Refine search
Actions for selected content:
212964 results in Engineering
Part IV - Appendices
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 433-434
-
- Chapter
- Export citation
1 - Introduction
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 1-6
-
- Chapter
- Export citation
Part III - Applications
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 345-346
-
- Chapter
- Export citation
Preface for the Second Edition
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp xi-xii
-
- Chapter
- Export citation
Contents
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp v-viii
-
- Chapter
- Export citation
Improving pilots’ tactical decisions in air combat training using the critical decision method
-
- Journal:
- The Aeronautical Journal / Volume 128 / Issue 1326 / August 2024
- Published online by Cambridge University Press:
- 01 February 2024, pp. 1613-1626
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Notation
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp xv-xvi
-
- Chapter
- Export citation
Aerodynamic design of a high-efficiency two-stage axial turbine, using streamline curvature method and performance optimisation by clocking of stator blades
-
- Journal:
- The Aeronautical Journal / Volume 128 / Issue 1326 / August 2024
- Published online by Cambridge University Press:
- 01 February 2024, pp. 1814-1843
-
- Article
- Export citation
Appendix C - Miscellaneous Extras
- from Part IV - Appendices
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 471-483
-
- Chapter
- Export citation

Turbulent free-surface in self-aerated flows: superposition of entrapped and entrained air
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 01 February 2024, A25
-
- Article
- Export citation
9 - Pose Estimation Problems
- from Part III - Applications
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 347-400
-
- Chapter
- Export citation
10 - Pose-and-Point Estimation Problems
- from Part III - Applications
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 401-417
-
- Chapter
- Export citation
2 - Primer on Probability Theory
- from Part I - Estimation Machinery
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 9-39
-
- Chapter
- Export citation
Part II - Three-Dimensional Machinery
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 215-216
-
- Chapter
- Export citation
Frontmatter
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp i-iv
-
- Chapter
- Export citation
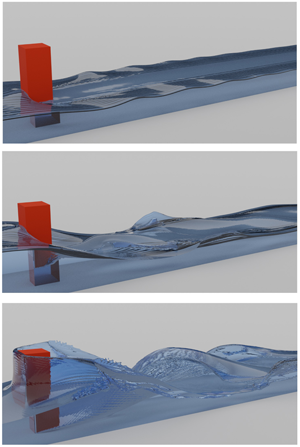
Free-surface channel flow around a square cylinder
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 01 February 2024, A16
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
References
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 501-508
-
- Chapter
- Export citation

Surface gravity wave-induced drift of floating objects in the diffraction regime
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 01 February 2024, A27
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Floating objects will drift due to the action of surface gravity waves. This drift will depart from that of a perfect Lagrangian tracer due to both viscous effects (non-potential flow) and wave–body interaction (potential flow). We examine the drift of freely floating objects in regular (non-breaking) deep-water wave fields for object sizes that are large enough to cause significant diffraction. Systematic numerical simulations are performed using a hybrid numerical solver, qaleFOAM, which deals with both viscosity and wave–body interaction. For very small objects, the model predicts a wave-induced drift equal to the Stokes drift. For larger objects, the drift is generally greater and increases with object size (we examine object sizes up to
 $10\,\%$ of the wavelength). The effects of different shapes, sizes and submergence depths and steepnesses are examined. Furthermore, we derive a ‘diffraction-modified Stokes drift’ akin to Stokes (Trans. Camb. Phil. Soc., vol. 8, 1847, pp. 411–455), but based on the combination of incident, diffracted and radiated wave fields, which are based on potential-flow theory and obtained using the boundary element method. This diffraction-modified Stokes drift explains both qualitatively and quantitatively the increase in drift. Generally, round objects do not diffract the wave field significantly and do not experience a significant drift enhancement as a result. For box-shape objects, drift enhancement is greater for larger objects with greater submergence depths (we report an increase of
$10\,\%$ of the wavelength). The effects of different shapes, sizes and submergence depths and steepnesses are examined. Furthermore, we derive a ‘diffraction-modified Stokes drift’ akin to Stokes (Trans. Camb. Phil. Soc., vol. 8, 1847, pp. 411–455), but based on the combination of incident, diffracted and radiated wave fields, which are based on potential-flow theory and obtained using the boundary element method. This diffraction-modified Stokes drift explains both qualitatively and quantitatively the increase in drift. Generally, round objects do not diffract the wave field significantly and do not experience a significant drift enhancement as a result. For box-shape objects, drift enhancement is greater for larger objects with greater submergence depths (we report an increase of  $92\,\%$ for simulations without viscosity and
$92\,\%$ for simulations without viscosity and  $113\,\%$ with viscosity for a round-cornered box whose size is
$113\,\%$ with viscosity for a round-cornered box whose size is  $10\,\%$ of the wavelength). We identify the specific standing wave pattern that arises near the object because of diffraction as the main cause of the enhanced drift. Viscosity plays a small positive role in the enhanced drift behaviour of large objects, increasing the drift further by approximately
$10\,\%$ of the wavelength). We identify the specific standing wave pattern that arises near the object because of diffraction as the main cause of the enhanced drift. Viscosity plays a small positive role in the enhanced drift behaviour of large objects, increasing the drift further by approximately  $20\,\%$.
$20\,\%$.





Index
-
- Book:
- State Estimation for Robotics
- Published online:
- 11 January 2024
- Print publication:
- 01 February 2024, pp 509-514
-
- Chapter
- Export citation
Multi-band circularly polarized antenna for WLAN and WiMAX applications based on characteristic mode theory
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 6 / July 2024
- Published online by Cambridge University Press:
- 01 February 2024, pp. 1071-1079
-
- Article
- Export citation
