1. Introduction
Humanoid robots, capable of emulating humans in performing complex tasks, have become indispensable in fields such as industrial automation [Reference Ying, Pourhejazy, Cheng and Cai1, Reference Zhang, Chen, Zhang and Jia2], healthcare [Reference Chen, Guo, Li, Yan and Jiang3], and home services [Reference Ren, Zhou, Xu, Yang, Zhai, Leibold, Ni, Zhang, Buss and Zheng4, Reference Zhu, Gienger, Franzese and Kober5]. Among the essential technologies for humanoid robots, achieving dexterous upper-limb control is crucial. However, current dual-arm robots encounter significant challenges related to dexterity, flexibility, and adaptability [Reference Meng, Zhang, Zhao and Lam6, Reference Wang, Guo, Xu, Zhang, Sun and Xu7].
Integrating human intelligence into a dual-arm closed-loop system holds promise for overcoming these challenges. Physical human–robot collaboration (pHRC) fosters inclusive and interactive collaboration by merging human and dual-arm robotic strengths. Utilizing physical feedback, robots can discern human intentions and adjust their actions in real time, facilitating seamless human–robot integration [Reference Wen, Rouxel, Mistry, Li and Tiseo8, Reference Bauer, Wollherr and Buss9]. However, nonlinear impact disturbances, such as unconscious movements, collisions, or operational errors during collaboration, may destabilize robots, causing actions like shaking or jumping, which jeopardize safety.
Compliance control is a widely acknowledged solution to these challenges, with impedance and admittance control being predominant approaches [Reference Calanca, Muradore and Fiorini10, Reference Keemink, Van der Kooij and Stienen11]. Impedance control relies on precise dynamic parameter identification and nonlinear control, yet many collaborative robots use current estimation for torque-based impedance control, leading to suboptimal performance [Reference Hogan12, Reference Ott13]. Admittance control, which uses force/torque sensors for direct contact force detection, is currently the most effective and widely adopted method [Reference Adams and Hannaford14, Reference Hashtrudi-Zaad and Salcudean15]. However, traditional admittance control employs fixed parameters, lacking adaptability to dynamically track changes in human intentions [Reference Hogan16, Reference He, Xue, Yu, Li and Yang17]. To address this, force classification logic based on human intention perception has been developed, along with adaptive variable admittance methods that consider inertial forces to enable compliant interaction [Reference Shen, Li, Tian, Duan and Liu18, Reference Wu, Shen, Li, Li and Tian19]. Although these methods enhance alignment with human intentions, they do not fully mitigate nonlinear impact disturbances. Some studies employ signal threshold filtering and mathematical model matching to distinguish collision forces from expected contact forces [Reference Haddadin, De Luca and Albu-Schäffer20, Reference Lin, Yu and Liu21]. However, these approaches are limited by time delays and recovery errors, adversely affecting real-time responsiveness and accuracy in human–robot collaboration. Additionally, research [Reference Adorno, Fraisse and Druon22] identifies collisions based on force magnitude, effectively detecting collisions but causing immediate cessation of system operations, which fails to provide shock resistance during tasks.
To address these challenges, a novel shear-thickening fluid controller (SFC) was proposed in ref. [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23], enabling robots to effectively resist external impact forces while complying with traction forces. The controller exploits the solid–liquid phase transition properties of shear-thickening fluids (STFs), which rapidly increase viscosity under high shear stress, enhancing system damping characteristics for shock absorption and cushioning. This approach has proven successful in machining applications [Reference Wei, Lin and Sun24, Reference Li, Lyu, Yuan, Dong and Dai25]. However, analyses and experiments revealed limitations; the STF-based controller relies solely on shear-thickening properties, neglecting insufficient viscosity under low shear stress conditions. Consequently, upon traction force removal, robots may continue movement at low speeds, leading to inaccuracies and safety concerns. Furthermore, this control method is not directly applicable to closed-chain systems like dual-arm robots. In human/dual-arm robot collaboration, addressing both random external forces and coordinated dual-arm synergy is essential. These limitations constrain the application and development of human/dual-arm collaboration across various domains.
The remainder of this paper is organized as follows. Section II reviews the applications and limitations of linear admittance control (L-AC) and SFC in pHRC. Section III discusses the design of the improved shear thickening fluid control (ISFC) and analyzes its stability and dynamic characteristics. Sections IV and V present the simulation and experimental results, respectively, validating the superiority of the proposed ISFC method. Finally, Section VI concludes the paper.
2. A pHRC framework based on virtual dynamics control
2.1. Physical human–robot collaboration framework
The essence of pHRC lies in enabling robots to emulate the dynamic characteristics of real-world physical systems by adjusting the virtual dynamic relationship between input forces and output displacements within the system. For instance, admittance control facilitates human–robot interaction by allowing the robot to simulate the behavior of a second-order spring-damping system. A framework for human–robot collaboration based on force controller module is illustrated in Figure 1. This framework comprises three key modules: the force control layer, the robot lower-level control Layer, and the pHRC Module [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23].

Figure 1. Schematic diagram of pHRC framework.
The force control layer is mainly composed of load identification, gravity/inertial force compensation module, and force controller. Among them, the force controller generates the appropriate velocity
 ${\mathbf{x}}({\textrm {t}})$
based on the external force
${\mathbf{x}}({\textrm {t}})$
based on the external force
 ${\textbf {f}}_{\textrm {ext}}$
. This module can be implemented using L-AC, characterized by a second-order spring-damping system, and can also extend to simulate other physical processes, such as shear-thickening fluid dynamics.
${\textbf {f}}_{\textrm {ext}}$
. This module can be implemented using L-AC, characterized by a second-order spring-damping system, and can also extend to simulate other physical processes, such as shear-thickening fluid dynamics.
The robot lower-level control layer primarily consists of an inverse kinematics solver, a servo controller, and the robot mechanical system. After calculating the robot’s position command in Cartesian space, the desired joint angle
 ${\textbf {q}}_{\textrm {d}}$
is determined via the inverse kinematics solver, which supplies joint position commands to the servo controller. The controller, in turn, generates the necessary joint torques
${\textbf {q}}_{\textrm {d}}$
is determined via the inverse kinematics solver, which supplies joint position commands to the servo controller. The controller, in turn, generates the necessary joint torques
 $\boldsymbol{\tau }$
, based on the velocity commands to drive the robot towards the desired velocity and position.
$\boldsymbol{\tau }$
, based on the velocity commands to drive the robot towards the desired velocity and position.
The inverse kinematics solver typically employs the inverse Jacobian matrix approach to establish the relationship between the joint velocities and the end-effector velocities, as expressed in the following equations:
 \begin{equation} \begin{array}{l} \textbf {x}\left ( \textrm {t} \right ) = \textbf {J}\left ( {\textbf {q}\left ( \textrm {t} \right )} \right )\dot {\textbf {q}}\left (\textrm {t} \right )\\ \dot {\textbf {q}}\left ( \textrm {t} \right ) = \textbf {J}{\left ( {\textbf {q}\left ( \textrm {t} \right )} \right )^{ - 1}} \textbf {x}\left ( \textrm {t} \right ) \end{array} \end{equation}
\begin{equation} \begin{array}{l} \textbf {x}\left ( \textrm {t} \right ) = \textbf {J}\left ( {\textbf {q}\left ( \textrm {t} \right )} \right )\dot {\textbf {q}}\left (\textrm {t} \right )\\ \dot {\textbf {q}}\left ( \textrm {t} \right ) = \textbf {J}{\left ( {\textbf {q}\left ( \textrm {t} \right )} \right )^{ - 1}} \textbf {x}\left ( \textrm {t} \right ) \end{array} \end{equation}
where
 $\dot {\textbf {q}}\left ( \textrm {t} \right ) \in {\mathbb{R}}{^n}$
represents robot joint velocity vector, with
$\dot {\textbf {q}}\left ( \textrm {t} \right ) \in {\mathbb{R}}{^n}$
represents robot joint velocity vector, with
 $n$
denoting the number of joints.
$n$
denoting the number of joints.
 $\textbf {x}\left ( \textrm {t} \right ) \in {\mathbb{R}}{^m}$
is the velocity vector of the robot’s
$\textbf {x}\left ( \textrm {t} \right ) \in {\mathbb{R}}{^m}$
is the velocity vector of the robot’s
 $m$
-dimensional robot end-effector in Cartesian space, and
$m$
-dimensional robot end-effector in Cartesian space, and
 $\textbf {J}{\left ( {\textbf {q}\left ( \textrm {t} \right )} \right ) }\in {{\mathbb{R}}^{m \times n}}$
corresponds to the Jacobian matrix.
$\textbf {J}{\left ( {\textbf {q}\left ( \textrm {t} \right )} \right ) }\in {{\mathbb{R}}^{m \times n}}$
corresponds to the Jacobian matrix.
A major limitation of the traditional inverse Jacobian method lies in its inability to handle situations when the robot operates near or at a singularity. From the perspective of linear equations, a robot approaching a singularity results in an ill-conditioned Jacobian matrix, where even a small
 $\textbf {x}\left ( \textrm {t} \right )$
can lead to disproportionately large
$\textbf {x}\left ( \textrm {t} \right )$
can lead to disproportionately large
 $\dot {\textbf {q}}\left ( \textrm {t} \right )$
, making the system sensitive to numerical errors. At a singularity, the equations may either have no solutions or infinitely many solutions.
$\dot {\textbf {q}}\left ( \textrm {t} \right )$
, making the system sensitive to numerical errors. At a singularity, the equations may either have no solutions or infinitely many solutions.
To address the issues of singularities and redundancy, the pseudo-inverse of the Jacobian matrix can be calculated using the damped least squares method, as shown in the equation below:
 \begin{equation} \textbf {J}{\left ( \textbf {q} \right )^\dagger } = \textbf {J}{\left ( \textbf {q} \right )^T}{\left ( {\textbf {J}\left ( \textbf {q} \right )\textbf {J}{{\left ( \textbf {q} \right )}^T} + {\lambda _d}^2 \textbf {I}} \right )^{ - 1}} \end{equation}
\begin{equation} \textbf {J}{\left ( \textbf {q} \right )^\dagger } = \textbf {J}{\left ( \textbf {q} \right )^T}{\left ( {\textbf {J}\left ( \textbf {q} \right )\textbf {J}{{\left ( \textbf {q} \right )}^T} + {\lambda _d}^2 \textbf {I}} \right )^{ - 1}} \end{equation}
where
 ${\lambda _d} \gt 0$
is a small damping factor introduced to mitigate the effects of singularities. As the robot approaches a singularity, this damping term reduces the sensitivity of the system to ill-conditioned Jacobian.
${\lambda _d} \gt 0$
is a small damping factor introduced to mitigate the effects of singularities. As the robot approaches a singularity, this damping term reduces the sensitivity of the system to ill-conditioned Jacobian.
Using the pseudo-inverse of the Jacobian matrix in Eq. (2), the inverse kinematics relation of the robot can be calculated:
 \begin{equation} {\dot {\textbf {q}}_{\textrm {d}}}\left ( {\textrm {t}} \right ) = \textbf {J}{\left ( \textbf {q} \right )^\dagger }{\dot {\bar {\textbf {x}}}}\left ( {\textrm {t}} \right ) \end{equation}
\begin{equation} {\dot {\textbf {q}}_{\textrm {d}}}\left ( {\textrm {t}} \right ) = \textbf {J}{\left ( \textbf {q} \right )^\dagger }{\dot {\bar {\textbf {x}}}}\left ( {\textrm {t}} \right ) \end{equation}
where
 ${\dot {\bar {\textbf {x}}}}\left ( {\textrm {t}} \right )$
refers to the target velocity of the robot’s end-effector corresponding to the virtual dynamics, and
${\dot {\bar {\textbf {x}}}}\left ( {\textrm {t}} \right )$
refers to the target velocity of the robot’s end-effector corresponding to the virtual dynamics, and
 ${\dot {\textbf {q}}_{\textrm {d}}}\left ( {\textrm {t}} \right )$
is the configuration space velocity to reach velocity
${\dot {\textbf {q}}_{\textrm {d}}}\left ( {\textrm {t}} \right )$
is the configuration space velocity to reach velocity
 ${\dot {\bar {\textbf {x}}}}\left ( {\textrm {t}} \right )$
.
${\dot {\bar {\textbf {x}}}}\left ( {\textrm {t}} \right )$
.
The pHRC module captures and abstracts the interactive relationship between the human operator and the robot. It defines the external force
 ${\textbf {f}}_{\textrm {ext}}$
, as a combination of the feedback force generated by the operator
${\textbf {f}}_{\textrm {ext}}$
, as a combination of the feedback force generated by the operator
 ${\textbf {f}}_{\textrm {h}}$
and the force exerted by the environment on the robot
${\textbf {f}}_{\textrm {h}}$
and the force exerted by the environment on the robot
 ${\textbf {f}}_{\textrm {env}}$
. This abstraction enables closed-loop control by interpreting the physical interaction as a force signal. During the collaboration process, the robot operates outside physical cages, sharing the workspace with the operator. However, environmental disturbances can manifest as random impacts on
${\textbf {f}}_{\textrm {env}}$
. This abstraction enables closed-loop control by interpreting the physical interaction as a force signal. During the collaboration process, the robot operates outside physical cages, sharing the workspace with the operator. However, environmental disturbances can manifest as random impacts on
 ${\textbf {f}}_{\textrm {ext}}$
, potentially causing the robot to shake or make unintended movements. Consequently, the virtual dynamics model must not only adapt to the operator’s intended traction forces but also actively resist such disturbances to ensure collaboration safety.
${\textbf {f}}_{\textrm {ext}}$
, potentially causing the robot to shake or make unintended movements. Consequently, the virtual dynamics model must not only adapt to the operator’s intended traction forces but also actively resist such disturbances to ensure collaboration safety.
2.2. pHRC framework based on L-AC and SFC
As previously discussed, the L-AC algorithm can be employed to design the force control module. Given that the multi-dimensional motion of the robot can be represented as a linear superposition of single-dimensional motions [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23], L-AC can be defined as follows:
 \begin{equation} {m_A}\ddot x\left ( t \right ) + {\mu _A}\dot x\left ( t \right ) = {f_{{\textrm {ext}}}}\left ( t \right ) \end{equation}
\begin{equation} {m_A}\ddot x\left ( t \right ) + {\mu _A}\dot x\left ( t \right ) = {f_{{\textrm {ext}}}}\left ( t \right ) \end{equation}
where
 ${{m}}_{{A}}$
and
${{m}}_{{A}}$
and
 ${\mu _A}$
denote the virtual inertia and damping parameters of the controller, respectively, both of which must be positive. The term
${\mu _A}$
denote the virtual inertia and damping parameters of the controller, respectively, both of which must be positive. The term
 ${f_{{\textrm {ext}}}}\left ( t \right )$
represents the external force applied to the robot’s end-effector, while
${f_{{\textrm {ext}}}}\left ( t \right )$
represents the external force applied to the robot’s end-effector, while
 $\ddot x$
and
$\ddot x$
and
 $\dot x$
denote the acceleration and velocity, respectively.
$\dot x$
denote the acceleration and velocity, respectively.

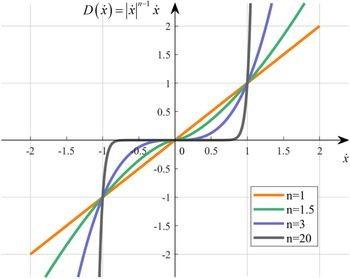
Figure 2. The relationship between velocity (X-axis) and normalized nonlinear damping force(Y-axis).
The relationship between the input and output of L-AC is linear, as indicated in Eq. (4). Consequently, L-AC cannot differentiate between traction and impact forces, which limits its effectiveness in resisting random impacts.
To overcome this limitation, a virtual dynamics control model based on shear-thickened fluid (STF) characteristics was proposed in ref. [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23]. This model enables the robot to simulate the dynamics of solid–liquid phase transitions in STFs, behaving like a soft liquid under light contact while becoming rigid when subjected to strong impacts. The dynamic equation for this model can be expressed as follows:
 \begin{equation} m\ddot x\left ( t \right ) + \mu {\left | {\dot x\left ( t \right )} \right |^{n - 1}}\dot x\left ( t \right ) = {f_{{\textrm {ext}}}}\left ( t \right ) \end{equation}
\begin{equation} m\ddot x\left ( t \right ) + \mu {\left | {\dot x\left ( t \right )} \right |^{n - 1}}\dot x\left ( t \right ) = {f_{{\textrm {ext}}}}\left ( t \right ) \end{equation}
where
 ${D( {\dot x} ) = \mu { | {\dot x} |^{n - 1}}\dot x}$
represents the nonlinear damping term, which can be derived from the constitutive equation of STFs.
${D( {\dot x} ) = \mu { | {\dot x} |^{n - 1}}\dot x}$
represents the nonlinear damping term, which can be derived from the constitutive equation of STFs.
 $m \gt 0$
is the virtual inertial term, and
$m \gt 0$
is the virtual inertial term, and
 $\mu \ge 0$
a constant that characterizes the internal flow resistance properties of the material.
$\mu \ge 0$
a constant that characterizes the internal flow resistance properties of the material.
The principle behind the STF-based control is to indirectly adjust the nonlinear term within the controller through the external force
 $f_{{\textrm {ext}}}$
, enabling the system to resist impacts while following the operator’s traction. Specifically, the nonlinear damping term increases with the system’s speed, allowing for rapid energy dissipation and enhanced impact resistance.
$f_{{\textrm {ext}}}$
, enabling the system to resist impacts while following the operator’s traction. Specifically, the nonlinear damping term increases with the system’s speed, allowing for rapid energy dissipation and enhanced impact resistance.
The behavior of the nonlinear damping force in relation to velocity is illustrated in Figure 2. The
 $X$
-axis represents velocity
$X$
-axis represents velocity
 $\dot x$
, while the
$\dot x$
, while the
 $Y$
-axis shows the nonlinear damping force (
$Y$
-axis shows the nonlinear damping force (
 $D( {\dot x} ) = \mu { | {\dot x} |^{n - 1}}\dot x$
), with
$D( {\dot x} ) = \mu { | {\dot x} |^{n - 1}}\dot x$
), with
 $\mu$
set to 1 and
$\mu$
set to 1 and
 $n$
taking values of 1, 1.5, 3, and 20. The function
$n$
taking values of 1, 1.5, 3, and 20. The function
 $D( {\dot x} )$
is symmetric about the origin. For
$D( {\dot x} )$
is symmetric about the origin. For
 $n = 1$
, the graph is a straight line, indicating that the control system reduces to linear admittance control. As
$n = 1$
, the graph is a straight line, indicating that the control system reduces to linear admittance control. As
 $n \gt 1$
, the curve steepens with increasing velocity, suggesting that when the system experiences a large external force impact, the damping force correspondingly increases to dissipate energy and maintain stability in human–robot interaction. It is important to note that while this effect becomes more pronounced with higher values of
$n \gt 1$
, the curve steepens with increasing velocity, suggesting that when the system experiences a large external force impact, the damping force correspondingly increases to dissipate energy and maintain stability in human–robot interaction. It is important to note that while this effect becomes more pronounced with higher values of
 $n$
, excessively high values may not always yield optimal performance.
$n$
, excessively high values may not always yield optimal performance.
2.3. Limitations of designing virtual dynamics controller based on SFC
As previously mentioned, while LAC struggles to differentiate between traction and impact forces and effectively counter random impacts, the SFC successfully addresses these challenges. However, the SFC approach presents several limitations that require further investigation.

Figure 3.
Three phases of typical STFs and relevant parameters of its piecewise model. The X-axis represents shear rate
 $\dot \gamma$
, while the Y-axis represents apparent viscosity
$\dot \gamma$
, while the Y-axis represents apparent viscosity
 $\eta$
.
$\eta$
.

Figure 4.
Comparison of the effects of nonlinear damping forces in the ISFC and SFC with parameters
 $\mu {\textrm { = }}1$
,
$\mu {\textrm { = }}1$
,
 $n = 3$
, and
$n = 3$
, and
 ${\eta _0} = 5$
.
${\eta _0} = 5$
.
One issue with the SFC system is its delayed response when halting movement after the removal of traction force, which compromises the robot’s ability to stop promptly in response to operator commands. Figure 2 illustrates nonlinear damping force behavior (
 $n \gt 1$
) at low system velocities (
$n \gt 1$
) at low system velocities (
 $\dot x \lt 1$
). The damping force significantly decreases as system speed diminishes, nearing negligible levels as velocity approaches zero. This effect is exacerbated with increasing values of
$\dot x \lt 1$
). The damping force significantly decreases as system speed diminishes, nearing negligible levels as velocity approaches zero. This effect is exacerbated with increasing values of
 $n$
. Consequently, the system continues to move after traction force is removed, owing to the notably reduced energy dissipation capability of the SFC’s near-zero damping term. This limitation adversely affects controller performance in pHRC, undermining the precise execution of operator-intended movements and potentially threatening the safety of both operators and robots. Further simulations and experiments will explore this phenomenon in detail.
$n$
. Consequently, the system continues to move after traction force is removed, owing to the notably reduced energy dissipation capability of the SFC’s near-zero damping term. This limitation adversely affects controller performance in pHRC, undermining the precise execution of operator-intended movements and potentially threatening the safety of both operators and robots. Further simulations and experiments will explore this phenomenon in detail.
Additionally, SFC is incompatible with dual-arm robot collaborative control algorithms, complicating its application in such systems. Precise task execution in dual-arm robots relies heavily on the relative positions and orientations of the end effectors. As noted, SFC-equipped robots cannot immediately halt after traction force is removed. This limitation hinders the ability to meet the stringent precision control requirements of dual-arm systems. For instance, when a human collaborates with dual-arm robots in material handling tasks, unintentional robotic movements can accumulate, significantly impairing system stability and potentially resulting in task failure.
This paper proposes an improvement to the existing SFC algorithm by incorporating the shear-thinning properties of shear-thickening fluids to address the aforementioned issues. This characteristic allows the system to maintain a certain level of nonlinear damping at low speeds, enabling the robot to quickly stop moving when traction is removed, thereby preserving system stability.
3. The design and safety validation of the ISFC
3.1. Design of the ISFC
As discussed earlier, the traditional SFC algorithm only considers the fluid characteristics during shear thickening, resulting in insufficient performance of the controller at low shear rates. According to ref. [Reference Li, Lyu, Yuan, Dong and Dai25], the apparent viscosity of STFs exhibits three distinct zones as the shear rate increases: (1) shear thinning, (2) shear thickening, and (3) shear thinning again, as illustrated in Figure 3. In the initial phase
 $\left ( {\dot \gamma \le {{\dot \gamma }_c}} \right )$
, as the shear rate increases, the STFs system exhibits shear-thinning behavior, causing the apparent viscosity to decrease from the initial value
$\left ( {\dot \gamma \le {{\dot \gamma }_c}} \right )$
, as the shear rate increases, the STFs system exhibits shear-thinning behavior, causing the apparent viscosity to decrease from the initial value
 $\eta _0$
to the minimum value
$\eta _0$
to the minimum value
 $\eta _c$
. In the intermediate phase
$\eta _c$
. In the intermediate phase
 $\left ( {{{\dot \gamma }_c} \le \dot \gamma \le {{\dot \gamma }_{\max }}} \right )$
, as the shear rate continues to increase, the fluid exhibits shear thickening behavior, causing the apparent viscosity to reach its peak value
$\left ( {{{\dot \gamma }_c} \le \dot \gamma \le {{\dot \gamma }_{\max }}} \right )$
, as the shear rate continues to increase, the fluid exhibits shear thickening behavior, causing the apparent viscosity to reach its peak value
 $\eta _{\max }$
. Finally, in the third phase
$\eta _{\max }$
. Finally, in the third phase
 $\left ( {\dot \gamma \ge {{\dot \gamma }_{\max }}} \right )$
, the apparent viscosity decreases dramatically. This paper argues that, in the low shear rate range, the SFC algorithm should account for the shear-thinning effect and the corresponding changes in apparent viscosity from a specific initial viscosity value.
$\left ( {\dot \gamma \ge {{\dot \gamma }_{\max }}} \right )$
, the apparent viscosity decreases dramatically. This paper argues that, in the low shear rate range, the SFC algorithm should account for the shear-thinning effect and the corresponding changes in apparent viscosity from a specific initial viscosity value.
The constitutive equation for Zone II of STFs can be modeled using the power-law model [Reference Wei, Lin and Sun24]:
 \begin{equation} \tau = \left ( {\mu {{\left | {\dot \gamma } \right |}^{n - 1}} + a} \right )\dot \gamma \end{equation}
\begin{equation} \tau = \left ( {\mu {{\left | {\dot \gamma } \right |}^{n - 1}} + a} \right )\dot \gamma \end{equation}
where
 $\tau$
represents the stress tensor,
$\tau$
represents the stress tensor,
 $\eta = \mu {\left | {\dot \gamma } \right |^{n - 1}} + a$
denotes the apparent viscosity,
$\eta = \mu {\left | {\dot \gamma } \right |^{n - 1}} + a$
denotes the apparent viscosity,
 $\mu$
is a material-dependent constant,
$\mu$
is a material-dependent constant,
 $a$
is a curve adjustment parameter,
$a$
is a curve adjustment parameter,
 $\dot \gamma$
is the shear rate, and
$\dot \gamma$
is the shear rate, and
 $n$
is the power-law index
$n$
is the power-law index
 $\left ( {n \gt 1} \right )$
.
$\left ( {n \gt 1} \right )$
.
Inspired by the constitutive Eq. (6), the shear thickening behavior is applied to the nonlinear damping term of the controller.
 $\dot \gamma$
and
$\dot \gamma$
and
 $\tau$
are replaced by
$\tau$
are replaced by
 $\dot x$
and
$\dot x$
and
 $D( {\dot x} )$
, respectively. Based on the shear thinning characteristics of the fluid in Zone I of Figure 3, the adjustment parameter
$D( {\dot x} )$
, respectively. Based on the shear thinning characteristics of the fluid in Zone I of Figure 3, the adjustment parameter
 $a$
is further defined as
$a$
is further defined as
 $a = {\eta _0}{e^{ - | {\dot x} |}}$
. The dynamic equation of the controller’s viscosity term, modeled using the improved shear-thickening fluid, is given by:
$a = {\eta _0}{e^{ - | {\dot x} |}}$
. The dynamic equation of the controller’s viscosity term, modeled using the improved shear-thickening fluid, is given by:
 \begin{equation} D( {\dot x} ) = \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x \end{equation}
\begin{equation} D( {\dot x} ) = \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x \end{equation}
Combining Eq. (7) with Eq. (5), the proposed ISFC can be expressed as:
 \begin{equation} \left \{ \begin{array}{l} m\ddot x + \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot {\bar {x}}= \lambda \dot x\\[3pt]\bar x = \int {\dot {\bar {x}} dt} \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} m\ddot x + \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot {\bar {x}}= \lambda \dot x\\[3pt]\bar x = \int {\dot {\bar {x}} dt} \end{array} \right . \end{equation}
where
 $D( {\dot x} ) = \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x$
denotes the nonlinear damping term.
$D( {\dot x} ) = \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x$
denotes the nonlinear damping term.
 ${\eta _0} \gt 0$
is the initial value of the apparent viscosity when the fluid undergoes shear thinning behavior,
${\eta _0} \gt 0$
is the initial value of the apparent viscosity when the fluid undergoes shear thinning behavior,
 $\lambda$
is a gain term used to regulate the system output, and
$\lambda$
is a gain term used to regulate the system output, and
 $\bar {x}$
is the output of the ISFC.
$\bar {x}$
is the output of the ISFC.
The nonlinear damping term is derived from the constitutive equation of the fluid and incorporates two key components. First,
 $\mu { | {\dot x} |^{n - 1}}$
represents a power-law model of apparent viscosity, characterizing the shear-thickening behavior of the fluid. This model enables the system to replicate the dynamic properties of STFs, ensuring both compliance and resilience against impacts. Second,
$\mu { | {\dot x} |^{n - 1}}$
represents a power-law model of apparent viscosity, characterizing the shear-thickening behavior of the fluid. This model enables the system to replicate the dynamic properties of STFs, ensuring both compliance and resilience against impacts. Second,
 ${\eta _0}{e^{ - | {\dot x} |}}$
accounts for viscosity variations, specifically modeling the shear-thinning behavior observed in Zone I of Figure 3. This modification addresses the limitation of inadequate damping force at low velocities, mitigating unpredictable movements in the system when the traction force from a human operator is withdrawn. Figure 4 presents a comparative analysis of the nonlinear damping terms between the proposed ISFC algorithm and the conventional SFC, with the parameter
${\eta _0}{e^{ - | {\dot x} |}}$
accounts for viscosity variations, specifically modeling the shear-thinning behavior observed in Zone I of Figure 3. This modification addresses the limitation of inadequate damping force at low velocities, mitigating unpredictable movements in the system when the traction force from a human operator is withdrawn. Figure 4 presents a comparative analysis of the nonlinear damping terms between the proposed ISFC algorithm and the conventional SFC, with the parameter
 $n$
set to 3. It can be observed that, within the velocity range close to zero (from −1.3 to 1.3), ISFC generates a higher damping force compared to SFC. This indicates that when the human collaborator withdraws the traction force, the proposed ISFC algorithm can dissipate the remaining energy of the system more rapidly, allowing the robot to comply with the human’s intentions and reach the desired position.
$n$
set to 3. It can be observed that, within the velocity range close to zero (from −1.3 to 1.3), ISFC generates a higher damping force compared to SFC. This indicates that when the human collaborator withdraws the traction force, the proposed ISFC algorithm can dissipate the remaining energy of the system more rapidly, allowing the robot to comply with the human’s intentions and reach the desired position.
The gain parameter
 $\lambda$
is introduced to scale the velocity output according to the robot’s operational constraints and human comfort levels, ensuring safe interaction velocities while maintaining system responsiveness.
$\lambda$
is introduced to scale the velocity output according to the robot’s operational constraints and human comfort levels, ensuring safe interaction velocities while maintaining system responsiveness.
3.2. Safety validation of the ISFC
The ISFC exhibits several essential properties – nonlinear velocity ratio, stability, and passivity – that ensure its practical applicability in robotic systems. The key characteristics are detailed as follows:
(1) Property 1: Nonlinear spatial velocity ratio.
Proof.
In the phase plane of a nonlinear system [Reference Slotine and Li26], the dynamics of the system in Eq. (8) can be represented as:
 \begin{equation} \left \{ \begin{array}{l} {{\dot p}_1} = {p_2}\\[3pt] {{\dot p}_2} = \frac {{ - \left ( {\mu {{\left | {{p_2}} \right |}^{n - 1}} + {\eta _0}{e^{ - \left | {{p_2}} \right |}}} \right ){p_2}}}{m} \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} {{\dot p}_1} = {p_2}\\[3pt] {{\dot p}_2} = \frac {{ - \left ( {\mu {{\left | {{p_2}} \right |}^{n - 1}} + {\eta _0}{e^{ - \left | {{p_2}} \right |}}} \right ){p_2}}}{m} \end{array} \right . \end{equation}
where
 $p_1$
represents the position state and
$p_1$
represents the position state and
 $p_2$
the velocity state within the phase plane.
$p_2$
the velocity state within the phase plane.
The spatial velocity ratio of the phase trajectory is given by:
 \begin{equation} {R_{sv}} = \frac {{d{p_2}}}{{dt}}\frac {{dt}}{{d{p_1}}} = \frac {{{{\dot p}_2}}}{{{{\dot p}_1}}} = - \frac {{\mu {{\left | {{p_2}} \right |}^{n - 1}} + {\eta _0}{e^{ - \left | {{p_2}} \right |}}}}{m}. \end{equation}
\begin{equation} {R_{sv}} = \frac {{d{p_2}}}{{dt}}\frac {{dt}}{{d{p_1}}} = \frac {{{{\dot p}_2}}}{{{{\dot p}_1}}} = - \frac {{\mu {{\left | {{p_2}} \right |}^{n - 1}} + {\eta _0}{e^{ - \left | {{p_2}} \right |}}}}{m}. \end{equation}
From this equation, it is evident that when the velocity
 $p_2$
exceeds 1, the relative magnitude of the spatial velocity ratio of a linear ISFC system (
$p_2$
exceeds 1, the relative magnitude of the spatial velocity ratio of a linear ISFC system (
 $n=1$
) and a nonlinear ISFC system (
$n=1$
) and a nonlinear ISFC system (
 $n\gt 1$
) can be expressed as:
$n\gt 1$
) can be expressed as:
 \begin{equation} {R_{sv}}\left | {_{{p_2} \ge 1,n \gt 1}} \right . \ge {R_{sv}}\left | {_{{p_2} \ge 1,n{\textrm { = }}1}} \right . \end{equation}
\begin{equation} {R_{sv}}\left | {_{{p_2} \ge 1,n \gt 1}} \right . \ge {R_{sv}}\left | {_{{p_2} \ge 1,n{\textrm { = }}1}} \right . \end{equation}
Thus, when the velocity is high (
 $p_2 \ge 1$
), the spatial velocity of the nonlinear system (
$p_2 \ge 1$
), the spatial velocity of the nonlinear system (
 $n\gt 1$
) is greater than that of the linear system (
$n\gt 1$
) is greater than that of the linear system (
 $n=1$
).
$n=1$
).
The spatial velocity ratio primarily investigates the convergence behavior of position and velocity states in the free motion stage. A larger nonlinear spatial velocity ratio indicates that the rate of change of velocity state (
 ${d{p_2}} \mathord { /{\vphantom {{d{p_2}} {dt}}} .} {dt}$
) is relatively faster than the rate of change of position state (
${d{p_2}} \mathord { /{\vphantom {{d{p_2}} {dt}}} .} {dt}$
) is relatively faster than the rate of change of position state (
 ${{d{p_1}} \mathord { /{\vphantom {{d{p_1}} {dt}}} .} {dt}}$
) at a given point on the phase trajectory, which can ensure the stability of the system in the free state without external forces.
${{d{p_1}} \mathord { /{\vphantom {{d{p_1}} {dt}}} .} {dt}}$
) at a given point on the phase trajectory, which can ensure the stability of the system in the free state without external forces.
(2) Property 2: Stability.
Proof.
Consider the system described by Eq. (8), assuming that
 $m \gt 0$
,
$m \gt 0$
,
 $\mu \gt 0$
,
$\mu \gt 0$
,
 $n \gt 0$
, and
$n \gt 0$
, and
 ${\eta _0} \gt 0$
and a constant input force
${\eta _0} \gt 0$
and a constant input force
 $f_{{\textrm {ext}}}$
. Under these conditions, the system has a unique equilibrium point, which is globally asymptotically stable.
$f_{{\textrm {ext}}}$
. Under these conditions, the system has a unique equilibrium point, which is globally asymptotically stable.
Define:
 \begin{equation} f ( {\dot p} ) = \left ( {\mu {{ | {\dot p} |}^{n - 1}} + {\eta _0}e^{ { - | {\dot p} |}}} \right )\dot p \end{equation}
\begin{equation} f ( {\dot p} ) = \left ( {\mu {{ | {\dot p} |}^{n - 1}} + {\eta _0}e^{ { - | {\dot p} |}}} \right )\dot p \end{equation}
Since
 $f\left ( { - \dot p} \right ) = - f ( {\dot p} )$
,
$f\left ( { - \dot p} \right ) = - f ( {\dot p} )$
,
 $f$
is an odd-symmetric function. The derivative of
$f$
is an odd-symmetric function. The derivative of
 $f ( {\dot p} )$
with respect to
$f ( {\dot p} )$
with respect to
 $\dot p$
is:
$\dot p$
is:
 \begin{equation} f'(\dot {p}) = \mu n |\dot {p}|^{n-1} + ( 1 - |\dot {p}| ) {\eta _0} e^{-|\dot {p}|} \end{equation}
\begin{equation} f'(\dot {p}) = \mu n |\dot {p}|^{n-1} + ( 1 - |\dot {p}| ) {\eta _0} e^{-|\dot {p}|} \end{equation}
In deriving Eq. (13), careful consideration is given to the piecewise nature of the absolute value function
 $ |\dot {p}|$
. For
$ |\dot {p}|$
. For
 $ \dot {p} \geq 0$
, we have
$ \dot {p} \geq 0$
, we have
 $ |\dot {p}| = \dot {p}$
and
$ |\dot {p}| = \dot {p}$
and
 $ \frac {d}{d\dot {p}}|\dot {p}| = 1$
. For
$ \frac {d}{d\dot {p}}|\dot {p}| = 1$
. For
 $ \dot {p} \lt 0$
, we have
$ \dot {p} \lt 0$
, we have
 $ |\dot {p}| = -\dot {p}$
and
$ |\dot {p}| = -\dot {p}$
and
 $ \frac {d}{d\dot {p}}|\dot {p}| = -1$
. The derivation is first performed for the case
$ \frac {d}{d\dot {p}}|\dot {p}| = -1$
. The derivation is first performed for the case
 $ \dot {p} \geq 0$
and then extended to the entire domain using the odd symmetry property
$ \dot {p} \geq 0$
and then extended to the entire domain using the odd symmetry property
 $ f(-\dot {p}) = -f(\dot {p})$
, which ensures the derivative
$ f(-\dot {p}) = -f(\dot {p})$
, which ensures the derivative
 $ f'(\dot {p})$
is well-defined and positive under the given conditions for all
$ f'(\dot {p})$
is well-defined and positive under the given conditions for all
 $ \dot {p} \in \mathbb{R}$
.
$ \dot {p} \in \mathbb{R}$
.
We partition the domain into two intervals and analyze the strict positivity of
 $ f'(\dot {p})$
in each. For
$ f'(\dot {p})$
in each. For
 $ |\dot {p}| \leq 1$
, both terms in
$ |\dot {p}| \leq 1$
, both terms in
 $ f'(\dot {p}) = \mu n |\dot {p}|^{n-1} + (1 - |\dot {p}|) \eta _0 e^{-|\dot {p}|}$
are non-negative:
$ f'(\dot {p}) = \mu n |\dot {p}|^{n-1} + (1 - |\dot {p}|) \eta _0 e^{-|\dot {p}|}$
are non-negative:
 $ \mu n |\dot {p}|^{n-1} \geq 0$
due to
$ \mu n |\dot {p}|^{n-1} \geq 0$
due to
 $ \mu , n \gt 0$
, and
$ \mu , n \gt 0$
, and
 $ (1 - |\dot {p}|) \eta _0 e^{-|\dot {p}|} \geq 0$
since
$ (1 - |\dot {p}|) \eta _0 e^{-|\dot {p}|} \geq 0$
since
 $ |\dot {p}| \leq 1$
. At
$ |\dot {p}| \leq 1$
. At
 $ \dot {p} = 0$
,
$ \dot {p} = 0$
,
 $ f'(0) = \eta _0 \gt 0$
; for
$ f'(0) = \eta _0 \gt 0$
; for
 $ 0 \lt |\dot {p}| \leq 1$
, the sum remains strictly positive as both terms cannot vanish simultaneously. For
$ 0 \lt |\dot {p}| \leq 1$
, the sum remains strictly positive as both terms cannot vanish simultaneously. For
 $ |\dot {p}| \gt 1$
, define
$ |\dot {p}| \gt 1$
, define
 $ t = |\dot {p}|$
and rewrite
$ t = |\dot {p}|$
and rewrite
 $ f'(\dot {p}) \geq \mu n t^{n-1} - \eta _0 t e^{-t}$
(since
$ f'(\dot {p}) \geq \mu n t^{n-1} - \eta _0 t e^{-t}$
(since
 $ 1 - t \geq -t$
). The auxiliary function
$ 1 - t \geq -t$
). The auxiliary function
 $ g(t) = \mu n t^{n-1} - \eta _0 t e^{-t}$
satisfies
$ g(t) = \mu n t^{n-1} - \eta _0 t e^{-t}$
satisfies
 $ \lim _{t \to \infty } g(t) = +\infty$
due to exponential dominance (
$ \lim _{t \to \infty } g(t) = +\infty$
due to exponential dominance (
 $ \lim _{t \to \infty } \frac {\mu n t^{n-1}}{\eta _0 t e^{-t}} = +\infty$
). Its derivative
$ \lim _{t \to \infty } \frac {\mu n t^{n-1}}{\eta _0 t e^{-t}} = +\infty$
). Its derivative
 $ g'(t) = \mu n(n-1)t^{n-2} + \eta _0 (t-1) e^{-t}$
is positive for
$ g'(t) = \mu n(n-1)t^{n-2} + \eta _0 (t-1) e^{-t}$
is positive for
 $ t \gt 1$
because
$ t \gt 1$
because
 $ \mu n(n-1)t^{n-2} \gt 0$
and
$ \mu n(n-1)t^{n-2} \gt 0$
and
 $ \eta _0 (t-1) e^{-t} \gt 0$
, rendering
$ \eta _0 (t-1) e^{-t} \gt 0$
, rendering
 $ g(t)$
strictly increasing. At the boundary
$ g(t)$
strictly increasing. At the boundary
 $ t = 1$
,
$ t = 1$
,
 $ g(1) = \mu n - \eta _0/e$
, which is positive if
$ g(1) = \mu n - \eta _0/e$
, which is positive if
 $ \mu n \gt \eta _0/e$
. Consequently,
$ \mu n \gt \eta _0/e$
. Consequently,
 $ g(t) \gt 0$
for all
$ g(t) \gt 0$
for all
 $ t \gt 1$
, ensuring
$ t \gt 1$
, ensuring
 $ f'(\dot {p}) \gt 0$
globally under this condition. By virtue of the strict monotonicity of
$ f'(\dot {p}) \gt 0$
globally under this condition. By virtue of the strict monotonicity of
 $f(\dot {p})$
established above, there exists a unique solution
$f(\dot {p})$
established above, there exists a unique solution
 $\dot {p^\ast }$
for any constant external force input
$\dot {p^\ast }$
for any constant external force input
 $f_{\mathrm{ext}}$
.
$f_{\mathrm{ext}}$
.
By defining a new variable
 $s = \dot p - {\dot p^*}$
, the equilibrium point is shifted to the origin, and the system becomes:
$s = \dot p - {\dot p^*}$
, the equilibrium point is shifted to the origin, and the system becomes:
 \begin{equation} m\dot s + \left ( {\mu {{ | s |}^{n - 1}} + {\eta _0}{e^{ - | s |}}} \right )s = 0 \end{equation}
\begin{equation} m\dot s + \left ( {\mu {{ | s |}^{n - 1}} + {\eta _0}{e^{ - | s |}}} \right )s = 0 \end{equation}
Consider the Lyapunov function:
 \begin{equation} V(s) = {s^2} \end{equation}
\begin{equation} V(s) = {s^2} \end{equation}
The derivative of
 $V$
along the system trajectory is:
$V$
along the system trajectory is:
 \begin{equation} \dot V(s) = - \frac {{2\left ( {\mu {{| s|}^{n - 1}} + {\eta _0}{e^{ - | s |}}} \right ){s^2}}}{m} \end{equation}
\begin{equation} \dot V(s) = - \frac {{2\left ( {\mu {{| s|}^{n - 1}} + {\eta _0}{e^{ - | s |}}} \right ){s^2}}}{m} \end{equation}
Since
 $m \gt 0$
,
$m \gt 0$
,
 $\mu \gt 0$
,
$\mu \gt 0$
,
 $n \gt 0$
,
$n \gt 0$
,
 ${\eta _0} \gt 0$
, it can be seen that
${\eta _0} \gt 0$
, it can be seen that
 $\dot V (s)$
is negative definite. By Lyapunov’s stability theorem, the system is globally asymptotically stable.
$\dot V (s)$
is negative definite. By Lyapunov’s stability theorem, the system is globally asymptotically stable.
The ISFC must ensure that the robot’s speed tracking is stable, enabling the robot to perform tasks such as human–robot collaboration involving dragging.
Stability ensures that the robot’s movements remain consistent and controlled, even during tasks involving human–robot interaction and continuous external forces.
(3) Property 3: Passivity.
The stability of ISFC under constant external forces has been analyzed. To evaluate stability under other external force disturbances, energy dissipation must be considered. The passivity of the ISFC ensures the system does not accumulate energy uncontrollably, thereby enhancing reliability.
Proof.
Define a Lyapunov-like function:
 \begin{equation} \dot {U}(\dot {p}) = \frac {1}{2} m \ \dot {p}^2 \end{equation}
\begin{equation} \dot {U}(\dot {p}) = \frac {1}{2} m \ \dot {p}^2 \end{equation}
The system’s power form is expressed as:
 \begin{equation} \frac {d}{{dt}}\left ( {\dot U( {\dot x} )} \right ) = \dot x{f_{ext}} - h( {\dot x} ) \end{equation}
\begin{equation} \frac {d}{{dt}}\left ( {\dot U( {\dot x} )} \right ) = \dot x{f_{ext}} - h( {\dot x} ) \end{equation}
where
 $h( {\dot x} ) = \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right ){\dot x^2}$
represents the dissipated power. Since
$h( {\dot x} ) = \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right ){\dot x^2}$
represents the dissipated power. Since
 $h( {\dot x} ) \ge 0$
and
$h( {\dot x} ) \ge 0$
and
 ${1 \mathord {\left / {\vphantom {1 2}} \right . } 2}m{\dot x^2}$
has a lower bound, the system is dissipative. Furthermore, the non-negative dissipation term confirms that the system is passive.
${1 \mathord {\left / {\vphantom {1 2}} \right . } 2}m{\dot x^2}$
has a lower bound, the system is dissipative. Furthermore, the non-negative dissipation term confirms that the system is passive.
During human–robot collaboration, disturbances or transitions from non-contact to contact states can occur. The passivity of ISFC ensures that external forces are dissipated, maintaining stability and safety.
3.3. Discretization of the ISFC
The ISFC discussed previously operates in continuous time; however, in practical applications, the constraints of hardware and software often necessitate the use of discrete time parameters. The discretized ISFC can be represented as follows:
 \begin{equation} \left \{ \begin{array}{l} \ddot x\left ( t \right ) = {m^{ - 1}}\left ( {{f_{ext}}\left ( t \right ) - D\left ( {\dot x\left ( {t - \Delta t} \right )} \right )} \right )\\[3pt] \dot {\bar x}\left ( t \right ) = \lambda \left ( {\dot x\left ( {t - \Delta t} \right ) + \ddot x\left ( t \right )\Delta t} \right )\\[3pt] \bar x\left ( t \right ) = x\left ( {t - \Delta t} \right ) + \dot { \bar x}\left ( t \right )\Delta t \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} \ddot x\left ( t \right ) = {m^{ - 1}}\left ( {{f_{ext}}\left ( t \right ) - D\left ( {\dot x\left ( {t - \Delta t} \right )} \right )} \right )\\[3pt] \dot {\bar x}\left ( t \right ) = \lambda \left ( {\dot x\left ( {t - \Delta t} \right ) + \ddot x\left ( t \right )\Delta t} \right )\\[3pt] \bar x\left ( t \right ) = x\left ( {t - \Delta t} \right ) + \dot { \bar x}\left ( t \right )\Delta t \end{array} \right . \end{equation}
where
 $\Delta t$
denotes the sampling time of the system, and the term
$\Delta t$
denotes the sampling time of the system, and the term
 $D\left ( \dot {x}(t - \Delta t) \right )$
is defined as:
$D\left ( \dot {x}(t - \Delta t) \right )$
is defined as:
 \begin{equation*} \left ( \mu \left | \dot {x}(t - \Delta t) \right |^{n - 1} + \eta _0 e^{-\left | \dot {x}(t - \Delta t) \right |} \right ) \dot {x}(t - \Delta t) \end{equation*}
\begin{equation*} \left ( \mu \left | \dot {x}(t - \Delta t) \right |^{n - 1} + \eta _0 e^{-\left | \dot {x}(t - \Delta t) \right |} \right ) \dot {x}(t - \Delta t) \end{equation*}
By iterating Eq. (19) over discrete time steps, the discretized ISFC can compute the robot input
 $\bar x\left ( t \right )$
at each step based on the current system state
$\bar x\left ( t \right )$
at each step based on the current system state
 $\ddot x\left ( t \right )$
and past information
$\ddot x\left ( t \right )$
and past information
 $ \dot {x}(t - \Delta t)$
. This approach facilitates the implementation of the controller in practical robot control systems with discrete-time updates.
$ \dot {x}(t - \Delta t)$
. This approach facilitates the implementation of the controller in practical robot control systems with discrete-time updates.
4. Human-dual-arm robot collaboration framework based on ISFC
In this section, a human-dual-arm robot collaboration (HDRC) control framework is proposed, which integrates the ISFC algorithm into a dual-arm robot system. This framework facilitates the coordination between the dual-arm robot and the human operator to accomplish collaborative tasks. Unlike other studies that focus on force distribution in dual-arm and cooperative operations, the method presented here relies exclusively on natural force distribution, eliminating the need for specific force decomposition techniques.
To align the two robots with human intentions and maintain the pose relationship, we propose an HDRC control framework based on ISFC (Figure 5). This framework is designed to coordinate the asynchronous and unequal motions of the two robots, ensuring that their actions align with the operator’s intent. Initially, the net force of the system is decomposed into the components
 ${\textbf {f}}_{{\textrm {ext1}}}$
and
${\textbf {f}}_{{\textrm {ext1}}}$
and
 ${\textbf {f}}_{{\textrm {ext2}}}$
of the two robots, a process that does not necessitate precise modeling or control. Additionally, the component forces are converted into incremental poses
${\textbf {f}}_{{\textrm {ext2}}}$
of the two robots, a process that does not necessitate precise modeling or control. Additionally, the component forces are converted into incremental poses
 ${\bar {\textbf{x}}}_{\boldsymbol{1}}$
and
${\bar {\textbf{x}}}_{\boldsymbol{1}}$
and
 ${\bar {\textbf{x}}}_{\boldsymbol{2}}$
via the ISFC virtual dynamics model, where
${\bar {\textbf{x}}}_{\boldsymbol{2}}$
via the ISFC virtual dynamics model, where
 ${\bar {\textbf{x}}} = \left [ {\;\begin{array}{*{20}{c}} {\bar {\textbf{x}}'}&{\bar {\textbf{x}}''} \end{array}\;} \right ] = \left [ {\begin{array}{*{20}{l}} x&y&z&{Rx}&{Ry}&{Rz} \end{array}} \right ]$
represents the
${\bar {\textbf{x}}} = \left [ {\;\begin{array}{*{20}{c}} {\bar {\textbf{x}}'}&{\bar {\textbf{x}}''} \end{array}\;} \right ] = \left [ {\begin{array}{*{20}{l}} x&y&z&{Rx}&{Ry}&{Rz} \end{array}} \right ]$
represents the
 $(6 \times 1)$
pose vectors.
$(6 \times 1)$
pose vectors.

Figure 5.
A cooperative control framework for physical human-dual-arm robots based on ISFC, where
 ${\bar {\textbf{x}}}_i$
(virtual dynamic output) is fed into the HDRC module to compute
${\bar {\textbf{x}}}_i$
(virtual dynamic output) is fed into the HDRC module to compute
 ${\hat {\textbf{x}}}_i$
(incremental pose).
${\hat {\textbf{x}}}_i$
(incremental pose).
In this framework, we distinguish between two key concepts:
Virtual dynamic outputs:
 $(\bar {\textbf {x}}_1, \bar {\textbf {x}}_2)$
denote the raw pose adjustments generated by the ISFC controller based on external forces (Eq. 8). These outputs simulate the physical behavior of shear-thickening fluids, translating
$(\bar {\textbf {x}}_1, \bar {\textbf {x}}_2)$
denote the raw pose adjustments generated by the ISFC controller based on external forces (Eq. 8). These outputs simulate the physical behavior of shear-thickening fluids, translating
 $\textbf {f}_{\text{ext},i}$
into unprocessed Cartesian space displacements.
$\textbf {f}_{\text{ext},i}$
into unprocessed Cartesian space displacements.
Incremental poses:
 $(\hat {\textbf {x}}_1, \hat {\textbf {x}}_2)$
represent the final coordinated commands sent to the robots. They are derived by combining virtual dynamic outputs
$(\hat {\textbf {x}}_1, \hat {\textbf {x}}_2)$
represent the final coordinated commands sent to the robots. They are derived by combining virtual dynamic outputs
 $\bar {\textbf {x}}_1, \bar {\mathbf{x}}_2$
with dual-arm synchronization logic and the reference trajectory (Eqs. 20 and 21), ensuring cooperative motion between manipulators.
$\bar {\textbf {x}}_1, \bar {\mathbf{x}}_2$
with dual-arm synchronization logic and the reference trajectory (Eqs. 20 and 21), ensuring cooperative motion between manipulators.
The core of the framework is the HDRC control module, which facilitates the coordination of the two manipulators. When considering only positional synchronization, the module is defined as follows:
 \begin{equation} \left \{ \begin{array}{l} {{{\hat {\textbf{x}}'}}_{{1}}}\left ( {\textrm {t}} \right ) = {{{\bar {\textbf{x}}'}}_{{1}}}\left ( {\textrm {t}} \right ) + \;{}_{{{\textrm {B}}_{\textrm {1}}}}^{{{\textrm {E}}_{\textrm {1}}}}{\textbf {R}}\;{}_{\textrm {W}}^{{{\textrm {B}}_{\textrm {1}}}}{\textbf {R}}\;{}_{{{\textrm {B}}_{{2}}}}^{\textrm {W}}{\textbf {R}}\;{}_{{{\textrm {E}}_{\textrm {2}}}}^{{{\textrm {B}}_{{2}}}}{\textbf {R}}\;\;{{{\bar {\textbf{x}}'}}_{{2}}}\left ( {{\textrm {t} - \Delta \textrm {t} }} \right )+ {{{\bar {\textbf{x}}'}}_{\textrm {r1}}}\\[3pt] {{{\hat {\textbf{x}}'}}_{{2}}}\left ( {\textrm {t}} \right ) = {{{\bar {\textbf{x}}'}}_{{2}}}\left ( {\textrm {t}} \right ) + \;{}_{{{\textrm {B}}_{\textrm {2}}}}^{{{\textrm {E}}_{\textrm {2}}}}{\textbf {R}}\;{}_{\textrm {W}}^{{{\textrm {B}}_{\textrm {2}}}}{\textbf {R}}\;{}_{{{\textrm {B}}_{{1}}}}^{\textrm {W}}{\textbf {R}}\;{}_{{{\textrm {E}}_{\textrm {1}}}}^{{{\textrm {B}}_{{1}}}}{\textbf {R}}\;{{{\bar {\textbf{x}}'}}_{{1}}}\left ( {{\textrm {t} - \Delta \textrm {t}}} \right )+ {{{\bar {\textbf{x}}'}}_{\textrm {r2}}} \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} {{{\hat {\textbf{x}}'}}_{{1}}}\left ( {\textrm {t}} \right ) = {{{\bar {\textbf{x}}'}}_{{1}}}\left ( {\textrm {t}} \right ) + \;{}_{{{\textrm {B}}_{\textrm {1}}}}^{{{\textrm {E}}_{\textrm {1}}}}{\textbf {R}}\;{}_{\textrm {W}}^{{{\textrm {B}}_{\textrm {1}}}}{\textbf {R}}\;{}_{{{\textrm {B}}_{{2}}}}^{\textrm {W}}{\textbf {R}}\;{}_{{{\textrm {E}}_{\textrm {2}}}}^{{{\textrm {B}}_{{2}}}}{\textbf {R}}\;\;{{{\bar {\textbf{x}}'}}_{{2}}}\left ( {{\textrm {t} - \Delta \textrm {t} }} \right )+ {{{\bar {\textbf{x}}'}}_{\textrm {r1}}}\\[3pt] {{{\hat {\textbf{x}}'}}_{{2}}}\left ( {\textrm {t}} \right ) = {{{\bar {\textbf{x}}'}}_{{2}}}\left ( {\textrm {t}} \right ) + \;{}_{{{\textrm {B}}_{\textrm {2}}}}^{{{\textrm {E}}_{\textrm {2}}}}{\textbf {R}}\;{}_{\textrm {W}}^{{{\textrm {B}}_{\textrm {2}}}}{\textbf {R}}\;{}_{{{\textrm {B}}_{{1}}}}^{\textrm {W}}{\textbf {R}}\;{}_{{{\textrm {E}}_{\textrm {1}}}}^{{{\textrm {B}}_{{1}}}}{\textbf {R}}\;{{{\bar {\textbf{x}}'}}_{{1}}}\left ( {{\textrm {t} - \Delta \textrm {t}}} \right )+ {{{\bar {\textbf{x}}'}}_{\textrm {r2}}} \end{array} \right . \end{equation}
where
 $\left \{ \textrm {W} \right \}$
denotes the world frame,
$\left \{ \textrm {W} \right \}$
denotes the world frame,
 $\left \{ {{\textrm {B}_i}} \right \}$
and
$\left \{ {{\textrm {B}_i}} \right \}$
and
 $\left \{ {{\textrm {E}_i}} \right \}$
represent the base frame and end frame attached to robot
$\left \{ {{\textrm {E}_i}} \right \}$
represent the base frame and end frame attached to robot
 $i$
, respectively.
$i$
, respectively.
 $i=1,2$
indicates the
$i=1,2$
indicates the
 $i\ th$
manipulator.
$i\ th$
manipulator.
 ${}_{{B}}^{{A}}{\textbf {R}}$
represents rotation matrix of
${}_{{B}}^{{A}}{\textbf {R}}$
represents rotation matrix of
 $\left \{ \textrm {B} \right \}$
relative to the
$\left \{ \textrm {B} \right \}$
relative to the
 $\left \{ \textrm {A} \right \}$
, and
$\left \{ \textrm {A} \right \}$
, and
 $\Delta {\textrm {t}}$
signifies the sampling time. The vectors
$\Delta {\textrm {t}}$
signifies the sampling time. The vectors
 ${\hat {\textbf{x}}'}_i$
and
${\hat {\textbf{x}}'}_i$
and
 ${\bar {\textbf{x}}'}_i$
denote the
${\bar {\textbf{x}}'}_i$
denote the
 $\left ( {3 \times 1} \right )$
position vectors.
$\left ( {3 \times 1} \right )$
position vectors.
The orientation calculations cannot be treated as a direct superposition, unlike the method described in Eq. (20). Instead, they must be computed through rotational matrix multiplication, as expressed in the following formulation:
 \begin{equation} \left \{ \begin{array}{l} {\boldsymbol \Theta } \left ( {{{\hat {\textbf{x}}''}_1}\left ( {\textrm {t}} \right )} \right ) = {}_{{\textrm {E}_1}}^{{\textrm {B}_1}}\textbf {R} \cdot {\boldsymbol \Theta } \left ( {{{\bar {\textbf{x}}''}_1}\left ( {\textrm {t}} \right ) +{{{\bar {\textbf{x}}''}}_{\textrm {r1}}} + {}_{{\textrm {E}_2}}^{{\textrm {E}_1}}\textbf {R} \cdot {{\bar {\textbf{x}}''}_2}\left ( {{\textrm {t}} - \Delta \textrm {t}} \right )} \right )\\[3pt] {\boldsymbol \Theta } \left ( {{{\hat {\textbf{x}}''}_2}\left ( {\textrm {t}} \right )} \right ) = {}_{{\textrm {E}_2}}^{{\textrm {B}_2}}\textbf {R} \cdot {\boldsymbol \Theta } \left ( {{{\bar {\textbf{x}}''}_2}\left ( {\textrm {t}} \right ) +{{{\bar {\textbf{x}}''}}_{\textrm {r2}}} + {}_{{\textrm {E}_1}}^{{\textrm { E}_2}}\textbf {R} \cdot {{\bar {\textbf{x}}''}_1}\left ( {{\textrm {t}}- \Delta \textrm {t}} \right )} \right ) \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} {\boldsymbol \Theta } \left ( {{{\hat {\textbf{x}}''}_1}\left ( {\textrm {t}} \right )} \right ) = {}_{{\textrm {E}_1}}^{{\textrm {B}_1}}\textbf {R} \cdot {\boldsymbol \Theta } \left ( {{{\bar {\textbf{x}}''}_1}\left ( {\textrm {t}} \right ) +{{{\bar {\textbf{x}}''}}_{\textrm {r1}}} + {}_{{\textrm {E}_2}}^{{\textrm {E}_1}}\textbf {R} \cdot {{\bar {\textbf{x}}''}_2}\left ( {{\textrm {t}} - \Delta \textrm {t}} \right )} \right )\\[3pt] {\boldsymbol \Theta } \left ( {{{\hat {\textbf{x}}''}_2}\left ( {\textrm {t}} \right )} \right ) = {}_{{\textrm {E}_2}}^{{\textrm {B}_2}}\textbf {R} \cdot {\boldsymbol \Theta } \left ( {{{\bar {\textbf{x}}''}_2}\left ( {\textrm {t}} \right ) +{{{\bar {\textbf{x}}''}}_{\textrm {r2}}} + {}_{{\textrm {E}_1}}^{{\textrm { E}_2}}\textbf {R} \cdot {{\bar {\textbf{x}}''}_1}\left ( {{\textrm {t}}- \Delta \textrm {t}} \right )} \right ) \end{array} \right . \end{equation}
where
 ${\hat {\textbf{x}}''}_i$
and
${\hat {\textbf{x}}''}_i$
and
 ${\bar {\textbf{x}}''}_i$
denote the
${\bar {\textbf{x}}''}_i$
denote the
 $\left ( {3 \times 1} \right )$
orientation vectors, while
$\left ( {3 \times 1} \right )$
orientation vectors, while
 ${\boldsymbol \Theta }\left ( \cdot \right )$
represents the transformation relationship from roll-pitch-yaw angle to the rotation matrix.
${\boldsymbol \Theta }\left ( \cdot \right )$
represents the transformation relationship from roll-pitch-yaw angle to the rotation matrix.
The external force applied to two robots generates virtual dynamic outputs
 ${\bar {\textbf{x}}}_{{1}}$
and
${\bar {\textbf{x}}}_{{1}}$
and
 ${\bar {\textbf{x}}}_{{2}}$
via the ISFC controller. In the HDRC framework, the input
${\bar {\textbf{x}}}_{{2}}$
via the ISFC controller. In the HDRC framework, the input
 ${\bar {\textbf{x}}}_{{1}}$
is combined with
${\bar {\textbf{x}}}_{{1}}$
is combined with
 ${\bar {\textbf{x}}}_{{2}}$
to produce the input
${\bar {\textbf{x}}}_{{2}}$
to produce the input
 ${\hat {\textbf{x}}}_{{2}}$
for robot 2, utilizing both the delay module and the relative pose transformation module. The calculation process for robot 1 follows a similar approach. This methodology ensures a consistent compliance response of the dual-arm robot in response to external forces, maintaining the position and orientation relationship of the end-effectors.
${\hat {\textbf{x}}}_{{2}}$
for robot 2, utilizing both the delay module and the relative pose transformation module. The calculation process for robot 1 follows a similar approach. This methodology ensures a consistent compliance response of the dual-arm robot in response to external forces, maintaining the position and orientation relationship of the end-effectors.
The delayed superposition in Eqs. (20) and (21) implements a virtual mechanical coupling, where each arm responds to its partner’s prior state
 $t- \Delta t$
. This eliminates the explicit force distribution through pose feedback
$t- \Delta t$
. This eliminates the explicit force distribution through pose feedback
 ${}_{{\textrm {E}_2}}^{{\textrm {B}_2}}\textbf {R}$
transform, while reducing synchronization position errors (as shown in Figure 11f). The
${}_{{\textrm {E}_2}}^{{\textrm {B}_2}}\textbf {R}$
transform, while reducing synchronization position errors (as shown in Figure 11f). The
 $ \Delta t$
term accounts for communication latency, preserving system causality.
$ \Delta t$
term accounts for communication latency, preserving system causality.
The HDRC framework, as described by Eqs. (20) and (21), implements a virtual mechanical coupling between the dual arms through delayed pose superposition. To enhance the reproducibility of the proposed method, Algorithm1 details the real-time implementation of the integrated ISFC and HDRC control scheme, illustrating the computational sequence executed at each sampling interval.
Algorithm 1 Real-time ISFC + HDRC Control Loop

As shown in Algorithm1, the control loop begins with the ISFC discrete update (Eq. (19)) that converts external forces into virtual dynamic outputs. Subsequently, the HDRC module computes the final incremental poses by combining these outputs with delayed partner states through coordinate transformations. This approach ensures coordinated motion while maintaining the relative pose relationship between the dual arms.
It is crucial to highlight that the HDRC framework exclusively relies on natural force distribution, avoiding the need for specific force decomposition methods [Reference Caccavale, Chiacchio, Marino and Villani27, Reference Erhart and Hirche28], thereby enhancing the applicability of this approach across various scenarios.
5. Simulations and discussions
This section presents a comparative analysis of the dynamic characteristics of the proposed ISFC, the traditional SFC, and the L-AC in the time domain. According to Eq. (4), the L-AC applied to the controller can be specifically expressed as:
 \begin{equation} \left \{ \begin{array}{l} {m_{\textrm {A}}}\ddot x + {\mu _{\textrm {A}}}\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot { \bar x }= {\lambda _{\textrm {A}}}\dot x \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} {m_{\textrm {A}}}\ddot x + {\mu _{\textrm {A}}}\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot { \bar x }= {\lambda _{\textrm {A}}}\dot x \end{array} \right . \end{equation}
where
 $\lambda _{\textrm {A}}$
denotes the gain parameter of L-AC. According to Eq. (5), the SFC applied to the controller can be expressed as:
$\lambda _{\textrm {A}}$
denotes the gain parameter of L-AC. According to Eq. (5), the SFC applied to the controller can be expressed as:
 \begin{equation} \left \{ \begin{array}{l} {m_S}\ddot x + {\mu _S}{ | {\dot x} |^{{n_{\textrm {s}}} - 1}}\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot { \bar x }= {\lambda _{\textrm {S}}}\dot x \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} {m_S}\ddot x + {\mu _S}{ | {\dot x} |^{{n_{\textrm {s}}} - 1}}\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot { \bar x }= {\lambda _{\textrm {S}}}\dot x \end{array} \right . \end{equation}
where
 $m_{\textrm {S}}$
,
$m_{\textrm {S}}$
,
 $\mu _{\textrm {S}}$
,
$\mu _{\textrm {S}}$
,
 $\lambda _{\textrm {S}}$
denote, respectively, the virtual inertia, virtual damping, and gain parameter of SFC.
$\lambda _{\textrm {S}}$
denote, respectively, the virtual inertia, virtual damping, and gain parameter of SFC.
The ISFC applied to the controller can be formulated as follows:
 \begin{equation} \left \{ \begin{array}{l} m\ddot x + \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot { \bar x } = \lambda \dot x \end{array} \right . \end{equation}
\begin{equation} \left \{ \begin{array}{l} m\ddot x + \left ( {\mu {{ | {\dot x} |}^{n - 1}} + {\eta _0}{e^{ - | {\dot x} |}}} \right )\dot x = {f_{{\textrm {ext}}}}\\[3pt] \dot { \bar x } = \lambda \dot x \end{array} \right . \end{equation}
where
 $\lambda$
denotes the gain parameter of ISFC.
$\lambda$
denotes the gain parameter of ISFC.
To objectively evaluate SFC’s limitation in low-speed operation, we define three metrics for the system response after step removal of traction force at time
 $t_0$
.
$t_0$
.
-
1. Convergence time (
 $T_{\text{conv}}$
): Time from
$t_0$
until velocity satisfies
$|\dot {x}(t)| \leq 0.001 \text{m/s}$
(duration to achieve near-stop).
$T_{\text{conv}}$
): Time from
$t_0$
until velocity satisfies
$|\dot {x}(t)| \leq 0.001 \text{m/s}$
(duration to achieve near-stop). -
2. Residual displacement (
$D_{\text{res}}$
):
$\max |x(t) - x(t_0)|$
for
$t \in [t_0, t_0 + T_{\text{conv}}]$
(unintended movement distance post-force removal). -
3. Overshoot ratio (
$R_{\text{over}}$
):
$ \frac { \max { |\dot {x}_{\text{impact}}(t)|}/{f_{\text{impact}}(t)} }{ \max { |\dot {x}_{\text{traction}}(t)|}/{f_{\text{traction}}(t)} }$
, for
$t\ \geq \ t_0$
(intensity of velocity fluctuation relative to max force).









The parameter settings for ISFC, SFC, and L-AC used in the simulations are detailed in Table I. The key parameters of the proposed ISFC, including the power-law index
 $n$
, initial viscosity
$n$
, initial viscosity
 $\eta _0$
, virtual inertia
$\eta _0$
, virtual inertia
 $m$
, damping coefficient
$m$
, damping coefficient
 $\mu$
, gain
$\mu$
, gain
 $\lambda$
, and sampling time
$\lambda$
, and sampling time
 $\Delta t$
, are determined based on theoretical analysis of shear-thickening fluid dynamics and experimental validation, with reference to the parameter tuning framework for SFC in ref. [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23].
$\Delta t$
, are determined based on theoretical analysis of shear-thickening fluid dynamics and experimental validation, with reference to the parameter tuning framework for SFC in ref. [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23].
-
1. Power-law index
$n$
: The power-law index
$n$
governs the shear-thickening effect of the nonlinear damping term. Following the logic in ref. [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23],
$n$
is selected to balance impact resistance (high damping under large velocities) and low-speed compliance (moderate damping under small velocities). For typical traction forces (
$f_{\text{trac}} \approx 5\,\text{N}$
) and impact forces (
$f_{\text{inter}} \approx 50\,\text{N}$
) in human-dual-arm collaboration,
$n = 3$
is determined using the ratio of force amplitudes and allowable velocities, ensuring the nonlinear damping term
$\mu |\dot {x}|^{n-1}\dot {x}$
effectively suppresses high-speed impacts while maintaining smooth traction. -
2. Initial viscosity
$\eta _0$
: The initial viscosity
$\eta _0$
is introduced to address the low-speed stability defect of SFC (insufficient damping near zero velocity). Through iterative tests with
$\eta _0$
in the range
$1$
–
$10$
,
$\eta _0 = 5$
is chosen because it minimizes residual displacement (
$D_{\text{res}} \approx 4.6\,\text{mm}$
) and convergence time (
$T_{\text{conv}} \approx 0.938\,\text{s}$
) when traction force is removed (Figure 7b), while avoiding excessive damping that hinders low-speed collaboration (Figure 4). -
3. Virtual inertia
$m$
and damping coefficient
$\mu$
: The virtual inertia
$m = 1$
is normalized to simplify dynamics, consistent with the setup in [Reference Chen, Chen, Chen, Lu, Zheng, Wu, Wang, Zhang and Xiong23]. The damping coefficient
$\mu = 391$
is tuned to ensure the nonlinear damping term constrains impact-induced velocities within a safe range (
$\dot {\overline {x}} \lt 1\,\text{m/s}$
under
$f_{\text{ext}} = 50\,\text{N}$
), validated via simulations in Figure 6a. -
4. Gain
$\lambda$
and sampling time
$\Delta t$
: The gain
$\lambda = 0.19$
scales the output velocity to match safe human–robot interaction limits (
$\leq 0.1\,\text{m/s}$
). The sampling time
$\Delta t = 0.001\,\text{s}$
(
$1000\,\text{Hz}$
) is determined to match the robot’s sampling period.



























Table I. Parameters for ISFC, SFC, and L-AC.

The input signals for the external force are given as
 ${f_{{\textrm {ext}}}} = \left \{ {1,10,50} \right \}$
. The relationships between the output velocities of each controller and time are illustrated in Figure 6. As observed, as the external force increases, the output velocities of both ISFC and SFC converge to a safe range (
${f_{{\textrm {ext}}}} = \left \{ {1,10,50} \right \}$
. The relationships between the output velocities of each controller and time are illustrated in Figure 6. As observed, as the external force increases, the output velocities of both ISFC and SFC converge to a safe range (
 $\dot {\bar x} \lt 1$
m/s), attributed to the nonlinear damping term’s suppression of impacts. In contrast, the output velocity of the L-AC converges to nearly 3 m/s, which poses a risk for human operators. Furthermore, Figure 6c reveals a significant curve stratification phenomenon, indicating that the traditional L-AC struggles to manage sudden and substantial force impacts.
$\dot {\bar x} \lt 1$
m/s), attributed to the nonlinear damping term’s suppression of impacts. In contrast, the output velocity of the L-AC converges to nearly 3 m/s, which poses a risk for human operators. Furthermore, Figure 6c reveals a significant curve stratification phenomenon, indicating that the traditional L-AC struggles to manage sudden and substantial force impacts.

Figure 6. The step responses of ISFC (a), SFC (b), and L-AC (c) in the time domain. The blue dashed arrow indicates the direction of increasing external force.

Figure 7.
The output acceleration, velocity, and displacement curves of SFC and ISFC under varying external force
 $f_{{\textrm {ext}}}$
. (a) SFC. (b) ISFC.
$f_{{\textrm {ext}}}$
. (a) SFC. (b) ISFC.
Additionally, the output acceleration, velocity, and displacement curves of the SFC and the proposed ISFC under varying external forces
 $f_{{\textrm {ext}}}$
are presented in Figure 7. The external force input to the systems is expressed as:
$f_{{\textrm {ext}}}$
are presented in Figure 7. The external force input to the systems is expressed as:
 \begin{equation*}{f_{{\textrm {ext}}}} = \left \{ {\begin{array}{*{20}{c}} 5\\ 0\\ { - 5}\\ 0 \end{array}} \right .\begin{array}{*{20}{c}} {,\;\;0 \le t \lt 3\;s}\\ {,\;\;3 \le t \lt 5\;s}\\ {,\;\;5 \le t \lt 8\;s}\\ {\;\;,\;\;8 \le t \le 10\;s} \end{array}\end{equation*}
\begin{equation*}{f_{{\textrm {ext}}}} = \left \{ {\begin{array}{*{20}{c}} 5\\ 0\\ { - 5}\\ 0 \end{array}} \right .\begin{array}{*{20}{c}} {,\;\;0 \le t \lt 3\;s}\\ {,\;\;3 \le t \lt 5\;s}\\ {,\;\;5 \le t \lt 8\;s}\\ {\;\;,\;\;8 \le t \le 10\;s} \end{array}\end{equation*}
Figure 7(a) and (b) compare the responses of SFC and ISFC under the varying force profile. Crucially, during traction force removal (
 $3 \leq t \lt 5$
s and
$3 \leq t \lt 5$
s and
 $8 \leq t \leq 10$
s), SFC exhibits its low-speed stability defect: its output velocity decays slowly due to the near-zero nonlinear damping term at low speeds (
$8 \leq t \leq 10$
s), SFC exhibits its low-speed stability defect: its output velocity decays slowly due to the near-zero nonlinear damping term at low speeds (
 $\dot {x} \lt 0.1$
m/s), resulting in significant residual displacement (
$\dot {x} \lt 0.1$
m/s), resulting in significant residual displacement (
 $D_{\text{res}} \gg 17.3$
mm, simulated for
$D_{\text{res}} \gg 17.3$
mm, simulated for
 $f_{\text{ext}} = 5$
n) and prolonged convergence time (
$f_{\text{ext}} = 5$
n) and prolonged convergence time (
 $T_{\text{conv}} \gg 2$
s). In contrast, ISFC (Figure 7(b)) rapidly dissipates energy via its enhanced damping term
$T_{\text{conv}} \gg 2$
s). In contrast, ISFC (Figure 7(b)) rapidly dissipates energy via its enhanced damping term
 $\eta _{0}e^{-|\dot {x}|}\dot {x}$
, driving the velocity to near zero swiftly (
$\eta _{0}e^{-|\dot {x}|}\dot {x}$
, driving the velocity to near zero swiftly (
 $T_{\text{conv}} \approx 0.938$
s) and minimizing unintended movement (
$T_{\text{conv}} \approx 0.938$
s) and minimizing unintended movement (
 $D_{\text{res}} \approx 4.6$
mm).
$D_{\text{res}} \approx 4.6$
mm).
In summary, the simulation results demonstrate that the ISFC effectively manages impact forces while maintaining system stability at low velocities.
6. Experiments and discussions
6.1. Experimental setup
The experimental setup consists of two ROKAE xMate3 Pro 7-DOF manipulators, two KWR75B force/torque sensors (manufactured by Kunwei Sensing Technology), an industrial PC, and two Rochu grippers. The force sensors are mounted between the robot end flanges and the grippers, enabling direct measurement of the external forces
 $ \mathbf{f}_{\text{ext},1}$
and
$ \mathbf{f}_{\text{ext},1}$
and
 $ \mathbf{f}_{\text{ext},2}$
at each end-effector. This configuration allows the total external force acting on the system to be naturally distributed and measured without requiring explicit force decomposition algorithms. Operating at a sampling rate of 1,000 Hz, the sensors relay force information back to the controller. The controller comprises a control module, a dual-arm robot coordination module, and a communication module, with a total communication cycle of 0.001 s. Furthermore, output signals from the sensors undergo the load/gravity compensation algorithm, although this detail is not the primary focus of this paper.
$ \mathbf{f}_{\text{ext},2}$
at each end-effector. This configuration allows the total external force acting on the system to be naturally distributed and measured without requiring explicit force decomposition algorithms. Operating at a sampling rate of 1,000 Hz, the sensors relay force information back to the controller. The controller comprises a control module, a dual-arm robot coordination module, and a communication module, with a total communication cycle of 0.001 s. Furthermore, output signals from the sensors undergo the load/gravity compensation algorithm, although this detail is not the primary focus of this paper.
6.2. Comparison of performance between ISFC, SFC, and L-AC for a single robot
In this experiment, the control parameters for ISFC, SFC, and L-AC remain consistent with those utilized in the simulations, as detailed in Table I. The maximum comfortable operating force
 ${\textrm {f}}_{\textrm {h}}$
that is comfortable for a human operator to be approximately 3 N, while the impact force exerted by the robot is assumed not to exceed 30 N.
${\textrm {f}}_{\textrm {h}}$
that is comfortable for a human operator to be approximately 3 N, while the impact force exerted by the robot is assumed not to exceed 30 N.
The experiment focuses on the simultaneous impact and traction phase, which comprehensively compares the performances of L-AC, SFC, and ISFC.
Simultaneous impact and traction phase: In this phase, to comprehensively assess the performance of the three control methods in handling both traction and impact forces, a traction force in the
 $Y$
-axis positive direction allows easy robot pushing, with a sudden impact in the negative
$Y$
-axis positive direction allows easy robot pushing, with a sudden impact in the negative
 $Z$
-axis during traction. Note that only forces are considered in these experiments, to prevent the cup from toppling due to potential changes in the robot’s orientation. As shown in Figure 8, in the L-AC scenario, the coffee spills due to an external force impact, whereas in the SFC and ISFC scenarios, the coffee remains intact. Figure 9b illustrates that L-AC incurs a 0.23 m/s velocity jump, causing coffee spilling, while the peak velocities for SFC and ISFC are around 0.047 m/s, with gradual velocity remission post-impact, avoiding sudden jumps. This behavior stems from the dynamic characteristics of shear thickening in the nonlinear damping term. Figure 9 presents the velocity and position variations of the robot’s end-effector. When subjected to a traction force not exceeding 2 N, the robot is pushed stably and smoothly, maintaining a velocity below 0.04 m/s, which demonstrates compliant response characteristics across all three control systems suitable for pHRC.
$Z$
-axis during traction. Note that only forces are considered in these experiments, to prevent the cup from toppling due to potential changes in the robot’s orientation. As shown in Figure 8, in the L-AC scenario, the coffee spills due to an external force impact, whereas in the SFC and ISFC scenarios, the coffee remains intact. Figure 9b illustrates that L-AC incurs a 0.23 m/s velocity jump, causing coffee spilling, while the peak velocities for SFC and ISFC are around 0.047 m/s, with gradual velocity remission post-impact, avoiding sudden jumps. This behavior stems from the dynamic characteristics of shear thickening in the nonlinear damping term. Figure 9 presents the velocity and position variations of the robot’s end-effector. When subjected to a traction force not exceeding 2 N, the robot is pushed stably and smoothly, maintaining a velocity below 0.04 m/s, which demonstrates compliant response characteristics across all three control systems suitable for pHRC.

Figure 8. Snapshots of the simultaneous impact and traction phase.

Figure 9. The external force (Simultaneous impact and traction) acting on the manipulator during the impact phase, as well as the velocity and position of the end-effector. (a)–(c) L-AC. (d)–(f) SFC. (g)–(i) ISFC.
The limitation of SFC is quantitatively evident in Figure 9(e) and (h). Upon removal of the impact force at
 $t \approx 4.563 \, \text{s}$
, SFC exhibits slow convergence (
$t \approx 4.563 \, \text{s}$
, SFC exhibits slow convergence (
 $T_{\text{conv}} = 8.29 \pm 0.55 \, \text{s}$
, mean
$T_{\text{conv}} = 8.29 \pm 0.55 \, \text{s}$
, mean
 $\pm$
std,
$\pm$
std,
 $n=10$
trials,
$n=10$
trials,
 $f_{\text{impact}} \approx 18 \, \text{N}$
), leading to substantial residual displacement (
$f_{\text{impact}} \approx 18 \, \text{N}$
), leading to substantial residual displacement (
 $D_{\text{res}} = 13.21 \pm 1.1 \, \text{mm}$
) as the robot drifts unintentionally (Figure 8, Snapshot 4; Figure 9(e)). This drift poses a collision risk and impedes precise task execution. In stark contrast, ISFC (Figure 9(h,i)) achieves rapid stabilization (
$D_{\text{res}} = 13.21 \pm 1.1 \, \text{mm}$
) as the robot drifts unintentionally (Figure 8, Snapshot 4; Figure 9(e)). This drift poses a collision risk and impedes precise task execution. In stark contrast, ISFC (Figure 9(h,i)) achieves rapid stabilization (
 $T_{\text{conv}} = 0.50 \pm 0.08 \, \text{s}$
) with minimal residual displacement (
$T_{\text{conv}} = 0.50 \pm 0.08 \, \text{s}$
) with minimal residual displacement (
 $D_{\text{res}} = 6.7 \pm 0.3 \, \text{mm}$
). While both controllers exhibit low overshoot ratios (
$D_{\text{res}} = 6.7 \pm 0.3 \, \text{mm}$
). While both controllers exhibit low overshoot ratios (
 $R_{\text{over}} = 0.28 \pm 0.02$
for SFC vs.
$R_{\text{over}} = 0.28 \pm 0.02$
for SFC vs.
 $0.27 \pm 0.01$
for ISFC), the dramatic improvements in
$0.27 \pm 0.01$
for ISFC), the dramatic improvements in
 $T_{\text{conv}}$
(94.1% reduction) and
$T_{\text{conv}}$
(94.1% reduction) and
 $D_{\text{res}}$
(49.3% reduction) conclusively demonstrate ISFC’s resolution of SFC’s low-speed stability defect. These experimental metrics (Table II) align with the simulated behavior in Figure 7 and validate the efficacy of the
$D_{\text{res}}$
(49.3% reduction) conclusively demonstrate ISFC’s resolution of SFC’s low-speed stability defect. These experimental metrics (Table II) align with the simulated behavior in Figure 7 and validate the efficacy of the
 $\eta _{0}e^{-|\dot {x}|}$
damping term.
$\eta _{0}e^{-|\dot {x}|}$
damping term.
Table II. Experimental comparison of low-speed stability metrics (SFC vs. ISFC,
 $f_{\text{ext}} \approx 18\text{N}$
,
$f_{\text{ext}} \approx 18\text{N}$
,
 $n=10$
trials).
$n=10$
trials).


Figure 10. Snapshots of the traction phase of HDRC.
In conclusion, the proposed ISFC algorithm can be effectively applied in pHRC, resisting random impacts and maintaining low-velocity stability. These advantages are attributed to the nonlinear damping term of the ISFC, which accounts for viscosity changes during shear thinning in shear-thickening fluids (STFs). This allows the system to maintain relatively high damping at low velocities, preventing unintended movements of the robot, as quantitatively demonstrated by the 94% reduction in convergence time and 49% reduction in residual displacement compared to SFC (Table II).
6.3. Comparison of performance between ISFC, SFC, and L-AC for a dual-arm robot
Traction and Impact Phase of HDRC: As illustrated in Figure 10, snapshots are presented from the experimental phase of the cooperative water-carrying traction phase between robots and a human operator. Impacts are randomly applied to the end-effectors of Robot 1 and Robot 2.
The experimental results are depicted in Figure 11. The external forces are denoted as
 $\textbf {f}_{{\textrm {ext1}}}$
and
$\textbf {f}_{{\textrm {ext1}}}$
and
 $\textbf {f}_{{\textrm {ext2}}}$
, as illustrated in Figure 11(a) and (b). The trajectories of the two robots’ end-effectors are depicted in Figure 11(c), consistent with the snapshots shown in Figure 10. The controller proposed in Section IV enables dual-arm robot to collaborate with human to complete tasks. Furthermore, the output velocities of the two robots, as illustrated in Figure 11(d) and (e), demonstrate a positive correlation with the external forces, indicating that the robots can respond smoothly to the intentions of the human operator.
$\textbf {f}_{{\textrm {ext2}}}$
, as illustrated in Figure 11(a) and (b). The trajectories of the two robots’ end-effectors are depicted in Figure 11(c), consistent with the snapshots shown in Figure 10. The controller proposed in Section IV enables dual-arm robot to collaborate with human to complete tasks. Furthermore, the output velocities of the two robots, as illustrated in Figure 11(d) and (e), demonstrate a positive correlation with the external forces, indicating that the robots can respond smoothly to the intentions of the human operator.

Figure 11.
The results of the collaborative traction and impact phase between the dual-arm robot and the human operator. (a) and (b) External forces
 $f_{{\textrm {ext1}}}$
and
$f_{{\textrm {ext1}}}$
and
 $f_{{\textrm {ext2}}}$
. (c) Three-dimensional positions of robots 1 and 2. (d) and (e) Output velocities of robots 1 and 2. (f) Position synchronous error.
$f_{{\textrm {ext2}}}$
. (c) Three-dimensional positions of robots 1 and 2. (d) and (e) Output velocities of robots 1 and 2. (f) Position synchronous error.
The fluctuations in velocity observed in Figure 11(d) and (e) result from these impacts. Notably, despite the presence of impacts, the peak velocity generated remains within the safe range for human–robot collaboration, not exceeding 0.1 m/s. To further illustrate the advantages of the algorithm, the concept of position synchronous error is introduced. In this paper, position synchronous error is defined as the difference between the positions of Robot 1 and Robot 2 at each communication cycle, with the initial position deviation subtracted. The position synchronous errors of the two robots in the
 $X$
,
$X$
,
 $Y$
, and
$Y$
, and
 $Z$
directions are illustrated in Figure 11f. The position synchronous error is less than 8 mm, indicating excellent synchronization performance of the controller. The error reaches its maximum when the absolute value of the instantaneous velocity is highest, with a peak of 7.05 mm in the
$Z$
directions are illustrated in Figure 11f. The position synchronous error is less than 8 mm, indicating excellent synchronization performance of the controller. The error reaches its maximum when the absolute value of the instantaneous velocity is highest, with a peak of 7.05 mm in the
 $Z$
-direction. However, once the impact dissipates, the position synchronous error decreases to a lower numerical range. Moreover, the position synchronous error is positively correlated with the output velocity, which is due to the limitations of the system’s communication cycle.
$Z$
-direction. However, once the impact dissipates, the position synchronous error decreases to a lower numerical range. Moreover, the position synchronous error is positively correlated with the output velocity, which is due to the limitations of the system’s communication cycle.
The experimental results demonstrate that the proposed ISFC algorithm effectively resists random impacts and maintains stability under low-velocity conditions. When integrated with the HDRC framework, the ISFC can be deployed on dual-arm robots to achieve stable operations that are resilient to impacts, thereby facilitating reliable collaboration between human operators and dual-arm robots in the presence of disturbances.
7. Conclusion
In this paper, we propose an Improved SFC that accounts for changes in the apparent viscosity of shear-thickening fluids during shear thinning, representing this effect as an additional damping term in the algorithm. This controller enables the robot to move and stop in accordance with the human operator’s intentions while withstanding random impacts. Additionally, we introduce a human-arm robot collaboration framework based on the ISFC.
To contextualize the contributions of ISFC within the broader landscape of advanced control strategies, we provide a comparative analysis against three prominent approaches:
-
1. Compared to adaptive impedance/admittance control [Reference He, Xue, Yu, Li and Yang17–Reference Wu, Shen, Li, Li and Tian19]: ISFC achieves comparable adaptability to human intentions without requiring real-time parameter estimation. Its nonlinear damping term inherently suppresses impact disturbances (e.g., reducing velocity overshoot by 94% vs. L-AC in Figure 9), whereas adaptive methods often rely on explicit collision detection modules [Reference Haddadin, De Luca and Albu-Schäffer20] that introduce latency. During impacts, ISFC constrains end-effector velocity to <0.1 m/s (Figure 9g–i), aligning with ISO/TS 15,066 safety limits.
-
2. Compared to optimization-based controllers [Reference Ying, Pourhejazy, Cheng and Cai1, Reference Ren, Zhou, Xu, Yang, Zhai, Leibold, Ni, Zhang, Buss and Zheng4]: ISFC attains similar impact resistance (peak velocity
$\leq 0.047$
m/s under 30N impacts, Figure 9) and dual-arm coordination precision (synchronization error <8 mm, Figure 11f) while avoiding computational optimization overhead. This enhances real-time feasibility in dynamic human–robot collaboration scenarios. -
3. Compared to hybrid force-position control [Reference Caccavale, Chiacchio, Marino and Villani27, Reference Erhart and Hirche28]: Unlike methods requiring precise force decomposition models, ISFC leverages natural force distribution through physics-inspired dynamics (Section IV). This simplifies implementation while ensuring stability during disturbances, evidenced by rapid post-impact convergence (0.5 s vs. SFC’s 8.29 s, Table II) and minimal residual displacement (6.7 mm vs. SFC’s 13.21 mm).

The core distinction of ISFC lies in the following: By encoding shear-thickening/thinning properties directly into control laws, it intrinsically reconciles impact resistance and low-speed stability – a capability typically requiring multi-layer architectures in model-based approaches. This biomimetic design enables passive-aggressive compliance (yielding to traction while resisting impacts) with minimal computational cost.
Despite these advancements, certain limitations remain that warrant further investigation, which will guide future research directions. First, the controller parameters determined in this study were based on simulations and can be further optimized in subsequent work. Furthermore, the HDRC framework currently addresses only the positional coordination of the two manipulators; future research could explore human–robot collaboration for tasks involving orientation changes.
Supplementary material
The supplementary material for this article can be found at https://doi.org/10.1017/S0263574726103312.
Author contributions
Siwen Zhang, Jinjun Duan, and Yiming Bin conceived and designed the study. Siwen Zhang and Chendong Wu were responsible for data collection and statistical analysis. Siwen Zhang wrote the article. Siwen Zhang, Chendong Wu, and Tingyan Du assisted with the structure and language of the manuscript. All authors read and approved the final manuscript.
Financial support
This work was supported by the National Youth Science Foundation of China under Grant No. 52205017, the Aviation Foundation under Grant No. 2022Z050052001, and the Jiangsu Funding Program for Excellent Postdoctoral Talent under Grant No. 2023ZB052.
Competing interests
The authors declare no conflicts of interest exist.
Ethical approval
Not applicable.