Refine search
Actions for selected content:
212964 results in Engineering
Preface
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp xi-xiv
-
- Chapter
- Export citation
Dedication
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp v-vi
-
- Chapter
- Export citation
Design and dynamic analysis of supporting mechanism for large scale space deployable membrane sunshield
-
- Journal:
- The Aeronautical Journal / Volume 128 / Issue 1327 / September 2024
- Published online by Cambridge University Press:
- 08 February 2024, pp. 1974-2002
-
- Article
- Export citation
8 - System Control
- from Part two - Representation and Planning
-
- Book:
- Computational Principles of Mobile Robotics
- Published online:
- 19 March 2024
- Print publication:
- 08 February 2024, pp 229-251
-
- Chapter
- Export citation
Appendices
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp 596-601
-
- Chapter
- Export citation
7 - Rethink, Rebuild, Rewire
- from Part III - Less Is More
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp 551-593
-
- Chapter
- Export citation
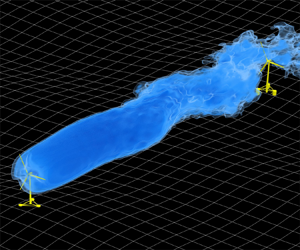
Resolvent-based motion-to-wake modelling of wind turbine wakes under dynamic rotor motion
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 08 February 2024, A48
-
- Article
- Export citation
Index
-
- Book:
- Wireless Communications
- Published online:
- 22 March 2024
- Print publication:
- 08 February 2024, pp 693-708
-
- Chapter
- Export citation
Index
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp 675-702
-
- Chapter
- Export citation
Part I - Out with the Old
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp 11-296
-
- Chapter
- Export citation
Appendix B - Noise Figure Calculations for Link Budgets
-
- Book:
- Wireless Communications
- Published online:
- 22 March 2024
- Print publication:
- 08 February 2024, pp 611-614
-
- Chapter
- Export citation
Appendix A - Unit Abbreviations
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp 596-596
-
- Chapter
- Export citation
Contents
-
- Book:
- Wireless Communications
- Published online:
- 22 March 2024
- Print publication:
- 08 February 2024, pp vii-xviii
-
- Chapter
- Export citation
Calendar of short courses and workshops
-
- Journal:
- Powder Diffraction / Volume 38 / Issue 4 / December 2023
- Published online by Cambridge University Press:
- 08 February 2024, p. 259
-
- Article
-
- You have access
- HTML
- Export citation
Chapter 6 - Modulation Techniques for Mobile Radio
-
- Book:
- Wireless Communications
- Published online:
- 22 March 2024
- Print publication:
- 08 February 2024, pp 255-354
-
- Chapter
- Export citation
Experimental electron density distribution of KZnB3O6 constructed by maximum-entropy method
-
- Journal:
- Powder Diffraction / Volume 38 / Issue 4 / December 2023
- Published online by Cambridge University Press:
- 08 February 2024, pp. 233-239
-
- Article
- Export citation
Appendix B - Probability and Statistics
-
- Book:
- Computational Principles of Mobile Robotics
- Published online:
- 19 March 2024
- Print publication:
- 08 February 2024, pp 370-375
-
- Chapter
- Export citation
2 - Oil and Gas: Twentieth-Century Prosperity
- from Part I - Out with the Old
-
- Book:
- The Truth About Energy
- Published online:
- 01 February 2024
- Print publication:
- 08 February 2024, pp 68-192
-
- Chapter
- Export citation
1 - Overview and Motivation
-
- Book:
- Computational Principles of Mobile Robotics
- Published online:
- 19 March 2024
- Print publication:
- 08 February 2024, pp 1-15
-
- Chapter
- Export citation
PDJ volume 38 issue 4 Cover and Front matter
-
- Journal:
- Powder Diffraction / Volume 38 / Issue 4 / December 2023
- Published online by Cambridge University Press:
- 08 February 2024, pp. f1-f4
-
- Article
-
- You have access
- Export citation
