 1 for the arguments in this paper to work.
$a\in\mathcal E$
. In Appendix A, it is shown that (2.7) holds for all adjacency functions if the scaling function is volume-linear or length-linear, and that it holds for all scaling functions for some classes of adjacency function. However, Lemma A.7 demonstrates that (2.7) does not hold for a specific choice of scaling and adjacency function. Therefore, (2.7) is indeed necessary in Assumption 1 for the arguments in this paper to work.
Assumption 2. (Volume-linear scaling.) The scaling function is volume-linear,
 \begin{equation} \int^\infty_0\varphi(r;\,a,b)r\exp\left(\frac{1}{2}(d-1) r\right)\mathrm{d} r< \infty \end{equation}
\begin{equation} \int^\infty_0\varphi(r;\,a,b)r\exp\left(\frac{1}{2}(d-1) r\right)\mathrm{d} r< \infty \end{equation}
for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
, and
$a,b\in\mathcal E$
, and
 \begin{equation} \sup\nolimits_{f\in L^2(\mathcal E), f\ne 0}\frac{\int_\mathcal E\lvert {\int_\mathcal E\big(\!\int^\infty_0\varphi(r;\,a,b)r\exp\big(\tfrac{1}{2}(d-1) r\big)\mathrm{d} r\big) f(b)\mathcal P(\mathrm{d} b)}\rvert^2\mathcal P(\mathrm{d} a)}{\int_{\mathcal E}\lvert{f(a)}\rvert^2\mathcal P(\mathrm{d} a)}<\infty. \end{equation}
\begin{equation} \sup\nolimits_{f\in L^2(\mathcal E), f\ne 0}\frac{\int_\mathcal E\lvert {\int_\mathcal E\big(\!\int^\infty_0\varphi(r;\,a,b)r\exp\big(\tfrac{1}{2}(d-1) r\big)\mathrm{d} r\big) f(b)\mathcal P(\mathrm{d} b)}\rvert^2\mathcal P(\mathrm{d} a)}{\int_{\mathcal E}\lvert{f(a)}\rvert^2\mathcal P(\mathrm{d} a)}<\infty. \end{equation}
The condition (2.8) corresponds to (2.6), taking into account the fact that the volume-linear scaling ensures that if (2.8) is finite for one scaling L then it is finite for any
 $L>0$
. In the operator notation we introduce in Section 4, the conditions (2.6) and (2.9) ensure that the operator norms
$L>0$
. In the operator notation we introduce in Section 4, the conditions (2.6) and (2.9) ensure that the operator norms
 $\lVert {\varPhi_L}\rVert_{2\to 2}<\infty$
for sufficiently large L. The choice of the volume-linear scaling also means that no condition corresponding to (2.7) is required (see Lemma A.2).
$\lVert {\varPhi_L}\rVert_{2\to 2}<\infty$
for sufficiently large L. The choice of the volume-linear scaling also means that no condition corresponding to (2.7) is required (see Lemma A.2).
Theorem 2.1. If Assumption 1 or Assumption 2 holds then, for the sufficiently large parameter L, we have
 $\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
.
$\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
.
The restriction of Assumptions 1 and 2 to 3 and 4, respectively, in Theorem 2.2 results from inheriting conditions from [Reference Caicedo and Dickson9] (recalled exactly in Section 6.2). For succinctness, we introduce some notation. Given
 $a,b\in\mathcal E$
,
$a,b\in\mathcal E$
,
 $k\geq 1$
, and
$k\geq 1$
, and
 $L>0$
, let us define
$L>0$
, let us define
 \begin{align} D_L(a,b) &\,:\!=\, \int_{{\mathbb{H}^d}}\varphi_L\left(x;\,a,b\right)\mu(\mathrm{d} x), \\[-10pt]\nonumber \end{align}
\begin{align} D_L(a,b) &\,:\!=\, \int_{{\mathbb{H}^d}}\varphi_L\left(x;\,a,b\right)\mu(\mathrm{d} x), \\[-10pt]\nonumber \end{align}
 \begin{align} D_L^{(k)}(a,b) &\,:\!=\, \int_{\mathcal E^{k-1}}\left(\prod^k_{j=1} D_L(c_{j-1},c_j)\right)\prod^{k-1}_{i=1}\mathcal P\left(\mathrm{d} c_i\right),\end{align}
\begin{align} D_L^{(k)}(a,b) &\,:\!=\, \int_{\mathcal E^{k-1}}\left(\prod^k_{j=1} D_L(c_{j-1},c_j)\right)\prod^{k-1}_{i=1}\mathcal P\left(\mathrm{d} c_i\right),\end{align}
where
 $c_0=a$
and
$c_0=a$
and
 $c_k=b$
. The functions D(a,b) and
$c_k=b$
. The functions D(a,b) and
 $D^{(k)}(a,b)$
(with no subscript L) are constructed in exactly the same way with the reference function
$D^{(k)}(a,b)$
(with no subscript L) are constructed in exactly the same way with the reference function
 $\varphi$
in the place of
$\varphi$
in the place of
 $\varphi_L$
.
$\varphi_L$
.
Assumption 3. In addition to Assumption 1, the following inequalities hold:
 \begin{align} \limsup_{L\to\infty}\frac{\max_{a,b\in\mathcal E} D_L(a,b)}{\min_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b)}&<\infty, \\[-8pt]\nonumber \end{align}
\begin{align} \limsup_{L\to\infty}\frac{\max_{a,b\in\mathcal E} D_L(a,b)}{\min_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b)}&<\infty, \\[-8pt]\nonumber \end{align}
 \begin{align} \liminf_{L\to\infty}\sup_{k\geq 1}\frac{\min_{a,b\in\mathcal E} D^{(k)}_L(a,b)}{(\max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b))^k} &>0. \end{align}
\begin{align} \liminf_{L\to\infty}\sup_{k\geq 1}\frac{\min_{a,b\in\mathcal E} D^{(k)}_L(a,b)}{(\max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b))^k} &>0. \end{align}
Assumption 4. In addition to Assumption 2, the following inequalities hold for the reference adjacency function:
 \begin{align} \textrm{ess sup}_{a,b\in\mathcal E} D(a,b)<\infty, \end{align}
\begin{align} \textrm{ess sup}_{a,b\in\mathcal E} D(a,b)<\infty, \end{align}
 \begin{align} \textrm{ess inf}_{a\in\mathcal E}\int_\mathcal E D(a,b)\mathcal P(\mathrm{d} b)>0, \end{align}
\begin{align} \textrm{ess inf}_{a\in\mathcal E}\int_\mathcal E D(a,b)\mathcal P(\mathrm{d} b)>0, \end{align}
 \begin{align} \textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b)>0. \end{align}
\begin{align} \textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b)>0. \end{align}
Theorem 2.2. If Assumption 3 or Assumption 4 holds then, for all sufficiently large L, the critical exponents exist and
 $\gamma(L)=1$
,
$\gamma(L)=1$
,
 $\beta(L)=1$
, and
$\beta(L)=1$
, and
 $\delta(L)=2$
. Furthermore,
$\delta(L)=2$
. Furthermore,
 $\lambda_T(L)=\lambda_{\mathrm{c}}(L)$
.
$\lambda_T(L)=\lambda_{\mathrm{c}}(L)$
.
The additions of Assumption 3 and Assumption 4 serve the same role, in that they allow us to use results from [Reference Caicedo and Dickson9] (summarized as Proposition 6.1 in this paper).
Remark 2.2. The requirement that L be sufficiently large is very important for the proofs of both Theorems 2.1 and 2.2. While the analogy with BBP on locally finite quasi-transitive non-amenable (and, say, Gromov hyperbolic) graphs suggests that the non-uniqueness phase should be non-empty for at least a large class of RCMs on
 ${\mathbb{H}^d}\times\mathcal E$
, the general argument presented here relies heavily on the perturbative parameter L. That said, Proposition 2.1 in Section 2.3 does show non-uniqueness for some models if one is willing to drop the requirement that the resulting graph is locally finite.
${\mathbb{H}^d}\times\mathcal E$
, the general argument presented here relies heavily on the perturbative parameter L. That said, Proposition 2.1 in Section 2.3 does show non-uniqueness for some models if one is willing to drop the requirement that the resulting graph is locally finite.
2.3. Applications to specific models
We now see how Theorems 2.1 and 2.2 can apply to various notable examples of RCMs. We also see in Proposition 2.1 a result that is not strictly a corollary of these theorems, but can be derived by applying similar techniques. In particular, it is non-perturbative unlike the general theorems.
2.3.1. Scaled Boolean disc model on
${\mathbb{H}^d}$
.

Let
 $\mathcal E\subset(0,\infty)$
and
$\mathcal E\subset(0,\infty)$
and
 $\mathcal P$
be a probability measure on
$\mathcal P$
be a probability measure on
 $\mathcal E$
, and for all
$\mathcal E$
, and for all
 $r\geq 0$
and
$r\geq 0$
and
 $a,b\in\mathcal E$
, let
$a,b\in\mathcal E$
, let
 \begin{equation*} \varphi(r;\,a,b)=\unicode{x1D7D9}_{\left\{r \lt a+b\right\}}. \end{equation*}
\begin{equation*} \varphi(r;\,a,b)=\unicode{x1D7D9}_{\left\{r \lt a+b\right\}}. \end{equation*}
The RCM with this reference adjacency function is a Boolean disc model in that it can be interpreted by placing balls with random radii with distribution
 $\mathcal P$
centred on the points of a Poisson point process (intensity
$\mathcal P$
centred on the points of a Poisson point process (intensity
 $\lambda$
) on
$\lambda$
) on
 ${\mathbb{H}^d}$
. Vertices in the RCM are then adjacent if the associated two balls overlap.
${\mathbb{H}^d}$
. Vertices in the RCM are then adjacent if the associated two balls overlap.
We refer to the model with the scaled adjacency function
 $\varphi_L$
as the scaled Boolean disc model. The distinction is emphasised because in general the scaled Boolean disc model does not have the ‘placing balls’ interpretation. If the scaling function is length-linear (i.e.
$\varphi_L$
as the scaled Boolean disc model. The distinction is emphasised because in general the scaled Boolean disc model does not have the ‘placing balls’ interpretation. If the scaling function is length-linear (i.e.
 $\sigma_L(r)=Lr$
) then the interpretation survives: if the original ball had radius R then the scaled ball has radius LR and vertices share an edge if and only if their balls intersect. If
$\sigma_L(r)=Lr$
) then the interpretation survives: if the original ball had radius R then the scaled ball has radius LR and vertices share an edge if and only if their balls intersect. If
 $\mathcal E$
is a singleton (without loss of generality
$\mathcal E$
is a singleton (without loss of generality
 $\mathcal E=\{1\}$
) then the interpretation survives again and the balls all have radius
$\mathcal E=\{1\}$
) then the interpretation survives again and the balls all have radius
 $\frac{1}{2}\sigma_L(2)$
. However, if the support of
$\frac{1}{2}\sigma_L(2)$
. However, if the support of
 $\mathcal P$
is at least two elements of
$\mathcal P$
is at least two elements of
 $(0,\infty)$
, and the scaling function is not linear in r, then radii cannot be assigned to each mark so that vertices are adjacent in the RCM if and only if the balls intersect.
$(0,\infty)$
, and the scaling function is not linear in r, then radii cannot be assigned to each mark so that vertices are adjacent in the RCM if and only if the balls intersect.
If one insisted on retaining the interpretation of ‘placing balls’ on the vertices, one could consider a model where
 $\varphi_L(r;\,a,b) \,:\!=\, \unicode{x1D7D9}_{\left\{r<\sigma_L(a)+\sigma_L(b)\right\}}$
for some scaling function
$\varphi_L(r;\,a,b) \,:\!=\, \unicode{x1D7D9}_{\left\{r<\sigma_L(a)+\sigma_L(b)\right\}}$
for some scaling function
 $\sigma_L$
. However, if
$\sigma_L$
. However, if
 $\sigma_L(a)+\sigma_L(b)\ne \sigma_L(a+b)$
for some
$\sigma_L(a)+\sigma_L(b)\ne \sigma_L(a+b)$
for some
 $a,b\in\mathcal E$
for sufficiently large L, then this is not in our framework.
$a,b\in\mathcal E$
for sufficiently large L, then this is not in our framework.
Corollary 2.1. Consider the scaled Boolean disc model on
 ${\mathbb{H}^d}$
. Then the following implications hold.
${\mathbb{H}^d}$
. Then the following implications hold.
-
(a) If
$R^*\,:\!=\,\sup\mathcal E<\infty$
and
$\mathcal P\left(\left\{R^*\right\}\right)>0$
then, for sufficiently large L, we have
$\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
. -
(b) If
$\sigma_L$
is volume linear and (2.17)then for sufficiently large L, we have
\begin{equation}\int^\infty_0r^2\exp((d-1)r)\mathcal P(\mathrm{d} r)<\infty,\end{equation}
$\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
.
-
(c) If
(2.18)then, for all
\begin{equation}\int^\infty_0\exp((d-1)r) \mathcal P(\mathrm{d} r)=\infty\end{equation}
$L\geq 1$
, almost every vertex is in the same infinite cluster, and
$\lambda_{\mathrm{u}}(L)=\lambda_{\mathrm{c}}(L)=0$
.
-
(d) If
$\sigma_L$
is volume linear and
$R^*<\infty$
then, for sufficiently large L, we also have
$\gamma(L)=1$
,
$\beta(L)=1$
,
$\delta(L)=2$
, and
$\lambda_T(L)=\lambda_{\mathrm{c}}(L)$
.















Observe that parts (a) and (c) do not require a specific scaling function. Therefore, these parts apply to models with the length-linear scaling function, on which the ‘placing balls’ interpretation survives.
Also note that apart from the extra factor of
 $r^2$
in (2.17), the volume-linear scaling choice, and the requirement that L be sufficiently large, the condition (2.17) is the complement of (2.18). This leaves only a small space between the two regimes uncovered.
$r^2$
in (2.17), the volume-linear scaling choice, and the requirement that L be sufficiently large, the condition (2.17) is the complement of (2.18). This leaves only a small space between the two regimes uncovered.
Corollary 2.1 parts (a) and (b) are both generalisations of the non-uniqueness result of [Reference Tykesson39] in dimensions
 $d\geq 3$
—their result in these dimensions is recovered by taking
$d\geq 3$
—their result in these dimensions is recovered by taking
 $\mathcal E=\{1\}$
for example. It does not recover their result on
$\mathcal E=\{1\}$
for example. It does not recover their result on
 ${\mathbb{H}^2}$
because the corollary here still requires the perturbative ‘sufficiently large L’ condition for that part.
${\mathbb{H}^2}$
because the corollary here still requires the perturbative ‘sufficiently large L’ condition for that part.
For Boolean disc models on
 $\mathbb R^d$
, the result of [Reference Chebunin and Last10] proves that there is at most one infinite cluster, and Hall [Reference Hall19] proved that almost every point in
$\mathbb R^d$
, the result of [Reference Chebunin and Last10] proves that there is at most one infinite cluster, and Hall [Reference Hall19] proved that almost every point in
 $\mathbb R^d$
is covered by one of the balls if the radius distribution has an infinite d moment. The values of the critical exponents are less well understood. If the radius distribution has a finite
$\mathbb R^d$
is covered by one of the balls if the radius distribution has an infinite d moment. The values of the critical exponents are less well understood. If the radius distribution has a finite
 $5d-3$
moment, then Duminil-Copin et al. [Reference Duminil-Copin, Raoufi and Tassion14] proved a lower bound for the percolation function that corresponds to the exponent
$5d-3$
moment, then Duminil-Copin et al. [Reference Duminil-Copin, Raoufi and Tassion14] proved a lower bound for the percolation function that corresponds to the exponent
 $\gamma=1$
, and Dewan and Muirhead [Reference Dewan and Muirhead13] extended this to lower bounds on the susceptibility function and critical cluster tail probabilities that correspond to the mean-field exponents
$\gamma=1$
, and Dewan and Muirhead [Reference Dewan and Muirhead13] extended this to lower bounds on the susceptibility function and critical cluster tail probabilities that correspond to the mean-field exponents
 $\beta=1$
and
$\beta=1$
and
 $\delta=2$
. The
$\delta=2$
. The
 $5d-3$
moment is not expected to be ‘true’ and is instead a consequence of the technique used. If we further restrict to radii distributions with bounded support, Dickson and Heydenreich [Reference Dickson and Heydenreich11] showed that the triangle diagram is finite for sufficiently large d (a similar approach should work for
$5d-3$
moment is not expected to be ‘true’ and is instead a consequence of the technique used. If we further restrict to radii distributions with bounded support, Dickson and Heydenreich [Reference Dickson and Heydenreich11] showed that the triangle diagram is finite for sufficiently large d (a similar approach should work for
 $d>6$
and a sufficiently ‘spread-out’ radius distribution), and then [Reference Caicedo and Dickson9] can be used to derive matching upper bounds (up to a factor of a constant) for the percolation and susceptibility functions and the critical cluster tail probabilities.
$d>6$
and a sufficiently ‘spread-out’ radius distribution), and then [Reference Caicedo and Dickson9] can be used to derive matching upper bounds (up to a factor of a constant) for the percolation and susceptibility functions and the critical cluster tail probabilities.
2.3.2. Weight-dependent hyperbolic RCMs.
Let
 $\mathcal E=(0,1)$
with Lebesgue measure:
$\mathcal E=(0,1)$
with Lebesgue measure:
 $\mathcal P=\textrm{Leb}(0,1)$
. Let the profile function
$\mathcal P=\textrm{Leb}(0,1)$
. Let the profile function
 $\rho\colon \mathbb R_+\to [0,1]$
be non-increasing and the kernel function
$\rho\colon \mathbb R_+\to [0,1]$
be non-increasing and the kernel function
 $\kappa\colon (0,1)^2\to (0,\infty)$
be measurable and non-increasing in both arguments. We define a weight-dependent RCM on
$\kappa\colon (0,1)^2\to (0,\infty)$
be measurable and non-increasing in both arguments. We define a weight-dependent RCM on
 ${\mathbb{H}^d}$
by it having the adjacency function
${\mathbb{H}^d}$
by it having the adjacency function
 \begin{equation} \varphi(r;\,a,b) = \rho\big(s^{-1}_{\kappa(a,b)}(r)\big) \end{equation}
\begin{equation} \varphi(r;\,a,b) = \rho\big(s^{-1}_{\kappa(a,b)}(r)\big) \end{equation}
for all
 $r\geq 0$
and
$r\geq 0$
and
 $a,b\in(0,1)$
. This model has not been studied in this generality before, but is a natural analogy of the weight-dependent Euclidean RCMs discussed in literature such as [Reference Gracar, Heydenreich, Mönch and Mörters16], [Reference Gracar, Lüchtrath and Mörters17], [Reference van der Hofstad, van der Hoorn and Maitra23], [Reference Jorritsma, Komjáthy and Mitsche27], [Reference Komjáthy and Lodewijks28] (variously also called: general geometric inhomogeneous, spatial inhomogeneous, and kernel-based spatial random graphs). In both the hyperbolic and Euclidean cases the form of the input to the profile function ensures that the density of edges between marks is just given by the product of the mass of the profile function and a function of the kernel function evaluated on those marks. In our case, the use of the volume-linear scaling function means that the density of a-b edges is given by
$a,b\in(0,1)$
. This model has not been studied in this generality before, but is a natural analogy of the weight-dependent Euclidean RCMs discussed in literature such as [Reference Gracar, Heydenreich, Mönch and Mörters16], [Reference Gracar, Lüchtrath and Mörters17], [Reference van der Hofstad, van der Hoorn and Maitra23], [Reference Jorritsma, Komjáthy and Mitsche27], [Reference Komjáthy and Lodewijks28] (variously also called: general geometric inhomogeneous, spatial inhomogeneous, and kernel-based spatial random graphs). In both the hyperbolic and Euclidean cases the form of the input to the profile function ensures that the density of edges between marks is just given by the product of the mass of the profile function and a function of the kernel function evaluated on those marks. In our case, the use of the volume-linear scaling function means that the density of a-b edges is given by
 \begin{equation*} \int_{{\mathbb{H}^d}}\varphi_L\big(\mathrm{dist}_{{\mathbb{H}^d}} (x,o);\,a,b\big)\mu(\mathrm{d} x) = L\kappa(a,b)\int_{{\mathbb{H}^d}} \rho(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))\mu(\mathrm{d} x).\end{equation*}
\begin{equation*} \int_{{\mathbb{H}^d}}\varphi_L\big(\mathrm{dist}_{{\mathbb{H}^d}} (x,o);\,a,b\big)\mu(\mathrm{d} x) = L\kappa(a,b)\int_{{\mathbb{H}^d}} \rho(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))\mu(\mathrm{d} x).\end{equation*}
In particular this allows for the possibility that under appropriate kernel functions, the degree of a vertex with a uniformly chosen mark asymptotically follows a Pareto distribution rather than a Poisson distribution as it would in the unmarked case. The homomorphism structure of
 $s_L$
(see (A.2)) means that the volume-linear scaling parameter L is equivalent to a parameter multiplying the kernel by L. In the Euclidean literature this is often called the edge density parameter, and is denoted by the character
$s_L$
(see (A.2)) means that the volume-linear scaling parameter L is equivalent to a parameter multiplying the kernel by L. In the Euclidean literature this is often called the edge density parameter, and is denoted by the character
 $\beta$
. In this paper
$\beta$
. In this paper
 $\beta$
is reserved for the percolation critical exponent.
$\beta$
is reserved for the percolation critical exponent.
We now highlight five specific weight-dependent RCMs by specifying their respective kernel function. In each case the parameter
 $\zeta>0$
, while
$\zeta>0$
, while
 $a\wedge b\,:\!=\, \min\left\{a,b\right\}$
and
$a\wedge b\,:\!=\, \min\left\{a,b\right\}$
and
 $a\vee b\,:\!=\, \max\left\{a,b\right\}$
.
$a\vee b\,:\!=\, \max\left\{a,b\right\}$
.
-
• The product kernel is defined by
(2.20)
\begin{equation} \kappa^{\textrm{prod}}(a,b) \,:\!=\, \left(ab\right)^{-\zeta}. \end{equation}
-
• The strong kernel is defined by
(2.21)
\begin{equation} \kappa^{\textrm{strong}}(a,b) \,:\!=\, \left(a\wedge b\right)^{-\zeta}. \end{equation}
-
• The sum kernel is a related kernel function defined by
(2.22)The sum and strong kernels are related because
\begin{equation} \kappa^{\textrm{sum}}(a,b) \,:\!=\, a^{-\zeta} + b^{-\zeta}. \end{equation}
$\kappa^{\textrm{strong}}\leq \kappa^{\textrm{sum}} \leq 2 \kappa^{\textrm{strong}}$
, and therefore, show qualitatively the same behaviour. Observe that in this interpretation of the weight-dependent hyperbolic RCM, the sum kernel does not produce a Boolean disc model (specifically the ‘placing balls on each vertex’ interpretation), because
$s_L(r_1)+s_L(r_2)\ne s_L(r_1+r_2)$
in general. It is also a different model to the scaled Boolean disc model described above, because the ‘sum’ appears in the scaling function here, while it appeared in the reference adjacency function for the scaled Boolean disc model.
-
• The weak kernel is defined by
(2.23)
\begin{equation} \kappa^{\textrm{weak}}(a,b) \,:\!=\, \left(a\vee b\right)^{-1-\zeta}. \end{equation}
-
• The preferential attachment kernel is defined by
(2.24)
\begin{equation} \kappa^{\textrm{pa}}(a,b) \,:\!=\, \left(a\vee b\right)^{-1+\zeta}\left(a\wedge b\right)^{-\zeta}. \end{equation}







In [Reference Gracar, Heydenreich, Mönch and Mörters16] and [Reference Gracar, Lüchtrath and Mörters17] the parameter
 $\zeta$
was denoted by
$\zeta$
was denoted by
 $\gamma$
, but this latter character will be reserved for the susceptibility critical exponent in this paper. As the following corollaries will show, we cannot actually say anything about the behaviour of the weak and preferential attachment models, but we include them to show the limitations of the approach (which possibly suggests a different behaviour for these models).
$\gamma$
, but this latter character will be reserved for the susceptibility critical exponent in this paper. As the following corollaries will show, we cannot actually say anything about the behaviour of the weak and preferential attachment models, but we include them to show the limitations of the approach (which possibly suggests a different behaviour for these models).
In the following results, let
 $\mathcal{K}$
denote the linear operator acting on
$\mathcal{K}$
denote the linear operator acting on
 $L^2(\mathcal E)$
by
$L^2(\mathcal E)$
by
 \begin{equation*} \left(\mathcal{K} f\right)(a) = \int_{\mathcal E}\kappa(a,b)f(b)\mathcal P(\mathrm{d} b), \end{equation*}
\begin{equation*} \left(\mathcal{K} f\right)(a) = \int_{\mathcal E}\kappa(a,b)f(b)\mathcal P(\mathrm{d} b), \end{equation*}
and let
 $\lVert {\mathcal{K}}\rVert_{2\to 2}$
denote the operator norm
$\lVert {\mathcal{K}}\rVert_{2\to 2}$
denote the operator norm
 \begin{equation*} \lVert {\mathcal{K}}\rVert_{2\to 2} = \sup\left\{\frac{\lVert \mathcal{K} f \rVert_2}{\lVert f \rVert_2}\colon f\in L^2(\mathcal E),f\ne 0\right\}. \end{equation*}
\begin{equation*} \lVert {\mathcal{K}}\rVert_{2\to 2} = \sup\left\{\frac{\lVert \mathcal{K} f \rVert_2}{\lVert f \rVert_2}\colon f\in L^2(\mathcal E),f\ne 0\right\}. \end{equation*}
Corollary 2.2. Consider a weight-dependent RCM on
 ${\mathbb{H}^d}$
with volume-linear scaling. If
${\mathbb{H}^d}$
with volume-linear scaling. If
 \begin{equation} \int^\infty_0\rho(r) r\exp\left(\frac{1}{2}(d-1)\right)\mathrm{d} r <\infty \end{equation}
\begin{equation} \int^\infty_0\rho(r) r\exp\left(\frac{1}{2}(d-1)\right)\mathrm{d} r <\infty \end{equation}
and
 $\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
then, for sufficiently large L, we have
$\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
then, for sufficiently large L, we have
 $\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
.
$\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
.
Corollary 2.3. For the product, strong, and sum kernels,
 \begin{equation*} \zeta<\frac{1}{2} \iff \lVert {\mathcal{K}}\rVert_{2\to 2}<\infty. \end{equation*}
\begin{equation*} \zeta<\frac{1}{2} \iff \lVert {\mathcal{K}}\rVert_{2\to 2}<\infty. \end{equation*}
For the weak and preferential attachment kernels,
 $\lVert {\mathcal{K}}\rVert_{2\to 2}=\infty$
for all
$\lVert {\mathcal{K}}\rVert_{2\to 2}=\infty$
for all
 $\zeta>0$
.
$\zeta>0$
.
Therefore, for weight-dependent RCMs on
 ${\mathbb{H}^d}$
with product, strong, and sum kernels with parameter
${\mathbb{H}^d}$
with product, strong, and sum kernels with parameter
 $\zeta<\frac{1}{2}$
, if the scaling is volume-linear and the profile function satisfies (2.25), we have
$\zeta<\frac{1}{2}$
, if the scaling is volume-linear and the profile function satisfies (2.25), we have
 $\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
for sufficiently large L.
$\lambda_{\mathrm{u}}(L) > \lambda_{\mathrm{c}}(L)$
for sufficiently large L.
While the following result is not strictly a corollary of the theorems above, by using the bound on the uniqueness threshold developed here we can produce a non-perturbative result for weight-dependent hyperbolic RCMs with moderately heavy-tailed profile functions.
Proposition 2.1. Consider a weight-dependent RCM on
 ${\mathbb{H}^d}$
. If
${\mathbb{H}^d}$
. If
-
(a)
(2.26)
\begin{equation} \int^\infty_0\rho(r)\exp((d-1)r)\mathrm{d} r=\infty, \end{equation}
-
(b)
(2.27)
\begin{equation} \int^\infty_0\rho(r)r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r<\infty, \end{equation}
-
(c)
(2.28)
\begin{equation} \lVert {\mathcal{K}}\rVert_{2\to 2}<\infty, \end{equation}



then
 $\lambda_T=\lambda_{\mathrm{c}}=0$
and
$\lambda_T=\lambda_{\mathrm{c}}=0$
and
 $\lambda_{\mathrm{u}}>0$
. Furthermore,
$\lambda_{\mathrm{u}}>0$
. Furthermore,
 $\theta_\lambda(a)=1$
for all
$\theta_\lambda(a)=1$
for all
 $\lambda>0$
for a
$\lambda>0$
for a
 $\mathcal P$
-positive measure of
$\mathcal P$
-positive measure of
 $a\in\mathcal E$
, and therefore, the critical exponent
$a\in\mathcal E$
, and therefore, the critical exponent
 $\beta=0$
.
$\beta=0$
.
If
 $\lambda_T=0$
then it does not make sense to talk about our definition of the critical exponent
$\lambda_T=0$
then it does not make sense to talk about our definition of the critical exponent
 $\gamma$
.
$\gamma$
.
Remark 2.3. When talking about Bernoulli bond (or site) percolation it is usually assumed that the original graph is locally finite. Similarly, when talking about (marked or unmarked) RCMs there is usually an integral condition on
 $\varphi$
that ensures that the degrees of each vertex are almost surely finite (and so the resulting graph is locally finite). One reason this is done is that without these conditions one immediately gets
$\varphi$
that ensures that the degrees of each vertex are almost surely finite (and so the resulting graph is locally finite). One reason this is done is that without these conditions one immediately gets
 $\lambda_{\mathrm{c}} = 0$
(and
$\lambda_{\mathrm{c}} = 0$
(and
 $p_{\mathrm{c}}=0$
). If one wishes to study behaviour at or around
$p_{\mathrm{c}}=0$
). If one wishes to study behaviour at or around
 $\lambda_{\mathrm{c}}$
then many properties then become trivial. Proposition 2.1 shows that uniqueness of the infinite cluster is not one of these properties. Condition (2.26) ensures that every vertex almost surely has infinite degree (forcing
$\lambda_{\mathrm{c}}$
then many properties then become trivial. Proposition 2.1 shows that uniqueness of the infinite cluster is not one of these properties. Condition (2.26) ensures that every vertex almost surely has infinite degree (forcing
 $\lambda_{\mathrm{c}}=0$
), but the proposition identifies conditions under which there are still infinitely many infinite clusters. That is, the resulting graph is not locally finite and yet there is still structure worth studying.
$\lambda_{\mathrm{c}}=0$
), but the proposition identifies conditions under which there are still infinitely many infinite clusters. That is, the resulting graph is not locally finite and yet there is still structure worth studying.
Remark 2.4. It is worth commenting on the difficulty that arises when trying to prove that the critical exponents take their mean-field values for the weight-dependent models. In each of the cases described by the kernels (2.20)–(2.24), the expected degree of a vertex can be made arbitrarily large by taking the mark to be arbitrarily close to 0. The argument presented here aims to show that the triangle diagram,
 $\triangle_\lambda$
(see Definition 4.1), is small enough at criticality to use the result of Caicedo and Dickson [Reference Caicedo and Dickson9] to prove that the critical exponents take their mean-field values. However, the presence of the
$\triangle_\lambda$
(see Definition 4.1), is small enough at criticality to use the result of Caicedo and Dickson [Reference Caicedo and Dickson9] to prove that the critical exponents take their mean-field values. However, the presence of the
 $\textrm{ess sup}$
in the expression for
$\textrm{ess sup}$
in the expression for
 $\triangle_\lambda$
means that
$\triangle_\lambda$
means that
 $\triangle_\lambda=\infty$
for these weight-dependent models. If we were to expect that some types of weight-dependent RCMs could exhibit mean-field behaviour, then it is apparent that this particular form of the triangle condition is too strong. The presence of the
$\triangle_\lambda=\infty$
for these weight-dependent models. If we were to expect that some types of weight-dependent RCMs could exhibit mean-field behaviour, then it is apparent that this particular form of the triangle condition is too strong. The presence of the
 $\textrm{ess sup}$
in Assumption 4 has similar issues.
$\textrm{ess sup}$
in Assumption 4 has similar issues.
2.4. Background
Bernoulli bond percolation on
 $\mathbb Z^d$
with nearest neighbour edges is the archetypal percolation model and naturally has a very large collection of literature. A standard ergodicity and trifurcation argument proves that there is almost surely at most one infinite connected cluster (see [Reference Grimmett18]). Furthermore, by coupling with BBP on a Bethe lattice, Aizenman and Newman [Reference Aizenman and Newman2] proved that if the triangle condition holds then the susceptibility critical exponent exists and takes its mean-field value. Similarly, Aizenman and Barsky [Reference Aizenman and Barsky1], [Reference Barsky and Aizenman3] showed that other critical exponents take their mean-field values under the triangle condition. The matter of whether the triangle condition held was considered in [Reference Hara and Slade25], in which a lace expansion argument was used to show that the triangle condition holds for so-called ‘spread-out’ models when
$\mathbb Z^d$
with nearest neighbour edges is the archetypal percolation model and naturally has a very large collection of literature. A standard ergodicity and trifurcation argument proves that there is almost surely at most one infinite connected cluster (see [Reference Grimmett18]). Furthermore, by coupling with BBP on a Bethe lattice, Aizenman and Newman [Reference Aizenman and Newman2] proved that if the triangle condition holds then the susceptibility critical exponent exists and takes its mean-field value. Similarly, Aizenman and Barsky [Reference Aizenman and Barsky1], [Reference Barsky and Aizenman3] showed that other critical exponents take their mean-field values under the triangle condition. The matter of whether the triangle condition held was considered in [Reference Hara and Slade25], in which a lace expansion argument was used to show that the triangle condition holds for so-called ‘spread-out’ models when
 $d>6$
, and in the nearest neighbour model for
$d>6$
, and in the nearest neighbour model for
 $d>d^*$
for some
$d>d^*$
for some
 $d^*\geq 6$
. Currently, the best upper bound for this upper critical dimension is
$d^*\geq 6$
. Currently, the best upper bound for this upper critical dimension is
 $d^*\leq 10$
by Fitzner and van der Hofstad [Reference Fitzner and van der Hofstad15].
$d^*\leq 10$
by Fitzner and van der Hofstad [Reference Fitzner and van der Hofstad15].
The questions of BBP can also be asked on graphs other than the usual
 $\mathbb Z^d$
. Benjamini and Schramm [Reference Benjamini and Schramm6] provide an early study of BBP on locally finite Cayley graphs, quasi-transitive graphs, and planar graphs. In particular, they conjectured that, for BBP on locally finite non-amenable quasi-transitive graphs, there is a non-empty interval of bond probabilities that produces infinitely many infinite clusters almost surely. For non-amenable finitely generated groups, Pak and Smirnova-Nagnibeda [Reference Pak and Smirnova-Nagnibeda35] proved every non-amenable group has a Cayley graph such that the associated BBP model has a non-empty non-uniqueness phase, and Nachmias and Peres [Reference Nachmias and Peres34] proved the existence of this phase if the Cayley graph has sufficiently high girth (i.e. sufficiently long shortest cycle). Likewise, Benjamini and Schramm [Reference Benjamini and Schramm7] and Hutchcroft [Reference Hutchcroft26] proved that a non-uniqueness phase exists for locally finite non-amenable transitive planar single-ended graphs and locally finite non-amenable quasi-transitive locally finite Gromov hyperbolic graphs, respectively. In particular, Hutchcroft [Reference Hutchcroft26] used an operator description of the two-point function and a geometric result that they called a ‘hyperbolic magic lemma’ that they derived from the so-called ‘magic lemma’ of [Reference Benjamini and Schramm8] to prove this non-uniqueness.
$\mathbb Z^d$
. Benjamini and Schramm [Reference Benjamini and Schramm6] provide an early study of BBP on locally finite Cayley graphs, quasi-transitive graphs, and planar graphs. In particular, they conjectured that, for BBP on locally finite non-amenable quasi-transitive graphs, there is a non-empty interval of bond probabilities that produces infinitely many infinite clusters almost surely. For non-amenable finitely generated groups, Pak and Smirnova-Nagnibeda [Reference Pak and Smirnova-Nagnibeda35] proved every non-amenable group has a Cayley graph such that the associated BBP model has a non-empty non-uniqueness phase, and Nachmias and Peres [Reference Nachmias and Peres34] proved the existence of this phase if the Cayley graph has sufficiently high girth (i.e. sufficiently long shortest cycle). Likewise, Benjamini and Schramm [Reference Benjamini and Schramm7] and Hutchcroft [Reference Hutchcroft26] proved that a non-uniqueness phase exists for locally finite non-amenable transitive planar single-ended graphs and locally finite non-amenable quasi-transitive locally finite Gromov hyperbolic graphs, respectively. In particular, Hutchcroft [Reference Hutchcroft26] used an operator description of the two-point function and a geometric result that they called a ‘hyperbolic magic lemma’ that they derived from the so-called ‘magic lemma’ of [Reference Benjamini and Schramm8] to prove this non-uniqueness.
For percolation on finite graphs, the question of the uniqueness of the infinite component becomes a question of the relative sizes of the two largest components. In [Reference Bollobás, Janson and Riordan4], this question was answered for inhomogeneous random graphs, in which each edge in the complete graph of n vertices is given a mark from a finite measure space and the edge between two vertices is open independently with a probability given by a kernel function (that varies with n to close in on critical behaviour). Under the assumption that the kernel is ‘irreducible’ and an assumption that ensures that the expected number of edges is ‘what it should be,’ they prove that the largest component is of order n with high probability, while the second largest component is
 $o\left(n\right)$
.
$o\left(n\right)$
.
Regarding critical exponents, Schonmann [Reference Schonmann37] showed that the triangle condition holds for locally finite graphs with a sufficiently high Cheeger constant, and used this to prove that various mean-field critical exponents are attained. Schonmann [Reference Schonmann38] was then able to do this for non-amenable transitive locally finite single-ended graphs without resorting to the triangle condition, instead using the dual graph to find a separating barrier between clusters. For certain regular tessellations of two- and three-dimensional hyperbolic spaces, Madras and Wu [Reference Madras and Wu33] adapted this approach by using the geometric result that a positive fraction of the vertices in a finite cluster will be on the boundary of the convex hull of the cluster. In addition to the non-uniqueness phase, Hutchcroft [Reference Hutchcroft26] and Nachmias and Peres [Reference Nachmias and Peres34] both derived mean-field critical exponents in their respective regimes by bounding the triangle diagram. For Hutchcroft [Reference Hutchcroft26], this came naturally from their operator description.
For RCMs on
 $\mathbb R^d\times\mathcal E$
, many of the results that applied to BBP on
$\mathbb R^d\times\mathcal E$
, many of the results that applied to BBP on
 $\mathbb Z^d$
can be adapted. Meester and Roy [Reference Meester and Roy32] considered unmarked RCMs with rotation invariant and decreasing adjacency functions, showing that there was no non-uniqueness regime. This was generalised to marked RCMs (also removing the requirement of being rotation invariant and decreasing) in [Reference Chebunin and Last10], by using the amenability of
$\mathbb Z^d$
can be adapted. Meester and Roy [Reference Meester and Roy32] considered unmarked RCMs with rotation invariant and decreasing adjacency functions, showing that there was no non-uniqueness regime. This was generalised to marked RCMs (also removing the requirement of being rotation invariant and decreasing) in [Reference Chebunin and Last10], by using the amenability of
 $\mathbb R^d$
to show that clusters in such models on
$\mathbb R^d$
to show that clusters in such models on
 $\mathbb R^d\times\mathcal E$
are deletion tolerant. Then under a natural irreducibility assumption they proved that this property is equivalent to having no non-uniqueness phase.
$\mathbb R^d\times\mathcal E$
are deletion tolerant. Then under a natural irreducibility assumption they proved that this property is equivalent to having no non-uniqueness phase.
The lace expansion argument was adapted by Heydenreich et al. [Reference Heydenreich, van der Hofstad, Last and Matzke22] to show that (an appropriate version) of the triangle condition holds for ‘spread-out’ RCMs on
 $\mathbb R^d$
when
$\mathbb R^d$
when
 $d>6$
, and otherwise for
$d>6$
, and otherwise for
 $d>d^*$
for some
$d>d^*$
for some
 $d^*\geq 6$
. In contrast to the lattice version, no effort has been made to optimize
$d^*\geq 6$
. In contrast to the lattice version, no effort has been made to optimize
 $d^*$
in this context. They then demonstrated the utility of this triangle condition by using it to prove that the susceptibility critical exponent takes its mean-field value. For marked RCMs on
$d^*$
in this context. They then demonstrated the utility of this triangle condition by using it to prove that the susceptibility critical exponent takes its mean-field value. For marked RCMs on
 $\mathbb R^d\times\mathcal E$
, the lace expansion argument was performed by Dickson and Heydenreich [Reference Dickson and Heydenreich11], in which a version of the triangle condition was proven to hold for sufficiently high dimensions. This was then used by Caicedo and Dickson [Reference Caicedo and Dickson9] to show that certain critical exponents take mean-field values in sufficiently high dimensions.
$\mathbb R^d\times\mathcal E$
, the lace expansion argument was performed by Dickson and Heydenreich [Reference Dickson and Heydenreich11], in which a version of the triangle condition was proven to hold for sufficiently high dimensions. This was then used by Caicedo and Dickson [Reference Caicedo and Dickson9] to show that certain critical exponents take mean-field values in sufficiently high dimensions.
Let us now review RCMs on
 ${\mathbb{H}^d}$
. For the specific case of the Boolean disc model with a fixed radius (variously also called Poisson Boolean model, Gilbert disc model, etc.) on
${\mathbb{H}^d}$
. For the specific case of the Boolean disc model with a fixed radius (variously also called Poisson Boolean model, Gilbert disc model, etc.) on
 ${\mathbb{H}^d}$
, Tykesson [Reference Tykesson39] proved that there is a non-uniqueness phase if
${\mathbb{H}^d}$
, Tykesson [Reference Tykesson39] proved that there is a non-uniqueness phase if
 $d=2$
or if
$d=2$
or if
 $d\geq 3$
and the radius of the discs is sufficiently large. This was achieved by finding infinite geodesic rays from a point that are contained in the vacant set of the vertices’ discs. In [Reference Dickson and Heydenreich12] the geometric arguments of [Reference Madras and Wu33] have been adapted to show that a wide variety of RCMs on
$d\geq 3$
and the radius of the discs is sufficiently large. This was achieved by finding infinite geodesic rays from a point that are contained in the vacant set of the vertices’ discs. In [Reference Dickson and Heydenreich12] the geometric arguments of [Reference Madras and Wu33] have been adapted to show that a wide variety of RCMs on
 ${\mathbb{H}^2}$
and
${\mathbb{H}^2}$
and
 $\mathbb{H}^3$
exhibit mean-field critical exponents. As in the work of Madras and Wu [Reference Madras and Wu33], the argument could not be made to work for
$\mathbb{H}^3$
exhibit mean-field critical exponents. As in the work of Madras and Wu [Reference Madras and Wu33], the argument could not be made to work for
 $d\geq 4$
.
$d\geq 4$
.
The study of RCMs on
 ${\mathbb{H}^d}$
(or
${\mathbb{H}^d}$
(or
 ${\mathbb{H}^d}\times\mathcal E$
) is not only relevant for itself, but may also have applications for RCMs on
${\mathbb{H}^d}\times\mathcal E$
) is not only relevant for itself, but may also have applications for RCMs on
 $\mathbb R^d\times\mathcal E$
. It is described in [Reference van der Hofstad24] how a (Boolean disc) RCM on
$\mathbb R^d\times\mathcal E$
. It is described in [Reference van der Hofstad24] how a (Boolean disc) RCM on
 ${\mathbb{H}^2}$
can be interpreted as a one-dimensional product geometric inhomogeneous random graph (a form of RCM on
${\mathbb{H}^2}$
can be interpreted as a one-dimensional product geometric inhomogeneous random graph (a form of RCM on
 $\mathbb R\times\mathcal E$
). Hyperbolic embeddings of complex networks have also attracted much attention in themselves: Boguná et al [Reference Boguná, Papadopoulos and Krioukov5] models the internet by embedding it in
$\mathbb R\times\mathcal E$
). Hyperbolic embeddings of complex networks have also attracted much attention in themselves: Boguná et al [Reference Boguná, Papadopoulos and Krioukov5] models the internet by embedding it in
 ${\mathbb{H}^2}$
.
${\mathbb{H}^2}$
.
The novelty in this work is that not only do we consider marked hyperbolic RCMs (i.e. RCMs on the ambient space
 ${\mathbb{H}^d}\times\mathcal E$
) for any
${\mathbb{H}^d}\times\mathcal E$
) for any
 $d\geq 2$
, but we show non-uniqueness (Theorem 2.1) and mean-field critical exponents (Theorem 2.2) by using spherical transforms—a technique with no obvious analog in the Bernoulli percolation or RCM literature. The ability of this approach to deal with models that almost surely produce non-locally finite graphs is also demonstrated in Proposition 2.1. The non-local finiteness of the resulting graph is emphasised here because all the references above are only concerned with models that produce locally finite graphs (by having the original graph being locally finite or by having an integrable adjacency function). This came from natural assumptions for them because they wished to analyse the percolation transition (and so needed it to be non-zero), but in our case we are studying a super-critical behaviour that makes sense even if the graph ends up not being locally finite. Note that Proposition 2.1 also provides a non-perturbative result—an advantage over the main Theorems 2.1 and 2.2. Nevertheless, these main theorems are perturbative like the works of [Reference Nachmias and Peres34], [Reference Pak and Smirnova-Nagnibeda35], [Reference Schonmann37], [Reference Tykesson39] for
$d\geq 2$
, but we show non-uniqueness (Theorem 2.1) and mean-field critical exponents (Theorem 2.2) by using spherical transforms—a technique with no obvious analog in the Bernoulli percolation or RCM literature. The ability of this approach to deal with models that almost surely produce non-locally finite graphs is also demonstrated in Proposition 2.1. The non-local finiteness of the resulting graph is emphasised here because all the references above are only concerned with models that produce locally finite graphs (by having the original graph being locally finite or by having an integrable adjacency function). This came from natural assumptions for them because they wished to analyse the percolation transition (and so needed it to be non-zero), but in our case we are studying a super-critical behaviour that makes sense even if the graph ends up not being locally finite. Note that Proposition 2.1 also provides a non-perturbative result—an advantage over the main Theorems 2.1 and 2.2. Nevertheless, these main theorems are perturbative like the works of [Reference Nachmias and Peres34], [Reference Pak and Smirnova-Nagnibeda35], [Reference Schonmann37], [Reference Tykesson39] for
 $d\geq 3$
, and [Reference Heydenreich, van der Hofstad, Last and Matzke22], [Reference Hara and Slade25] in considering spread-out models.
$d\geq 3$
, and [Reference Heydenreich, van der Hofstad, Last and Matzke22], [Reference Hara and Slade25] in considering spread-out models.
3. Preliminaries
Here are some extra details and remarks on some of the objects that appeared in the results.
3.1. Hyperbolic space
The (hyperbolic-)isometries of
 $\mathbb{B}$
can be characterized by Möbius transformations (that is, finite compositions of reflections). Every isometry of
$\mathbb{B}$
can be characterized by Möbius transformations (that is, finite compositions of reflections). Every isometry of
 $\mathbb{B}$
extends to a unique Möbius transformation of
$\mathbb{B}$
extends to a unique Möbius transformation of
 $\mathbb{B}$
, and every Möbius transformation restricts to an isometry of
$\mathbb{B}$
, and every Möbius transformation restricts to an isometry of
 $\mathbb{B}$
(see [Reference Ratcliffe36]). If we denote
$\mathbb{B}$
(see [Reference Ratcliffe36]). If we denote
 $\partial \mathbb{B}\,:\!=\, \left\{x\in\mathbb R^d\colon \lvert {x}\rvert=1\right\}$
then the orientation-preserving isometries can be classified by the number of fixed points of the associated Möbius transformation in
$\partial \mathbb{B}\,:\!=\, \left\{x\in\mathbb R^d\colon \lvert {x}\rvert=1\right\}$
then the orientation-preserving isometries can be classified by the number of fixed points of the associated Möbius transformation in
 $\mathbb{B}$
and in
$\mathbb{B}$
and in
 $\partial\mathbb{B}$
. These isometries are sometimes called:
$\partial\mathbb{B}$
. These isometries are sometimes called:
-
• rotations if they fix a point in
$\mathbb{B}$
, -
• horolations if they fix no point in
$\mathbb{B}$
but a unique point in
$\partial\mathbb{B}$
, -
• translations if they fix no point in
$\mathbb{B}$
but fix two points in
$\partial\mathbb{B}$
.





These classes are often called ‘elliptic’, ‘parabolic’, and ‘hyperbolic’, respectively, but we will prefer the former terms to avoid overloading the term ‘hyperbolic.’ Note that while in
 $\mathbb R^d$
rotations cannot be expressed as a composition of translations, in
$\mathbb R^d$
rotations cannot be expressed as a composition of translations, in
 ${\mathbb{H}^d}$
all orientation-preserving isometries can be expressed as the composition of two translations (see, for example, [Reference Martin31, Exercise 29.13]).
${\mathbb{H}^d}$
all orientation-preserving isometries can be expressed as the composition of two translations (see, for example, [Reference Martin31, Exercise 29.13]).
The decision to make the edge probability only depend on the spatial distance between the vertices (see (2.2)) and not the full possibilities of the unordered pair
 $\left\{x,y\right\}$
is no great restriction. If we want our edge law to be spatially homogeneous (i.e. there is no special spatial position), then we require that
$\left\{x,y\right\}$
is no great restriction. If we want our edge law to be spatially homogeneous (i.e. there is no special spatial position), then we require that
 $\varphi(x,a,y,b) = \varphi(t(x),a,t(y),b)$
for all
$\varphi(x,a,y,b) = \varphi(t(x),a,t(y),b)$
for all
 $x,y\in{\mathbb{H}^d}$
,
$x,y\in{\mathbb{H}^d}$
,
 $a,b\in \mathcal E$
, and translations t. However, since all rotations and horolations can be expressed as the product of two translations, we then know that
$a,b\in \mathcal E$
, and translations t. However, since all rotations and horolations can be expressed as the product of two translations, we then know that
 $\varphi(x,a,y,b) = \varphi(i(x),a,i(y),b)$
for all
$\varphi(x,a,y,b) = \varphi(i(x),a,i(y),b)$
for all
 $x,y\in{\mathbb{H}^d}$
,
$x,y\in{\mathbb{H}^d}$
,
 $a,b\in \mathcal E$
, and orientation-preserving isometry i. Therefore, for all
$a,b\in \mathcal E$
, and orientation-preserving isometry i. Therefore, for all
 $r\geq 0$
,
$r\geq 0$
,
 $a,b\in\mathcal E$
, and
$a,b\in\mathcal E$
, and
 $x,y\in\{u\in{\mathbb{H}^d}\colon \mathrm{dist}_{{\mathbb{H}^d}}\left(u,o\right)=r\}$
, we have
$x,y\in\{u\in{\mathbb{H}^d}\colon \mathrm{dist}_{{\mathbb{H}^d}}\left(u,o\right)=r\}$
, we have
 $\varphi(x,a,o,b)=\varphi(y,a,o,b)$
and the edge probabilities are of the form
$\varphi(x,a,o,b)=\varphi(y,a,o,b)$
and the edge probabilities are of the form
 $\varphi(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b)$
in (2.2).
$\varphi(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b)$
in (2.2).
The use of the hyperbolic measure
 $\mu$
ensures that the vertex distribution is invariant under the isometries, and since the positions of the vertices only influence the edge probability through their metric distance, the distribution
$\mu$
ensures that the vertex distribution is invariant under the isometries, and since the positions of the vertices only influence the edge probability through their metric distance, the distribution
 $\mathbb{P}_\lambda$
of the whole graph
$\mathbb{P}_\lambda$
of the whole graph
 $\xi$
is also invariant under these isometries. Note that we have no such assumed symmetries in the marks other than the trivial transposition of the marks (which is required since the event
$\xi$
is also invariant under these isometries. Note that we have no such assumed symmetries in the marks other than the trivial transposition of the marks (which is required since the event
 $\mathbf{x}\sim \mathbf{y}$
is itself symmetric).
$\mathbf{x}\sim \mathbf{y}$
is itself symmetric).
The symmetries of the hyperbolic spaces can also be viewed through identifying with the coset space
 \begin{equation*} SO\left(d,1\right) / O(d).\end{equation*}
\begin{equation*} SO\left(d,1\right) / O(d).\end{equation*}
Specifically,
 ${\mathbb{H}^d}$
can be realised as the symmetric space of the simple Lie group SO(d,1). It is this description as a symmetric space that allows us to use spherical transforms (see [Reference Helgason20]).
${\mathbb{H}^d}$
can be realised as the symmetric space of the simple Lie group SO(d,1). It is this description as a symmetric space that allows us to use spherical transforms (see [Reference Helgason20]).
3.2. Connections and augmentations
Given two distinct vertices
 $\mathbf{x},\mathbf{y}\in\eta$
, we say that
$\mathbf{x},\mathbf{y}\in\eta$
, we say that
 $\mathbf{x}$
is connected to
$\mathbf{x}$
is connected to
 $\mathbf{y}$
in
$\mathbf{y}$
in
 $\xi$
(written ‘
$\xi$
(written ‘
 $\mathbf{x} \longleftrightarrow \mathbf{y}\:\textrm {in}\: \xi$
’) if there is a finite sequence of distinct vertices
$\mathbf{x} \longleftrightarrow \mathbf{y}\:\textrm {in}\: \xi$
’) if there is a finite sequence of distinct vertices
 $\mathbf{x}=\mathbf{v}_0,\mathbf{v}_1,\ldots,\mathbf{v}_{k-1},\mathbf{v}_k=\mathbf{y}\in\eta$
such that
$\mathbf{x}=\mathbf{v}_0,\mathbf{v}_1,\ldots,\mathbf{v}_{k-1},\mathbf{v}_k=\mathbf{y}\in\eta$
such that
 $\mathbf{v}_i\sim \mathbf{v}_{i+1}$
for all
$\mathbf{v}_i\sim \mathbf{v}_{i+1}$
for all
 $i=0,\ldots,k-1$
.
$i=0,\ldots,k-1$
.
For
 $\mathbf{x}\in{\mathbb{H}^d}\times\mathcal E$
, we use
$\mathbf{x}\in{\mathbb{H}^d}\times\mathcal E$
, we use
 $\eta^{\mathbf{x}}$
and
$\eta^{\mathbf{x}}$
and
 $\xi^{\mathbf{x}}$
to denote the vertex set and graph that have been augmented by
$\xi^{\mathbf{x}}$
to denote the vertex set and graph that have been augmented by
 $\mathbf{x}$
. For
$\mathbf{x}$
. For
 $\eta^{\mathbf{x}}$
, this simply means that
$\eta^{\mathbf{x}}$
, this simply means that
 $\eta^{\mathbf{x}}\,:\!=\,\eta\cup\left\{\mathbf{x}\right\}$
. For
$\eta^{\mathbf{x}}\,:\!=\,\eta\cup\left\{\mathbf{x}\right\}$
. For
 $\xi^{\mathbf{x}}$
, this also includes the (random) edges between
$\xi^{\mathbf{x}}$
, this also includes the (random) edges between
 $\mathbf{x}$
and the vertices already present in
$\mathbf{x}$
and the vertices already present in
 $\eta$
. This can naturally be generalised to produce
$\eta$
. This can naturally be generalised to produce
 $\eta^{\mathbf{x}_1,\ldots,\mathbf{x}_k}$
and
$\eta^{\mathbf{x}_1,\ldots,\mathbf{x}_k}$
and
 $\xi^{\mathbf{x}_1,\ldots,\mathbf{x}_k}$
for any finite k. A more precise and complete description of this augmenting procedure can be found in [Reference Heydenreich, van der Hofstad, Last and Matzke22]. This augmenting procedure allows us to define the two-point function as
$\xi^{\mathbf{x}_1,\ldots,\mathbf{x}_k}$
for any finite k. A more precise and complete description of this augmenting procedure can be found in [Reference Heydenreich, van der Hofstad, Last and Matzke22]. This augmenting procedure allows us to define the two-point function as
 \begin{equation*} \tau_\lambda(\mathbf{x},\mathbf{y})\,:\!=\, \mathbb{P}_\lambda\left(\mathbf{x} \longleftrightarrow \mathbf{y}\:\textrm {in}\: \xi^{\mathbf{x},\mathbf{y}}\right). \end{equation*}
\begin{equation*} \tau_\lambda(\mathbf{x},\mathbf{y})\,:\!=\, \mathbb{P}_\lambda\left(\mathbf{x} \longleftrightarrow \mathbf{y}\:\textrm {in}\: \xi^{\mathbf{x},\mathbf{y}}\right). \end{equation*}
Since
 $\mathbb P_\lambda$
is
$\mathbb P_\lambda$
is
 ${\mathbb{H}^d}$
-isometry invariant, so is
${\mathbb{H}^d}$
-isometry invariant, so is
 $\tau_\lambda$
. Therefore, we will often write
$\tau_\lambda$
. Therefore, we will often write
 $\tau_\lambda((x,a),(y,b)) = \tau_\lambda(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b)$
and treat
$\tau_\lambda((x,a),(y,b)) = \tau_\lambda(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b)$
and treat
 $\tau_\lambda$
as a
$\tau_\lambda$
as a
 $\mathbb R_+\times\mathcal E^2\to[0,1]$
function like
$\mathbb R_+\times\mathcal E^2\to[0,1]$
function like
 $\varphi$
. When we are talking about the two-point function of a model using a scaled adjacency function,
$\varphi$
. When we are talking about the two-point function of a model using a scaled adjacency function,
 $\varphi_L$
, we denote it by
$\varphi_L$
, we denote it by
 $\tau_{\lambda,L}$
. Note that this does not mean that
$\tau_{\lambda,L}$
. Note that this does not mean that
 $\tau_{\lambda,L}$
is just
$\tau_{\lambda,L}$
is just
 $\tau_\lambda$
with the distance scaled by some
$\tau_\lambda$
with the distance scaled by some
 $\sigma_L$
though.
$\sigma_L$
though.
3.3. Operators
Let
 $\left(\mathbb X,\mathcal{X}\right)$
be a Borel space with an associated non-atomic
$\left(\mathbb X,\mathcal{X}\right)$
be a Borel space with an associated non-atomic
 $\sigma$
-finite measure
$\sigma$
-finite measure
 $\nu$
. Let
$\nu$
. Let
 $\varphi\colon \mathbb X\times\mathbb X\to[0,1]$
be
$\varphi\colon \mathbb X\times\mathbb X\to[0,1]$
be
 $\mathcal X\times\mathcal X$
-measurable, and let
$\mathcal X\times\mathcal X$
-measurable, and let
 $\mathbb P_\lambda$
denote the law of the RCM on
$\mathbb P_\lambda$
denote the law of the RCM on
 $\mathbb X$
with intensity measure
$\mathbb X$
with intensity measure
 $\lambda\nu$
and adjacency function
$\lambda\nu$
and adjacency function
 $\varphi$
.
$\varphi$
.
Let
 $\psi\colon \mathbb X\times\mathbb X\to\mathbb R_+$
be
$\psi\colon \mathbb X\times\mathbb X\to\mathbb R_+$
be
 $\mathcal X\times\mathcal X$
-measurable. Then define
$\mathcal X\times\mathcal X$
-measurable. Then define
 $\mathcal{D}(\psi)\subset \mathbb R^\mathbb X$
to be the set of
$\mathcal{D}(\psi)\subset \mathbb R^\mathbb X$
to be the set of
 $f\in\mathbb R^\mathbb X$
such that
$f\in\mathbb R^\mathbb X$
such that
 $\int_{\mathbb X}\psi(\mathbf{x},\mathbf{y})\lvert f(\mathbf{y}) \rvert\nu(\mathrm{d} \mathbf{y})<\infty$
for
$\int_{\mathbb X}\psi(\mathbf{x},\mathbf{y})\lvert f(\mathbf{y}) \rvert\nu(\mathrm{d} \mathbf{y})<\infty$
for
 $\nu$
-almost every
$\nu$
-almost every
 $\mathbf{x}\in\mathbb X$
, so that
$\mathbf{x}\in\mathbb X$
, so that
 \begin{equation} \left(\Psi f\right)(\mathbf{x}) \,:\!=\, \int_{\mathbb X}\psi(\mathbf{x},\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y})\end{equation}
\begin{equation} \left(\Psi f\right)(\mathbf{x}) \,:\!=\, \int_{\mathbb X}\psi(\mathbf{x},\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y})\end{equation}
defines a linear operator
 $\Psi\colon \mathcal{D}(\psi)\to \mathbb R^\mathbb X$
. For each
$\Psi\colon \mathcal{D}(\psi)\to \mathbb R^\mathbb X$
. For each
 $p,q\in[1,\infty]$
, the
$p,q\in[1,\infty]$
, the
 $L^p\to L^q$
operator norm of
$L^p\to L^q$
operator norm of
 $\Psi$
is defined by
$\Psi$
is defined by
 \begin{equation} \lVert \Psi \rVert_{p\to q} \,:\!=\, \begin{cases} +\infty &\text{if }L^p(\mathbb X)\not\subset \mathcal{D}(\psi), \\[8pt] \displaystyle\sup\left\{\frac{\lVert \Psi f \rVert_q}{\lVert f \rVert_p}\colon f\in L^p(\mathbb X),f\ne 0\right\} &\text{otherwise.} \end{cases}\end{equation}
\begin{equation} \lVert \Psi \rVert_{p\to q} \,:\!=\, \begin{cases} +\infty &\text{if }L^p(\mathbb X)\not\subset \mathcal{D}(\psi), \\[8pt] \displaystyle\sup\left\{\frac{\lVert \Psi f \rVert_q}{\lVert f \rVert_p}\colon f\in L^p(\mathbb X),f\ne 0\right\} &\text{otherwise.} \end{cases}\end{equation}
Let
 $\mathcal{T}_\lambda$
and
$\mathcal{T}_\lambda$
and
 $\varPhi$
be the linear operators constructed in this way from
$\varPhi$
be the linear operators constructed in this way from
 $\tau_\lambda$
and
$\tau_\lambda$
and
 $\varphi$
, respectively. We can define the operator critical thresholds to be
$\varphi$
, respectively. We can define the operator critical thresholds to be
 \begin{equation*} \lambda_{p\to q} \,:\!=\, \inf\{\lambda>0\colon \lVert \mathcal{T}_\lambda \rVert_{p\to q} = \infty\}\end{equation*}
\begin{equation*} \lambda_{p\to q} \,:\!=\, \inf\{\lambda>0\colon \lVert \mathcal{T}_\lambda \rVert_{p\to q} = \infty\}\end{equation*}
for each
 $p,q\in[1,\infty]$
. In Lemma 4.1, these are bounded by comparing the two-point function
$p,q\in[1,\infty]$
. In Lemma 4.1, these are bounded by comparing the two-point function
 $\tau_\lambda$
to the Green’s function of a branching process with offspring density
$\tau_\lambda$
to the Green’s function of a branching process with offspring density
 $\lambda\varphi$
:
$\lambda\varphi$
:
 \begin{equation*} g_\lambda(\mathbf{x},\mathbf{y}) \,:\!=\, \sum^\infty_{n=1}\lambda^{n-1}\varphi^{\star n}(\mathbf{x},\mathbf{y}).\end{equation*}
\begin{equation*} g_\lambda(\mathbf{x},\mathbf{y}) \,:\!=\, \sum^\infty_{n=1}\lambda^{n-1}\varphi^{\star n}(\mathbf{x},\mathbf{y}).\end{equation*}
Here
 $\star$
denotes convolution. That is, given functions
$\star$
denotes convolution. That is, given functions
 $f_1,f_2\colon \mathbb X\times\mathbb X\to \mathbb R_+$
define
$f_1,f_2\colon \mathbb X\times\mathbb X\to \mathbb R_+$
define
 \begin{equation*} f_1\star f_2(\mathbf{x},\mathbf{y}) \,:\!=\, \int_{\mathbb{X}} f_1(\mathbf{x},\mathbf{u})f_2(\mathbf{u},\mathbf{y})\nu\left(\mathrm{d} \mathbf{u}\right),\end{equation*}
\begin{equation*} f_1\star f_2(\mathbf{x},\mathbf{y}) \,:\!=\, \int_{\mathbb{X}} f_1(\mathbf{x},\mathbf{u})f_2(\mathbf{u},\mathbf{y})\nu\left(\mathrm{d} \mathbf{u}\right),\end{equation*}
and similarly,
 $f^{\star n}_1(\mathbf{x},\mathbf{y})$
by performing this iteratively. Also observe that while
$f^{\star n}_1(\mathbf{x},\mathbf{y})$
by performing this iteratively. Also observe that while
 $\varPhi^{n}$
is defined as the iterated application of the operator
$\varPhi^{n}$
is defined as the iterated application of the operator
 $\varPhi$
, it is also equal to the operator constructed from the function
$\varPhi$
, it is also equal to the operator constructed from the function
 $\varphi^{\star n}$
.
$\varphi^{\star n}$
.
4. Operator bounds
In this section we prove the lemmata that do not depend on the hyperbolic structure of the spatial component of the ambient space. The scaling
 $\sigma_L$
will also not be relevant in this section, so L is omitted from the notation.
$\sigma_L$
will also not be relevant in this section, so L is omitted from the notation.
Recall
 $\left(\mathbb X,\mathcal{X}\right)$
denotes a Borel space with an associated non-atomic
$\left(\mathbb X,\mathcal{X}\right)$
denotes a Borel space with an associated non-atomic
 $\sigma$
-finite measure
$\sigma$
-finite measure
 $\nu$
.
$\nu$
.
Lemma 4.1. For all
 $p\in[1,\infty]$
,
$p\in[1,\infty]$
,
 \begin{equation*} \lambda_{p\to p} \geq \frac{1}{\lVert \varPhi \rVert_{p\to p}}. \end{equation*}
\begin{equation*} \lambda_{p\to p} \geq \frac{1}{\lVert \varPhi \rVert_{p\to p}}. \end{equation*}
Proof. We first note the relation that, for
 $\lambda>0$
and
$\lambda>0$
and
 $\nu$
-almost all
$\nu$
-almost all
 $\mathbf{x},\mathbf{y}\in\mathbb X$
,
$\mathbf{x},\mathbf{y}\in\mathbb X$
,
 \begin{equation} \tau_\lambda(\mathbf{x},\mathbf{y}) \leq g_\lambda(\mathbf{x},\mathbf{y}). \end{equation}
\begin{equation} \tau_\lambda(\mathbf{x},\mathbf{y}) \leq g_\lambda(\mathbf{x},\mathbf{y}). \end{equation}
This was established in the proof of [Reference Caicedo and Dickson9, Lemma 2.2] using a ‘method of generations’ approach. The neighbours of the starting vertex
 $\mathbf{y}$
are distributed as a Poisson point process with intensity measure
$\mathbf{y}$
are distributed as a Poisson point process with intensity measure
 $\lambda\varphi(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x})$
. These vertices are the ‘first generation.’ The ‘second generation’ are the vertices that are adjacent to the first generation, but not adjacent to
$\lambda\varphi(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x})$
. These vertices are the ‘first generation.’ The ‘second generation’ are the vertices that are adjacent to the first generation, but not adjacent to
 $\mathbf{y}$
. These are also distributed according to a Poisson point process, but the intensity measure is now a thinned measure whose density with respect to
$\mathbf{y}$
. These are also distributed according to a Poisson point process, but the intensity measure is now a thinned measure whose density with respect to
 $\nu$
is less than or equal to
$\nu$
is less than or equal to
 $\lambda^2\varphi^{\star 2}(\mathbf{x},\mathbf{y})$
. This can then be repeated for any generation. By Mecke’s formula (Lemma 4.2 below) and monotone convergence, we then find that, for any measurable
$\lambda^2\varphi^{\star 2}(\mathbf{x},\mathbf{y})$
. This can then be repeated for any generation. By Mecke’s formula (Lemma 4.2 below) and monotone convergence, we then find that, for any measurable
 $B\subset \mathbb X$
,
$B\subset \mathbb X$
,
 \begin{equation*} \lambda\int_B\tau_\lambda(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x}) = \mathbb E_\lambda\left[\#\left\{\mathbf{u}\in\eta\cap B\colon \mathbf{y} \longleftrightarrow \mathbf{u}\:\textrm {in}\: \xi^{\mathbf{y}}\right\}\right] \leq \sum^\infty_{n=1}\lambda^n\int_B\varphi^{\star n}(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x}). \end{equation*}
\begin{equation*} \lambda\int_B\tau_\lambda(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x}) = \mathbb E_\lambda\left[\#\left\{\mathbf{u}\in\eta\cap B\colon \mathbf{y} \longleftrightarrow \mathbf{u}\:\textrm {in}\: \xi^{\mathbf{y}}\right\}\right] \leq \sum^\infty_{n=1}\lambda^n\int_B\varphi^{\star n}(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x}). \end{equation*}
The relation (4.1) then follows.
To arrive at the result, we make the elementary observation that if
 $\psi_1\geq\psi_2\geq 0$
$\psi_1\geq\psi_2\geq 0$
 $\nu$
-everywhere then their corresponding operators follow the partial ordering
$\nu$
-everywhere then their corresponding operators follow the partial ordering
 $\lVert {\Psi_1}\rVert_{p\to p}\geq \lVert {\Psi_2}\rVert_{p\to p}$
for every
$\lVert {\Psi_1}\rVert_{p\to p}\geq \lVert {\Psi_2}\rVert_{p\to p}$
for every
 $p\in\left[1,+\infty\right]$
. Then (4.1), the triangle inequality, and the sub-multiplicativity of the operator norm imply that
$p\in\left[1,+\infty\right]$
. Then (4.1), the triangle inequality, and the sub-multiplicativity of the operator norm imply that
 \begin{equation} \lVert \mathcal{T}_\lambda \rVert_{p\to p} \leq \lVert \mathcal{G}_\lambda \rVert_{p\to p} \leq \sum^{\infty}_{n=1}\lambda^{n-1}\lVert \varPhi^n \rVert_{p\to p} \leq \sum^{\infty}_{n=1}\lambda^{n-1}\lVert \varPhi \rVert_{p\to p}^n. \end{equation}
\begin{equation} \lVert \mathcal{T}_\lambda \rVert_{p\to p} \leq \lVert \mathcal{G}_\lambda \rVert_{p\to p} \leq \sum^{\infty}_{n=1}\lambda^{n-1}\lVert \varPhi^n \rVert_{p\to p} \leq \sum^{\infty}_{n=1}\lambda^{n-1}\lVert \varPhi \rVert_{p\to p}^n. \end{equation}
This upper bound is finite if
 $\lambda\lVert \varPhi \rVert_{p\to p}<1$
, and so the result follows.
$\lambda\lVert \varPhi \rVert_{p\to p}<1$
, and so the result follows.
Lemma 4.2. (Mecke’s formula.) Given
 $m\in\mathbb N$
and a measurable non-negative f,
$m\in\mathbb N$
and a measurable non-negative f,
 \begin{equation} \mathbb E_\lambda \left[ \sum_{\vec {\mathbf{x}} \in \eta^{(m)}} f(\xi, \vec{\mathbf{x}})\right] = \lambda^m \int \mathbb E_\lambda\left[ f\left(\xi^{\mathbf{x}_1, \ldots, \mathbf{x}_m}, \vec {\mathbf{x}}\right)\right] \nu^{\otimes m}(\mathrm{d} \vec{\mathbf{x}}), \end{equation}
\begin{equation} \mathbb E_\lambda \left[ \sum_{\vec {\mathbf{x}} \in \eta^{(m)}} f(\xi, \vec{\mathbf{x}})\right] = \lambda^m \int \mathbb E_\lambda\left[ f\left(\xi^{\mathbf{x}_1, \ldots, \mathbf{x}_m}, \vec {\mathbf{x}}\right)\right] \nu^{\otimes m}(\mathrm{d} \vec{\mathbf{x}}), \end{equation}
where
 $\vec{\mathbf{x}}=(\mathbf{x}_1,\ldots,\mathbf{x}_m)$
,
$\vec{\mathbf{x}}=(\mathbf{x}_1,\ldots,\mathbf{x}_m)$
,
 $\eta^{(m)}=\{(\mathbf{x}_1,\ldots,\mathbf{x}_m)\colon x_i \in \eta, \mathbf{x}_i \neq \mathbf{x}_j \text{ for } i \neq j\}$
, and
$\eta^{(m)}=\{(\mathbf{x}_1,\ldots,\mathbf{x}_m)\colon x_i \in \eta, \mathbf{x}_i \neq \mathbf{x}_j \text{ for } i \neq j\}$
, and
 $\nu^{\otimes m}$
is the m-product measure of
$\nu^{\otimes m}$
is the m-product measure of
 $\nu$
on
$\nu$
on
 $\mathbb X^m$
.
$\mathbb X^m$
.
Proof. A proof and discussion of Mecke’s formula can be found in [Reference Last and Penrose30, Chapter 4].
For the following lemma, we can generalise the definition of
 $\lambda_T$
in (2.4) to our more general space. For
$\lambda_T$
in (2.4) to our more general space. For
 $\mathbf{x}\in\mathbb X$
,
$\mathbf{x}\in\mathbb X$
,
 \begin{align} \chi_{\lambda}(\mathbf{x})&= \mathbb E_{\lambda}\left[\#\mathscr {C}\left(\mathbf{x},\xi^{\mathbf{x}}\right)\right],\\[-10pt]\nonumber\end{align}
\begin{align} \chi_{\lambda}(\mathbf{x})&= \mathbb E_{\lambda}\left[\#\mathscr {C}\left(\mathbf{x},\xi^{\mathbf{x}}\right)\right],\\[-10pt]\nonumber\end{align}
 \begin{align} \lambda_T &= \inf\left\{\lambda>0\colon \textrm{ess sup}_{\mathbf{x}\in\mathbb X}\chi_{\lambda}(\mathbf{x})=\infty\right\}.\end{align}
\begin{align} \lambda_T &= \inf\left\{\lambda>0\colon \textrm{ess sup}_{\mathbf{x}\in\mathbb X}\chi_{\lambda}(\mathbf{x})=\infty\right\}.\end{align}
In the case
 $\mathbb X={\mathbb{H}^d}\times\mathcal E$
, the transitive symmetry of the model in
$\mathbb X={\mathbb{H}^d}\times\mathcal E$
, the transitive symmetry of the model in
 ${\mathbb{H}^d}$
ensures that we recover the previous definition. The norm
${\mathbb{H}^d}$
ensures that we recover the previous definition. The norm
 $\left\lVert\cdot\right\rVert_\textrm{HS}$
in the following lemma is called the Hilbert–Schmidt norm.
$\left\lVert\cdot\right\rVert_\textrm{HS}$
in the following lemma is called the Hilbert–Schmidt norm.
Lemma 4.3. For all linear operators
 $\Psi\colon \mathcal{D}(\psi)\to \mathbb R^\mathbb X$
defined as in (3.1),
$\Psi\colon \mathcal{D}(\psi)\to \mathbb R^\mathbb X$
defined as in (3.1),
 \begin{align*} \lVert {\Psi}\rVert_{1\to 1} &= {\mathrm{ ess sup}}_{\mathbf{y}\in\mathbb X}\int_{\mathbb{X}}\lvert {\psi(\mathbf{x},\mathbf{y})}\rvert\nu(\mathrm{d} \mathbf{x}),\\ \lVert {\Psi}\rVert_{2\to 2} &\leq \left\lVert\Psi\right\rVert_\textrm{HS}\,:\!=\, \left(\int_{\mathbb{X}}\int_{\mathbb{X}}\lvert {\psi(\mathbf{x},\mathbf{y})}\rvert^2\nu(\mathrm{d} \mathbf{x})\nu(\mathrm{d} \mathbf{y})\right)^{{1}/{2}}. \end{align*}
\begin{align*} \lVert {\Psi}\rVert_{1\to 1} &= {\mathrm{ ess sup}}_{\mathbf{y}\in\mathbb X}\int_{\mathbb{X}}\lvert {\psi(\mathbf{x},\mathbf{y})}\rvert\nu(\mathrm{d} \mathbf{x}),\\ \lVert {\Psi}\rVert_{2\to 2} &\leq \left\lVert\Psi\right\rVert_\textrm{HS}\,:\!=\, \left(\int_{\mathbb{X}}\int_{\mathbb{X}}\lvert {\psi(\mathbf{x},\mathbf{y})}\rvert^2\nu(\mathrm{d} \mathbf{x})\nu(\mathrm{d} \mathbf{y})\right)^{{1}/{2}}. \end{align*}
In particular, this means that
 \begin{equation*} \lambda_T = \lambda_{1\to 1}. \end{equation*}
\begin{equation*} \lambda_T = \lambda_{1\to 1}. \end{equation*}
Proof. The first two are standard results. The first follows immediately from considering test functions approximating delta functions, while the second follows by applying a Cauchy–Schwarz inequality to
 $\lVert {\Psi f}\rVert_{2}$
in (3.2).
$\lVert {\Psi f}\rVert_{2}$
in (3.2).
The equality of the critical intensities then follows from Mecke’s formula:
 \begin{align*} \textrm{ess sup}_{\mathbf{y}\in\mathbb X}\chi_{\lambda}(\mathbf{y}) &= 1+ \textrm{ess sup}_{\mathbf{y}\in\mathbb X}\mathbb E_{\lambda}\left[\sum_{\mathbf{x}\in\eta}\unicode{x1D7D9}_{\left\{\mathbf{x} \longleftrightarrow \mathbf{y}\:\textrm {in}\: \xi^{\mathbf{y}}\right\}}\right] \\ &= 1+ \lambda\textrm{ ess sup}_{\mathbf{y}\in\mathbb X}\int_{\mathbb{X}}\tau_\lambda(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x}) \\ &= 1+ \lambda\lVert {\mathcal{T}_\lambda}\rVert_{1\to 1}. \end{align*}
\begin{align*} \textrm{ess sup}_{\mathbf{y}\in\mathbb X}\chi_{\lambda}(\mathbf{y}) &= 1+ \textrm{ess sup}_{\mathbf{y}\in\mathbb X}\mathbb E_{\lambda}\left[\sum_{\mathbf{x}\in\eta}\unicode{x1D7D9}_{\left\{\mathbf{x} \longleftrightarrow \mathbf{y}\:\textrm {in}\: \xi^{\mathbf{y}}\right\}}\right] \\ &= 1+ \lambda\textrm{ ess sup}_{\mathbf{y}\in\mathbb X}\int_{\mathbb{X}}\tau_\lambda(\mathbf{x},\mathbf{y})\nu(\mathrm{d} \mathbf{x}) \\ &= 1+ \lambda\lVert {\mathcal{T}_\lambda}\rVert_{1\to 1}. \end{align*}
This completes the proof.
A crucial object in our derivation of mean-field critical exponents is the triangle diagram.
Definition 4.1. For
 $\lambda\geq0$
, the triangle diagram is defined as
$\lambda\geq0$
, the triangle diagram is defined as
 \begin{equation*} \triangle_\lambda \,:\!=\, \lambda^2\textrm{ ess sup}_{\mathbf{x},\mathbf{y}\in\mathbb X}\tau_\lambda^{\star 3}(\mathbf{x},\mathbf{y}). \end{equation*}
\begin{equation*} \triangle_\lambda \,:\!=\, \lambda^2\textrm{ ess sup}_{\mathbf{x},\mathbf{y}\in\mathbb X}\tau_\lambda^{\star 3}(\mathbf{x},\mathbf{y}). \end{equation*}
Lemma 4.4. If
 ${\mathrm{ess sup}}_{\mathbf{x}\in\mathbb X}\int_{\mathbb X}\varphi(\mathbf{x},\mathbf{y})^2\nu(\mathrm{d} \mathbf{y})<\infty$
and
${\mathrm{ess sup}}_{\mathbf{x}\in\mathbb X}\int_{\mathbb X}\varphi(\mathbf{x},\mathbf{y})^2\nu(\mathrm{d} \mathbf{y})<\infty$
and
 $\lambda<\lambda_{2\to 2}$
, then
$\lambda<\lambda_{2\to 2}$
, then
 $\triangle_\lambda<\infty$
.
$\triangle_\lambda<\infty$
.
Proof. Here we want to bound
 $\triangle_\lambda$
using the operator norm
$\triangle_\lambda$
using the operator norm
 $\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}$
, which we know to be finite because
$\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}$
, which we know to be finite because
 $\lambda<\lambda_{2\to 2}$
. The issue is that while we can approximate the essential suprema in the definition of
$\lambda<\lambda_{2\to 2}$
. The issue is that while we can approximate the essential suprema in the definition of
 $\triangle_\lambda$
using
$\triangle_\lambda$
using
 $\mathcal{T}_\lambda$
and suitable test functions, the 2-norms of these test functions may blow up as we improve the approximation. We avoid this issue by using factors of
$\mathcal{T}_\lambda$
and suitable test functions, the 2-norms of these test functions may blow up as we improve the approximation. We avoid this issue by using factors of
 $\varphi$
to mollify this blow up.
$\varphi$
to mollify this blow up.
In [Reference Dickson and Heydenreich11, Lemma F.1] it was proven using Mecke’s formula that
 \begin{align*} \tau_\lambda(\mathbf{x},\mathbf{y}) &\leq \varphi(\mathbf{x},\mathbf{y}) + \lambda\varphi\star\tau_\lambda(\mathbf{x},\mathbf{y}),\\ \tau_\lambda(\mathbf{x},\mathbf{y}) &\leq \varphi(\mathbf{x},\mathbf{y}) + \lambda\tau_\lambda\star \varphi(\mathbf{x},\mathbf{y}) \end{align*}
\begin{align*} \tau_\lambda(\mathbf{x},\mathbf{y}) &\leq \varphi(\mathbf{x},\mathbf{y}) + \lambda\varphi\star\tau_\lambda(\mathbf{x},\mathbf{y}),\\ \tau_\lambda(\mathbf{x},\mathbf{y}) &\leq \varphi(\mathbf{x},\mathbf{y}) + \lambda\tau_\lambda\star \varphi(\mathbf{x},\mathbf{y}) \end{align*}
both hold for all
 $\lambda>0$
and
$\lambda>0$
and
 $\mathbf{x},\mathbf{y}\in\mathbb X$
. By then applying these inequalities to the first and last factors in
$\mathbf{x},\mathbf{y}\in\mathbb X$
. By then applying these inequalities to the first and last factors in
 $\tau_\lambda^{\star 3}$
, we get
$\tau_\lambda^{\star 3}$
, we get
 \begin{equation*} \tau_\lambda^{\star 3}(\mathbf{x},\mathbf{y}) \leq \varphi\star\tau_\lambda\star\varphi(\mathbf{x},\mathbf{y}) + 2\lambda\varphi\star\tau_\lambda^{\star 2}\star\varphi(\mathbf{x},\mathbf{y}) + \lambda^2\varphi\star\tau_\lambda^{\star 3}\star\varphi(\mathbf{x},\mathbf{y}) \end{equation*}
\begin{equation*} \tau_\lambda^{\star 3}(\mathbf{x},\mathbf{y}) \leq \varphi\star\tau_\lambda\star\varphi(\mathbf{x},\mathbf{y}) + 2\lambda\varphi\star\tau_\lambda^{\star 2}\star\varphi(\mathbf{x},\mathbf{y}) + \lambda^2\varphi\star\tau_\lambda^{\star 3}\star\varphi(\mathbf{x},\mathbf{y}) \end{equation*}
for all
 $\lambda>0$
and
$\lambda>0$
and
 $\mathbf{x},\mathbf{y}\in\mathbb X$
.
$\mathbf{x},\mathbf{y}\in\mathbb X$
.
By applying [Reference Dickson and Heydenreich11, Lemma F.2] to our case, we find that for all
 $\varepsilon>0$
and
$\varepsilon>0$
and
 $M\in\textrm{ ess.Im}(\tau_\lambda^{\star 3})$
(i.e. the essential image), there exist
$M\in\textrm{ ess.Im}(\tau_\lambda^{\star 3})$
(i.e. the essential image), there exist
 $\nu$
-positive and finite sets
$\nu$
-positive and finite sets
 $E_1,E_2\subset \mathbb X$
such that
$E_1,E_2\subset \mathbb X$
such that
 \begin{equation*} f_i\,:\!=\, \frac{1}{\nu\left(E_i\right)}\unicode{x1D7D9}_{E_i} \end{equation*}
\begin{equation*} f_i\,:\!=\, \frac{1}{\nu\left(E_i\right)}\unicode{x1D7D9}_{E_i} \end{equation*}
for
 $i=1,2$
satisfy
$i=1,2$
satisfy
 \begin{equation*} \lvert {M - \big\langle\, f_1, \mathcal{T}_\lambda^3f_2 \big\rangle}\rvert\leq \varepsilon. \end{equation*}
\begin{equation*} \lvert {M - \big\langle\, f_1, \mathcal{T}_\lambda^3f_2 \big\rangle}\rvert\leq \varepsilon. \end{equation*}
Here
 $\langle\, f, g \rangle\,:\!=\,\int_{\mathbb{X}} f(\mathbf{x})\overline{g(\mathbf{x})}\nu(\mathrm{d} \mathbf{x})$
denotes the inner product of two functions
$\langle\, f, g \rangle\,:\!=\,\int_{\mathbb{X}} f(\mathbf{x})\overline{g(\mathbf{x})}\nu(\mathrm{d} \mathbf{x})$
denotes the inner product of two functions
 $f,g\in L^2(\mathbb X)$
.
$f,g\in L^2(\mathbb X)$
.
Now since
 $f_1,f_2\geq 0$
everywhere, we arrive at
$f_1,f_2\geq 0$
everywhere, we arrive at
 \begin{equation*} \big\langle\, f_1, \mathcal{T}_\lambda^3f_2 \big\rangle \leq \langle\, f_1, \big(\varPhi\mathcal{T}_\lambda\varPhi + 2\lambda\varPhi\mathcal{T}_\lambda^2\varPhi + \lambda^2\varPhi\mathcal{T}_\lambda^3\varPhi\big)f_2 \rangle. \end{equation*}
\begin{equation*} \big\langle\, f_1, \mathcal{T}_\lambda^3f_2 \big\rangle \leq \langle\, f_1, \big(\varPhi\mathcal{T}_\lambda\varPhi + 2\lambda\varPhi\mathcal{T}_\lambda^2\varPhi + \lambda^2\varPhi\mathcal{T}_\lambda^3\varPhi\big)f_2 \rangle. \end{equation*}
Observe that if
 $\lVert {\varPhi}\rVert_{2\to 2}=\infty$
then
$\lVert {\varPhi}\rVert_{2\to 2}=\infty$
then
 $\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}=\infty$
for all
$\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}=\infty$
for all
 $\lambda>0$
and, therefore,
$\lambda>0$
and, therefore,
 $\lambda_{2\to 2}=0$
. Therefore, under our assumptions
$\lambda_{2\to 2}=0$
. Therefore, under our assumptions
 $\varPhi$
is a bounded operator, and therefore, the symmetry of
$\varPhi$
is a bounded operator, and therefore, the symmetry of
 $\varphi$
implies that
$\varphi$
implies that
 $\varPhi\colon L^2(\mathbb X)\to L^2(\mathbb X)$
is self-adjoint. This self-adjointness, the Cauchy–Schwarz inequality, the triangle inequality, and the sub-multiplicativity of the operator norm lead to
$\varPhi\colon L^2(\mathbb X)\to L^2(\mathbb X)$
is self-adjoint. This self-adjointness, the Cauchy–Schwarz inequality, the triangle inequality, and the sub-multiplicativity of the operator norm lead to
 \begin{equation*} \big\langle\, f_1, \mathcal{T}_\lambda^3f_2 \big\rangle \leq \big(\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2} + 2\lambda\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}^2 + \lambda^2\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}^3\big)\lVert {\varPhi f_1}\rVert_2 \lVert {\varPhi f_2}\rVert_2. \end{equation*}
\begin{equation*} \big\langle\, f_1, \mathcal{T}_\lambda^3f_2 \big\rangle \leq \big(\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2} + 2\lambda\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}^2 + \lambda^2\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}^3\big)\lVert {\varPhi f_1}\rVert_2 \lVert {\varPhi f_2}\rVert_2. \end{equation*}
Then we can write, for
 $i=1,2$
, that
$i=1,2$
, that
 \begin{align*} \lVert {\varPhi f_i}\rVert_2^2 &= \int_{\mathbb{X}}\int_{\mathbb{X}}\int_{\mathbb{X}} f_i(\mathbf{x})\varphi(\mathbf{x},\mathbf{y})\varphi(\mathbf{y},\mathbf{z})f_i(\mathbf{z})\nu(\mathrm{d} \mathbf{z})\nu(\mathrm{d} \mathbf{y})\nu(\mathrm{d} \mathbf{x}) \\ &\leq \lVert {f_i}\rVert^2_1\textrm{ ess sup}_{\mathbf{x},\mathbf{z}\in\mathbb X}\varphi^{\star 2}(\mathbf{x},\mathbf{z}) \\ &\leq \textrm{ess sup}_{\mathbf{x}\in\mathbb X}\int_{\mathbb X}\varphi(\mathbf{x},\mathbf{y})^2\nu(\mathrm{d} \mathbf{y}) \\ &<\infty. \end{align*}
\begin{align*} \lVert {\varPhi f_i}\rVert_2^2 &= \int_{\mathbb{X}}\int_{\mathbb{X}}\int_{\mathbb{X}} f_i(\mathbf{x})\varphi(\mathbf{x},\mathbf{y})\varphi(\mathbf{y},\mathbf{z})f_i(\mathbf{z})\nu(\mathrm{d} \mathbf{z})\nu(\mathrm{d} \mathbf{y})\nu(\mathrm{d} \mathbf{x}) \\ &\leq \lVert {f_i}\rVert^2_1\textrm{ ess sup}_{\mathbf{x},\mathbf{z}\in\mathbb X}\varphi^{\star 2}(\mathbf{x},\mathbf{z}) \\ &\leq \textrm{ess sup}_{\mathbf{x}\in\mathbb X}\int_{\mathbb X}\varphi(\mathbf{x},\mathbf{y})^2\nu(\mathrm{d} \mathbf{y}) \\ &<\infty. \end{align*}
Finally, since
 $\lambda<\lambda_{2\to 2}$
, we know that
$\lambda<\lambda_{2\to 2}$
, we know that
 $\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}<\infty$
and, therefore,
$\lVert {\mathcal{T}_\lambda}\rVert_{2\to 2}<\infty$
and, therefore,
 $\triangle_\lambda<\infty$
.
$\triangle_\lambda<\infty$
.
5. Spherical transform
We now restrict our attention to
 $\mathbb X={\mathbb{H}^d}$
, and consider transforms of radial functions. Since we will be requiring this rotational symmetry, it will be convenient to write explicit expressions in terms of the Poincarè disc model. Letting
$\mathbb X={\mathbb{H}^d}$
, and consider transforms of radial functions. Since we will be requiring this rotational symmetry, it will be convenient to write explicit expressions in terms of the Poincarè disc model. Letting
 \begin{equation*} \mathbb{B} \,:\!=\, \{z\in\mathbb R^d\colon \lvert {z}\rvert<1\},\end{equation*}
\begin{equation*} \mathbb{B} \,:\!=\, \{z\in\mathbb R^d\colon \lvert {z}\rvert<1\},\end{equation*}
the hyperbolic volume element on
 $\mathbb{B}$
is given by
$\mathbb{B}$
is given by
 \begin{equation*} \mathbf{d}z = \frac{4}{(1-\lvert {z}\rvert^2)^2}\mathrm{d} z.\end{equation*}
\begin{equation*} \mathbf{d}z = \frac{4}{(1-\lvert {z}\rvert^2)^2}\mathrm{d} z.\end{equation*}
We also let
 $\mathbb{S}^{d-1} = \{z\in\mathbb R^d\colon \lvert {z}\rvert=1\}$
denote the Euclidean sphere.
$\mathbb{S}^{d-1} = \{z\in\mathbb R^d\colon \lvert {z}\rvert=1\}$
denote the Euclidean sphere.
Definition 5.1. Let
 $C^\infty_c(\mathbb{B})$
denote the set of smooth functions on
$C^\infty_c(\mathbb{B})$
denote the set of smooth functions on
 $\mathbb{B}$
with compact support (with respect to the hyperbolic metric), and
$\mathbb{B}$
with compact support (with respect to the hyperbolic metric), and
 $C^\infty_{c,\natural}(\mathbb{B})$
denote the subset of such functions that are symmetric with respect to rotations about the origin o.
$C^\infty_{c,\natural}(\mathbb{B})$
denote the subset of such functions that are symmetric with respect to rotations about the origin o.
Given a radial function
 $g\colon \mathbb{B}\to \mathbb R_+$
, converting into polar coordinates (with a minor abuse of notation) gives the expression
$g\colon \mathbb{B}\to \mathbb R_+$
, converting into polar coordinates (with a minor abuse of notation) gives the expression
 \begin{equation*} \int_{\mathbb{B}} g(z)\,\mathbf{d}z = \mathfrak{S}_{d-1}\int^1_0 g(\varrho)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2}\mathrm{d} \varrho,\end{equation*}
\begin{equation*} \int_{\mathbb{B}} g(z)\,\mathbf{d}z = \mathfrak{S}_{d-1}\int^1_0 g(\varrho)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2}\mathrm{d} \varrho,\end{equation*}
where
 $\mathfrak{S}_{d-1}$
denotes the (Lebesgue)
$\mathfrak{S}_{d-1}$
denotes the (Lebesgue)
 $(d-1)$
-volume of the unit-radius sphere
$(d-1)$
-volume of the unit-radius sphere
 ${\mathbb{S}^{d-1}}$
.
${\mathbb{S}^{d-1}}$
.
For
 $g\in C^\infty_{c}(\mathbb{B})$
,
$g\in C^\infty_{c}(\mathbb{B})$
,
 $s\in\mathbb R$
and
$s\in\mathbb R$
and
 $b\in {\mathbb{S}^{d-1}}$
, we define the spherical transform to be
$b\in {\mathbb{S}^{d-1}}$
, we define the spherical transform to be
 \begin{equation*} \widetilde{g}(s,b) \,:\!=\, \int_{\mathbb{B}}g(z)\mathrm{e}^{\left(-is+({d-1})/{2}\right)A(z,b)}\frac{4}{\left(1-\lvert z \rvert^2\right)^2}\mathrm{d} z, \end{equation*}
\begin{equation*} \widetilde{g}(s,b) \,:\!=\, \int_{\mathbb{B}}g(z)\mathrm{e}^{\left(-is+({d-1})/{2}\right)A(z,b)}\frac{4}{\left(1-\lvert z \rvert^2\right)^2}\mathrm{d} z, \end{equation*}
where
 \begin{equation*} A(z,b) \,:\!=\, \log \frac{1-\lvert z \rvert^2}{\lvert z-b \rvert^2} \end{equation*}
\begin{equation*} A(z,b) \,:\!=\, \log \frac{1-\lvert z \rvert^2}{\lvert z-b \rvert^2} \end{equation*}
is the composite distance between o and the horocycle with normal b and passing through z.
Remark 5.1. The spherical transform for
 ${\mathbb{H}^2}$
is given explicitly in [Reference Helgason21]. The general expression for symmetric spaces can be found in [Reference Helgason20], from which the expression of the
${\mathbb{H}^2}$
is given explicitly in [Reference Helgason21]. The general expression for symmetric spaces can be found in [Reference Helgason20], from which the expression of the
 ${\mathbb{H}^d}$
spherical transform for
${\mathbb{H}^d}$
spherical transform for
 $d\geq 3$
can be deduced.
$d\geq 3$
can be deduced.
If
 $g\in C^\infty_{c,\natural}(\mathbb{B})$
, the expression for the spherical transform is b invariant and reduces to
$g\in C^\infty_{c,\natural}(\mathbb{B})$
, the expression for the spherical transform is b invariant and reduces to
 \begin{align*} \widetilde{g}(s) &\,:\!=\, \mathfrak{S}_{d-2}\int^1_0 g(\varrho)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \left(\int^{\pi}_0\left(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos\theta} \right)^{({d-1})/{2}-is}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta\right)\mathrm{d} \varrho \\ &= \mathfrak{S}_{d-1}\int^1_0 g(\varrho)Q^{\mathbb{B}}_d(\varrho;\,s)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2}\mathrm{d} \varrho, \end{align*}
\begin{align*} \widetilde{g}(s) &\,:\!=\, \mathfrak{S}_{d-2}\int^1_0 g(\varrho)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \left(\int^{\pi}_0\left(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos\theta} \right)^{({d-1})/{2}-is}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta\right)\mathrm{d} \varrho \\ &= \mathfrak{S}_{d-1}\int^1_0 g(\varrho)Q^{\mathbb{B}}_d(\varrho;\,s)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2}\mathrm{d} \varrho, \end{align*}
where, for
 $\varrho\in\left[0,1\right)$
,
$\varrho\in\left[0,1\right)$
,
 $d\geq 2$
and
$d\geq 2$
and
 $s\in\mathbb R$
, we define
$s\in\mathbb R$
, we define
 \begin{equation} Q^{\mathbb{B}}_d(\varrho;\,s)\,:\!=\, \frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\int^{\pi}_0\left(\frac{1-\varrho^2} {1+\varrho^2-2\varrho\cos\theta}\right)^{{(d-1)}/{2}-is}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta.\end{equation}
\begin{equation} Q^{\mathbb{B}}_d(\varrho;\,s)\,:\!=\, \frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\int^{\pi}_0\left(\frac{1-\varrho^2} {1+\varrho^2-2\varrho\cos\theta}\right)^{{(d-1)}/{2}-is}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta.\end{equation}
Note that, for
 $s=0$
, the integrand is real and strictly positive for all
$s=0$
, the integrand is real and strictly positive for all
 $\varrho\in\left[0,1\right)$
and
$\varrho\in\left[0,1\right)$
and
 $\theta\in\left(0,\pi\right)$
, and therefore,
$\theta\in\left(0,\pi\right)$
, and therefore,
 $Q^{\mathbb{B}}_d(\varrho;\,0)>0$
for all
$Q^{\mathbb{B}}_d(\varrho;\,0)>0$
for all
 $\varrho\in\left[0,1\right)$
. Furthermore,
$\varrho\in\left[0,1\right)$
. Furthermore,
 \begin{equation} Q^{\mathbb{B}}_d(0;\,s) = \frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\int^\pi_{0}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta = 1\end{equation}
\begin{equation} Q^{\mathbb{B}}_d(0;\,s) = \frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\int^\pi_{0}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta = 1\end{equation}
for all
 $d\geq 2$
and
$d\geq 2$
and
 $s\in\mathbb R$
.
$s\in\mathbb R$
.
It will sometimes be convenient to describe
 $Q^{\mathbb{B}}_d(\varrho;\,0)$
in terms of the hyperbolic distance rather than the Euclidean distance on
$Q^{\mathbb{B}}_d(\varrho;\,0)$
in terms of the hyperbolic distance rather than the Euclidean distance on
 $\mathbb{B}$
. To this end, let us use (2.1) to define
$\mathbb{B}$
. To this end, let us use (2.1) to define
 $Q_d\colon \mathbb R_+\to\mathbb R_+$
by
$Q_d\colon \mathbb R_+\to\mathbb R_+$
by
 \begin{equation} Q_d(r)\,:\!=\, Q^{\mathbb{B}}_d\Big(\tanh\frac{r}{2};\,0\Big).\end{equation}
\begin{equation} Q_d(r)\,:\!=\, Q^{\mathbb{B}}_d\Big(\tanh\frac{r}{2};\,0\Big).\end{equation}
While the above definition of
 $\widetilde{g}(s,b)$
and
$\widetilde{g}(s,b)$
and
 $\widetilde{g}(s)$
was given for
$\widetilde{g}(s)$
was given for
 $g\in C^\infty_{c}(\mathbb{B})$
and
$g\in C^\infty_{c}(\mathbb{B})$
and
 $C^\infty_{c,\natural}(\mathbb{B})$
functions, respectively, these definition can naturally be extended to
$C^\infty_{c,\natural}(\mathbb{B})$
functions, respectively, these definition can naturally be extended to
 \begin{align*} \mathfrak{D}(\mathbb{B}) &\,:\!=\, \left\{g\colon \mathbb{B}\to \mathbb R \:\left\vert\: \int_{\mathbb{B}}\lvert {g(z)}\rvert\mathrm{e}^{({(d-1)}/{2})A(z,b)}\frac{1}{(1-\lvert z \rvert^2)^2}\mathrm{d} z<\infty\right.\right\}, \\ \mathfrak{D}_\natural(\mathbb{B}) &\,:\!=\, \left\{g\in\mathfrak{D}(\mathbb{B}) \:\left\vert\: g \:\text{is invariant under rotations about}\: o\right.\right\}\end{align*}
\begin{align*} \mathfrak{D}(\mathbb{B}) &\,:\!=\, \left\{g\colon \mathbb{B}\to \mathbb R \:\left\vert\: \int_{\mathbb{B}}\lvert {g(z)}\rvert\mathrm{e}^{({(d-1)}/{2})A(z,b)}\frac{1}{(1-\lvert z \rvert^2)^2}\mathrm{d} z<\infty\right.\right\}, \\ \mathfrak{D}_\natural(\mathbb{B}) &\,:\!=\, \left\{g\in\mathfrak{D}(\mathbb{B}) \:\left\vert\: g \:\text{is invariant under rotations about}\: o\right.\right\}\end{align*}
by using dominated convergence. An alternative expression for
 $\mathfrak{D}_\natural(\mathbb{B})$
is
$\mathfrak{D}_\natural(\mathbb{B})$
is
 \begin{multline} \mathfrak{D}_\natural(\mathbb{B}) = \left\{g\colon \mathbb{B}\to \mathbb R \:\left\vert\:g \:\text{is invariant under rotations about}\: o, \right.\right.\\\left.\left.\:\text{and}\: \int^1_0\lvert {g\left(\varrho\right)}\rvert Q^\mathbb{B}_d(\varrho;\,0) \frac{\varrho^{d-1}}{(1-\varrho^2)^2}\mathrm{d} \varrho<\infty\right.\right\}.\end{multline}
\begin{multline} \mathfrak{D}_\natural(\mathbb{B}) = \left\{g\colon \mathbb{B}\to \mathbb R \:\left\vert\:g \:\text{is invariant under rotations about}\: o, \right.\right.\\\left.\left.\:\text{and}\: \int^1_0\lvert {g\left(\varrho\right)}\rvert Q^\mathbb{B}_d(\varrho;\,0) \frac{\varrho^{d-1}}{(1-\varrho^2)^2}\mathrm{d} \varrho<\infty\right.\right\}.\end{multline}
Lemma 5.1. For all
 $d\geq 2$
,
$d\geq 2$
,
 $\lim_{\varrho\nearrow 1}Q^{\mathbb{B}}_d(\varrho;\,0)=0$
. In particular, there exist
$\lim_{\varrho\nearrow 1}Q^{\mathbb{B}}_d(\varrho;\,0)=0$
. In particular, there exist
 $c_d\in(0,\infty)$
such that
$c_d\in(0,\infty)$
such that
 \begin{equation*} Q^{\mathbb{B}}_d(\varrho;\,0) \leq c_d\left(1-\varrho\right)^{{(d-1)}/{2}}\left(1\vee\lvert {\log\left(1-\varrho\right)}\rvert\right). \end{equation*}
\begin{equation*} Q^{\mathbb{B}}_d(\varrho;\,0) \leq c_d\left(1-\varrho\right)^{{(d-1)}/{2}}\left(1\vee\lvert {\log\left(1-\varrho\right)}\rvert\right). \end{equation*}
Equivalently, there exist
 $c'_d\in(0,\infty)$
such that
$c'_d\in(0,\infty)$
such that
 \begin{equation*} Q_d(r) \leq c'_d \left(1\vee r\right) \exp\big(-\tfrac{1}{2}(d-1)r\big). \end{equation*}
\begin{equation*} Q_d(r) \leq c'_d \left(1\vee r\right) \exp\big(-\tfrac{1}{2}(d-1)r\big). \end{equation*}
Proof. First observe that by a double angle formula and appropriate substitutions,
 \begin{align*} Q^{\mathbb{B}}_d(\varrho;\,0) & = \frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho^2} {1+\varrho^2}\right)^{{(d-1)}/{2}}\int^{\pi}_0\left(1-\frac{2\varrho} {1+\varrho^2}\cos\theta\right)^{-{(d-1)}/{2}}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta \nonumber\\ & =\frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho^2} {\left(1-\varrho\right)^2}\right)^{{(d-1)}/{2}}\int^{{\pi}/{2}}_0 \left(1+\frac{4\varrho}{\left(1-\varrho\right)^2}({\sin}\, t)^2\right)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t \nonumber\\ & =\frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho^2} {\left(1+\varrho\right)^2}\right)^{{(d-1)}/{2}}\int^{{\pi}/{2}}_0 \left(1-\frac{4\varrho}{\left(1+\varrho\right)^2}({\sin}\, t)^2\right)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t \nonumber\\ & =\frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho} {1+\varrho}\right)^{{(d-1)}/{2}}J_d\left(\frac{4\varrho}{\left(1+\varrho\right)^2}\right), \end{align*}
\begin{align*} Q^{\mathbb{B}}_d(\varrho;\,0) & = \frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho^2} {1+\varrho^2}\right)^{{(d-1)}/{2}}\int^{\pi}_0\left(1-\frac{2\varrho} {1+\varrho^2}\cos\theta\right)^{-{(d-1)}/{2}}\left({\sin}\, \theta\right)^{d-2}\mathrm{d} \theta \nonumber\\ & =\frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho^2} {\left(1-\varrho\right)^2}\right)^{{(d-1)}/{2}}\int^{{\pi}/{2}}_0 \left(1+\frac{4\varrho}{\left(1-\varrho\right)^2}({\sin}\, t)^2\right)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t \nonumber\\ & =\frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho^2} {\left(1+\varrho\right)^2}\right)^{{(d-1)}/{2}}\int^{{\pi}/{2}}_0 \left(1-\frac{4\varrho}{\left(1+\varrho\right)^2}({\sin}\, t)^2\right)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t \nonumber\\ & =\frac{\mathfrak{S}_{d-2}}{\mathfrak{S}_{d-1}}\left(\frac{1-\varrho} {1+\varrho}\right)^{{(d-1)}/{2}}J_d\left(\frac{4\varrho}{\left(1+\varrho\right)^2}\right), \end{align*}
where
 \begin{equation*} J_d(m) \,:\!=\, \int^{{\pi}/{2}}_0\big(1-m({\sin}\, t)^2\big)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t. \end{equation*}
\begin{equation*} J_d(m) \,:\!=\, \int^{{\pi}/{2}}_0\big(1-m({\sin}\, t)^2\big)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t. \end{equation*}
Note that
 $J_2(m)$
is the elliptic integral of the first kind. Also note that
$J_2(m)$
is the elliptic integral of the first kind. Also note that
 $J_3(m)$
can be evaluated by integration by substitution to obtain
$J_3(m)$
can be evaluated by integration by substitution to obtain
 \begin{equation*} J_3(m) = -\frac{2}{m}\log\left(1-m\right), \end{equation*}
\begin{equation*} J_3(m) = -\frac{2}{m}\log\left(1-m\right), \end{equation*}
and (since
 $\mathfrak{S}_1=2\pi$
,
$\mathfrak{S}_1=2\pi$
,
 $\mathfrak{S}_2=4\pi$
, and
$\mathfrak{S}_2=4\pi$
, and
 $\varrho=\tanh{r}/{2}$
) this produces
$\varrho=\tanh{r}/{2}$
) this produces
 \begin{equation*} Q^{\mathbb{B}}_3(\varrho;\,0) = \frac{1-\varrho^2}{2\varrho}\log\frac{1+\varrho}{1-\varrho}, \qquad Q_3(r) = \frac{r}{\sinh r}. \end{equation*}
\begin{equation*} Q^{\mathbb{B}}_3(\varrho;\,0) = \frac{1-\varrho^2}{2\varrho}\log\frac{1+\varrho}{1-\varrho}, \qquad Q_3(r) = \frac{r}{\sinh r}. \end{equation*}
Similarly, by integration by substitution and long division it is possible to evaluate
 $Q^\mathbb{B}_d$
for any odd
$Q^\mathbb{B}_d$
for any odd
 $d\geq 3$
using rational functions and logarithms. However, because of the difficulty in getting generic expressions out of the long division step we proceed by a different approach. For
$d\geq 3$
using rational functions and logarithms. However, because of the difficulty in getting generic expressions out of the long division step we proceed by a different approach. For
 $d=2,3,4,5$
,
$d=2,3,4,5$
,
 $Q^{\mathbb{B}}_d(\varrho;\,0)$
has been plotted in Figure 1.
$Q^{\mathbb{B}}_d(\varrho;\,0)$
has been plotted in Figure 1.
Plot of
 $Q^\mathbb{B}_d(\varrho;\,0)$
for
$Q^\mathbb{B}_d(\varrho;\,0)$
for
 $d=2,3,4,5$
using MATLAB
$d=2,3,4,5$
using MATLAB
 $^{\circledR}$
.
$^{\circledR}$
.

Figure 1 Long description
A line graph showing the plot of Q sub B sub d of rho semicolon 0 for d equals 2, 3, 4, 5 using MATLAB. The x-axis represents the variable rho ranging from 0 to 1. The y-axis represents the function Q sub B sub d of rho semicolon 0 ranging from 0 to 1. The graph includes four lines representing different values of d: d equals 2 is a solid line, d equals 3 is a dashed line, d equals 4 is a dash-dot line, and d equals 5 is a dotted line. Each line shows a decreasing trend as rho increases. All values are approximated.
For
 $\varepsilon\in(0,1)$
, by using the substitution
$\varepsilon\in(0,1)$
, by using the substitution
 $y=1-\left(1-\varepsilon\right)({\sin}\, t)^2$
,
$y=1-\left(1-\varepsilon\right)({\sin}\, t)^2$
,
 \begin{align*} J_d\left(1-\varepsilon\right) &= \int^{\frac{\pi}{2}}_0\big(1-\left(1-\varepsilon\right)({\sin}\, t)^2\big)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t \\ &= \left(1-\varepsilon\right)^{2-d}2^{d-3}\int^1_{\varepsilon} y^{-{(d-1)}/{2}}\left(1-y\right)^{{(d-3)}/{2}}\left(y- \varepsilon\right)^{{(d-3)}/{2}}\mathrm{d} y. \end{align*}
\begin{align*} J_d\left(1-\varepsilon\right) &= \int^{\frac{\pi}{2}}_0\big(1-\left(1-\varepsilon\right)({\sin}\, t)^2\big)^{-{(d-1)}/{2}}\left({\sin}\, 2t\right)^{d-2}\mathrm{d} t \\ &= \left(1-\varepsilon\right)^{2-d}2^{d-3}\int^1_{\varepsilon} y^{-{(d-1)}/{2}}\left(1-y\right)^{{(d-3)}/{2}}\left(y- \varepsilon\right)^{{(d-3)}/{2}}\mathrm{d} y. \end{align*}
There exists a sequence
 $\{c_k\}_{k\in\mathbb N}$
such that
$\{c_k\}_{k\in\mathbb N}$
such that
 $(y-\varepsilon)^{{(d-3)}/{2}}= \sum^\infty_{k=0}c_k\varepsilon^k y^{({(d-3)}/{2})-k}$
, and only the integral resulting from the first of these terms will diverge as
$(y-\varepsilon)^{{(d-3)}/{2}}= \sum^\infty_{k=0}c_k\varepsilon^k y^{({(d-3)}/{2})-k}$
, and only the integral resulting from the first of these terms will diverge as
 $\varepsilon\searrow 0$
. Since
$\varepsilon\searrow 0$
. Since
 $c_0=1$
,
$c_0=1$
,
 \begin{equation*} J_d\left(1-\varepsilon\right) = \left(1-\varepsilon\right)^{2-d}2^{d-3}\int^1_{\varepsilon}y^{-1}\left(1 -y\right)^{{(d-3)}/{2}}\mathrm{d} y + \mathcal{O}\left(1\right) \quad\text{as }\varepsilon\searrow 0. \end{equation*}
\begin{equation*} J_d\left(1-\varepsilon\right) = \left(1-\varepsilon\right)^{2-d}2^{d-3}\int^1_{\varepsilon}y^{-1}\left(1 -y\right)^{{(d-3)}/{2}}\mathrm{d} y + \mathcal{O}\left(1\right) \quad\text{as }\varepsilon\searrow 0. \end{equation*}
Therefore, there exists a constant
 $C_d\in(0,\infty)$
such that
$C_d\in(0,\infty)$
such that
 \begin{equation*} J_d\left(1-\varepsilon\right) \sim -C_d \log \varepsilon \quad\text{as } \varepsilon\searrow 0. \end{equation*}
\begin{equation*} J_d\left(1-\varepsilon\right) \sim -C_d \log \varepsilon \quad\text{as } \varepsilon\searrow 0. \end{equation*}
Therefore, there exists a constant
 $C'_d\in(0,\infty)$
such that
$C'_d\in(0,\infty)$
such that
 \begin{equation*} Q^{\mathbb{B}}_d(\varrho;\,0) \sim -C'_d\left(1-\varrho\right)^{{(d-1)}/{2}}\log\left(1-\varrho\right) \quad\text{as }\varrho\nearrow 1. \end{equation*}
\begin{equation*} Q^{\mathbb{B}}_d(\varrho;\,0) \sim -C'_d\left(1-\varrho\right)^{{(d-1)}/{2}}\log\left(1-\varrho\right) \quad\text{as }\varrho\nearrow 1. \end{equation*}
From the expression (5.1), it is clear that
 $Q^{\mathbb{B}}_d(\varrho;\,0)$
is continuous for
$Q^{\mathbb{B}}_d(\varrho;\,0)$
is continuous for
 $\varrho\in\left[0,1\right)$
, and (5.2) then implies that the upper bound result holds.
$\varrho\in\left[0,1\right)$
, and (5.2) then implies that the upper bound result holds.
The bounds for
 $Q_d$
then follow from using (2.1) to obtain
$Q_d$
then follow from using (2.1) to obtain
 $1-\varrho \sim 2 \exp\left(-r\right)$
.
$1-\varrho \sim 2 \exp\left(-r\right)$
.
We now use the spherical transform to ‘partially diagonalize’
 $L^2({\mathbb{H}^d}\times\mathcal E\times\mathcal E)\to L^2({\mathbb{H}^d}\times\mathcal E\times\mathcal E)$
linear operators that are invariant under rotations about o in
$L^2({\mathbb{H}^d}\times\mathcal E\times\mathcal E)\to L^2({\mathbb{H}^d}\times\mathcal E\times\mathcal E)$
linear operators that are invariant under rotations about o in
 ${\mathbb{H}^d}$
. The following lemma gives the three properties that we require from the spherical transform for our argument.
${\mathbb{H}^d}$
. The following lemma gives the three properties that we require from the spherical transform for our argument.
Lemma 5.2. There exists a d-dependent real constant
 $w>0$
and a d-dependent function
$w>0$
and a d-dependent function
 $\mathbf{c}\colon \mathbb R\to\mathbb C$
such that, for
$\mathbf{c}\colon \mathbb R\to\mathbb C$
such that, for
 $f\in \mathfrak{D}(\mathbb{B})$
, and
$f\in \mathfrak{D}(\mathbb{B})$
, and
 $z\in\mathbb{B}$
,
$z\in\mathbb{B}$
,
 \begin{equation*} f(z) = \frac{1}{w} \int_{\mathbb{R}}\int_{{\mathbb{S}^{d-1}}}\mathrm{e}^{\left(is+{(d-1)}/{2}\right)A(z,b)} \widetilde{f}(s,b)\lvert \mathbf{c}(s) \rvert^{-2}\mathrm{d} b\mathrm{d} s. \end{equation*}
\begin{equation*} f(z) = \frac{1}{w} \int_{\mathbb{R}}\int_{{\mathbb{S}^{d-1}}}\mathrm{e}^{\left(is+{(d-1)}/{2}\right)A(z,b)} \widetilde{f}(s,b)\lvert \mathbf{c}(s) \rvert^{-2}\mathrm{d} b\mathrm{d} s. \end{equation*}
For
 $f_1\in \mathfrak{D}_\natural(\mathbb{B})$
and
$f_1\in \mathfrak{D}_\natural(\mathbb{B})$
and
 $f_2\in \mathfrak{D}(\mathbb{B})$
,
$f_2\in \mathfrak{D}(\mathbb{B})$
,
 \begin{equation} \left(f_1\star f_2\right)^{\sim}(s,b) = \widetilde{f_1}(s)\widetilde{f_2}(s,b). \end{equation}
\begin{equation} \left(f_1\star f_2\right)^{\sim}(s,b) = \widetilde{f_1}(s)\widetilde{f_2}(s,b). \end{equation}
For
 $f_1,f_2\in \mathfrak{D}(\mathbb{B})$
, the following Plancherel result holds:
$f_1,f_2\in \mathfrak{D}(\mathbb{B})$
, the following Plancherel result holds:
 \begin{equation*} \int_{\mathbb{B}}f_1(z)f_2(z) \mathbf{d}z = \frac{1}{w}\int_{\mathbb{R}}\int_{{\mathbb{S}^{d-1}}}\widetilde{f_1}(s,b)\overline{\widetilde{f_2}(s,b)}\lvert \mathbf{c}(s) \rvert^{-2}\mathrm{d} b\mathrm{d} s. \end{equation*}
\begin{equation*} \int_{\mathbb{B}}f_1(z)f_2(z) \mathbf{d}z = \frac{1}{w}\int_{\mathbb{R}}\int_{{\mathbb{S}^{d-1}}}\widetilde{f_1}(s,b)\overline{\widetilde{f_2}(s,b)}\lvert \mathbf{c}(s) \rvert^{-2}\mathrm{d} b\mathrm{d} s. \end{equation*}
The constant w is the order of the Weyl group and the function
 $\mathbf{c}(s)$
is known as the Harish-Chandra
$\mathbf{c}(s)$
is known as the Harish-Chandra
 $\mathbf{c}$
function. We will not require expressions for these in our argument, but their definitions can be found in [Reference Helgason20, Chapter 1, p.75 & p.108].
$\mathbf{c}$
function. We will not require expressions for these in our argument, but their definitions can be found in [Reference Helgason20, Chapter 1, p.75 & p.108].
Proof of Lemma
5.2. For
 $d=2$
, this is proven in [Reference Helgason21, Intro.: Thm 4.2, Thm 4.6], and the
$d=2$
, this is proven in [Reference Helgason21, Intro.: Thm 4.2, Thm 4.6], and the
 $d\geq 3$
cases follow from the general symmetric space case dealt with in [Reference Helgason20, Ch. III: Thm 1.3, Lem. 1.4, Thm 1.5]. Note that while [Reference Helgason20, Reference Helgason21] express these properties for functions
$d\geq 3$
cases follow from the general symmetric space case dealt with in [Reference Helgason20, Ch. III: Thm 1.3, Lem. 1.4, Thm 1.5]. Note that while [Reference Helgason20, Reference Helgason21] express these properties for functions
 $f_1,f_2$
in the space of continuous functions with compact (with respect to the
$f_1,f_2$
in the space of continuous functions with compact (with respect to the
 ${\mathbb{H}^d}$
metric) support, these can be extended to
${\mathbb{H}^d}$
metric) support, these can be extended to
 $\mathfrak{D}(\mathbb{B})$
in the usual manner. Also be warned that these references define convolution in the reverse order to the convention we take here (convolution on
$\mathfrak{D}(\mathbb{B})$
in the usual manner. Also be warned that these references define convolution in the reverse order to the convention we take here (convolution on
 ${\mathbb{H}^d}$
is in general not commutative).
${\mathbb{H}^d}$
is in general not commutative).
In what follows, let
 $\psi\colon({\mathbb{H}^d}\times\mathcal E)\times ({\mathbb{H}^d}\times\mathcal E)\to [0,1]$
be measurable and define the associated operator
$\psi\colon({\mathbb{H}^d}\times\mathcal E)\times ({\mathbb{H}^d}\times\mathcal E)\to [0,1]$
be measurable and define the associated operator
 $\Psi\colon \mathcal{D}(\psi)\to \mathbb R^{{\mathbb{H}^d}\times \mathcal E}$
in the sense of (3.1). Also suppose that
$\Psi\colon \mathcal{D}(\psi)\to \mathbb R^{{\mathbb{H}^d}\times \mathcal E}$
in the sense of (3.1). Also suppose that
 $\psi$
is isometry invariant in the
$\psi$
is isometry invariant in the
 ${\mathbb{H}^d}$
arguments, so that
${\mathbb{H}^d}$
arguments, so that
 $\psi(x,a,y,b)=\psi(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b)$
for
$\psi(x,a,y,b)=\psi(\mathrm{dist}_{{\mathbb{H}^d}}(x,y);\,a,b)$
for
 $x,y\in{\mathbb{H}^d}$
and
$x,y\in{\mathbb{H}^d}$
and
 $a,b\in\mathcal E$
. Observe then that the spherical transform is defined for
$a,b\in\mathcal E$
. Observe then that the spherical transform is defined for
 $r\mapsto \psi(r;\,a,b)$
if and only if
$r\mapsto \psi(r;\,a,b)$
if and only if
 \begin{equation} \int^\infty_0\psi(r;\,a,b)Q_d(r)\mathrm{e}^{(d-1)r}\mathrm{d} r<\infty,\end{equation}
\begin{equation} \int^\infty_0\psi(r;\,a,b)Q_d(r)\mathrm{e}^{(d-1)r}\mathrm{d} r<\infty,\end{equation}
where we have taken the integrability condition in (5.4) and expressed an equivalent condition in hyperbolic distance coordinates (and using
 $\psi\in[0,1]$
). If (5.6) holds for
$\psi\in[0,1]$
). If (5.6) holds for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
, then we can define an operator-valued function
$a,b\in\mathcal E$
, then we can define an operator-valued function
 $s\mapsto\widetilde{\Psi}(s)$
. For each
$s\mapsto\widetilde{\Psi}(s)$
. For each
 $s\in\mathbb R$
, we can define an operator
$s\in\mathbb R$
, we can define an operator
 $\widetilde{\Psi}(s)\colon \mathcal{D}(\widetilde{\psi}(s;\,\cdot,\cdot))\to \mathbb R^{{\mathbb{H}^d}\times\mathcal E}$
using the spherical transform-ed functions
$\widetilde{\Psi}(s)\colon \mathcal{D}(\widetilde{\psi}(s;\,\cdot,\cdot))\to \mathbb R^{{\mathbb{H}^d}\times\mathcal E}$
using the spherical transform-ed functions
 $(a,b)\mapsto\widetilde{\psi}(s;\,a,b)$
.
$(a,b)\mapsto\widetilde{\psi}(s;\,a,b)$
.
Lemma 5.3. If (5.6) holds for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
and
$a,b\in\mathcal E$
and
 $\lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}<\infty$
,
$\lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}<\infty$
,
 \begin{equation*} \lVert {\Psi}\rVert_{2\to 2} = {\mathrm{ess sup}}_{s\in\mathbb R}\lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2} = \lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}. \end{equation*}
\begin{equation*} \lVert {\Psi}\rVert_{2\to 2} = {\mathrm{ess sup}}_{s\in\mathbb R}\lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2} = \lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}. \end{equation*}
Proof. The bound (5.6) holding for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
indicates that the spherical transform is defined for these
$a,b\in\mathcal E$
indicates that the spherical transform is defined for these
 $a,b\in\mathcal E$
, and we can use Lemma 5.2 for those values. The first equality holds by the same argument as in [Reference Dickson and Heydenreich11, Lemma 3.6]. Approximately speaking, for each
$a,b\in\mathcal E$
, and we can use Lemma 5.2 for those values. The first equality holds by the same argument as in [Reference Dickson and Heydenreich11, Lemma 3.6]. Approximately speaking, for each
 $s\in\mathbb R$
, find a unit
$s\in\mathbb R$
, find a unit
 $g^{(s)}\in L^2(\mathcal E)$
such that
$g^{(s)}\in L^2(\mathcal E)$
such that
 $\lVert {\widetilde{\Psi}(s) g^{(s)}}\rVert_2$
approximates the operator norm of
$\lVert {\widetilde{\Psi}(s) g^{(s)}}\rVert_2$
approximates the operator norm of
 $\widetilde{\Psi}(s)$
. Then by suitably choosing some
$\widetilde{\Psi}(s)$
. Then by suitably choosing some
 $\widetilde{f}\colon \mathbb R\to \mathbb C$
one can use the Plancherel and inverse transform parts of Lemma 5.2 to construct a unit
$\widetilde{f}\colon \mathbb R\to \mathbb C$
one can use the Plancherel and inverse transform parts of Lemma 5.2 to construct a unit
 $h\in L^2({\mathbb{H}^d}\times \mathcal E)$
such that
$h\in L^2({\mathbb{H}^d}\times \mathcal E)$
such that
 $\lVert {\Psi h}\rVert_2$
approximates some part of the essential spectrum of
$\lVert {\Psi h}\rVert_2$
approximates some part of the essential spectrum of
 $\Psi$
. This shows that
$\Psi$
. This shows that
 $\lVert {\Psi}\rVert_{2\to 2} \geq \textrm{ess sup}_{s\in\mathbb R}\lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2}$
. To show the reverse inequality, first take some unit
$\lVert {\Psi}\rVert_{2\to 2} \geq \textrm{ess sup}_{s\in\mathbb R}\lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2}$
. To show the reverse inequality, first take some unit
 $h\in L^2({\mathbb{H}^d}\times\mathcal E)$
that approximates the operator norm of
$h\in L^2({\mathbb{H}^d}\times\mathcal E)$
that approximates the operator norm of
 $\Psi$
, and then for all
$\Psi$
, and then for all
 $s\in\mathbb R$
, define
$s\in\mathbb R$
, define
 $g^{(s)}$
by fixing
$g^{(s)}$
by fixing
 $a\in\mathcal E$
and taking the spherical transform of h(x,a) (i.e.
$a\in\mathcal E$
and taking the spherical transform of h(x,a) (i.e.
 $g^{(s)}(a) = \widetilde{h}(s,a)$
). The convolution operator on
$g^{(s)}(a) = \widetilde{h}(s,a)$
). The convolution operator on
 $L^2(\mathcal E)$
that uses
$L^2(\mathcal E)$
that uses
 $g^{(s)}$
can be ‘diagonalized’ into a multiplication operator on some other space by a unitary transformation. This unitarity and the Plancherel and multiplication parts of Lemma 5.2 then mean that
$g^{(s)}$
can be ‘diagonalized’ into a multiplication operator on some other space by a unitary transformation. This unitarity and the Plancherel and multiplication parts of Lemma 5.2 then mean that
 $g^{(s)}$
is a unit vector in
$g^{(s)}$
is a unit vector in
 $L^2(\mathcal E)$
such that
$L^2(\mathcal E)$
such that
 $\lVert {\widetilde{\Psi}(s)g^{(s)}}\rVert_2$
approximates some part of the essential spectrum of
$\lVert {\widetilde{\Psi}(s)g^{(s)}}\rVert_2$
approximates some part of the essential spectrum of
 $\widetilde{\Psi}(s)$
.
$\widetilde{\Psi}(s)$
.
For the inequality
 $\textrm{ess sup}_{s\in\mathbb R}\lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2} \leq \lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}$
, note that
$\textrm{ess sup}_{s\in\mathbb R}\lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2} \leq \lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}$
, note that
 \begin{align*} &\lvert {\widetilde{\psi}(s;\,a,b)}\rvert\nonumber \\ &\quad=\lvert {\mathfrak{S}_{d-2}\int^1_0 \! \psi(\varrho;\,a,b)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \bigg(\int^{\pi}_0\!\bigg(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos \theta}\bigg)^{{(d-1)}/{2}-is}({\sin}\, \theta)^{d-2}\mathrm{d} \theta\bigg)\mathrm{d} \varrho}\rvert \nonumber \\ &\quad\leq \mathfrak{S}_{d-2}\int^1_0 \! \psi(\varrho;\,a,b)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \bigg(\int^{\pi}_0\lvert {\bigg(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos\theta} \bigg)^{{(d-1)}/{2}-is}({\sin}\, \theta)^{d-2}}\rvert\mathrm{d} \theta\bigg)\mathrm{d} \varrho\nonumber \\ &\quad= \mathfrak{S}_{d-2}\int^1_0 \psi(\varrho;\,a,b)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \bigg(\int^{\pi}_0\bigg(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos \theta}\bigg)^{{(d-1)}/{2}}({\sin}\, \theta)^{d-2}\mathrm{d} \theta\bigg)\mathrm{d} \varrho\nonumber \\ &\quad= \widetilde{\psi}(0;\,a,b) \end{align*}
\begin{align*} &\lvert {\widetilde{\psi}(s;\,a,b)}\rvert\nonumber \\ &\quad=\lvert {\mathfrak{S}_{d-2}\int^1_0 \! \psi(\varrho;\,a,b)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \bigg(\int^{\pi}_0\!\bigg(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos \theta}\bigg)^{{(d-1)}/{2}-is}({\sin}\, \theta)^{d-2}\mathrm{d} \theta\bigg)\mathrm{d} \varrho}\rvert \nonumber \\ &\quad\leq \mathfrak{S}_{d-2}\int^1_0 \! \psi(\varrho;\,a,b)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \bigg(\int^{\pi}_0\lvert {\bigg(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos\theta} \bigg)^{{(d-1)}/{2}-is}({\sin}\, \theta)^{d-2}}\rvert\mathrm{d} \theta\bigg)\mathrm{d} \varrho\nonumber \\ &\quad= \mathfrak{S}_{d-2}\int^1_0 \psi(\varrho;\,a,b)\frac{4\varrho^{d-1}}{(1-\varrho^2)^2} \bigg(\int^{\pi}_0\bigg(\frac{1-\varrho^2}{1+\varrho^2-2\varrho\cos \theta}\bigg)^{{(d-1)}/{2}}({\sin}\, \theta)^{d-2}\mathrm{d} \theta\bigg)\mathrm{d} \varrho\nonumber \\ &\quad= \widetilde{\psi}(0;\,a,b) \end{align*}
uniformly in
 $a,b\in\mathcal E$
and
$a,b\in\mathcal E$
and
 $s\in\mathbb R$
. The inequality then holds because of the monotonicity of the operator norm.
$s\in\mathbb R$
. The inequality then holds because of the monotonicity of the operator norm.
The last equality then uses
 $\lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}<\infty$
and a dominated convergence argument to show that
$\lVert {\widetilde{\Psi}(0)}\rVert_{2\to 2}<\infty$
and a dominated convergence argument to show that
 $s\to \lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2}$
is continuous at
$s\to \lVert {\widetilde{\Psi}(s)}\rVert_{2\to 2}$
is continuous at
 $s=0$
.
$s=0$
.
Recall the definition of
 $D_L(a,b)$
from (2.10). We can use this function to define a linear operator on
$D_L(a,b)$
from (2.10). We can use this function to define a linear operator on
 $\mathcal{D}\left(D_L\right)\subset \mathbb R^\mathcal E$
as in (3.1), and let
$\mathcal{D}\left(D_L\right)\subset \mathbb R^\mathcal E$
as in (3.1), and let
 $\lVert {D_L}\rVert_{p\to q}$
denote the
$\lVert {D_L}\rVert_{p\to q}$
denote the
 $L^p(\mathcal E)\to L^q(\mathcal E)$
operator norm of this operator.
$L^p(\mathcal E)\to L^q(\mathcal E)$
operator norm of this operator.
Lemma 5.4. Suppose that Assumption 1 or Assumption 2 holds. Then
 \begin{equation*} \lim_{L\to\infty}\frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{\lVert {D_L}\rVert_{2\to 2}} = 0. \end{equation*}
\begin{equation*} \lim_{L\to\infty}\frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{\lVert {D_L}\rVert_{2\to 2}} = 0. \end{equation*}
Proof. Let
 $R\in(0,1)$
. Then Lemma 5.1 indicates that there exists a constant
$R\in(0,1)$
. Then Lemma 5.1 indicates that there exists a constant
 $C=C(d)<\infty$
such that
$C=C(d)<\infty$
such that
 $Q^{\mathbb{B}}_d(\varrho;\,0)\leq C$
and, thus,
$Q^{\mathbb{B}}_d(\varrho;\,0)\leq C$
and, thus,
 \begin{align*} &\int^1_0 \varphi_L(\varrho;\,a,b)Q^{\mathbb{B}}_d(\varrho;\,0)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho \nonumber \\ & \qquad \leq C\int^R_0 \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho + \int^1_R \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho \textrm{ ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0)\nonumber\\ & \qquad \leq C\int^R_0 \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho + D_L(a,b) \textrm{ ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0). \end{align*}
\begin{align*} &\int^1_0 \varphi_L(\varrho;\,a,b)Q^{\mathbb{B}}_d(\varrho;\,0)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho \nonumber \\ & \qquad \leq C\int^R_0 \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho + \int^1_R \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho \textrm{ ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0)\nonumber\\ & \qquad \leq C\int^R_0 \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho + D_L(a,b) \textrm{ ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0). \end{align*}
Now define
 \begin{equation*} D^{(\leq R)}_L(a,b)\,:\!=\, \mathfrak{S}_{d-1}\int^R_0 \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho \end{equation*}
\begin{equation*} D^{(\leq R)}_L(a,b)\,:\!=\, \mathfrak{S}_{d-1}\int^R_0 \varphi_L(\varrho;\,a,b)\frac{4\varrho^{d-1}}{\left(1-\varrho^2\right)^2}\mathrm{d} \varrho \end{equation*}
and the associated linear operator
 $\mathcal{D}(D^{(\leq R)}_L)\to \mathbb R^\mathcal E$
. Assumptions 1 and 2 each show that
$\mathcal{D}(D^{(\leq R)}_L)\to \mathbb R^\mathcal E$
. Assumptions 1 and 2 each show that
 $\int^\infty_0\varphi_L(r;\,a,b)Q_d(r)\mathrm{e}^{(d-1)r}\mathrm{d} r<\infty$
for
$\int^\infty_0\varphi_L(r;\,a,b)Q_d(r)\mathrm{e}^{(d-1)r}\mathrm{d} r<\infty$
for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
and
$a,b\in\mathcal E$
and
 $ \lVert {\widetilde{\varPhi}_L(0)}\rVert_{2\to 2}<\infty$
in their regimes, and therefore, we can apply Lemma 5.3, the triangle inequality, and the homogeneity of the norm to obtain
$ \lVert {\widetilde{\varPhi}_L(0)}\rVert_{2\to 2}<\infty$
in their regimes, and therefore, we can apply Lemma 5.3, the triangle inequality, and the homogeneity of the norm to obtain
 \begin{equation*} \lVert {\varPhi_L}\rVert_{2\to 2} = \lVert {\widetilde{\varPhi}_L(0)}\rVert_{2\to 2} \leq C\lVert {D^{(\leq R)}_L}\rVert_{2\to 2} + \lVert {D_L}\rVert_{2\to 2}\textrm{ ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0). \end{equation*}
\begin{equation*} \lVert {\varPhi_L}\rVert_{2\to 2} = \lVert {\widetilde{\varPhi}_L(0)}\rVert_{2\to 2} \leq C\lVert {D^{(\leq R)}_L}\rVert_{2\to 2} + \lVert {D_L}\rVert_{2\to 2}\textrm{ ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0). \end{equation*}
Then under Assumption 1, the equivalence of norms and (2.7) (and translating into Poincarè disc coordinates) implies that there exists a sequence
 $\{C'_L\}_{L}$
such that
$\{C'_L\}_{L}$
such that
 $C'_L\to 0$
and
$C'_L\to 0$
and
 $\lVert {D^{(\leq R)}_L}\rVert_{2\to 2}\leq C'_L \lVert {D_L}\rVert_{2\to 2}$
. Under Assumption 2, the scaling function is volume-linear and, therefore,
$\lVert {D^{(\leq R)}_L}\rVert_{2\to 2}\leq C'_L \lVert {D_L}\rVert_{2\to 2}$
. Under Assumption 2, the scaling function is volume-linear and, therefore,
 \begin{gather*} \lVert {D^{(\leq R)}_L}\rVert_{2\to 2} \leq L \mathfrak{S}_{d-1}\mathbf{V}_d(s^{-1}_L(R)) = \mathfrak{S}_{d-1}\mathbf{V}_d(R), \\ \lVert {D_L}\rVert_{2\to 2} = L\lVert {D}\rVert_{2\to 2}. \end{gather*}
\begin{gather*} \lVert {D^{(\leq R)}_L}\rVert_{2\to 2} \leq L \mathfrak{S}_{d-1}\mathbf{V}_d(s^{-1}_L(R)) = \mathfrak{S}_{d-1}\mathbf{V}_d(R), \\ \lVert {D_L}\rVert_{2\to 2} = L\lVert {D}\rVert_{2\to 2}. \end{gather*}
That is, under Assumption 2 there also exists a sequence
 $\left\{C'_L\right\}_{L}$
such that
$\left\{C'_L\right\}_{L}$
such that
 $C'_L\to 0$
and
$C'_L\to 0$
and
 $\lVert {D^{(\leq R)}_L}\rVert_{2\to 2}\leq C'_L \lVert {D_L}\rVert_{2\to 2}$
. Either way,
$\lVert {D^{(\leq R)}_L}\rVert_{2\to 2}\leq C'_L \lVert {D_L}\rVert_{2\to 2}$
. Either way,
 \begin{equation*} \lVert {\varPhi_L}\rVert_{2\to 2} \leq\lVert {D_L}\rVert_{2\to 2}\big(C'_L+\textrm{ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0)\big). \end{equation*}
\begin{equation*} \lVert {\varPhi_L}\rVert_{2\to 2} \leq\lVert {D_L}\rVert_{2\to 2}\big(C'_L+\textrm{ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0)\big). \end{equation*}
Therefore,
 \begin{equation*} \limsup_{L\to\infty}\frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{\lVert {D_L}\rVert_{2\to 2}} \leq \textrm{ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0). \end{equation*}
\begin{equation*} \limsup_{L\to\infty}\frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{\lVert {D_L}\rVert_{2\to 2}} \leq \textrm{ess sup}_{t>R}Q^{\mathbb{B}}_d(t;\,0). \end{equation*}
From Lemma 5.1, this bound can be made arbitrarily small by taking
 $R\nearrow 1$
and the result follows.
$R\nearrow 1$
and the result follows.
When we are working under Assumption 2, Lemma 5.4 does not give enough information when
 $\lVert {D}\rVert_{2\to 2}=\infty$
, and we will need the following refinement.
$\lVert {D}\rVert_{2\to 2}=\infty$
, and we will need the following refinement.
Lemma 5.5. If Assumption 2 holds then
 $\lVert {\varPhi_L}\rVert_{2\to 2} =o(L)$
as
$\lVert {\varPhi_L}\rVert_{2\to 2} =o(L)$
as
 $L\to\infty$
.
$L\to\infty$
.
Proof. Let
 $a,b\in\mathcal E$
. Then by a change of variables
$a,b\in\mathcal E$
. Then by a change of variables
 \begin{align*} \int^\infty_0\varphi_L(r;\,a,b)Q_d(r)({\sinh}\, r)^{d-1}\mathrm{d} r &= L \int^\infty_0\varphi(r;\,a,b) Q_d\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &\leq L \int^\infty_0 \varphi(r;\,a,b) f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r, \end{align*}
\begin{align*} \int^\infty_0\varphi_L(r;\,a,b)Q_d(r)({\sinh}\, r)^{d-1}\mathrm{d} r &= L \int^\infty_0\varphi(r;\,a,b) Q_d\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &\leq L \int^\infty_0 \varphi(r;\,a,b) f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r, \end{align*}
where
 $f(r)\,:\!=\, \sup_{t\geq r}Q_d(t)$
. Here f is non-increasing and inherits the
$f(r)\,:\!=\, \sup_{t\geq r}Q_d(t)$
. Here f is non-increasing and inherits the
 $r\to\infty$
asymptotics from those derived for
$r\to\infty$
asymptotics from those derived for
 $Q_d$
in the proof of Lemma 5.1. In particular, Assumption 2 implies that
$Q_d$
in the proof of Lemma 5.1. In particular, Assumption 2 implies that
 \begin{equation*} \mathfrak{S}_{d-1}\int^\infty_0 \varphi(r;\,a,b) f(r)({\sinh}\, r)^{d-1}\mathrm{d} r<\infty \end{equation*}
\begin{equation*} \mathfrak{S}_{d-1}\int^\infty_0 \varphi(r;\,a,b) f(r)({\sinh}\, r)^{d-1}\mathrm{d} r<\infty \end{equation*}
for almost every
 $a,b\in\mathcal E$
, and the operator with this kernel (denote this
$a,b\in\mathcal E$
, and the operator with this kernel (denote this
 $\varPhi^{(f)}$
) has finite
$\varPhi^{(f)}$
) has finite
 $L^2(\mathcal E)\to L^2(\mathcal E)$
operator norm.
$L^2(\mathcal E)\to L^2(\mathcal E)$
operator norm.
Now we explore the asymptotics of
 $s_L(r)$
as
$s_L(r)$
as
 $r\to\infty$
for fixed L. Clearly as
$r\to\infty$
for fixed L. Clearly as
 $r\to\infty$
,
$r\to\infty$
,
 \begin{align*} \mathbf{V}_d(r) &\sim \frac{1}{d-1}\frac{1}{2^{d-1}}\mathrm{e}^{(d-1)r},\\ \mathbf{V}_d^{-1}(r) &\sim \log 2 + \frac{1}{d-1}\log(d-1) + \frac{1}{d-1}\log r, \end{align*}
\begin{align*} \mathbf{V}_d(r) &\sim \frac{1}{d-1}\frac{1}{2^{d-1}}\mathrm{e}^{(d-1)r},\\ \mathbf{V}_d^{-1}(r) &\sim \log 2 + \frac{1}{d-1}\log(d-1) + \frac{1}{d-1}\log r, \end{align*}
and therefore,
 \begin{equation*} s_L(r)\sim r+ \frac{1}{d-1}\log L. \end{equation*}
\begin{equation*} s_L(r)\sim r+ \frac{1}{d-1}\log L. \end{equation*}
Therefore, from the proof of Lemma 5.1 we have
 \begin{equation} \frac{f\left(s_L(r)\right)}{f(r)} \sim \frac{s_L(r)}{r}\exp\left(\frac{1}{2}(d-1)\left(r - s_L(r)\right)\right) \sim \frac{1}{\sqrt{L}\,} \end{equation}
\begin{equation} \frac{f\left(s_L(r)\right)}{f(r)} \sim \frac{s_L(r)}{r}\exp\left(\frac{1}{2}(d-1)\left(r - s_L(r)\right)\right) \sim \frac{1}{\sqrt{L}\,} \end{equation}
as
 $r\to \infty$
for fixed L. On the other hand, if we fix
$r\to \infty$
for fixed L. On the other hand, if we fix
 $r>0$
and let
$r>0$
and let
 $L\to \infty$
, we get
$L\to \infty$
, we get
 $s_L(r)\to\infty$
and, therefore,
$s_L(r)\to\infty$
and, therefore,
 \begin{equation*} \lim_{L\to\infty}\frac{f\left(s_L(r)\right)}{f(r)} = 0 \end{equation*}
\begin{equation*} \lim_{L\to\infty}\frac{f\left(s_L(r)\right)}{f(r)} = 0 \end{equation*}
for all
 $r>0$
. Furthermore, since
$r>0$
. Furthermore, since
 $L\mapsto s_L(r)$
is increasing,
$L\mapsto s_L(r)$
is increasing,
 $L\mapsto {f(s_L(r))}/{f(r)}$
is non-increasing. For
$L\mapsto {f(s_L(r))}/{f(r)}$
is non-increasing. For
 $L,\varepsilon>0$
, define
$L,\varepsilon>0$
, define
 \begin{equation*} R_{L,\varepsilon}\,:\!=\, \sup\left\{r>0\colon \frac{f\left(s_L(r)\right)}{f(r)} \geq \varepsilon\right\} \end{equation*}
\begin{equation*} R_{L,\varepsilon}\,:\!=\, \sup\left\{r>0\colon \frac{f\left(s_L(r)\right)}{f(r)} \geq \varepsilon\right\} \end{equation*}
so that the map
 $L\mapsto R_{L,\varepsilon}$
is non-increasing.
$L\mapsto R_{L,\varepsilon}$
is non-increasing.
Now given
 $\varepsilon>0$
, fix
$\varepsilon>0$
, fix
 $R_{\varepsilon}\,:\!=\, R_{4\varepsilon^{-2},\varepsilon}$
((5.7) implies that
$R_{\varepsilon}\,:\!=\, R_{4\varepsilon^{-2},\varepsilon}$
((5.7) implies that
 $R_\varepsilon<\infty$
). Therefore, for all
$R_\varepsilon<\infty$
). Therefore, for all
 $a,b\in\mathcal E$
,
$a,b\in\mathcal E$
,
 \begin{align*} &\int^\infty_0\varphi_L(r;\,a,b)Q_d(r)({\sinh}\, r)^{d-1}\mathrm{d} r\nonumber \\[3pt] &\qquad\leq L\int^{R_\varepsilon}_0 f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r + L\int^\infty_{R_\varepsilon}\frac{f\left(s_L(r)\right)}{f(r)}\varphi(r;\,a,b)f(r)({\sinh}\, r)^{d-1}\mathrm{d} r\nonumber \\[3pt] &\qquad\leq L\int^{R_\varepsilon}_0 f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r + \varepsilon L\int^\infty_{0}\varphi(r;\,a,b)f(r)({\sinh}\, r)^{d-1}\mathrm{d} r. \end{align*}
\begin{align*} &\int^\infty_0\varphi_L(r;\,a,b)Q_d(r)({\sinh}\, r)^{d-1}\mathrm{d} r\nonumber \\[3pt] &\qquad\leq L\int^{R_\varepsilon}_0 f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r + L\int^\infty_{R_\varepsilon}\frac{f\left(s_L(r)\right)}{f(r)}\varphi(r;\,a,b)f(r)({\sinh}\, r)^{d-1}\mathrm{d} r\nonumber \\[3pt] &\qquad\leq L\int^{R_\varepsilon}_0 f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r + \varepsilon L\int^\infty_{0}\varphi(r;\,a,b)f(r)({\sinh}\, r)^{d-1}\mathrm{d} r. \end{align*}
By Lemma 5.3, the triangle inequality, and the homogeneity of the operator norm,
 \begin{equation*} \lVert {\varPhi_L}\rVert_{2\to 2} \leq L\mathfrak{S}_{d-1}\int^{R_\varepsilon}_0 f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r + \varepsilon L \lVert {\varPhi^{(f)}}\rVert_{2\to 2}. \end{equation*}
\begin{equation*} \lVert {\varPhi_L}\rVert_{2\to 2} \leq L\mathfrak{S}_{d-1}\int^{R_\varepsilon}_0 f\left(s_L(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r + \varepsilon L \lVert {\varPhi^{(f)}}\rVert_{2\to 2}. \end{equation*}
Therefore,
 \begin{equation*} \limsup_{L\to\infty} \frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{L} \leq \varepsilon\lVert {\varPhi^{(f)}}\rVert_{2\to 2}. \end{equation*}
\begin{equation*} \limsup_{L\to\infty} \frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{L} \leq \varepsilon\lVert {\varPhi^{(f)}}\rVert_{2\to 2}. \end{equation*}
Since this norm on the right-hand side is finite, taking
 $\varepsilon\searrow 0$
gives the result.
$\varepsilon\searrow 0$
gives the result.
6. Proof of the main results
In the first subsection, the non-uniqueness result Theorem 2.1 is proven. Then Theorem 2.2 is proven in Section 6.2.
6.1. Proof of non-uniqueness
First we relate the uniqueness critical threshold to the
 $L^p\to L^p$
critical thresholds. The only special feature of
$L^p\to L^p$
critical thresholds. The only special feature of
 ${\mathbb{H}^d}$
that the following lemma uses is the existence of an infinite transitive family of transformations, such as the translations. To reflect this generality, we generalise the definition of
${\mathbb{H}^d}$
that the following lemma uses is the existence of an infinite transitive family of transformations, such as the translations. To reflect this generality, we generalise the definition of
 $\theta_\lambda$
like we did for
$\theta_\lambda$
like we did for
 $\chi_\lambda$
in (4.4): for
$\chi_\lambda$
in (4.4): for
 $\mathbf{x}\in{\mathbb{H}^d}\times \mathcal E$
,
$\mathbf{x}\in{\mathbb{H}^d}\times \mathcal E$
,
 \begin{equation*} \theta_\lambda(\mathbf{x}) = \mathbb{P}_{\lambda}\left(\#\mathscr {C}\left(\mathbf{x},\xi^{\mathbf{x}}\right) = \infty\right).\end{equation*}
\begin{equation*} \theta_\lambda(\mathbf{x}) = \mathbb{P}_{\lambda}\left(\#\mathscr {C}\left(\mathbf{x},\xi^{\mathbf{x}}\right) = \infty\right).\end{equation*}
Lemma 6.1. For all
 $p\in[1,\infty]$
and
$p\in[1,\infty]$
and
 $L>0$
,
$L>0$
,
 \begin{equation*} \lambda_{\mathrm{u}}(L) \geq \lambda_{p\to p}(L). \end{equation*}
\begin{equation*} \lambda_{\mathrm{u}}(L) \geq \lambda_{p\to p}(L). \end{equation*}
Proof. If there exists a unique infinite cluster in
 $\xi$
, denote its vertex set by
$\xi$
, denote its vertex set by
 $\mathcal{I}\subset\eta$
. Choose
$\mathcal{I}\subset\eta$
. Choose
 $\lambda>\lambda_{\mathrm{u}}$
such that
$\lambda>\lambda_{\mathrm{u}}$
such that
 $\mathbb P_\lambda\left(\exists! \text{ infinite cluster}\right)>0$
. Then ergodicity implies that there is almost surely an infinite cluster and, therefore,
$\mathbb P_\lambda\left(\exists! \text{ infinite cluster}\right)>0$
. Then ergodicity implies that there is almost surely an infinite cluster and, therefore,
 \begin{equation*} \tau_\lambda(\mathbf{x},\mathbf{y})\geq \mathbb P_\lambda\left(\mathbf{x}\in\mathcal{I} \text{ in }\xi^{\mathbf{x}}, \mathbf{y}\in\mathcal{I} \text{ in }\xi^{\mathbf{y}}\right) \geq \theta_\lambda(\mathbf{x})\theta_\lambda(\mathbf{y}), \end{equation*}
\begin{equation*} \tau_\lambda(\mathbf{x},\mathbf{y})\geq \mathbb P_\lambda\left(\mathbf{x}\in\mathcal{I} \text{ in }\xi^{\mathbf{x}}, \mathbf{y}\in\mathcal{I} \text{ in }\xi^{\mathbf{y}}\right) \geq \theta_\lambda(\mathbf{x})\theta_\lambda(\mathbf{y}), \end{equation*}
where we have used the Fortuin–Kasteleyn–Ginibre (FKG) inequality (Lemma 6.2 below). Since
 $\lambda>\lambda_{\mathrm{u}}\geq \lambda_{\mathrm{c}}$
, there exist
$\lambda>\lambda_{\mathrm{u}}\geq \lambda_{\mathrm{c}}$
, there exist
 $\varepsilon>0$
and
$\varepsilon>0$
and
 $E\subset \mathbb X$
such that
$E\subset \mathbb X$
such that
 $\theta_\lambda(\mathbf{x})\geq\varepsilon$
for all
$\theta_\lambda(\mathbf{x})\geq\varepsilon$
for all
 $\mathbf{x}\in E$
, and
$\mathbf{x}\in E$
, and
 $\nu(E)>0$
. From the hyperbolic translation invariance,
$\nu(E)>0$
. From the hyperbolic translation invariance,
 $\theta_\lambda(\mathbf{x})\geq \varepsilon$
on an infinite measure set and, therefore,
$\theta_\lambda(\mathbf{x})\geq \varepsilon$
on an infinite measure set and, therefore,
 $\lVert \theta_\lambda \rVert_p=\infty$
. Given
$\lVert \theta_\lambda \rVert_p=\infty$
. Given
 $f\in L^p(\mathbb X)$
such that
$f\in L^p(\mathbb X)$
such that
 $f\geq 0$
, we then have
$f\geq 0$
, we then have
 \begin{equation*} \int_{\mathbb{X}} \tau_\lambda(\mathbf{x},\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}) \geq \theta_\lambda(\mathbf{x})\int_{\mathbb{X}}\theta_\lambda(\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}) \end{equation*}
\begin{equation*} \int_{\mathbb{X}} \tau_\lambda(\mathbf{x},\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}) \geq \theta_\lambda(\mathbf{x})\int_{\mathbb{X}}\theta_\lambda(\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}) \end{equation*}
and
 \begin{equation*} \lVert \mathcal{T}_\lambda f \rVert_{p} \geq \lVert \theta_\lambda \rVert_p\int_{\mathbb{X}}\theta_\lambda(\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}). \end{equation*}
\begin{equation*} \lVert \mathcal{T}_\lambda f \rVert_{p} \geq \lVert \theta_\lambda \rVert_p\int_{\mathbb{X}}\theta_\lambda(\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}). \end{equation*}
Now let
 $f=\unicode{x1D7D9}_E$
. Then
$f=\unicode{x1D7D9}_E$
. Then
 $\lVert {f}\rVert_p=\nu(E)^{{1}/{p}}$
and
$\lVert {f}\rVert_p=\nu(E)^{{1}/{p}}$
and
 \begin{equation*} \int_{\mathbb{X}}\theta_\lambda(\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}) \geq \varepsilon\nu(E). \end{equation*}
\begin{equation*} \int_{\mathbb{X}}\theta_\lambda(\mathbf{y})f(\mathbf{y})\nu(\mathrm{d} \mathbf{y}) \geq \varepsilon\nu(E). \end{equation*}
Therefore,
 \begin{equation*} \lVert {\mathcal{T}_\lambda}\rVert_{p\to p} \geq \frac{\lVert {\mathcal{T}_\lambda f}\rVert_{p}}{\lVert {f}\rVert_p}\geq \lVert {\theta_\lambda}\rVert_{p}\varepsilon \nu(E)^{1-{1}/{p}} = \infty. \end{equation*}
\begin{equation*} \lVert {\mathcal{T}_\lambda}\rVert_{p\to p} \geq \frac{\lVert {\mathcal{T}_\lambda f}\rVert_{p}}{\lVert {f}\rVert_p}\geq \lVert {\theta_\lambda}\rVert_{p}\varepsilon \nu(E)^{1-{1}/{p}} = \infty. \end{equation*}
Therefore,
 $\lambda_{p\to p}\geq \lambda \geq \lambda_{\mathrm{u}}$
.
$\lambda_{p\to p}\geq \lambda \geq \lambda_{\mathrm{u}}$
.
Remark 6.1. The following observation was made in an analogous case by Hutchcroft [Reference Hutchcroft26], and applies equally well here. The symmetry of
 $\varphi$
implies that
$\varphi$
implies that
 $\lVert \varPhi \rVert_{p\to p} = \lVert \varPhi \rVert_{{p}/{(p-1)}\to{p}/{(p-1)}}$
, and the Riesz–Thorin theorem implies that
$\lVert \varPhi \rVert_{p\to p} = \lVert \varPhi \rVert_{{p}/{(p-1)}\to{p}/{(p-1)}}$
, and the Riesz–Thorin theorem implies that
 $p\mapsto \log \lVert \varPhi \rVert_{{1}/{p}\to{1}/{p}}$
is a convex function on
$p\mapsto \log \lVert \varPhi \rVert_{{1}/{p}\to{1}/{p}}$
is a convex function on
 $p\in[0,1]$
. Hence,
$p\in[0,1]$
. Hence,
 $p\mapsto\lVert \varPhi \rVert_{p\to p}$
is decreasing on
$p\mapsto\lVert \varPhi \rVert_{p\to p}$
is decreasing on
 $[1,2]$
and increasing on
$[1,2]$
and increasing on
 $[2,\infty]$
. Hence, the choice
$[2,\infty]$
. Hence, the choice
 $p=2$
gives the optimal version of the bound in Lemma 6.1.
$p=2$
gives the optimal version of the bound in Lemma 6.1.
Lemma 6.2. (FKG inequality.) Given two increasing events E,F,
 \begin{equation*} \mathbb P_\lambda\left(\xi\in E\cap F\right) \geq \mathbb P_\lambda\left(\xi\in E\right)\mathbb P_\lambda\left(\xi\in F\right). \end{equation*}
\begin{equation*} \mathbb P_\lambda\left(\xi\in E\cap F\right) \geq \mathbb P_\lambda\left(\xi\in E\right)\mathbb P_\lambda\left(\xi\in F\right). \end{equation*}
Proof. This is proven in [Reference Heydenreich, van der Hofstad, Last and Matzke22, Section 2.3], building upon the FKG inequality for point processes (for example, from [Reference Last and Penrose30, Theorem 20.4]).
For the next two (similar) lemmas, we make use of two subsets of
 ${\mathbb{H}^d}$
that we now construct.
${\mathbb{H}^d}$
that we now construct.
Select an arbitrary direction, which we refer to by the geodesic ray
 $\gamma_0$
emanating from o. Then, given
$\gamma_0$
emanating from o. Then, given
 $\theta\in[0,\pi]$
, define
$\theta\in[0,\pi]$
, define
 \begin{equation*} \mathcal{L}_*(\theta) \,:\!=\, \textrm{arcosh}\left(\frac{1-\cos\theta\cos{\theta}/{2}}{\sin\theta\sin {\theta}/{2}}\right). \end{equation*}
\begin{equation*} \mathcal{L}_*(\theta) \,:\!=\, \textrm{arcosh}\left(\frac{1-\cos\theta\cos{\theta}/{2}}{\sin\theta\sin {\theta}/{2}}\right). \end{equation*}
The geometric construction of this length can be seen in Figure 2. The hyperbolic quadrilateral has internal angles
 $\theta$
,
$\theta$
,
 $\pi-\theta$
,
$\pi-\theta$
,
 $\pi-\theta$
, and 0 (the ideal point on the boundary of the hyperbolic plane). By splitting this into two triangles along the geodesic between the
$\pi-\theta$
, and 0 (the ideal point on the boundary of the hyperbolic plane). By splitting this into two triangles along the geodesic between the
 $\theta$
angle and the 0 angle, the formula for
$\theta$
angle and the 0 angle, the formula for
 $\mathcal{L}_*(\theta)$
follows by applying the cosine rule for hyperbolic triangles.
$\mathcal{L}_*(\theta)$
follows by applying the cosine rule for hyperbolic triangles.
Construction of the length
 $\mathcal{L}_*(\theta)$
in the Poincaré disc model.
$\mathcal{L}_*(\theta)$
in the Poincaré disc model.

Figure 2 Long description
The diagram illustrates the construction of the length L_* in the Poincaré disc model. It features a geometric figure with a curved line and several points marked with angles. The length L_* is indicated along the base of the figure, and the angles are labeled with the symbol theta. The diagram includes lines connecting the points, forming a triangle and a curved path, which are essential for understanding the geometric relationships in the Poincaré disc model.
Given
 $x\in{\mathbb{H}^d}$
, let
$x\in{\mathbb{H}^d}$
, let
 $t_x$
denote the unique translation isometry that maps
$t_x$
denote the unique translation isometry that maps
 $o\mapsto x$
. Let
$o\mapsto x$
. Let
 $x_0,x_1\in{\mathbb{H}^d}$
be distinct points satisfying
$x_0,x_1\in{\mathbb{H}^d}$
be distinct points satisfying
 $\mathrm{dist}_{{\mathbb{H}^d}}(x_0,o),\mathrm{dist}_{{\mathbb{H}^d}}\left(x_1,o\right)>\mathcal{L}_*(\theta)$
, where
$\mathrm{dist}_{{\mathbb{H}^d}}(x_0,o),\mathrm{dist}_{{\mathbb{H}^d}}\left(x_1,o\right)>\mathcal{L}_*(\theta)$
, where
 $\theta$
is the angle subtended at o by
$\theta$
is the angle subtended at o by
 $x_0$
and
$x_0$
and
 $x_1$
. Also let
$x_1$
. Also let
 $\left(k_1,k_2,\ldots\right)\in \left\{0,1\right\}^\mathbb N$
and
$\left(k_1,k_2,\ldots\right)\in \left\{0,1\right\}^\mathbb N$
and
 $\left(l_1,l_2,\ldots\right)\in \left\{0,1\right\}^\mathbb N$
be two distinct sequences. Then it was proven in [Reference Dickson and Heydenreich12] that there exists
$\left(l_1,l_2,\ldots\right)\in \left\{0,1\right\}^\mathbb N$
be two distinct sequences. Then it was proven in [Reference Dickson and Heydenreich12] that there exists
 $\varepsilon>0$
such that
$\varepsilon>0$
such that
 \begin{equation*} \mathrm{dist}_{{\mathbb{H}^d}}(t_{x_{k_n}}t_{x_{k_{n-1}}}\ldots t_{x_{k_1}}x_0,t_{x_{l_n}}t_{x_{l_{n-1}}}\ldots t_{x_{l_1}}x_1)>\varepsilon \end{equation*}
\begin{equation*} \mathrm{dist}_{{\mathbb{H}^d}}(t_{x_{k_n}}t_{x_{k_{n-1}}}\ldots t_{x_{k_1}}x_0,t_{x_{l_n}}t_{x_{l_{n-1}}}\ldots t_{x_{l_1}}x_1)>\varepsilon \end{equation*}
for all
 $n\geq 1$
such that
$n\geq 1$
such that
 $\left(k_1,k_2,\ldots,k_n\right)\ne \left(l_1,l_2,\ldots,l_n\right)$
. Imprecisely, this means that in the binary tree generated by
$\left(k_1,k_2,\ldots,k_n\right)\ne \left(l_1,l_2,\ldots,l_n\right)$
. Imprecisely, this means that in the binary tree generated by
 $x_0$
and
$x_0$
and
 $x_1$
the vertices do not get close to each other. The reasoning is that if the length of the edge labelled
$x_1$
the vertices do not get close to each other. The reasoning is that if the length of the edge labelled
 $\mathcal{L}_*(\theta)$
in Figure 2 was in fact longer, then the branching edges would not be able to meet by the time they reached the boundary.
$\mathcal{L}_*(\theta)$
in Figure 2 was in fact longer, then the branching edges would not be able to meet by the time they reached the boundary.
Now let
 $\angle\left(x,o,y\right)$
denote the angle subtended at o by x and y. Fix distinct
$\angle\left(x,o,y\right)$
denote the angle subtended at o by x and y. Fix distinct
 $x_0,x_1\in{\mathbb{H}^d}$
such that
$x_0,x_1\in{\mathbb{H}^d}$
such that
 $\mathrm{dist}_{{\mathbb{H}^d}}(x_0,o),\mathrm{dist}_{{\mathbb{H}^d}}\left(x_1,o\right)>2\mathcal{L}_*(\theta)$
. Then, for
$\mathrm{dist}_{{\mathbb{H}^d}}(x_0,o),\mathrm{dist}_{{\mathbb{H}^d}}\left(x_1,o\right)>2\mathcal{L}_*(\theta)$
. Then, for
 $\varepsilon>0$
, we define the two frusta (cones without the point)
$\varepsilon>0$
, we define the two frusta (cones without the point)
 \begin{align*} \mathcal{V}_0 &\,:\!=\, \big\{y\in{\mathbb{H}^d}\colon \angle\left(x_0,o,y\right)<\varepsilon, \mathrm{dist}_{{\mathbb{H}^d}}(y,o)>2\mathcal{L}_*(\theta) \big\}, \\ \mathcal{V}_1 &\,:\!=\, \big\{y\in{\mathbb{H}^d}\colon \angle\left(x_1,o,y\right)<\varepsilon, \mathrm{dist}_{{\mathbb{H}^d}}(y,o)>2\mathcal{L}_*(\theta)\big\}. \end{align*}
\begin{align*} \mathcal{V}_0 &\,:\!=\, \big\{y\in{\mathbb{H}^d}\colon \angle\left(x_0,o,y\right)<\varepsilon, \mathrm{dist}_{{\mathbb{H}^d}}(y,o)>2\mathcal{L}_*(\theta) \big\}, \\ \mathcal{V}_1 &\,:\!=\, \big\{y\in{\mathbb{H}^d}\colon \angle\left(x_1,o,y\right)<\varepsilon, \mathrm{dist}_{{\mathbb{H}^d}}(y,o)>2\mathcal{L}_*(\theta)\big\}. \end{align*}
The
 $d=2$
versions of these are sketched in Figure 3. Then, for each
$d=2$
versions of these are sketched in Figure 3. Then, for each
 $n\geq 1$
and
$n\geq 1$
and
 $\mathbf{k}=\left(k_1,\ldots,k_n\right)\in\left\{0,1\right\}^n$
, we can define
$\mathbf{k}=\left(k_1,\ldots,k_n\right)\in\left\{0,1\right\}^n$
, we can define
 \begin{equation*} \mathcal{V}^{(n)}_{\mathbf{k}} \,:\!=\, \bigg\{y\in{\mathbb{H}^d}\colon \exists \left\{z_i\right\}^n_{i=1}\subset \prod^n_{i=1}\mathcal{V}_{k_i} \text{ s.t. } y = t_{z_n}t_{z_{n-1}}\ldots t_{z_{2}}t_{z_{1}}o\bigg\}. \end{equation*}
\begin{equation*} \mathcal{V}^{(n)}_{\mathbf{k}} \,:\!=\, \bigg\{y\in{\mathbb{H}^d}\colon \exists \left\{z_i\right\}^n_{i=1}\subset \prod^n_{i=1}\mathcal{V}_{k_i} \text{ s.t. } y = t_{z_n}t_{z_{n-1}}\ldots t_{z_{2}}t_{z_{1}}o\bigg\}. \end{equation*}
Then, for sufficiently small
 $\varepsilon$
, for all
$\varepsilon$
, for all
 $n\geq 1$
,
$n\geq 1$
,
 $\mathbf{k},\mathbf{m}\in\left\{0,1\right\}^n$
,
$\mathbf{k},\mathbf{m}\in\left\{0,1\right\}^n$
,
 $\mathbf{k}\ne \mathbf{m}$
implies that
$\mathbf{k}\ne \mathbf{m}$
implies that
 $\mathcal{V}^{(n)}_{\mathbf{k}}\cap \mathcal{V}^{(n)}_{\mathbf{m}} = \emptyset$
. Furthermore, if
$\mathcal{V}^{(n)}_{\mathbf{k}}\cap \mathcal{V}^{(n)}_{\mathbf{m}} = \emptyset$
. Furthermore, if
 $n_1<n_2$
and
$n_1<n_2$
and
 $(k_1,\ldots,k_{n_1})\ne (m_1,\ldots,m_{n_1})$
, then
$(k_1,\ldots,k_{n_1})\ne (m_1,\ldots,m_{n_1})$
, then
 $\mathcal{V}^{(n_1)}_{\mathbf{k}}\cap \mathcal{V}^{(n_2)}_{\mathbf{m}} = \emptyset$
.
$\mathcal{V}^{(n_1)}_{\mathbf{k}}\cap \mathcal{V}^{(n_2)}_{\mathbf{m}} = \emptyset$
.
Lemma 6.3. If
 $\#\mathcal E<\infty$
and (2.7) holds, then for all
$\#\mathcal E<\infty$
and (2.7) holds, then for all
 $p,q\in[1,\infty]$
, there exists
$p,q\in[1,\infty]$
, there exists
 $C_d=C_d(\varphi,p,q)<\infty$
such that, for sufficiently large L,
$C_d=C_d(\varphi,p,q)<\infty$
such that, for sufficiently large L,
 \begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{C_d}{\lVert {D_L}\rVert_{p\to q}}. \end{equation*}
\begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{C_d}{\lVert {D_L}\rVert_{p\to q}}. \end{equation*}
Sketch of the construction of the sets
 $\mathcal{V}_0$
and
$\mathcal{V}_0$
and
 $\mathcal{V}_1$
in
$\mathcal{V}_1$
in
 ${\mathbb{H}^2}$
.
${\mathbb{H}^2}$
.

Figure 3 Long description
The diagram illustrates the construction of two sets, V0 and V1, within the hyperbolic space H2. The sets are depicted as regions bounded by curved lines, with V0 being a larger region and V1 a smaller region within V0. A central point is connected to the boundaries of both sets by dashed lines, indicating a relationship or distance measurement between the point and the sets. The distance between the central point and the boundary of V0 is labeled as 2L times π divided by 2.
Proof. Since
 $\#\mathcal E<\infty$
, for each L, there exist
$\#\mathcal E<\infty$
, for each L, there exist
 $a^*_L,b^*_L\in\mathcal E$
such that
$a^*_L,b^*_L\in\mathcal E$
such that
 \begin{equation*} D_L\left(a^*_L,b^*_L\right) = \max_{a,b\in\mathcal E}D_L(a,b), \end{equation*}
\begin{equation*} D_L\left(a^*_L,b^*_L\right) = \max_{a,b\in\mathcal E}D_L(a,b), \end{equation*}
where we permit this maximum to be infinite. The symmetry of
 $\varphi$
also implies that
$\varphi$
also implies that
 $D_L(b^*_L,a^*_L) = \max_{a,b\in\mathcal E}D_L(a,b)$
. Observe that since
$D_L(b^*_L,a^*_L) = \max_{a,b\in\mathcal E}D_L(a,b)$
. Observe that since
 $\mathcal E$
is finite,
$\mathcal E$
is finite,
 $\max_{a,b\in\mathcal E}D_L(a,b)$
and all
$\max_{a,b\in\mathcal E}D_L(a,b)$
and all
 $\lVert {D_L}\rVert_{p\to q}$
are equivalent norms on
$\lVert {D_L}\rVert_{p\to q}$
are equivalent norms on
 $D_L$
. Furthermore, the finiteness of
$D_L$
. Furthermore, the finiteness of
 $\mathcal E$
and the convention that
$\mathcal E$
and the convention that
 $\mathcal P(a)>0$
for all
$\mathcal P(a)>0$
for all
 $a\in\mathcal E$
imply that
$a\in\mathcal E$
imply that
 $\liminf_{L\to \infty}\mathcal P(a^*_L)>0$
and
$\liminf_{L\to \infty}\mathcal P(a^*_L)>0$
and
 $\liminf_{L\to \infty}\mathcal P(b^*_L)>0$
.
$\liminf_{L\to \infty}\mathcal P(b^*_L)>0$
.
Now starting from
 ${o_{a^*_L}}$
, we aim to extract an infinite tree from
${o_{a^*_L}}$
, we aim to extract an infinite tree from
 $\mathscr {C}({o_{a^*_L}},\xi^{o_{a^*_L}})$
. By Mecke’s formula, the expected number of neighbours of
$\mathscr {C}({o_{a^*_L}},\xi^{o_{a^*_L}})$
. By Mecke’s formula, the expected number of neighbours of
 ${o_{a^*_L}}$
in
${o_{a^*_L}}$
in
 $\mathcal{V}_0\times\{b^*_L\}$
is given by
$\mathcal{V}_0\times\{b^*_L\}$
is given by
 \begin{align*} &\mathbb E_{\lambda,L}\big[\#\{y\in\eta\cap \mathcal{V}_0\times\big\{b^*_L\big\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\}\big] \\[2pt] &\qquad= \lambda\mathcal P\left(b^*_L\right)\int_{\mathcal{V}_0}\varphi_L\left(x;\,a^*_L,b^*_L\right) \mathrm{d} x \\[2pt] &\qquad= \lambda\mathcal P\left(b^*_L\right)c_d\int^\infty_{2\mathcal{L}_*(\theta)}\varphi_L\left(r;\,a^*_L,b^*_L\right)({\sinh}\, r)^{d-1}\mathrm{d} r, \end{align*}
\begin{align*} &\mathbb E_{\lambda,L}\big[\#\{y\in\eta\cap \mathcal{V}_0\times\big\{b^*_L\big\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\}\big] \\[2pt] &\qquad= \lambda\mathcal P\left(b^*_L\right)\int_{\mathcal{V}_0}\varphi_L\left(x;\,a^*_L,b^*_L\right) \mathrm{d} x \\[2pt] &\qquad= \lambda\mathcal P\left(b^*_L\right)c_d\int^\infty_{2\mathcal{L}_*(\theta)}\varphi_L\left(r;\,a^*_L,b^*_L\right)({\sinh}\, r)^{d-1}\mathrm{d} r, \end{align*}
where
 $c_d=c_d(\varepsilon)$
is the
$c_d=c_d(\varepsilon)$
is the
 $(d-1)$
-Lebesgue volume of the spherical cap
$(d-1)$
-Lebesgue volume of the spherical cap
 $\{y\in \partial \mathbb{B}\colon \angle$
$\{y\in \partial \mathbb{B}\colon \angle$
 $(y,o,x_0)<\varepsilon\}$
. Then by using (2.7), for sufficiently large L,
$(y,o,x_0)<\varepsilon\}$
. Then by using (2.7), for sufficiently large L,
 \begin{align*} \int^\infty_{2\mathcal{L}_*(\theta)}\varphi_L\left(r;\,a^*_L,b^*_L\right)({\sinh}\, r)^{d-1}\mathrm{d} r &\geq \frac{1}{2}\int^\infty_{0}\varphi_L\left(r;\,a^*_L,b^*_L\right)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &= \frac{1}{2\mathfrak{S}_{d-1}}D_L\left(a^*_L,b^*_L\right). \end{align*}
\begin{align*} \int^\infty_{2\mathcal{L}_*(\theta)}\varphi_L\left(r;\,a^*_L,b^*_L\right)({\sinh}\, r)^{d-1}\mathrm{d} r &\geq \frac{1}{2}\int^\infty_{0}\varphi_L\left(r;\,a^*_L,b^*_L\right)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &= \frac{1}{2\mathfrak{S}_{d-1}}D_L\left(a^*_L,b^*_L\right). \end{align*}
Therefore,
 \begin{equation*} \mathbb E_{\lambda,L}\big[\#\big\{y\in\eta\cap \mathcal{V}_0\times\big\{b^*_L\big\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big\}\big]\geq \lambda\mathcal P\left(b^*_L\right)\frac{c_d}{2\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big) \end{equation*}
\begin{equation*} \mathbb E_{\lambda,L}\big[\#\big\{y\in\eta\cap \mathcal{V}_0\times\big\{b^*_L\big\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big\}\big]\geq \lambda\mathcal P\left(b^*_L\right)\frac{c_d}{2\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big) \end{equation*}
for sufficiently large L.
Since the number of neighbours of
 ${o_{a^*_L}}$
is a Poisson random variable,
${o_{a^*_L}}$
is a Poisson random variable,
 \begin{align*} &\mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_0\times\{b^*_L\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big)\nonumber \\ &\qquad= 1 - \exp\big(-\mathbb E_{\lambda,L}\big[\#\big\{y\in\eta\cap \mathcal{V}_0\times\{b^*_L\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big\}\big]\big)\nonumber \\ &\qquad \geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(b^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg) \end{align*}
\begin{align*} &\mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_0\times\{b^*_L\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big)\nonumber \\ &\qquad= 1 - \exp\big(-\mathbb E_{\lambda,L}\big[\#\big\{y\in\eta\cap \mathcal{V}_0\times\{b^*_L\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big\}\big]\big)\nonumber \\ &\qquad \geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(b^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg) \end{align*}
for sufficiently large L. Similarly,
 \begin{align*} \mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_1\times\{b^*_L\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big) &\geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(b^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg), \\ \mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_0\times\{a^*_L\}\colon {o_{b^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{b^*_L}}}\big) &\geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(a^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg), \\ \mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_1\times\{a^*_L\}\colon {o_{b^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{b^*_L}}}\big) &\geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(a^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg). \end{align*}
\begin{align*} \mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_1\times\{b^*_L\}\colon {o_{a^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{a^*_L}}}\big) &\geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(b^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg), \\ \mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_0\times\{a^*_L\}\colon {o_{b^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{b^*_L}}}\big) &\geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(a^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg), \\ \mathbb{P}_{\lambda,L}\big(\exists y\in\eta\cap \mathcal{V}_1\times\{a^*_L\}\colon {o_{b^*_L}} \sim y\:\textrm{in}\: \xi^{{o_{b^*_L}}}\big) &\geq 1 - \exp\bigg(-\frac{1}{2}\lambda\mathcal P\big(a^*_L\big)\frac{c_d}{\mathfrak{S}_{d-1}} D_L\big(a^*_L,b^*_L\big)\bigg). \end{align*}
We now construct our tree. Starting from the
 $0{\rm th}$
generation
$0{\rm th}$
generation
 ${o_{a^*_L}}$
, we let our offspring be the nearest neighbour in the
${o_{a^*_L}}$
, we let our offspring be the nearest neighbour in the
 $\mathcal{V}_0\times\{b^*_L\}$
branch and the nearest neighbour in the
$\mathcal{V}_0\times\{b^*_L\}$
branch and the nearest neighbour in the
 $\mathcal{V}_1\times\{b^*_L\}$
branch (if either does not exist then that branch produces no offspring). Here
$\mathcal{V}_1\times\{b^*_L\}$
branch (if either does not exist then that branch produces no offspring). Here
 $\mathcal{V}_0$
and
$\mathcal{V}_0$
and
 $\mathcal{V}_1$
are disjoint, so these offspring are independent. Furthermore, the vertex set that is further from
$\mathcal{V}_1$
are disjoint, so these offspring are independent. Furthermore, the vertex set that is further from
 ${o_{a^*_L}}$
than these nearest neighbours is also independent of these neighbours. If a vertex
${o_{a^*_L}}$
than these nearest neighbours is also independent of these neighbours. If a vertex
 $(x,b^*_L)$
is one of these offspring (i.e. in generation 1), then it selects its offspring to be its nearest neighbour in
$(x,b^*_L)$
is one of these offspring (i.e. in generation 1), then it selects its offspring to be its nearest neighbour in
 $t_{x}\left(\mathcal{V}_0\right)\times\{a^*_L\}$
and its nearest neighbour in
$t_{x}\left(\mathcal{V}_0\right)\times\{a^*_L\}$
and its nearest neighbour in
 $t_{x}\left(\mathcal{V}_1\right)\times\{a^*_L\}$
. This is then repeated iteratively, alternating between
$t_{x}\left(\mathcal{V}_1\right)\times\{a^*_L\}$
. This is then repeated iteratively, alternating between
 $a^*_L$
and
$a^*_L$
and
 $b^*_L$
in each generation. From the construction of
$b^*_L$
in each generation. From the construction of
 $\mathcal{V}_0$
and
$\mathcal{V}_0$
and
 $\mathcal{V}_1$
, each offspring is independent from each other offspring in its generation and the offspring in previous generations (except its ancestral line).
$\mathcal{V}_1$
, each offspring is independent from each other offspring in its generation and the offspring in previous generations (except its ancestral line).
This random tree in
 ${\mathbb{H}^d}\times\mathcal E$
does not go extinct with a positive probability if the probability of each offspring is strictly greater than
${\mathbb{H}^d}\times\mathcal E$
does not go extinct with a positive probability if the probability of each offspring is strictly greater than
 $\frac{1}{2}$
. Therefore, if
$\frac{1}{2}$
. Therefore, if
 \begin{equation*} \frac{1}{2}\lambda\min\left\{\mathcal P\left(a^*_L\right),\mathcal P\left(b^*_L\right)\right\}\frac{c_d}{\mathfrak{S}_{d-1}} D_L\left(a^*_L,b^*_L\right) > \log 2 \end{equation*}
\begin{equation*} \frac{1}{2}\lambda\min\left\{\mathcal P\left(a^*_L\right),\mathcal P\left(b^*_L\right)\right\}\frac{c_d}{\mathfrak{S}_{d-1}} D_L\left(a^*_L,b^*_L\right) > \log 2 \end{equation*}
then the tree survives with a positive probability. Since this tree is a subset of
 $\mathscr {C}({o_{a^*_L}},\xi^{o_{a^*_L}})$
, the cluster is infinite with positive probability. Since
$\mathscr {C}({o_{a^*_L}},\xi^{o_{a^*_L}})$
, the cluster is infinite with positive probability. Since
 $\mathcal P(a^*_L)>0$
, we therefore have
$\mathcal P(a^*_L)>0$
, we therefore have
 \begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{2\mathfrak{S}_{d-1}\log 2}{c_d\min\big\{\mathcal P\big(a^*_L\big),\mathcal P\big(b^*_L\big)\big\} D_L\big(a^*_L,b^*_L\big)}. \end{equation*}
\begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{2\mathfrak{S}_{d-1}\log 2}{c_d\min\big\{\mathcal P\big(a^*_L\big),\mathcal P\big(b^*_L\big)\big\} D_L\big(a^*_L,b^*_L\big)}. \end{equation*}
Then from
 $\liminf_{L\to \infty}\mathcal P(a^*_L)>0$
and
$\liminf_{L\to \infty}\mathcal P(a^*_L)>0$
and
 $\liminf_{L\to \infty}\mathcal P(b^*_L)>0$
, and the equivalence of norms, the result follows.
$\liminf_{L\to \infty}\mathcal P(b^*_L)>0$
, and the equivalence of norms, the result follows.
There are two main difficulties in applying the above argument to cases with infinitely many marks. The first is that we no longer have equivalence on norms on kernels on
 $\mathcal E^2$
. The second (and more serious) is that it is now possible that the significant marks move around infinitely many sets in ways that are very specific to the model in question and are difficult to control. Both of these issues can be solved by using the volume-linear scaling function. The property that
$\mathcal E^2$
. The second (and more serious) is that it is now possible that the significant marks move around infinitely many sets in ways that are very specific to the model in question and are difficult to control. Both of these issues can be solved by using the volume-linear scaling function. The property that
 \begin{equation*} D_L(a,b) = LD(a,b)\end{equation*}
\begin{equation*} D_L(a,b) = LD(a,b)\end{equation*}
for all
 $a,b\in\mathcal E$
and L ensures that the same marks are the significant ones for all scales. This—with the homogeneity of the norms—also implies that all
$a,b\in\mathcal E$
and L ensures that the same marks are the significant ones for all scales. This—with the homogeneity of the norms—also implies that all
 $\lVert {D_L}\rVert_{p\to q} = L\lVert {D}\rVert_{p\to q}$
. Therefore, if
$\lVert {D_L}\rVert_{p\to q} = L\lVert {D}\rVert_{p\to q}$
. Therefore, if
 $\lVert {D}\rVert_{p\to q}<\infty$
then the L in the denominator in Lemma 6.4 could be replaced with
$\lVert {D}\rVert_{p\to q}<\infty$
then the L in the denominator in Lemma 6.4 could be replaced with
 $\lVert {D_L}\rVert_{p\to q}$
as in Lemma 6.3.
$\lVert {D_L}\rVert_{p\to q}$
as in Lemma 6.3.
Lemma 6.4. If
 $\sigma_L(r)$
is volume-linear then there exists
$\sigma_L(r)$
is volume-linear then there exists
 $C_d=C_d(\varphi)<\infty$
such that, for sufficiently large L,
$C_d=C_d(\varphi)<\infty$
such that, for sufficiently large L,
 \begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{C_d}{L}. \end{equation*}
\begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{C_d}{L}. \end{equation*}
Proof. We proceed similarly to the proof of the finitely many mark case, but instead of the two single marks
 $a^*_L$
and
$a^*_L$
and
 $b^*_L$
, we use sets
$b^*_L$
, we use sets
 $E,F\subset\mathcal E$
and now our choice of
$E,F\subset\mathcal E$
and now our choice of
 $s_L$
will ensure that we do not need to vary these sets as L changes.
$s_L$
will ensure that we do not need to vary these sets as L changes.
Since
 $\varphi\not\equiv 0$
, we have
$\varphi\not\equiv 0$
, we have
 $\textrm{ess sup}_{a,b\in\mathcal E}D(a,b)>0$
. Therefore, there exists
$\textrm{ess sup}_{a,b\in\mathcal E}D(a,b)>0$
. Therefore, there exists
 $\varepsilon>0$
such that we can choose non-
$\varepsilon>0$
such that we can choose non-
 $\mathcal P$
-null sets
$\mathcal P$
-null sets
 $E,F\subset\mathcal E$
such that
$E,F\subset\mathcal E$
such that
 \begin{equation} \textrm{ess inf}_{a\in E,b\in F}D(a,b) \in\left(\varepsilon,\infty\right). \end{equation}
\begin{equation} \textrm{ess inf}_{a\in E,b\in F}D(a,b) \in\left(\varepsilon,\infty\right). \end{equation}
Now let
 $a\in E$
. By Mecke’s formula, the expected number of neighbours of
$a\in E$
. By Mecke’s formula, the expected number of neighbours of
 ${o_{a}}$
in
${o_{a}}$
in
 $\mathcal{V}_0\times F$
is given by
$\mathcal{V}_0\times F$
is given by
 \begin{align*} \mathbb E_{\lambda,L}\left[\#\left\{y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right\}\right] &= \lambda\int_F\int_{\mathcal{V}_0}\varphi_L\left(x;\,a,b\right)\mathrm{d} x\mathcal P(\mathrm{d} b) \\ &= \lambda c_d\int_F \int^\infty_{2\mathcal{L}_*(\theta)} \varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r\mathcal P(\mathrm{d} b). \end{align*}
\begin{align*} \mathbb E_{\lambda,L}\left[\#\left\{y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right\}\right] &= \lambda\int_F\int_{\mathcal{V}_0}\varphi_L\left(x;\,a,b\right)\mathrm{d} x\mathcal P(\mathrm{d} b) \\ &= \lambda c_d\int_F \int^\infty_{2\mathcal{L}_*(\theta)} \varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r\mathcal P(\mathrm{d} b). \end{align*}
Since
 $\varphi\leq 1$
, we have
$\varphi\leq 1$
, we have
 \begin{align*} &\mathbb E_{\lambda,L}\big[\#\left\{y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right\}\big] \\ &\qquad\geq \frac{\lambda c_d}{\mathfrak{S}_{d-1}} \int_F D_L(a,b)\mathcal P(\mathrm{d} b) - \lambda c_d\mathcal P(F) \mathbf{V}_d\left(2\mathcal{L}_*(\theta)\right). \end{align*}
\begin{align*} &\mathbb E_{\lambda,L}\big[\#\left\{y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right\}\big] \\ &\qquad\geq \frac{\lambda c_d}{\mathfrak{S}_{d-1}} \int_F D_L(a,b)\mathcal P(\mathrm{d} b) - \lambda c_d\mathcal P(F) \mathbf{V}_d\left(2\mathcal{L}_*(\theta)\right). \end{align*}
Since our scaling function is volume-linear, we have
 $D_L(a,b)= L D(a,b)$
for all
$D_L(a,b)= L D(a,b)$
for all
 $a,b\in\mathcal E$
, and therefore, (6.1) implies that, for sufficiently large L, we have
$a,b\in\mathcal E$
, and therefore, (6.1) implies that, for sufficiently large L, we have
 \begin{equation*} \mathbb E_{\lambda,L}\left[\#\left\{y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right\}\right] \geq \lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(F). \end{equation*}
\begin{equation*} \mathbb E_{\lambda,L}\left[\#\left\{y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right\}\right] \geq \lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(F). \end{equation*}
Repeating this argument in all our required cases gives
 \begin{align*} \textrm{ess inf}_{a\in E}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(F)\right), \\ \textrm{ess inf}_{a\in E}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_1\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(F)\right), \\ \textrm{ess inf}_{a\in F}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_0\times E\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(E)\right), \\ \textrm{ess inf}_{a\in F}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_1\times E\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(E)\right). \end{align*}
\begin{align*} \textrm{ess inf}_{a\in E}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_0\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(F)\right), \\ \textrm{ess inf}_{a\in E}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_1\times F\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(F)\right), \\ \textrm{ess inf}_{a\in F}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_0\times E\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(E)\right), \\ \textrm{ess inf}_{a\in F}\mathbb{P}_{\lambda,L}\left(\exists y\in\eta\cap \mathcal{V}_1\times E\colon {o_{a}} \sim y\:\textrm{in}\: \xi^{{o_{a}}}\right) &\geq 1 - \exp\left(-\lambda \frac{c_d}{2\mathfrak{S}_{d-1}}L\varepsilon\mathcal P(E)\right). \end{align*}
Constructing the tree in the same way, replacing the singletons
 $a^*_L$
and
$a^*_L$
and
 $b^*_L$
with the sets E and F then tells us that
$b^*_L$
with the sets E and F then tells us that
 \begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{2\mathfrak{S}_{d-1}\log 2}{c_d\min\left\{\mathcal P(E),\mathcal P(F)\right\} L \varepsilon} \end{equation*}
\begin{equation*} \lambda_{\mathrm{c}}(L) \leq \frac{2\mathfrak{S}_{d-1}\log 2}{c_d\min\left\{\mathcal P(E),\mathcal P(F)\right\} L \varepsilon} \end{equation*}
for sufficiently large L.
Proof of Theorem
2.1. Both assumptions 1 and 2 with Lemma 5.1 imply that the integral
 $\int^\infty_0\varphi_L(r;\,a,b)Q_d(r)\mathrm{e}^{(d-1)r}\mathrm{d} r<\infty$
for
$\int^\infty_0\varphi_L(r;\,a,b)Q_d(r)\mathrm{e}^{(d-1)r}\mathrm{d} r<\infty$
for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
and
$a,b\in\mathcal E$
and
 $\lVert {\widetilde{\varPhi}_L(0)}\rVert_{2\to 2}<\infty$
for all sufficiently large L. Therefore, by applying Lemma 5.4 to the adjacency function
$\lVert {\widetilde{\varPhi}_L(0)}\rVert_{2\to 2}<\infty$
for all sufficiently large L. Therefore, by applying Lemma 5.4 to the adjacency function
 $\varphi_L$
, we see that
$\varphi_L$
, we see that
 $\lVert {\varPhi_L}\rVert_{2\to 2} = o\left( \lVert {D_L}\rVert_{2\to 2}\right)$
as
$\lVert {\varPhi_L}\rVert_{2\to 2} = o\left( \lVert {D_L}\rVert_{2\to 2}\right)$
as
 $L\to \infty$
.
$L\to \infty$
.
Under Assumption 1, Lemma 6.3 then implies that
 $\lambda_{\mathrm{c}}(L) =o\left( \lVert {\varPhi_L}\rVert_{2\to 2}^{-1}\right)$
as
$\lambda_{\mathrm{c}}(L) =o\left( \lVert {\varPhi_L}\rVert_{2\to 2}^{-1}\right)$
as
 $L\to \infty$
. If
$L\to \infty$
. If
 $\lVert {D}\rVert_{p\to p}<\infty$
for any
$\lVert {D}\rVert_{p\to p}<\infty$
for any
 $p\in[1,\infty]$
then Lemma 6.4 proves the same asymptotic behaviour under Assumption 2. If
$p\in[1,\infty]$
then Lemma 6.4 proves the same asymptotic behaviour under Assumption 2. If
 $\lVert {D}\rVert_{2\to 2}=\infty$
(and, therefore,
$\lVert {D}\rVert_{2\to 2}=\infty$
(and, therefore,
 $\lVert {D}\rVert_{p\to p}=\infty$
for all
$\lVert {D}\rVert_{p\to p}=\infty$
for all
 $p\in[1,\infty]$
by the reasoning in Remark 6.1), then Lemma 5.5 is also required to show that
$p\in[1,\infty]$
by the reasoning in Remark 6.1), then Lemma 5.5 is also required to show that
 $\lambda_{\mathrm{c}}(L) \leq {C_d}/{L} \ll {1}/{\lVert {\varPhi_L}\rVert_{2\to 2}}$
as
$\lambda_{\mathrm{c}}(L) \leq {C_d}/{L} \ll {1}/{\lVert {\varPhi_L}\rVert_{2\to 2}}$
as
 $L\to\infty$
.
$L\to\infty$
.
Finally, Lemma 6.1 tells us that
 ${1}/{\lVert {\varPhi_L}\rVert_{2\to 2}} \leq \lambda_{u}(L)$
for all L, and therefore, for sufficiently large L, we have
${1}/{\lVert {\varPhi_L}\rVert_{2\to 2}} \leq \lambda_{u}(L)$
for all L, and therefore, for sufficiently large L, we have
 $\lambda_{\mathrm{c}}(L)<\lambda_{\mathrm{u}}(L)$
.
$\lambda_{\mathrm{c}}(L)<\lambda_{\mathrm{u}}(L)$
.
6.2. Proof of critical exponents
Remark 6.2. If we were to consider BBP on a given graph then usually the finiteness of the triangle diagram (
 $\triangle_\lambda$
in our case) at criticality would be sufficient to derive mean-field behaviour for various critical exponents. This is because finiteness would show that an open triangle condition would hold, and it is this that is actually used to derive critical exponents. For BBP on
$\triangle_\lambda$
in our case) at criticality would be sufficient to derive mean-field behaviour for various critical exponents. This is because finiteness would show that an open triangle condition would hold, and it is this that is actually used to derive critical exponents. For BBP on
 $\mathbb Z^d$
with nearest neighbour edges, the fact that the triangle condition implied the open triangle condition was proven in [Reference Barsky and Aizenman3], and it was proven in [Reference Kozma29] for any transitive graph. Both of these use the fact that the two-point function is of positive type on the set of vertices. However, the differentiability (and therefore continuity) of the two-point function for RCMs on
$\mathbb Z^d$
with nearest neighbour edges, the fact that the triangle condition implied the open triangle condition was proven in [Reference Barsky and Aizenman3], and it was proven in [Reference Kozma29] for any transitive graph. Both of these use the fact that the two-point function is of positive type on the set of vertices. However, the differentiability (and therefore continuity) of the two-point function for RCMs on
 $\mathbb R^d$
shown by Heydenreich et al. [Reference Heydenreich, van der Hofstad, Last and Matzke22, Lemma 2.2] and the equality
$\mathbb R^d$
shown by Heydenreich et al. [Reference Heydenreich, van der Hofstad, Last and Matzke22, Lemma 2.2] and the equality
 $\tau_0(\mathbf{x},\mathbf{y}) = \varphi(\mathbf{x},\mathbf{y})$
shows that this need not be true for RCMs for which the adjacency function is not itself of a positive type (such as the Boolean disc model).
$\tau_0(\mathbf{x},\mathbf{y}) = \varphi(\mathbf{x},\mathbf{y})$
shows that this need not be true for RCMs for which the adjacency function is not itself of a positive type (such as the Boolean disc model).
Lemma 6.5. If Assumption 1 holds, or Assumption 2 and
 \begin{equation} {\mathrm {ess sup}}_{a\in\mathcal E} \int_{\mathcal E}\int_{{\mathbb{H}^d}}\varphi_L(x;\,a,b)^2\mu(\mathrm{d} x)\mathcal P(\mathrm{d} b)<\infty \end{equation}
\begin{equation} {\mathrm {ess sup}}_{a\in\mathcal E} \int_{\mathcal E}\int_{{\mathbb{H}^d}}\varphi_L(x;\,a,b)^2\mu(\mathrm{d} x)\mathcal P(\mathrm{d} b)<\infty \end{equation}
hold for sufficiently large L, then
 \begin{equation*} \lim_{L\to\infty}\triangle_{\lambda_{\mathrm{c}}(L)}= 0. \end{equation*}
\begin{equation*} \lim_{L\to\infty}\triangle_{\lambda_{\mathrm{c}}(L)}= 0. \end{equation*}
Proof. From Lemma 4.4 and having
 $\lambda_{2\to 2}(L)>\lambda_{\mathrm{c}}(L)$
for sufficiently large L, the condition (6.2) implies that
$\lambda_{2\to 2}(L)>\lambda_{\mathrm{c}}(L)$
for sufficiently large L, the condition (6.2) implies that
 $\triangle_{\lambda_{\mathrm{c}}(L)}<\infty$
for sufficiently large L. We now need to show that it is in fact ‘small’.
$\triangle_{\lambda_{\mathrm{c}}(L)}<\infty$
for sufficiently large L. We now need to show that it is in fact ‘small’.
Repeating the argument of the proof of Lemma 4.4, we can show that
 \begin{align*} \triangle_{\lambda_{\mathrm{c}}(L)} &\leq \Big(\lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2} + 2\lambda_{\mathrm{c}}(L)^2\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}^2 + \lambda_{\mathrm{c}}(L)^3\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}^3\Big) \\ & \quad \times\lambda_{\mathrm{c}}(L)\textrm{ ess sup}_{a\in\mathcal E} \int_{\mathcal E}\int_{{\mathbb{H}^d}}\varphi_L(x;\,a,b)^2\mu(\mathrm{d} x)\mathcal P(\mathrm{d} b). \end{align*}
\begin{align*} \triangle_{\lambda_{\mathrm{c}}(L)} &\leq \Big(\lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2} + 2\lambda_{\mathrm{c}}(L)^2\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}^2 + \lambda_{\mathrm{c}}(L)^3\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}^3\Big) \\ & \quad \times\lambda_{\mathrm{c}}(L)\textrm{ ess sup}_{a\in\mathcal E} \int_{\mathcal E}\int_{{\mathbb{H}^d}}\varphi_L(x;\,a,b)^2\mu(\mathrm{d} x)\mathcal P(\mathrm{d} b). \end{align*}
Now we can use
 $\varphi_L\leq 1$
to obtain
$\varphi_L\leq 1$
to obtain
 \begin{align*} \lambda_{\mathrm{c}}(L)\textrm{ ess sup}_{a\in\mathcal E}\int_{\mathcal E}\int_{{\mathbb{H}^d}}\varphi_L(x;\,a,b)^2\mu(\mathrm{d} x)\mathcal P(\mathrm{d} b) &\leq \lambda_{\mathrm{c}}(L)\textrm{ ess sup}_{a\in\mathcal E}\int_{\mathcal E}D_L(a,b)\mathcal P(\mathrm{d} b)\nonumber\\ &= \lambda_{\mathrm{c}}(L)\lVert {D_L}\rVert_{1\to 1}\nonumber\\ &\leq C_d, \end{align*}
\begin{align*} \lambda_{\mathrm{c}}(L)\textrm{ ess sup}_{a\in\mathcal E}\int_{\mathcal E}\int_{{\mathbb{H}^d}}\varphi_L(x;\,a,b)^2\mu(\mathrm{d} x)\mathcal P(\mathrm{d} b) &\leq \lambda_{\mathrm{c}}(L)\textrm{ ess sup}_{a\in\mathcal E}\int_{\mathcal E}D_L(a,b)\mathcal P(\mathrm{d} b)\nonumber\\ &= \lambda_{\mathrm{c}}(L)\lVert {D_L}\rVert_{1\to 1}\nonumber\\ &\leq C_d, \end{align*}
where
 $C_d$
is the constant arising in Lemma 6.3 or Lemma 6.4 as appropriate. We therefore only need to show that
$C_d$
is the constant arising in Lemma 6.3 or Lemma 6.4 as appropriate. We therefore only need to show that
 $\lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}\to 0$
as
$\lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}\to 0$
as
 $L\to\infty$
.
$L\to\infty$
.
By using the bound (4.2) arising from bounding
 $\tau_\lambda$
with
$\tau_\lambda$
with
 $g_\lambda$
, we obtain
$g_\lambda$
, we obtain
 \begin{equation*} \lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2} \leq \sum_{k=1}^\infty\lambda_{\mathrm{c}}(L)^k\lVert {\varPhi_L}\rVert_{2\to 2}^k. \end{equation*}
\begin{equation*} \lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2} \leq \sum_{k=1}^\infty\lambda_{\mathrm{c}}(L)^k\lVert {\varPhi_L}\rVert_{2\to 2}^k. \end{equation*}
Since we have
 $\lambda_{\mathrm{c}}(L)\ll{1}/{\lVert {\varPhi_L}\rVert_{2\to 2}}$
as
$\lambda_{\mathrm{c}}(L)\ll{1}/{\lVert {\varPhi_L}\rVert_{2\to 2}}$
as
 $L\to\infty$
, we therefore have
$L\to\infty$
, we therefore have
 $\lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}\to 0$
and
$\lambda_{\mathrm{c}}(L)\lVert {\mathcal{T}_{\lambda_{\mathrm{c}}(L),L}}\rVert_{2\to 2}\to 0$
and
 $\triangle_{\lambda_{\mathrm{c}}(L)}\to 0$
as
$\triangle_{\lambda_{\mathrm{c}}(L)}\to 0$
as
 $L\to\infty$
.
$L\to\infty$
.
We now want to use results from [Reference Caicedo and Dickson9] to show that a form of triangle condition does indeed imply that certain critical exponents take their mean-field values. Let us introduce some notation so we can use their result. Given
 $\lambda>0$
,
$\lambda>0$
,
 $a\in\mathcal E$
, and
$a\in\mathcal E$
, and
 $L>0$
, define
$L>0$
, define
 \begin{align*} \mathcal{I}_{\lambda,a}(L) &\,:\!=\, \bigg(\!\sup\nolimits_{k\geq 1}\bigg(\frac{\lambda}{1+\lambda}\bigg)^k\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b)\bigg)^{-1},\\ \mathcal{J}_{\lambda,a}(L) &\,:\!=\, \bigg(\!\sup\nolimits_{k\geq 1}\bigg(\frac{\lambda}{2\left(1+\lambda\right)}\bigg)^k\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b)\bigg)^{-1},\\ \overline{c}_{\lambda}(L) &\,:\!=\, 1+\lambda\textrm{ess sup}_{a,b,c\in\mathcal E}D_L(a,b)\mathcal{J}_{\lambda,c}(L),\\ C_\Delta(L) &\,:\!=\, \min\left\{\frac{1}{\left(1+\lambda_T(L)\textrm{ ess sup}_{a,b,c\in\mathcal E}D_L(a,b)\mathcal{I}_{\lambda_T(L),c}(L)\right)^2},\right.\nonumber\\ & \qquad\qquad\qquad \left.\frac{1}{\overline{c}_{\lambda_T(L)}(L)}\frac{\lambda_T(L)^2\left(\textrm{ess inf}_{a\in\mathcal E} \int D_L(a,b)\mathcal P(\mathrm{d} b)\right)^2}{1 + 2\lambda_T(L)\textrm{ ess sup}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b)}\right\}.\end{align*}
\begin{align*} \mathcal{I}_{\lambda,a}(L) &\,:\!=\, \bigg(\!\sup\nolimits_{k\geq 1}\bigg(\frac{\lambda}{1+\lambda}\bigg)^k\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b)\bigg)^{-1},\\ \mathcal{J}_{\lambda,a}(L) &\,:\!=\, \bigg(\!\sup\nolimits_{k\geq 1}\bigg(\frac{\lambda}{2\left(1+\lambda\right)}\bigg)^k\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b)\bigg)^{-1},\\ \overline{c}_{\lambda}(L) &\,:\!=\, 1+\lambda\textrm{ess sup}_{a,b,c\in\mathcal E}D_L(a,b)\mathcal{J}_{\lambda,c}(L),\\ C_\Delta(L) &\,:\!=\, \min\left\{\frac{1}{\left(1+\lambda_T(L)\textrm{ ess sup}_{a,b,c\in\mathcal E}D_L(a,b)\mathcal{I}_{\lambda_T(L),c}(L)\right)^2},\right.\nonumber\\ & \qquad\qquad\qquad \left.\frac{1}{\overline{c}_{\lambda_T(L)}(L)}\frac{\lambda_T(L)^2\left(\textrm{ess inf}_{a\in\mathcal E} \int D_L(a,b)\mathcal P(\mathrm{d} b)\right)^2}{1 + 2\lambda_T(L)\textrm{ ess sup}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b)}\right\}.\end{align*}
Following the naming from [Reference Caicedo and Dickson9], we have the following three conditions:
-
(D.1)
$\textrm{ess sup}_{a,b\in\mathcal E}D_L(a,b) < \infty,$
-
(D.2)
$\textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b) >0,$
-
(T)
$\triangle_{\lambda_T(L)} < C_\Delta(L).$



The following proposition is an amalgamation of Theorems 1.7, 1.8, 1.9, 1.11, and 1.12, and Corollary 1.10, all from [Reference Caicedo and Dickson9]. The notation ‘
 $\asymp$
’ is used to denote asymptotic equality ‘in the bounded ratio sense.’
$\asymp$
’ is used to denote asymptotic equality ‘in the bounded ratio sense.’
Proposition 6.1. If conditions (D.1), (D.2), and (T) all hold for some L then
 \begin{gather*} \lVert {\chi_{\lambda,L}}\rVert_p \asymp \left(\lambda_{\mathrm{c}}(L)-\lambda\right)^{-1} \quad \text{as }\lambda\nearrow\lambda_{\mathrm{c}}(L), \\ \lVert {\theta_{\lambda,L}}\rVert_p \asymp \lambda-\lambda_{\mathrm{c}}(L) \quad\text{as }\lambda\searrow\lambda_{\mathrm{c}}(L), \\ \mathbb{P}_{\lambda_{\mathrm{c}}(L),L}\big(\#\mathscr {C}\big({o_{a}},\xi^{{o_{a}}}\big) \geq n\big) \asymp n^{-{1}/{2}} \quad \text{as }n\to\infty, \end{gather*}
\begin{gather*} \lVert {\chi_{\lambda,L}}\rVert_p \asymp \left(\lambda_{\mathrm{c}}(L)-\lambda\right)^{-1} \quad \text{as }\lambda\nearrow\lambda_{\mathrm{c}}(L), \\ \lVert {\theta_{\lambda,L}}\rVert_p \asymp \lambda-\lambda_{\mathrm{c}}(L) \quad\text{as }\lambda\searrow\lambda_{\mathrm{c}}(L), \\ \mathbb{P}_{\lambda_{\mathrm{c}}(L),L}\big(\#\mathscr {C}\big({o_{a}},\xi^{{o_{a}}}\big) \geq n\big) \asymp n^{-{1}/{2}} \quad \text{as }n\to\infty, \end{gather*}
for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a\in\mathcal E$
, for all
$a\in\mathcal E$
, for all
 $p\in[1,\infty]$
, and that L in question. In particular,
$p\in[1,\infty]$
, and that L in question. In particular,
 $\lambda_T(L)=\lambda_{\mathrm{c}}(L)$
.
$\lambda_T(L)=\lambda_{\mathrm{c}}(L)$
.
While the argument in [Reference Caicedo and Dickson9] is phrased for RCMs on
 $\mathbb R^d\times\mathcal E$
, the argument follows in exactly the same way for RCMs on
$\mathbb R^d\times\mathcal E$
, the argument follows in exactly the same way for RCMs on
 ${\mathbb{H}^d}\times\mathcal E$
.
${\mathbb{H}^d}\times\mathcal E$
.
Now if conditions (D.1), (D.2), and (T) can all be shown to hold, Theorem 2.2 will be proven. Conditions (D.1) and (D.2) follow fairly directly from the extra ingredients of Assumptions 3 and 4 In Assumption 3, (2.12) implies that
 $\max_{a,b\in\mathcal E} D_L(a,b)<\infty$
for all L (since
$\max_{a,b\in\mathcal E} D_L(a,b)<\infty$
for all L (since
 $D_L(a,b)$
is non-decreasing in L), and (2.13) implies that
$D_L(a,b)$
is non-decreasing in L), and (2.13) implies that
 $\max_{a\in\mathcal E}\sup_{k\geq 1}$
$\max_{a\in\mathcal E}\sup_{k\geq 1}$
 $\min_{b\in\mathcal E} D^{(k)}_L(a,b)>0$
for all sufficiently large L. Therefore, Assumption 3 implies that conditions (D.1) and (D.2) of [Reference Caicedo and Dickson9] both hold.
$\min_{b\in\mathcal E} D^{(k)}_L(a,b)>0$
for all sufficiently large L. Therefore, Assumption 3 implies that conditions (D.1) and (D.2) of [Reference Caicedo and Dickson9] both hold.
In Assumption 4, conditions (2.14) and (2.16) are precisely the conditions (D.1) and (D.2) of [Reference Caicedo and Dickson9] for the model with the reference adjacency function,
 $\varphi$
, and (2.15) makes it feasible for condition (T) to hold. The choice of a volume-linear scaling then means that these values change in an explicit way, and we can show that all conditions (D.1), (D.2), and (T) hold for the scaled versions of the model.
$\varphi$
, and (2.15) makes it feasible for condition (T) to hold. The choice of a volume-linear scaling then means that these values change in an explicit way, and we can show that all conditions (D.1), (D.2), and (T) hold for the scaled versions of the model.
This leaves only condition (T) to address.
Lemma 6.6. If
 $\#\mathcal E<\infty$
, and
$\#\mathcal E<\infty$
, and
 \begin{align} \liminf_{L\to\infty}\sup\nolimits_{k\geq 1}\frac{\min_{a,b\in\mathcal E} D^{(k)}_L(a,b)}{\left(\max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b)\right)^k} >0,\end{align}
\begin{align} \liminf_{L\to\infty}\sup\nolimits_{k\geq 1}\frac{\min_{a,b\in\mathcal E} D^{(k)}_L(a,b)}{\left(\max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b)\right)^k} >0,\end{align}
 \begin{align} \qquad\qquad\limsup_{L\to\infty}\frac{\max_{a,b\in\mathcal E} D_L(a,b)}{\min_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b)} < \infty \end{align}
\begin{align} \qquad\qquad\limsup_{L\to\infty}\frac{\max_{a,b\in\mathcal E} D_L(a,b)}{\min_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b)} < \infty \end{align}
both hold, then there exists
 $\varepsilon>0$
such that
$\varepsilon>0$
such that
 \begin{equation*} C_\Delta(L) \geq \varepsilon \end{equation*}
\begin{equation*} C_\Delta(L) \geq \varepsilon \end{equation*}
for sufficiently large L.
Proof. For succinctness, let us denote
 \begin{gather*} \overline{A}_\star(L) \,:\!=\, \max_{a,b\in\mathcal E} D_L(a,b), \qquad \overline{A}(L) \,:\!=\, \max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b), \\ \underline{A}(L) \,:\!=\, \min_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b), \qquad \underline{A}^{(k)}_\star(L) \,:\!=\, \min_{a,b\in\mathcal E} D^{(k)}_L(a,b). \end{gather*}
\begin{gather*} \overline{A}_\star(L) \,:\!=\, \max_{a,b\in\mathcal E} D_L(a,b), \qquad \overline{A}(L) \,:\!=\, \max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b), \\ \underline{A}(L) \,:\!=\, \min_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P(b), \qquad \underline{A}^{(k)}_\star(L) \,:\!=\, \min_{a,b\in\mathcal E} D^{(k)}_L(a,b). \end{gather*}
First observe that
 \begin{align*} \max_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) &= \left(\min_{a\in\mathcal E}\sup\nolimits_{k\geq 1}\left(\frac{\lambda_T(L)}{1+\lambda_T(L)}\right)^k\min_{b\in\mathcal E}D_L^{(k)}(a,b)\right)^{-1} \\ &= \left(\sup\nolimits_{k\geq 1}\left(\frac{\lambda_T(L)}{1+\lambda_T(L)}\right)^k\underline{A}^{(k)}_\star(L)\right)^{-1}. \end{align*}
\begin{align*} \max_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) &= \left(\min_{a\in\mathcal E}\sup\nolimits_{k\geq 1}\left(\frac{\lambda_T(L)}{1+\lambda_T(L)}\right)^k\min_{b\in\mathcal E}D_L^{(k)}(a,b)\right)^{-1} \\ &= \left(\sup\nolimits_{k\geq 1}\left(\frac{\lambda_T(L)}{1+\lambda_T(L)}\right)^k\underline{A}^{(k)}_\star(L)\right)^{-1}. \end{align*}
Then from Lemmata 4.1 and 6.3 there exist constants
 $c_1,c_2\in(0,\infty)$
such that
$c_1,c_2\in(0,\infty)$
such that
 \begin{equation*} \frac{c_1}{\overline{A}(L)} \leq \lambda_T(L) \leq \frac{c_2}{\overline{A}(L)}. \end{equation*}
\begin{equation*} \frac{c_1}{\overline{A}(L)} \leq \lambda_T(L) \leq \frac{c_2}{\overline{A}(L)}. \end{equation*}
This means that
 \begin{equation*} \max_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) \leq \left(\sup\nolimits_{k\geq 1}\left(\frac{c_1}{c_1 + \overline{A}(L)}\right)^k\underline{A}^{(k)}_\star(L)\right)^{-1}. \end{equation*}
\begin{equation*} \max_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) \leq \left(\sup\nolimits_{k\geq 1}\left(\frac{c_1}{c_1 + \overline{A}(L)}\right)^k\underline{A}^{(k)}_\star(L)\right)^{-1}. \end{equation*}
Then (6.3) implies that there exists a constant
 $C<\infty$
such that
$C<\infty$
such that
 \begin{equation*} \max_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) \leq C, \qquad \max_{a\in\mathcal E}\mathcal{J}_{\lambda_T(L),a}(L) \leq C \end{equation*}
\begin{equation*} \max_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) \leq C, \qquad \max_{a\in\mathcal E}\mathcal{J}_{\lambda_T(L),a}(L) \leq C \end{equation*}
for all
 $L\geq 1$
. We also have
$L\geq 1$
. We also have
 \begin{equation*} \limsup_{L\to\infty}\frac{\overline{A}_\star(L)}{\overline{A}(L)}\leq \limsup_{L\to\infty}\frac{\overline{A}_\star(L)}{\underline{A}(L)}<\infty, \end{equation*}
\begin{equation*} \limsup_{L\to\infty}\frac{\overline{A}_\star(L)}{\overline{A}(L)}\leq \limsup_{L\to\infty}\frac{\overline{A}_\star(L)}{\underline{A}(L)}<\infty, \end{equation*}
which then implies that there exists a constant
 $C'<\infty$
such that
$C'<\infty$
such that
 \begin{gather*} \overline{c}_{\lambda_T(L)}(L) \leq 1 + C',\\ \Big(1+\lambda_T(L)\max_{a,b,c\in\mathcal E} D_L(a,b)\mathcal{I}_{\lambda_T(L),c}(L)\Big)^{-2} \geq (1+C')^{-2}. \end{gather*}
\begin{gather*} \overline{c}_{\lambda_T(L)}(L) \leq 1 + C',\\ \Big(1+\lambda_T(L)\max_{a,b,c\in\mathcal E} D_L(a,b)\mathcal{I}_{\lambda_T(L),c}(L)\Big)^{-2} \geq (1+C')^{-2}. \end{gather*}
Therefore,
 \begin{align*} \frac{1}{\overline{c}_{\lambda_T(L)}(L)}\frac{\lambda_T(L)^2 ({\min}_{a\in\mathcal E} \sum_{b\in\mathcal E} D_L(a,b)\mathcal P( b))^2}{1 + 2\lambda_T(L)\max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P( b)} \nonumber & \geq \frac{1}{1 + C'}\frac{\lambda_T(L)^2\underline{A}(L)^2}{1 + 2\lambda_T(L)\overline{A}(L)}\nonumber \\ & \geq \frac{1}{1 + C'}\frac{c_1^2}{1 + 2c_2}\left(\frac{\underline{A}(L)}{\overline{A}(L)}\right)^2 \nonumber \\ & \geq \frac{1}{1 + C'}\frac{c_1^2}{1 + 2c_2}\left(\frac{\overline{A}_\star(L)}{\underline{A}(L)}\right)^{-2}. \end{align*}
\begin{align*} \frac{1}{\overline{c}_{\lambda_T(L)}(L)}\frac{\lambda_T(L)^2 ({\min}_{a\in\mathcal E} \sum_{b\in\mathcal E} D_L(a,b)\mathcal P( b))^2}{1 + 2\lambda_T(L)\max_{a\in\mathcal E}\sum_{b\in\mathcal E} D_L(a,b)\mathcal P( b)} \nonumber & \geq \frac{1}{1 + C'}\frac{\lambda_T(L)^2\underline{A}(L)^2}{1 + 2\lambda_T(L)\overline{A}(L)}\nonumber \\ & \geq \frac{1}{1 + C'}\frac{c_1^2}{1 + 2c_2}\left(\frac{\underline{A}(L)}{\overline{A}(L)}\right)^2 \nonumber \\ & \geq \frac{1}{1 + C'}\frac{c_1^2}{1 + 2c_2}\left(\frac{\overline{A}_\star(L)}{\underline{A}(L)}\right)^{-2}. \end{align*}
The condition (6.4) then produces the result.
Lemma 6.7. If
 $\sigma_L$
is volume-linear, and
$\sigma_L$
is volume-linear, and
 \begin{align} {\mathrm{ess sup}}_{a,b\in\mathcal E} D(a,b)<\infty ,\end{align}
\begin{align} {\mathrm{ess sup}}_{a,b\in\mathcal E} D(a,b)<\infty ,\end{align}
 \begin{align} {\mathrm{ess inf}}_{a\in\mathcal E}\int_\mathcal E D(a,b)\mathcal P(\mathrm{d} b)>0, \end{align}
\begin{align} {\mathrm{ess inf}}_{a\in\mathcal E}\int_\mathcal E D(a,b)\mathcal P(\mathrm{d} b)>0, \end{align}
 \begin{align} {\mathrm{ess sup}}_{a\in\mathcal E}\sup\nolimits_{k\geq 1}\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b)>0 \end{align}
\begin{align} {\mathrm{ess sup}}_{a\in\mathcal E}\sup\nolimits_{k\geq 1}\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b)>0 \end{align}
all hold, then there exists
 $\varepsilon>0$
such that
$\varepsilon>0$
such that
 \begin{equation*} C_\Delta(L) \geq \varepsilon \end{equation*}
\begin{equation*} C_\Delta(L) \geq \varepsilon \end{equation*}
for sufficiently large L.
Proof. First observe that the choice of
 $\sigma_L=s_L$
means that
$\sigma_L=s_L$
means that
 \begin{equation*} D_L(a,b) = LD(a,b) \end{equation*}
\begin{equation*} D_L(a,b) = LD(a,b) \end{equation*}
for all
 $a,b\in\mathcal E$
and
$a,b\in\mathcal E$
and
 $L>0$
. This then means that
$L>0$
. This then means that
 \begin{align*} \textrm{ess sup}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b) &= L\textrm{ ess sup}_{a\in\mathcal E}\int D(a,b)\mathcal P(\mathrm{d} b),\\ \textrm{ess inf}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b) &= L\textrm{ ess inf}_{a\in\mathcal E}\int D(a,b)\mathcal P(\mathrm{d} b),\\ \textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b) &= L^k\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b) \qquad\text{for all } a\in\mathcal E,k\geq 1, \end{align*}
\begin{align*} \textrm{ess sup}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b) &= L\textrm{ ess sup}_{a\in\mathcal E}\int D(a,b)\mathcal P(\mathrm{d} b),\\ \textrm{ess inf}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b) &= L\textrm{ ess inf}_{a\in\mathcal E}\int D(a,b)\mathcal P(\mathrm{d} b),\\ \textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b) &= L^k\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b) \qquad\text{for all } a\in\mathcal E,k\geq 1, \end{align*}
for all
 $L>0$
.
$L>0$
.
From Lemma 4.1, we then have
 \begin{equation*} \lambda_T(L) = \lambda_{1\to 1}(L) \geq \frac{1}{\lVert {\varPhi_L}\rVert_{1\to 1}} = \frac{1}{\lVert {D_L}\rVert_{1\to 1}} = \frac{1}{L\lVert {D}\rVert_{1\to 1}}>0, \end{equation*}
\begin{equation*} \lambda_T(L) = \lambda_{1\to 1}(L) \geq \frac{1}{\lVert {\varPhi_L}\rVert_{1\to 1}} = \frac{1}{\lVert {D_L}\rVert_{1\to 1}} = \frac{1}{L\lVert {D}\rVert_{1\to 1}}>0, \end{equation*}
where this positivity follows from (6.5) implying that
 $\lVert {D}\rVert_{1\to 1}<\infty$
. Therefore, for
$\lVert {D}\rVert_{1\to 1}<\infty$
. Therefore, for
 $L\geq 1$
,
$L\geq 1$
,
 \begin{align*} &\textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\left(\frac{\lambda_T(L)}{1+\lambda_T(L)}\right)^k\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b) \\ &\qquad\geq \textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\left(\frac{1}{\lVert {D}\rVert_{1\to 1}+1}\right)^k\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b). \end{align*}
\begin{align*} &\textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\left(\frac{\lambda_T(L)}{1+\lambda_T(L)}\right)^k\textrm{ess inf}_{b\in\mathcal E}D_L^{(k)}(a,b) \\ &\qquad\geq \textrm{ess sup}_{a\in\mathcal E}\sup_{k\geq 1}\left(\frac{1}{\lVert {D}\rVert_{1\to 1}+1}\right)^k\textrm{ess inf}_{b\in\mathcal E}D^{(k)}(a,b). \end{align*}
In particular, this bound is L independent and (6.7) implies that it is strictly positive. This then means that there exists
 $c<\infty$
such that
$c<\infty$
such that
 \begin{equation*} \textrm{ess sup}_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) \leq c,\qquad \textrm{ess sup}_{a\in\mathcal E}\mathcal{J}_{\lambda_T(L),a}(L) \leq c. \end{equation*}
\begin{equation*} \textrm{ess sup}_{a\in\mathcal E}\mathcal{I}_{\lambda_T(L),a}(L) \leq c,\qquad \textrm{ess sup}_{a\in\mathcal E}\mathcal{J}_{\lambda_T(L),a}(L) \leq c. \end{equation*}
Therefore,
 \begin{equation*} \overline{c}_{\lambda_T(L)}(L) \leq 1 + cL\lambda_T(L)\textrm{ ess sup}_{a,b\in\mathcal E}D(a,b) \leq 1 + \frac{c}{\lVert {D}\rVert_{1\to 1}}\textrm{ ess sup}_{a,b\in\mathcal E}D(a,b). \end{equation*}
\begin{equation*} \overline{c}_{\lambda_T(L)}(L) \leq 1 + cL\lambda_T(L)\textrm{ ess sup}_{a,b\in\mathcal E}D(a,b) \leq 1 + \frac{c}{\lVert {D}\rVert_{1\to 1}}\textrm{ ess sup}_{a,b\in\mathcal E}D(a,b). \end{equation*}
Also recall from Lemma 6.4 that
 \begin{equation*} \lambda_T(L) \leq \frac{C_d}{\lVert {D}\rVert_{1\to 1}}. \end{equation*}
\begin{equation*} \lambda_T(L) \leq \frac{C_d}{\lVert {D}\rVert_{1\to 1}}. \end{equation*}
In summary, we have
 \begin{align*} \left(1+\lambda_T(L)\textrm{ ess sup}_{a,b,c\in\mathcal E}D_L(a,b)\mathcal{I}_{\lambda_T(L),c}(L)\right)^{-2} & \geq \left(1 + \frac{c}{\lVert {D}\rVert_{1\to 1}}\textrm{ ess sup}_{a,b\in\mathcal E}D(a,b)\right)^{-2} \\ & >0 \end{align*}
\begin{align*} \left(1+\lambda_T(L)\textrm{ ess sup}_{a,b,c\in\mathcal E}D_L(a,b)\mathcal{I}_{\lambda_T(L),c}(L)\right)^{-2} & \geq \left(1 + \frac{c}{\lVert {D}\rVert_{1\to 1}}\textrm{ ess sup}_{a,b\in\mathcal E}D(a,b)\right)^{-2} \\ & >0 \end{align*}
and
 \begin{align*} &\frac{1}{\overline{c}_{\lambda_T(L)}(L)}\frac{\lambda_T(L)^2 (\textrm{ess inf}_{a\in\mathcal E} \int D_L(a,b)\mathcal P(\mathrm{d} b))^2}{1 + 2\lambda_T(L)\textrm{ ess sup}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b)} \\ &\qquad \geq \frac{1}{(\lVert {D}\rVert_{1\to 1} + c\textrm{ess sup}_{a,b\in\mathcal E}D(a,b))(\lVert {D}\rVert_{1\to 1}+2C_d\textrm{ess sup}_{a,b\in\mathcal E}D(a,b))} \\ &\qquad >0. \end{align*}
\begin{align*} &\frac{1}{\overline{c}_{\lambda_T(L)}(L)}\frac{\lambda_T(L)^2 (\textrm{ess inf}_{a\in\mathcal E} \int D_L(a,b)\mathcal P(\mathrm{d} b))^2}{1 + 2\lambda_T(L)\textrm{ ess sup}_{a\in\mathcal E}\int D_L(a,b)\mathcal P(\mathrm{d} b)} \\ &\qquad \geq \frac{1}{(\lVert {D}\rVert_{1\to 1} + c\textrm{ess sup}_{a,b\in\mathcal E}D(a,b))(\lVert {D}\rVert_{1\to 1}+2C_d\textrm{ess sup}_{a,b\in\mathcal E}D(a,b))} \\ &\qquad >0. \end{align*}
Therefore, we have the required strictly positive and L-independent lower bound for
 $C_\Delta(L)$
.
$C_\Delta(L)$
.
7. Proofs for specific models
7.1. Boolean disc model
Proof of Corollary 2.1. For part (a), first note that we have
 \begin{equation} \lambda_{\mathrm{u}}(L) \geq \frac{1}{\lVert {\varPhi_L}\rVert_{2\to 2}} \end{equation}
\begin{equation} \lambda_{\mathrm{u}}(L) \geq \frac{1}{\lVert {\varPhi_L}\rVert_{2\to 2}} \end{equation}
through Lemmata 4.1 and 6.1. In general, we cannot directly apply Lemma 5.4 to our model, but the argument needs only a slight modification for our case. Fix
 $R\in(0,\infty)$
. Since
$R\in(0,\infty)$
. Since
 $D^{(\leq R)}_L(a,b)\leq \mathfrak{S}_{d-1}\mathbf{V}_d\left(R\right)$
for all L and all
$D^{(\leq R)}_L(a,b)\leq \mathfrak{S}_{d-1}\mathbf{V}_d\left(R\right)$
for all L and all
 $a,b\in\mathcal E$
,
$a,b\in\mathcal E$
,
 \begin{equation*} \lVert {D^{(\leq R)}_L}\rVert_{2\to 2} \leq \mathfrak{S}_{d-1}\mathbf{V}_d\left(R\right) \end{equation*}
\begin{equation*} \lVert {D^{(\leq R)}_L}\rVert_{2\to 2} \leq \mathfrak{S}_{d-1}\mathbf{V}_d\left(R\right) \end{equation*}
for all L. Now fix
 $\varepsilon>0$
such that
$\varepsilon>0$
such that
 $\mathcal P\left(\left(\varepsilon,\infty\right)\right)>0$
and consider
$\mathcal P\left(\left(\varepsilon,\infty\right)\right)>0$
and consider
 $f(a)\,:\!=\, \mathcal P\left(\left(\varepsilon,\infty\right)\right)^{-{1}/{2}}\unicode{x1D7D9}_{\left\{a>\varepsilon\right\}}$
. We have
$f(a)\,:\!=\, \mathcal P\left(\left(\varepsilon,\infty\right)\right)^{-{1}/{2}}\unicode{x1D7D9}_{\left\{a>\varepsilon\right\}}$
. We have
 $\lVert {f}\rVert_2=1$
and
$\lVert {f}\rVert_2=1$
and
 \begin{align*} \lVert {D_L}\rVert_{2\to 2}^2 \geq \lVert {D_L\,f}\rVert_2^2 &= \frac{\mathfrak{S}^2_{d-1}}{\mathcal P\left(\left(\varepsilon,\infty\right)\right)}\int_{\mathcal E}\left(\int_{\mathcal E\cap\left(\varepsilon,\infty\right)}\mathbf{V}_d\left(\sigma_L\left(a+b\right)\right)\mathcal P(\mathrm{d} a)\right)^2\mathcal P(\mathrm{d} b)\nonumber\\ &\geq \frac{\mathfrak{S}^2_{d-1}}{\mathcal P\left(\left(\varepsilon,\infty\right)\right)}\int_{\mathcal E}\mathbf{V}_d\left(\sigma_L\left(\varepsilon\right)\right)^2\mathcal P\left(\left(\varepsilon,\infty\right)\right)^2\mathcal P(\mathrm{d} b)\nonumber\\ & = \mathfrak{S}^2_{d-1}\mathcal P\left(\left(\varepsilon,\infty\right)\right)\mathbf{V}_d \left(\sigma_L\left(\varepsilon\right)\right)^2 \\ &\to\infty \end{align*}
\begin{align*} \lVert {D_L}\rVert_{2\to 2}^2 \geq \lVert {D_L\,f}\rVert_2^2 &= \frac{\mathfrak{S}^2_{d-1}}{\mathcal P\left(\left(\varepsilon,\infty\right)\right)}\int_{\mathcal E}\left(\int_{\mathcal E\cap\left(\varepsilon,\infty\right)}\mathbf{V}_d\left(\sigma_L\left(a+b\right)\right)\mathcal P(\mathrm{d} a)\right)^2\mathcal P(\mathrm{d} b)\nonumber\\ &\geq \frac{\mathfrak{S}^2_{d-1}}{\mathcal P\left(\left(\varepsilon,\infty\right)\right)}\int_{\mathcal E}\mathbf{V}_d\left(\sigma_L\left(\varepsilon\right)\right)^2\mathcal P\left(\left(\varepsilon,\infty\right)\right)^2\mathcal P(\mathrm{d} b)\nonumber\\ & = \mathfrak{S}^2_{d-1}\mathcal P\left(\left(\varepsilon,\infty\right)\right)\mathbf{V}_d \left(\sigma_L\left(\varepsilon\right)\right)^2 \\ &\to\infty \end{align*}
as
 $L\to\infty$
. Therefore,
$L\to\infty$
. Therefore,
 $\lVert {D^{(\leq R)}_L}\rVert_{2\to 2} = o\left(\lVert {D_L}\rVert_{2\to 2}\right)$
as
$\lVert {D^{(\leq R)}_L}\rVert_{2\to 2} = o\left(\lVert {D_L}\rVert_{2\to 2}\right)$
as
 $L\to\infty$
and the argument in Lemma 5.4 proceeds in the same way to show that
$L\to\infty$
and the argument in Lemma 5.4 proceeds in the same way to show that
 \begin{equation} \lim_{L\to\infty}\frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{\lVert {D_L}\rVert_{2\to 2}} = 0. \end{equation}
\begin{equation} \lim_{L\to\infty}\frac{\lVert {\varPhi_L}\rVert_{2\to 2}}{\lVert {D_L}\rVert_{2\to 2}} = 0. \end{equation}
In general, we also cannot directly apply Lemma 6.3 or Lemma 6.4. However, we can bound
 $\lambda_{\mathrm{c}}(L)$
for our model by the critical intensity for another model that we can apply Lemma 6.3 for. Recall that
$\lambda_{\mathrm{c}}(L)$
for our model by the critical intensity for another model that we can apply Lemma 6.3 for. Recall that
 $R^*\,:\!=\, \textrm{ess sup }\mathcal E\in(0,\infty)$
, and let
$R^*\,:\!=\, \textrm{ess sup }\mathcal E\in(0,\infty)$
, and let
 $\lambda^*_{\mathrm{c}}(L)$
denote the percolation critical intensity for the same scaled Boolean disc model but with the finite mark space
$\lambda^*_{\mathrm{c}}(L)$
denote the percolation critical intensity for the same scaled Boolean disc model but with the finite mark space
 $\mathcal E^*=\left\{0,R^*\right\}$
and
$\mathcal E^*=\left\{0,R^*\right\}$
and
 $\mathcal P^*\left(\left\{0\right\}\right) = \mathcal P\left(\left(0,R^*\right)\right)$
and
$\mathcal P^*\left(\left\{0\right\}\right) = \mathcal P\left(\left(0,R^*\right)\right)$
and
 $\mathcal P^*\left(\left\{R^*\right\}\right) = \mathcal P\left(\left\{R^*\right\}\right)$
. This can be coupled to the original scaled Boolean disc model in such a way that the graph resulting from the new model is a sub-graph of the graph resulting from the original model. Therefore,
$\mathcal P^*\left(\left\{R^*\right\}\right) = \mathcal P\left(\left\{R^*\right\}\right)$
. This can be coupled to the original scaled Boolean disc model in such a way that the graph resulting from the new model is a sub-graph of the graph resulting from the original model. Therefore,
 \begin{equation*} \lambda^*_{\mathrm{c}}\left(L\right) \geq \lambda_{\mathrm{c}}\left(L\right). \end{equation*}
\begin{equation*} \lambda^*_{\mathrm{c}}\left(L\right) \geq \lambda_{\mathrm{c}}\left(L\right). \end{equation*}
We can now apply Lemma 6.3 to this new model. From the equivalence of norms on finite dimensional spaces,
 \begin{equation*} \lVert {D^*_L}\rVert_{2\to 2} \asymp \mathbf{V}_d(\sigma_L(2R^*)) \quad\text{as }L\to \infty. \end{equation*}
\begin{equation*} \lVert {D^*_L}\rVert_{2\to 2} \asymp \mathbf{V}_d(\sigma_L(2R^*)) \quad\text{as }L\to \infty. \end{equation*}
On the other hand, bounding by the Hilbert-Schmidt norm gives
 \begin{align*} \lVert {D_L}\rVert_{2\to 2} \leq \left\lVert D_L\right\rVert_\textrm{HS}& = \mathfrak{S}_{d-1}\left(\int_{\left(0,R^*\right]}\int_{\left(0,R^*\right]}\mathbf{V}_d\left(\sigma_L\left(a+b\right)\right)^2\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\right)^{{1}/{2}} \\ &\leq \mathfrak{S}_{d-1}\mathbf{V}_d(\sigma_L(2R^*)). \end{align*}
\begin{align*} \lVert {D_L}\rVert_{2\to 2} \leq \left\lVert D_L\right\rVert_\textrm{HS}& = \mathfrak{S}_{d-1}\left(\int_{\left(0,R^*\right]}\int_{\left(0,R^*\right]}\mathbf{V}_d\left(\sigma_L\left(a+b\right)\right)^2\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\right)^{{1}/{2}} \\ &\leq \mathfrak{S}_{d-1}\mathbf{V}_d(\sigma_L(2R^*)). \end{align*}
Therefore, there exists a constant
 $C>0$
such that, for sufficiently large L,
$C>0$
such that, for sufficiently large L,
 \begin{equation} \lambda_{\mathrm{c}}(L) \leq \frac{C}{\lVert {D_L}\rVert_{2\to 2}}. \end{equation}
\begin{equation} \lambda_{\mathrm{c}}(L) \leq \frac{C}{\lVert {D_L}\rVert_{2\to 2}}. \end{equation}
Taken together, (7.1), (7.2), and (7.3) are enough to prove part (a).
To prove part (b), directly use Theorem 2.1 with Assumption 2. This requires that the
 $L^2(\mathcal E)\to L^2(\mathcal E)$
operator norm of the operator constructed from the function
$L^2(\mathcal E)\to L^2(\mathcal E)$
operator norm of the operator constructed from the function
 \begin{equation*} (a,b)\mapsto \int^{a+b}_0r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r \end{equation*}
\begin{equation*} (a,b)\mapsto \int^{a+b}_0r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r \end{equation*}
is finite. Let us denote this operator by
 $\mathcal B$
(for ‘Boolean’). We can bound the
$\mathcal B$
(for ‘Boolean’). We can bound the
 $L^2(\mathcal E)\to L^2(\mathcal E)$
operator norm by the Hilbert–Schmidt norm:
$L^2(\mathcal E)\to L^2(\mathcal E)$
operator norm by the Hilbert–Schmidt norm:
 \begin{equation*} \lVert {\mathcal B}\rVert_{2\to 2} \leq \left\lVert\mathcal B\right\rVert_\textrm{HS} = \left(\int^\infty_0\int^\infty_0\left(\int^{a+b}_0r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r\right)^2\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\right)^{{1}/{2}}. \end{equation*}
\begin{equation*} \lVert {\mathcal B}\rVert_{2\to 2} \leq \left\lVert\mathcal B\right\rVert_\textrm{HS} = \left(\int^\infty_0\int^\infty_0\left(\int^{a+b}_0r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r\right)^2\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\right)^{{1}/{2}}. \end{equation*}
There exists a constant
 $C_d<\infty$
such that
$C_d<\infty$
such that
 \begin{align*} \int^{a+b}_0r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r &= \frac{4}{(d-1)^2}\left(1 - \left(1-\frac{1}{2}(d-1)\left(a+b\right)\mathrm{e}^{ (d-1)(a+b)/2}\right)\right) \\ &\leq C_d\left((1\vee a)+(1\vee b)\right)\mathrm{e}^{(d-1)(a+b)/2}, \end{align*}
\begin{align*} \int^{a+b}_0r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r &= \frac{4}{(d-1)^2}\left(1 - \left(1-\frac{1}{2}(d-1)\left(a+b\right)\mathrm{e}^{ (d-1)(a+b)/2}\right)\right) \\ &\leq C_d\left((1\vee a)+(1\vee b)\right)\mathrm{e}^{(d-1)(a+b)/2}, \end{align*}
so that
 \begin{align*} \lVert {\mathcal B}\rVert_{2\to 2}^2 &\leq C_d^2\int^\infty_0\int^\infty_0 \left((1\vee a)+(1\vee b)\right)^2\mathrm{e}^{(d-1)\left(a+b\right)}\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\nonumber\\ & = C_d^2\int^\infty_0\int^\infty_0 ((1\vee a)^2+(1\vee b)^2)\mathrm{e}^{(d-1)\left(a+b\right)}\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b) \nonumber\\ & \quad + 2C_d^2 \int^\infty_0\int^\infty_0 (1\vee a)(1\vee b)\mathrm{e}^{(d-1)\left(a+b\right)}\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\nonumber\\ & = 2C_d^2\left(\int^\infty_0\mathrm{e}^{(d-1)b}\mathcal P(\mathrm{d} b)\int^\infty_0(1\vee a)^2\mathrm{e}^{(d-1)a}\mathcal P(\mathrm{d} a)\right.\nonumber\\ &\quad + \left.\left(\int^\infty_0(1\vee a)\mathrm{e}^{(d-1)a}\mathcal P(\mathrm{d} a)\right)^2\right)\nonumber\\ & \leq \left(2C_d \int^\infty_0(1\vee r^2)\mathrm{e}^{(d-1)r}\mathcal P(\mathrm{d} r)\right)^2. \end{align*}
\begin{align*} \lVert {\mathcal B}\rVert_{2\to 2}^2 &\leq C_d^2\int^\infty_0\int^\infty_0 \left((1\vee a)+(1\vee b)\right)^2\mathrm{e}^{(d-1)\left(a+b\right)}\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\nonumber\\ & = C_d^2\int^\infty_0\int^\infty_0 ((1\vee a)^2+(1\vee b)^2)\mathrm{e}^{(d-1)\left(a+b\right)}\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b) \nonumber\\ & \quad + 2C_d^2 \int^\infty_0\int^\infty_0 (1\vee a)(1\vee b)\mathrm{e}^{(d-1)\left(a+b\right)}\mathcal P(\mathrm{d} a)\mathcal P(\mathrm{d} b)\nonumber\\ & = 2C_d^2\left(\int^\infty_0\mathrm{e}^{(d-1)b}\mathcal P(\mathrm{d} b)\int^\infty_0(1\vee a)^2\mathrm{e}^{(d-1)a}\mathcal P(\mathrm{d} a)\right.\nonumber\\ &\quad + \left.\left(\int^\infty_0(1\vee a)\mathrm{e}^{(d-1)a}\mathcal P(\mathrm{d} a)\right)^2\right)\nonumber\\ & \leq \left(2C_d \int^\infty_0(1\vee r^2)\mathrm{e}^{(d-1)r}\mathcal P(\mathrm{d} r)\right)^2. \end{align*}
This bound is finite precisely when
 $\int^\infty_0r^2\mathrm{e}^{(d-1)r}\mathcal P(\mathrm{d} r)<\infty$
, and therefore, the condition (2.17) is sufficient to apply Theorem 2.1.
$\int^\infty_0r^2\mathrm{e}^{(d-1)r}\mathcal P(\mathrm{d} r)<\infty$
, and therefore, the condition (2.17) is sufficient to apply Theorem 2.1.
For part (c), let us first consider the
 $L=1$
version. This version still has the interpretation in which a vertex with mark a is assigned a ball of radius a that is centred on it, and two vertices are adjacent in the RCM if their balls overlap. For the associated model on
$L=1$
version. This version still has the interpretation in which a vertex with mark a is assigned a ball of radius a that is centred on it, and two vertices are adjacent in the RCM if their balls overlap. For the associated model on
 $\mathbb R^d$
, Hall [Reference Hall19] gives an argument that every point in
$\mathbb R^d$
, Hall [Reference Hall19] gives an argument that every point in
 $\mathbb R^d$
is covered by a ball if and only if the expected size of the random ball is infinite. The same argument applies for the
$\mathbb R^d$
is covered by a ball if and only if the expected size of the random ball is infinite. The same argument applies for the
 ${\mathbb{H}^d}$
models when
${\mathbb{H}^d}$
models when
 $L=1$
, and the expected size of the balls is finite exactly when (2.17) holds. Therefore, if this expectation is infinite, the union of all the balls almost surely equals
$L=1$
, and the expected size of the balls is finite exactly when (2.17) holds. Therefore, if this expectation is infinite, the union of all the balls almost surely equals
 ${\mathbb{H}^d}$
, and the connectedness and infinite-ness of this set then implies that
${\mathbb{H}^d}$
, and the connectedness and infinite-ness of this set then implies that
 $\lambda_{\mathrm{u}}(1)=\lambda_{\mathrm{c}}(1)=0$
. For
$\lambda_{\mathrm{u}}(1)=\lambda_{\mathrm{c}}(1)=0$
. For
 $L>1$
, observe that this family of RCMs is monotone: there is a coupling of the
$L>1$
, observe that this family of RCMs is monotone: there is a coupling of the
 $L=1$
model with the
$L=1$
model with the
 $L>1$
model such that if an edge exists in the
$L>1$
model such that if an edge exists in the
 $L=1$
model then it exists in the
$L=1$
model then it exists in the
 $L>1$
model. Therefore, if almost every vertex is in the same cluster in the
$L>1$
model. Therefore, if almost every vertex is in the same cluster in the
 $L=1$
model then the same is true for the
$L=1$
model then the same is true for the
 $L>1$
model.
$L>1$
model.
For part (d), use Theorem 2.2 with Assumption 4. The form of
 $\varphi$
and
$\varphi$
and
 $\mathcal P\left(\left\{0\right\}\right)<1$
imply that (2.15) and (2.16) hold, and it is simple to show that the boundedness of the support of
$\mathcal P\left(\left\{0\right\}\right)<1$
imply that (2.15) and (2.16) hold, and it is simple to show that the boundedness of the support of
 $\mathcal P$
implies that condition (2.14) holds.
$\mathcal P$
implies that condition (2.14) holds.
7.2. Weight-dependent hyperbolic RCMs
Proof of Corollary 2.2. First we aim to use Theorem 2.1 with Assumption 2. The main observation is that
 \begin{equation} \int^\infty_0\varphi(r;\,a,b) r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r = \kappa(a,b)\int^\infty_0\rho(r)r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r. \end{equation}
\begin{equation} \int^\infty_0\varphi(r;\,a,b) r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r = \kappa(a,b)\int^\infty_0\rho(r)r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r. \end{equation}
Therefore, condition (2.25) ensures that
 $\int^\infty_0\varphi(r;\,a,b) r\exp(\frac{1}{2}(d-1)r)\mathrm{d} r<\infty$
for
$\int^\infty_0\varphi(r;\,a,b) r\exp(\frac{1}{2}(d-1)r)\mathrm{d} r<\infty$
for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
, and (2.9) becomes the requirement that
$a,b\in\mathcal E$
, and (2.9) becomes the requirement that
 \begin{equation*} \lVert {\mathcal{K}}\rVert_{2\to 2}\int^\infty_0\rho(r)r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r<\infty. \end{equation*}
\begin{equation*} \lVert {\mathcal{K}}\rVert_{2\to 2}\int^\infty_0\rho(r)r\exp\left(\frac{1}{2}(d-1)r\right)\mathrm{d} r<\infty. \end{equation*}
This is then clearly satisfied if
 $\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
.
$\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
.
Proof of Corollary
2.3. This follows directly from Corollary 2.2 once one has evaluated
 $\lVert {\mathcal{K}}\rVert_{2\to 2}$
for each model. These are indeed evaluated in Lemmata 7.1–7.4 below.
$\lVert {\mathcal{K}}\rVert_{2\to 2}$
for each model. These are indeed evaluated in Lemmata 7.1–7.4 below.
Lemma 7.1. We have
 \begin{equation*} \lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2} = \begin{cases} \displaystyle\frac{1}{1-2\zeta} &: \zeta\in\big(0,\frac{1}{2}\big),\\ \infty &: \zeta\geq \frac{1}{2}. \end{cases}\end{equation*}
\begin{equation*} \lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2} = \begin{cases} \displaystyle\frac{1}{1-2\zeta} &: \zeta\in\big(0,\frac{1}{2}\big),\\ \infty &: \zeta\geq \frac{1}{2}. \end{cases}\end{equation*}
Proof. We first consider
 $\zeta<\frac{1}{2}$
and evaluate
$\zeta<\frac{1}{2}$
and evaluate
 $\lVert\mathcal{K}^{\mathrm{prod}}\rVert_\textrm{HS}$
. We find that
$\lVert\mathcal{K}^{\mathrm{prod}}\rVert_\textrm{HS}$
. We find that
 \begin{equation*} \big\lVert\mathcal{K}^{\mathrm{prod}}\big\rVert_\textrm{HS} = \left(\int^1_0 \int^1_0 a^{-2\zeta} b^{-2\zeta} \mathrm{d} a\mathrm{d} b\right)^{{1}/{2}} = \int^1_0 a^{-2\zeta}\mathrm{d} a = \frac{1}{1-2\zeta}.\end{equation*}
\begin{equation*} \big\lVert\mathcal{K}^{\mathrm{prod}}\big\rVert_\textrm{HS} = \left(\int^1_0 \int^1_0 a^{-2\zeta} b^{-2\zeta} \mathrm{d} a\mathrm{d} b\right)^{{1}/{2}} = \int^1_0 a^{-2\zeta}\mathrm{d} a = \frac{1}{1-2\zeta}.\end{equation*}
Therefore,
 $\lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2}\leq {1}/{(1-2\zeta)}$
for
$\lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2}\leq {1}/{(1-2\zeta)}$
for
 $\zeta<\frac{1}{2}$
. Now let us consider the normalized
$\zeta<\frac{1}{2}$
. Now let us consider the normalized
 $L^2$
function
$L^2$
function
 \begin{equation*} f_1(a) \,:\!=\, \left(1-2\zeta\right)^{{1}/{2}}a^{-\zeta}.\end{equation*}
\begin{equation*} f_1(a) \,:\!=\, \left(1-2\zeta\right)^{{1}/{2}}a^{-\zeta}.\end{equation*}
Then
 \begin{equation*} \big(\mathcal{K}^{\mathrm{prod}}f_1\big)(a) = \frac{1}{\left(1-2\zeta\right)^{{1}/{2}}}a^{-\zeta}\end{equation*}
\begin{equation*} \big(\mathcal{K}^{\mathrm{prod}}f_1\big)(a) = \frac{1}{\left(1-2\zeta\right)^{{1}/{2}}}a^{-\zeta}\end{equation*}
and
 \begin{equation*} \lVert {\mathcal{K}^{\mathrm{prod}}f_1}\rVert_2 = \frac{1}{1-2\zeta}.\end{equation*}
\begin{equation*} \lVert {\mathcal{K}^{\mathrm{prod}}f_1}\rVert_2 = \frac{1}{1-2\zeta}.\end{equation*}
Therefore,
 $\lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2}= {1}/{(1-2\zeta)}$
for
$\lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2}= {1}/{(1-2\zeta)}$
for
 $\zeta<\frac{1}{2}$
.
$\zeta<\frac{1}{2}$
.
For
 $\zeta\geq \frac{1}{2}$
, let us consider
$\zeta\geq \frac{1}{2}$
, let us consider
 $f_2\equiv 1$
. It is clear that
$f_2\equiv 1$
. It is clear that
 $f_2\in L^2$
with
$f_2\in L^2$
with
 $\lVert {f_2}\rVert_2=1$
. We then find that
$\lVert {f_2}\rVert_2=1$
. We then find that
 \begin{equation*} \big(\mathcal{K}^{\mathrm{prod}}f_2\big)(a) = \frac{1}{1-\zeta}a^{-\zeta}.\end{equation*}
\begin{equation*} \big(\mathcal{K}^{\mathrm{prod}}f_2\big)(a) = \frac{1}{1-\zeta}a^{-\zeta}.\end{equation*}
Note that, for
 $\zeta\geq \frac{1}{2}$
,
$\zeta\geq \frac{1}{2}$
,
 $\lVert {\mathcal{K}^{\mathrm{prod}}f_2}\rVert_2=\infty$
and
$\lVert {\mathcal{K}^{\mathrm{prod}}f_2}\rVert_2=\infty$
and
 $\mathcal{K}^{\mathrm{prod}}f_2\not\in L^2$
. Therefore,
$\mathcal{K}^{\mathrm{prod}}f_2\not\in L^2$
. Therefore,
 $\lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2}= \infty$
for
$\lVert {\mathcal{K}^{\mathrm{prod}}}\rVert_{2\to 2}= \infty$
for
 $\zeta\geq\frac{1}{2}$
.
$\zeta\geq\frac{1}{2}$
.
Lemma 7.2. We have
 \begin{equation*} \lVert {\mathcal{K}^{\mathrm{strong}}}\rVert_{2\to 2}<\infty \iff \zeta<\tfrac{1}{2}. \end{equation*}
\begin{equation*} \lVert {\mathcal{K}^{\mathrm{strong}}}\rVert_{2\to 2}<\infty \iff \zeta<\tfrac{1}{2}. \end{equation*}
Proof. For
 $\zeta<\frac{1}{2}$
, we first show that, by the symmetry of the kernel,
$\zeta<\frac{1}{2}$
, we first show that, by the symmetry of the kernel,
 \begin{equation*} \lVert\mathcal{K}^{\mathrm{strong}}\rVert_\textrm{HS}^2 = 2\int^1_0\left(\int^b_0 a^{-2\zeta} \mathrm{d} a\right)\mathrm{d} b = \frac{1}{\left(1-2\zeta\right)\left(1-\zeta\right)}. \end{equation*}
\begin{equation*} \lVert\mathcal{K}^{\mathrm{strong}}\rVert_\textrm{HS}^2 = 2\int^1_0\left(\int^b_0 a^{-2\zeta} \mathrm{d} a\right)\mathrm{d} b = \frac{1}{\left(1-2\zeta\right)\left(1-\zeta\right)}. \end{equation*}
This then bounds
 $\lVert {\mathcal{K}^{\mathrm{strong}}}\rVert_{2\to 2}<\infty$
.
$\lVert {\mathcal{K}^{\mathrm{strong}}}\rVert_{2\to 2}<\infty$
.
For
 $\zeta\geq \frac{1}{2}$
, let us consider
$\zeta\geq \frac{1}{2}$
, let us consider
 $f\equiv 1$
. We find that, for
$f\equiv 1$
. We find that, for
 $a\in(0,1)$
,
$a\in(0,1)$
,
 \begin{equation*} (\mathcal{K}^{\mathrm{strong}}f)(a) = a^{-\zeta}\left(1-a\right) + \int^a_0b^{-\zeta}\mathrm{d} t = \begin{cases} \displaystyle a^{-\zeta}\left(1-a\right) + \frac{1}{1-\zeta}a^{1-\zeta} &\colon \zeta<1,\\ \infty &\colon \zeta\geq 1. \end{cases} \end{equation*}
\begin{equation*} (\mathcal{K}^{\mathrm{strong}}f)(a) = a^{-\zeta}\left(1-a\right) + \int^a_0b^{-\zeta}\mathrm{d} t = \begin{cases} \displaystyle a^{-\zeta}\left(1-a\right) + \frac{1}{1-\zeta}a^{1-\zeta} &\colon \zeta<1,\\ \infty &\colon \zeta\geq 1. \end{cases} \end{equation*}
Clearly
 $\lVert {\mathcal{K}^{\mathrm{strong}}f}\rVert_2=\infty$
if
$\lVert {\mathcal{K}^{\mathrm{strong}}f}\rVert_2=\infty$
if
 $\zeta\geq \frac{1}{2}$
, and therefore,
$\zeta\geq \frac{1}{2}$
, and therefore,
 $\lVert {\mathcal{K}^{\mathrm{strong}}}\rVert_{2\to 2}=\infty$
.
$\lVert {\mathcal{K}^{\mathrm{strong}}}\rVert_{2\to 2}=\infty$
.
While the product and strong (and therefore sum) kernels do indeed have parameter regimes for which
 $\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
, we can now show that the weak and preferential attachment kernels do not, and therefore, our results do not apply to them.
$\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
, we can now show that the weak and preferential attachment kernels do not, and therefore, our results do not apply to them.
Lemma 7.3. For all
 $\zeta>0$
,
$\zeta>0$
,
 $\lVert {\mathcal{K}^{\mathrm{weak}}}\rVert_{2\to 2} = \infty$
.
$\lVert {\mathcal{K}^{\mathrm{weak}}}\rVert_{2\to 2} = \infty$
.
Proof. For
 $\zeta>0$
, let us consider
$\zeta>0$
, let us consider
 $f(a)= a^{\zeta -{1}/{2}}$
. We have
$f(a)= a^{\zeta -{1}/{2}}$
. We have
 $f\in L^2$
since
$f\in L^2$
since
 $\lVert {f}\rVert_2 = {1}/{\sqrt{2\zeta}}<\infty$
. Now, for
$\lVert {f}\rVert_2 = {1}/{\sqrt{2\zeta}}<\infty$
. Now, for
 $a\in(0,1)$
,
$a\in(0,1)$
,
 \begin{equation*} \big(\mathcal{K}^{\mathrm{weak}}f\big)(a) = a^{-1-\zeta}\int^a_0b^{\zeta -{1}/{2}}\mathrm{d} b + \int^1_ab^{-{3}/{2}}\mathrm{d} b = \frac{1}{\zeta + {1}/{2}}a^{-{1}/{2}} + 2\big(a^{-{1}/{2}}-1\big). \end{equation*}
\begin{equation*} \big(\mathcal{K}^{\mathrm{weak}}f\big)(a) = a^{-1-\zeta}\int^a_0b^{\zeta -{1}/{2}}\mathrm{d} b + \int^1_ab^{-{3}/{2}}\mathrm{d} b = \frac{1}{\zeta + {1}/{2}}a^{-{1}/{2}} + 2\big(a^{-{1}/{2}}-1\big). \end{equation*}
Therefore,
 $\lVert {\mathcal{K}^{\mathrm{weak}}f}\rVert_2=\infty$
and
$\lVert {\mathcal{K}^{\mathrm{weak}}f}\rVert_2=\infty$
and
 $\lVert {\mathcal{K}^{\mathrm{weak}}}\rVert_{2\to 2} = \infty$
.
$\lVert {\mathcal{K}^{\mathrm{weak}}}\rVert_{2\to 2} = \infty$
.
Lemma 7.4. For all
 $\zeta>0$
,
$\zeta>0$
,
 $\lVert {\mathcal{K}^{\mathrm{pa}}}\rVert_{2\to 2} = \infty$
.
$\lVert {\mathcal{K}^{\mathrm{pa}}}\rVert_{2\to 2} = \infty$
.
Proof. First we consider
 $\zeta<\frac{1}{2}$
and the family of functions
$\zeta<\frac{1}{2}$
and the family of functions
 $f_\varepsilon(a) = a^{\zeta-1}\unicode{x1D7D9}_{a>\varepsilon}$
for
$f_\varepsilon(a) = a^{\zeta-1}\unicode{x1D7D9}_{a>\varepsilon}$
for
 $\varepsilon>0$
. We have
$\varepsilon>0$
. We have
 \begin{equation*} \lVert {f_\varepsilon}\rVert^2_2 = \int^1_\varepsilon a^{2\zeta-2}\mathrm{d} a = \frac{1}{1-2\zeta}\big(\varepsilon^{2\zeta-1}-1\big). \end{equation*}
\begin{equation*} \lVert {f_\varepsilon}\rVert^2_2 = \int^1_\varepsilon a^{2\zeta-2}\mathrm{d} a = \frac{1}{1-2\zeta}\big(\varepsilon^{2\zeta-1}-1\big). \end{equation*}
Note
 $\lVert {f_\varepsilon}\rVert_2<\infty$
for all
$\lVert {f_\varepsilon}\rVert_2<\infty$
for all
 $\varepsilon>0$
, but that
$\varepsilon>0$
, but that
 $\lVert {f_\varepsilon}\rVert_2\to\infty$
as
$\lVert {f_\varepsilon}\rVert_2\to\infty$
as
 $\varepsilon\to 0$
.
$\varepsilon\to 0$
.
Now, for
 $a\leq\varepsilon$
, we have
$a\leq\varepsilon$
, we have
 \begin{equation*} (\mathcal{K}^{\mathrm{pa}}f_\varepsilon)(a) = \frac{a^{-\zeta}}{1-2\zeta}\big(\varepsilon^{2\zeta-1}-1\big) \end{equation*}
\begin{equation*} (\mathcal{K}^{\mathrm{pa}}f_\varepsilon)(a) = \frac{a^{-\zeta}}{1-2\zeta}\big(\varepsilon^{2\zeta-1}-1\big) \end{equation*}
and, for
 $a>\varepsilon$
, we have
$a>\varepsilon$
, we have
 \begin{equation*} (\mathcal{K}^{\mathrm{pa}}f_\varepsilon)(a) = \frac{a^{-\zeta}}{1-2\zeta}\big(a^{2\zeta-1}-1\big) + a^{\zeta-1}\log\frac{a}{\varepsilon}. \end{equation*}
\begin{equation*} (\mathcal{K}^{\mathrm{pa}}f_\varepsilon)(a) = \frac{a^{-\zeta}}{1-2\zeta}\big(a^{2\zeta-1}-1\big) + a^{\zeta-1}\log\frac{a}{\varepsilon}. \end{equation*}
Since
 $\zeta<\frac{1}{2}$
, we can identify the dominant term and find that
$\zeta<\frac{1}{2}$
, we can identify the dominant term and find that
 \begin{equation*} \lVert {\mathcal{K}^{\mathrm{pa}}f_\varepsilon}\rVert^2_2 \asymp \int^1_\varepsilon a^{2\zeta-2}(\log a)^2\mathrm{d} a \quad\text{as } \varepsilon\to 0. \end{equation*}
\begin{equation*} \lVert {\mathcal{K}^{\mathrm{pa}}f_\varepsilon}\rVert^2_2 \asymp \int^1_\varepsilon a^{2\zeta-2}(\log a)^2\mathrm{d} a \quad\text{as } \varepsilon\to 0. \end{equation*}
Since
 $(\log a)^2\to\infty$
as
$(\log a)^2\to\infty$
as
 $a\to 0$
,
$a\to 0$
,
 \begin{equation*} \lVert {\mathcal{K}^{\mathrm{pa}}f_\varepsilon}\rVert_2 \gg \lVert {f_\varepsilon}\rVert_2 \quad\text{as }\varepsilon\to 0. \end{equation*}
\begin{equation*} \lVert {\mathcal{K}^{\mathrm{pa}}f_\varepsilon}\rVert_2 \gg \lVert {f_\varepsilon}\rVert_2 \quad\text{as }\varepsilon\to 0. \end{equation*}
Therefore,
 $\lVert {\mathcal{K}^{\mathrm{pa}}}\rVert_{2\to 2}=\infty$
for
$\lVert {\mathcal{K}^{\mathrm{pa}}}\rVert_{2\to 2}=\infty$
for
 $\zeta<\frac{1}{2}$
.
$\zeta<\frac{1}{2}$
.
For
 $\zeta\geq \frac{1}{2}$
, consider
$\zeta\geq \frac{1}{2}$
, consider
 $f\equiv 1$
. Then
$f\equiv 1$
. Then
 \begin{equation*} (\mathcal{K}^{\mathrm{pa}}f)(a) = a^{-\zeta}\int^1_a b^{\zeta-1}\mathrm{d} b + a^{\zeta-1}\int^a_0 b^{-\zeta}\mathrm{d} b = \begin{cases} \displaystyle \frac{1}{\zeta}a^{-\zeta} - \frac{1}{\zeta} + \frac{1}{1-\zeta} &\colon \zeta<1,\\ \infty &\colon \zeta\geq 1. \end{cases} \end{equation*}
\begin{equation*} (\mathcal{K}^{\mathrm{pa}}f)(a) = a^{-\zeta}\int^1_a b^{\zeta-1}\mathrm{d} b + a^{\zeta-1}\int^a_0 b^{-\zeta}\mathrm{d} b = \begin{cases} \displaystyle \frac{1}{\zeta}a^{-\zeta} - \frac{1}{\zeta} + \frac{1}{1-\zeta} &\colon \zeta<1,\\ \infty &\colon \zeta\geq 1. \end{cases} \end{equation*}
Therefore,
 $\lVert {\mathcal{K}^{\mathrm{pa}}f}\rVert_2=\infty$
for
$\lVert {\mathcal{K}^{\mathrm{pa}}f}\rVert_2=\infty$
for
 $\zeta\geq \frac{1}{2}$
, and
$\zeta\geq \frac{1}{2}$
, and
 $\lVert {\mathcal{K}^{\mathrm{pa}}}\rVert_{2\to 2}=\infty$
.
$\lVert {\mathcal{K}^{\mathrm{pa}}}\rVert_{2\to 2}=\infty$
.
Proof of Proposition 2.1. First note that by Mecke’s formula, the expected degree of a vertex with mark a is given by
 \begin{align*} &\lambda\mathfrak{S}_{d-1}\int^1_0\left(\int^\infty_0\rho\left(s^{-1}_{\kappa(a,b)}(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r\right) \mathrm{d} b \\ &\qquad= \lambda\mathfrak{S}_{d-1} \int^1_0 \kappa(a,b)\left(\int^\infty_0\rho(r)({\sinh}\, r)^{d-1}\mathrm{d} r \right)\mathrm{d} b. \end{align*}
\begin{align*} &\lambda\mathfrak{S}_{d-1}\int^1_0\left(\int^\infty_0\rho\left(s^{-1}_{\kappa(a,b)}(r)\right)({\sinh}\, r)^{d-1}\mathrm{d} r\right) \mathrm{d} b \\ &\qquad= \lambda\mathfrak{S}_{d-1} \int^1_0 \kappa(a,b)\left(\int^\infty_0\rho(r)({\sinh}\, r)^{d-1}\mathrm{d} r \right)\mathrm{d} b. \end{align*}
Therefore, since
 $\kappa(a,b)>0$
for a positive measure of
$\kappa(a,b)>0$
for a positive measure of
 $(a,b)\in(0,1)^2$
, the expected degree of a vertex with mark a equals
$(a,b)\in(0,1)^2$
, the expected degree of a vertex with mark a equals
 $\infty$
for a positive measure of a. In particular, this occurs for any
$\infty$
for a positive measure of a. In particular, this occurs for any
 $\lambda>0$
. Since the expected cluster size is bounded below by the expected degree,
$\lambda>0$
. Since the expected cluster size is bounded below by the expected degree,
 $\theta_\lambda(a)=1$
for
$\theta_\lambda(a)=1$
for
 $\lambda>0$
and a positive measure of a, and
$\lambda>0$
and a positive measure of a, and
 $\lambda_{\mathrm{c}}=0$
.
$\lambda_{\mathrm{c}}=0$
.
To show that
 $\lambda_{\mathrm{u}}>0$
, we utilize Lemma 6.1 to show that
$\lambda_{\mathrm{u}}>0$
, we utilize Lemma 6.1 to show that
 $\lambda_{\mathrm{u}}\geq \lambda_{2\to 2}$
and Lemma 4.1 to show that
$\lambda_{\mathrm{u}}\geq \lambda_{2\to 2}$
and Lemma 4.1 to show that
 $\lambda_{2\to 2}\geq {1}/{\lVert {\varPhi}\rVert_{2\to 2}}$
. Then the observation (7.4) means that (2.27) implies that
$\lambda_{2\to 2}\geq {1}/{\lVert {\varPhi}\rVert_{2\to 2}}$
. Then the observation (7.4) means that (2.27) implies that
 \begin{equation*} \int^\infty_0\varphi(r;\,a,b) Q_d(r)\exp((d-1)r)\mathrm{d} r<\infty \end{equation*}
\begin{equation*} \int^\infty_0\varphi(r;\,a,b) Q_d(r)\exp((d-1)r)\mathrm{d} r<\infty \end{equation*}
for
 $\mathcal P$
-almost every
$\mathcal P$
-almost every
 $a,b\in\mathcal E$
, and Lemma 5.3 shows that
$a,b\in\mathcal E$
, and Lemma 5.3 shows that
 $\lVert {\varPhi}\rVert_{2\to 2} = \lVert {\widetilde{\varPhi}(0)}\rVert_{2\to 2}$
if the latter is finite. Since
$\lVert {\varPhi}\rVert_{2\to 2} = \lVert {\widetilde{\varPhi}(0)}\rVert_{2\to 2}$
if the latter is finite. Since
 $\int^\infty_0\rho(r) Q_d(r)({\sinh}\, r)^{d-1}\mathrm{d} r<\infty$
if (2.27) holds,
$\int^\infty_0\rho(r) Q_d(r)({\sinh}\, r)^{d-1}\mathrm{d} r<\infty$
if (2.27) holds,
 $\lVert {\widetilde{\varPhi}(0)}\rVert_{2\to 2}<\infty$
if
$\lVert {\widetilde{\varPhi}(0)}\rVert_{2\to 2}<\infty$
if
 $\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
. Therefore,
$\lVert {\mathcal{K}}\rVert_{2\to 2}<\infty$
. Therefore,
 $\lambda_{2\to 2}>0=\lambda_{\mathrm{c}}$
.
$\lambda_{2\to 2}>0=\lambda_{\mathrm{c}}$
.
Appendix A. Scaling functions
The volume-linear scaling
 $s_L$
appearing in Assumptions 2 and 4 is special because it transforms radial integrals in a predictable way. Up to an r-independent constant,
$s_L$
appearing in Assumptions 2 and 4 is special because it transforms radial integrals in a predictable way. Up to an r-independent constant,
 $\mathbf{V}_d(r)$
equals the volume of a hyperbolic ball with radius r, and
$\mathbf{V}_d(r)$
equals the volume of a hyperbolic ball with radius r, and
 $s_L$
can therefore be viewed as a conjugation between lengths and volumes. Therefore, for any measurable function
$s_L$
can therefore be viewed as a conjugation between lengths and volumes. Therefore, for any measurable function
 $\phi\colon \mathbb R_+\to \mathbb R_+$
, we have
$\phi\colon \mathbb R_+\to \mathbb R_+$
, we have
 \begin{equation} \int_{\mathbb{H}^d}\phi\big(s_L^{-1}(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))\big)\mu (\mathrm{d} x) = L\int_{\mathbb{H}^d}\phi(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))\mu(\mathrm{d} x). \end{equation}
\begin{equation} \int_{\mathbb{H}^d}\phi\big(s_L^{-1}(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))\big)\mu (\mathrm{d} x) = L\int_{\mathbb{H}^d}\phi(\mathrm{dist}_{{\mathbb{H}^d}}(x,o))\mu(\mathrm{d} x). \end{equation}
Also observe that
 $L\mapsto s_L$
is a homomorphism: for all
$L\mapsto s_L$
is a homomorphism: for all
 $L,M>0$
and
$L,M>0$
and
 $r>0$
,
$r>0$
,
 \begin{equation} s_M(s_L(r)) = \mathbf{V}_d^{-1}\big(M \mathbf{V}_d\big(\mathbf{V}_d^{-1}\big(L \mathbf{V}_d(r)\big)\big)\big) = \mathbf{V}_d^{-1}\left(ML \mathbf{V}_d(r)\right) = s_{ML}(r). \end{equation}
\begin{equation} s_M(s_L(r)) = \mathbf{V}_d^{-1}\big(M \mathbf{V}_d\big(\mathbf{V}_d^{-1}\big(L \mathbf{V}_d(r)\big)\big)\big) = \mathbf{V}_d^{-1}\left(ML \mathbf{V}_d(r)\right) = s_{ML}(r). \end{equation}
In particular, this means that
 $s_L^{-1} = s_{1/L}$
. The following lemma gives a picture of what the function
$s_L^{-1} = s_{1/L}$
. The following lemma gives a picture of what the function
 $s_L(r)$
actually looks like for large L.
$s_L(r)$
actually looks like for large L.
Lemma A.1. For sequences
 $\left\{r_n\right\}_{n\in\mathbb N}$
and
$\left\{r_n\right\}_{n\in\mathbb N}$
and
 $\left\{L_n\right\}_{n\in\mathbb N}$
such that
$\left\{L_n\right\}_{n\in\mathbb N}$
such that
 $L_n\to\infty$
,
$L_n\to\infty$
,
 \begin{equation*} s_{L_n}(r_n) \sim \begin{cases} \displaystyle L_n^{{1}/{d}}r_n &\text{if } r_n\ll L_n^{-{{1}/{d}}},\\[3pt] \displaystyle\frac{1}{d-1}\log L_n &\text{if } L_n^{-{1}/{d}}\ll r_n\ll \log L_n,\\ r_n &\text{if } r_n\gg \log L_n, \end{cases} \end{equation*}
\begin{equation*} s_{L_n}(r_n) \sim \begin{cases} \displaystyle L_n^{{1}/{d}}r_n &\text{if } r_n\ll L_n^{-{{1}/{d}}},\\[3pt] \displaystyle\frac{1}{d-1}\log L_n &\text{if } L_n^{-{1}/{d}}\ll r_n\ll \log L_n,\\ r_n &\text{if } r_n\gg \log L_n, \end{cases} \end{equation*}
as
 $n\to\infty$
.
$n\to\infty$
.
Proof. Observe that
 $\mathbf{V}_d(r)$
is monotone increasing and that, as
$\mathbf{V}_d(r)$
is monotone increasing and that, as
 $r\to\infty$
,
$r\to\infty$
,
 \begin{equation*} \mathbf{V}_d(r)\sim \frac{1}{d-1}\frac{1}{2^{d-1}}\mathrm{e}^{(d-1)r} \end{equation*}
\begin{equation*} \mathbf{V}_d(r)\sim \frac{1}{d-1}\frac{1}{2^{d-1}}\mathrm{e}^{(d-1)r} \end{equation*}
and, as
 $r\to 0$
,
$r\to 0$
,
 \begin{equation*} \mathbf{V}_d(r)\sim \frac{1}{d}r^d. \end{equation*}
\begin{equation*} \mathbf{V}_d(r)\sim \frac{1}{d}r^d. \end{equation*}
Therefore,
 \begin{equation*} s_L(r) \sim \begin{cases} \left(dL\mathbf{V}_d(r)\right)^{{1}/{d}} &\text{if }L\mathbf{V}_d(r)\to 0, \\ \displaystyle\frac{1}{d-1}\log L + \frac{1}{d-1}\log \mathbf{V}_d(r) &\text{if }L\mathbf{V}_d(r)\to\infty. \end{cases} \end{equation*}
\begin{equation*} s_L(r) \sim \begin{cases} \left(dL\mathbf{V}_d(r)\right)^{{1}/{d}} &\text{if }L\mathbf{V}_d(r)\to 0, \\ \displaystyle\frac{1}{d-1}\log L + \frac{1}{d-1}\log \mathbf{V}_d(r) &\text{if }L\mathbf{V}_d(r)\to\infty. \end{cases} \end{equation*}
If
 $L\to\infty$
and
$L\to\infty$
and
 $r\ll L^{-{1}/{d}}$
, we have
$r\ll L^{-{1}/{d}}$
, we have
 $L\mathbf{V}_d(r) \sim ({1}/{d})Lr^d\ll 1$
. Therefore,
$L\mathbf{V}_d(r) \sim ({1}/{d})Lr^d\ll 1$
. Therefore,
 $s_L(r)\sim L^{{1}/{d}}r$
.
$s_L(r)\sim L^{{1}/{d}}r$
.
If
 $L\to\infty$
and
$L\to\infty$
and
 $r\gg L^{-{1}/{d}}$
, then the monotonicity of
$r\gg L^{-{1}/{d}}$
, then the monotonicity of
 $\mathbf{V}_d(r)$
implies that
$\mathbf{V}_d(r)$
implies that
 $L\mathbf{V}_d(r)\to\infty$
. Therefore,
$L\mathbf{V}_d(r)\to\infty$
. Therefore,
 $s_L(r)\sim ({1}/{(d-1)})\log L + ({1}/{(d-1)})\log \mathbf{V}_d(r)$
. If
$s_L(r)\sim ({1}/{(d-1)})\log L + ({1}/{(d-1)})\log \mathbf{V}_d(r)$
. If
 $r\gg \log L$
then the latter term dominates, and if
$r\gg \log L$
then the latter term dominates, and if
 $r\ll\log L$
then the former dominates.
$r\ll\log L$
then the former dominates.
Recall that we refer to the family of functions
 $\left\{\sigma_L\right\}_{L>0}$
as a scaling function if all
$\left\{\sigma_L\right\}_{L>0}$
as a scaling function if all
 $\sigma_L\colon\mathbb R_+\to \mathbb R_+$
are increasing bijections such that
$\sigma_L\colon\mathbb R_+\to \mathbb R_+$
are increasing bijections such that
-
•
$\sigma_1(r)=r$
, -
• for all
$r>0$
,
$L\mapsto \sigma_L(r)$
is increasing and
$\lim_{L\to\infty}\sigma_L(r)=\infty$
.




Also recall that Assumption 1 required of the scaling and adjacency function that
 \begin{equation} \lim_{L\to\infty}\frac{\max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r} = 0 \end{equation}
\begin{equation} \lim_{L\to\infty}\frac{\max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r} = 0 \end{equation}
for all
 $R<\infty$
.
$R<\infty$
.
Lemma A.2. Suppose that
 $\#\mathcal E<\infty$
. For all
$\#\mathcal E<\infty$
. For all
 $\varphi$
such that
$\varphi$
such that
 $\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
, the volume-linear scaling function satisfies (A.3).
$\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
, the volume-linear scaling function satisfies (A.3).
Proof. Our bound for the numerator in (A.3) is independent of the scaling function. For all
 $a,b\in \mathcal E$
and
$a,b\in \mathcal E$
and
 $R\in[0,\infty]$
,
$R\in[0,\infty]$
,
 \begin{equation*} \int^R_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \leq \mathbf{V}_d\left(R\right). \end{equation*}
\begin{equation*} \int^R_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \leq \mathbf{V}_d\left(R\right). \end{equation*}
On the other hand, for all
 $a,b\in\mathcal E$
, the volume-linear scaling function means that
$a,b\in\mathcal E$
, the volume-linear scaling function means that
 \begin{equation*} \int^\infty_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r = L\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r. \end{equation*}
\begin{equation*} \int^\infty_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r = L\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r. \end{equation*}
Therefore, if
 $\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
then
$\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
then
 $\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r>0$
and
$\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r>0$
and
 \begin{align*} &\limsup_{L\to\infty}\frac{\max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r} \\ &\qquad \leq \frac{\mathbf{V}_d\left(R\right)}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r}\lim_{L\to\infty}\frac{1}{L} \\ &\qquad =0, \end{align*}
\begin{align*} &\limsup_{L\to\infty}\frac{\max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b) ({\sinh}\, r)^{d-1}\mathrm{d} r} \\ &\qquad \leq \frac{\mathbf{V}_d\left(R\right)}{\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r}\lim_{L\to\infty}\frac{1}{L} \\ &\qquad =0, \end{align*}
as required.
An alternative natural option for a scaling function is the length-linear scaling function
 $\sigma_L(r) = L r$
. However, the volume scaling effects of this simple length-linear scaling are rather complicated. In Euclidean
$\sigma_L(r) = L r$
. However, the volume scaling effects of this simple length-linear scaling are rather complicated. In Euclidean
 $\mathbb R^d$
, if we scale lengths by L then we scale volumes by
$\mathbb R^d$
, if we scale lengths by L then we scale volumes by
 $L^d$
. Specifically, if we have a measurable function
$L^d$
. Specifically, if we have a measurable function
 $\phi\colon \mathbb R_+\to \mathbb R_+$
then
$\phi\colon \mathbb R_+\to \mathbb R_+$
then
 \begin{equation*} \int_{\mathbb R^d}\phi\left(\frac{\lvert {x}\rvert}{L}\right)\mathrm{d} x = L^d \int_{\mathbb R^d}\phi\left(\lvert {x}\rvert\right)\mathrm{d} x. \end{equation*}
\begin{equation*} \int_{\mathbb R^d}\phi\left(\frac{\lvert {x}\rvert}{L}\right)\mathrm{d} x = L^d \int_{\mathbb R^d}\phi\left(\lvert {x}\rvert\right)\mathrm{d} x. \end{equation*}
On the other hand, there is no function
 $f\colon \mathbb R_+\to \mathbb R_+$
such that
$f\colon \mathbb R_+\to \mathbb R_+$
such that
 \begin{equation*} \int_{\mathbb{H}^d}\phi\left(\frac{\mathrm{dist}_{{\mathbb{H}^d}}(x,o)}{L}\right)\mu(\mathrm{d} x) = f(L)\int_{\mathbb{H}^d}\phi\left(\mathrm{dist}_{{\mathbb{H}^d}}(x,o)\right)\mu(\mathrm{d} x) \end{equation*}
\begin{equation*} \int_{\mathbb{H}^d}\phi\left(\frac{\mathrm{dist}_{{\mathbb{H}^d}}(x,o)}{L}\right)\mu(\mathrm{d} x) = f(L)\int_{\mathbb{H}^d}\phi\left(\mathrm{dist}_{{\mathbb{H}^d}}(x,o)\right)\mu(\mathrm{d} x) \end{equation*}
for all
 $\phi$
.
$\phi$
.
Lemma A.3. Suppose that
 $\#\mathcal E<\infty$
. For all
$\#\mathcal E<\infty$
. For all
 $\varphi$
such that
$\varphi$
such that
 $\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
, the length-linear scaling function satisfies (A.3).
$\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
, the length-linear scaling function satisfies (A.3).
Proof. As in the proof of Lemma A.2, for all
 $a,b\in \mathcal E$
and
$a,b\in \mathcal E$
and
 $R\in[0,\infty]$
,
$R\in[0,\infty]$
,
 \begin{equation*} \int^R_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \leq \mathbf{V}_d\left(R\right). \end{equation*}
\begin{equation*} \int^R_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \leq \mathbf{V}_d\left(R\right). \end{equation*}
On the other hand, for all
 $a,b\in\mathcal E$
, the length-linear scaling function means that
$a,b\in\mathcal E$
, the length-linear scaling function means that
 \begin{align*} \int^\infty_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r &= L\int^\infty_0\varphi(r;\,a,b)\left({\sinh}\, L r\right)^{d-1}\mathrm{d} r \\ &\geq L\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \end{align*}
\begin{align*} \int^\infty_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r &= L\int^\infty_0\varphi(r;\,a,b)\left({\sinh}\, L r\right)^{d-1}\mathrm{d} r \\ &\geq L\int^\infty_0\varphi(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \end{align*}
for
 $L\geq 1$
. The proof then concludes similarly as for Lemma A.2.
$L\geq 1$
. The proof then concludes similarly as for Lemma A.2.
It is also worth noting that there are also some adjacency functions for which (A.3) holds for any scaling function.
Lemma A.4. Suppose that
 $\#\mathcal E<\infty$
and that
$\#\mathcal E<\infty$
and that
 \begin{equation} \liminf_{r\searrow 0}\max_{a,b\in\mathcal E}\varphi(r;\,a,b)>0. \end{equation}
\begin{equation} \liminf_{r\searrow 0}\max_{a,b\in\mathcal E}\varphi(r;\,a,b)>0. \end{equation}
Then for any scaling function, (A.3) holds.
Proof. As in the previous lemmata, the numerator in (A.3) is bounded by
 $\mathbf{V}_d\left(R\right)$
, and we aim to show that the denominator diverges.
$\mathbf{V}_d\left(R\right)$
, and we aim to show that the denominator diverges.
Since
 $\lim_{L\to\infty}\sigma_L(r)=\infty$
for any
$\lim_{L\to\infty}\sigma_L(r)=\infty$
for any
 $r>0$
,
$r>0$
,
 $\lim_{L\to\infty}\sigma^{-1}_L(r)=0$
for any
$\lim_{L\to\infty}\sigma^{-1}_L(r)=0$
for any
 $r>0$
and
$r>0$
and
 \begin{equation*} \liminf_{L\to\infty}\varphi_L\left(r_\star;\,a,b\right) = \liminf_{r\to0}\varphi(r;\,a,b) \end{equation*}
\begin{equation*} \liminf_{L\to\infty}\varphi_L\left(r_\star;\,a,b\right) = \liminf_{r\to0}\varphi(r;\,a,b) \end{equation*}
for all
 $a,b\in\mathcal E$
and
$a,b\in\mathcal E$
and
 $r_*>0$
. Then by Fatou’s lemma and our suppositions,
$r_*>0$
. Then by Fatou’s lemma and our suppositions,
 \begin{align*} &\liminf_{L\to\infty}\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &\qquad\geq \int^\infty_0\Big(\liminf_{L\to\infty}\max_{a,b\in\mathcal E}\varphi_L(r;\,a,b)\Big)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &\qquad= \infty, \end{align*}
\begin{align*} &\liminf_{L\to\infty}\max_{a,b\in\mathcal E}\int^\infty_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &\qquad\geq \int^\infty_0\Big(\liminf_{L\to\infty}\max_{a,b\in\mathcal E}\varphi_L(r;\,a,b)\Big)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &\qquad= \infty, \end{align*}
as required.
Lemma A.5. Suppose that
 $\#\mathcal E<\infty$
,
$\#\mathcal E<\infty$
,
 $\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
, and that there exists
$\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
, and that there exists
 $\varepsilon>0$
such that
$\varepsilon>0$
such that
 \begin{equation*} \max_{a,b\in\mathcal E}{\mathrm{ess sup}}_{r<\varepsilon}\varphi(r;\,a,b) = 0. \end{equation*}
\begin{equation*} \max_{a,b\in\mathcal E}{\mathrm{ess sup}}_{r<\varepsilon}\varphi(r;\,a,b) = 0. \end{equation*}
Then for any scaling function, (A.3) holds.
Proof. Given
 $R<\infty$
, let
$R<\infty$
, let
 $L_0=L_0(R)$
satisfy
$L_0=L_0(R)$
satisfy
 $\sigma_{L_0}\left(\varepsilon\right)> R$
. Then, for all
$\sigma_{L_0}\left(\varepsilon\right)> R$
. Then, for all
 $L\geq L_0$
,
$L\geq L_0$
,
 \begin{equation*} \max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r = 0. \end{equation*}
\begin{equation*} \max_{a,b\in\mathcal E}\int^R_0\varphi_L(r;\,a,b)({\sinh}\, r)^{d-1}\mathrm{d} r = 0. \end{equation*}
The assumption
 $\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
then ensures that the denominator of (A.3) is strictly positive for all
$\max_{a,b\in\mathcal E}\int^\infty_0\varphi(r;\,a,b)\mathrm{d} r>0$
then ensures that the denominator of (A.3) is strictly positive for all
 $L>0$
, and therefore, the result follows.
$L>0$
, and therefore, the result follows.
One may initially (and incorrectly) expect that because scaling functions turn short edges into long edges the expected degree of a vertex will diverge. While this is true for the volume-linear and length-linear scaling functions, and for adjacency functions satisfying the condition (A.4) in Lemma A.4, the following example shows that it is not true in general.
Example A.1. Let
 $\mathcal E$
be a singleton (so we can neglect it from the notation) and consider the adjacency function
$\mathcal E$
be a singleton (so we can neglect it from the notation) and consider the adjacency function
 \begin{equation*} \varphi(r) = \unicode{x1D7D9}_{\left\{1 \lt r \lt 2\right\}} \end{equation*}
\begin{equation*} \varphi(r) = \unicode{x1D7D9}_{\left\{1 \lt r \lt 2\right\}} \end{equation*}
and the scaling function
 \begin{equation*} \sigma_L(r) = \begin{cases} Lr &\colon r\leq 1,\\ L + a_L(r-1) &\colon 1< r\leq {L}/{(1-a_L)},\\ r &\colon r>{L}/{(1-a_L)}, \end{cases} \end{equation*}
\begin{equation*} \sigma_L(r) = \begin{cases} Lr &\colon r\leq 1,\\ L + a_L(r-1) &\colon 1< r\leq {L}/{(1-a_L)},\\ r &\colon r>{L}/{(1-a_L)}, \end{cases} \end{equation*}
where
 $a_L = o(\mathrm{e}^{-L(d-1)})$
.
$a_L = o(\mathrm{e}^{-L(d-1)})$
.
Sketches of the example scaling and adjacency functions in Example A.1.

Figure A1 Long description
The image contains two separate graphs. The first graph, labeled as (a), is an example scaling function. The x-axis is labeled 'r' and the y-axis is labeled 'σ_L'. The graph shows a piecewise linear function with a sharp increase at 'r = 1' and another increase at 'r = L / (1 - a_L)'. The second graph, labeled as (b), is an example adjacency function. The x-axis is labeled 'r' and the y-axis is labeled 'φ'. The graph shows a step function that remains at 1 from 'r = 1' to 'r = 2' and then drops to 0. The adjacency function indicates the probability of edges existing between vertices based on their positions.
Lemma A.6. For this example,
 \begin{equation*} \lim_{L\to\infty}\mathbb{E}_{\lambda,L}\left[\#\left\{x\in\eta\colon o \sim x\:\textrm{in}\: \xi^o\right\}\right] = 0. \end{equation*}
\begin{equation*} \lim_{L\to\infty}\mathbb{E}_{\lambda,L}\left[\#\left\{x\in\eta\colon o \sim x\:\textrm{in}\: \xi^o\right\}\right] = 0. \end{equation*}
Proof. By Mecke’s formula and the substitution
 $r=\sigma_L(y)$
,
$r=\sigma_L(y)$
,
 \begin{align*} \mathbb{E}_{\lambda,L}\left[\#\left\{x\in\eta\colon o \sim x\:\textrm{in}\: \xi^o\right\}\right] &= \lambda\mathfrak{S}_{d-1}\int^\infty_0\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &= \lambda\mathfrak{S}_{d-1}\int^2_1\sigma'_L\left(y\right)\left({\sinh}\, \sigma_L(y)\right)^{d-1}\mathrm{d} y. \end{align*}
\begin{align*} \mathbb{E}_{\lambda,L}\left[\#\left\{x\in\eta\colon o \sim x\:\textrm{in}\: \xi^o\right\}\right] &= \lambda\mathfrak{S}_{d-1}\int^\infty_0\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r \\ &= \lambda\mathfrak{S}_{d-1}\int^2_1\sigma'_L\left(y\right)\left({\sinh}\, \sigma_L(y)\right)^{d-1}\mathrm{d} y. \end{align*}
The scaling function
 $\sigma_L$
is simple to differentiate (almost everywhere) and we find that
$\sigma_L$
is simple to differentiate (almost everywhere) and we find that
 \begin{equation*} \sigma'(r) = \begin{cases} L &\colon r< 1,\\ a_L &\colon 1< r< {L}/{(1-a_L)},\\ 1 &\colon r>{L}/{(1-a_L)}. \end{cases} \end{equation*}
\begin{equation*} \sigma'(r) = \begin{cases} L &\colon r< 1,\\ a_L &\colon 1< r< {L}/{(1-a_L)},\\ 1 &\colon r>{L}/{(1-a_L)}. \end{cases} \end{equation*}
Therefore,
 \begin{equation*} \int^2_1\sigma'_L\left(y\right)\left({\sinh}\, \sigma_L(y)\right)^{d-1}\mathrm{d} y = a_L\int^2_1\left({\sinh}\, \left(L + a_L(y-1)\right)\right)^{d-1}\mathrm{d} y \leq 2a_L\mathrm{e}^{L(d-1)}\to 0, \end{equation*}
\begin{equation*} \int^2_1\sigma'_L\left(y\right)\left({\sinh}\, \sigma_L(y)\right)^{d-1}\mathrm{d} y = a_L\int^2_1\left({\sinh}\, \left(L + a_L(y-1)\right)\right)^{d-1}\mathrm{d} y \leq 2a_L\mathrm{e}^{L(d-1)}\to 0, \end{equation*}
where the inequality holds for sufficiently large L (so
 $a_L\leq {\log 2}/{(d-1)}$
).
$a_L\leq {\log 2}/{(d-1)}$
).
The following example demonstrates that condition (A.3) does not follow from
 $\sigma_L$
being a scaling function, and it is indeed a required part of Assumption 1.
$\sigma_L$
being a scaling function, and it is indeed a required part of Assumption 1.
Example A.2. Let
 $\mathcal E$
be a singleton (so we can neglect it from the notation) and consider the adjacency function
$\mathcal E$
be a singleton (so we can neglect it from the notation) and consider the adjacency function
 \begin{equation*} \varphi(r) = \sum^\infty_{i=0}\unicode{x1D7D9}_{\left\{2^{-2i-1} \lt r \lt 2^{-2i}\right\}}. \end{equation*}
\begin{equation*} \varphi(r) = \sum^\infty_{i=0}\unicode{x1D7D9}_{\left\{2^{-2i-1} \lt r \lt 2^{-2i}\right\}}. \end{equation*}
Before defining our scaling function, we define a ‘dummy’ (continuous) scaling function
 $\overline{\sigma}_L$
by its derivative. Fix
$\overline{\sigma}_L$
by its derivative. Fix
 $R\in(0,\infty)$
and, for
$R\in(0,\infty)$
and, for
 $L\geq R$
, let
$L\geq R$
, let
 \begin{equation*} \overline{\sigma}'_L(r) = \begin{cases} L &\colon r<{R}/{L}, \\ 1 &\colon \exists i\in\mathbb N_0 \colon r\in(2^{-2i-1},2^{-2i})\cap\left({R}/{L},1\right), \\ 2^{2i+2} &\colon \exists i\in\mathbb N_0 \colon r\in(2^{-2i-2},2^{-2i-1})\cap\left({R}/{L},1\right), \\ 1 &\colon r>1. \end{cases} \end{equation*}
\begin{equation*} \overline{\sigma}'_L(r) = \begin{cases} L &\colon r<{R}/{L}, \\ 1 &\colon \exists i\in\mathbb N_0 \colon r\in(2^{-2i-1},2^{-2i})\cap\left({R}/{L},1\right), \\ 2^{2i+2} &\colon \exists i\in\mathbb N_0 \colon r\in(2^{-2i-2},2^{-2i-1})\cap\left({R}/{L},1\right), \\ 1 &\colon r>1. \end{cases} \end{equation*}
Then we can choose
 $a_L\in(0,1)$
such that
$a_L\in(0,1)$
such that
 \begin{equation} a_L = o\left(\frac{1}{\int^1_{{1}/{3}}\left({\sinh}\, \overline{\sigma}_L(r)\right)^{d-1}\mathrm{d} r}\right) \end{equation}
\begin{equation} a_L = o\left(\frac{1}{\int^1_{{1}/{3}}\left({\sinh}\, \overline{\sigma}_L(r)\right)^{d-1}\mathrm{d} r}\right) \end{equation}
as
 $L\to\infty$
. Now, for
$L\to\infty$
. Now, for
 $L\geq R$
, define the true (continuous) scaling function
$L\geq R$
, define the true (continuous) scaling function
 $\sigma_L$
by its derivative:
$\sigma_L$
by its derivative:
 \begin{equation*} \sigma'_L(r) = \begin{cases} L &\colon r<{R}/{L},\\ a_L &\colon \exists i\in\mathbb N_0 \colon r\in\big(2^{-2i-1},2^{-2i}\big)\cap\left({R}/{L},1\right),\\ 2^{2i+2} &\colon \exists i\in\mathbb N_0 \colon r\in\big(2^{-2i-2},2^{-2i-1}\big)\cap\left({R}/{L},1\right),\\ 1 &\colon r>1. \end{cases} \end{equation*}
\begin{equation*} \sigma'_L(r) = \begin{cases} L &\colon r<{R}/{L},\\ a_L &\colon \exists i\in\mathbb N_0 \colon r\in\big(2^{-2i-1},2^{-2i}\big)\cap\left({R}/{L},1\right),\\ 2^{2i+2} &\colon \exists i\in\mathbb N_0 \colon r\in\big(2^{-2i-2},2^{-2i-1}\big)\cap\left({R}/{L},1\right),\\ 1 &\colon r>1. \end{cases} \end{equation*}
Observe that
 $\overline{\sigma}_L(r) \geq \sigma_L(r)$
for all
$\overline{\sigma}_L(r) \geq \sigma_L(r)$
for all
 $r\geq 0$
. The idea behind this scaling function is that, for
$r\geq 0$
. The idea behind this scaling function is that, for
 $r<\sigma_L^{-1}\left(R\right)$
, the scaling function is just the normal length-linear scaling function. Then for larger r, the scaling function is a ‘ladder’ that is very shallow when
$r<\sigma_L^{-1}\left(R\right)$
, the scaling function is just the normal length-linear scaling function. Then for larger r, the scaling function is a ‘ladder’ that is very shallow when
 $\varphi(r)>0$
and very steep when
$\varphi(r)>0$
and very steep when
 $\varphi(r)=0$
(the derivative for
$\varphi(r)=0$
(the derivative for
 $r> 1$
is unimportant other than being
$r> 1$
is unimportant other than being
 $\geq 1$
). The precise steepness of the steep segments is chosen so that the total increase in
$\geq 1$
). The precise steepness of the steep segments is chosen so that the total increase in
 $\sigma_L$
on each of these segments is exactly 1, and the dummy scaling function was introduced so that we know how shallow the shallow segments needed to be.
$\sigma_L$
on each of these segments is exactly 1, and the dummy scaling function was introduced so that we know how shallow the shallow segments needed to be.
Let us check that
 $\sigma_L$
is indeed a scaling function. It is clearly strictly increasing in r and diverges as
$\sigma_L$
is indeed a scaling function. It is clearly strictly increasing in r and diverges as
 $r\to\infty$
. As L increases, the transition point
$r\to\infty$
. As L increases, the transition point
 ${R}/{L}$
decreases towards 0, and therefore, more and more shallow intervals are revealed. Since each steep interval adds 1 to
${R}/{L}$
decreases towards 0, and therefore, more and more shallow intervals are revealed. Since each steep interval adds 1 to
 $\sigma_L(r)$
, we have
$\sigma_L(r)$
, we have
 $\sigma_L(r)\to\infty$
as
$\sigma_L(r)\to\infty$
as
 $L\to\infty$
for all
$L\to\infty$
for all
 $r>0$
. The same argument also shows that
$r>0$
. The same argument also shows that
 $\overline{\sigma}_L$
is a scaling function and, in particular, that
$\overline{\sigma}_L$
is a scaling function and, in particular, that
 $\lim_{L\to\infty} \overline{\sigma}_L(r)=\infty$
for all
$\lim_{L\to\infty} \overline{\sigma}_L(r)=\infty$
for all
 $r>0$
. This then shows that necessarily
$r>0$
. This then shows that necessarily
 $a_L\to0$
as
$a_L\to0$
as
 $L\to\infty$
.
$L\to\infty$
.
Now let
 $\varphi_L(r)$
be the scaled adjacency function using the true scaling function
$\varphi_L(r)$
be the scaled adjacency function using the true scaling function
 $\sigma_L$
(not the dummy scaling function
$\sigma_L$
(not the dummy scaling function
 $\overline{\sigma}_L$
).
$\overline{\sigma}_L$
).
Plot of the scaling function
 $\sigma_L$
in Example A.2 for
$\sigma_L$
in Example A.2 for
 $R=0.25$
, using MATLAB.
$R=0.25$
, using MATLAB.

Figure A2 Long description
The line graph presents the scaling function sigma_L in Example A.2 for R equals 0.25 using MATLAB. The x-axis ranges from 10^-3 to 10^0, and the y-axis ranges from 10^-2 to 10^1. The graph includes multiple lines representing different values of sigma_L, with solid, dashed, and dotted lines indicating various parameters. The solid line represents r, the dashed line represents sigma_5(r), the dotted line represents sigma_25(r), the dash-dotted line represents sigma_125(r), and the solid thick line represents sigma_625(r). All values are approximated.
Lemma A.7. For this example, (A.3) does not hold.
Proof. By changing variables
 $y=\sigma_L(r)$
(and back for the last equality) we have
$y=\sigma_L(r)$
(and back for the last equality) we have
 \begin{align*} \int^R_0\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r &= L\int^{{R}/{L}}_0\varphi(y)\left({\sinh}\, Ly\right)^{d-1}\mathrm{d} y \\ &\geq L\int^{{R}/{3L}}_0\left({\sinh}\, Ly\right)^{d-1}\mathrm{d} y \\ &= \mathbf{V}_d\left(\frac{R}{3}\right). \end{align*}
\begin{align*} \int^R_0\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r &= L\int^{{R}/{L}}_0\varphi(y)\left({\sinh}\, Ly\right)^{d-1}\mathrm{d} y \\ &\geq L\int^{{R}/{3L}}_0\left({\sinh}\, Ly\right)^{d-1}\mathrm{d} y \\ &= \mathbf{V}_d\left(\frac{R}{3}\right). \end{align*}
In the above inequality we have used the fact that
 $\left({\sinh}\, Ly\right)^{d-1}$
is increasing in y to move the intervals on which
$\left({\sinh}\, Ly\right)^{d-1}$
is increasing in y to move the intervals on which
 $\varphi(y)> 0$
towards 0. The total Lebesgue measure of these intervals intersected with
$\varphi(y)> 0$
towards 0. The total Lebesgue measure of these intervals intersected with
 $\left(0,{R}/{L}\right)$
is always greater than or equal to
$\left(0,{R}/{L}\right)$
is always greater than or equal to
 ${R}/{3L}$
(achieved when
${R}/{3L}$
(achieved when
 ${R}/{L}$
coincides with the lower bound of one of these positive intervals), and therefore,
${R}/{L}$
coincides with the lower bound of one of these positive intervals), and therefore,
 ${R}/{3L}$
appears in the integral bound.
${R}/{3L}$
appears in the integral bound.
We now prove that (A.3) does not hold by showing that
 \begin{equation*} \int^\infty_R\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r \to 0 \quad\text{as }L\to \infty. \end{equation*}
\begin{equation*} \int^\infty_R\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r \to 0 \quad\text{as }L\to \infty. \end{equation*}
The same change of variables as above shows that
 \begin{align*} \int^\infty_R\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r &= \int^\infty_{{R}/{L}}\varphi(y)\sigma'_L(y)\left({\sinh}\, \sigma_L\left(y\right)\right)^{d-1}\mathrm{d} y \\ &\leq a_L \int^1_{{R}/{L}}\varphi(y)\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}\mathrm{d} y, \end{align*}
\begin{align*} \int^\infty_R\varphi_L(r)({\sinh}\, r)^{d-1}\mathrm{d} r &= \int^\infty_{{R}/{L}}\varphi(y)\sigma'_L(y)\left({\sinh}\, \sigma_L\left(y\right)\right)^{d-1}\mathrm{d} y \\ &\leq a_L \int^1_{{R}/{L}}\varphi(y)\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}\mathrm{d} y, \end{align*}
where in the inequality we have used the fact that on
 $r>{R}/{L}$
the property
$r>{R}/{L}$
the property
 $\varphi(y)>0$
implies that
$\varphi(y)>0$
implies that
 $\sigma'_L(y)=a_L$
,
$\sigma'_L(y)=a_L$
,
 $\overline{\sigma}_L(y)\geq \sigma_L(y)$
, and that
$\overline{\sigma}_L(y)\geq \sigma_L(y)$
, and that
 $\varphi(y)=0$
for
$\varphi(y)=0$
for
 $y>1$
. Then since
$y>1$
. Then since
 $\int^1_0\varphi(y)\,\mathrm{d} y = \tfrac{2}{3}$
and
$\int^1_0\varphi(y)\,\mathrm{d} y = \tfrac{2}{3}$
and
 $\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}$
is increasing in y, we can move the intervals of
$\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}$
is increasing in y, we can move the intervals of
 $\varphi$
towards 1 to obtain
$\varphi$
towards 1 to obtain
 \begin{equation*} a_L \int^1_{{R}/{L}}\varphi(y)\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}\mathrm{d} y \leq a_L \int^1_\frac{1}{3}\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}\mathrm{d} y. \end{equation*}
\begin{equation*} a_L \int^1_{{R}/{L}}\varphi(y)\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}\mathrm{d} y \leq a_L \int^1_\frac{1}{3}\left({\sinh}\, \overline{\sigma}_L\left(y\right)\right)^{d-1}\mathrm{d} y. \end{equation*}
The bound on
 $a_L$
in (A.5) then gives us the result.
$a_L$
in (A.5) then gives us the result.
Acknowledgements
The author would like to thank the Isaac Newton Institute for Mathematical Sciences, Cambridge, for support and hospitality during the programme Stochastic systems for anomalous diffusion, where work on this paper was undertaken. Thanks are also due to Petr Kosenko for guiding the author to the spherical transform, Markus Heydenreich for their discussions about RCMs and percolation on hyperbolic spaces, and Gordon Slade and a referee for their advice on presenting the paper.
Funding information
This work was supported in parts by EPSRC grant EP/Z000580/1 and by NSERC of Canada.
Competing interests
There were no competing interests to declare which arose during the preparation or publication process of this article.




 QdB(ϱ;0)
QdB(ϱ;0) d=2,3,4,5
d=2,3,4,5 ®
®
 L∗(θ)
L∗(θ)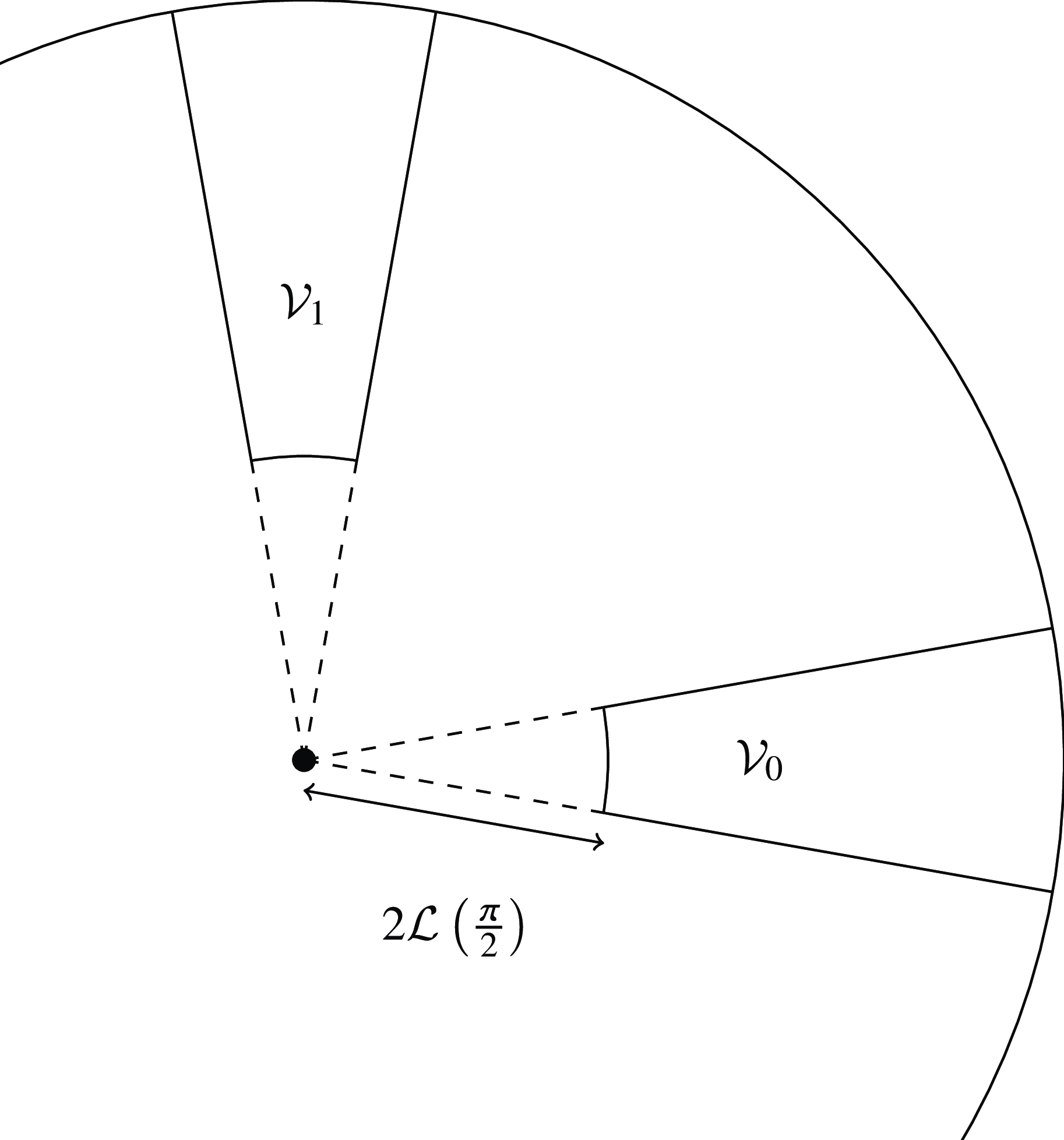
 V0
V0 V1
V1 H2
H2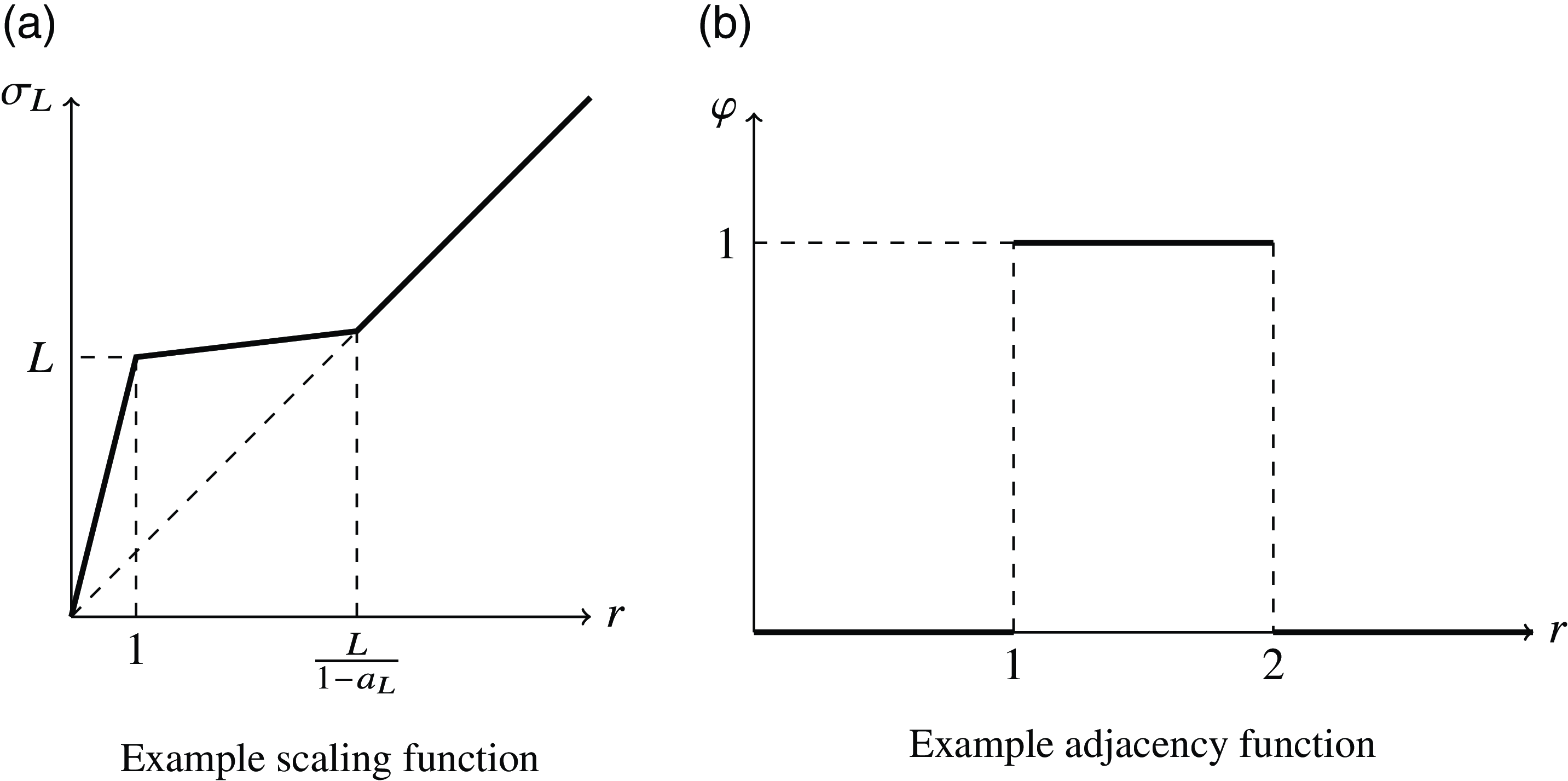

 σL
σL R=0.25
R=0.25
 Open access
Open access