



1. Introduction
A modal companion of a superintuitionistic logic
 $\mathtt {L}$
is defined as any normal modal logic
$\mathtt {L}$
is defined as any normal modal logic
 $\mathtt {M}$
extending
$\mathtt {M}$
extending
 $\mathtt {S4}$
such that the Gödel translation fully and faithfully embeds
$\mathtt {S4}$
such that the Gödel translation fully and faithfully embeds
 $\mathtt {L}$
into
$\mathtt {L}$
into
 $\mathtt {M}$
. The notion of a modal companion has sparked a remarkably prolific line of research, documented, e.g., in the surveys [Reference Chagrov and Zakharyaschev13, Reference Wolter44]. The jewel of this research line is the celebrated Blok–Esakia theorem, first proved independently by Blok [Reference Blok10] and Esakia [Reference Esakia19]. The theorem states that the lattice of superintuitionistic logics is isomorphic to the lattice of normal extensions of Grzegorczyk’s modal logic
$\mathtt {M}$
. The notion of a modal companion has sparked a remarkably prolific line of research, documented, e.g., in the surveys [Reference Chagrov and Zakharyaschev13, Reference Wolter44]. The jewel of this research line is the celebrated Blok–Esakia theorem, first proved independently by Blok [Reference Blok10] and Esakia [Reference Esakia19]. The theorem states that the lattice of superintuitionistic logics is isomorphic to the lattice of normal extensions of Grzegorczyk’s modal logic
 $\mathtt {Grz}$
, via the mapping which sends each superintuitionistic logic
$\mathtt {Grz}$
, via the mapping which sends each superintuitionistic logic
 $\mathtt {L}$
to the normal extension of
$\mathtt {L}$
to the normal extension of
 $\mathtt {Grz}$
with the set of all Gödel translations of formulae in
$\mathtt {Grz}$
with the set of all Gödel translations of formulae in
 $\mathtt {L}$
.
$\mathtt {L}$
.
Zakharyashchev [Reference Zakharyashchev47] developed a unified approach to the theory of modal companions, via his technique of canonical formulae. These formulae generalize the subframe formulae of Fine [Reference Fine22]. Like a subframe formula, a canonical formula syntactically encodes the structure of a finite refutation pattern, i.e., a finite transitive frame together with a (possibly empty) set of parameters. By applying a version of the selective filtration construction, every formula can be matched with a finite set of finite refutation patterns, in such a way that the conjunction of all the canonical formulae associated with the refutation patterns is equivalent to the original formula. By studying how the Gödel translation affects superintuitionistic canonical formulae, Zakharyashchev gave alternative proofs of classic theorems in the theory of modal companions, and extended this theory with several novel results. Among these, he confirmed the Dummett–Lemmon conjecture, formulated in [Reference Dummett and Lemmon16], which states that a superintuitionistic logic is Kripke complete iff its weakest modal companion is. Jeřábek [Reference Jeřábek27] generalized canonical formulae to canonical rules, and applied this notion to extend Zakharyaschev’s approach to the theory of modal companions to rule systems (also known as multi-conclusion consequence relations.)
In [Reference Bezhanishvili and Bezhanishvili3, Reference Bezhanishvili, Bezhanishvili and Iemhoff5, Reference Bezhanishvili, Bezhanishvili and Ilin6], stable canonical formulae and rules were introduced as an alternative to Zakharyaschev and Jeřábek-style canonical rules and formulae. The basic idea is the same: a stable canonical formula or rule syntactically encodes the semantic structure of a finite refutation pattern. The main difference lies in how such structure is encoded, which affects how refutation patterns are constructed in the process of rewriting a formula (or rule) into a conjunction of stable canonical formulae (or rules). Namely, in the case of stable canonical formulae and rules, finite refutation patterns are constructed by taking filtrations rather than selective filtrations of countermodels. A survey of stable canonical formulae and rules can be found in [Reference Bezhanishvili, Bezhanishvili, Citkin and Vandoulakis4].
In this article, we apply stable canonical rules to develop a novel, uniform approach to the study of modal companions and similar notions in richer signatures. Our approach echoes the Zakharyaschev–Jeřábek approach in using rules encoding finite refutation patterns, but also bears circumscribed similarities with Blok’s original algebraic approach in some proof strategies (see Remark 5.3). Our techniques deliver central results in the theory of modal companions through transparent geometrical arguments. In particular, we obtain an alternative proof of the Blok–Esakia theorem for both logics and rule systems, and generalize the Dummett–Lemmon conjecture to rule systems.
Due to the flexibility of filtration, our techniques generalize smoothly to rule systems in richer signatures. To illustrate this, we apply our method to the study of tense companions of bi-superintuitionistic deductive systems and to the study of (mono)modal companions of modal intuitionistic rule systems above
 $\mathtt {KM}$
. In each of these cases, we prove analogues of the Blok–Esakia theorem. When restricted to logics, these results were proved, respectively, by Wolter [Reference Wolter43, Theorem 23] and [Reference Kuznetsov and Muravitsky31, Proposition 3], though they appear to be new for rule systems. In the case of tense companions, in addition, we also prove an analogue of the Dummett–Lemmon conjecture for rule systems, which also appears to be novel.
$\mathtt {KM}$
. In each of these cases, we prove analogues of the Blok–Esakia theorem. When restricted to logics, these results were proved, respectively, by Wolter [Reference Wolter43, Theorem 23] and [Reference Kuznetsov and Muravitsky31, Proposition 3], though they appear to be new for rule systems. In the case of tense companions, in addition, we also prove an analogue of the Dummett–Lemmon conjecture for rule systems, which also appears to be novel.
Notably, in each of these three cases, our main results are proved by essentially the same arguments. By contrast, generalizing the Zakharyaschev–Jeřábek technique beyond the case of modal companions of superintuitionistic logics is far from straightforward. In particular, as we argue towards the end of Section 4, it is far from clear whether the Zakharyaschev–Jeřábek technique generalizes to the case of tense companions, since selective filtration does not work well for bi-superintuitionistic and tense logics.
The techniques described in this article can also be used to obtain axiomatic characterizations of the modal companion maps (and their counterparts in the richer signatures discussed here) in terms of stable canonical rules, as well as some results concerning the notion of stability [Reference Bezhanishvili, Bezhanishvili and Ilin7]. These results can be found in the recent master’s thesis [Reference Cleani15], on which the present article is based.
The article is organized as follows. We begin by reviewing some general preliminaries in Section 2, followed by the basic constructions in the theory of modal companions in Section 3. We then introduce stable canonical rules in Section 4, generalizing known constructions to the bi-superintuitionistic and tense case. In Section 5, we present our proof of a general Blok–Esakia theorem, which uniformly applies to each of the three notions of companions we are interested in. Finally, in Section 6, we present our proof of a general Dummett–Lemmon conjecture, applying to both modal and tense companions. We conclude in Section 7.
2. Preliminaries
We review some basic facts about rule systems and their interpretation over algebras, topological spaces, and Kripke frames. The reader may consult the following references for more detailed information: [Reference Iemhoff25] for rule systems in general; [Reference Chagrov and Zakharyaschev14, Reference Jeřábek27] for modal and superintuitionistic rule systems; [Reference Burris and Sankappanavar11] for universal algebra; and [Reference Esakia21, Reference Johnstone28] for duality theory.
2.1. Rule systems
Throughout the article, we fix a countably infinite set of propositional variables
 $\mathit {Prop}$
. For a signature
$\mathit {Prop}$
. For a signature
 $\nu $
(a finite set of propositional connectives), the set
$\nu $
(a finite set of propositional connectives), the set
 $\mathit {Frm}_\nu $
of
$\mathit {Frm}_\nu $
of
 $\nu $
-formulae is built from
$\nu $
-formulae is built from
 $\mathit {Prop}$
using the connectives in
$\mathit {Prop}$
using the connectives in
 $\nu $
in the usual way. A substitution is a map
$\nu $
in the usual way. A substitution is a map
 $s:\mathit {Frm}_\nu (\mathit {Prop})\to \mathit {Frm}_\nu (\mathit {Prop})$
which commutes with the operators in
$s:\mathit {Frm}_\nu (\mathit {Prop})\to \mathit {Frm}_\nu (\mathit {Prop})$
which commutes with the operators in
 $\nu $
.
$\nu $
.
A rule in signature
 $\nu $
is a pair
$\nu $
is a pair
 $(\Gamma , \Delta )$
such that
$(\Gamma , \Delta )$
such that
 $\Gamma , \Delta $
are finite subsets of
$\Gamma , \Delta $
are finite subsets of
 $\mathit {Frm}_\nu $
. In case
$\mathit {Frm}_\nu $
. In case
 $\Delta =\{\varphi \},$
we write
$\Delta =\{\varphi \},$
we write
 $\Gamma /\Delta $
simply as
$\Gamma /\Delta $
simply as
 $\Gamma /\varphi $
, and analogously if
$\Gamma /\varphi $
, and analogously if
 $\Gamma =\{\psi \}$
. Moreover, we write
$\Gamma =\{\psi \}$
. Moreover, we write
 $/\varphi $
for the rule
$/\varphi $
for the rule
 $\varnothing /\varphi $
. A rule is said to be single-conclusion when of the form
$\varnothing /\varphi $
. A rule is said to be single-conclusion when of the form
 $\Gamma /\varphi $
, and assumption free when of the form
$\Gamma /\varphi $
, and assumption free when of the form
 $/\Delta $
. We use
$/\Delta $
. We use
 $;$
to denote union between finite sets of formulae, so that
$;$
to denote union between finite sets of formulae, so that
 $\Gamma; \Delta =\Gamma \cup \Delta $
and
$\Gamma; \Delta =\Gamma \cup \Delta $
and
 $\Gamma; \varphi =\Gamma \cup \{\varphi \}$
. We let
$\Gamma; \varphi =\Gamma \cup \{\varphi \}$
. We let
 $\mathit {Rul}_\nu $
be the set of all rules in
$\mathit {Rul}_\nu $
be the set of all rules in
 $\nu $
.
$\nu $
.
Definition 2.1. A rule system
Footnote
1
in signature
 $\nu $
is a set
$\nu $
is a set
 $\mathtt {S}\subseteq \mathit {Rul}_\nu $
satisfying the following conditions:
$\mathtt {S}\subseteq \mathit {Rul}_\nu $
satisfying the following conditions:
-
(1) if
 $\Gamma /\Delta \in \mathtt {S}$
, then
$ s[\Gamma ]/ s[\Delta ]\in \mathtt {S}$
for all substitutions s (structurality);
$\Gamma /\Delta \in \mathtt {S}$
, then
$ s[\Gamma ]/ s[\Delta ]\in \mathtt {S}$
for all substitutions s (structurality); -
(2)
$\varphi /\varphi \in \mathtt {S}$
for every formula
$\varphi $
(reflexivity); -
(3) if
$\Gamma /\Delta \in \mathtt {S}$
, then
$\Gamma ;\Gamma '/\Delta ;\Delta '\in \mathtt {S}$
for any finite sets of formulae
$\Gamma ',\Delta '$
(monotonicity); -
(4) if
$\Gamma /\Delta ;\varphi \in \mathtt {S}$
and
$\Gamma ;\varphi /\Delta \in \mathtt {S}$
, then
$\Gamma /\Delta \in \mathtt {S}$
(cut).










If
 $\mathcal {S}$
is a set of rule systems and
$\mathcal {S}$
is a set of rule systems and
 $\Sigma , \Xi $
are sets of rules, we write
$\Sigma , \Xi $
are sets of rules, we write
 $\Xi \oplus _{\mathcal {S}}\Sigma $
for the least rule system in
$\Xi \oplus _{\mathcal {S}}\Sigma $
for the least rule system in
 $\mathcal {S}$
, if it exists, extending both
$\mathcal {S}$
, if it exists, extending both
 $\Xi $
and
$\Xi $
and
 $\Sigma $
. A set of rules
$\Sigma $
. A set of rules
 $\Sigma $
is said to axiomatize a rule system
$\Sigma $
is said to axiomatize a rule system
 $\mathtt {S}\in \mathcal {S}$
over some rule system
$\mathtt {S}\in \mathcal {S}$
over some rule system
 $\mathtt {S}'\in \mathcal {S}$
if
$\mathtt {S}'\in \mathcal {S}$
if
 $\mathtt {S}'\oplus _{\mathcal {S}}\Sigma =\mathtt {S}$
. Normally, we will take
$\mathtt {S}'\oplus _{\mathcal {S}}\Sigma =\mathtt {S}$
. Normally, we will take
 $\mathcal {S}$
to be the set of all extensions of some particular rule system. When
$\mathcal {S}$
to be the set of all extensions of some particular rule system. When
 $\mathcal {S}$
is clear from context, we write simply
$\mathcal {S}$
is clear from context, we write simply
 $\oplus $
instead of
$\oplus $
instead of
 $\oplus _{\mathcal {S}}$
.
$\oplus _{\mathcal {S}}$
.
In this article, we will work with rule systems in five different signatures.
-
• the modal signature
$m:=\{\land , \neg , \bot , \square \}$
; -
• the tense signature
$t:=\{\land , \neg , \bot , \square , \blacklozenge \}$
; -
• the superintuitionistic (si) signature
$si:=\{\land , \lor , \to , \bot , \top \}$
; -
• the bi-superintuitionistic (bsi) signature
$bsi:=\{\land , \lor , \to , \leftarrow , \bot , \top \}$
; -
• the modal superintuitionistic (msi) signature
$msi:=\{\land , \lor , \to , \boxtimes , \top , \bot \}$
.





When working in the modal and tense signatures, we will treat the other Boolean and modal connectives as defined in the usual way. We will denote the duals of
 $\square $
and
$\square $
and
 $\blacklozenge $
as
$\blacklozenge $
as
 $\lozenge $
and
$\lozenge $
and
 $\blacksquare ,$
respectively. In the bsi signature, we also use the abbreviations
$\blacksquare ,$
respectively. In the bsi signature, we also use the abbreviations
For each unary propositional connective
 $\heartsuit $
, we define the rules
$\heartsuit $
, we define the rules
A normal modal rule system is a rule system in the signature m containing the rule
 $/\varphi $
whenever
$/\varphi $
whenever
 $\varphi $
is a theorem of the Classical Propositional Calculus, as well as the rules (K
$\varphi $
is a theorem of the Classical Propositional Calculus, as well as the rules (K
 $_\square $
), (Nec
$_\square $
), (Nec
 $_\square $
) and
$_\square $
) and
 $$ \begin{align} & \varphi\to \psi, \varphi/\psi. \end{align} $$
$$ \begin{align} & \varphi\to \psi, \varphi/\psi. \end{align} $$
A normal tense rule system is a rule system in the signature t, whose
 $\square $
-free and
$\square $
-free and
 $\blacklozenge $
-free fragments are each a normal modal rule system (with respect to
$\blacklozenge $
-free fragments are each a normal modal rule system (with respect to
 $\square $
and
$\square $
and
 $\blacklozenge ,$
respectively) and which, in addition, contains the rule
$\blacklozenge ,$
respectively) and which, in addition, contains the rule
 $$ \begin{align} & /\varphi\to \square \blacklozenge \varphi. \end{align} $$
$$ \begin{align} & /\varphi\to \square \blacklozenge \varphi. \end{align} $$
We will henceforth omit the prefix “normal.”
An si rule system is a rule system in the signature
 $si$
containing the rule
$si$
containing the rule
 $/\varphi $
whenever
$/\varphi $
whenever
 $\varphi $
is a theorem of the intuitionistic propositional calculus
$\varphi $
is a theorem of the intuitionistic propositional calculus
 $\mathtt {IPC}$
, as well as the rule (MP). A bsi rule system is a rule system in the signature
$\mathtt {IPC}$
, as well as the rule (MP). A bsi rule system is a rule system in the signature
 $bsi$
containing the rule
$bsi$
containing the rule
 $/\varphi $
whenever
$/\varphi $
whenever
 $\varphi $
is a theorem of the bi-intutionistic propositional calculus
$\varphi $
is a theorem of the bi-intutionistic propositional calculus
 $\mathtt {biIPC}$
, as well as the rules (MP) and (Nec
$\mathtt {biIPC}$
, as well as the rules (MP) and (Nec
![]() ). We refer the reader to [Reference Chagrov and Zakharyaschev14, Chapter 12] and [Reference Rauszer36] for explicit axiomatizations of
). We refer the reader to [Reference Chagrov and Zakharyaschev14, Chapter 12] and [Reference Rauszer36] for explicit axiomatizations of
 $\mathtt {IPC}$
and
$\mathtt {IPC}$
and
 $\mathtt {biIPC,}$
respectively.
$\mathtt {biIPC,}$
respectively.
Finally, an msi rule system is a rule system in the signature
 $msi$
, whose
$msi$
, whose
 $si$
fragment is an si rule system and which, in addition, contains the rules (K
$si$
fragment is an si rule system and which, in addition, contains the rules (K
 $_\boxtimes $
) and (Nec
$_\boxtimes $
) and (Nec
 $_\boxtimes $
), as well as the following:
$_\boxtimes $
), as well as the following:
 $$ \begin{align} &/p\to \boxtimes p, \end{align} $$
$$ \begin{align} &/p\to \boxtimes p, \end{align} $$
 $$ \begin{align} &{/}{\boxtimes} p \to (q \lor (q\to p)). \end{align} $$
$$ \begin{align} &{/}{\boxtimes} p \to (q \lor (q\to p)). \end{align} $$
When
 $\mathtt {M}$
is a modal (resp., tense and msi) rule system, we write
$\mathtt {M}$
is a modal (resp., tense and msi) rule system, we write
 $\mathbf {NExt}(\mathtt {M})$
for the class of all modal (resp., tense and msi) rule systems extending
$\mathbf {NExt}(\mathtt {M})$
for the class of all modal (resp., tense and msi) rule systems extending
 $\mathtt {M}$
. Similarly, when
$\mathtt {M}$
. Similarly, when
 $\mathtt {L}$
is an si or bsi rule system, we write
$\mathtt {L}$
is an si or bsi rule system, we write
 $\mathbf {Ext}(\mathtt {L})$
for the class of all si or bsi rule systems extending
$\mathbf {Ext}(\mathtt {L})$
for the class of all si or bsi rule systems extending
 $\mathtt {L}$
. We note that all these classes of rule systems form complete lattices, where the meet is intersection and the join is given by the
$\mathtt {L}$
. We note that all these classes of rule systems form complete lattices, where the meet is intersection and the join is given by the
 $\oplus $
operation over the relevant class of rule systems.
$\oplus $
operation over the relevant class of rule systems.
A (modal, tense, si, bsi, or msi) logic is a (modal, tense, si, bsi, or msi) rule system which can be axiomatized, over the least rule system of the same kind, by a set of assumption-free, single conclusion rules. Logics in this sense correspond one-to-one with logics conceived of as sets of formulae closed under appropriate conditions, a conception that much of the literature in the field of modal and superintuitionitstic logic shares. For example, the (normal) modal logics in the standard sense [e.g., Reference Chagrov and Zakharyaschev14, p. 113] correspond one-to-one with the normal modal rule systems axiomatizable by assumption-free, single conclusion rules. When
 $\mathtt {M}$
is a modal logic in this sense, there is always a corresponding modal rule system
$\mathtt {M}$
is a modal logic in this sense, there is always a corresponding modal rule system
 $/\mathtt {M}$
axiomatized by
$/\mathtt {M}$
axiomatized by
 $\{/\varphi :\varphi \in \mathtt {M}\}$
. Conversely, for any modal rule system
$\{/\varphi :\varphi \in \mathtt {M}\}$
. Conversely, for any modal rule system
 $\mathtt {N,}$
the set
$\mathtt {N,}$
the set
 $\{\varphi :/\varphi \in \mathtt {N}\}$
is always a modal logic in the standard sense.
$\{\varphi :/\varphi \in \mathtt {N}\}$
is always a modal logic in the standard sense.
Convention 2.2. In view of this correspondence, we will use familiar names for standard logics in the literature to refer to the corresponding rule system: that is, when
 $\mathtt {S}$
names a standard (modal, tense, si, bsi, or msi) logic, we shall identify
$\mathtt {S}$
names a standard (modal, tense, si, bsi, or msi) logic, we shall identify
 $\mathtt {S}$
with the rule system
$\mathtt {S}$
with the rule system
 $/\mathtt {S}$
defined as above. Thus, for example, we write
$/\mathtt {S}$
defined as above. Thus, for example, we write
 $\mathtt {K}$
for the least modal rule system,
$\mathtt {K}$
for the least modal rule system,
 $\mathtt {IPC}$
for the least si rule system, and so on.
$\mathtt {IPC}$
for the least si rule system, and so on.
The set
 $\mathcal {L}$
of rule systems of a given kind which admit an assumption-free, single conclusion axiomatization forms a complete lattice. Moving forward, when
$\mathcal {L}$
of rule systems of a given kind which admit an assumption-free, single conclusion axiomatization forms a complete lattice. Moving forward, when
 $\mathbf {NExt}(\mathtt {M})$
(resp.,
$\mathbf {NExt}(\mathtt {M})$
(resp.,
 $\mathbf {Ext}(\mathtt {L}))$
is a lattice of rule systems, we denote the corresponding lattice of logics as
$\mathbf {Ext}(\mathtt {L}))$
is a lattice of rule systems, we denote the corresponding lattice of logics as
 $\mathbf {NExtL}(\mathtt {M})$
(resp.,
$\mathbf {NExtL}(\mathtt {M})$
(resp.,
 $\mathbf {ExtL}(\mathtt {L}))$
. The join
$\mathbf {ExtL}(\mathtt {L}))$
. The join
 $\oplus _{\mathbf {NExtL}(\mathtt {M})}$
coincides with
$\oplus _{\mathbf {NExtL}(\mathtt {M})}$
coincides with
 $\oplus _{\mathbf {NExt}(\mathtt {M})}$
. However, the meets
$\oplus _{\mathbf {NExt}(\mathtt {M})}$
. However, the meets
 $\otimes _{\mathbf {NExtL}(\mathtt {M})}$
and
$\otimes _{\mathbf {NExtL}(\mathtt {M})}$
and
 $\otimes _{\mathbf {NExt}(\mathtt {M})}$
generally come apart: the meet in
$\otimes _{\mathbf {NExt}(\mathtt {M})}$
generally come apart: the meet in
 $\mathbf {NExt}(\mathtt {M})$
of two logics may itself fail to be a logic. Likewise in the si and bsi cases.
$\mathbf {NExt}(\mathtt {M})$
of two logics may itself fail to be a logic. Likewise in the si and bsi cases.
The meet
 $\otimes _{\mathbf {NExtL}(\mathtt {M})}$
can be characterized in terms of
$\otimes _{\mathbf {NExtL}(\mathtt {M})}$
can be characterized in terms of
 $\otimes _{\mathbf {NExt}(\mathtt {M})}$
as follows. If
$\otimes _{\mathbf {NExt}(\mathtt {M})}$
as follows. If
 $\mathtt {N}\in \mathbf {NExt}(\mathtt {M})$
is a rule system, let
$\mathtt {N}\in \mathbf {NExt}(\mathtt {M})$
is a rule system, let
 $\mathsf {Taut}(\mathtt {N})$
be the logic axiomatized over
$\mathsf {Taut}(\mathtt {N})$
be the logic axiomatized over
 $\mathtt {M}$
by all assumption-free, single conclusion belonging to
$\mathtt {M}$
by all assumption-free, single conclusion belonging to
 $\mathtt {N}$
. Analogously, we define
$\mathtt {N}$
. Analogously, we define
 $\mathsf {Taut}(\mathtt {L})$
when
$\mathsf {Taut}(\mathtt {L})$
when
 $\mathtt {L}$
is an si or bsi rule system.
$\mathtt {L}$
is an si or bsi rule system.
Proposition 2.3. Let
 $\mathcal {S}:=\mathbf {NExt}(\mathtt {M}) ($
resp.,
$\mathcal {S}:=\mathbf {NExt}(\mathtt {M}) ($
resp.,
 $\mathbf {Ext}(\mathtt {L}))$
and let
$\mathbf {Ext}(\mathtt {L}))$
and let
 $\mathcal {L}:=\mathbf {NExtL}(\mathtt {M}) ($
resp.,
$\mathcal {L}:=\mathbf {NExtL}(\mathtt {M}) ($
resp.,
 $\mathbf {ExtL}(\mathtt {L}))$
. Then the identity
$\mathbf {ExtL}(\mathtt {L}))$
. Then the identity
 $$\begin{align*}\otimes_{\mathcal{L}}\{\mathtt{S}_i:i\in I\}=\mathsf{Taut}\left(\otimes_{\mathcal{S}}\{\mathtt{S}_i:i\in I\}\right) \end{align*}$$
$$\begin{align*}\otimes_{\mathcal{L}}\{\mathtt{S}_i:i\in I\}=\mathsf{Taut}\left(\otimes_{\mathcal{S}}\{\mathtt{S}_i:i\in I\}\right) \end{align*}$$
holds for all logics
 $\{\mathtt {S}_i:i\in I\}\subseteq \mathcal {L}$
.
$\{\mathtt {S}_i:i\in I\}\subseteq \mathcal {L}$
.
Proof. We prove this result for binary meets; the proof of the general case is completely analogous. Note first that
 $\mathsf {Taut}$
is monotonic and for each rule system
$\mathsf {Taut}$
is monotonic and for each rule system
 $\mathtt {S}\in \mathcal {S}$
we have
$\mathtt {S}\in \mathcal {S}$
we have
 $\mathsf {Taut}(\mathtt {S})\subseteq \mathtt {S}$
. Now, clearly
$\mathsf {Taut}(\mathtt {S})\subseteq \mathtt {S}$
. Now, clearly
 $\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}\subseteq \mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'}.$
So,
$\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}\subseteq \mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'}.$
So,
 $\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'})\subseteq \mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})$
by monotonicity. But
$\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'})\subseteq \mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})$
by monotonicity. But
 $\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'})=\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}$
, so
$\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'})=\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}$
, so
 $\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}\subseteq \mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})$
. Conversely, by
$\mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}\subseteq \mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})$
. Conversely, by
 $\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})\subseteq \mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'}$
, it follows that
$\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})\subseteq \mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'}$
, it follows that
 $\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})$
is a logic below both
$\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})$
is a logic below both
 $\mathtt {S}$
and
$\mathtt {S}$
and
 $\mathtt {S'}$
, and so
$\mathtt {S'}$
, and so
 $\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})\subseteq \mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}$
.
$\mathsf {Taut}(\mathtt {S}\otimes _{\mathcal {S}} \mathtt {S'})\subseteq \mathtt {S}\otimes _{\mathcal {L}}\mathtt {S'}$
.
Throughout the article, we will refer to a number of standard rule systems. We collect all of them in Table 1.
Standard rule systems.

2.2. Algebraic semantics
We interpret rule systems over algebras in the same signature. If
 $\mathfrak {A}$
is a
$\mathfrak {A}$
is a
 $\nu $
-algebra, we denote its carrier as A. Let
$\nu $
-algebra, we denote its carrier as A. Let
 $\mathfrak {A}$
be some
$\mathfrak {A}$
be some
 $\nu $
-algebra. A valuation on
$\nu $
-algebra. A valuation on
 $\mathfrak {A}$
is a map
$\mathfrak {A}$
is a map
 $V:\mathit {Frm}_\nu \to A$
, satisfying the condition
$V:\mathit {Frm}_\nu \to A$
, satisfying the condition
 $$\begin{align*}V(f(\varphi_1, \ldots, \varphi_n)):=f^{\mathfrak{A}}(V(\varphi_1), \ldots, V(\varphi_n))\end{align*}$$
$$\begin{align*}V(f(\varphi_1, \ldots, \varphi_n)):=f^{\mathfrak{A}}(V(\varphi_1), \ldots, V(\varphi_n))\end{align*}$$
for each
 $f\in \nu $
. A pair
$f\in \nu $
. A pair
 $(\mathfrak {A}, V),$
where
$(\mathfrak {A}, V),$
where
 $\mathfrak {A}$
is a
$\mathfrak {A}$
is a
 $\nu $
-algebra and V a valuation on
$\nu $
-algebra and V a valuation on
 $\mathfrak {A}$
, is called a model. A model
$\mathfrak {A}$
, is called a model. A model
 $(\mathfrak {A}, V)$
satisfies a rule
$(\mathfrak {A}, V)$
satisfies a rule
 $\Gamma /\Delta $
when the following holds: if
$\Gamma /\Delta $
when the following holds: if
 $V(\gamma )=1$
for all
$V(\gamma )=1$
for all
 $\gamma \in \Gamma $
, then
$\gamma \in \Gamma $
, then
 $V(\delta )=1$
for some
$V(\delta )=1$
for some
 $\delta \in \Delta $
. In this case, we write
$\delta \in \Delta $
. In this case, we write
 $\mathfrak {A}, V\models \Gamma /\Delta $
. A rule
$\mathfrak {A}, V\models \Gamma /\Delta $
. A rule
 $\Gamma /\Delta $
is valid on a
$\Gamma /\Delta $
is valid on a
 $\nu $
-algebra
$\nu $
-algebra
 $\mathfrak {A}$
when
$\mathfrak {A}$
when
 $\mathfrak {A}, V\models \Gamma /\Delta $
holds for all valuations V on
$\mathfrak {A}, V\models \Gamma /\Delta $
holds for all valuations V on
 $\mathfrak {A}$
. When this holds, we write
$\mathfrak {A}$
. When this holds, we write
 $\mathfrak {A}\vDash \Gamma /\Delta $
, otherwise, we write
$\mathfrak {A}\vDash \Gamma /\Delta $
, otherwise, we write
 $\mathfrak {A}\nvDash \Gamma /\Delta $
and say that
$\mathfrak {A}\nvDash \Gamma /\Delta $
and say that
 $\mathfrak {A}$
refutes
$\mathfrak {A}$
refutes
 $\Gamma /\Delta $
. We can extend this notion of validity to classes of
$\Gamma /\Delta $
. We can extend this notion of validity to classes of
 $\nu $
-algebras in the obvious way.
$\nu $
-algebras in the obvious way.
Write
 $\mathcal {A}_\nu $
for the class of all
$\mathcal {A}_\nu $
for the class of all
 $\nu $
-algebras. For every rule system
$\nu $
-algebras. For every rule system
 $\mathtt {S,}$
we define
$\mathtt {S,}$
we define
 $$\begin{align*}\mathsf{Alg}(\mathtt{S}):=\{\mathfrak{A}\in \mathcal{A}_\nu:\mathfrak{A}\vDash \mathtt{S}\}.\end{align*}$$
$$\begin{align*}\mathsf{Alg}(\mathtt{S}):=\{\mathfrak{A}\in \mathcal{A}_\nu:\mathfrak{A}\vDash \mathtt{S}\}.\end{align*}$$
Conversely, if
 $\mathcal {K}$
is a class of
$\mathcal {K}$
is a class of
 $\nu $
-algebras, we set
$\nu $
-algebras, we set
 $$ \begin{align*} \mathsf{ThR}(\mathcal{K})&:=\{\Gamma/\Delta\in \mathit{Rul}_\nu:\mathcal{K}\vDash \Gamma/\Delta\}. \end{align*} $$
$$ \begin{align*} \mathsf{ThR}(\mathcal{K})&:=\{\Gamma/\Delta\in \mathit{Rul}_\nu:\mathcal{K}\vDash \Gamma/\Delta\}. \end{align*} $$
A variety (resp., universal class) of
 $\nu $
-algebras is a class of
$\nu $
-algebras is a class of
 $\nu $
-algebras closed under homomorphic images, subalgebras, and direct products (resp., under isomorphic copies, subalgebras, and ultraproducts). When
$\nu $
-algebras closed under homomorphic images, subalgebras, and direct products (resp., under isomorphic copies, subalgebras, and ultraproducts). When
 $\mathcal {K}$
is a class of
$\mathcal {K}$
is a class of
 $\nu $
-algebras, we write
$\nu $
-algebras, we write
 $\mathbf {Var}(\mathcal {K})$
and
$\mathbf {Var}(\mathcal {K})$
and
 $\mathbf {Uni}(\mathcal {K}),$
respectively, for the class of subvarieties and of universal subclasses of
$\mathbf {Uni}(\mathcal {K}),$
respectively, for the class of subvarieties and of universal subclasses of
 $\mathcal {K}$
. It is well known that both
$\mathcal {K}$
. It is well known that both
 $\mathbf {Var}(\mathcal {K})$
and
$\mathbf {Var}(\mathcal {K})$
and
 $\mathbf {Uni}(\mathcal {K})$
admit the structure of a complete lattice. The meet operations of
$\mathbf {Uni}(\mathcal {K})$
admit the structure of a complete lattice. The meet operations of
 $\mathbf {Var}(\mathcal {K})$
and
$\mathbf {Var}(\mathcal {K})$
and
 $\mathbf {Uni}(\mathcal {K})$
, denoted
$\mathbf {Uni}(\mathcal {K})$
, denoted
 $\otimes _{\mathbf {Var}(\mathcal {K})}$
and
$\otimes _{\mathbf {Var}(\mathcal {K})}$
and
 $\otimes _{\mathbf {Uni}(\mathcal {K}),}$
respectively, coincide. However, the joins
$\otimes _{\mathbf {Uni}(\mathcal {K}),}$
respectively, coincide. However, the joins
 $\oplus _{\mathbf {Var}(\mathcal {K})}$
and
$\oplus _{\mathbf {Var}(\mathcal {K})}$
and
 $\oplus _{\mathbf {Uni}(\mathcal {K})}$
generally come apart. We can characterize
$\oplus _{\mathbf {Uni}(\mathcal {K})}$
generally come apart. We can characterize
 $\oplus _{\mathbf {Var}(\mathcal {K})}$
in terms of
$\oplus _{\mathbf {Var}(\mathcal {K})}$
in terms of
 $\oplus _{\mathbf {Uni}(\mathcal {K})}$
. For
$\oplus _{\mathbf {Uni}(\mathcal {K})}$
. For
 $\mathcal {U}\in \mathbf {Uni}(\mathcal {K})$
, let
$\mathcal {U}\in \mathbf {Uni}(\mathcal {K})$
, let
 $\mathsf {Var}(\mathcal {U})$
be the least variety in which
$\mathsf {Var}(\mathcal {U})$
be the least variety in which
 $\mathcal {U}$
is contained.
$\mathcal {U}$
is contained.
Proposition 2.4. Let
 $\mathcal {K}$
be a class of
$\mathcal {K}$
be a class of
 $\nu $
-algebras. Then the identity
$\nu $
-algebras. Then the identity
 $$\begin{align*}\oplus_{\mathbf{Var}(\mathcal{K})}\{\mathcal{V}_i:i\in I\}=\mathsf{Var}(\oplus_{\mathbf{Uni}(\mathcal{K})}\{\mathcal{V}_i:i\in I\})\end{align*}$$
$$\begin{align*}\oplus_{\mathbf{Var}(\mathcal{K})}\{\mathcal{V}_i:i\in I\}=\mathsf{Var}(\oplus_{\mathbf{Uni}(\mathcal{K})}\{\mathcal{V}_i:i\in I\})\end{align*}$$
holds for any
 $\{\mathcal {V}_i:i\in I\}\subseteq \mathbf {Var}(\mathcal {K})$
.
$\{\mathcal {V}_i:i\in I\}\subseteq \mathbf {Var}(\mathcal {K})$
.
Proof. Analogous to that of Proposition 2.3.
Throughout the article, we study the structure of lattices of rule systems via semantic methods. This is made possible by the following fundamental result connecting the syntactic types of rule system to closure conditions on the classes of algebras that validate them. Item 1 is widely known as Birkhoff’s theorem, after [Reference Birkhoff9].
Theorem 2.5 [Reference Burris and Sankappanavar11, Theorems II.11.9 and V.2.20].
For every class
 $\mathcal {K}$
of
$\mathcal {K}$
of
 $\nu $
-algebras, the following conditions hold:
$\nu $
-algebras, the following conditions hold:
-
(1)
$\mathcal {K}$
is a variety iff
$\mathcal {K}=\mathsf {Alg}(\mathtt {S})$
for some set of
$\nu $
-formulae
$\mathtt {S}$
; -
(2)
$\mathcal {K}$
is a universal class iff
$\mathcal {K}=\mathsf {Alg}(\mathtt {S})$
for some set of
$\nu $
-rules
$\mathtt {S}$
.








In this sense,
 $\nu $
-logics correspond to varieties of
$\nu $
-logics correspond to varieties of
 $\nu $
-algebras, whereas
$\nu $
-algebras, whereas
 $\nu $
-rule systems correspond to universal classes of
$\nu $
-rule systems correspond to universal classes of
 $\nu $
-algebras.
$\nu $
-algebras.
We now briefly describe the classes of algebras we shall use to interpret the rule systems under discussion in more detail, and review some of their basic properties. For further details on these structures, we point the reader to [Reference Chagrov and Zakharyaschev14, Reference Esakia20, Reference Esakia21, Reference Kowalski30, Reference Pedroso De Lima Martins35, Reference Rauszer37, Reference Venema, Blackburn, van Benthem and Wolter41].
A Heyting algebra is a tuple
 $\mathfrak {H}=(H, \land , \lor , \to , 0, 1)$
such that
$\mathfrak {H}=(H, \land , \lor , \to , 0, 1)$
such that
 $(H, \land , \lor , 0, 1)$
is a bounded distributive lattice and for every
$(H, \land , \lor , 0, 1)$
is a bounded distributive lattice and for every
 $a, b, c\in A,$
we have
$a, b, c\in A,$
we have
 $$\begin{align*}c\leq a\to b\iff a\land c\leq b.\end{align*}$$
$$\begin{align*}c\leq a\to b\iff a\land c\leq b.\end{align*}$$
A bi-Heyting algebra is a tuple
 $\mathfrak {H}=(H, \land , \lor , \to ,\leftarrow , 0, 1)$
such that the
$\mathfrak {H}=(H, \land , \lor , \to ,\leftarrow , 0, 1)$
such that the
 $\leftarrow $
-free reduct of
$\leftarrow $
-free reduct of
 $\mathfrak {H}$
is a Heyting algebra, and such that for all
$\mathfrak {H}$
is a Heyting algebra, and such that for all
 $a, b, c\in H,$
we have
$a, b, c\in H,$
we have
 $$\begin{align*}a\leftarrow b\leq c\iff a\leq b\lor c.\end{align*}$$
$$\begin{align*}a\leftarrow b\leq c\iff a\leq b\lor c.\end{align*}$$
Equivalently, a bi-Heyting algebra can be defined as a Heyting algebra
 $\mathfrak {H}$
whose order dual is also a Heyting algebra, whose implication is defined by the identity
$\mathfrak {H}$
whose order dual is also a Heyting algebra, whose implication is defined by the identity
 $$\begin{align*}a\leftarrow b:=\bigwedge\{c\in H:a\leq b\lor c\}.\end{align*}$$
$$\begin{align*}a\leftarrow b:=\bigwedge\{c\in H:a\leq b\lor c\}.\end{align*}$$
A modal algebra is a tuple
 $\mathfrak {M}=(M, \land , \lor , \neg , \square , 0, 1)$
such that
$\mathfrak {M}=(M, \land , \lor , \neg , \square , 0, 1)$
such that
 $(M, \land , \lor , \neg , 0, 1)$
is a Boolean algebra and the following equations hold:
$(M, \land , \lor , \neg , 0, 1)$
is a Boolean algebra and the following equations hold:
 $$ \begin{align} \square 1&=1, \end{align} $$
$$ \begin{align} \square 1&=1, \end{align} $$
 $$ \begin{align} \square(a\land b)&=\square a\land \square b. \end{align} $$
$$ \begin{align} \square(a\land b)&=\square a\land \square b. \end{align} $$
In any modal algebra
 $\mathfrak {M,}$
we can define the compound modality
$\mathfrak {M,}$
we can define the compound modality
 $$ \begin{align} \square^+a:=\square a \land a. \end{align} $$
$$ \begin{align} \square^+a:=\square a \land a. \end{align} $$
A tense algebra is a structure
 $\mathfrak {M}=(M, \land , \lor , \neg , \square , \blacklozenge , 0, 1)$
, such that both the
$\mathfrak {M}=(M, \land , \lor , \neg , \square , \blacklozenge , 0, 1)$
, such that both the
 $\square $
-free and the
$\square $
-free and the
 $\blacklozenge $
-free reducts of
$\blacklozenge $
-free reducts of
 $\mathfrak {M}$
are modal algebras (the former with respect to the dual of
$\mathfrak {M}$
are modal algebras (the former with respect to the dual of
 $\blacklozenge $
), and
$\blacklozenge $
), and
 $\square , \blacklozenge $
form a residual pair. That is, for all
$\square , \blacklozenge $
form a residual pair. That is, for all
 $a, b\in M,$
we have the following identity:
$a, b\in M,$
we have the following identity:
 $$ \begin{align} \blacklozenge a \leq b\iff a\leq \square y. \end{align} $$
$$ \begin{align} \blacklozenge a \leq b\iff a\leq \square y. \end{align} $$
Finally, a frontal Heyting algebra is a structure
 $\mathfrak {H}=(H, \land , \lor , \to ,\boxtimes , 0, 1)$
whose
$\mathfrak {H}=(H, \land , \lor , \to ,\boxtimes , 0, 1)$
whose
 $\boxtimes $
-free reduct is a Heyting algebra and such that
$\boxtimes $
-free reduct is a Heyting algebra and such that
 $\boxtimes $
satisfies the identities (3) and (4), as well as the following inequalities:
$\boxtimes $
satisfies the identities (3) and (4), as well as the following inequalities:
 $$ \begin{align} a&\leq \boxtimes a, \end{align} $$
$$ \begin{align} a&\leq \boxtimes a, \end{align} $$
 $$ \begin{align} \boxtimes a&\leq b\lor (b\to a). \end{align} $$
$$ \begin{align} \boxtimes a&\leq b\lor (b\to a). \end{align} $$
We write
 $\mathsf {HA}, \mathsf {biHA}, \mathsf {MA}, \mathsf {Ten}$
, and
$\mathsf {HA}, \mathsf {biHA}, \mathsf {MA}, \mathsf {Ten}$
, and
 $\mathsf {FHA}$
for the classes of Heyting algebras, bi-Heyting algebras, modal algebras, tense algebras, and frontal Heyting algebras, respectively. It is well known that all these classes are equationally definable, hence varieties by Theorem 2.5. What is more, their universal subclasses are algebraic counterparts of the rule systems introduced in the previous section, in the sense spelled out by the following theorem.
$\mathsf {FHA}$
for the classes of Heyting algebras, bi-Heyting algebras, modal algebras, tense algebras, and frontal Heyting algebras, respectively. It is well known that all these classes are equationally definable, hence varieties by Theorem 2.5. What is more, their universal subclasses are algebraic counterparts of the rule systems introduced in the previous section, in the sense spelled out by the following theorem.
Theorem 2.6. The following maps are pairs of mutually inverse dual isomorphisms:
-
•
$\mathsf {Alg}:\mathbf {Ext}(\mathtt {IPC})\to \mathbf {Uni}(\mathsf {HA})$
and
$\mathsf {ThR}:\mathbf {Uni}(\mathsf {HA})\to \mathbf {Ext}(\mathtt {IPC})$
; -
•
$\mathsf {Alg}:\mathbf {Ext}(\mathtt {biIPC})\to \mathbf {Uni}(\mathsf {biHA})$
and
$\mathsf {ThR}:\mathbf {Uni}(\mathsf {biHA})\to \mathbf {Ext}(\mathtt {biIPC})$
; -
•
$\mathsf {Alg}:\mathbf {NExt}(\mathtt {K})\to \mathbf {Uni}(\mathsf {MA})$
and
$\mathsf {ThR}:\mathbf {Uni}(\mathsf {MA})\to \mathbf {NExt}(\mathtt {K})$
; -
•
$\mathsf {Alg}:\mathbf {NExt}(\mathtt {K.t})\to \mathbf {Uni}(\mathsf {Ten})$
and
$\mathsf {ThR}:\mathbf {Uni}(\mathsf {Ten})\to \mathbf {NExt}(\mathtt {K.t})$
; -
•
$\mathsf {Alg}:\mathbf {NExt}(\mathtt {IPCK})\to \mathbf {Uni}(\mathsf {FHA})$
and
$\mathsf {ThR}:\mathbf {Uni}(\mathsf {FHA})\to \mathbf {NExt}(\mathtt {IPCK})$
.










Furthermore, the items above remain true when we substitute
 $\mathbf {NExtL} ($
resp.,
$\mathbf {NExtL} ($
resp.,
 $\mathbf {ExtL})$
for
$\mathbf {ExtL})$
for
 $\mathbf {NExt} ($
resp.,
$\mathbf {NExt} ($
resp.,
 $\mathbf {Ext})$
and
$\mathbf {Ext})$
and
 $\mathbf {Var}$
for
$\mathbf {Var}$
for
 $\mathbf {Uni}$
.
$\mathbf {Uni}$
.
Corollary 2.7. Every si (resp., bsi, modal, tense, and msi) rule system
 $\mathtt {L}$
is complete with respect to some universal class of Heyting (resp., bi-Heyting, modal, tense, and frontal Heyting) algebras. Moreover, if
$\mathtt {L}$
is complete with respect to some universal class of Heyting (resp., bi-Heyting, modal, tense, and frontal Heyting) algebras. Moreover, if
 $\mathtt {L}$
is a logic, then (by Theorem 2.5) it is complete with respect to a variety of algebras of the appropriate kind.
$\mathtt {L}$
is a logic, then (by Theorem 2.5) it is complete with respect to a variety of algebras of the appropriate kind.
Lastly, we introduce some uniform notation to refer to the non truth-functional operations of a
 $\nu $
-algebra. For
$\nu $
-algebra. For
 $\mathfrak {A}$
a
$\mathfrak {A}$
a
 $\nu $
-algebra, let
$\nu $
-algebra, let
 $$\begin{align*}\mathit{op}(\mathfrak{A}):=\begin{cases} \{\to \} &\text{if }\mathfrak{A}\in \mathsf{HA},\\ \{\to, \leftarrow \} &\text{if }\mathfrak{A}\in \mathsf{biHA},\\ \{\square \} &\text{if }\mathfrak{A}\in \mathsf{MA},\\ \{\square, \blacklozenge \} &\text{if }\mathfrak{A}\in \mathsf{Ten},\\ \{\to, \boxtimes \} &\text{if }\mathfrak{A}\in \mathsf{FHA.} \end{cases}\end{align*}$$
$$\begin{align*}\mathit{op}(\mathfrak{A}):=\begin{cases} \{\to \} &\text{if }\mathfrak{A}\in \mathsf{HA},\\ \{\to, \leftarrow \} &\text{if }\mathfrak{A}\in \mathsf{biHA},\\ \{\square \} &\text{if }\mathfrak{A}\in \mathsf{MA},\\ \{\square, \blacklozenge \} &\text{if }\mathfrak{A}\in \mathsf{Ten},\\ \{\to, \boxtimes \} &\text{if }\mathfrak{A}\in \mathsf{FHA.} \end{cases}\end{align*}$$
2.3. Geometric semantics and duality
All the rule systems mentioned so far also admit a more suggestive geometric-topological semantics, which we shall rely on in the proofs of several results. We sketch this semantics here and relate the basic topological structures it involves to their algebraic counterparts.
A Stone space is a compact Hausdorff space with a basis of clopens. The topological structures we shall work with are all expansions of Stone spaces with one or more binary relations satisfying various conditions. For each of the signatures
 $\nu $
presented earlier, there is a corresponding class of such spaces, which for the moment we call
$\nu $
presented earlier, there is a corresponding class of such spaces, which for the moment we call
 $\nu $
-spaces. When
$\nu $
-spaces. When
 $\mathfrak {X}:=(X, \preceq _1, \ldots , \preceq _n, \mathcal {O})$
is a
$\mathfrak {X}:=(X, \preceq _1, \ldots , \preceq _n, \mathcal {O})$
is a
 $\nu $
-space we let
$\nu $
-space we let
 $\mathsf {Clop}(\mathfrak {X})$
denote the set of clopen subsets of
$\mathsf {Clop}(\mathfrak {X})$
denote the set of clopen subsets of
 $\mathfrak {X}$
, and let
$\mathfrak {X}$
, and let
 $\mathsf {ClopUp}_{\preceq _i}(\mathfrak {X})$
denote the set of clopen upsets of
$\mathsf {ClopUp}_{\preceq _i}(\mathfrak {X})$
denote the set of clopen upsets of
 $\mathfrak {X}$
with respect to the relation
$\mathfrak {X}$
with respect to the relation
 $\preceq _i$
, i.e., those elements of
$\preceq _i$
, i.e., those elements of
 $\mathsf {Clop}(\mathfrak {X})$
which are upward-closed with respect to the relation
$\mathsf {Clop}(\mathfrak {X})$
which are upward-closed with respect to the relation
 $\preceq _i$
. Moreover, for
$\preceq _i$
. Moreover, for
 $U\subseteq X,$
we write
$U\subseteq X,$
we write

In case
 $U=\{x\},$
we write
$U=\{x\},$
we write ![]() and
and ![]() instead of
instead of ![]() and
and ![]() . When the space in question is only equipped with one relation or when the relation in question is clear from context, we may omit the subscripts from any of these operations.
. When the space in question is only equipped with one relation or when the relation in question is clear from context, we may omit the subscripts from any of these operations.
We now describe these spaces in more detail. An Esakia space is a triple
 $\mathfrak {X}=(X, \leq , \mathcal {O})$
such that
$\mathfrak {X}=(X, \leq , \mathcal {O})$
such that
 $(X, \mathcal {O})$
is a Stone space and
$(X, \mathcal {O})$
is a Stone space and
 $\leq $
is a partial order satisfying the following conditions:
$\leq $
is a partial order satisfying the following conditions:
-
(1)
is closed for every
$x\in X$
; -
(2)
for every
$U\in \mathsf {Clop}(\mathfrak {X})$
.


If, in addition, the structure
 $\mathfrak {X}^{-1}=(X, \geq , \mathcal {O})$
is also an Esakia space, where
$\mathfrak {X}^{-1}=(X, \geq , \mathcal {O})$
is also an Esakia space, where
 $\geq $
is the converse of
$\geq $
is the converse of
 $\leq $
, then we call
$\leq $
, then we call
 $\mathfrak {X}$
a bi-Esakia space.
$\mathfrak {X}$
a bi-Esakia space.
A modal space is a triple
 $\mathfrak {X}=(X, R, \mathcal {O})$
such that
$\mathfrak {X}=(X, R, \mathcal {O})$
such that
 $(X, \mathcal {O})$
is a Stone space and R is a binary relation—not necessarily reflexive and transitive—satisfying conditions (1) and (2) above. When the structure
$(X, \mathcal {O})$
is a Stone space and R is a binary relation—not necessarily reflexive and transitive—satisfying conditions (1) and (2) above. When the structure
 $\mathfrak {X}^{-1}=(X, \breve {R}, \mathcal {O})$
is also a modal space, where
$\mathfrak {X}^{-1}=(X, \breve {R}, \mathcal {O})$
is also a modal space, where
 $\breve {R}$
is the converse of R, we call
$\breve {R}$
is the converse of R, we call
 $\mathfrak {X}$
a tense space.
$\mathfrak {X}$
a tense space.
Finally, a modalized Esakia space is a quadruple
 $\mathfrak {X}=(X, \leq , \sqsubseteq , \mathcal {O})$
such that
$\mathfrak {X}=(X, \leq , \sqsubseteq , \mathcal {O})$
such that
 ${(X, \leq , \mathcal {O})}$
is an Esakia space and the following conditions hold:
${(X, \leq , \mathcal {O})}$
is an Esakia space and the following conditions hold:
-
(1)
whenever ; -
(2) the reflexive closure of
$\sqsubseteq $
coincides with
$\leq $
.


Let
 $\mathfrak {X}=(X, \preceq _1, \ldots , \preceq _n, \mathcal {O})$
and
$\mathfrak {X}=(X, \preceq _1, \ldots , \preceq _n, \mathcal {O})$
and
 $\mathfrak {X}'=(X', \preceq ^{\prime }_1, \ldots , \preceq ^{\prime }_n, \mathcal {O}')$
be
$\mathfrak {X}'=(X', \preceq ^{\prime }_1, \ldots , \preceq ^{\prime }_n, \mathcal {O}')$
be
 $\nu $
-spaces. A mapping
$\nu $
-spaces. A mapping
 $f:\mathfrak {X}\to \mathfrak {X}'$
is called a
$f:\mathfrak {X}\to \mathfrak {X}'$
is called a
 $\nu $
bounded morphism when it is continuous and satisfies the conditions below for all
$\nu $
bounded morphism when it is continuous and satisfies the conditions below for all
 $x, y\in X$
and each
$x, y\in X$
and each
 $i\leq n$
:
$i\leq n$
:
-
(1)
$x\preceq _i y$
only if
$f(x)\preceq ^{\prime }_i f(y)$
; -
(2)
$f(x)\preceq ^{\prime }_i f(y)$
only if there is
$z\in f^{-1}(y)$
such that
$x\preceq _i z$
.





In the special case where
 $\nu \in \{\mathit {bsi, ten}\}$
, we must, in addition, require that the above conditions hold for the converses of
$\nu \in \{\mathit {bsi, ten}\}$
, we must, in addition, require that the above conditions hold for the converses of
 $\preceq , \preceq '$
.
$\preceq , \preceq '$
.
We now describe how to interpret
 $\nu $
-rule systems over
$\nu $
-rule systems over
 $\nu $
-spaces. Let
$\nu $
-spaces. Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\nu $
-space. If
$\nu $
-space. If
 $\nu \in \{\mathit {si, bsi, msi}\}$
, a
$\nu \in \{\mathit {si, bsi, msi}\}$
, a
 $\nu $
-valuation on
$\nu $
-valuation on
 $\mathfrak {X}$
is a mapping
$\mathfrak {X}$
is a mapping ![]() that commutes with the connectives in
that commutes with the connectives in
 $\nu $
in the usual way. On the other hand, if
$\nu $
in the usual way. On the other hand, if
 $\nu \in \{\mathit {md}, \mathit {ten}\}$
, a
$\nu \in \{\mathit {md}, \mathit {ten}\}$
, a
 $\nu $
-valuation on
$\nu $
-valuation on
 $\mathfrak {X}$
is defined in a similar way, except that we require V to range over
$\mathfrak {X}$
is defined in a similar way, except that we require V to range over ![]() instead of
instead of ![]() . We list below how valuations commute with the most important connectives.
. We list below how valuations commute with the most important connectives.
Here and throughout the article, we use
 $-$
and
$-$
and
 $\smallsetminus $
to denote, respectively, the set-theoretic relative complement and difference operations.
$\smallsetminus $
to denote, respectively, the set-theoretic relative complement and difference operations.
Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\nu $
-space and V a valuation on it. A formula
$\nu $
-space and V a valuation on it. A formula
 $\varphi $
is satisfied on a model
$\varphi $
is satisfied on a model
 $(\mathfrak {X}, V)$
at a point x if
$(\mathfrak {X}, V)$
at a point x if
 $x\in V(\varphi )$
. In this case, we write
$x\in V(\varphi )$
. In this case, we write
 $\mathfrak {X}, V, x\vDash \varphi $
, otherwise, we write
$\mathfrak {X}, V, x\vDash \varphi $
, otherwise, we write
 $\mathfrak {X}, V, x\nvDash \varphi $
and say that the model
$\mathfrak {X}, V, x\nvDash \varphi $
and say that the model
 $(\mathfrak {X}, V)$
refutes
$(\mathfrak {X}, V)$
refutes
 $\varphi $
at a point x. A rule
$\varphi $
at a point x. A rule
 $\Gamma /\Delta $
is valid on a model
$\Gamma /\Delta $
is valid on a model
 $(\mathfrak {X}, V)$
when the following holds: if
$(\mathfrak {X}, V)$
when the following holds: if
 $\mathfrak {X}, V, x\vDash \gamma $
holds for each
$\mathfrak {X}, V, x\vDash \gamma $
holds for each
 $x\in X$
and every
$x\in X$
and every
 $\gamma \in \Gamma $
, then there is some
$\gamma \in \Gamma $
, then there is some
 $\delta \in \Delta $
such that
$\delta \in \Delta $
such that
 $\mathfrak {X}, V, x\vDash \delta $
holds for each
$\mathfrak {X}, V, x\vDash \delta $
holds for each
 $x\in X$
. In this case, we write
$x\in X$
. In this case, we write
 $\mathfrak {X}, V\vDash \Gamma /\Delta $
, otherwise, we write
$\mathfrak {X}, V\vDash \Gamma /\Delta $
, otherwise, we write
 $\mathfrak {X}, V\nvDash \Gamma /\Delta $
and say that the model
$\mathfrak {X}, V\nvDash \Gamma /\Delta $
and say that the model
 $(\mathfrak {X}, V)$
refutes
$(\mathfrak {X}, V)$
refutes
 $\varphi $
. A rule
$\varphi $
. A rule
 $\Gamma /\Delta $
is valid on a
$\Gamma /\Delta $
is valid on a
 $\nu $
-space
$\nu $
-space
 $\mathfrak {X}$
if it is valid on the model
$\mathfrak {X}$
if it is valid on the model
 $(\mathfrak {X}, V)$
for every valuation V on
$(\mathfrak {X}, V)$
for every valuation V on
 $\mathfrak {X}$
, otherwise
$\mathfrak {X}$
, otherwise
 $\mathfrak {X}$
refutes
$\mathfrak {X}$
refutes
 $\Gamma /\Delta $
. We write
$\Gamma /\Delta $
. We write
 $\mathfrak {X}\vDash \Gamma /\Delta $
to mean that
$\mathfrak {X}\vDash \Gamma /\Delta $
to mean that
 $\Gamma /\Delta $
is valid on
$\Gamma /\Delta $
is valid on
 $\mathfrak {X}$
, and
$\mathfrak {X}$
, and
 $\mathfrak {X}\nvDash \Gamma /\Delta $
to mean that
$\mathfrak {X}\nvDash \Gamma /\Delta $
to mean that
 $\mathfrak {X}$
refutes
$\mathfrak {X}$
refutes
 $\Gamma /\Delta $
. The notion of validity generalizes to classes of
$\Gamma /\Delta $
. The notion of validity generalizes to classes of
 $\nu $
-spaces, as well as to classes of rules, in the obvious way.
$\nu $
-spaces, as well as to classes of rules, in the obvious way.
For each of the signatures
 $\nu $
we shall work with, there is a duality result connecting
$\nu $
we shall work with, there is a duality result connecting
 $\nu $
-algebras to
$\nu $
-algebras to
 $\nu $
-spaces. All these dualities are generalizations of Stone duality, which relates the category of Boolean algebras with homomorphisms to that of Stone spaces with continuous functions [Reference Johnstone28]. We list these dualities in the following theorem.
$\nu $
-spaces. All these dualities are generalizations of Stone duality, which relates the category of Boolean algebras with homomorphisms to that of Stone spaces with continuous functions [Reference Johnstone28]. We list these dualities in the following theorem.
Theorem 2.8. The category of modal (resp., Heyting, tense, bi-Heyting, and frontal Heyting) algebras with homomorphisms is dually equivalent to the category of modal (resp., Esakia, tense, bi-Esakia, and modalized Esakia) spaces with bounded morphisms.
In each of these cases, we write
 $\mathfrak {A}_*$
for the space dual to an algebra
$\mathfrak {A}_*$
for the space dual to an algebra
 $\mathfrak {A}$
and
$\mathfrak {A}$
and
 $\mathfrak {X}^*$
for the algebra dual to a space
$\mathfrak {X}^*$
for the algebra dual to a space
 $\mathfrak {X}$
. The space
$\mathfrak {X}$
. The space
 $\mathfrak {\mathfrak {A}}_*$
is always an expansion of the space of prime filters of
$\mathfrak {\mathfrak {A}}_*$
is always an expansion of the space of prime filters of
 $\mathfrak {A}$
. We write
$\mathfrak {A}$
. We write
 $\beta $
for the map, called the Stone map, which takes element a and returns the set
$\beta $
for the map, called the Stone map, which takes element a and returns the set
 $\beta (a)$
of prime filters in that algebras that contain a. In the other direction, the algebra
$\beta (a)$
of prime filters in that algebras that contain a. In the other direction, the algebra
 $\mathfrak {\mathfrak {X}}^*$
is constructed by taking clopen sets (if
$\mathfrak {\mathfrak {X}}^*$
is constructed by taking clopen sets (if
 $\nu \in \{\mathit {md, ten}\}$
) or clopen upsets (if
$\nu \in \{\mathit {md, ten}\}$
) or clopen upsets (if
 $\nu \in \{\mathit {si, bsi, msi}\}$
). We refer the reader to [Reference Castiglioni, Sagastume and San Martín12, Reference Esakia17, Reference Esakia18, Reference Sambin and Vaccaro38] for detailed descriptions and proofs of these dualities.
$\nu \in \{\mathit {si, bsi, msi}\}$
). We refer the reader to [Reference Castiglioni, Sagastume and San Martín12, Reference Esakia17, Reference Esakia18, Reference Sambin and Vaccaro38] for detailed descriptions and proofs of these dualities.
2.4. Kripke semantics
Besides spaces, in Sections 4 and 5, we shall also work with Kripke frames. We will only use Kripke frames to interpret si, bsi, modal, and tense rule systems. Thus we define a Kripke frame to be a set
 $\mathfrak {X}:=(X, \preceq )$
, where X is a non-empty set and
$\mathfrak {X}:=(X, \preceq )$
, where X is a non-empty set and
 $\preceq $
is a binary relation on X. An intuitionistic Kripke frame is a Kripke frame
$\preceq $
is a binary relation on X. An intuitionistic Kripke frame is a Kripke frame
 $\mathfrak {X}:=(X, \leq )$
, where
$\mathfrak {X}:=(X, \leq )$
, where
 $\leq $
is a partial order. The notions of
$\leq $
is a partial order. The notions of
 $\nu $
bounded morphism for
$\nu $
bounded morphism for
 $\nu \in \{\mathit {md, ten, si, bsi}\}$
are defined the same way as for spaces, but omitting the requirement of continuity.
$\nu \in \{\mathit {md, ten, si, bsi}\}$
are defined the same way as for spaces, but omitting the requirement of continuity.
For
 $\nu \in \{\mathit {md}, \mathit {ten}\}$
, a
$\nu \in \{\mathit {md}, \mathit {ten}\}$
, a
 $\nu $
-valuation on a Kripke frame
$\nu $
-valuation on a Kripke frame
 $\mathfrak {X}$
is a mapping
$\mathfrak {X}$
is a mapping
 $V:\mathit {Frm}_\nu \to \wp (X)$
that commutes with the connectives in
$V:\mathit {Frm}_\nu \to \wp (X)$
that commutes with the connectives in
 $\nu $
in the usual way. For
$\nu $
in the usual way. For
 $\nu \in \{\mathit {si, bsi}\}$
,
$\nu \in \{\mathit {si, bsi}\}$
,
 $\nu $
-valuation on an intuitionistic Kripke frame
$\nu $
-valuation on an intuitionistic Kripke frame
 $\mathfrak {X}$
is a mapping
$\mathfrak {X}$
is a mapping
 $V:\mathit {Frm}_\nu \to \wp (X)$
that commutes with the connectives in
$V:\mathit {Frm}_\nu \to \wp (X)$
that commutes with the connectives in
 $\nu $
in the usual way, such that
$\nu $
in the usual way, such that ![]() for every
for every
 $\varphi \in \mathit {Frm}_\nu $
. We extend our notions of satisfaction and validity from spaces to Kripke frames in the obvious way.
$\varphi \in \mathit {Frm}_\nu $
. We extend our notions of satisfaction and validity from spaces to Kripke frames in the obvious way.
We recall briefly the following duality results concerning Kripke frames, which were first proved, respectively, in [Reference de Jongh and Troelstra29, Reference Thomason40] (see also [Reference Litak33]).
Theorem 2.9. The following categories are dually equivalent.
-
(1) Kripke frames with modal (resp., tense) bounded morphisms and complete, atomic, completely additive, and completely distributive modal (resp., tense) algebras with complete homomorphisms;
-
(2) Intuitionistic Kripke frames with si (resp., bsi) bounded morphisms and complete, completely distributive, and completely join prime generated Heyting (resp., bi-Heyting) algebras with complete homomorphisms.
We write
 $\mathfrak {A}_+$
for the Kripke frame dual to an algebra
$\mathfrak {A}_+$
for the Kripke frame dual to an algebra
 $\mathfrak {A}$
among those mentioned in the theorem above, and
$\mathfrak {A}$
among those mentioned in the theorem above, and
 $\mathfrak {X}^+$
for the algebra dual to a Kripke frame
$\mathfrak {X}^+$
for the algebra dual to a Kripke frame
 $\mathfrak {X}$
. The signature of
$\mathfrak {X}$
. The signature of
 $\mathfrak {X}^+$
will be clear from context. The Kripke frame
$\mathfrak {X}^+$
will be clear from context. The Kripke frame
 $\mathfrak {A}_+$
is constructed by expanding the set of completely join prime filters of
$\mathfrak {A}_+$
is constructed by expanding the set of completely join prime filters of
 $\mathfrak {A}$
with a binary relation, which is defined the same way as in the dualities from Theorem 2.8. The algebra
$\mathfrak {A}$
with a binary relation, which is defined the same way as in the dualities from Theorem 2.8. The algebra
 $\mathfrak {X}^+$
is constructed the same way as
$\mathfrak {X}^+$
is constructed the same way as
 $\mathfrak {Y}^*$
when
$\mathfrak {Y}^*$
when
 $\mathfrak {Y}$
is a space, but taking subsets (resp., upsets) instead of clopen subsets (resp., clopen upsets).
$\mathfrak {Y}$
is a space, but taking subsets (resp., upsets) instead of clopen subsets (resp., clopen upsets).
Convention 2.10. Before moving on, we introduce a notational convention we shall use throughout the article to discuss related rule systems and structures while avoiding cumbersome repetitions. The convention consists of the use of parentheticals in expressions naming rule systems, mathematical structures, and classes thereof. For example, we will use the expression ‘
 $\mathtt {S4(.t)}$
’ to refer simultaneously to the rule systems
$\mathtt {S4(.t)}$
’ to refer simultaneously to the rule systems
 $\mathtt {S4}$
and
$\mathtt {S4}$
and
 $\mathtt {S4.t}$
. Similarly, we will use the expression ‘(bi-)Heyting algebras’ to refer simultaneously to Heyting and bi-Heyting algebras.
$\mathtt {S4.t}$
. Similarly, we will use the expression ‘(bi-)Heyting algebras’ to refer simultaneously to Heyting and bi-Heyting algebras.
We use these parentheticals in the same way parentheticals of the form “(resp., …)” are normally used. To illustrate, Item 2 in Theorem 2.9 can be rewritten, using the convention just introduced, in the following way:
The following categories are dually equivalent: intuitionistic Kripke frames with (b)si bounded morphisms and complete, completely join prime generated (bi-)Heyting algebras with complete homomorphisms.
2.5. Transitive structures
We close our preliminaries by reviewing some classes of transitive structures we shall encounter throughout the article. Let us first introduce some more notational conventions. We refer to an algebra in
 $\mathsf {Alg}(\mathtt {S})$
as an
$\mathsf {Alg}(\mathtt {S})$
as an
 $\mathtt {S}$
-algebra. Similarly, we let an
$\mathtt {S}$
-algebra. Similarly, we let an
 $\mathtt {S}$
-space be a space in
$\mathtt {S}$
-space be a space in
 $\mathsf {Spa}(\mathtt {S})$
, and an
$\mathsf {Spa}(\mathtt {S})$
, and an
 $\mathtt {S}$
-frame be a Kripke frame that validates every rule in
$\mathtt {S}$
-frame be a Kripke frame that validates every rule in
 $\mathtt {S}$
—with the additional requirement that an
$\mathtt {S}$
—with the additional requirement that an
 $\mathtt {S}$
-frame be intuitionistic when
$\mathtt {S}$
-frame be intuitionistic when
 $\mathtt {S}$
is a (b)si logic.
$\mathtt {S}$
is a (b)si logic.
We recall that the
 $\mathtt {K4(.t)}$
-spaces can be characterized as those modal (resp., tense) spaces with a transitive relation, and that the
$\mathtt {K4(.t)}$
-spaces can be characterized as those modal (resp., tense) spaces with a transitive relation, and that the
 $\mathtt {S4(.t)}$
-spaces coincide with those
$\mathtt {S4(.t)}$
-spaces coincide with those
 $\mathtt {K4(.t)}$
-spaces where the relation is, in addition, reflexive. We recall some well-known properties of these spaces. Given a preordered set
$\mathtt {K4(.t)}$
-spaces where the relation is, in addition, reflexive. We recall some well-known properties of these spaces. Given a preordered set
 $(X, R)$
, we define:
$(X, R)$
, we define:

We omit subscripts when they can be inferred from context.
Proposition 2.11. Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\mathtt {K4}$
-space. Then the following conditions hold for every
$\mathtt {K4}$
-space. Then the following conditions hold for every
 $x\in X$
and each
$x\in X$
and each ![]() .
.
-
(1)
$\mathit {qmax}(U)$
is closed; -
(2) If
$x\in U$
, then either
$x\in \mathit {max}(U)$
or there is
$y\in \mathit {qmax}(U)$
such that
$Rxy$
; -
(3) When
$\mathfrak {X}$
is an
$\mathtt {S4}$
-space, Item 2 can be strengthened to the following: if
$x\in U$
, then there is
$y\in \mathit {qmax}(U)$
such that
$Rxy$
; -
(4) When
$\mathfrak {X}$
is an
$\mathtt {S4.t}$
-space, Items 1 and 3 remain true if we substitute
$\mathit {qmax}(U)$
for
$\mathit {qmin}(U)$
and
$Rxy$
for
$Ryx$
.
















Among
 $\mathtt {S4(.t)}$
-spaces, we shall pay particular attention to
$\mathtt {S4(.t)}$
-spaces, we shall pay particular attention to
 $\mathtt {Grz(.t)}$
-spaces. We recall some of their basic properties. Given a preordered set
$\mathtt {Grz(.t)}$
-spaces. We recall some of their basic properties. Given a preordered set
 $(X, R)$
and
$(X, R)$
and
 $U\subseteq X$
, we call an element
$U\subseteq X$
, we call an element
 $x\in U$
passive in U when there is no
$x\in U$
passive in U when there is no
 $y\in X\smallsetminus U$
such that
$y\in X\smallsetminus U$
such that
 $Rxy$
and
$Rxy$
and
 $Ryz$
for some
$Ryz$
for some
 $z\in U$
. In other words, x is passive in U when one cannot “leave” and “re-enter” U starting from x. A cluster in
$z\in U$
. In other words, x is passive in U when one cannot “leave” and “re-enter” U starting from x. A cluster in
 $(X, R)$
is a set
$(X, R)$
is a set
 $C\subseteq X$
which is maximal with the property that
$C\subseteq X$
which is maximal with the property that
 $Rxy$
and
$Rxy$
and
 $Ryx$
whenever
$Ryx$
whenever
 $x, y\in C$
. A set
$x, y\in C$
. A set
 $U\subseteq {X}$
is said to cut a cluster
$U\subseteq {X}$
is said to cut a cluster
 $C\subseteq X$
when neither
$C\subseteq X$
when neither
 $C\subseteq U$
nor
$C\subseteq U$
nor
 $C\cap U=\varnothing $
hold.
$C\cap U=\varnothing $
hold.
Theorem 2.12 [Reference Esakia21, Theorem 3.5.5].
Let
 $\mathfrak {X}$
be an
$\mathfrak {X}$
be an
 $\mathtt {S4(.t)}$
-space. Then
$\mathtt {S4(.t)}$
-space. Then
 $\mathfrak {X}$
is a
$\mathfrak {X}$
is a
 $\mathtt {Grz(.t)}$
-space if and only if for every
$\mathtt {Grz(.t)}$
-space if and only if for every ![]() and any
and any
 $x\in U$
, there is a
$x\in U$
, there is a
 $y\in U$
such that
$y\in U$
such that
 $Rxy$
and y is passive in
$Rxy$
and y is passive in
 $U ($
and there is some
$U ($
and there is some
 $z\in U$
such that
$z\in U$
such that
 $Rzx$
and z is passive in U with respect to the converse of
$Rzx$
and z is passive in U with respect to the converse of
 $R)$
.
$R)$
.
Corollary 2.13 [Reference Esakia21, Theorem 3.5.6].
Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\mathtt {Grz}$
-spaces and
$\mathtt {Grz}$
-spaces and ![]() . The following conditions hold:
. The following conditions hold:
-
(1)
$\mathit {qmax}(U)=\mathit {max}(U)$
; -
(2)
$\mathit {max}(U)$
does not cut any cluster.


Moreover, if
 $\mathfrak {X}$
is also a
$\mathfrak {X}$
is also a
 $\mathtt {Grz.t}$
-space, the conditions above continue to hold when we substitute
$\mathtt {Grz.t}$
-space, the conditions above continue to hold when we substitute
 $\mathit {qmin}(U)$
for
$\mathit {qmin}(U)$
for
 $\mathit {qmax}(U)$
and
$\mathit {qmax}(U)$
and
 $\mathit {min}(U)$
for
$\mathit {min}(U)$
for
 $\mathit {max}(U)$
.
$\mathit {max}(U)$
.
Corollary 2.14 [Reference Esakia21, Theorem 3.5.8].
Let
 $\mathfrak {X}$
be an
$\mathfrak {X}$
be an
 $\mathtt {S4(.t)}$
-space. If
$\mathtt {S4(.t)}$
-space. If
 $\mathfrak {X}$
is partially ordered, then
$\mathfrak {X}$
is partially ordered, then
 $\mathfrak {X}$
is a
$\mathfrak {X}$
is a
 $\mathtt {Grz(.t)}$
-space.
$\mathtt {Grz(.t)}$
-space.
We mention another simple fact concerning clusters, which we shall appeal to several times.
Proposition 2.15. Let
 $\mathfrak {X}, \mathfrak {Y}$
be
$\mathfrak {X}, \mathfrak {Y}$
be
 $\mathtt {S4(.t)}$
-spaces or Kripke frames and let
$\mathtt {S4(.t)}$
-spaces or Kripke frames and let
 $f:\mathfrak {X}\to \mathfrak {Y}$
be an order-preserving map. Then
$f:\mathfrak {X}\to \mathfrak {Y}$
be an order-preserving map. Then
 $f^{-1}(U)$
does not cut clusters for any
$f^{-1}(U)$
does not cut clusters for any
 $U\subseteq {Y}$
.
$U\subseteq {Y}$
.
Another class of
 $\mathtt {K4}$
-spaces we shall pay close attention to is the class of
$\mathtt {K4}$
-spaces we shall pay close attention to is the class of
 $\mathtt {GL}$
-spaces. These spaces display various similarities with
$\mathtt {GL}$
-spaces. These spaces display various similarities with
 $\mathtt {Grz}$
-spaces, as the reader can appreciate by comparing the following results with Proposition 2.11, Theorem 2.12, and Corollary 2.13.
$\mathtt {Grz}$
-spaces, as the reader can appreciate by comparing the following results with Proposition 2.11, Theorem 2.12, and Corollary 2.13.
Theorem 2.16. Let
 $\mathfrak {X}$
be
$\mathfrak {X}$
be
 $\mathtt {K4}$
-space. Then
$\mathtt {K4}$
-space. Then
 $\mathfrak {X}$
is a
$\mathfrak {X}$
is a
 $\mathtt {GL}$
-space if and only if for every
$\mathtt {GL}$
-space if and only if for every ![]() and any
and any
 $x\in X$
, if
$x\in X$
, if ![]() , then there is some
, then there is some
 $y\in U$
such that
$y\in U$
such that
 $Rxy$
and
$Rxy$
and ![]() .
.
Corollary 2.17. Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\mathtt {GL}$
-space and
$\mathtt {GL}$
-space and ![]() . The following conditions hold:
. The following conditions hold:
-
(1)
; -
(2)
; -
(3) if
$x\in U$
, then either
$x\in \mathit {max}(U)$
or there is
$y\in \mathit {max}(U)$
such that
$Rxy$
.




Corollary 2.18. Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\mathtt {K4}$
-space. If
$\mathtt {K4}$
-space. If
 $\mathfrak {X}$
has an irreflexive relation, then
$\mathfrak {X}$
has an irreflexive relation, then
 $\mathfrak {X}$
is a
$\mathfrak {X}$
is a
 $\mathtt {GL}$
-space.
$\mathtt {GL}$
-space.
3. Mappings and translations
The main results discussed in this article all involve translations between rules in different signatures, and semantic transformations corresponding to them. The purpose of this section is to introduce these translations and transformations.
Convention 3.1. To treat these mappings uniformly, we introduce some notational conventions to refer to the three pairs of signatures which we want to connect via translations. We let the numerals
 $1$
,
$1$
,
 $2,$
and
$2,$
and
 $3$
denote, respectively, the pairs of signatures
$3$
denote, respectively, the pairs of signatures
 $(\mathit {si}, \mathit {md})$
,
$(\mathit {si}, \mathit {md})$
,
 $(\mathit {bsi}, \mathit {ten}),$
and
$(\mathit {bsi}, \mathit {ten}),$
and
 $(\mathit {msi}, \mathit {md})$
. When s is any of these pairs of signatures, the signature occurring in the first coordinate of s is called the intuitionistic signature, whereas the signature occurring in the second coordinate of s is called the classical signature.
$(\mathit {msi}, \mathit {md})$
. When s is any of these pairs of signatures, the signature occurring in the first coordinate of s is called the intuitionistic signature, whereas the signature occurring in the second coordinate of s is called the classical signature.
For each pair of signatures
 $s\in \{1, 2, 3\},$
we will define a translation function
$s\in \{1, 2, 3\},$
we will define a translation function
 $T_s$
, as well as algebraic, topological, and syntactic versions of three mappings,
$T_s$
, as well as algebraic, topological, and syntactic versions of three mappings,
 $\sigma _{s}, \tau _{s,}$
and
$\sigma _{s}, \tau _{s,}$
and
 $\rho _{s}$
. In the case of signature pairs
$\rho _{s}$
. In the case of signature pairs
 $1$
and
$1$
and
 $2,$
we will also define versions of the maps
$2,$
we will also define versions of the maps
 $\sigma _{s}$
and
$\sigma _{s}$
and
 $\rho _{s}$
on Kripke frames. We will adopt the further convention of suppressing subscripts for signature pairs when they can be inferred from context.
$\rho _{s}$
on Kripke frames. We will adopt the further convention of suppressing subscripts for signature pairs when they can be inferred from context.
We define distinguished rule systems and universal classes of algebras for each pair of signatures
 $s\in \{1, 2, 3\}$
, as follows:
$s\in \{1, 2, 3\}$
, as follows:

 $$ \begin{align} \mathcal{I}_s:=\mathsf{Alg}(\mathtt{I}_s),\quad\mathcal{C}_s:=\mathsf{Alg}(\mathtt{C}_s),\quad \mathcal{C}^+_s:=\mathsf{Alg}(\mathtt{C}^+_s). \end{align} $$
$$ \begin{align} \mathcal{I}_s:=\mathsf{Alg}(\mathtt{I}_s),\quad\mathcal{C}_s:=\mathsf{Alg}(\mathtt{C}_s),\quad \mathcal{C}^+_s:=\mathsf{Alg}(\mathtt{C}^+_s). \end{align} $$
We shall use this notation to state definitions and results concerning the mappings mentioned above in a uniform fashion.
3.1. Mappings on algebras
We begin by reviewing some well-known semantic transformations between algebras. Recall that the free Boolean extension of a Heyting algebra
 $\mathfrak {H}$
is the unique Boolean algebra
$\mathfrak {H}$
is the unique Boolean algebra
 $B(\mathfrak {H})$
in which
$B(\mathfrak {H})$
in which
 $\mathfrak {H}$
embeds as a distributive lattice, such that the image of
$\mathfrak {H}$
embeds as a distributive lattice, such that the image of
 $\mathfrak {H}$
under this embedding generates
$\mathfrak {H}$
under this embedding generates
 $B(\mathfrak {H})$
as a Boolean algebra [Reference Esakia21, Definition 2.5.6, Constraint 2.5.7; Reference Balbes and Dwinger1, Section V]. For simplicity, we will generally identify
$B(\mathfrak {H})$
as a Boolean algebra [Reference Esakia21, Definition 2.5.6, Constraint 2.5.7; Reference Balbes and Dwinger1, Section V]. For simplicity, we will generally identify
 $\mathfrak {H}$
with its image in
$\mathfrak {H}$
with its image in
 $B(\mathfrak {H})$
. Note that this convention is used in the definitions to follow.
$B(\mathfrak {H})$
. Note that this convention is used in the definitions to follow.
If
 $\mathfrak {H}$
is a Heyting algebra, the algebra
$\mathfrak {H}$
is a Heyting algebra, the algebra
 $\sigma _{1}\mathfrak {H}$
is constructed by expanding
$\sigma _{1}\mathfrak {H}$
is constructed by expanding
 $B(\mathfrak {H})$
with the operation
$B(\mathfrak {H})$
with the operation
 $$\begin{align*}\square a:=\bigvee \{b\in H: b\leq a\}.\end{align*}$$
$$\begin{align*}\square a:=\bigvee \{b\in H: b\leq a\}.\end{align*}$$
If
 $\mathfrak {M}$
is a bi-Heyting algebra, we define
$\mathfrak {M}$
is a bi-Heyting algebra, we define
 $\sigma _{2}\mathfrak {H}$
the same way but also add the operation
$\sigma _{2}\mathfrak {H}$
the same way but also add the operation
 $$\begin{align*}\blacklozenge a:=\bigwedge \{b\in H: a\leq b\}.\end{align*}$$
$$\begin{align*}\blacklozenge a:=\bigwedge \{b\in H: a\leq b\}.\end{align*}$$
Finally, if
 $\mathfrak {M}$
is a frontal Heyting algebra, we define
$\mathfrak {M}$
is a frontal Heyting algebra, we define
 $\sigma _{3}\mathfrak {H}$
by expanding
$\sigma _{3}\mathfrak {H}$
by expanding
 $B(\mathfrak {H})$
with the operation
$B(\mathfrak {H})$
with the operation
 $$\begin{align*}\square a:=\boxtimes Ia, \end{align*}$$
$$\begin{align*}\square a:=\boxtimes Ia, \end{align*}$$
where
 $$\begin{align*}Ia:=\bigvee\{b\in H:b\leq a\}. \end{align*}$$
$$\begin{align*}Ia:=\bigvee\{b\in H:b\leq a\}. \end{align*}$$
It is known that
 $\sigma (\mathfrak {H})$
is a
$\sigma (\mathfrak {H})$
is a
 $\mathtt {Grz(.t)}$
-algebra whenever
$\mathtt {Grz(.t)}$
-algebra whenever
 $\mathfrak {H}$
is a (bi-)Heyting algebra [Reference Esakia21, Corollary 3.5.9; Reference Wolter43, Lemma 16], and moreover that
$\mathfrak {H}$
is a (bi-)Heyting algebra [Reference Esakia21, Corollary 3.5.9; Reference Wolter43, Lemma 16], and moreover that
 $\sigma _{3}(\mathfrak {H})$
is a
$\sigma _{3}(\mathfrak {H})$
is a
 $\mathtt {GL}$
-algebra whenever
$\mathtt {GL}$
-algebra whenever
 $\mathfrak {H}$
is a frontal Heyting algebra [Reference Esakia20, Corollary 20].
$\mathfrak {H}$
is a frontal Heyting algebra [Reference Esakia20, Corollary 20].
Conversely, if
 $\mathfrak {M}$
is an
$\mathfrak {M}$
is an
 $\mathtt {S4}$
-algebra, the algebra
$\mathtt {S4}$
-algebra, the algebra
 $\rho _{1} \mathfrak {M}$
is constructed as follows. As the carrier, we take the bounded lattice
$\rho _{1} \mathfrak {M}$
is constructed as follows. As the carrier, we take the bounded lattice
 $O(\mathfrak {M})$
of open elements of
$O(\mathfrak {M})$
of open elements of
 $\mathfrak {M}$
, that is, of those elements
$\mathfrak {M}$
, that is, of those elements
 $a\in M$
with
$a\in M$
with
 $\square a=a$
, or, equivalently,
$\square a=a$
, or, equivalently,
 $\blacklozenge a=a$
. We expand this lattice with the operation
$\blacklozenge a=a$
. We expand this lattice with the operation
 $$\begin{align*}a\to b:=\square (\neg a\lor b).\end{align*}$$
$$\begin{align*}a\to b:=\square (\neg a\lor b).\end{align*}$$
When
 $\mathfrak {M}$
is an
$\mathfrak {M}$
is an
 $\mathtt {S4.t}$
-algebra, we define
$\mathtt {S4.t}$
-algebra, we define
 $\rho _{2} \mathfrak {M}$
the same way but also add the operation
$\rho _{2} \mathfrak {M}$
the same way but also add the operation
 $$\begin{align*}a\leftarrow b:=\blacklozenge ( a\land \neg b).\end{align*}$$
$$\begin{align*}a\leftarrow b:=\blacklozenge ( a\land \neg b).\end{align*}$$
Likewise, if
 $\mathfrak {M}$
is a
$\mathfrak {M}$
is a
 $\mathtt {K4}$
-algebra, the algebra
$\mathtt {K4}$
-algebra, the algebra
 $\rho _{3}\mathfrak {M}$
is constructed as follows. As the carrier, we take the bounded lattice
$\rho _{3}\mathfrak {M}$
is constructed as follows. As the carrier, we take the bounded lattice
 $O^+(\mathfrak {M})$
of quasi-open elements of
$O^+(\mathfrak {M})$
of quasi-open elements of
 $\mathfrak {M}$
, i.e., those elements of
$\mathfrak {M}$
, i.e., those elements of
 $\mathfrak {M}$
with
$\mathfrak {M}$
with
 $\square ^+a=a$
, where
$\square ^+a=a$
, where
 $\square ^+a:=\square a\land a$
. We then expand this lattice with the following operations:
$\square ^+a:=\square a\land a$
. We then expand this lattice with the following operations:
 $$ \begin{align*} a\to b&:=\square^+ (\neg a\lor b),\\ \boxtimes a&:= \square a. \end{align*} $$
$$ \begin{align*} a\to b&:=\square^+ (\neg a\lor b),\\ \boxtimes a&:= \square a. \end{align*} $$
It is well known that
 $\rho \mathfrak {M}$
is a (bi-)Heyting algebra for every
$\rho \mathfrak {M}$
is a (bi-)Heyting algebra for every
 $\mathtt {S4(.t)}$
-algebra
$\mathtt {S4(.t)}$
-algebra
 $\mathfrak {M}$
, and that
$\mathfrak {M}$
, and that
 $\rho _{3}\mathfrak {M}$
is a frontal Heyting algebra for every
$\rho _{3}\mathfrak {M}$
is a frontal Heyting algebra for every
 $\mathtt {K4}$
-algebra
$\mathtt {K4}$
-algebra
 $\mathfrak {M}$
.
$\mathfrak {M}$
.
All these mappings can be lifted to universal classes. Given
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathcal {U, V}$
be universal classes of algebras on which, respectively,
$\mathcal {U, V}$
be universal classes of algebras on which, respectively,
 $\sigma _{s}$
and
$\sigma _{s}$
and
 $\rho _{s}$
are defined. We then put
$\rho _{s}$
are defined. We then put
 $$\begin{align*}\sigma_{s} \mathcal{U}:=\mathsf{Uni}\{\sigma_{s} \mathfrak{H}:\mathfrak{H}\in \mathcal{U}\},\qquad \rho_{s} \mathcal{V}:= \{\rho_{s}\mathfrak{A}:\mathfrak{A}\in \mathcal{V}\}.\end{align*}$$
$$\begin{align*}\sigma_{s} \mathcal{U}:=\mathsf{Uni}\{\sigma_{s} \mathfrak{H}:\mathfrak{H}\in \mathcal{U}\},\qquad \rho_{s} \mathcal{V}:= \{\rho_{s}\mathfrak{A}:\mathfrak{A}\in \mathcal{V}\}.\end{align*}$$
We also introduce mappings
 $\tau _{s}:\mathsf {Uni}(\mathcal {I}_s)\to \mathsf {Uni}(\mathcal {C}_s)$
by setting
$\tau _{s}:\mathsf {Uni}(\mathcal {I}_s)\to \mathsf {Uni}(\mathcal {C}_s)$
by setting
 $$\begin{align*}\tau_{s} \mathcal{W}:=\{\mathfrak{M}\in\mathcal{C} :\rho_{s}\mathfrak{M}\in \mathcal{W}\}. \end{align*}$$
$$\begin{align*}\tau_{s} \mathcal{W}:=\{\mathfrak{M}\in\mathcal{C} :\rho_{s}\mathfrak{M}\in \mathcal{W}\}. \end{align*}$$
3.2. Mappings on spaces
We now describe the maps defined in the previous subsection dually. If
 $\mathfrak {X}$
is an Esakia space, we set
$\mathfrak {X}$
is an Esakia space, we set
 $$\begin{align*}\sigma_1 \mathfrak{X}:=(X, R, \mathcal{O}),\qquad\qquad R:= {\leq}.\end{align*}$$
$$\begin{align*}\sigma_1 \mathfrak{X}:=(X, R, \mathcal{O}),\qquad\qquad R:= {\leq}.\end{align*}$$
When
 $\mathfrak {X}$
is a bi-Esakia space we let
$\mathfrak {X}$
is a bi-Esakia space we let
 $\sigma _{2}\mathfrak {X}:=\sigma _{1}\mathfrak {X}$
. Thus
$\sigma _{2}\mathfrak {X}:=\sigma _{1}\mathfrak {X}$
. Thus
 $\sigma _{1}$
and
$\sigma _{1}$
and
 $\sigma _{2}$
are just identity maps; we simply notate the relation differently to indicate that we are viewing the structure as a modal or tense space. Moreover, if
$\sigma _{2}$
are just identity maps; we simply notate the relation differently to indicate that we are viewing the structure as a modal or tense space. Moreover, if
 $\mathfrak {X}$
is a modalized Esakia space, we let
$\mathfrak {X}$
is a modalized Esakia space, we let
 $\sigma _{3}\mathfrak {X}$
be the
$\sigma _{3}\mathfrak {X}$
be the
 $\leq $
-free reduct of
$\leq $
-free reduct of
 $\mathfrak {X}$
. By Corollary 2.14, if
$\mathfrak {X}$
. By Corollary 2.14, if
 $\mathfrak {X}$
is a (bi-)Esakia space, then
$\mathfrak {X}$
is a (bi-)Esakia space, then
 $\sigma \mathfrak {X}$
is always a
$\sigma \mathfrak {X}$
is always a
 $\mathtt {Grz(.t)}$
-space. Likewise, by Corollary 2.18,
$\mathtt {Grz(.t)}$
-space. Likewise, by Corollary 2.18,
 $\sigma _{3}\mathfrak {X}$
is always a
$\sigma _{3}\mathfrak {X}$
is always a
 $\mathtt {GL}$
-space whenever
$\mathtt {GL}$
-space whenever
 $\mathfrak {X}$
is a modalized Esakia space.
$\mathfrak {X}$
is a modalized Esakia space.
Conversely, let
 $\mathfrak {Y}:=(Y, R, \mathcal {O})$
be a
$\mathfrak {Y}:=(Y, R, \mathcal {O})$
be a
 $\mathtt {K4}$
-space. For
$\mathtt {K4}$
-space. For
 $x, y\in Y,$
write
$x, y\in Y,$
write
 $x\sim y$
iff
$x\sim y$
iff
 $Rxy$
and
$Rxy$
and
 $Ryx$
. Define a map
$Ryx$
. Define a map
 $\varrho :Y\to \wp (Y)$
by setting
$\varrho :Y\to \wp (Y)$
by setting
 $\varrho (x)=\{y\in Y:x\sim y\}$
. We call this map the skeleton map. When
$\varrho (x)=\{y\in Y:x\sim y\}$
. We call this map the skeleton map. When
 $\mathfrak {Y}$
is an
$\mathfrak {Y}$
is an
 $\mathtt {S4}$
-space we let
$\mathtt {S4}$
-space we let
 $\rho _{1}\mathfrak {Y}:=(\varrho [Y], \leq , \mathcal {O}_{\varrho})$
where
$\rho _{1}\mathfrak {Y}:=(\varrho [Y], \leq , \mathcal {O}_{\varrho})$
where
 $\varrho (x)\leq \varrho (y)$
iff
$\varrho (x)\leq \varrho (y)$
iff
 $Rxy$
, and
$Rxy$
, and
 $U\in \mathcal {O}_\varrho$
iff
$U\in \mathcal {O}_\varrho$
iff
 $\varrho^{-1}(U)\in \mathcal {O}$
. We let
$\varrho^{-1}(U)\in \mathcal {O}$
. We let
 $\rho _{2}$
be the restriction of
$\rho _{2}$
be the restriction of
 $\rho _{1}$
to
$\rho _{1}$
to
 $\mathtt {S4.t}$
spaces. When
$\mathtt {S4.t}$
spaces. When
 $\mathfrak {Y}$
is a
$\mathfrak {Y}$
is a
 $\mathtt {K4}$
-space we let
$\mathtt {K4}$
-space we let
 $\rho _{3}\mathfrak {Y}:=(\varrho [Y], \leq , \sqsubseteq , \mathcal {O}_{\varrho})$
, where
$\rho _{3}\mathfrak {Y}:=(\varrho [Y], \leq , \sqsubseteq , \mathcal {O}_{\varrho})$
, where
 $\varrho (x)\leq \varrho (y)$
iff
$\varrho (x)\leq \varrho (y)$
iff
 $R^+xy$
and
$R^+xy$
and
 $\varrho (x)\sqsubseteq \varrho (y)$
iff
$\varrho (x)\sqsubseteq \varrho (y)$
iff
 $Rxy$
, and
$Rxy$
, and
 $\mathcal{O}_\varrho$
is defined as before. Here
$\mathcal{O}_\varrho$
is defined as before. Here
 $R^+$
denotes the reflexive closure of R.
$R^+$
denotes the reflexive closure of R.
In other words, when
 $\mathfrak {Y}$
is an
$\mathfrak {Y}$
is an
 $\mathtt {S4}$
-space, the space
$\mathtt {S4}$
-space, the space
 $\rho _{1}\mathfrak {Y}$
is obtained by collapsing the clusters of
$\rho _{1}\mathfrak {Y}$
is obtained by collapsing the clusters of
 $\mathfrak {Y}$
, lifting the relation R clusterwise and endowing the result with the quotient topology under the mapping
$\mathfrak {Y}$
, lifting the relation R clusterwise and endowing the result with the quotient topology under the mapping
 $\varrho $
. When
$\varrho $
. When
 $\mathfrak {Y}$
is a
$\mathfrak {Y}$
is a
 $\mathtt {K4}$
-space,
$\mathtt {K4}$
-space,
 $\rho _{3}\mathfrak {Y}$
is constructed in a similar way, except that the intuitionistic relation of
$\rho _{3}\mathfrak {Y}$
is constructed in a similar way, except that the intuitionistic relation of
 $\rho _{3}\mathfrak {Y}$
is obtained by lifting the reflexive closure of R clusterwise, and the modal relation is obtained by lifting R itself clusterwise.
$\rho _{3}\mathfrak {Y}$
is obtained by lifting the reflexive closure of R clusterwise, and the modal relation is obtained by lifting R itself clusterwise.
We note a simple property of the transformations
 $\rho _{s}$
, which we shall appeal to later on.
$\rho _{s}$
, which we shall appeal to later on.
Proposition 3.2. Let
 $\mathfrak {X}$
be a
$\mathfrak {X}$
be a
 $\mathtt {K4}$
-space. If
$\mathtt {K4}$
-space. If
 $U\subseteq X$
is open (resp., closed) and does not cut any cluster, then
$U\subseteq X$
is open (resp., closed) and does not cut any cluster, then
 $\varrho [U]$
is open (resp., closed) in
$\varrho [U]$
is open (resp., closed) in
 $\rho _{3}\mathfrak {X}$
. Moreover, the same holds when
$\rho _{3}\mathfrak {X}$
. Moreover, the same holds when
 $\mathfrak {X}$
is an
$\mathfrak {X}$
is an
 $\mathtt {S4}$
-space and
$\mathtt {S4}$
-space and
 $\rho _{3}$
is replaced with
$\rho _{3}$
is replaced with
 $\rho _{1}$
.
$\rho _{1}$
.
Routine arguments show that the transformations just defined are indeed dual to their algebraic counterparts defined in the previous subsection [see, e.g., Reference Esakia21, Proposition 3.4.15]. This is to say that given
 $s\in \{1, 2, 3\}$
, for any algebras
$s\in \{1, 2, 3\}$
, for any algebras
 $\mathfrak {H, M}$
on which the algebraic maps
$\mathfrak {H, M}$
on which the algebraic maps
 $\sigma _{s}, \rho _{s}$
are defined we have
$\sigma _{s}, \rho _{s}$
are defined we have
 $(\sigma _{s} \mathfrak {H})_*\cong \sigma _{s} \mathfrak {H}_*$
and
$(\sigma _{s} \mathfrak {H})_*\cong \sigma _{s} \mathfrak {H}_*$
and
 $(\rho _{s} \mathfrak {M})_*\cong \rho _{s} \mathfrak {M}_*$
. Consequently, for any spaces
$(\rho _{s} \mathfrak {M})_*\cong \rho _{s} \mathfrak {M}_*$
. Consequently, for any spaces
 $\mathfrak {X, Y}$
on which the geometric maps
$\mathfrak {X, Y}$
on which the geometric maps
 $\sigma _{s}, \rho _{s}$
are defined we have
$\sigma _{s}, \rho _{s}$
are defined we have
 $(\sigma _{s} \mathfrak {X})^*\cong \sigma _{s} \mathfrak {X}^*$
and
$(\sigma _{s} \mathfrak {X})^*\cong \sigma _{s} \mathfrak {X}^*$
and
 $(\rho _{s} \mathfrak {Y})^*\cong \rho _{s} \mathfrak {Y}^*$
.
$(\rho _{s} \mathfrak {Y})^*\cong \rho _{s} \mathfrak {Y}^*$
.
By appealing to these dualities, the following proposition easily follows.
Proposition 3.3. Given
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathfrak {H}\in \mathcal {I}_s$
and
$\mathfrak {H}\in \mathcal {I}_s$
and
 $\mathfrak {M}\in \mathcal {C}_s$
. Then
$\mathfrak {M}\in \mathcal {C}_s$
. Then
 $\mathfrak {H}\cong \rho _{s}\sigma _{s}\mathfrak {H}$
and
$\mathfrak {H}\cong \rho _{s}\sigma _{s}\mathfrak {H}$
and
 $\sigma _{s}\rho _{s}\mathfrak {M}$
is (isomorphic to) a subalgebra of
$\sigma _{s}\rho _{s}\mathfrak {M}$
is (isomorphic to) a subalgebra of
 $\mathfrak {M}$
.
$\mathfrak {M}$
.
3.3. Mappings on Kripke frames
For
 $s\in \{1, 2\}$
, we also define versions of the maps
$s\in \{1, 2\}$
, we also define versions of the maps
 $\sigma _{s}, \rho _{s}$
on Kripke frames. When
$\sigma _{s}, \rho _{s}$
on Kripke frames. When
 $\mathfrak {X}$
is an intuitionistic Kripke frame, we let
$\mathfrak {X}$
is an intuitionistic Kripke frame, we let
 $\sigma _{s} \mathfrak {X}=\mathfrak {X}$
. Conversely, if
$\sigma _{s} \mathfrak {X}=\mathfrak {X}$
. Conversely, if
 $\mathfrak {X}$
is a Kripke frame with a reflexive and transitive relation, we let
$\mathfrak {X}$
is a Kripke frame with a reflexive and transitive relation, we let
 $\rho _{s}\mathfrak {X}$
be defined as we did above for spaces, but omitting the conditions concerning topology. Since the maps are defined the same way for the two pairs of signatures
$\rho _{s}\mathfrak {X}$
be defined as we did above for spaces, but omitting the conditions concerning topology. Since the maps are defined the same way for the two pairs of signatures
 $1$
and
$1$
and
 $2$
, we will always omit signature subscripts when working with Kripke frames. We do not define counterparts of the maps
$2$
, we will always omit signature subscripts when working with Kripke frames. We do not define counterparts of the maps
 $\sigma _{3}, \rho _{3}$
on Kripke frames.
$\sigma _{3}, \rho _{3}$
on Kripke frames.
The
 $\rho $
transformation on Kripke frames corresponds quite closely with its topological version. In particular, for every Kripke frame
$\rho $
transformation on Kripke frames corresponds quite closely with its topological version. In particular, for every Kripke frame
 $\mathfrak {F}$
on which the mapping
$\mathfrak {F}$
on which the mapping
 $\rho $
is defined, we have
$\rho $
is defined, we have
 $\mathfrak {(\rho \mathfrak {F})}^+\cong \rho \mathfrak {F}^+$
, and so for every perfect
$\mathfrak {(\rho \mathfrak {F})}^+\cong \rho \mathfrak {F}^+$
, and so for every perfect
 $\mathtt {S4(.t)}$
-algebra
$\mathtt {S4(.t)}$
-algebra
 $\mathfrak {M,}$
we have
$\mathfrak {M,}$
we have
 $\mathfrak {(\rho \mathfrak {M})}_+\cong \rho \mathfrak {M}_+$
. On the other hand, the algebraic version of the map
$\mathfrak {(\rho \mathfrak {M})}_+\cong \rho \mathfrak {M}_+$
. On the other hand, the algebraic version of the map
 $\sigma $
fails to preserve atomicity [Reference Wolter44, p. 103], so in general, the identity
$\sigma $
fails to preserve atomicity [Reference Wolter44, p. 103], so in general, the identity
 $\sigma \mathfrak {(F)}^+\cong \sigma \mathfrak {F}^+$
may fail. Observe further that when
$\sigma \mathfrak {(F)}^+\cong \sigma \mathfrak {F}^+$
may fail. Observe further that when
 $\mathfrak {F}$
is an intuitionistic Kripke frame,
$\mathfrak {F}$
is an intuitionistic Kripke frame,
 $\sigma \mathfrak {F}$
is not guaranteed to be a Kripke frame for
$\sigma \mathfrak {F}$
is not guaranteed to be a Kripke frame for
 $\mathtt {Grz(.t)}$
. As is well known, the Kripke frames for
$\mathtt {Grz(.t)}$
. As is well known, the Kripke frames for
 $\mathtt {Grz(.t)}$
are precisely those partially ordered Kripke frames that are conversely well founded (resp., well-founded and conversely well founded). However, intuitionistic Kripke frames need not be well founded nor conversely well founded.
$\mathtt {Grz(.t)}$
are precisely those partially ordered Kripke frames that are conversely well founded (resp., well-founded and conversely well founded). However, intuitionistic Kripke frames need not be well founded nor conversely well founded.
3.4. Translations
All the mappings we have introduced are semantic counterparts to various translations between formulas in different signatures. These translations are all versions of the Gödel Translation [Reference Gödel23]. For present purposes, we shall define the Gödel translation as a mapping
 $T_{1}:\mathit {Frm}_{\mathit {si}}\to \mathit {Frm}_{\mathit {md}}$
defined recursively as follows:
$T_{1}:\mathit {Frm}_{\mathit {si}}\to \mathit {Frm}_{\mathit {md}}$
defined recursively as follows:
 $$ \begin{align*} T_{1}(\bot):=\bot, \qquad T_{1}(\varphi\lor \psi)&:=T_{1}(\varphi)\lor T_{1}(\psi),\\ T_{1}(\top):=\top, \qquad T_{1}(\varphi\to \psi)&:=\square (\neg T_{1}(\varphi)\lor T_{1}(\psi)),\\ T_{1}(p):=\square p, \qquad T_{1}(\varphi\land \psi)&:=T_{1}(\varphi)\land T_{1}(\psi). \end{align*} $$
$$ \begin{align*} T_{1}(\bot):=\bot, \qquad T_{1}(\varphi\lor \psi)&:=T_{1}(\varphi)\lor T_{1}(\psi),\\ T_{1}(\top):=\top, \qquad T_{1}(\varphi\to \psi)&:=\square (\neg T_{1}(\varphi)\lor T_{1}(\psi)),\\ T_{1}(p):=\square p, \qquad T_{1}(\varphi\land \psi)&:=T_{1}(\varphi)\land T_{1}(\psi). \end{align*} $$
We extend this translation to define two more mappings,
 $T_{2}:\mathit {Frm}_{\mathit {bsi}}\to \mathit {Frm}_{\mathit {ten}}$
and
$T_{2}:\mathit {Frm}_{\mathit {bsi}}\to \mathit {Frm}_{\mathit {ten}}$
and
 $T_{3}:\mathit {Frm}_{\mathit {msi}}\to \mathit {Frm}_{\mathit {md}}$
. These mappings are obtained by extending the definition above with one of the following additional conditions [cf. Reference Kuznetsov and Muravitsky31, Reference Wolter, Kracht, Rijke, Wansing and Zakharyaschev42]:
$T_{3}:\mathit {Frm}_{\mathit {msi}}\to \mathit {Frm}_{\mathit {md}}$
. These mappings are obtained by extending the definition above with one of the following additional conditions [cf. Reference Kuznetsov and Muravitsky31, Reference Wolter, Kracht, Rijke, Wansing and Zakharyaschev42]:
 $$\begin{align*}T_{2}(\varphi\leftarrow \psi):=\blacklozenge (T_{2}(\varphi)\land \neg T_{2}(\psi)),\qquad T_{3}(\boxtimes \varphi):=\square T_{3}(\varphi).\end{align*}$$
$$\begin{align*}T_{2}(\varphi\leftarrow \psi):=\blacklozenge (T_{2}(\varphi)\land \neg T_{2}(\psi)),\qquad T_{3}(\boxtimes \varphi):=\square T_{3}(\varphi).\end{align*}$$
 $T_{2}$
was introduced in [Reference Wolter, Kracht, Rijke, Wansing and Zakharyaschev42], whereas
$T_{2}$
was introduced in [Reference Wolter, Kracht, Rijke, Wansing and Zakharyaschev42], whereas
 $T_{3}$
is equivalent to the translation introduced in [Reference Kuznetsov and Muravitsky31] (see also [Reference Wolter and Zakharyaschev45, Reference Wolter and Zakharyaschev46]). We extend these mappings from formulae to rules by setting
$T_{3}$
is equivalent to the translation introduced in [Reference Kuznetsov and Muravitsky31] (see also [Reference Wolter and Zakharyaschev45, Reference Wolter and Zakharyaschev46]). We extend these mappings from formulae to rules by setting
 $$\begin{align*}T_{s}(\Gamma/\Delta):=T_{s}[\Gamma]/T_{s}[\Delta].\end{align*}$$
$$\begin{align*}T_{s}(\Gamma/\Delta):=T_{s}[\Gamma]/T_{s}[\Delta].\end{align*}$$
We will refer to all of these mappings as “Gödel Translations.”
The interactions between the Gödel translations and the semantic mappings previously introduced are described in the next lemma.
Lemma 3.4 [Cf. Reference Jeřábek27, Lemma 3.13].
Let
 $s\in \{1, 2, 3\}$
and let
$s\in \{1, 2, 3\}$
and let
 $\mathfrak {M}$
be an algebra on which
$\mathfrak {M}$
be an algebra on which
 $\rho _{s}$
is defined. Then for every rule in the intuitionistic signature of s, we have
$\rho _{s}$
is defined. Then for every rule in the intuitionistic signature of s, we have
 $$\begin{align*}\mathfrak{M}\models T_{s}(\Gamma/\Delta)\iff \rho_{s}\mathfrak{M}\models \Gamma/\Delta.\end{align*}$$
$$\begin{align*}\mathfrak{M}\models T_{s}(\Gamma/\Delta)\iff \rho_{s}\mathfrak{M}\models \Gamma/\Delta.\end{align*}$$
Let us now define mappings between logics in different signatures by means of the Gödel translations. For
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
. We define:
$\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
. We define:
 $$\begin{align*}\tau \mathtt{L}:=\mathtt{C}_s\oplus \{T_{s}(\Gamma/\Delta):\Gamma/\Delta\in \mathtt{L}\}, \qquad \sigma \mathtt{L}:=\mathtt{C}^+_s\oplus \tau_{s} \mathtt{L}.\end{align*}$$
$$\begin{align*}\tau \mathtt{L}:=\mathtt{C}_s\oplus \{T_{s}(\Gamma/\Delta):\Gamma/\Delta\in \mathtt{L}\}, \qquad \sigma \mathtt{L}:=\mathtt{C}^+_s\oplus \tau_{s} \mathtt{L}.\end{align*}$$
Conversely, if
 $\mathtt {M}\in \mathbf {NExt}(\mathtt {C}_s)$
, we put
$\mathtt {M}\in \mathbf {NExt}(\mathtt {C}_s)$
, we put
 $$\begin{align*}\rho_{s}\mathtt{M}:=\mathtt{I}_s\oplus \{\Gamma/\Delta: T(\Gamma/\Delta)\in \mathtt{M}\}.\end{align*}$$
$$\begin{align*}\rho_{s}\mathtt{M}:=\mathtt{I}_s\oplus \{\Gamma/\Delta: T(\Gamma/\Delta)\in \mathtt{M}\}.\end{align*}$$
Finally, let
 $\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
and
$\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
and
 $\mathtt {M}\in \mathbf {NExt}(\mathtt {M}_s)$
. We say that
$\mathtt {M}\in \mathbf {NExt}(\mathtt {M}_s)$
. We say that
 $\mathtt {M}$
is a companion of
$\mathtt {M}$
is a companion of
 $\mathtt {L}$
when
$\mathtt {L}$
when
 $\rho _{s}\mathtt {M}=\mathtt {L}$
. We call the companions of si and msi rule systems modal companions, and the companions of bsi rule systems tense companions.
$\rho _{s}\mathtt {M}=\mathtt {L}$
. We call the companions of si and msi rule systems modal companions, and the companions of bsi rule systems tense companions.
4. Stable canonical rules
In this section, we introduce stable canonical rules for si, bsi, modal, and tense rule systems. Essentially, stable canonical rules are syntactic devices for encoding finite filtrations. Although the results of this sections are only discussed in print for the si and modal case, their generalizations to the bsi and tense case are straightforward. We point the reader to [Reference Bezhanishvili and Bezhanishvili3–Reference Bezhanishvili, Bezhanishvili and Ilin6] and [Reference Ilin26, Chapter 5] for more in-depth discussion.
We are not going to define stable canonical rules for msi rule systems. This is because the main result we are interested in with respect to msi rule systems is the Kuznetsov–Muravitsky isomorphism, which can be proved using only modal stable canonical rules. We comment on how stable canonical rules for msi rule systems might be developed in Remark 4.3.
Since, in this section, we shall not deal with frontal Heyting algebras and their duals, unless otherwise specified, we use the term algebra to refer to something that is either a modal, tense, Heyting, or bi-Heyting algebras, without specifying which. We adopt analogous conventions for the terms space, rule, rule system, and so on.
We begin by defining stable canonical rules. Recall that when
 $\mathfrak {A}$
is an algebra, by
$\mathfrak {A}$
is an algebra, by
 $\mathit {op}(\mathfrak {A})$
we denote the set of non truth-functional operations of
$\mathit {op}(\mathfrak {A})$
we denote the set of non truth-functional operations of
 $\mathfrak {A}$
.
$\mathfrak {A}$
.
Definition 4.1. Let
 $\mathfrak {H}$
be a finite (bi-)Heyting algebra and let
$\mathfrak {H}$
be a finite (bi-)Heyting algebra and let
 $D:=(D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {H})}$
, where
$D:=(D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {H})}$
, where
 $D^\heartsuit \subseteq H\times H$
. For every
$D^\heartsuit \subseteq H\times H$
. For every
 $a\in H$
introduce a fresh propositional variable
$a\in H$
introduce a fresh propositional variable
 $p_a$
. The (si or bsi) stable canonical rule
$p_a$
. The (si or bsi) stable canonical rule
 $\eta (\mathfrak {H}, {D})$
is defined as the rule
$\eta (\mathfrak {H}, {D})$
is defined as the rule
 $\Gamma /\Delta $
, where
$\Gamma /\Delta $
, where
 $$ \begin{align*} \Gamma=\ &\{p_0\leftrightarrow \bot\}\cup\{p_1\leftrightarrow \top\}\cup\\ &\{p_{a\land b}\leftrightarrow p_a\land p_b:a, b\in H\}\cup \{p_{a\lor b}\leftrightarrow p_a\lor p_b:a, b\in H\}\cup\\ &\bigcup_{\heartsuit\in \mathit{op}(\mathfrak{H})} \{p_{a\heartsuit b}\leftrightarrow p_a\heartsuit p_b:(a, b)\in D^\heartsuit\},\\ \Delta=\ &\{p_a\leftrightarrow p_b:a, b\in H\text{ with } a\neq b\}. \end{align*} $$
$$ \begin{align*} \Gamma=\ &\{p_0\leftrightarrow \bot\}\cup\{p_1\leftrightarrow \top\}\cup\\ &\{p_{a\land b}\leftrightarrow p_a\land p_b:a, b\in H\}\cup \{p_{a\lor b}\leftrightarrow p_a\lor p_b:a, b\in H\}\cup\\ &\bigcup_{\heartsuit\in \mathit{op}(\mathfrak{H})} \{p_{a\heartsuit b}\leftrightarrow p_a\heartsuit p_b:(a, b)\in D^\heartsuit\},\\ \Delta=\ &\{p_a\leftrightarrow p_b:a, b\in H\text{ with } a\neq b\}. \end{align*} $$
Definition 4.2. Let
 $\mathfrak {M}$
be a finite modal (resp., tense) algebra and let
$\mathfrak {M}$
be a finite modal (resp., tense) algebra and let
 $ D:=(D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {M})}$
, where
$ D:=(D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {M})}$
, where
 $D^\heartsuit \subseteq M$
. For every
$D^\heartsuit \subseteq M$
. For every
 $a\in M$
introduce a fresh propositional variable
$a\in M$
introduce a fresh propositional variable
 $p_a$
. The modal (resp., tense) stable canonical rule
$p_a$
. The modal (resp., tense) stable canonical rule
 $\mu (\mathfrak {M}, {D})$
is defined as the rule
$\mu (\mathfrak {M}, {D})$
is defined as the rule
 $\Gamma /\Delta $
, where
$\Gamma /\Delta $
, where
 $$ \begin{align*} \Gamma=\ &\{p_0\leftrightarrow \bot\}\cup\{p_1\leftrightarrow \top\}\cup\\ &\{p_{a\land b}\leftrightarrow p_a\land p_b:a, b\in M\}\cup \{p_{\neg a}\leftrightarrow \neg p_a: a\in M\}\cup\\ &\{p_{\square a}\to \square p_a:a\in M\} \cup \left(\{\blacklozenge p_a\to p_{\blacklozenge a}:a\in M\}\cup \right) \\ &\bigcup_{\heartsuit\in \mathit{op}(\mathfrak{H})} \{p_{\heartsuit a}\leftrightarrow\heartsuit p_a:a\in D^\heartsuit\},\\ \Delta=\ &\{p_a:a\in A\smallsetminus 1\}. \end{align*} $$
$$ \begin{align*} \Gamma=\ &\{p_0\leftrightarrow \bot\}\cup\{p_1\leftrightarrow \top\}\cup\\ &\{p_{a\land b}\leftrightarrow p_a\land p_b:a, b\in M\}\cup \{p_{\neg a}\leftrightarrow \neg p_a: a\in M\}\cup\\ &\{p_{\square a}\to \square p_a:a\in M\} \cup \left(\{\blacklozenge p_a\to p_{\blacklozenge a}:a\in M\}\cup \right) \\ &\bigcup_{\heartsuit\in \mathit{op}(\mathfrak{H})} \{p_{\heartsuit a}\leftrightarrow\heartsuit p_a:a\in D^\heartsuit\},\\ \Delta=\ &\{p_a:a\in A\smallsetminus 1\}. \end{align*} $$
The parenthetical
 $\left (\{\blacklozenge p_a\to p_{\blacklozenge a}:a\in M\}\cup \right )$
, recall, indicates that the formulae
$\left (\{\blacklozenge p_a\to p_{\blacklozenge a}:a\in M\}\cup \right )$
, recall, indicates that the formulae
 $\blacklozenge p_a\to p_{\blacklozenge a}$
are to be added to
$\blacklozenge p_a\to p_{\blacklozenge a}$
are to be added to
 $\Gamma $
only when
$\Gamma $
only when
 $\mathfrak {M}$
is a tense algebra.Footnote
2
$\mathfrak {M}$
is a tense algebra.Footnote
2
We will use the notation
 ${\xi }(\mathfrak {A}, {D})$
to refer to a stable canonical rule without specifying whether it is modal, tense, si, or bsi.
${\xi }(\mathfrak {A}, {D})$
to refer to a stable canonical rule without specifying whether it is modal, tense, si, or bsi.
Remark 4.3. To keep the article relatively short, we decided not to include stable canonical rules for msi rule systems. We can indicate here two ways these might be developed. One straightforward approach is to simply combine modal and si stable canonical rules, requiring partial preservation of
 $\boxtimes $
. This approach is developed in [Reference Liao32]. Another approach, pursued in [Reference Cleani15], is to introduce rules which code up a more general notion of filtration. In the msi setting, this notion of filtration is motivated by the fact that any finite distributive lattice admits a unique expansion to a
$\boxtimes $
. This approach is developed in [Reference Liao32]. Another approach, pursued in [Reference Cleani15], is to introduce rules which code up a more general notion of filtration. In the msi setting, this notion of filtration is motivated by the fact that any finite distributive lattice admits a unique expansion to a
 $\mathtt {KM}$
-algebra. In the modal setting, it is obtained by lifting the requirement that
$\mathtt {KM}$
-algebra. In the modal setting, it is obtained by lifting the requirement that
 $\square $
be preserved in one direction from the definition of standard filtration. The main reason to work with this more general notion of filtration is that
$\square $
be preserved in one direction from the definition of standard filtration. The main reason to work with this more general notion of filtration is that
 $\mathtt {KM}$
and
$\mathtt {KM}$
and
 $\mathtt {GL}$
admit filtration in this more general sense, but not in the standard sense.
$\mathtt {GL}$
admit filtration in this more general sense, but not in the standard sense.
Either version of stable canonical rules for msi rule systems can be used to generalize our proof of the Dummett–Lemmon conjecture, to be presented in Section 6, to the pair of signatures
 $3$
. Liao [Reference Liao32] was able to use our technique to prove a Dummett–Lemmon conjecture for rule systems which are quite similar to what we call msi rule systems, but where the intuitionistic modality satisfies at least the axioms of
$3$
. Liao [Reference Liao32] was able to use our technique to prove a Dummett–Lemmon conjecture for rule systems which are quite similar to what we call msi rule systems, but where the intuitionistic modality satisfies at least the axioms of
 $\mathtt {S4}$
. It does not seem, however, that anything of substance rests on the assumption of the
$\mathtt {S4}$
. It does not seem, however, that anything of substance rests on the assumption of the
 $\mathtt {T}$
axiom.
$\mathtt {T}$
axiom.
If
 $\mathfrak {H}, \mathfrak {K}$
are (bi-)Heyting algebras, we call a map
$\mathfrak {H}, \mathfrak {K}$
are (bi-)Heyting algebras, we call a map
 $h:\mathfrak {H}\to \mathfrak {K}$
stable when h is a bounded lattice homomorphism. Given
$h:\mathfrak {H}\to \mathfrak {K}$
stable when h is a bounded lattice homomorphism. Given
 $\heartsuit \in \{\to , \leftarrow \}$
and
$\heartsuit \in \{\to , \leftarrow \}$
and
 $D^\heartsuit \subseteq H\times H$
, we say that h satisfies the
$D^\heartsuit \subseteq H\times H$
, we say that h satisfies the
 $\heartsuit $
-bounded domain condition
Footnote
3
(BDC
$\heartsuit $
-bounded domain condition
Footnote
3
(BDC
 $^\heartsuit $
) for
$^\heartsuit $
) for
 $D^\heartsuit $
if
$D^\heartsuit $
if
 $$\begin{align*}h(a\heartsuit b)=h(a)\heartsuit h(b)\end{align*}$$
$$\begin{align*}h(a\heartsuit b)=h(a)\heartsuit h(b)\end{align*}$$
for every
 $(a, b)\in D^\heartsuit $
. It is not difficult to check that every stable map
$(a, b)\in D^\heartsuit $
. It is not difficult to check that every stable map
 $h:\mathfrak {H}\to \mathfrak {K}$
satisfies
$h:\mathfrak {H}\to \mathfrak {K}$
satisfies
 $h(a\to b)\leq h(a)\to h(b)$
for every
$h(a\to b)\leq h(a)\to h(b)$
for every
 $(a, b)\in H$
. If
$(a, b)\in H$
. If
 $\mathfrak {H}\in \mathsf {biHA}$
, we also have
$\mathfrak {H}\in \mathsf {biHA}$
, we also have
 $h(a\leftarrow b)\geq h(a)\leftarrow h(b)$
for every
$h(a\leftarrow b)\geq h(a)\leftarrow h(b)$
for every
 $(a, b)\in H$
.
$(a, b)\in H$
.
Similarly, if
 $\mathfrak {M, N}$
are modal (resp., tense) algebras, we call a map
$\mathfrak {M, N}$
are modal (resp., tense) algebras, we call a map
 $h:\mathfrak {M}\to \mathfrak {N}$
stable when h is a Boolean algebra homomorphism which, moreover, satisfies
$h:\mathfrak {M}\to \mathfrak {N}$
stable when h is a Boolean algebra homomorphism which, moreover, satisfies
 $$ \begin{align*} h(\square a)\leq \square h(a) \qquad \left( \blacklozenge h(a)\leq h(\blacklozenge a) \right) \end{align*} $$
$$ \begin{align*} h(\square a)\leq \square h(a) \qquad \left( \blacklozenge h(a)\leq h(\blacklozenge a) \right) \end{align*} $$
for each
 $a\in A$
. Given
$a\in A$
. Given
 $\heartsuit \in \{\square , \blacklozenge \}$
and
$\heartsuit \in \{\square , \blacklozenge \}$
and
 $D^\heartsuit \subseteq A$
, we say that h satisfies the
$D^\heartsuit \subseteq A$
, we say that h satisfies the
 $\heartsuit $
-bounded domain condition (BDC
$\heartsuit $
-bounded domain condition (BDC
 $^\heartsuit $
) for
$^\heartsuit $
) for
 $D^\heartsuit $
if
$D^\heartsuit $
if
 $$\begin{align*}h(\heartsuit a)=\heartsuit h(a)\end{align*}$$
$$\begin{align*}h(\heartsuit a)=\heartsuit h(a)\end{align*}$$
for each
 $a\in D^\heartsuit $
. In both the si/bsi and the modal/tense case, we say that h satisfies the BDC for
$a\in D^\heartsuit $
. In both the si/bsi and the modal/tense case, we say that h satisfies the BDC for
 $ D$
if h satisfies the BDC
$ D$
if h satisfies the BDC
 $^\heartsuit $
for
$^\heartsuit $
for
 $D^\heartsuit $
for each
$D^\heartsuit $
for each
 $D^\heartsuit $
in D.
$D^\heartsuit $
in D.
The next result gives a uniform description of the refutation conditions of stable canonical rules on algebras in both the signatures under discussion.
Proposition 4.4 [Cf. Reference Bezhanishvili and Bezhanishvili3, Lemma 4.3], [Cf. Reference Bezhanishvili, Bezhanishvili and Iemhoff5, Theorem 5.4].
For every stable canonical rule
 ${\xi }(\mathfrak {A}, {D})$
and every algebra
${\xi }(\mathfrak {A}, {D})$
and every algebra
 $\mathfrak {B}$
having the same signature as
$\mathfrak {B}$
having the same signature as
 $\mathfrak {A}$
, we have that
$\mathfrak {A}$
, we have that
 $\mathfrak {B}\not \models {\xi }(\mathfrak {A}, {D})$
iff there is a stable embedding
$\mathfrak {B}\not \models {\xi }(\mathfrak {A}, {D})$
iff there is a stable embedding
 $h:\mathfrak {B}\to \mathfrak {A}$
satisfying the BDC for D.
$h:\mathfrak {B}\to \mathfrak {A}$
satisfying the BDC for D.
Proof sketch. We use the identity
 $V(p_a)=h(a)$
to define either the desired stable embedding satisfying the BDC or the desired valuation.
$V(p_a)=h(a)$
to define either the desired stable embedding satisfying the BDC or the desired valuation.
Stable canonical rules also have uniform refutation conditions on spaces and Kripke frames. If
 $\mathfrak {X, Y}$
are spaces, a map
$\mathfrak {X, Y}$
are spaces, a map
 $f:\mathfrak {X}\to \mathfrak {Y}$
is called stable when it is continuous and relation preserving, in the sense that
$f:\mathfrak {X}\to \mathfrak {Y}$
is called stable when it is continuous and relation preserving, in the sense that
 $x\leq y$
implies
$x\leq y$
implies
 $f(x)\leq f(y)$
for each
$f(x)\leq f(y)$
for each
 $x, y\in X$
. If
$x, y\in X$
. If
 $\mathfrak {X, Y}$
are Kripke frames rather than spaces, we call
$\mathfrak {X, Y}$
are Kripke frames rather than spaces, we call
 $f:\mathfrak {X}\to \mathfrak {Y}$
stable when it is relation preserving. In either case, given
$f:\mathfrak {X}\to \mathfrak {Y}$
stable when it is relation preserving. In either case, given
 $\mathfrak {d}\subseteq Y$
, we say that f satisfies the upward bounded domain condition (BDC
$\mathfrak {d}\subseteq Y$
, we say that f satisfies the upward bounded domain condition (BDC
 $\Uparrow $
) for
$\Uparrow $
) for
 $\mathfrak {d}$
when, for all
$\mathfrak {d}$
when, for all
 $x\in X$
, we have
$x\in X$
, we have
 $$\begin{align*}{{\Uparrow}}f(x)\cap \mathfrak{d}\neq\varnothing\Rightarrow f[{{\Uparrow}}x]\cap \mathfrak{d}\neq\varnothing.\end{align*}$$
$$\begin{align*}{{\Uparrow}}f(x)\cap \mathfrak{d}\neq\varnothing\Rightarrow f[{{\Uparrow}}x]\cap \mathfrak{d}\neq\varnothing.\end{align*}$$
This is to say: if there is
 $y\in \mathfrak {d}$
such that
$y\in \mathfrak {d}$
such that
 $f(x)\preceq y$
, then there must be some
$f(x)\preceq y$
, then there must be some
 $z\in X$
with
$z\in X$
with
 $x\preceq z$
and
$x\preceq z$
and
 $f(z)\in \mathfrak {d}$
. Analogously, we say that f satisfies the downward bounded domain condition (BDC
$f(z)\in \mathfrak {d}$
. Analogously, we say that f satisfies the downward bounded domain condition (BDC
 $\Downarrow $
) for
$\Downarrow $
) for
 $\mathfrak {d}$
when for all
$\mathfrak {d}$
when for all
 $x\in X$
, we have
$x\in X$
, we have
 $$\begin{align*}{{\Downarrow}}f(x)\cap \mathfrak{d}\neq\varnothing\Rightarrow f[{{\Downarrow}}x]\cap \mathfrak{d}\neq\varnothing.\end{align*}$$
$$\begin{align*}{{\Downarrow}}f(x)\cap \mathfrak{d}\neq\varnothing\Rightarrow f[{{\Downarrow}}x]\cap \mathfrak{d}\neq\varnothing.\end{align*}$$
Thus the BDC
 $\Uparrow $
and BDC
$\Uparrow $
and BDC
 $\Downarrow $
are generalizations of the defining order-theoretic conditions of a bounded morphism.
$\Downarrow $
are generalizations of the defining order-theoretic conditions of a bounded morphism.
Given
 $\mathfrak {D}^*\subseteq \wp (Y)$
for
$\mathfrak {D}^*\subseteq \wp (Y)$
for
 $*\in \{\Uparrow , \Downarrow \}$
, we say that f satisfies the BDC
$*\in \{\Uparrow , \Downarrow \}$
, we say that f satisfies the BDC
 $^*$
for
$^*$
for
 $\mathfrak {D}^*$
when it satisfies the BDC
$\mathfrak {D}^*$
when it satisfies the BDC
 $^*$
for each
$^*$
for each
 $\mathfrak {d}\in \mathfrak {D}^*$
. Given a tuple
$\mathfrak {d}\in \mathfrak {D}^*$
. Given a tuple
 $\mathfrak {D}$
with either one or two coordinates, we say that f satisfies the BDC for
$\mathfrak {D}$
with either one or two coordinates, we say that f satisfies the BDC for
 $\mathfrak {D}$
when f satisfies the BDC
$\mathfrak {D}$
when f satisfies the BDC
 $\Uparrow $
for the first coordinate of
$\Uparrow $
for the first coordinate of
 $\mathfrak {D}$
and the BDC
$\mathfrak {D}$
and the BDC
 $\Downarrow $
for the second coordinate of
$\Downarrow $
for the second coordinate of
 $\mathfrak {D}$
, if it exists. Thus the BDC
$\mathfrak {D}$
, if it exists. Thus the BDC
 $\Uparrow $
is associated with the connectives
$\Uparrow $
is associated with the connectives
 $\square $
and
$\square $
and
 $\to $
, whereas the BDC
$\to $
, whereas the BDC
 $\Downarrow $
is associated with the connectives
$\Downarrow $
is associated with the connectives
 $\blacklozenge $
and
$\blacklozenge $
and
 $\leftarrow $
.
$\leftarrow $
.
Let
 ${\xi }(\mathfrak {A}, {D})$
be a stable canonical rule. We define a mapping
${\xi }(\mathfrak {A}, {D})$
be a stable canonical rule. We define a mapping
 $D^\heartsuit \mapsto \mathfrak {D}^\heartsuit $
by putting
$D^\heartsuit \mapsto \mathfrak {D}^\heartsuit $
by putting
 $\mathfrak {D}^\heartsuit :=\{\mathfrak {d}^\heartsuit _{d}:d\in D\}$
, with
$\mathfrak {D}^\heartsuit :=\{\mathfrak {d}^\heartsuit _{d}:d\in D\}$
, with
 $$ \begin{align*} \mathfrak{d}^\heartsuit_{(a, b)}&:=\beta(a)\smallsetminus \beta(b) &\heartsuit\in \{\to, \leftarrow\},\\ \mathfrak{d}^\square_a&:= -\beta(a), &\\ \mathfrak{d}^\blacklozenge_a&:= \beta(a), & \end{align*} $$
$$ \begin{align*} \mathfrak{d}^\heartsuit_{(a, b)}&:=\beta(a)\smallsetminus \beta(b) &\heartsuit\in \{\to, \leftarrow\},\\ \mathfrak{d}^\square_a&:= -\beta(a), &\\ \mathfrak{d}^\blacklozenge_a&:= \beta(a), & \end{align*} $$
where
 $\beta $
is the Stone map. We then let
$\beta $
is the Stone map. We then let
 $\mathfrak {D}:=(\mathfrak {D}^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {A})}$
.
$\mathfrak {D}:=(\mathfrak {D}^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {A})}$
.
Proposition 4.5. For every stable canonical rule
 ${\xi }(\mathfrak {A}, {D})$
and for every space (resp., Kripke frame)
${\xi }(\mathfrak {A}, {D})$
and for every space (resp., Kripke frame)
 $\mathfrak {X}$
, we have
$\mathfrak {X}$
, we have
 $\mathfrak {X}\nvDash {\xi }(\mathfrak {A}, {D})$
iff there is a stable surjection
$\mathfrak {X}\nvDash {\xi }(\mathfrak {A}, {D})$
iff there is a stable surjection
 $f:\mathfrak {X}\to \mathfrak {A}_*$
satisfying the BDC for
$f:\mathfrak {X}\to \mathfrak {A}_*$
satisfying the BDC for
 $\mathfrak {D}$
.
$\mathfrak {D}$
.
Proof. The case for modal spaces is proved in [Reference Bezhanishvili, Bezhanishvili and Iemhoff5, Theorem 3.6]; essentially the same argument can be used for the remaining cases involving spaces. In each of these cases, one appeals to the appropriate duality result from Theorem 2.8. To establish the cases involving Kripke frames, one can adapt the same argument, but replacing appeals to duality results from Theorem 2.8 with appeals to duality results from Theorem 2.9.
Convention 4.6. In view of Proposition 4.5, we adopt the convention of writing a stable canonical rule
 ${\xi }(\mathfrak {A}, {D})$
as
${\xi }(\mathfrak {A}, {D})$
as
 ${\xi }(\mathfrak {A_*}, {\mathfrak {D}})$
when working with spaces.
${\xi }(\mathfrak {A_*}, {\mathfrak {D}})$
when working with spaces.
Stable maps and the BDC are closely related to the filtration construction. We recall its definition in an algebraic setting, and state the fundamental theorem used in most of its applications.
Definition 4.7. Let
 $\mathfrak {A}$
be an algebra, V a valuation on
$\mathfrak {A}$
be an algebra, V a valuation on
 $\mathfrak {A}$
, and
$\mathfrak {A}$
, and
 $\Theta $
a finite, subformula-closed set of formulae. A (finite) model
$\Theta $
a finite, subformula-closed set of formulae. A (finite) model
 $(\mathfrak {B}, V')$
is called a (finite) filtration of
$(\mathfrak {B}, V')$
is called a (finite) filtration of
 $(\mathfrak {A}, V)$
through
$(\mathfrak {A}, V)$
through
 $\Theta $
if the following conditions hold:
$\Theta $
if the following conditions hold:
-
(1) Heyting and bi-Heyting case:
-
(a) The bounded lattice reduct of
$\mathfrak {B}$
is isomorphic to the bounded sublattice of
$\mathfrak {A}$
generated by
$V[\Theta ]$
; -
(b)
$V(p)=V'(p)$
for every propositional variable
$p\in \Theta $
; -
(c) The inclusion
$\subseteq :\mathfrak {B}\to \mathfrak {A}$
is a stable embedding satisfying the BDC
$^\heartsuit $
for the set for each
$$\begin{align*}\{( V'(\varphi), V'(\psi)):\varphi\heartsuit \psi\in \Theta\},\end{align*}$$
$\heartsuit \in \mathit {op}(\mathfrak {A}).$
-
-
(2) Modal and tense case:
-
(a) The Boolean algebra reduct of
$\mathfrak {B}$
is isomorphic to the Boolean subalgebra of
$\mathfrak {A}$
generated by
$V[\Theta ]$
; -
(b)
$V(p)=V'(p)$
for every propositional variable
$p\in \Theta $
; -
(c) The inclusion
$\subseteq :\mathfrak {B}\to \mathfrak {A}$
is a stable embedding satisfying the BDC
$^\heartsuit $
for the set for each
$$\begin{align*}\{V(\varphi):\heartsuit \varphi\in \Theta\},\end{align*}$$
$\heartsuit \in \mathit {op}(\mathfrak {A}).$
-


















Theorem 4.8 (Filtration theorem).
Let
 $\mathfrak {A}$
be an algebra, V a valuation on
$\mathfrak {A}$
be an algebra, V a valuation on
 $\mathfrak {A}$
, and
$\mathfrak {A}$
, and
 $\Theta $
a finite, subformula closed set of formulae. If
$\Theta $
a finite, subformula closed set of formulae. If
 $(\mathfrak {B}, V')$
is a filtration of
$(\mathfrak {B}, V')$
is a filtration of
 $(\mathfrak {A}, V)$
through
$(\mathfrak {A}, V)$
through
 $\Theta $
, then for every
$\Theta $
, then for every
 $\varphi \in \Theta ,$
we have
$\varphi \in \Theta ,$
we have
 $$\begin{align*}V(\varphi)=V'(\varphi).\end{align*}$$
$$\begin{align*}V(\varphi)=V'(\varphi).\end{align*}$$
Consequently, for every rule
 $\Gamma /\Delta $
such that
$\Gamma /\Delta $
such that
 $\Gamma , \Delta \subseteq \Theta ,$
we have
$\Gamma , \Delta \subseteq \Theta ,$
we have
 $$\begin{align*}\mathfrak{A}, V\vDash \Gamma/\Delta\iff \mathfrak{B}, V'\vDash \Gamma/\Delta.\end{align*}$$
$$\begin{align*}\mathfrak{A}, V\vDash \Gamma/\Delta\iff \mathfrak{B}, V'\vDash \Gamma/\Delta.\end{align*}$$
The next result establishes that every rule is equivalent to finitely many stable canonical rules. The restriction of this lemma to si and modal rules was proved in [Reference Bezhanishvili, Bezhanishvili and Ilin6, Proposition 3.3], [Reference Bezhanishvili, Bezhanishvili and Iemhoff5, Theorem 5.5].
Lemma 4.9 [Cf. Reference Bezhanishvili, Bezhanishvili and Ilin6, Proposition 3.3], [Cf. Reference Bezhanishvili, Bezhanishvili and Iemhoff5, Theorem 5.5].
The following conditions hold:
-
(1) For every (b)si rule
$\Gamma /\Delta ,$
there is a finite set
$\Xi $
of (b)si stable canonical rules such that for any (bi-)Heyting algebra
$\mathfrak {K}$
we have
$\mathfrak {K}\nvDash \Gamma /\Delta $
iff there is
${\eta }(\mathfrak {H}, {D})\in \Xi $
such that
$\mathfrak {K}\nvDash {\eta }(\mathfrak {H}, {D})$
. -
(2) For every modal rule
$\Gamma /\Delta ,$
there is a finite set
$\Xi $
of modal stable canonical rules of the form
$\mu (\mathfrak {M}, {D})$
with
$\mathfrak {M}$
a
$\mathtt {K4}$
-algebra, such that for any
$\mathtt {K4}$
algebra
$\mathfrak {N,}$
we have that
$\mathfrak {N}\nvDash \Gamma /\Delta $
iff there is
$\mu (\mathfrak {M}, {D})\in \Xi $
such that
$\mathfrak {N}\nvDash \mu (\mathfrak {M}, {D})$
. -
(3) For every modal (resp., tense) rule
$\Gamma /\Delta ,$
there is a finite set
$\Xi $
of modal (resp., tense) stable canonical rules of the form
$\mu (\mathfrak {M}, {D})$
with
$\mathfrak {M}$
an
$\mathtt {S4(.t)}$
-algebra, such that for any
$\mathtt {S4(.t)}$
algebra
$\mathfrak {N,}$
we have that
$\mathfrak {N}\nvDash \Gamma /\Delta $
iff there is
$\mu (\mathfrak {M}, {D})\in \Xi $
such that
$\mathfrak {N}\nvDash \mu (\mathfrak {M}, {D})$
.


























Proof. We spell out the proofs of the si and bsi cases to illustrate the exact role of filtration in the machinery of stable canonical rules. When
 $\Gamma /\Delta $
is a rule, write
$\Gamma /\Delta $
is a rule, write
 $\mathit {Sfor}(\Gamma /\Delta )$
for the set of all formulas that are subformulas of some
$\mathit {Sfor}(\Gamma /\Delta )$
for the set of all formulas that are subformulas of some
 $\gamma \in \Gamma $
or some
$\gamma \in \Gamma $
or some
 $\delta \in \Delta $
. Since bounded distributive lattices are locally finite, there are, up to isomorphism, only finitely many pairs
$\delta \in \Delta $
. Since bounded distributive lattices are locally finite, there are, up to isomorphism, only finitely many pairs
 $(\mathfrak {H}, D)$
such that:
$(\mathfrak {H}, D)$
such that:
-
•
$\mathfrak {H}$
is a (bi-)Heyting algebra which is at most k-generated as a bounded distributive lattice, where
$k=|\mathit {Sfor}(\Gamma /\Delta )|$
; -
•
$ D=(D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {H})}$
with
$D^\heartsuit =\{(V(\varphi ), V(\psi )):\varphi \heartsuit \psi \in \mathit {Sfor}(\Gamma /\Delta )\}$
, where V is a valuation on
$\mathfrak {H}$
refuting
$\Gamma /\Delta $
.






Let
 $\Xi $
be the finite set of all rules
$\Xi $
be the finite set of all rules
 $\eta (\mathfrak {H}, {D})$
for all such pairs
$\eta (\mathfrak {H}, {D})$
for all such pairs
 $(\mathfrak {H}, D)$
, identified up to isomorphism.
$(\mathfrak {H}, D)$
, identified up to isomorphism.
 $(\Rightarrow )$
Assume
$(\Rightarrow )$
Assume
 $\mathfrak {K}\nvDash \Gamma /\Delta $
and take a valuation V on
$\mathfrak {K}\nvDash \Gamma /\Delta $
and take a valuation V on
 $\mathfrak {K}$
refuting
$\mathfrak {K}$
refuting
 $\Gamma /\Delta $
. Consider the bounded distributive sublattice
$\Gamma /\Delta $
. Consider the bounded distributive sublattice
 $\mathfrak {J}$
of
$\mathfrak {J}$
of
 $\mathfrak {K}$
generated by
$\mathfrak {K}$
generated by
 $V[\mathit {Sfor}(\Gamma /\Delta )]$
. Since bounded distributive lattices are locally finite,
$V[\mathit {Sfor}(\Gamma /\Delta )]$
. Since bounded distributive lattices are locally finite,
 $\mathfrak {J}$
is finite. Moreover
$\mathfrak {J}$
is finite. Moreover
 $\mathfrak {J}$
may be viewed as a Heyting or bi-Heyting algebra by defining one or both of the following operations on
$\mathfrak {J}$
may be viewed as a Heyting or bi-Heyting algebra by defining one or both of the following operations on
 $\mathfrak {J}$
:
$\mathfrak {J}$
:

Define a valuation
 $V'$
on
$V'$
on
 $\mathfrak {J}$
with
$\mathfrak {J}$
with
 $V'(p)=V(p)$
if
$V'(p)=V(p)$
if
 $p\in \mathit {Sfor}(\Gamma /\Delta )$
,
$p\in \mathit {Sfor}(\Gamma /\Delta )$
,
 $V'(p)$
arbitrary otherwise. Since
$V'(p)$
arbitrary otherwise. Since
 $\mathfrak {J}$
is a sublattice of
$\mathfrak {J}$
is a sublattice of
 $\mathfrak {K}$
, the inclusion
$\mathfrak {K}$
, the inclusion
 $\subseteq $
is a stable embedding.
$\subseteq $
is a stable embedding.
-
• Let
$\varphi \to \psi \in \mathit {Sfor}(\Gamma /\Delta )$
. Then
$V'(\varphi )\to V'(\psi )\in J$
. Since
$\subseteq $
is a stable embedding, we have
$V'(\varphi )\rightsquigarrow V'(\psi )\leq V'(\varphi )\to V'(\psi )$
. Conversely, by the definition of
$\rightsquigarrow ,$
we find
$V'(\varphi )\rightsquigarrow V'(\psi )\land V'(\varphi )\leq V'(\psi )$
. By the properties of Heyting algebras, it follows that
$V'(\varphi )\rightsquigarrow V'(\psi )\leq V'(\varphi )\to V'(\psi )$
. Thus,
$V'(\varphi )\rightsquigarrow V'(\psi )= V'(\varphi )\to V'(\psi )$
-
• By analogous reasoning, whenever
$\varphi \leftarrow \psi \in \mathit {Sfor}(\Gamma /\Delta ),$
we have that .









We have thus shown that the model
 $(\mathfrak {J}, V')$
is a filtration of the model
$(\mathfrak {J}, V')$
is a filtration of the model
 $(\mathfrak {K}, V)$
through
$(\mathfrak {K}, V)$
through
 $\mathit {Sfor}(\Gamma /\Delta )$
, which implies
$\mathit {Sfor}(\Gamma /\Delta )$
, which implies
 $\mathfrak {J}, V'\nvDash \Gamma /\Delta $
.
$\mathfrak {J}, V'\nvDash \Gamma /\Delta $
.
 $(\Leftarrow )$
Assume that there is
$(\Leftarrow )$
Assume that there is
 $\eta (\mathfrak {H}, {D})\in \Xi $
such that
$\eta (\mathfrak {H}, {D})\in \Xi $
such that
 $\mathfrak {K}\nvDash \eta (\mathfrak {H}, {D})$
. Let V be the valuation associated with
$\mathfrak {K}\nvDash \eta (\mathfrak {H}, {D})$
. Let V be the valuation associated with
 $ D$
in the sense spelled out above. Then
$ D$
in the sense spelled out above. Then
 $\mathfrak {H}, V\nvDash \Gamma /\Delta $
. Moreover,
$\mathfrak {H}, V\nvDash \Gamma /\Delta $
. Moreover,
 $(\mathfrak {H}, V)$
is a filtration of the model
$(\mathfrak {H}, V)$
is a filtration of the model
 $(\mathfrak {K}, V)$
, so by the filtration theorem, it follows that
$(\mathfrak {K}, V)$
, so by the filtration theorem, it follows that
 $\mathfrak {K}, V\nvDash \Gamma /\Delta $
.
$\mathfrak {K}, V\nvDash \Gamma /\Delta $
.
The proofs of the modal and tense cases of Lemma 4.9 are analogous, appealing to the local finiteness of Boolean algebras instead of the local finiteness of bounded distributive lattices. While filtrations of models based on modal or tense algebras are not unique, they can always be constructed. Furthermore, a model based on a
 $\mathtt {K4}$
-algebra always has a filtration which is itself based on a
$\mathtt {K4}$
-algebra always has a filtration which is itself based on a
 $\mathtt {K4}$
-algebra, and a model based on an
$\mathtt {K4}$
-algebra, and a model based on an
 $\mathtt {S4(.t)}$
-algebra always has a filtration which is itself based on an
$\mathtt {S4(.t)}$
-algebra always has a filtration which is itself based on an
 $\mathtt {S4(.t)}$
-algebra. These observations allow one to prove the second and third parts of Lemma 4.9 by essentially the same argument.
$\mathtt {S4(.t)}$
-algebra. These observations allow one to prove the second and third parts of Lemma 4.9 by essentially the same argument.
As a consequence of Lemma 4.9, we obtain uniform axiomatizations of si, bsi, modal, and tense rule systems in terms of stable canonical rules.
Theorem 4.10 [Cf. Reference Bezhanishvili, Bezhanishvili and Ilin6, Proposition 3.4].
The following conditions hold:
-
(1) Any si, bsi, modal, and tense rule system is axiomatizable, over the least rule system of the same kind, by some set of stable canonical rules;
-
(2) Every modal rule system above
$\mathtt {K4}$
is axiomatizable, over
$\mathtt {K4}$
, by a set of stable canonical rules based on
$\mathtt {K4}$
-algebras; -
(3) Every modal (resp., tense) rule system above
$\mathtt {S4(.t)}$
is axiomatizable, over
$\mathtt {S4(.t)}$
, by a set of stable canonical rules based on
$\mathtt {S4(.t)}$
-algebras.






We close this section with a brief comparison of our stable canonical rules with Jeřábek-style canonical rules. Our bsi and tense stable canonical rules generalize si and modal stable canonical rules in a way that mirrors the intimate connection existing between Heyting and bi-Heyting algebras on the one hand, and modal and tense algebras on the other. Just like a bi-Heyting algebra is nothing but a Heyting algebra whose order-dual is also a Heyting algebra, every bsi stable canonical rule is a sort of “independent fusion” between two si stable canonical rules, whose associated Heyting algebras are order-dual to one another. Similarly for the tense case.
Jeřábek-style si and modal canonical rules (like Zakharyaschev-style si and modal canonical formulae), by contrast, do not generalize as smoothly to the bsi and tense case. Algebraically, a Jeřábek-style si canonical rule may be defined as follows (Cf. [Reference Bezhanishvili and Bezhanishvili2, Reference Bezhanishvili, Bezhanishvili and Ilin6]).
Definition 4.11. Let
 $\mathfrak {H}\in \mathsf {HA}$
be finite and let
$\mathfrak {H}\in \mathsf {HA}$
be finite and let
 $D\subseteq H$
. The si canonical rule of
$D\subseteq H$
. The si canonical rule of
 $(\mathfrak {H}, D)$
is the rule
$(\mathfrak {H}, D)$
is the rule
 $\zeta (\mathfrak {H}, D)=\Gamma /\Delta $
, where
$\zeta (\mathfrak {H}, D)=\Gamma /\Delta $
, where
 $$ \begin{align*} \Gamma:=\ &\{p_0\leftrightarrow \bot\}\cup\\ &\{p_{a\land b}\leftrightarrow p_a\land p_b:a, b\in H\}\cup\{p_{a\to b}\leftrightarrow p_a\to p_b:a, b\in H\}\cup\\ &\{p_{a\lor b}\leftrightarrow p_a\lor p_b:(a, b)\in D\},\\ \Delta:=\ &\{p_a\leftrightarrow p_b:a, b\in H\text{ with }a\neq b\}. \end{align*} $$
$$ \begin{align*} \Gamma:=\ &\{p_0\leftrightarrow \bot\}\cup\\ &\{p_{a\land b}\leftrightarrow p_a\land p_b:a, b\in H\}\cup\{p_{a\to b}\leftrightarrow p_a\to p_b:a, b\in H\}\cup\\ &\{p_{a\lor b}\leftrightarrow p_a\lor p_b:(a, b)\in D\},\\ \Delta:=\ &\{p_a\leftrightarrow p_b:a, b\in H\text{ with }a\neq b\}. \end{align*} $$
Generalizing the proof of [Reference Bezhanishvili, Bezhanishvili and Ilin6, Corollary 5.10], one can show that every si rule is equivalent to finitely many si canonical rules. The key ingredient in this proof is a characterization of the refutation conditions for si canonical rules:
 $\zeta (\mathfrak {H}, D)$
is refuted by a Heyting algebra
$\zeta (\mathfrak {H}, D)$
is refuted by a Heyting algebra
 $\mathfrak {K}$
iff there is a
$\mathfrak {K}$
iff there is a
 $(\land , \to , 0)$
-embedding
$(\land , \to , 0)$
-embedding
 $h:\mathfrak {H}\to \mathfrak {K}$
preserving
$h:\mathfrak {H}\to \mathfrak {K}$
preserving
 $\lor $
on elements from D. Because
$\lor $
on elements from D. Because
 $(\land , \to , 0)$
-algebras are locally finite, a result known as Diego’s theorem, one can then reason as in the proof of Lemma 4.9 to reach the desired result.
$(\land , \to , 0)$
-algebras are locally finite, a result known as Diego’s theorem, one can then reason as in the proof of Lemma 4.9 to reach the desired result.
It should be clear that if one defined the bsi canonical rule
 $\zeta _B(\mathfrak {H}, D, D')$
by combining the rules
$\zeta _B(\mathfrak {H}, D, D')$
by combining the rules
 $\zeta (\mathfrak {H}, D)$
and
$\zeta (\mathfrak {H}, D)$
and
 $\zeta ({\mathfrak {H}}, D')$
the same way bsi stable canonical rule combine si stable canonical rules, then
$\zeta ({\mathfrak {H}}, D')$
the same way bsi stable canonical rule combine si stable canonical rules, then
 $\zeta _B(\mathfrak {H}, D, D')$
would be refuted by a bi-Heyting algebra
$\zeta _B(\mathfrak {H}, D, D')$
would be refuted by a bi-Heyting algebra
 $\mathfrak {K}$
iff there is a bi-Heyting algebra embedding
$\mathfrak {K}$
iff there is a bi-Heyting algebra embedding
 $h:\mathfrak {H}\to \mathfrak {K}$
. Since the variety of bi-Heyting algebras is not locally finite, this refutation condition is clearly too strong to deliver a result to the effect that every bsi rule is equivalent to a set of bsi canonical rules. Without such a result, in turn, there is little hope of axiomatizing every rule system over
$h:\mathfrak {H}\to \mathfrak {K}$
. Since the variety of bi-Heyting algebras is not locally finite, this refutation condition is clearly too strong to deliver a result to the effect that every bsi rule is equivalent to a set of bsi canonical rules. Without such a result, in turn, there is little hope of axiomatizing every rule system over
 $\mathtt {biIPC}$
by means of bsi canonical rules.
$\mathtt {biIPC}$
by means of bsi canonical rules.
Similar remarks hold in the tense case. Bezhanishvili et al. [Reference Bezhanishvili, Ghilardi and Jibladze8] show that the proof of the fact that every modal formula is equivalent, over
 $\mathtt {S4}$
, to finitely many modal Zakharyaschev-style canonical formulae of
$\mathtt {S4}$
, to finitely many modal Zakharyaschev-style canonical formulae of
 $\mathtt {S4}$
-algebras rests on an application of Diego’s theorem [cf. Reference Bezhanishvili, Ghilardi and Jibladze8, Main Lemma]. This has to do with how selective filtrations of
$\mathtt {S4}$
-algebras rests on an application of Diego’s theorem [cf. Reference Bezhanishvili, Ghilardi and Jibladze8, Main Lemma]. This has to do with how selective filtrations of
 $\mathtt {S4}$
-algebras are constructed. Given an
$\mathtt {S4}$
-algebras are constructed. Given an
 $\mathtt {S4}$
-algebra
$\mathtt {S4}$
-algebra
 $\mathfrak {B}$
refuting a rule
$\mathfrak {B}$
refuting a rule
 $\Gamma /\Delta $
, a key step in constructing a finite selective filtration of
$\Gamma /\Delta $
, a key step in constructing a finite selective filtration of
 $\mathfrak {B}$
through
$\mathfrak {B}$
through
 $\mathit {Sfor}(\Gamma /\Delta )$
consists in generating a
$\mathit {Sfor}(\Gamma /\Delta )$
consists in generating a
 $(\land , \to , 0)$
-subalgebra of
$(\land , \to , 0)$
-subalgebra of
 $\rho \mathfrak {A}$
from a finite subset of
$\rho \mathfrak {A}$
from a finite subset of
 $O(A)$
. This structure is guaranteed to be finite by Diego’s theorem. The most obvious way of generalizing this construction to tense algebras would require replacing this step with one of the following:
$O(A)$
. This structure is guaranteed to be finite by Diego’s theorem. The most obvious way of generalizing this construction to tense algebras would require replacing this step with one of the following:
-
(1) Generate both a
$(\land , \to , 0)$
-subalgebra of
$\rho \mathfrak {A}$
and a
$(\lor , \leftarrow , 1)$
-subalgebra of
$\rho \mathfrak {A}$
from a finite subset of
$O(A)$
; -
(2) Generate a bi-Heyting subalgebra of
$\rho \mathfrak {A}$
from a finite subset of
$O(A)$
.







On option 1, Diego’s theorem and its order dual would guarantee that both the
 $(\land , \to , 0)$
-subalgebra of
$(\land , \to , 0)$
-subalgebra of
 $\rho \mathfrak {A}$
and the
$\rho \mathfrak {A}$
and the
 $(\lor , \leftarrow , 1)$
-subalgebra of
$(\lor , \leftarrow , 1)$
-subalgebra of
 $\rho \mathfrak {A}$
are finite. However, it is not clear how one could then combine the two subalgebras into a bi-Heyting algebra, which is required to obtain a selective filtration based on a tense algebra. On option 2, on the other hand, we would indeed obtain a bi-Heyting subalgebra of
$\rho \mathfrak {A}$
are finite. However, it is not clear how one could then combine the two subalgebras into a bi-Heyting algebra, which is required to obtain a selective filtration based on a tense algebra. On option 2, on the other hand, we would indeed obtain a bi-Heyting subalgebra of
 $\rho \mathfrak {A}$
, but not necessarily a finite one, since bi-Heyting algebras are not locally finite.
$\rho \mathfrak {A}$
, but not necessarily a finite one, since bi-Heyting algebras are not locally finite.
We realize that the argument sketches just presented are far from conclusive, so we do not rule out the possibility that Jeřábek-style bsi and tense canonical rules could somehow be developed in such a way as to be a suitable tools for developing the theory of tense companions of bsi-rule systems. What such rules would look like, and in what sense they would constitute genuine generalizations of Jeřábek’s canonical rules and Zakharyaschev’s canonical formulae are interesting questions, but we cannot hope to adequately answer them here. The point we wish to stress is that answering this sort of questions is a non-trivial matter, whereas generalizing stable canonical rules to the bsi and tense setting is a completely routine task. In our approach exactly the same methods used in the si and modal case work equally well in the bsi and tense case.
5. Blok–Esakia theorems and the Kuznetsov–Muravitsky isomorphism
We now set out to develop the theory of modal and tense companions of si and bsi rule systems using the machinery of stable canonical rules just presented. For each of the three pairs of signatures
 $1, 2,$
and
$1, 2,$
and
 $3$
under discussion, we prove that the companions of a rule system form an interval, and establish a Blok–Esakia like result. The original Blok–Esakia theorem and the Kuznetsov–Muravitsky isomorphism follow as corollaries.
$3$
under discussion, we prove that the companions of a rule system form an interval, and establish a Blok–Esakia like result. The original Blok–Esakia theorem and the Kuznetsov–Muravitsky isomorphism follow as corollaries.
5.1. Novel proofs
The main problem one needs to deal with in order to prove the results just announced is showing that each syntactic mapping
 $\sigma _{s}$
is surjective on the codomain
$\sigma _{s}$
is surjective on the codomain
 $\mathcal {C}^+_s$
(recall we are using the notation introduced in Convention 3.1.) The novelty of our approach lies in the use of stable canonical rules to establish that result.
$\mathcal {C}^+_s$
(recall we are using the notation introduced in Convention 3.1.) The novelty of our approach lies in the use of stable canonical rules to establish that result.
Our strategy is centered on the following lemma.
Lemma 5.1 (Main Lemma).
Given
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathfrak {M}\in \mathcal {C}^+_s$
. Then for every rule
$\mathfrak {M}\in \mathcal {C}^+_s$
. Then for every rule
 $\Gamma /\Delta $
in the classical signature of
$\Gamma /\Delta $
in the classical signature of
 $s,$
we have that
$s,$
we have that
 $\mathfrak {M}\models \Gamma /\Delta $
iff
$\mathfrak {M}\models \Gamma /\Delta $
iff
 $\sigma _{s}\rho _{s}\mathfrak {M}\models \Gamma /\Delta $
.
$\sigma _{s}\rho _{s}\mathfrak {M}\models \Gamma /\Delta $
.
In each of the three cases, the
 $(\Rightarrow )$
direction is immediate from Proposition 3.3. We give full proofs of the other direction in the cases
$(\Rightarrow )$
direction is immediate from Proposition 3.3. We give full proofs of the other direction in the cases
 $s=2$
and
$s=2$
and
 $s=3$
. A proof of the case
$s=3$
. A proof of the case
 $s=1$
can be derived from the proof of the case
$s=1$
can be derived from the proof of the case
 $s=2$
by making minimal adaptations, which we shall sketch.
$s=2$
by making minimal adaptations, which we shall sketch.
Proof of Case s = 2.
We prove the dual statement that
 $\mathfrak {M}_*\nvDash \Gamma /\Delta $
implies
$\mathfrak {M}_*\nvDash \Gamma /\Delta $
implies
 $\sigma \rho \mathfrak {M}_*\nvDash \Gamma /\Delta $
. Let
$\sigma \rho \mathfrak {M}_*\nvDash \Gamma /\Delta $
. Let
 $\mathfrak {X}:=\mathfrak {M}_*$
. In view of Theorem 4.10, it is enough to consider the case
$\mathfrak {X}:=\mathfrak {M}_*$
. In view of Theorem 4.10, it is enough to consider the case
 $\Gamma /\Delta =\mu (\mathfrak {F}, {\mathfrak {D}})$
, for
$\Gamma /\Delta =\mu (\mathfrak {F}, {\mathfrak {D}})$
, for
 $\mathfrak {F}$
the dual of a finite
$\mathfrak {F}$
the dual of a finite
 $\mathtt {S4(.t)}$
-algebra. So suppose
$\mathtt {S4(.t)}$
-algebra. So suppose
 $\mathfrak {X}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
. By Proposition 4.5, there is a stable map
$\mathfrak {X}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
. By Proposition 4.5, there is a stable map
 $f:\mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
$f:\mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
 $\mathfrak { D}:=(\mathfrak {D}^\Uparrow , \mathfrak {D}^\Downarrow )$
. We construct a stable map
$\mathfrak { D}:=(\mathfrak {D}^\Uparrow , \mathfrak {D}^\Downarrow )$
. We construct a stable map
 $g:\sigma \rho \mathfrak {X}\to \mathfrak {F}$
which satisfies the BDC for
$g:\sigma \rho \mathfrak {X}\to \mathfrak {F}$
which satisfies the BDC for
 $\mathfrak { D}$
.
$\mathfrak { D}$
.
Let
 $C:=\{x_1, \ldots , x_n\}\subseteq F$
be some cluster and let
$C:=\{x_1, \ldots , x_n\}\subseteq F$
be some cluster and let
 $Z_C:=f^{-1}(C)$
. Since f is relation-preserving,
$Z_C:=f^{-1}(C)$
. Since f is relation-preserving,
 $Z_C$
does not cut clusters. Therefore, by Proposition 3.2,
$Z_C$
does not cut clusters. Therefore, by Proposition 3.2,
 $\varrho [Z_C]$
is clopen, and so is
$\varrho [Z_C]$
is clopen, and so is
 $f^{-1}(x_i)$
for each
$f^{-1}(x_i)$
for each
 $x_i\in C$
. Now for each
$x_i\in C$
. Now for each
 $x_i\in C$
let
$x_i\in C$
let
 $$ \begin{align*} M_i&:=\mathit{max}_R(f^{-1}(x_i)),\\ N_i&:=\mathit{min}_R(f^{-1}(x_i)). \end{align*} $$
$$ \begin{align*} M_i&:=\mathit{max}_R(f^{-1}(x_i)),\\ N_i&:=\mathit{min}_R(f^{-1}(x_i)). \end{align*} $$
By Proposition 2.11 and Corollary 2.13, both
 $M_i, N_i$
are closed, and moreover neither cuts any cluster. Consequently, by Proposition 3.2 again, both
$M_i, N_i$
are closed, and moreover neither cuts any cluster. Consequently, by Proposition 3.2 again, both
 $\varrho [M_i], \varrho [N_i]$
are closed as well.
$\varrho [M_i], \varrho [N_i]$
are closed as well.
For each
 $x_i\in C$
let
$x_i\in C$
let
 $O_i:=M_i\cup N_i$
. Clearly,
$O_i:=M_i\cup N_i$
. Clearly,
 $O_i\cap O_j=\varnothing $
for each distinct
$O_i\cap O_j=\varnothing $
for each distinct
 $i, j\leq n$
, and since no
$i, j\leq n$
, and since no
 $O_i$
cuts any cluster this implies
$O_i$
cuts any cluster this implies
 $\varrho [O_i]\cap \varrho [O_j]$
for each distinct
$\varrho [O_i]\cap \varrho [O_j]$
for each distinct
 $i, j\leq n$
. We shall now find disjoint clopens
$i, j\leq n$
. We shall now find disjoint clopens
 $U_1, \ldots , U_n\in \mathsf {Clop}(\sigma \rho \mathfrak {X})$
with
$U_1, \ldots , U_n\in \mathsf {Clop}(\sigma \rho \mathfrak {X})$
with
 $\varrho [O_i]\subseteq U_i$
and
$\varrho [O_i]\subseteq U_i$
and
 $\bigcup _i U_i=\varrho [Z_C]$
. Let
$\bigcup _i U_i=\varrho [Z_C]$
. Let
 $k\leq n$
and assume that
$k\leq n$
and assume that
 $U_i$
has been defined for all
$U_i$
has been defined for all
 $i<k$
. If
$i<k$
. If
 $k=n$
, put
$k=n$
, put
 $U_n=\varrho [Z_C]\smallsetminus \left (\bigcup _{i< k} U_i\right )$
and we are done. Otherwise set
$U_n=\varrho [Z_C]\smallsetminus \left (\bigcup _{i< k} U_i\right )$
and we are done. Otherwise set
 $V_k:=\varrho [Z_C]\smallsetminus \left (\bigcup _{i< k} U_i\right )$
and observe that it contains each
$V_k:=\varrho [Z_C]\smallsetminus \left (\bigcup _{i< k} U_i\right )$
and observe that it contains each
 $\varrho [O_i]$
for
$\varrho [O_i]$
for
 $k\leq i\leq n$
. By the separation properties of Stone spaces, for each i with
$k\leq i\leq n$
. By the separation properties of Stone spaces, for each i with
 $k<i\leq n,$
there is some
$k<i\leq n,$
there is some
 $U_{k_i}\in \mathsf {Clop}(\sigma \rho \mathfrak {X})$
with
$U_{k_i}\in \mathsf {Clop}(\sigma \rho \mathfrak {X})$
with
 $\varrho [O_k]\subseteq U_{k_i}$
and
$\varrho [O_k]\subseteq U_{k_i}$
and
 $\varrho [M_i]\cap U_{k_i}=\varnothing $
. Then set
$\varrho [M_i]\cap U_{k_i}=\varnothing $
. Then set
 $U_k:=\bigcap _{k<i\leq n} U_{k_i}\cap V_k$
.
$U_k:=\bigcap _{k<i\leq n} U_{k_i}\cap V_k$
.
We can now define a map
 $$ \begin{align*} g_C&: \varrho[Z_C]\to C\\ z&\mapsto x_i\iff z\in U_i. \end{align*} $$
$$ \begin{align*} g_C&: \varrho[Z_C]\to C\\ z&\mapsto x_i\iff z\in U_i. \end{align*} $$
Clearly,
 $g_C$
is relation preserving. Finally, define
$g_C$
is relation preserving. Finally, define
 $g: \sigma \rho \mathfrak {X}\to \mathfrak{F}$
by setting
$g: \sigma \rho \mathfrak {X}\to \mathfrak{F}$
by setting
 $$\begin{align*}g(\varrho(z)):=\begin{cases} f(z)&\text{ if } f(z)\text{ does not belong to any proper cluster},\\ g_C(\varrho(z))&\text{ if }f(z)\in C\text{ for some proper cluster }C\subseteq F. \end{cases} \end{align*}$$
$$\begin{align*}g(\varrho(z)):=\begin{cases} f(z)&\text{ if } f(z)\text{ does not belong to any proper cluster},\\ g_C(\varrho(z))&\text{ if }f(z)\in C\text{ for some proper cluster }C\subseteq F. \end{cases} \end{align*}$$
Now, g is evidently relation preserving. Moreover, it is continuous because both f and each
 $g_C$
are. Thus, g is a stable map.
$g_C$
are. Thus, g is a stable map.
We must now show that g satisfies the BDC for
 $\mathfrak { D}$
. Suppose
$\mathfrak { D}$
. Suppose
 $Rg(\varrho (x)) y$
and
$Rg(\varrho (x)) y$
and
 $y\in \mathfrak {d}$
for some
$y\in \mathfrak {d}$
for some
 $\mathfrak {d}\in \mathfrak {D}^\Uparrow $
. By construction,
$\mathfrak {d}\in \mathfrak {D}^\Uparrow $
. By construction,
 $f(x)$
belongs to the same cluster as
$f(x)$
belongs to the same cluster as
 $g(\varrho (x))$
, so also
$g(\varrho (x))$
, so also
 $Rf(x)y$
. Since f satisfies the BDC
$Rf(x)y$
. Since f satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}^\Uparrow $
, there must be some
$\mathfrak {D}^\Uparrow $
, there must be some
 $z\in X$
such that
$z\in X$
such that
 $Rxz$
and
$Rxz$
and
 $f(z)\in \mathfrak {d}$
. Since
$f(z)\in \mathfrak {d}$
. Since
 $f^{-1}(f(z))\in \mathsf {Clop}(\mathfrak {X})$
, by Proposition 2.11 and Corollary 2.13, there is
$f^{-1}(f(z))\in \mathsf {Clop}(\mathfrak {X})$
, by Proposition 2.11 and Corollary 2.13, there is
 $z'\in \mathit {max}(f^{-1}(f(z)))$
with
$z'\in \mathit {max}(f^{-1}(f(z)))$
with
 $Rzz'$
. Then also
$Rzz'$
. Then also
 $Rxz'$
and
$Rxz'$
and
 $f(z')\in \mathfrak {d}$
. But from
$f(z')\in \mathfrak {d}$
. But from
 $z'\in \mathit {max}(f^{-1}(f(z))),$
it follows that
$z'\in \mathit {max}(f^{-1}(f(z))),$
it follows that
 $f(z')=g(\varrho (z'))$
by construction, so we have
$f(z')=g(\varrho (z'))$
by construction, so we have
 $g(\varrho (z'))\in \mathfrak {d}$
. As clearly
$g(\varrho (z'))\in \mathfrak {d}$
. As clearly
 $R\varrho (x)\varrho (z')$
, we have shown that g satisfies the BDC
$R\varrho (x)\varrho (z')$
, we have shown that g satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}^\Uparrow $
. Analogous reasoning establishes that g satisfies the BDC
$\mathfrak {D}^\Uparrow $
. Analogous reasoning establishes that g satisfies the BDC
 $^\Downarrow $
for
$^\Downarrow $
for
 $\mathfrak {D}^\Downarrow $
. By Proposition 4.5, this implies
$\mathfrak {D}^\Downarrow $
. By Proposition 4.5, this implies
 $\sigma \rho \mathfrak {X}\not \models \mu (\mathfrak {F}, {\mathfrak {D}})$
.
$\sigma \rho \mathfrak {X}\not \models \mu (\mathfrak {F}, {\mathfrak {D}})$
.
Proof of Case s = 1.
To obtain a proof of this case, one runs essentially the same argument, but ignoring the sets
 $N_i$
in the construction of the map g. That is, one partitions each
$N_i$
in the construction of the map g. That is, one partitions each
 $\varrho [Z_C]$
into disjoint clopens, in such a way that each closed set of the form
$\varrho [Z_C]$
into disjoint clopens, in such a way that each closed set of the form
 $\varrho [M_i]$
, instead of
$\varrho [M_i]$
, instead of
 $\varrho [O_i]$
, is contained in one of such clopens. The rest of the construction is carried out the same way.
$\varrho [O_i]$
, is contained in one of such clopens. The rest of the construction is carried out the same way.
Proof of Case s = 3.
As before, we prove the dual statement
 $\mathfrak {M}_*\not \models \Gamma /\Delta $
implies
$\mathfrak {M}_*\not \models \Gamma /\Delta $
implies
 $\sigma \rho \mathfrak {M}_*\not \models \Gamma /\Delta $
. Let
$\sigma \rho \mathfrak {M}_*\not \models \Gamma /\Delta $
. Let
 $\mathfrak {X}:=\mathfrak {M}_*$
. Using Theorem 4.10, wlog, we restrict attention to the case
$\mathfrak {X}:=\mathfrak {M}_*$
. Using Theorem 4.10, wlog, we restrict attention to the case
 $\Gamma /\Delta =\mu (\mathfrak {F}, {\mathfrak {D}})$
, for
$\Gamma /\Delta =\mu (\mathfrak {F}, {\mathfrak {D}})$
, for
 $\mathfrak {F}$
the dual of a finite
$\mathfrak {F}$
the dual of a finite
 $\mathtt {K4}$
-algebra. By Proposition 4.5, we take a stable map
$\mathtt {K4}$
-algebra. By Proposition 4.5, we take a stable map
 $f:\mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
$f:\mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
 $\mathfrak { D}$
.
$\mathfrak { D}$
.
Given a cluster
 $C:=\{x_1, \ldots , x_n\}\subseteq F$
we let
$C:=\{x_1, \ldots , x_n\}\subseteq F$
we let
 $Z_C:=f^{-1}(C)$
. Then
$Z_C:=f^{-1}(C)$
. Then
 $Z_C$
does not cut clusters, so by Proposition 3.2,
$Z_C$
does not cut clusters, so by Proposition 3.2,
 $\varrho [Z_C]$
is clopen, and so is
$\varrho [Z_C]$
is clopen, and so is
 $f^{-1}(x_i)$
for each
$f^{-1}(x_i)$
for each
 $x_i\in C$
. For each
$x_i\in C$
. For each
 $x_i\in C,$
we let
$x_i\in C,$
we let
 $$ \begin{align*} M_i&:=\mathit{max}_R(f^{-1}(x_i)). \end{align*} $$
$$ \begin{align*} M_i&:=\mathit{max}_R(f^{-1}(x_i)). \end{align*} $$
By Proposition 2.11 and Corollary 2.17, each
 $M_i$
is clopen and does not cut any cluster. Consequently, by Proposition 3.2, each
$M_i$
is clopen and does not cut any cluster. Consequently, by Proposition 3.2, each
 $\varrho [M_i]$
is clopen.
$\varrho [M_i]$
is clopen.
Note
 $M_i\cap M_j=\varnothing $
holds for each distinct
$M_i\cap M_j=\varnothing $
holds for each distinct
 $i, j\leq n$
, and since no
$i, j\leq n$
, and since no
 $M_i$
cuts clusters we have
$M_i$
cuts clusters we have
 $\varrho [M_i]\cap \varrho [M_j]=\varnothing $
for each distinct
$\varrho [M_i]\cap \varrho [M_j]=\varnothing $
for each distinct
 $i, j\leq n$
. Constructing the desired partition of
$i, j\leq n$
. Constructing the desired partition of
 $\varrho [Z_C]$
into clopen sets is now simpler. First, for
$\varrho [Z_C]$
into clopen sets is now simpler. First, for
 $k<n$
let
$k<n$
let
 $U_k=\varrho [M_k]$
. Then let
$U_k=\varrho [M_k]$
. Then let
 $U_n:=\varrho [Z_C]\smallsetminus (U_1\cup \cdots \cup U_n)$
. Then
$U_n:=\varrho [Z_C]\smallsetminus (U_1\cup \cdots \cup U_n)$
. Then
 $U_1, \ldots , U_n$
are clopen sets which partition
$U_1, \ldots , U_n$
are clopen sets which partition
 $\varrho [Z_C]$
, such that
$\varrho [Z_C]$
, such that
 $\varrho [M_k]\subseteq U_k$
for each
$\varrho [M_k]\subseteq U_k$
for each
 $1\leq k\leq n$
.
$1\leq k\leq n$
.
We define our map
 $g:\sigma _{3}\rho _{3}\mathfrak {X}\to \mathfrak {F}$
as before. First, we let
$g:\sigma _{3}\rho _{3}\mathfrak {X}\to \mathfrak {F}$
as before. First, we let
 $$ \begin{align*} g_C&: \varrho[Z_C]\to C\\ z&\mapsto x_i\iff z\in U_i. \end{align*} $$
$$ \begin{align*} g_C&: \varrho[Z_C]\to C\\ z&\mapsto x_i\iff z\in U_i. \end{align*} $$
Clearly,
 $g_C$
is relation preserving. Finally, define
$g_C$
is relation preserving. Finally, define
 $g: \sigma _{3}\rho _{3}\mathfrak {X}\to \mathfrak{F}$
by setting
$g: \sigma _{3}\rho _{3}\mathfrak {X}\to \mathfrak{F}$
by setting
 $$\begin{align*}g(\varrho(z)):=\begin{cases} f(z)&\text{ if} f(z) \text{ belongs to no proper cluster}, \\ g_C(\varrho(z))&\text{ if }f(z)\in C\text{ for some proper cluster }C\subseteq F. \end{cases} \end{align*}$$
$$\begin{align*}g(\varrho(z)):=\begin{cases} f(z)&\text{ if} f(z) \text{ belongs to no proper cluster}, \\ g_C(\varrho(z))&\text{ if }f(z)\in C\text{ for some proper cluster }C\subseteq F. \end{cases} \end{align*}$$
It is clear that g is a stable map. We show that it satisfies the BDC for
 $\mathfrak {D}$
.
$\mathfrak {D}$
.
Suppose
 $Rg(\varrho (x))y$
and
$Rg(\varrho (x))y$
and
 $y\in \mathfrak {d}$
for some
$y\in \mathfrak {d}$
for some
 $\mathfrak {d}\in \mathfrak {D}$
. If
$\mathfrak {d}\in \mathfrak {D}$
. If ![]() belongs to no proper cluster, then
belongs to no proper cluster, then
 $g(\varrho (x))=f(x)$
, so
$g(\varrho (x))=f(x)$
, so
 $Rf(x)z$
. If
$Rf(x)z$
. If
 $f(x)$
belongs to a proper cluster, then
$f(x)$
belongs to a proper cluster, then
 $g(\varrho (x))$
belongs to the same proper cluster, so again
$g(\varrho (x))$
belongs to the same proper cluster, so again
 $Rf(x)z$
. Either way,
$Rf(x)z$
. Either way,
 $Rf(x)z$
. Since f satisfies the BDC for
$Rf(x)z$
. Since f satisfies the BDC for
 $\mathfrak {d}$
, there must be some
$\mathfrak {d}$
, there must be some
 $x\in Z$
such that
$x\in Z$
such that
 $Rxz$
and
$Rxz$
and
 $f(z)\in \mathfrak {d}$
. Now,
$f(z)\in \mathfrak {d}$
. Now, ![]() , so by Proposition 2.11 and Corollary 2.17, one of the following conditions hold:
, so by Proposition 2.11 and Corollary 2.17, one of the following conditions hold:
-
(1)
$z\in \mathit {max}(f^{-1}(f(z)))$
; -
(2) There is
$z'\in \mathit {max}(f^{-1}(f(z)))$
with
$Rzz'$
.



Either way, there is
 $z'\in \mathit {max}(f^{-1}(f(z)))$
such that
$z'\in \mathit {max}(f^{-1}(f(z)))$
such that
 $Rxz'$
. But by construction, since
$Rxz'$
. But by construction, since
 $z'\in \mathit {max}(f^{-1}(f(z)))$
, we have
$z'\in \mathit {max}(f^{-1}(f(z)))$
, we have
 $f(z')=g(\varrho (z'))$
. Consequently,
$f(z')=g(\varrho (z'))$
. Consequently,
 $g(\varrho (z'))\in \mathfrak {d}$
. As clearly
$g(\varrho (z'))\in \mathfrak {d}$
. As clearly
 $R\varrho (x)\varrho (z')$
, we have shown that g satisfies the BDC for
$R\varrho (x)\varrho (z')$
, we have shown that g satisfies the BDC for
 $\mathfrak {D}$
.
$\mathfrak {D}$
.
Our main lemma has the following key consequence.
Theorem 5.2 (Skeletal generation theorem).
Let
 $s\in \{1, 2, 3\}$
. Every universal class
$s\in \{1, 2, 3\}$
. Every universal class
 $\mathcal {U}\in \mathcal {C}^+_s$
is generated by its skeletal elements, i.e.,
$\mathcal {U}\in \mathcal {C}^+_s$
is generated by its skeletal elements, i.e.,
 $\mathcal {U}=\sigma _{s} \rho _{s}\mathcal {U}$
.
$\mathcal {U}=\sigma _{s} \rho _{s}\mathcal {U}$
.
Proof. Since
 $\sigma \rho \mathfrak {M}$
is a subalgebra of
$\sigma \rho \mathfrak {M}$
is a subalgebra of
 $\mathfrak {M}$
for each
$\mathfrak {M}$
for each
 $\mathfrak {M}\in \mathcal {U}$
(Proposition 3.3), surely
$\mathfrak {M}\in \mathcal {U}$
(Proposition 3.3), surely
 $\sigma \rho \mathcal {U}\subseteq \mathcal {U}$
. Conversely, suppose
$\sigma \rho \mathcal {U}\subseteq \mathcal {U}$
. Conversely, suppose
 $\mathcal {U}\nvDash \Gamma /\Delta $
. Then there is
$\mathcal {U}\nvDash \Gamma /\Delta $
. Then there is
 $\mathfrak {M}\in \mathcal {U}$
with
$\mathfrak {M}\in \mathcal {U}$
with
 $\mathfrak {M}\nvDash \Gamma /\Delta $
. By Lemma 5.1, it follows that
$\mathfrak {M}\nvDash \Gamma /\Delta $
. By Lemma 5.1, it follows that
 $\sigma \rho \mathfrak {M}\nvDash \Gamma /\Delta $
. This shows
$\sigma \rho \mathfrak {M}\nvDash \Gamma /\Delta $
. This shows
 $\mathsf {ThR}(\sigma \rho \mathcal {U})\subseteq \mathsf {ThR}(\mathcal {U})$
, which is equivalent to
$\mathsf {ThR}(\sigma \rho \mathcal {U})\subseteq \mathsf {ThR}(\mathcal {U})$
, which is equivalent to
 $\mathcal {U}\subseteq \sigma \rho \mathcal {U}$
. Hence, indeed,
$\mathcal {U}\subseteq \sigma \rho \mathcal {U}$
. Hence, indeed,
 $\mathcal {U}=\sigma \rho \mathcal {U}$
.
$\mathcal {U}=\sigma \rho \mathcal {U}$
.
Remark 5.3. The restriction of Theorem 5.2 to varieties of
 $\mathtt {Grz}$
-algebras plays an important role in the algebraic proof of the Blok–Esakia theorem for si and modal logics given by Blok [Reference Blok10]. The generalization to universal classes of modal algebras is explicitly stated and proved in [Reference Stronkowski39, Lemma 4.4] using a generalization of Blok’s approach, although it also follows from [Reference Jeřábek27, Theorem 5.5]. Blok establishes the restricted version of Theorem 5.2 as a consequence of what is now known as the Blok lemma. The proof of the Blok lemma is notoriously involved. By contrast, our techniques afford a direct and, we believe, semantically transparent proof of Theorem 5.2.
$\mathtt {Grz}$
-algebras plays an important role in the algebraic proof of the Blok–Esakia theorem for si and modal logics given by Blok [Reference Blok10]. The generalization to universal classes of modal algebras is explicitly stated and proved in [Reference Stronkowski39, Lemma 4.4] using a generalization of Blok’s approach, although it also follows from [Reference Jeřábek27, Theorem 5.5]. Blok establishes the restricted version of Theorem 5.2 as a consequence of what is now known as the Blok lemma. The proof of the Blok lemma is notoriously involved. By contrast, our techniques afford a direct and, we believe, semantically transparent proof of Theorem 5.2.
5.2. Main results
The main results of this section follow from Theorem 5.2 by routine arguments; we review them here for completeness. We begin by establishing that the syntactic mappings
 $\tau , \rho , \sigma $
commute with
$\tau , \rho , \sigma $
commute with
 $\mathsf {Alg}(\cdot )$
.
$\mathsf {Alg}(\cdot )$
.
Lemma 5.4. Given
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
and let
$\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
and let
 $\mathtt {M}\in \mathbf {NExt}(\mathtt {C}_s)$
. The following conditions hold:
$\mathtt {M}\in \mathbf {NExt}(\mathtt {C}_s)$
. The following conditions hold:
 $$ \begin{align} \mathsf{Alg}(\tau_{s}\mathtt{L})\ &=\tau_{s} \mathsf{Alg}(\mathtt{L}), \end{align} $$
$$ \begin{align} \mathsf{Alg}(\tau_{s}\mathtt{L})\ &=\tau_{s} \mathsf{Alg}(\mathtt{L}), \end{align} $$
 $$ \begin{align} \mathsf{Alg}(\sigma_{s}\mathtt{L})\ &=\sigma_{s} \mathsf{Alg}(\mathtt{L}), \end{align} $$
$$ \begin{align} \mathsf{Alg}(\sigma_{s}\mathtt{L})\ &=\sigma_{s} \mathsf{Alg}(\mathtt{L}), \end{align} $$
 $$ \begin{align} \mathsf{Alg}(\rho_{s}\mathtt{M})\ &=\rho_{s} \mathsf{Alg}(\mathtt{M}). \end{align} $$
$$ \begin{align} \mathsf{Alg}(\rho_{s}\mathtt{M})\ &=\rho_{s} \mathsf{Alg}(\mathtt{M}). \end{align} $$
Proof. (16) For every
 $\mathfrak {M}\in \mathcal {C}_s,$
we have
$\mathfrak {M}\in \mathcal {C}_s,$
we have
 $\mathfrak {M}\in \mathsf {Alg}(\tau \mathtt {L})$
iff
$\mathfrak {M}\in \mathsf {Alg}(\tau \mathtt {L})$
iff
 $\mathfrak {M}\models T(\Gamma /\Delta )$
for all
$\mathfrak {M}\models T(\Gamma /\Delta )$
for all
 $\Gamma /\Delta \in \mathtt {L}$
iff
$\Gamma /\Delta \in \mathtt {L}$
iff
 $\rho \mathfrak {M}\models \Gamma /\Delta $
for all
$\rho \mathfrak {M}\models \Gamma /\Delta $
for all
 $\Gamma /\Delta \in \mathtt {L}$
iff
$\Gamma /\Delta \in \mathtt {L}$
iff
 $\rho \mathfrak {M}\in \mathsf {Alg}(\mathtt {L})$
iff
$\rho \mathfrak {M}\in \mathsf {Alg}(\mathtt {L})$
iff
 $\mathfrak {M}\in \tau \mathsf {Alg}(\mathtt {L})$
.
$\mathfrak {M}\in \tau \mathsf {Alg}(\mathtt {L})$
.
(17) In view of Theorem 5.2, it suffices to show that
 $\mathsf {Alg}(\sigma \mathtt {L})$
and
$\mathsf {Alg}(\sigma \mathtt {L})$
and
 $\sigma \mathsf {Alg}(\mathtt {L})$
have the same skeletal elements. So let
$\sigma \mathsf {Alg}(\mathtt {L})$
have the same skeletal elements. So let
 $\mathfrak {M}=\sigma \rho \mathfrak {M}\in \sigma \mathsf {Alg}(\mathtt {L})$
. Since
$\mathfrak {M}=\sigma \rho \mathfrak {M}\in \sigma \mathsf {Alg}(\mathtt {L})$
. Since
 $\sigma \mathsf {Alg}(\mathtt {L})$
is generated by
$\sigma \mathsf {Alg}(\mathtt {L})$
is generated by
 $\{\sigma \mathfrak {H}:\mathfrak {H}\in \mathsf {Alg}(\mathtt {L})\}$
as a universal class, by Proposition 3.3 and Lemma 3.4, we have
$\{\sigma \mathfrak {H}:\mathfrak {H}\in \mathsf {Alg}(\mathtt {L})\}$
as a universal class, by Proposition 3.3 and Lemma 3.4, we have
 $\mathfrak {M}\models T(\Gamma /\Delta )$
for every
$\mathfrak {M}\models T(\Gamma /\Delta )$
for every
 $\Gamma /\Delta \in \mathtt {L}$
. But then
$\Gamma /\Delta \in \mathtt {L}$
. But then
 $\mathfrak {M}\in \mathsf {Alg}(\sigma \mathtt {L})$
. Conversely, assume
$\mathfrak {M}\in \mathsf {Alg}(\sigma \mathtt {L})$
. Conversely, assume
 $\mathfrak {M}=\sigma \rho \mathfrak {M}\in \mathsf {Alg}(\sigma \mathtt {L})$
. Then
$\mathfrak {M}=\sigma \rho \mathfrak {M}\in \mathsf {Alg}(\sigma \mathtt {L})$
. Then
 $\mathfrak {M}\models T(\Gamma /\Delta )$
for every
$\mathfrak {M}\models T(\Gamma /\Delta )$
for every
 $\Gamma /\Delta \in \mathtt {L}$
. By Lemma 3.4, this is equivalent to
$\Gamma /\Delta \in \mathtt {L}$
. By Lemma 3.4, this is equivalent to
 $\rho \mathfrak {M}\in \mathsf {Alg}(\mathtt {L})$
, therefore
$\rho \mathfrak {M}\in \mathsf {Alg}(\mathtt {L})$
, therefore
 $\sigma \rho \mathfrak {M}=\mathfrak {M}\in \sigma \mathsf {Alg}(\mathtt {L})$
.
$\sigma \rho \mathfrak {M}=\mathfrak {M}\in \sigma \mathsf {Alg}(\mathtt {L})$
.
(18) Let
 $\mathfrak {H}\in \rho \mathsf {Alg}(\mathtt {M})$
. Then
$\mathfrak {H}\in \rho \mathsf {Alg}(\mathtt {M})$
. Then
 $\mathfrak {H}=\rho \mathfrak {M}$
for some
$\mathfrak {H}=\rho \mathfrak {M}$
for some
 $\mathfrak {M}\in \mathsf {Alg}(\mathtt {M})$
. It follows that for every si rule
$\mathfrak {M}\in \mathsf {Alg}(\mathtt {M})$
. It follows that for every si rule
 $T(\Gamma /\Delta )\in \mathtt {M,}$
we have
$T(\Gamma /\Delta )\in \mathtt {M,}$
we have
 $\mathfrak {M}\models T(\Gamma /\Delta )$
, and so by Lemma 3.4, in turn
$\mathfrak {M}\models T(\Gamma /\Delta )$
, and so by Lemma 3.4, in turn
 $\mathfrak {H}\models \Gamma /\Delta $
. Therefore indeed
$\mathfrak {H}\models \Gamma /\Delta $
. Therefore indeed
 $\mathfrak {H}\in \mathsf {Alg}(\rho \mathtt {M})$
. Conversely, for all rules
$\mathfrak {H}\in \mathsf {Alg}(\rho \mathtt {M})$
. Conversely, for all rules
 $\Gamma /\Delta $
, if
$\Gamma /\Delta $
, if
 $\rho \mathsf {Alg}(\mathtt {M})\models \Gamma /\Delta $
, then by Lemma 3.4,
$\rho \mathsf {Alg}(\mathtt {M})\models \Gamma /\Delta $
, then by Lemma 3.4,
 $\mathsf {Alg}(\mathtt {M})\models T(\Gamma /\Delta )$
, hence
$\mathsf {Alg}(\mathtt {M})\models T(\Gamma /\Delta )$
, hence
 $\Gamma /\Delta \in \rho \mathtt {M}$
. Thus
$\Gamma /\Delta \in \rho \mathtt {M}$
. Thus
 $\mathsf {ThR}(\rho \mathsf {Alg}(\mathtt {M}))\subseteq \rho \mathtt {M}$
, and so
$\mathsf {ThR}(\rho \mathsf {Alg}(\mathtt {M}))\subseteq \rho \mathtt {M}$
, and so
 $\mathsf {Alg}(\rho \mathtt {M})\subseteq \rho \mathsf {Alg}(\mathtt {M})$
.
$\mathsf {Alg}(\rho \mathtt {M})\subseteq \rho \mathsf {Alg}(\mathtt {M})$
.
The result just proved leads straightforwardly to the following, purely semantic characterization of companions.
Lemma 5.5. Given
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
and let
$\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
and let
 $\mathtt {M}\in \mathbf {NExt}(\mathtt {C}_s)$
. Then
$\mathtt {M}\in \mathbf {NExt}(\mathtt {C}_s)$
. Then
 $\mathtt {M}$
is a companion of
$\mathtt {M}$
is a companion of
 $\mathtt {L}$
iff
$\mathtt {L}$
iff
 $\mathsf {Alg}(\mathtt {L})=\rho _{s}\mathsf {Alg}(\mathtt {M})$
.
$\mathsf {Alg}(\mathtt {L})=\rho _{s}\mathsf {Alg}(\mathtt {M})$
.
Proof.
 $(\Rightarrow )$
Assume
$(\Rightarrow )$
Assume
 $\mathtt {M}$
is a companion of
$\mathtt {M}$
is a companion of
 $\mathtt {L}$
. Then we have
$\mathtt {L}$
. Then we have
 $\mathtt {L}=\rho \mathtt {M}$
. By Lemma 5.4,
$\mathtt {L}=\rho \mathtt {M}$
. By Lemma 5.4,
 $\mathsf {Alg}(\mathtt {L})=\rho \mathsf {Alg}(\mathtt {M})$
.
$\mathsf {Alg}(\mathtt {L})=\rho \mathsf {Alg}(\mathtt {M})$
.
 $(\Leftarrow )$
Assume that
$(\Leftarrow )$
Assume that
 $\mathsf {Alg}(\mathtt {L})=\rho \mathsf {Alg}(\mathtt {M})$
. Therefore, by Proposition 3.3,
$\mathsf {Alg}(\mathtt {L})=\rho \mathsf {Alg}(\mathtt {M})$
. Therefore, by Proposition 3.3,
 $\mathfrak {H}\in \mathsf {Alg}(\mathtt {L})$
implies
$\mathfrak {H}\in \mathsf {Alg}(\mathtt {L})$
implies
 $\sigma \mathfrak {H}\in \mathsf {Alg}(\mathtt {M})$
. This implies that for every rule
$\sigma \mathfrak {H}\in \mathsf {Alg}(\mathtt {M})$
. This implies that for every rule
 $\Gamma /\Delta $
,
$\Gamma /\Delta $
,
 $\Gamma /\Delta \in \mathtt {L}$
iff
$\Gamma /\Delta \in \mathtt {L}$
iff
 ${T(\Gamma /\Delta )\in \mathtt {M}}$
.
${T(\Gamma /\Delta )\in \mathtt {M}}$
.
We can now prove the main results of this section. The first result asserts that the companions of a rule system form an interval.
Theorem 5.6 (Interval theorem).
Given
 $s\in \{1, 2, 3\}$
, let
$s\in \{1, 2, 3\}$
, let
 $\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
. The companions of
$\mathtt {L}\in \mathbf {Ext}(\mathtt {I}_s)$
. The companions of
 $\mathtt {L}$
form an interval in
$\mathtt {L}$
form an interval in
 $\mathbf {NExt}(\mathtt {C}_s)$
, where the least and greatest companions are given by
$\mathbf {NExt}(\mathtt {C}_s)$
, where the least and greatest companions are given by
 $\tau _{s}\mathtt {L}$
and
$\tau _{s}\mathtt {L}$
and
 $\sigma _{s}\mathtt {L}$
.
$\sigma _{s}\mathtt {L}$
.
Proof. In view of Lemma 5.4, it suffices to prove that
 $\mathtt {M}$
is a companion of
$\mathtt {M}$
is a companion of
 $\mathtt {L}$
iff
$\mathtt {L}$
iff
 $\sigma \mathsf {Alg}(\mathtt {L})\subseteq \mathsf {Alg}(\mathtt {M})\subseteq \tau \mathsf {Alg}(\mathtt {L})$
.
$\sigma \mathsf {Alg}(\mathtt {L})\subseteq \mathsf {Alg}(\mathtt {M})\subseteq \tau \mathsf {Alg}(\mathtt {L})$
.
(
 $\Rightarrow $
) Assume
$\Rightarrow $
) Assume
 $\mathtt {M}$
is a modal companion of
$\mathtt {M}$
is a modal companion of
 $\mathtt {L}$
. Then by Lemma 5.5, we have
$\mathtt {L}$
. Then by Lemma 5.5, we have
 $\mathsf {Alg}(\mathtt {L})=\rho \mathsf {Alg}(\mathtt {M})$
, therefore it is clear that
$\mathsf {Alg}(\mathtt {L})=\rho \mathsf {Alg}(\mathtt {M})$
, therefore it is clear that
 $\mathsf {Alg}(\mathtt {M})\subseteq \tau \mathsf {Alg}(\mathtt {L})$
. To see that
$\mathsf {Alg}(\mathtt {M})\subseteq \tau \mathsf {Alg}(\mathtt {L})$
. To see that
 $\sigma \mathsf {Alg}(\mathtt {L})\subseteq \mathsf {Alg}(\mathtt {M})$
it suffices to show that every skeletal algebra in
$\sigma \mathsf {Alg}(\mathtt {L})\subseteq \mathsf {Alg}(\mathtt {M})$
it suffices to show that every skeletal algebra in
 $\sigma \mathsf {Alg}(\mathtt {L})$
belongs to
$\sigma \mathsf {Alg}(\mathtt {L})$
belongs to
 $\mathsf {Alg}(\mathtt {M})$
. So let
$\mathsf {Alg}(\mathtt {M})$
. So let
 $\mathfrak {M}\cong \sigma \rho \mathfrak {M}\in \sigma \mathsf {Alg}(\mathtt {L})$
. Then
$\mathfrak {M}\cong \sigma \rho \mathfrak {M}\in \sigma \mathsf {Alg}(\mathtt {L})$
. Then
 $\rho \mathfrak {M}\in \mathsf {Alg}(\mathtt {L})$
by Lemma 3.4, so there must be
$\rho \mathfrak {M}\in \mathsf {Alg}(\mathtt {L})$
by Lemma 3.4, so there must be
 $\mathfrak {N}\in \mathsf {Alg}(\mathtt {M})$
such that
$\mathfrak {N}\in \mathsf {Alg}(\mathtt {M})$
such that
 $\rho \mathfrak {N}\cong \rho \mathfrak {M}$
. But this implies
$\rho \mathfrak {N}\cong \rho \mathfrak {M}$
. But this implies
 $\sigma \rho \mathfrak {N}\cong \sigma \rho \mathfrak {M}\cong \mathfrak {M}$
, and as universal classes are closed under subalgebras, by Proposition 3.3, we conclude
$\sigma \rho \mathfrak {N}\cong \sigma \rho \mathfrak {M}\cong \mathfrak {M}$
, and as universal classes are closed under subalgebras, by Proposition 3.3, we conclude
 $\mathfrak {M}\in \mathsf {Alg}(\mathtt {M})$
.
$\mathfrak {M}\in \mathsf {Alg}(\mathtt {M})$
.
(
 $\Leftarrow $
) Assume
$\Leftarrow $
) Assume
 $\sigma \mathsf {Alg}(\mathtt {L})\subseteq \mathsf {Alg}(\mathtt {M})\subseteq \tau \mathsf {Alg}(\mathtt {L})$
. It is an immediate consequence of Proposition 3.3 that
$\sigma \mathsf {Alg}(\mathtt {L})\subseteq \mathsf {Alg}(\mathtt {M})\subseteq \tau \mathsf {Alg}(\mathtt {L})$
. It is an immediate consequence of Proposition 3.3 that
 $\rho \sigma \mathsf {Alg}(\mathtt {L})=\mathsf {Alg}(\mathtt {L})$
, which gives us
$\rho \sigma \mathsf {Alg}(\mathtt {L})=\mathsf {Alg}(\mathtt {L})$
, which gives us
 $\rho \mathsf {Alg}(\mathtt {M})\supseteq \mathsf {Alg}(\mathtt {L})$
. But by construction
$\rho \mathsf {Alg}(\mathtt {M})\supseteq \mathsf {Alg}(\mathtt {L})$
. But by construction
 $\rho \mathsf {Alg}(\mathtt {M})=\rho \tau \mathsf {Alg}(\mathtt {L})$
, hence
$\rho \mathsf {Alg}(\mathtt {M})=\rho \tau \mathsf {Alg}(\mathtt {L})$
, hence
 $\rho \mathsf {Alg}(\mathtt {M})\subseteq \mathsf {Alg}(\mathtt {L})$
. Therefore, indeed,
$\rho \mathsf {Alg}(\mathtt {M})\subseteq \mathsf {Alg}(\mathtt {L})$
. Therefore, indeed,
 $\rho \mathsf {Alg}(\mathtt {M})=\mathsf {Alg}(\mathtt {L})$
, so by Lemma 5.5, we conclude that
$\rho \mathsf {Alg}(\mathtt {M})=\mathsf {Alg}(\mathtt {L})$
, so by Lemma 5.5, we conclude that
 $\mathtt {M}$
is a modal companion of
$\mathtt {M}$
is a modal companion of
 $\mathtt {L}$
.
$\mathtt {L}$
.
The second result is an analogue of the Blok–Esakia theorem. We use the qualifier “general” to indicate that the theorem applies uniformly to three different pairs of signatures.
Theorem 5.7 (General Blok–Esakia theorem).
Let
 $s\in \{1, 2, 3\}$
. The mappings
$s\in \{1, 2, 3\}$
. The mappings
 $\sigma _{s}$
and the restriction of
$\sigma _{s}$
and the restriction of
 $\rho $
to
$\rho $
to
 $\mathbf {NExt}(\mathtt {C}^+_s)$
are mutually inverse complete lattice isomorphisms between
$\mathbf {NExt}(\mathtt {C}^+_s)$
are mutually inverse complete lattice isomorphisms between
 $\mathbf {Ext}(\mathtt {I_s})$
and
$\mathbf {Ext}(\mathtt {I_s})$
and
 $\mathbf {NExt}(\mathtt {C}^+_s)$
.
$\mathbf {NExt}(\mathtt {C}^+_s)$
.
Proof. It is enough to show that the algebraic class operators
 $\sigma : \mathbf {Uni}(\mathcal {I}_s)\to \mathbf {Uni}(\mathcal {C}^+_s)$
and
$\sigma : \mathbf {Uni}(\mathcal {I}_s)\to \mathbf {Uni}(\mathcal {C}^+_s)$
and
 $\rho :\mathbf {Uni}(\mathcal {C}^+_s)\to \mathbf {Uni}(\mathcal {I}_s)$
are complete lattice isomorphisms and mutual inverses. Both maps are evidently order preserving, and preservation of infinite joins is an easy consequence of Lemma 3.4. Let
$\rho :\mathbf {Uni}(\mathcal {C}^+_s)\to \mathbf {Uni}(\mathcal {I}_s)$
are complete lattice isomorphisms and mutual inverses. Both maps are evidently order preserving, and preservation of infinite joins is an easy consequence of Lemma 3.4. Let
 $\mathcal {U}\in \mathbf {Uni}(\mathcal {C}^+_s)$
. Then
$\mathcal {U}\in \mathbf {Uni}(\mathcal {C}^+_s)$
. Then
 $\mathcal {U}=\sigma \rho \mathcal {U}$
by Theorem 5.2, so
$\mathcal {U}=\sigma \rho \mathcal {U}$
by Theorem 5.2, so
 $\sigma $
is surjective and a left inverse of
$\sigma $
is surjective and a left inverse of
 $\rho $
. Now let
$\rho $
. Now let
 $\mathcal {U}\in \mathbf {Uni}(\mathcal {I}_s)$
. It is an immediate consequence of Proposition 3.3 that
$\mathcal {U}\in \mathbf {Uni}(\mathcal {I}_s)$
. It is an immediate consequence of Proposition 3.3 that
 $\rho \sigma \mathcal {U}=\mathcal {U}$
. Hence
$\rho \sigma \mathcal {U}=\mathcal {U}$
. Hence
 $\rho $
is surjective and a left inverse of
$\rho $
is surjective and a left inverse of
 $\sigma $
. Thus
$\sigma $
. Thus
 $\sigma $
and
$\sigma $
and
 $\rho $
are mutual inverses, and therefore must both be bijections.
$\rho $
are mutual inverses, and therefore must both be bijections.
We note that Theorem 5.6 remains true when restricted to lattices of logics only. This result, in the case of pair of signatures
 $1$
, was established by Maksimova and Rybakov [Reference Maksimova and Rybakov34] (see also [Reference Chagrov and Zakharyaschev14, Section 9.6]). The same holds for Theorem 5.7. Thus we obtain, as corollaries, the original Blok–Esakia theorem (case
$1$
, was established by Maksimova and Rybakov [Reference Maksimova and Rybakov34] (see also [Reference Chagrov and Zakharyaschev14, Section 9.6]). The same holds for Theorem 5.7. Thus we obtain, as corollaries, the original Blok–Esakia theorem (case
 $s=1$
), Wolter’s [Reference Wolter43] generalization thereof to bsi and tense logics (case
$s=1$
), Wolter’s [Reference Wolter43] generalization thereof to bsi and tense logics (case
 $s=2$
), as well as the original Kuznetsov–Muravitsky isomorphism (case
$s=2$
), as well as the original Kuznetsov–Muravitsky isomorphism (case
 $s=3$
).
$s=3$
).
Corollary 5.8 (General Blok–Esakia theorem for logics).
Let
 $s\in \{1, 2, 3\}$
. The restrictions of the mappings
$s\in \{1, 2, 3\}$
. The restrictions of the mappings
 $\sigma _{s}:\mathbf {Ext}(\mathtt {I_s})\to \mathbf {NExt}(\mathtt {C}^+_s)$
and
$\sigma _{s}:\mathbf {Ext}(\mathtt {I_s})\to \mathbf {NExt}(\mathtt {C}^+_s)$
and
 $\rho _{s}: \mathbf {NExt}(\mathtt {C}^+_s)\to \mathbf {Ext}(\mathtt {I_s})$
to the lattices of logics
$\rho _{s}: \mathbf {NExt}(\mathtt {C}^+_s)\to \mathbf {Ext}(\mathtt {I_s})$
to the lattices of logics
 $\mathbf {ExtL}(\mathtt {I_s})$
and
$\mathbf {ExtL}(\mathtt {I_s})$
and
 $\mathbf {NExtL}(\mathtt {C}^+_s)$
are complete lattice isomorphisms and mutual inverses.
$\mathbf {NExtL}(\mathtt {C}^+_s)$
are complete lattice isomorphisms and mutual inverses.
Proof. By construction,
 $\sigma $
and
$\sigma $
and
 $\rho $
preserve the property of being a logic, because the Gödel translation of an assumption free, single-conclusion rule is always an assumption free, single-conclusion rule. Since we already know that the restrictions of
$\rho $
preserve the property of being a logic, because the Gödel translation of an assumption free, single-conclusion rule is always an assumption free, single-conclusion rule. Since we already know that the restrictions of
 $\sigma _{s}$
and
$\sigma _{s}$
and
 $\rho _{s}$
to logics are mutual inverses, it suffices to show that
$\rho _{s}$
to logics are mutual inverses, it suffices to show that
 $\sigma _{s}$
commutes with meets and joins. This is obvious for joins, since the join of two logics is a logic. For meets, it is enough to show that
$\sigma _{s}$
commutes with meets and joins. This is obvious for joins, since the join of two logics is a logic. For meets, it is enough to show that
 $\sigma _{s}$
commutes with
$\sigma _{s}$
commutes with
 $\mathsf {Taut}$
: for each rule system
$\mathsf {Taut}$
: for each rule system
 $\mathtt {L}\in \mathbf {Ext}(\mathtt {I_s}),$
we have
$\mathtt {L}\in \mathbf {Ext}(\mathtt {I_s}),$
we have
 $\sigma _{s}\mathsf {Taut}(\mathtt {L})=\mathsf {Taut}(\sigma _{s}\mathtt {L})$
. For if this condition holds, then we have:
$\sigma _{s}\mathsf {Taut}(\mathtt {L})=\mathsf {Taut}(\sigma _{s}\mathtt {L})$
. For if this condition holds, then we have:
 $$ \begin{align*} \sigma_{s}(\mathtt{L}\otimes_{\mathbf{ExtL}(\mathtt{I_s})}\mathtt{L'})&= \sigma_{s}(\mathsf{Taut}(\mathtt{L}\otimes_{\mathbf{Ext}(\mathtt{I_s})}\mathtt{L'})) &\text{By Proposition 2.3}\\ &=\mathsf{Taut}(\sigma_{s}(\mathtt{L}\otimes_{\mathbf{Ext}(\mathtt{I_s})}\mathtt{L'}))\\ &= \mathsf{Taut}(\sigma_{s}\mathtt{L}\otimes_{\mathbf{Ext}(\mathtt{I_s})}\sigma_{s}\mathtt{L'})&\text{By Theorem 5.7}\\ &=\sigma_{s}\mathtt{L}\otimes_{\mathbf{ExtL}(\mathtt{I_s})}\sigma_{s}\mathtt{L'}. &\text{By Proposition 2.3} \end{align*} $$
$$ \begin{align*} \sigma_{s}(\mathtt{L}\otimes_{\mathbf{ExtL}(\mathtt{I_s})}\mathtt{L'})&= \sigma_{s}(\mathsf{Taut}(\mathtt{L}\otimes_{\mathbf{Ext}(\mathtt{I_s})}\mathtt{L'})) &\text{By Proposition 2.3}\\ &=\mathsf{Taut}(\sigma_{s}(\mathtt{L}\otimes_{\mathbf{Ext}(\mathtt{I_s})}\mathtt{L'}))\\ &= \mathsf{Taut}(\sigma_{s}\mathtt{L}\otimes_{\mathbf{Ext}(\mathtt{I_s})}\sigma_{s}\mathtt{L'})&\text{By Theorem 5.7}\\ &=\sigma_{s}\mathtt{L}\otimes_{\mathbf{ExtL}(\mathtt{I_s})}\sigma_{s}\mathtt{L'}. &\text{By Proposition 2.3} \end{align*} $$
Note that the reasoning is analogous when we consider infinite meets.
The claim indeed holds. Since
 $\sigma _{s}$
is order-preserving and
$\sigma _{s}$
is order-preserving and
 $\mathsf {Taut}(\mathtt {L})\subseteq \mathtt {L,}$
we have
$\mathsf {Taut}(\mathtt {L})\subseteq \mathtt {L,}$
we have
 $\sigma _{s}\mathsf {Taut}(\mathtt {L})\subseteq \sigma _{s}\mathtt {L}$
. Since
$\sigma _{s}\mathsf {Taut}(\mathtt {L})\subseteq \sigma _{s}\mathtt {L}$
. Since
 $\mathsf {Taut}$
is also order preserving and the left-hand side is already a logic, it follows that
$\mathsf {Taut}$
is also order preserving and the left-hand side is already a logic, it follows that
 $\sigma _{s}\mathsf {Taut}(\mathtt {L})\subseteq \mathsf {Taut}(\sigma _{s}\mathtt {L})$
. Likewise, if
$\sigma _{s}\mathsf {Taut}(\mathtt {L})\subseteq \mathsf {Taut}(\sigma _{s}\mathtt {L})$
. Likewise, if
 $\mathtt {M}\in \mathbf {NExt}(\mathtt {I}_s^+)$
, then
$\mathtt {M}\in \mathbf {NExt}(\mathtt {I}_s^+)$
, then
 $\rho _{s}\mathsf {Taut}(\mathtt {M})\subseteq \mathsf {Taut}(\rho _{s}\mathtt {M})$
. Thus,
$\rho _{s}\mathsf {Taut}(\mathtt {M})\subseteq \mathsf {Taut}(\rho _{s}\mathtt {M})$
. Thus,
 $$ \begin{align*} \mathsf{Taut}(\sigma_{s}\mathtt{L})&=\sigma_{s}\rho_{s}\mathsf{Taut}(\sigma_{s}\mathtt{L})\\ &\subseteq\sigma_{s}\mathsf{Taut}(\rho_{s}\sigma_{s}\mathtt{L})\\ &=\sigma_{s}\mathsf{Taut}(\mathtt{L}), \end{align*} $$
$$ \begin{align*} \mathsf{Taut}(\sigma_{s}\mathtt{L})&=\sigma_{s}\rho_{s}\mathsf{Taut}(\sigma_{s}\mathtt{L})\\ &\subseteq\sigma_{s}\mathsf{Taut}(\rho_{s}\sigma_{s}\mathtt{L})\\ &=\sigma_{s}\mathsf{Taut}(\mathtt{L}), \end{align*} $$
as desired.
6. Dummett–Lemmon conjectures
In this last section, we apply stable canonical rules to give an alternative proof of the Dummett–Lemmon conjecture for rule systems. This result states that a (b)si rule system is Kripke complete iff its weakest modal companion is. We recall that a rule system is called Kripke complete if it is of the form
 $\mathtt {L}=\{\Gamma /\Delta :\mathcal {K}\models \Gamma /\Delta \}$
for some class of Kripke frames
$\mathtt {L}=\{\Gamma /\Delta :\mathcal {K}\models \Gamma /\Delta \}$
for some class of Kripke frames
 $\mathcal {K}$
. We also remind the reader that we will not be discussing msi rule systems in this section.
$\mathcal {K}$
. We also remind the reader that we will not be discussing msi rule systems in this section.
We will need to introduce and study new operations on stable canonical rules. We first define an operation taking a (b)si stable canonical rule to a modal (resp., tense) stable canonical rule equivalent to the Gödel translation of the former.
Definition 6.1. Let
 $\eta (\mathfrak {H}, {D})$
be a (b)si stable canonical rule. The modal (resp., tense) stable canonical rule
$\eta (\mathfrak {H}, {D})$
be a (b)si stable canonical rule. The modal (resp., tense) stable canonical rule
 $\mu _\circ (\mathfrak {H}, {D})$
is defined as the rule
$\mu _\circ (\mathfrak {H}, {D})$
is defined as the rule
 $\mu (\sigma \mathfrak {H}, {D_\circ })$
, where
$\mu (\sigma \mathfrak {H}, {D_\circ })$
, where
 ${D_\circ }:=( D_\circ ^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {H})}$
and
${D_\circ }:=( D_\circ ^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {H})}$
and
 $$\begin{align*}D_\circ^\square:=\{\neg a \lor b: (a, b)\in D^\to \},\qquad D_\circ^\blacklozenge:=\{a\land \neg b: (a, b)\in D^\leftarrow\}.\end{align*}$$
$$\begin{align*}D_\circ^\square:=\{\neg a \lor b: (a, b)\in D^\to \},\qquad D_\circ^\blacklozenge:=\{a\land \neg b: (a, b)\in D^\leftarrow\}.\end{align*}$$
We call
 $\mu _\circ (\mathfrak {H}, {D})$
the modalization of
$\mu _\circ (\mathfrak {H}, {D})$
the modalization of
 $\eta (\mathfrak {H}, {D})$
. Adopting our conventions for notating stable canonical rules using spaces rather than algebras, given a (b)si stable canonical rule
$\eta (\mathfrak {H}, {D})$
. Adopting our conventions for notating stable canonical rules using spaces rather than algebras, given a (b)si stable canonical rule
 $\eta (\mathfrak {X}, {D})$
, the rule
$\eta (\mathfrak {X}, {D})$
, the rule
 $\mu _\circ (\mathfrak {X}, {\mathfrak {D}})$
is just the rule
$\mu _\circ (\mathfrak {X}, {\mathfrak {D}})$
is just the rule
 $\mu (\sigma \mathfrak {X}, {\mathfrak {D}})$
.
$\mu (\sigma \mathfrak {X}, {\mathfrak {D}})$
.
We call a rule
 ${\xi }(\mathfrak {M}, {D})$
modalized when it is the modalization of some (b)si stable canonical rule. Dually, we may characterize modalized rules as follows.
${\xi }(\mathfrak {M}, {D})$
modalized when it is the modalization of some (b)si stable canonical rule. Dually, we may characterize modalized rules as follows.
Lemma 6.2. A modal (resp., tense)
 $\mu (\mathfrak {F}, {\mathfrak {D}})$
stable canonical rule is modalized precisely when it satisfies the following conditions:
$\mu (\mathfrak {F}, {\mathfrak {D}})$
stable canonical rule is modalized precisely when it satisfies the following conditions:
-
(1)
$\mathfrak {F}$
is partially ordered; -
(2) Every
$\mathfrak {d}\in \mathfrak {D}^\square $
is of the form
$U\cap V$
, where U is an upset and V is a downset; -
(3) If
$\mathfrak {D}^\blacklozenge $
is defined, then so is every
$\mathfrak {d}\in \mathfrak {D}^\blacklozenge $
.





Proof. If
 $\mu (\mathfrak {F}, {\mathfrak {D}})$
is modalized, then
$\mu (\mathfrak {F}, {\mathfrak {D}})$
is modalized, then
 $\mathfrak {F}$
is the dual of
$\mathfrak {F}$
is the dual of
 $\sigma \mathfrak {H}$
for some finite (bi-)Heyting algebra
$\sigma \mathfrak {H}$
for some finite (bi-)Heyting algebra
 $\mathfrak {H}$
, so it is partially ordered. Furthermore, every
$\mathfrak {H}$
, so it is partially ordered. Furthermore, every
 $d\in D^\square $
is of the form
$d\in D^\square $
is of the form
 $\neg a\lor b$
for
$\neg a\lor b$
for
 $a, b\in H$
, and so
$a, b\in H$
, and so
 $\mathfrak {d}$
is of the form
$\mathfrak {d}$
is of the form
 $-\beta (\neg a\lor b)=\beta (a)\cap -\beta (b)$
. But
$-\beta (\neg a\lor b)=\beta (a)\cap -\beta (b)$
. But
 $\beta (a), \beta (b)$
are upsets, and the complement of an upset is a downset. By similar reasoning, we may infer Item 3.
$\beta (a), \beta (b)$
are upsets, and the complement of an upset is a downset. By similar reasoning, we may infer Item 3.
Conversely, assume
 $\mu (\mathfrak {F}, {\mathfrak {D}})$
satisfies the three conditions above. Then the dual of
$\mu (\mathfrak {F}, {\mathfrak {D}})$
satisfies the three conditions above. Then the dual of
 $\mathfrak {F}$
is clearly of the form
$\mathfrak {F}$
is clearly of the form
 $\sigma \mathfrak {H}$
for some finite (bi-)Heyting algebra
$\sigma \mathfrak {H}$
for some finite (bi-)Heyting algebra
 $\mathfrak {H}$
. Given
$\mathfrak {H}$
. Given
 $\mathfrak {d}=U\cap V\in \mathfrak {D}$
, by (bi-)Esakia duality, there must be
$\mathfrak {d}=U\cap V\in \mathfrak {D}$
, by (bi-)Esakia duality, there must be
 $a, b\in H$
with
$a, b\in H$
with
 $U=\beta (a)$
and
$U=\beta (a)$
and
 $V=-\beta (b)$
. But then
$V=-\beta (b)$
. But then
 $U\cap V=\beta (a)\cap -\beta (b)=-\beta (\neg a\lor b)$
, and by definition
$U\cap V=\beta (a)\cap -\beta (b)=-\beta (\neg a\lor b)$
, and by definition
 $d=\neg a\lor b$
. Likewise, if
$d=\neg a\lor b$
. Likewise, if
 $\mathfrak {D}^\blacklozenge $
is defined and
$\mathfrak {D}^\blacklozenge $
is defined and
 $\mathfrak {d}=U\cup V$
satisfies Item 3, we find that
$\mathfrak {d}=U\cup V$
satisfies Item 3, we find that
 $d= a\land \neg b$
for some
$d= a\land \neg b$
for some
 $a, b\in H$
.
$a, b\in H$
.
We now verify that modalization indeed coincides, up to equivalence over
 $\mathtt {S4(.t)}$
, with the Gödel translation.
$\mathtt {S4(.t)}$
, with the Gödel translation.
Lemma 6.3 (Rule translation lemma).
Let
 $\mathfrak {M}\in \mathsf {Alg}(\mathtt {S4(.t)})$
. For any (b)si stable canonical rule
$\mathfrak {M}\in \mathsf {Alg}(\mathtt {S4(.t)})$
. For any (b)si stable canonical rule
 $\eta (\mathfrak {H}, {D}),$
we have
$\eta (\mathfrak {H}, {D}),$
we have
 $$\begin{align*}\mathfrak{M}\models \mu_\circ(\mathfrak{H}, {D})\iff \mathfrak{M}\models T(\eta(\mathfrak{H}, {D})).\end{align*}$$
$$\begin{align*}\mathfrak{M}\models \mu_\circ(\mathfrak{H}, {D})\iff \mathfrak{M}\models T(\eta(\mathfrak{H}, {D})).\end{align*}$$
Proof. Let
 $\mathfrak {X}:=\mathfrak {M}_*$
and
$\mathfrak {X}:=\mathfrak {M}_*$
and
 $\mathfrak {F}:=\mathfrak {H}_*$
. Then
$\mathfrak {F}:=\mathfrak {H}_*$
. Then
 $\eta (\mathfrak {H}, {D})=\eta (\mathfrak {F}, {\mathfrak {D}})$
and
$\eta (\mathfrak {H}, {D})=\eta (\mathfrak {F}, {\mathfrak {D}})$
and
 $\mu _\circ (\mathfrak {H}, {D})=\mu (\sigma \mathfrak {F}, {\mathfrak {D}})$
.
$\mu _\circ (\mathfrak {H}, {D})=\mu (\sigma \mathfrak {F}, {\mathfrak {D}})$
.
 $(\Rightarrow )$
Suppose
$(\Rightarrow )$
Suppose
 $\mathfrak {X}\not \models T(\eta (\mathfrak {F}, {\mathfrak {D}}))$
. Then, by Lemma 3.4,
$\mathfrak {X}\not \models T(\eta (\mathfrak {F}, {\mathfrak {D}}))$
. Then, by Lemma 3.4,
 $\rho \mathfrak {X}\not \models \eta (\mathfrak {F}, {\mathfrak {D}})$
. Consequently, there is a stable map
$\rho \mathfrak {X}\not \models \eta (\mathfrak {F}, {\mathfrak {D}})$
. Consequently, there is a stable map
 $f: \rho \mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
$f: \rho \mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
 $\mathfrak { D}$
. We construct a stable map
$\mathfrak { D}$
. We construct a stable map
 $g: \mathfrak {X}\to \sigma \mathfrak {F}$
that also satisfies the BDC for
$g: \mathfrak {X}\to \sigma \mathfrak {F}$
that also satisfies the BDC for
 $\mathfrak { D}$
. To this end, put
$\mathfrak { D}$
. To this end, put
 $$\begin{align*}g(x):= f(\varrho (x)).\end{align*}$$
$$\begin{align*}g(x):= f(\varrho (x)).\end{align*}$$
Now, g is continuous because both f and
 $\varrho $
are. Moreover, both f and
$\varrho $
are. Moreover, both f and
 $\varrho $
are relation preserving, whence g is as well. Thus g is a stable map. We check that it satisfies the BDC for
$\varrho $
are relation preserving, whence g is as well. Thus g is a stable map. We check that it satisfies the BDC for
 $\mathfrak { D}$
. Let
$\mathfrak { D}$
. Let
 $\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and
$\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and
 $x\in X$
. Suppose there is
$x\in X$
. Suppose there is
 $y\in \mathfrak {d}$
such that
$y\in \mathfrak {d}$
such that
 $R g(x) y$
. Since f satisfies the BDC
$R g(x) y$
. Since f satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {d}$
, there must be
$\mathfrak {d}$
, there must be
 $\varrho (z)\in \rho \mathfrak {X}$
such that
$\varrho (z)\in \rho \mathfrak {X}$
such that
 $\varrho (x)\leq (\varrho (z))$
and
$\varrho (x)\leq (\varrho (z))$
and
 $f(\varrho (z))=g(z)\in \mathfrak {d}$
. Moreover, since
$f(\varrho (z))=g(z)\in \mathfrak {d}$
. Moreover, since
 $\varrho $
is relation reflecting, we have
$\varrho $
is relation reflecting, we have
 $R xz$
, showing g satisfies the BDC
$R xz$
, showing g satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}^\Uparrow $
. Similarly, g satisfies the BCD
$\mathfrak {D}^\Uparrow $
. Similarly, g satisfies the BCD
 $^\Downarrow $
for
$^\Downarrow $
for
 $\mathfrak {D}^\Downarrow $
. Consequently,
$\mathfrak {D}^\Downarrow $
. Consequently,
 $\mathfrak {X}\not \models \mu (\sigma \mathfrak {F}, {\mathfrak {D}})$
.
$\mathfrak {X}\not \models \mu (\sigma \mathfrak {F}, {\mathfrak {D}})$
.
 $(\Leftarrow )$
Suppose
$(\Leftarrow )$
Suppose
 $\mathfrak {X}\not \models \mu (\sigma \mathfrak {F}, {\mathfrak {D}})$
. Then there is a stable map
$\mathfrak {X}\not \models \mu (\sigma \mathfrak {F}, {\mathfrak {D}})$
. Then there is a stable map
 $g:\mathfrak {X}\to \sigma \mathfrak {F}$
satisfying the BDC for
$g:\mathfrak {X}\to \sigma \mathfrak {F}$
satisfying the BDC for
 $\mathfrak {D}$
. We construct a map
$\mathfrak {D}$
. We construct a map
 $f:\rho \mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
$f:\rho \mathfrak {X}\to \mathfrak {F}$
satisfying the BDC for
 $\mathfrak {D}$
. To this end, let
$\mathfrak {D}$
. To this end, let
 $$\begin{align*}f(\varrho(x)):=g(x).\end{align*}$$
$$\begin{align*}f(\varrho(x)):=g(x).\end{align*}$$
Note that f is well defined. For if x and y belong to the same cluster, we must have both
 $Rf(x)f(y)$
and
$Rf(x)f(y)$
and
 $Rf(y)f(y)$
. But
$Rf(y)f(y)$
. But
 $\mathfrak {F}$
lacks proper clusters, showing
$\mathfrak {F}$
lacks proper clusters, showing
 $f(x)=f(y)$
. Moreover, f is relation preserving and continuous, hence a stable map. It is relation preserving because
$f(x)=f(y)$
. Moreover, f is relation preserving and continuous, hence a stable map. It is relation preserving because
 $\varrho $
is relation reflecting and g is relation preserving. To see that it is continuous, observe that
$\varrho $
is relation reflecting and g is relation preserving. To see that it is continuous, observe that
 $g^{-1}(U)$
never cuts clusters for any
$g^{-1}(U)$
never cuts clusters for any
 $U\subseteq F$
, then apply Proposition 3.2.
$U\subseteq F$
, then apply Proposition 3.2.
We check that f satisfies the BDC for
 $\mathfrak {D}$
. Let
$\mathfrak {D}$
. Let
 $\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and
$\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and
 $\varrho (x)\in \rho \mathfrak {X}$
. Suppose there is
$\varrho (x)\in \rho \mathfrak {X}$
. Suppose there is
 $y\in \mathfrak {d}$
such that
$y\in \mathfrak {d}$
such that
 $Rf(\varrho (x))y$
. Since g satisfies the BDC
$Rf(\varrho (x))y$
. Since g satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {d}$
, there must be
$\mathfrak {d}$
, there must be
 $z\in X$
such that
$z\in X$
such that
 $Rxz$
and
$Rxz$
and
 $g(z)=f(\varrho (z))\in \mathfrak {d}$
. Since
$g(z)=f(\varrho (z))\in \mathfrak {d}$
. Since
 $\varrho $
is relation preserving,
$\varrho $
is relation preserving,
 $\varrho (x)\leq \varrho (y)$
, showing f satisfies the BCD
$\varrho (x)\leq \varrho (y)$
, showing f satisfies the BCD
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}^\Uparrow $
. Similarly, f satisfies the BCD
$\mathfrak {D}^\Uparrow $
. Similarly, f satisfies the BCD
 $^\Downarrow $
for
$^\Downarrow $
for
 $\mathfrak {D}^\Downarrow $
. Consequently,
$\mathfrak {D}^\Downarrow $
. Consequently,
 $\rho \mathfrak {X}\not \models \eta (\mathfrak {F}, {\mathfrak {D}})$
, which by Lemma 3.4 implies
$\rho \mathfrak {X}\not \models \eta (\mathfrak {F}, {\mathfrak {D}})$
, which by Lemma 3.4 implies
 $\mathfrak {X}\not \models T(\eta (\mathfrak {F}, {\mathfrak {D}}))$
.
$\mathfrak {X}\not \models T(\eta (\mathfrak {F}, {\mathfrak {D}}))$
.
We now show that every rule
 $\mu (\mathfrak {F}, {\mathfrak {D}})$
where
$\mu (\mathfrak {F}, {\mathfrak {D}})$
where
 $\mathfrak {F}$
is a
$\mathfrak {F}$
is a
 $\mathtt {Grz(.t)}$
-space may be equivalently rewritten as a finite conjunction of modalized stable canonical rules. First, some preliminary definitions. Let
$\mathtt {Grz(.t)}$
-space may be equivalently rewritten as a finite conjunction of modalized stable canonical rules. First, some preliminary definitions. Let
 $\mathfrak {X}$
be a finite
$\mathfrak {X}$
be a finite
 $\mathtt {Grz}$
-space. If
$\mathtt {Grz}$
-space. If
 $U\subseteq X$
, let
$U\subseteq X$
, let
 $\mathit {pas}(U)$
be the set of points that are passive in U. The chunks of a set
$\mathit {pas}(U)$
be the set of points that are passive in U. The chunks of a set
 $U\subseteq X$
are defined recursively as follows. We put
$U\subseteq X$
are defined recursively as follows. We put
 $\mathit {ch}_1(U):=\mathit {pas}(U)$
. Assuming
$\mathit {ch}_1(U):=\mathit {pas}(U)$
. Assuming
 $\mathit {ch}_i(U)$
has been defined, we put
$\mathit {ch}_i(U)$
has been defined, we put
 $$\begin{align*}\mathit{ch}_{i+1}(U):=\mathit{pas}\left(U\smallsetminus (\mathit{ch}_1(U)\cup\cdots\cup \mathit{ch}_i(U))\right)\end{align*}$$
$$\begin{align*}\mathit{ch}_{i+1}(U):=\mathit{pas}\left(U\smallsetminus (\mathit{ch}_1(U)\cup\cdots\cup \mathit{ch}_i(U))\right)\end{align*}$$
whenever the right-hand side is non-empty; we leave
 $\mathit {ch}_{i+1}(U)$
undefined otherwise. Since
$\mathit {ch}_{i+1}(U)$
undefined otherwise. Since
 $\mathfrak {X}$
is finite, every
$\mathfrak {X}$
is finite, every
 $U\subseteq {X}$
only has finitely many chunks: we let the chunk height of U be the number of chunks it has. Moreover, observe that
$U\subseteq {X}$
only has finitely many chunks: we let the chunk height of U be the number of chunks it has. Moreover, observe that
 $\mathit {ch}_{i}(U)=\mathit {pas}(\mathit {ch}_{i}(U))$
, for each i less than or equal to the chunk height of U.
$\mathit {ch}_{i}(U)=\mathit {pas}(\mathit {ch}_{i}(U))$
, for each i less than or equal to the chunk height of U.
Lemma 6.4. Let
 $\mu (\mathfrak {M}, {D})$
be a stable canonical rule with
$\mu (\mathfrak {M}, {D})$
be a stable canonical rule with
 $\mathfrak {M}\in \mathsf {Alg}(\mathtt {Grz(.t)})$
. Then there is a finite set
$\mathfrak {M}\in \mathsf {Alg}(\mathtt {Grz(.t)})$
. Then there is a finite set
 $\Phi $
of modalized stable canonical rules, such that an
$\Phi $
of modalized stable canonical rules, such that an
 $\mathtt {S4(.t)}$
-algebra
$\mathtt {S4(.t)}$
-algebra
 $\mathfrak {N}$
refutes
$\mathfrak {N}$
refutes
 $\mu (\mathfrak {M}, {D})$
iff it refutes some
$\mu (\mathfrak {M}, {D})$
iff it refutes some
 $\mu (\sigma \mathfrak {H}, {E})\in \Phi $
.
$\mu (\sigma \mathfrak {H}, {E})\in \Phi $
.
Proof. We prove the dual statement. To keep things simple, we only show the case of modal spaces; the case of tense spaces is an adaptation of the same argument.
Let
 $\mathfrak {F}$
be the dual of
$\mathfrak {F}$
be the dual of
 $\mathfrak {M}$
. Observe that there are, up to isomorphism, only finitely many pairs
$\mathfrak {M}$
. Observe that there are, up to isomorphism, only finitely many pairs
 $(\mathfrak {G}, \mathfrak {E})$
satisfying the following conditions:
$(\mathfrak {G}, \mathfrak {E})$
satisfying the following conditions:
-
(1)
$\mathfrak {G}$
is a finite
$\mathtt {Grz}$
-space whose cardinality is at most
$|F|\cdot 2^k$
, where k is the number of all chunks of any
$\mathfrak {d}\in \mathfrak {D}$
; -
(2)
$\mathfrak {E}=\{g^{-1}(\mathit {ch}_i(\mathfrak {d})):\mathfrak {d}\in \mathfrak {D}\text { and } i \text { at most the chunk height of } \mathfrak {d}\}$
, where
$g:\mathfrak {G}\to \mathfrak {F}$
is a stable surjection satisfying the BDC for
$\mathfrak {D}$
.







We let
 $\Phi $
be the set of all rules
$\Phi $
be the set of all rules
 $\mu (\mathfrak {G}, {\mathfrak {E}})$
for all such pairs
$\mu (\mathfrak {G}, {\mathfrak {E}})$
for all such pairs
 $(\mathfrak {G}, \mathfrak {E})$
.
$(\mathfrak {G}, \mathfrak {E})$
.
Note that each rule
 $\mu (\mathfrak {G}, {\mathfrak {E}})$
is modalized. By definition,
$\mu (\mathfrak {G}, {\mathfrak {E}})$
is modalized. By definition,
 $\mathfrak {G}$
is partially ordered. Moreover, if
$\mathfrak {G}$
is partially ordered. Moreover, if
 $g^{-1}(\mathit {ch}_i(\mathfrak {d}))\in \mathfrak {E}$
, then
$g^{-1}(\mathit {ch}_i(\mathfrak {d}))\in \mathfrak {E}$
, then
Indeed, if ![]() , then there are
, then there are
 $y, z\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
such that
$y, z\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
such that
 $Rzx$
and
$Rzx$
and
 $Rxy$
. Since g is stable, it follows that
$Rxy$
. Since g is stable, it follows that
 $Rg(z)g(x)$
and
$Rg(z)g(x)$
and
 $Rg(x)g(y)$
. But since
$Rg(x)g(y)$
. But since
 $\mathit {ch}_i(\mathfrak {d})=\mathit {pas}(\mathit {ch}_i(\mathfrak {d}))$
, we must have
$\mathit {ch}_i(\mathfrak {d})=\mathit {pas}(\mathit {ch}_i(\mathfrak {d}))$
, we must have
 $g(x)\in \mathit {ch}_i(\mathfrak {d})$
, else one could leave and re-enter
$g(x)\in \mathit {ch}_i(\mathfrak {d})$
, else one could leave and re-enter
 $\mathit {ch}_i(\mathfrak {d})$
. Thus, by Lemma 6.2, each
$\mathit {ch}_i(\mathfrak {d})$
. Thus, by Lemma 6.2, each
 $\mu (\mathfrak {G}, {\mathfrak {E}})$
is modalized.
$\mu (\mathfrak {G}, {\mathfrak {E}})$
is modalized.
(
 $\Rightarrow $
) Let
$\Rightarrow $
) Let
 $\mathfrak {X}$
be an
$\mathfrak {X}$
be an
 $\mathtt {S4}$
-space and suppose
$\mathtt {S4}$
-space and suppose
 $\mathfrak {X}\not \models \mu (\mathfrak {G}, {\mathfrak {E}})$
for some
$\mathfrak {X}\not \models \mu (\mathfrak {G}, {\mathfrak {E}})$
for some
 $\mu (\mathfrak {G}, {\mathfrak {E}})\in \Phi $
. Then there is a stable surjection
$\mu (\mathfrak {G}, {\mathfrak {E}})\in \Phi $
. Then there is a stable surjection
 $f:\mathfrak {X}\to \mathfrak {G}$
satisfying the BDC for
$f:\mathfrak {X}\to \mathfrak {G}$
satisfying the BDC for
 $\mathfrak {E}$
. Let
$\mathfrak {E}$
. Let
 $g:\mathfrak {G}\to \mathfrak {F}$
be the stable surjection satisfying the BDC for
$g:\mathfrak {G}\to \mathfrak {F}$
be the stable surjection satisfying the BDC for
 $\mathfrak {D}$
given by Item 2 from the definition of
$\mathfrak {D}$
given by Item 2 from the definition of
 $\Phi $
. By definition,
$\Phi $
. By definition,
 $\mathfrak {E}=\{g^{-1}(\mathit {ch}_i(\mathfrak {d})):\mathfrak {d}\in \mathfrak {D}, i\text { at most the chunk height of} \mathfrak {d}\}$
.
$\mathfrak {E}=\{g^{-1}(\mathit {ch}_i(\mathfrak {d})):\mathfrak {d}\in \mathfrak {D}, i\text { at most the chunk height of} \mathfrak {d}\}$
.
Consider the map
 $g\circ f:\mathfrak {X}\to \mathfrak {F}$
. We claim that
$g\circ f:\mathfrak {X}\to \mathfrak {F}$
. We claim that
 $g\circ f$
is a stable surjection that satisfies the BDC for
$g\circ f$
is a stable surjection that satisfies the BDC for
 $\mathfrak {D}$
. That
$\mathfrak {D}$
. That
 $g\circ f$
is surjective follows because both
$g\circ f$
is surjective follows because both
 $f, g$
are. Likewise,
$f, g$
are. Likewise,
 $g\circ f$
is stable because both
$g\circ f$
is stable because both
 $f, g$
are. To check the BDC, take any
$f, g$
are. To check the BDC, take any
 $x\in X$
and suppose
$x\in X$
and suppose ![]() for some
for some
 $\mathfrak {d}\in \mathfrak {D}$
. Since g satisfies the BDC for
$\mathfrak {d}\in \mathfrak {D}$
. Since g satisfies the BDC for
 $\mathfrak {D}$
, there must be some
$\mathfrak {D}$
, there must be some
 $f(y)\in \mathfrak {G}$
such that
$f(y)\in \mathfrak {G}$
such that
 $Rf(x)f(y)$
and
$Rf(x)f(y)$
and
 $g(f(y))\in \mathfrak {d}$
. Let
$g(f(y))\in \mathfrak {d}$
. Let
 $\mathit {ch}_i(\mathfrak {d})$
be the unique chunk of
$\mathit {ch}_i(\mathfrak {d})$
be the unique chunk of
 $\mathfrak {d}$
such that
$\mathfrak {d}$
such that
 $g(f(y))\in \mathit {ch}_i(\mathfrak {d})$
. Then
$g(f(y))\in \mathit {ch}_i(\mathfrak {d})$
. Then
 $f(y)\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
. By definition,
$f(y)\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
. By definition,
 $g^{-1}(\mathit {ch}_i(\mathfrak {d}))\in \mathfrak {E}$
. Since f satisfies the BDC for
$g^{-1}(\mathit {ch}_i(\mathfrak {d}))\in \mathfrak {E}$
. Since f satisfies the BDC for
 $\mathfrak {E}$
, there must be some
$\mathfrak {E}$
, there must be some
 $z\in X$
such that
$z\in X$
such that
 $Rxz$
and
$Rxz$
and
 $f(z)\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
. In other words,
$f(z)\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
. In other words,
 $g(f(z))\in \mathit {ch}_i(\mathfrak {d})\subseteq \mathfrak {d}$
. This shows that, indeed,
$g(f(z))\in \mathit {ch}_i(\mathfrak {d})\subseteq \mathfrak {d}$
. This shows that, indeed,
 $g\circ f$
satisfies the BDC for
$g\circ f$
satisfies the BDC for
 $\mathfrak {D}$
. We may then conclude
$\mathfrak {D}$
. We may then conclude
 $\mathfrak {X}\not \models \mu (\mathfrak {F}, {\mathfrak {D}})$
.
$\mathfrak {X}\not \models \mu (\mathfrak {F}, {\mathfrak {D}})$
.
(
 $\Leftarrow $
) Let
$\Leftarrow $
) Let
 $\mathfrak {X}$
be an
$\mathfrak {X}$
be an
 $\mathtt {S4}$
-space. Assume
$\mathtt {S4}$
-space. Assume
 $\mathfrak {X}\not \models \mu (\mathfrak {F}, {\mathfrak {D}})$
. Then there is a stable surjection
$\mathfrak {X}\not \models \mu (\mathfrak {F}, {\mathfrak {D}})$
. Then there is a stable surjection
 $f:\mathfrak {X}\to \mathfrak {F}$
that satisfies the BDC for
$f:\mathfrak {X}\to \mathfrak {F}$
that satisfies the BDC for
 $\mathfrak {D}$
. We define an equivalence relation on
$\mathfrak {D}$
. We define an equivalence relation on
 $\mathfrak {X}$
as follows. We put
$\mathfrak {X}$
as follows. We put
 $x\sim y$
when both
$x\sim y$
when both
-
(i)
$f(x)=f(y)$
, and -
(ii) for every
$\mathit {ch}_i(\mathfrak {d})$
with
$\mathfrak {d}\in \mathfrak {D}$
, we have



In other words,
 $x\sim y$
holds when x and y have the same image under f, and “see” the f-preimages of exactly the same chunks of domains from
$x\sim y$
holds when x and y have the same image under f, and “see” the f-preimages of exactly the same chunks of domains from
 $\mathfrak {D}$
. We write
$\mathfrak {D}$
. We write
 $[x]$
for the equivalence class of x under
$[x]$
for the equivalence class of x under
 $\sim $
. Next, we define a relation on equivalence classes of
$\sim $
. Next, we define a relation on equivalence classes of
 $\sim $
. We put
$\sim $
. We put
 $R[x][y]$
when both
$R[x][y]$
when both
-
(iii)
$Rf(x)f(y)$
, and -
(iv) for every
$\mathit {ch}_i(\mathfrak {d})$
with
$\mathfrak {d}\in \mathfrak {D}$
, we have



It should be clear that R is well defined. We let
 $\mathfrak {G}$
denote the modal space that results from equipping the quotient of
$\mathfrak {G}$
denote the modal space that results from equipping the quotient of
 $\mathfrak {X}$
under
$\mathfrak {X}$
under
 $\sim $
with R.
$\sim $
with R.
Observe that, by definition,
 $\sim $
refines the partition whose cells are points with the same f-images. The cardinality of that partition is clearly
$\sim $
refines the partition whose cells are points with the same f-images. The cardinality of that partition is clearly
 $|F|$
. But
$|F|$
. But
 $\sim $
splits each cell of this partition into at most
$\sim $
splits each cell of this partition into at most
 $2^k$
sub-cells, where k is the total number of chunks of any
$2^k$
sub-cells, where k is the total number of chunks of any
 $\mathfrak {d}\in \mathfrak {D}$
. Consequently, the cardinality of
$\mathfrak {d}\in \mathfrak {D}$
. Consequently, the cardinality of
 $\mathfrak {G}$
is at most
$\mathfrak {G}$
is at most
 $|F|\cdot 2^k$
, as required by the definition of
$|F|\cdot 2^k$
, as required by the definition of
 $\Phi $
.
$\Phi $
.
Furthermore, we claim that
 $\mathfrak {G}$
is a
$\mathfrak {G}$
is a
 $\mathtt {Grz}$
-space. Since
$\mathtt {Grz}$
-space. Since
 $\mathfrak {G}$
is finite, we need only check that its relation R is a partial order. R is clearly reflexive and transitive. For antisymmetry, assume
$\mathfrak {G}$
is finite, we need only check that its relation R is a partial order. R is clearly reflexive and transitive. For antisymmetry, assume
 $R[x][y]$
and
$R[x][y]$
and
 $R[y][x]$
. By (6), we have
$R[y][x]$
. By (6), we have
 $Rf(x)f(y)$
and
$Rf(x)f(y)$
and
 $Rf(y)f(x)$
, which implies
$Rf(y)f(x)$
, which implies
 $f(x)=f(y)$
because
$f(x)=f(y)$
because
 $\mathfrak {F}$
is partially ordered. Moreover, by (6), we have that
$\mathfrak {F}$
is partially ordered. Moreover, by (6), we have that ![]() holds exactly when
holds exactly when ![]() does, for each
does, for each
 $\mathit {ch}_i(\mathfrak {d})$
with
$\mathit {ch}_i(\mathfrak {d})$
with
 $\mathfrak {d}\in \mathfrak {D}$
. But then
$\mathfrak {d}\in \mathfrak {D}$
. But then
 $[x],[y]$
meet conditions (i) and (ii), showing
$[x],[y]$
meet conditions (i) and (ii), showing
 $[x]=[y]$
.
$[x]=[y]$
.
Let us define a map
 $g: \mathfrak {G}\to \mathfrak {F}$
by putting
$g: \mathfrak {G}\to \mathfrak {F}$
by putting
 $g[x]=f(x)$
. Then g is a stable surjection satisfying the BDC for
$g[x]=f(x)$
. Then g is a stable surjection satisfying the BDC for
 $\mathfrak {D}$
. Indeed, g is surjective because f and the quotient map both are. Moreover, the way we defined the relation of
$\mathfrak {D}$
. Indeed, g is surjective because f and the quotient map both are. Moreover, the way we defined the relation of
 $\mathfrak {Y}$
immediately implies that g is relation preserving, and continuity follows from the finiteness of
$\mathfrak {Y}$
immediately implies that g is relation preserving, and continuity follows from the finiteness of
 $\mathfrak {G}$
. For the BDC, suppose
$\mathfrak {G}$
. For the BDC, suppose ![]() for some
for some
 $\mathfrak {d}\in \mathfrak {D}$
. Then
$\mathfrak {d}\in \mathfrak {D}$
. Then ![]() . Since f satisfies the BDC for
. Since f satisfies the BDC for
 $\mathfrak {D}$
, there must be
$\mathfrak {D}$
, there must be
 $y\in X$
with
$y\in X$
with
 $Rxy$
and
$Rxy$
and
 $f(y)=g[y]\in \mathfrak {d}$
. Since
$f(y)=g[y]\in \mathfrak {d}$
. Since
 $Rxy$
implies
$Rxy$
implies
 $R[x][y]$
, this shows that g satisfies the BDC for
$R[x][y]$
, this shows that g satisfies the BDC for
 $\mathfrak {D}$
.
$\mathfrak {D}$
.
Via g, we may then define, in accordance with the definition of
 $\Phi $
,
$\Phi $
,
 $$\begin{align*}\mathfrak{E}=\{g^{-1}(\mathit{ch}_i(\mathfrak{d})):\mathfrak{d}\in \mathfrak{D}, i\text{ at most the chunk height of}\ \mathfrak{d}\}.\end{align*}$$
$$\begin{align*}\mathfrak{E}=\{g^{-1}(\mathit{ch}_i(\mathfrak{d})):\mathfrak{d}\in \mathfrak{D}, i\text{ at most the chunk height of}\ \mathfrak{d}\}.\end{align*}$$
It follows that
 $\mu (\mathfrak {G}, {\mathfrak {E}})\in \Phi $
.
$\mu (\mathfrak {G}, {\mathfrak {E}})\in \Phi $
.
We show that
 $\mathfrak {X}\not \models \mu (\mathfrak {G}, {\mathfrak {E}})$
, by showing that the quotient map
$\mathfrak {X}\not \models \mu (\mathfrak {G}, {\mathfrak {E}})$
, by showing that the quotient map
 $x\mapsto [x]$
is a stable surjection satisfying the BDC for
$x\mapsto [x]$
is a stable surjection satisfying the BDC for
 $\mathfrak {E}$
. The quotient map is clearly relation preserving and surjective. Moreover, it is continuous, because each equivalence class under
$\mathfrak {E}$
. The quotient map is clearly relation preserving and surjective. Moreover, it is continuous, because each equivalence class under
 $\sim $
is definable as a finite intersection of clopens. Thus, it is a stable surjection. Let us check the BDC. Let
$\sim $
is definable as a finite intersection of clopens. Thus, it is a stable surjection. Let us check the BDC. Let
 $x\in X$
and
$x\in X$
and
 $g^{-1}(\mathit {ch}_i(\mathfrak {d}))\in \mathfrak {E}$
, and suppose
$g^{-1}(\mathit {ch}_i(\mathfrak {d}))\in \mathfrak {E}$
, and suppose ![]() . This means that there is
. This means that there is
 $[y]\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
such that
$[y]\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
such that
 $R[x][y]$
. By the definition of g, this is to say
$R[x][y]$
. By the definition of g, this is to say
 $y\in f^{-1}(\mathit {ch}_i(\mathfrak {d}))$
. A fortiori,
$y\in f^{-1}(\mathit {ch}_i(\mathfrak {d}))$
. A fortiori, ![]() . By condition (iv) in the definition of R, we may then infer that
. By condition (iv) in the definition of R, we may then infer that ![]() . In other words, there must be
. In other words, there must be
 $z\in X$
with
$z\in X$
with
 $Rxz$
and
$Rxz$
and
 $f(z)\in \mathit {ch}_i(\mathfrak {d})$
. But
$f(z)\in \mathit {ch}_i(\mathfrak {d})$
. But
 $Rxz$
implies
$Rxz$
implies
 $R[x][z]$
, and
$R[x][z]$
, and
 $f(z)\in \mathit {ch}_i(\mathfrak {d})$
is equivalent to
$f(z)\in \mathit {ch}_i(\mathfrak {d})$
is equivalent to
 $[z]\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
, as desired.
$[z]\in g^{-1}(\mathit {ch}_i(\mathfrak {d}))$
, as desired.
Remark 6.5. It is a straightforward consequence of the Blok–Esakia theorem and Lemma 6.3 that every modal (resp., tense) rule is equivalent over
 $\mathtt {Grz(.t)}$
to a set of modalized stable canonical rules. Indeed, given a modal rule
$\mathtt {Grz(.t)}$
to a set of modalized stable canonical rules. Indeed, given a modal rule
 $\Gamma /\Delta $
, the modal rule system
$\Gamma /\Delta $
, the modal rule system
 $\mathtt {Grz(.t)}\oplus \Gamma /\Delta $
must be of the form
$\mathtt {Grz(.t)}\oplus \Gamma /\Delta $
must be of the form
 $\sigma \mathtt {L}$
, for some (b)si rule system
$\sigma \mathtt {L}$
, for some (b)si rule system
 $\mathtt {L}$
. We know that
$\mathtt {L}$
. We know that
 $\mathtt {L}$
must be axiomatizable, over
$\mathtt {L}$
must be axiomatizable, over
 $\mathtt {(bi)IPC}$
, by a set of (b)si stable canonical rules
$\mathtt {(bi)IPC}$
, by a set of (b)si stable canonical rules
 $\Psi $
. But then
$\Psi $
. But then
 $\sigma \mathtt {L}=\mathtt {Grz(.t)}\oplus \{\mu _\circ (\mathfrak {H}, {D}): \eta (\mathfrak {H}, {D})\in \Psi \}$
by Lemma 6.3, which is to say that
$\sigma \mathtt {L}=\mathtt {Grz(.t)}\oplus \{\mu _\circ (\mathfrak {H}, {D}): \eta (\mathfrak {H}, {D})\in \Psi \}$
by Lemma 6.3, which is to say that
 $\Gamma /\Delta $
is equivalent, over
$\Gamma /\Delta $
is equivalent, over
 $\mathtt {Grz(.t)}$
, to
$\mathtt {Grz(.t)}$
, to
 $\{\mu _\circ (\mathfrak {H}, {D}): \eta (\mathfrak {H}, {D})\in \Psi \}$
. Furthermore, one direction of this equivalence remains true over
$\{\mu _\circ (\mathfrak {H}, {D}): \eta (\mathfrak {H}, {D})\in \Psi \}$
. Furthermore, one direction of this equivalence remains true over
 $\mathtt {S4(.t)}$
. Indeed,
$\mathtt {S4(.t)}$
. Indeed,
 $\rho (\mathtt {S4(.t)}\oplus \Gamma /\Delta )=\rho (\mathtt {Grz(.t)}\oplus \Gamma /\Delta )$
, so by Lemma 6.3, we have
$\rho (\mathtt {S4(.t)}\oplus \Gamma /\Delta )=\rho (\mathtt {Grz(.t)}\oplus \Gamma /\Delta )$
, so by Lemma 6.3, we have
 $\tau \rho (\mathtt {S4(.t)}\oplus \Gamma /\Delta )=\mathtt {S4(.t)}\oplus \{\mu _\circ (\mathfrak {H}, {D}): \eta (\mathfrak {H}, {D})\in \Psi \}\subseteq \mathtt {S4(.t)}\oplus \Gamma /\Delta $
. This is to say
$\tau \rho (\mathtt {S4(.t)}\oplus \Gamma /\Delta )=\mathtt {S4(.t)}\oplus \{\mu _\circ (\mathfrak {H}, {D}): \eta (\mathfrak {H}, {D})\in \Psi \}\subseteq \mathtt {S4(.t)}\oplus \Gamma /\Delta $
. This is to say
 $\Gamma /\Delta $
implies each
$\Gamma /\Delta $
implies each
 $\mu _\circ (\mathfrak {H}, {D})$
over
$\mu _\circ (\mathfrak {H}, {D})$
over
 $\mathtt {S4(.t)}$
.
$\mathtt {S4(.t)}$
.
These observations do not imply Lemma 6.4: for all we have said,
 $\Psi $
might be infinite, and the above reasoning does not establish that both directions of the equivalence go through when restricting attention to rules based on
$\Psi $
might be infinite, and the above reasoning does not establish that both directions of the equivalence go through when restricting attention to rules based on
 $\mathtt {Grz(.t)}$
-spaces. That being said, the observations in this remark would be enough to carry out our proof of the Dummett–Lemmon conjecture. This is the strategy followed by [Reference Liao32] in a generalization of our technique. We chose to rely on Lemma 6.4 because we find the construction it employs independently interesting. A similar construction can be used to establish that
$\mathtt {Grz(.t)}$
-spaces. That being said, the observations in this remark would be enough to carry out our proof of the Dummett–Lemmon conjecture. This is the strategy followed by [Reference Liao32] in a generalization of our technique. We chose to rely on Lemma 6.4 because we find the construction it employs independently interesting. A similar construction can be used to establish that
 $\mathtt {Grz(.t)}$
admits filtration, albeit in a somewhat non-standard sense (see [Reference Cleani15, Theorem 2.74]).
$\mathtt {Grz(.t)}$
admits filtration, albeit in a somewhat non-standard sense (see [Reference Cleani15, Theorem 2.74]).
The last notion we need to introduce is that of a collapsed stable canonical rule.
Definition 6.6. Let
 $\mu (\mathfrak {M}, {D})$
be a stable canonical rule with
$\mu (\mathfrak {M}, {D})$
be a stable canonical rule with
 $\mathfrak {M}\in \mathsf {Alg}(\mathtt {S4(.t)})$
. The collapsed stable canonical rule is defined as the rule
$\mathfrak {M}\in \mathsf {Alg}(\mathtt {S4(.t)})$
. The collapsed stable canonical rule is defined as the rule
 $\mu (\sigma \rho \mathfrak {M}, {\sigma \rho D})$
, where
$\mu (\sigma \rho \mathfrak {M}, {\sigma \rho D})$
, where
 ${\sigma \rho D}:=(\sigma \rho D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {M})}$
and
${\sigma \rho D}:=(\sigma \rho D^\heartsuit )_{\heartsuit \in \mathit {op}(\mathfrak {M})}$
and
 $$\begin{align*}\sigma\rho D^\heartsuit:=\left\{ \bigwedge\{b\in B(O(\mathfrak{M})): a\leq b\} : a\in D^\heartsuit\right\}.\end{align*}$$
$$\begin{align*}\sigma\rho D^\heartsuit:=\left\{ \bigwedge\{b\in B(O(\mathfrak{M})): a\leq b\} : a\in D^\heartsuit\right\}.\end{align*}$$
To understand the intuition behind collapsed rules, it is helpful to characterize them dually. Observe that the mapping on
 $\mathfrak {M}$
given by
$\mathfrak {M}$
given by
 $$\begin{align*}a\mapsto \bigwedge\{b\in B(O(\mathfrak{M})): a\leq b\}\end{align*}$$
$$\begin{align*}a\mapsto \bigwedge\{b\in B(O(\mathfrak{M})): a\leq b\}\end{align*}$$
is the algebraic dual of the cluster collapse map on
 $\mathfrak {M}_*$
, in the sense that
$\mathfrak {M}_*$
, in the sense that
 $$\begin{align*}\beta \left(\bigwedge\{b\in B(O(\mathfrak{M})): a\leq b\}\right)= \varrho[\beta (a)].\end{align*}$$
$$\begin{align*}\beta \left(\bigwedge\{b\in B(O(\mathfrak{M})): a\leq b\}\right)= \varrho[\beta (a)].\end{align*}$$
Consequently, the collapsed rule
 $\mu (\sigma \rho \mathfrak {M}, {\sigma \rho D})$
is identical to the rule
$\mu (\sigma \rho \mathfrak {M}, {\sigma \rho D})$
is identical to the rule
 $\mu (\sigma \rho \mathfrak {\mathfrak {M}_*}, {\sigma \rho \mathfrak {D}})$
, where
$\mu (\sigma \rho \mathfrak {\mathfrak {M}_*}, {\sigma \rho \mathfrak {D}})$
, where
 $\sigma \rho \mathfrak {D}$
is obtained by setting
$\sigma \rho \mathfrak {D}$
is obtained by setting
 $$ \begin{align*} \sigma\rho \mathfrak{D}^\heartsuit&:=\{\varrho [\mathfrak{d}]: \mathfrak{d}\in \mathfrak{D}^\heartsuit\}\qquad &\heartsuit\in \{\Uparrow, \Downarrow\}\\ {\sigma\rho\mathfrak{D}}&:=(\sigma\rho \mathfrak{D}^\heartsuit)_{\mathfrak{D}^\heartsuit\in\mathfrak{ D}}. & \end{align*} $$
$$ \begin{align*} \sigma\rho \mathfrak{D}^\heartsuit&:=\{\varrho [\mathfrak{d}]: \mathfrak{d}\in \mathfrak{D}^\heartsuit\}\qquad &\heartsuit\in \{\Uparrow, \Downarrow\}\\ {\sigma\rho\mathfrak{D}}&:=(\sigma\rho \mathfrak{D}^\heartsuit)_{\mathfrak{D}^\heartsuit\in\mathfrak{ D}}. & \end{align*} $$
In other words,
 $\mu (\sigma \rho {\mathfrak {M}_*}, {\sigma \rho \mathfrak {D}})$
is obtained from
$\mu (\sigma \rho {\mathfrak {M}_*}, {\sigma \rho \mathfrak {D}})$
is obtained from
 $\mu (\mathfrak {F}, {\mathfrak {D}})$
by collapsing all clusters in
$\mu (\mathfrak {F}, {\mathfrak {D}})$
by collapsing all clusters in
 $\mathfrak {F}$
and in the sets of domains
$\mathfrak {F}$
and in the sets of domains
 $\mathfrak {D}^\heartsuit $
as well.
$\mathfrak {D}^\heartsuit $
as well.
Collapsed rules obey the following refutation condition on spaces and Kripke frames.
Lemma 6.7 (Rule Collapse Lemma).
For all
 $\mathfrak {X}\in \mathsf {Spa}(\mathtt {S4(.t)})$
and any stable canonical rule
$\mathfrak {X}\in \mathsf {Spa}(\mathtt {S4(.t)})$
and any stable canonical rule
 $\mu (\mathfrak {F}, {\mathfrak {D}})$
such that
$\mu (\mathfrak {F}, {\mathfrak {D}})$
such that
 $\mathfrak {F}\in \mathsf {Spa}(\mathtt {S4(.t)})$
, if
$\mathfrak {F}\in \mathsf {Spa}(\mathtt {S4(.t)})$
, if
 $\mathfrak {X}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
, then
$\mathfrak {X}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
, then
 $\sigma \rho \mathfrak {X}\nvDash \mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
. Moreover, the same holds if
$\sigma \rho \mathfrak {X}\nvDash \mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
. Moreover, the same holds if
 $\mathfrak {X}$
is a reflexive and transitive Kripke frame.
$\mathfrak {X}$
is a reflexive and transitive Kripke frame.
Proof. Assume
 $\mathfrak {X}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
. Then there is a stable map
$\mathfrak {X}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
. Then there is a stable map
 $f:\mathfrak {X}\to \mathfrak {F}$
that satisfies the BDC for
$f:\mathfrak {X}\to \mathfrak {F}$
that satisfies the BDC for
 $\mathfrak { D}$
. Consider the map
$\mathfrak { D}$
. Consider the map
 $g:\sigma \rho \mathfrak {X}\to \sigma \rho \mathfrak {F}$
given by
$g:\sigma \rho \mathfrak {X}\to \sigma \rho \mathfrak {F}$
given by
 $$\begin{align*}g(\varrho(x))=\varrho(f(x)).\end{align*}$$
$$\begin{align*}g(\varrho(x))=\varrho(f(x)).\end{align*}$$
Now
 $R\varrho (x)\varrho (y)$
implies
$R\varrho (x)\varrho (y)$
implies
 $Rxy$
, and since f is relation preserving also
$Rxy$
, and since f is relation preserving also
 $Rf(x)f(y)$
, which implies
$Rf(x)f(y)$
, which implies
 $R\varrho (f(x)) \varrho (f(y))$
. So g is relation preserving. Furthermore, again because f is relation preserving we have that for any
$R\varrho (f(x)) \varrho (f(y))$
. So g is relation preserving. Furthermore, again because f is relation preserving we have that for any
 $U\subseteq F$
, the set
$U\subseteq F$
, the set
 $f^{-1}(U)$
does not cut clusters, whence
$f^{-1}(U)$
does not cut clusters, whence
 $g^{-1}(U)=\varrho [f^{-1}(\varrho ^{-1}(U))]$
is clopen for any
$g^{-1}(U)=\varrho [f^{-1}(\varrho ^{-1}(U))]$
is clopen for any
 $U\subseteq \varrho [F]$
, as
$U\subseteq \varrho [F]$
, as
 $\rho \mathfrak {X}$
has the quotient topology. Thus, g is continuous.
$\rho \mathfrak {X}$
has the quotient topology. Thus, g is continuous.
Let us check that g satisfies the BDC for
 ${\sigma \rho \mathfrak {D}}$
. Let
${\sigma \rho \mathfrak {D}}$
. Let
 $\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and suppose that
$\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and suppose that
 ${\Uparrow } g(\varrho (x))\cap \varrho [\mathfrak {d}]\neq \varnothing $
. Then there is some
${\Uparrow } g(\varrho (x))\cap \varrho [\mathfrak {d}]\neq \varnothing $
. Then there is some
 $\varrho (y)\in \varrho [F]$
with
$\varrho (y)\in \varrho [F]$
with
 $R\varrho (f(x))\varrho (y)$
and
$R\varrho (f(x))\varrho (y)$
and
 $\varrho (y)\in \varrho [\mathfrak {d}]$
. By construction, wlog, we may assume that
$\varrho (y)\in \varrho [\mathfrak {d}]$
. By construction, wlog, we may assume that
 $y\in \mathfrak {d}$
. As
$y\in \mathfrak {d}$
. As
 $\varrho $
is relation reflecting it follows that
$\varrho $
is relation reflecting it follows that
 $Rf(x) y$
, and so we have that
$Rf(x) y$
, and so we have that
 ${\Uparrow }[ f(x)]\cap \mathfrak {d}\neq \varnothing $
. Since f satisfies the BDC
${\Uparrow }[ f(x)]\cap \mathfrak {d}\neq \varnothing $
. Since f satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}$
we conclude that
$\mathfrak {D}$
we conclude that
 $f[{\Uparrow } x]\cap \mathfrak {d}\neq \varnothing $
. So, there is some
$f[{\Uparrow } x]\cap \mathfrak {d}\neq \varnothing $
. So, there is some
 $z\in X$
with
$z\in X$
with
 $Rxz$
and
$Rxz$
and
 $f(z)\in \mathfrak {d}$
. By definition,
$f(z)\in \mathfrak {d}$
. By definition,
 $\varrho (f(z))\in \varrho [\mathfrak {d}]$
. Hence we have shown that
$\varrho (f(z))\in \varrho [\mathfrak {d}]$
. Hence we have shown that
 $\varrho [f[{\Uparrow }x]]\cap \varrho [\mathfrak {d}]\neq \varnothing $
, and so g indeed satisfies the BDC
$\varrho [f[{\Uparrow }x]]\cap \varrho [\mathfrak {d}]\neq \varnothing $
, and so g indeed satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}^\Uparrow $
. Similarly, g indeed satisfies the BDC
$\mathfrak {D}^\Uparrow $
. Similarly, g indeed satisfies the BDC
 $^\Downarrow $
for
$^\Downarrow $
for
 $\mathfrak {D}^\Downarrow $
. The case where
$\mathfrak {D}^\Downarrow $
. The case where
 $\mathfrak {X}$
is a Kripke frame is analogous.
$\mathfrak {X}$
is a Kripke frame is analogous.
We are now ready to prove the Dummett–Lemmon conjecture for rule systems.
Theorem 6.8 (Dummett–Lemmon conjecture for rule systems).
A (b)si rule system
 $\mathtt {L}$
is Kripke complete iff
$\mathtt {L}$
is Kripke complete iff
 $\tau \mathtt {L}$
is.
$\tau \mathtt {L}$
is.
Proof.
 $(\Rightarrow )$
Let
$(\Rightarrow )$
Let
 $\mathtt {L}$
be Kripke complete. Suppose that
$\mathtt {L}$
be Kripke complete. Suppose that
 $\Gamma /\Delta \notin \tau \mathtt {L}$
. Then there is
$\Gamma /\Delta \notin \tau \mathtt {L}$
. Then there is
 $\mathfrak {X}\in \mathsf {Spa}(\tau \mathtt {L})$
such that
$\mathfrak {X}\in \mathsf {Spa}(\tau \mathtt {L})$
such that
 $\mathfrak {X}\nvDash \Gamma /\Delta $
. By Lemma 4.9, we may assume, wlog, that
$\mathfrak {X}\nvDash \Gamma /\Delta $
. By Lemma 4.9, we may assume, wlog, that
 $\Gamma /\Delta =\mu (\mathfrak {F}, {\mathfrak {D}})$
for
$\Gamma /\Delta =\mu (\mathfrak {F}, {\mathfrak {D}})$
for
 $\mathfrak {F}$
a preorder. By the Rule Collapse Lemma, it follows that
$\mathfrak {F}$
a preorder. By the Rule Collapse Lemma, it follows that
 $\sigma \rho \mathfrak {X}\not \models \mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
. Let
$\sigma \rho \mathfrak {X}\not \models \mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
. Let
 $\Phi $
be the set of modalized stable canonical rules whose conjunction is equivalent, over
$\Phi $
be the set of modalized stable canonical rules whose conjunction is equivalent, over
 $\mathtt {S4(.t)}$
, to
$\mathtt {S4(.t)}$
, to
 $\mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
, given by Lemma 6.4. Then, by Lemma 6.4, there is a modalized stable canonical rule
$\mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
, given by Lemma 6.4. Then, by Lemma 6.4, there is a modalized stable canonical rule
 $\mu (\sigma \mathfrak {G}, {\mathfrak {E}})\in \Phi $
such that
$\mu (\sigma \mathfrak {G}, {\mathfrak {E}})\in \Phi $
such that
 $\sigma \rho \mathfrak {X}\not \models \mu (\sigma \mathfrak {G}, {\mathfrak {E}})$
. By the Rule Translation Lemma, it follows that
$\sigma \rho \mathfrak {X}\not \models \mu (\sigma \mathfrak {G}, {\mathfrak {E}})$
. By the Rule Translation Lemma, it follows that
 $\rho \mathfrak {X}\not \models \eta (\mathfrak {G}, {\mathfrak {E}})$
. By Lemma 5.5 and the fact that
$\rho \mathfrak {X}\not \models \eta (\mathfrak {G}, {\mathfrak {E}})$
. By Lemma 5.5 and the fact that
 $\mathfrak {X}\in \mathsf {Spa}(\tau \mathtt {L})$
it follows that
$\mathfrak {X}\in \mathsf {Spa}(\tau \mathtt {L})$
it follows that
 $\rho \mathfrak {X}\in \mathsf {Spa}(\mathtt {L})$
. Consequently,
$\rho \mathfrak {X}\in \mathsf {Spa}(\mathtt {L})$
. Consequently,
 $\eta (\mathfrak {G}, {\mathfrak {E}})\notin \mathtt {L}$
. Since
$\eta (\mathfrak {G}, {\mathfrak {E}})\notin \mathtt {L}$
. Since
 $\mathtt {L}$
is Kripke complete, there must be a (b)si Kripke frame
$\mathtt {L}$
is Kripke complete, there must be a (b)si Kripke frame
 $\mathfrak {Y}$
such that
$\mathfrak {Y}$
such that
 $\mathfrak {Y}\not \models \eta (\mathfrak {G}, {\mathfrak {E}})$
. Therefore, by the Rule Translation Lemma again,
$\mathfrak {Y}\not \models \eta (\mathfrak {G}, {\mathfrak {E}})$
. Therefore, by the Rule Translation Lemma again,
 $\sigma \mathfrak {Y}\not \models \mu (\sigma \mathfrak {G}, {\mathfrak {E}})$
. Since
$\sigma \mathfrak {Y}\not \models \mu (\sigma \mathfrak {G}, {\mathfrak {E}})$
. Since
 $\sigma \mathfrak {Y}$
is an
$\sigma \mathfrak {Y}$
is an
 $\mathtt {S4}$
-Kripke frame, by Lemma 6.4 and Theorem 2.9, it follows that
$\mathtt {S4}$
-Kripke frame, by Lemma 6.4 and Theorem 2.9, it follows that
 $\sigma \mathfrak {Y}\not \models \mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
. Thus, there is a stable map
$\sigma \mathfrak {Y}\not \models \mu (\sigma \rho \mathfrak {F}, {\sigma \rho \mathfrak {D}})$
. Thus, there is a stable map
 $f:\sigma \mathfrak {Y}\to \sigma \rho \mathfrak {F}$
satisfying the BDC for
$f:\sigma \mathfrak {Y}\to \sigma \rho \mathfrak {F}$
satisfying the BDC for
 $\sigma \rho \mathfrak {D}$
.
$\sigma \rho \mathfrak {D}$
.
The goal now is to construct, from
 $\sigma \mathfrak {Y}$
and
$\sigma \mathfrak {Y}$
and
 $f,$
respectively, a Kripke frame
$f,$
respectively, a Kripke frame
 $\mathfrak {Z}$
for
$\mathfrak {Z}$
for
 $\tau \mathtt {L}$
and a stable map
$\tau \mathtt {L}$
and a stable map
 $g:\mathfrak {Z}\to \mathfrak {F}$
satisfying the BDC for
$g:\mathfrak {Z}\to \mathfrak {F}$
satisfying the BDC for
 $\mathfrak {D}$
. We do so as follows. For each
$\mathfrak {D}$
. We do so as follows. For each
 $x\in \varrho [F]$
, enumerate
$x\in \varrho [F]$
, enumerate
 $\varrho ^{-1}(x):=\{x_1, \ldots , x_{k_x}\}$
. Working in
$\varrho ^{-1}(x):=\{x_1, \ldots , x_{k_x}\}$
. Working in
 $\sigma \mathfrak {Y}$
, for each
$\sigma \mathfrak {Y}$
, for each
 $y\in f^{-1}(x)$
, replace y with a
$y\in f^{-1}(x)$
, replace y with a
 $k_x$
-cluster
$k_x$
-cluster
 $y_1, \ldots , y_{k_x}$
, and extend the relation R clusterwise:
$y_1, \ldots , y_{k_x}$
, and extend the relation R clusterwise:
 $Ry_iz_j$
iff either
$Ry_iz_j$
iff either
 $y=z$
or
$y=z$
or
 $Ryz$
. This constitutes our Kripke frame
$Ryz$
. This constitutes our Kripke frame
 $\mathfrak {Z}$
. Note that
$\mathfrak {Z}$
. Note that
 $\mathfrak {Z}\models \tau \mathtt {L}$
, because
$\mathfrak {Z}\models \tau \mathtt {L}$
, because
 $\rho \mathfrak {Z}\cong \mathfrak {Y}$
(Lemma 5.5). For convenience, we identify
$\rho \mathfrak {Z}\cong \mathfrak {Y}$
(Lemma 5.5). For convenience, we identify
 $\rho \mathfrak {Z}$
and
$\rho \mathfrak {Z}$
and
 $\mathfrak {Y}$
. For every
$\mathfrak {Y}$
. For every
 $x\in \varrho [F]$
define a map
$x\in \varrho [F]$
define a map
 $g_x:f^{-1}(x)\to \varrho ^{-1}(x)$
by setting
$g_x:f^{-1}(x)\to \varrho ^{-1}(x)$
by setting
 $g_x(y_i)=x_i$
(
$g_x(y_i)=x_i$
(
 $i\leq k_x$
). Finally, define
$i\leq k_x$
). Finally, define
 $g:\mathfrak {Z}\to \mathfrak {F}$
by putting
$g:\mathfrak {Z}\to \mathfrak {F}$
by putting
 $g=\bigcup _{x\in \varrho [F]} g_x$
.
$g=\bigcup _{x\in \varrho [F]} g_x$
.
The map g is evidently well defined, surjective, and relation preserving. We claim that moreover, it satisfies the BDC for
 $\mathfrak {D}$
. To see this, let
$\mathfrak {D}$
. To see this, let
 $\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and suppose that
$\mathfrak {d}\in \mathfrak {D}^\Uparrow $
and suppose that
 ${\Uparrow } g(y_i) \cap \mathfrak {d}\neq \varnothing $
. Then there is
${\Uparrow } g(y_i) \cap \mathfrak {d}\neq \varnothing $
. Then there is
 $x_j\in F$
with
$x_j\in F$
with
 $x_j\in \mathfrak {d}$
and
$x_j\in \mathfrak {d}$
and
 $Rg(y_i)x_j$
. By construction also
$Rg(y_i)x_j$
. By construction also
 $\varrho (x_j)\in \varrho [\mathfrak {d}]$
and
$\varrho (x_j)\in \varrho [\mathfrak {d}]$
and
 $R f(\varrho (y_i))\varrho (x_j)$
. As f satisfies the BDC
$R f(\varrho (y_i))\varrho (x_j)$
. As f satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\sigma \rho \mathfrak {D}^\Uparrow $
it follows that there is some
$\sigma \rho \mathfrak {D}^\Uparrow $
it follows that there is some
 $z\in Y$
such that
$z\in Y$
such that
 $R\varrho (y_i)z$
and
$R\varrho (y_i)z$
and
 $f(z)\in \varrho [\mathfrak {d}]$
. We may view z as
$f(z)\in \varrho [\mathfrak {d}]$
. We may view z as
 $\varrho (z_n),$
where
$\varrho (z_n),$
where
 $\varrho ^{-1}(f(z))$
has cardinality
$\varrho ^{-1}(f(z))$
has cardinality
 $k\geq n$
. Surely
$k\geq n$
. Surely
 $Ry_iz_n$
. Furthermore, since
$Ry_iz_n$
. Furthermore, since
 $f(z)\in \varrho [\mathfrak {d}]$
there must be some
$f(z)\in \varrho [\mathfrak {d}]$
there must be some
 $m\leq k$
such that
$m\leq k$
such that
 $f(z)_m=g(z_m)\in \mathfrak {d}$
. By construction
$f(z)_m=g(z_m)\in \mathfrak {d}$
. By construction
 $Rz_nz_m$
and so in turn
$Rz_nz_m$
and so in turn
 $Ry_iz_m$
. This establishes that g indeed satisfies the BDC
$Ry_iz_m$
. This establishes that g indeed satisfies the BDC
 $^\Uparrow $
for
$^\Uparrow $
for
 $\mathfrak {D}^\Uparrow $
. Analogous reasoning shows that g satisfies the BDC
$\mathfrak {D}^\Uparrow $
. Analogous reasoning shows that g satisfies the BDC
 $^\Downarrow $
for
$^\Downarrow $
for
 $\mathfrak {D}^\Downarrow $
. Thus we have shown
$\mathfrak {D}^\Downarrow $
. Thus we have shown
 $\mathfrak {Z}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
. Since
$\mathfrak {Z}\nvDash \mu (\mathfrak {F}, {\mathfrak {D}})$
. Since
 $\mathfrak {Z}\models \tau \mathtt {L}$
, it follows that
$\mathfrak {Z}\models \tau \mathtt {L}$
, it follows that
 $\tau \mathtt {L}$
is Kripke complete.
$\tau \mathtt {L}$
is Kripke complete.
7. Conclusion and further work
This article presented a novel approach to the study of modal companions and related notions based on stable canonical rules. We hope to have shown that our method is effective and quite uniform. With only minor adaptations to a fixed collection of techniques, we provided a unified treatment of the theories of modal and tense companions, and of the Kuznetsov–Muravitsky isomorphism. We offered alternative proofs of classic theorems and established new results.
The techniques presented in this article are based on a blueprint that is easily applicable across signatures. Stable canonical rules can be formulated for any class of algebras which admits a locally finite expandable reduct in the sense of [Reference Ilin26, Chapter 5], and once stable canonical rules are available, there is a clear recipe for adapting our strategy to the case at hand. We propose that further research be done in this direction, in particular addressing the following topics.
Firstly, there are several more general notions of an msi rule system than that we have been working on, and one could try and study the theory of modal companions of such msi rule systems using our method. Some work in this direction has already been done. [Reference Liao32] uses our methods to study bimodal companions of rule systems over
 $\mathtt {IPC}\otimes \mathtt {S4}$
. But there are more general settings to consider. For example, one can try replacing
$\mathtt {IPC}\otimes \mathtt {S4}$
. But there are more general settings to consider. For example, one can try replacing
 $\mathtt {S4}$
with a weaker modal logic, or consider systems in a richer signature with a primitive possibility operator. Wolter and Zakharyashchev [Reference Wolter and Zakharyaschev45, Reference Wolter and Zakharyaschev46] give a very general definition of an msi logic, subsuming the cases we just mentioned, and study the theory of their polymodal companions. We conjecture that our techniques can recover several of the main known results in this area and generalize them to rule systems.
$\mathtt {S4}$
with a weaker modal logic, or consider systems in a richer signature with a primitive possibility operator. Wolter and Zakharyashchev [Reference Wolter and Zakharyaschev45, Reference Wolter and Zakharyaschev46] give a very general definition of an msi logic, subsuming the cases we just mentioned, and study the theory of their polymodal companions. We conjecture that our techniques can recover several of the main known results in this area and generalize them to rule systems.
A second avenue for further research is the theory of modal companions of extensions of the Heyting–Lewis logic, which expands superintuitionistic logic with a strict implication connective. Early work in this area began with de Groot et al. [Reference de Groot, Litak and Pattinson24], and [Reference Liao32] more recently applied our methods to this setting. However, several results remain open, including whether an analogue of the Blok–Esakia theorem holds.
Acknowledgments
We are very grateful to the referee for many useful comments that led to a substantial restructuring and shortening of the article. The referee also spotted an error in one of the original proofs. We are also thankful to Rodrigo Almeida, Guram Bezhanishvili, Cheng Liao, and Tommaso Moraschini for helpful comments and interesting discussions.
Funding
The second author acknowledges the support of the USC Dornsife Graduate School.




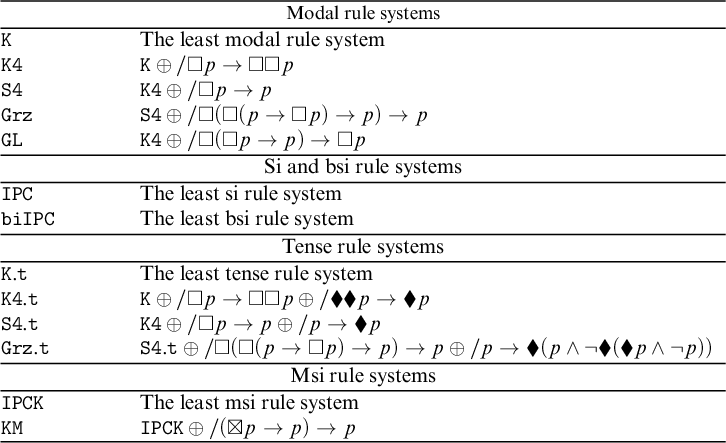

 Open access
Open access