Refine search
Actions for selected content:
212971 results in Engineering
A.7 - Color Chart for Thermally Grown SiO2 Films Observed Perpendicularly under Daylight Fluorescent Lighting
- from Appendices
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp 646-646
-
- Chapter
- Export citation
References
-
- Book:
- Cryptoeconomics
- Published online:
- 06 January 2024
- Print publication:
- 16 November 2023, pp 255-279
-
- Chapter
- Export citation
9 - Machine Learning
-
- Book:
- Introduction to Intelligent Systems, Control, and Machine Learning using MATLAB
- Published online:
- 27 November 2023
- Print publication:
- 16 November 2023, pp 323-374
-
- Chapter
- Export citation
Calendar of Forthcoming Meetings
-
- Journal:
- Powder Diffraction / Volume 38 / Issue 4 / December 2023
- Published online by Cambridge University Press:
- 16 November 2023, p. 260
-
- Article
-
- You have access
- HTML
- Export citation
A.3 - Useful Conversions
- from Appendices
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp 642-642
-
- Chapter
- Export citation
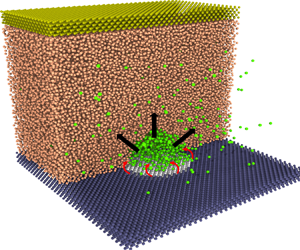
Minimum current for detachment of electrolytic bubbles
-
- Journal:
- Journal of Fluid Mechanics / Volume 975 / 25 November 2023
- Published online by Cambridge University Press:
- 16 November 2023, R3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
The efficiency of water electrolysis is significantly impacted by the generation of micro- and nanobubbles on the electrodes. Here molecular dynamics simulations are used to investigate the dynamics of single electrolytic nanobubbles on nanoelectrodes. The simulations reveal that, depending on the value of current, nucleated nanobubbles either grow to an equilibrium state or grow unlimitedly and then detach. To account for these findings, the stability theory for surface nanobubbles is generalized by incorporating the electrolytic gas influx at the nanobubble's contact line and adopting a real gas law, leading to accurate predictions for the numerically observed transient growth and stationary states of the nanobubbles. With this theory, the minimum current for bubble detachment can also be derived analytically. In the detachment regime, the radius of the nanobubble first increases with time (t) as
 $R\propto t^{1/2}$ and then as
$R\propto t^{1/2}$ and then as  $R\propto t^{1/3}$, up to bubble detachment.
$R\propto t^{1/3}$, up to bubble detachment.


A.10 - List of Important Symbols
- from Appendices
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp 653-653
-
- Chapter
- Export citation
Part IV - Open Questions of Cryptoeconomics
-
- Book:
- Cryptoeconomics
- Published online:
- 06 January 2024
- Print publication:
- 16 November 2023, pp 243-244
-
- Chapter
- Export citation
8 - Contract Theory
- from Part III - Mechanism Design in Blockchain Networks and Beyond
-
- Book:
- Cryptoeconomics
- Published online:
- 06 January 2024
- Print publication:
- 16 November 2023, pp 171-209
-
- Chapter
- Export citation
Contents
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp v-xii
-
- Chapter
- Export citation
Index
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp 657-662
-
- Chapter
- Export citation
7 - Auction Theory
- from Part III - Mechanism Design in Blockchain Networks and Beyond
-
- Book:
- Cryptoeconomics
- Published online:
- 06 January 2024
- Print publication:
- 16 November 2023, pp 134-170
-
- Chapter
- Export citation
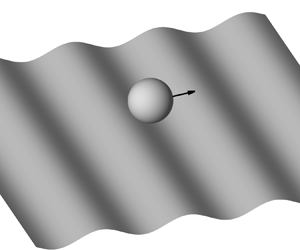
Slow motion of a sphere near a sinusoidal surface
-
- Journal:
- Journal of Fluid Mechanics / Volume 975 / 25 November 2023
- Published online by Cambridge University Press:
- 16 November 2023, A31
-
- Article
- Export citation
6 - Artificial Neural Networks
-
- Book:
- Introduction to Intelligent Systems, Control, and Machine Learning using MATLAB
- Published online:
- 27 November 2023
- Print publication:
- 16 November 2023, pp 177-224
-
- Chapter
- Export citation
1 - Historical Perspective, Moore’s Law and Future Technology Prospects
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp 1-36
-
- Chapter
- Export citation
A.8 - Irvin Curves
- from Appendices
-
- Book:
- Integrated Circuit Fabrication
- Published online:
- 01 December 2023
- Print publication:
- 16 November 2023, pp 647-648
-
- Chapter
- Export citation
7 - Hybrid Intelligent Systems
-
- Book:
- Introduction to Intelligent Systems, Control, and Machine Learning using MATLAB
- Published online:
- 27 November 2023
- Print publication:
- 16 November 2023, pp 225-251
-
- Chapter
- Export citation

Direct numerical simulation of Taylor–Couette flow with vertical asymmetric rough walls
-
- Journal:
- Journal of Fluid Mechanics / Volume 975 / 25 November 2023
- Published online by Cambridge University Press:
- 16 November 2023, A30
-
- Article
- Export citation
-
Direct numerical simulations are performed to explore the effects of the rotating direction of the vertically asymmetric rough wall on the transport properties of Taylor–Couette (TC) flow, up to a Taylor number of
 ${Ta} = 2.39\times 10^{7}$. It is shown that, compared with the smooth wall, the rough wall with vertical asymmetric strips can enhance the dimensionless torque
${Ta} = 2.39\times 10^{7}$. It is shown that, compared with the smooth wall, the rough wall with vertical asymmetric strips can enhance the dimensionless torque  ${Nu}_{\omega }$. More importantly, at high Ta, clockwise rotation of the inner rough wall (where the fluid is sheared by the steeper slope side of the strips) results in a significantly greater torque enhancement compared to counter-clockwise rotation (where the fluid is sheared by the smaller slope side of the strips), due to the larger convective contribution to the angular velocity flux. However, the rotating direction has a negligible effect on the torque at low Ta. The larger torque enhancement caused by the clockwise rotation of the vertically asymmetric rough wall at high Ta is then explained by the stronger coupling between the rough wall and the bulk, attributed to the larger biased azimuthal velocity towards the rough wall at the mid-gap of the TC system, the increased turbulence intensity manifested by larger Reynolds stress and a thinner boundary layer, and the more significant contribution of the pressure force on the surface of the rough wall to the torque.
${Nu}_{\omega }$. More importantly, at high Ta, clockwise rotation of the inner rough wall (where the fluid is sheared by the steeper slope side of the strips) results in a significantly greater torque enhancement compared to counter-clockwise rotation (where the fluid is sheared by the smaller slope side of the strips), due to the larger convective contribution to the angular velocity flux. However, the rotating direction has a negligible effect on the torque at low Ta. The larger torque enhancement caused by the clockwise rotation of the vertically asymmetric rough wall at high Ta is then explained by the stronger coupling between the rough wall and the bulk, attributed to the larger biased azimuthal velocity towards the rough wall at the mid-gap of the TC system, the increased turbulence intensity manifested by larger Reynolds stress and a thinner boundary layer, and the more significant contribution of the pressure force on the surface of the rough wall to the torque.


Part III - Mechanism Design in Blockchain Networks and Beyond
-
- Book:
- Cryptoeconomics
- Published online:
- 06 January 2024
- Print publication:
- 16 November 2023, pp 95-96
-
- Chapter
- Export citation
3 - Fuzzy Inference and Fuzzy Logic Control
-
- Book:
- Introduction to Intelligent Systems, Control, and Machine Learning using MATLAB
- Published online:
- 27 November 2023
- Print publication:
- 16 November 2023, pp 60-108
-
- Chapter
- Export citation
