Refine search
Actions for selected content:
212964 results in Engineering
The efficacy of different torque profiles for weight compensation of the hand
-
- Journal:
- Wearable Technologies / Volume 5 / 2024
- Published online by Cambridge University Press:
- 29 January 2024, e2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
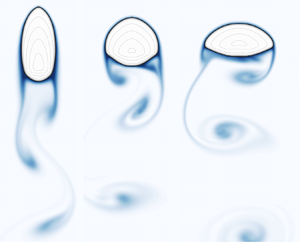
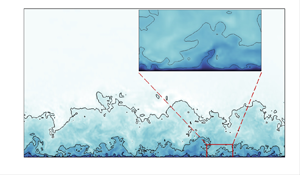
Shape effect on solid melting in flowing liquid
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, R1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Squishy oscillations
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, F1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Vortex ring breakdown dominating the entrainment of a synthetic jet
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A5
-
- Article
- Export citation
-
The understanding of the entrainment mechanism of synthetic jets can help optimise the synthetic jet actuators in engineering applications. It is generally believed that vortex rings or strong velocity fluctuations in the near field of the synthetic jet are responsible for its enhanced entrainment. However, in recent years, it has been found that the enhanced entrainment of the synthetic jet may be caused by the instability or the vortex ring breakdown in the transition region. To shed new light on this issue, synthetic jets with different Reynolds numbers and dimensionless stroke lengths are investigated with time-resolved two-dimensional particle image velocimetry. Based on the analyses of velocity triple-decomposition, Fourier mode decomposition and phase-averaged
 $\lambda _{ci}D/U_0$ field, the streamwise positions of the vortex ring breakdown are determined for the synthetic jets, and the entrainment coefficient can be divided into three components, i.e. the coherent turbulent kinetic energy production, the random turbulent kinetic energy production and the shape of the velocity profile. It is found that the entrainment coefficient is dominated by the component related to the random turbulent kinetic energy production, and reaches its peak value at the position of vortex ring breakdown. The results obtained in different cases show a strong correlation between vortex ring breakdown and entrainment enhancement. From the perspective of instantaneous snapshot, the mechanism of vortex ring breakdown enhanced entrainment is revealed, that is, vortex ring breakdown enhanced the small-scale vortex near the turbulent/non-turbulent interface, resulting in an increase of enstrophy production, and thus enhanced local entrainment.
$\lambda _{ci}D/U_0$ field, the streamwise positions of the vortex ring breakdown are determined for the synthetic jets, and the entrainment coefficient can be divided into three components, i.e. the coherent turbulent kinetic energy production, the random turbulent kinetic energy production and the shape of the velocity profile. It is found that the entrainment coefficient is dominated by the component related to the random turbulent kinetic energy production, and reaches its peak value at the position of vortex ring breakdown. The results obtained in different cases show a strong correlation between vortex ring breakdown and entrainment enhancement. From the perspective of instantaneous snapshot, the mechanism of vortex ring breakdown enhanced entrainment is revealed, that is, vortex ring breakdown enhanced the small-scale vortex near the turbulent/non-turbulent interface, resulting in an increase of enstrophy production, and thus enhanced local entrainment.

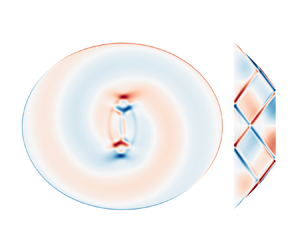
Inertial wave super-attractor in a truncated elliptic cone
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A6
-
- Article
- Export citation
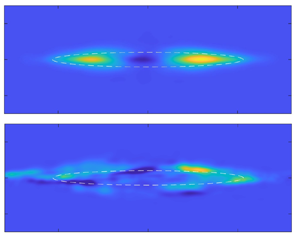
Direct numerical simulation of temporally evolving stratified wakes with ensemble average
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Direct numerical simulations are conducted for temporally evolving stratified wake flows at Reynolds numbers from
 $10\,000$ to
$10\,000$ to  $50\,000$ and Froude numbers from
$50\,000$ and Froude numbers from  $2$ to 50. Unlike previous studies that obtained statistics from a single realization, we take ensemble averages among 80–100 realizations. Our analysis shows that data from one realization incur large convergence errors. These errors reduce quickly as the number of statistical samples increases, with the benefit of ensemble average diminishing beyond 40–60 realizations. The data with ensemble average allow us to test the previously established scalings and arrive at new scaling estimates. Specifically, the data do not support power-law scaling in the centreline velocity deficit
$2$ to 50. Unlike previous studies that obtained statistics from a single realization, we take ensemble averages among 80–100 realizations. Our analysis shows that data from one realization incur large convergence errors. These errors reduce quickly as the number of statistical samples increases, with the benefit of ensemble average diminishing beyond 40–60 realizations. The data with ensemble average allow us to test the previously established scalings and arrive at new scaling estimates. Specifically, the data do not support power-law scaling in the centreline velocity deficit  $U_0$ beyond the near wake. Its decay rate increases continuously from 0.1 at the onset of the non-equilibrium regime until the end of our calculations without reaching any asymptote. Additionally, while no power-law scalings could be found in the wake width (
$U_0$ beyond the near wake. Its decay rate increases continuously from 0.1 at the onset of the non-equilibrium regime until the end of our calculations without reaching any asymptote. Additionally, while no power-law scalings could be found in the wake width ( $L_H$) and wake height (
$L_H$) and wake height ( $L_V$) in the late wake,
$L_V$) in the late wake,  $L_H\sim (Nt)^{1/3}$ is a good working approximation of the wake's horizontal size, where
$L_H\sim (Nt)^{1/3}$ is a good working approximation of the wake's horizontal size, where  $N$ is buoyancy frequency and
$N$ is buoyancy frequency and  $t$ is time. Besides the low-order statistics, we also report the transverse integrated terms and the vertically integrated terms in the turbulent kinetic energy budget equation as a function of the vertical and transverse coordinates. The data indicate that there are two peaks in the vertically integrated production and transport terms, and one peak when the two terms are integrated horizontally.
$t$ is time. Besides the low-order statistics, we also report the transverse integrated terms and the vertically integrated terms in the turbulent kinetic energy budget equation as a function of the vertical and transverse coordinates. The data indicate that there are two peaks in the vertically integrated production and transport terms, and one peak when the two terms are integrated horizontally.









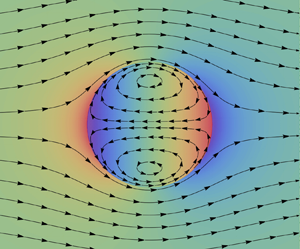
Rarefied gas flow past a liquid droplet: interplay between internal and external flows
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A4
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Dual band circularly polarized partially reflecting surface-loaded dielectric resonator-based MIMO antenna for mm-wave 5G applications
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 7 / September 2024
- Published online by Cambridge University Press:
- 26 January 2024, pp. 1198-1207
-
- Article
- Export citation
Leaky-wave antenna on substrate-integrated waveguide with radiation pattern controlled by DC voltage
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 4 / May 2024
- Published online by Cambridge University Press:
- 26 January 2024, pp. 588-594
-
- Article
- Export citation
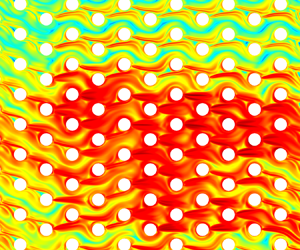
A web of sticky strands: how localized stress controls spatio-temporal fluctuations in viscoelastic flows through a lattice of obstacles
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A7
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Characterization of very-large-scale motions in supersonic and hypersonic turbulent boundary layers
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A8
-
- Article
- Export citation
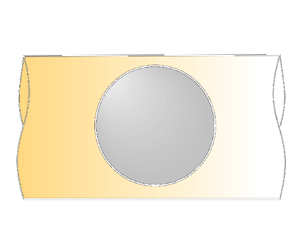
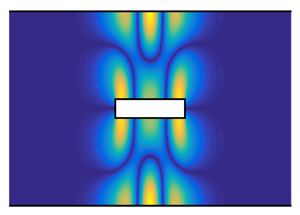
Isotropically active particle closely fitting in a cylindrical channel: spontaneous motion at small Péclet numbers
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A2
-
- Article
- Export citation
-
Spontaneous motion due to symmetry breaking has been predicted theoretically for both active droplets and isotropically active particles in an unbounded fluid domain, provided that their intrinsic Péclet number
 $Pe$ exceeds a critical value. However, due to their inherently small
$Pe$ exceeds a critical value. However, due to their inherently small  $Pe$, this phenomenon has yet to be observed experimentally for active particles. In this paper, we demonstrate theoretically that spontaneous motion for an active spherical particle closely fitting in a cylindrical channel is possible at arbitrarily small
$Pe$, this phenomenon has yet to be observed experimentally for active particles. In this paper, we demonstrate theoretically that spontaneous motion for an active spherical particle closely fitting in a cylindrical channel is possible at arbitrarily small  $Pe$. Scaling arguments in the limit where the dimensionless clearance is
$Pe$. Scaling arguments in the limit where the dimensionless clearance is  $\epsilon \ll 1$ reveal that when
$\epsilon \ll 1$ reveal that when  $Pe=O(\epsilon ^{1/2})$, the confined particle reaches speeds comparable to those achieved in an unbounded fluid at moderate (supercritical)
$Pe=O(\epsilon ^{1/2})$, the confined particle reaches speeds comparable to those achieved in an unbounded fluid at moderate (supercritical)  $Pe$ values. We use matched asymptotic expansions in that distinguished limit, where the fluid domain decomposes into several asymptotic regions: a gap region, where the lubrication approximation applies; particle-scale regions, where the concentration is uniform; and far-field regions, where solute transport is one-dimensional. We derive an asymptotic formula for the particle speed, which is a monotonically decreasing function of
$Pe$ values. We use matched asymptotic expansions in that distinguished limit, where the fluid domain decomposes into several asymptotic regions: a gap region, where the lubrication approximation applies; particle-scale regions, where the concentration is uniform; and far-field regions, where solute transport is one-dimensional. We derive an asymptotic formula for the particle speed, which is a monotonically decreasing function of  $\overline {Pe}=Pe/\epsilon ^{1/2}$ and approaches a finite limit as
$\overline {Pe}=Pe/\epsilon ^{1/2}$ and approaches a finite limit as  $\overline {Pe}\searrow 0$. Our results could pave the way for experimental realisations of symmetry-breaking spontaneous motion in active particles.
$\overline {Pe}\searrow 0$. Our results could pave the way for experimental realisations of symmetry-breaking spontaneous motion in active particles.








Energy efficient microwave curing of carbon fiber reinforced polymer via metamaterial matching and advanced electromagnetic exposure control
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 10 / December 2024
- Published online by Cambridge University Press:
- 26 January 2024, pp. 1671-1677
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Combining soft robotics and telerehabilitation for improving motor function after stroke
-
- Journal:
- Wearable Technologies / Volume 5 / 2024
- Published online by Cambridge University Press:
- 26 January 2024, e1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Design, fabrication, and measurement of a miniaturized MIMO antenna applicable for 5G communication
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 4 / May 2024
- Published online by Cambridge University Press:
- 26 January 2024, pp. 567-578
-
- Article
- Export citation
Commonality and difference in the eigenfunctions of various types of acoustic trapped modes
-
- Journal:
- Journal of Fluid Mechanics / Volume 980 / 10 February 2024
- Published online by Cambridge University Press:
- 26 January 2024, A1
-
- Article
- Export citation
The influence of surface roughness on postcritical flow over circular cylinders revisited – CORRIGENDUM
-
- Journal:
- Journal of Fluid Mechanics / Volume 979 / 25 January 2024
- Published online by Cambridge University Press:
- 26 January 2024, E1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Wall-attached convection under strong inclined magnetic fields
-
- Journal:
- Journal of Fluid Mechanics / Volume 979 / 25 January 2024
- Published online by Cambridge University Press:
- 25 January 2024, A53
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Reliability assessment of off-policy deep reinforcement learning: A benchmark for aerodynamics
-
- Journal:
- Data-Centric Engineering / Volume 5 / 2024
- Published online by Cambridge University Press:
- 25 January 2024, e2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
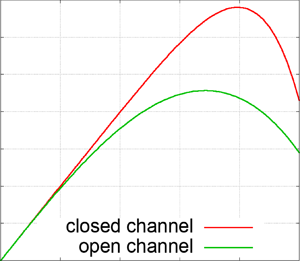
The open channel in a uniform representation of the turbulent velocity profile across all parallel geometries
-
- Journal:
- Journal of Fluid Mechanics / Volume 979 / 25 January 2024
- Published online by Cambridge University Press:
- 25 January 2024, R1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
