Refine search
Actions for selected content:
212709 results in Engineering

Large-eddy simulations of conical hypersonic turbulent boundary layers over cooled walls via volumetric rescaling method
-
- Journal:
- Journal of Fluid Mechanics / Volume 1003 / 25 January 2025
- Published online by Cambridge University Press:
- 20 January 2025, A28
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Large-eddy simulations (LES) of a hypersonic boundary layer on a
 $7^\circ$-half-angle cone are performed to investigate the effects of highly cooled walls (wall-to-recovery temperature ratio of
$7^\circ$-half-angle cone are performed to investigate the effects of highly cooled walls (wall-to-recovery temperature ratio of  $T_w / T_r \sim 0.1$) on fully developed turbulence and to validate a newly developed rescaling method based on volumetric flow extraction. Two Reynolds numbers are considered,
$T_w / T_r \sim 0.1$) on fully developed turbulence and to validate a newly developed rescaling method based on volumetric flow extraction. Two Reynolds numbers are considered,  $Re_m = 4.1 \times 10^6\ \text {m}^{-1}$ and
$Re_m = 4.1 \times 10^6\ \text {m}^{-1}$ and  $6.4 \times 10^6\ \text {m}^{-1}$, at free-stream Mach numbers of
$6.4 \times 10^6\ \text {m}^{-1}$, at free-stream Mach numbers of  $M_\infty = 7.4$. A comparison with a reference laminar-to-turbulent simulation, capturing the full history of the transitional flow dynamics, reveals that the volumetric rescaling method can generate a synthetic turbulent inflow that preserves the structure of the fluctuations. Equilibrium conditions are recovered after approximately 40 inlet boundary layer thicknesses. Numerical trials show that a longer streamwise extent of the rescaling box increases numerical stability. Analyses of turbulent statistics and flow visualizations reveal strong pressure oscillations, up to
$M_\infty = 7.4$. A comparison with a reference laminar-to-turbulent simulation, capturing the full history of the transitional flow dynamics, reveals that the volumetric rescaling method can generate a synthetic turbulent inflow that preserves the structure of the fluctuations. Equilibrium conditions are recovered after approximately 40 inlet boundary layer thicknesses. Numerical trials show that a longer streamwise extent of the rescaling box increases numerical stability. Analyses of turbulent statistics and flow visualizations reveal strong pressure oscillations, up to  $50\,\%$ of local mean pressure near the wall, and two-dimensional longitudinal wave structures resembling second-mode waves, with wavelengths up to 50 % of the boundary layer thickness, and convective Mach numbers of
$50\,\%$ of local mean pressure near the wall, and two-dimensional longitudinal wave structures resembling second-mode waves, with wavelengths up to 50 % of the boundary layer thickness, and convective Mach numbers of  $M_c \simeq 4.5$. It is shown that their quasi-periodic recurrence in the flow is not an artefact of the rescaling method. Strong and localized temperature fluctuations and spikes in the wall-heat flux are associated with such waves. Very high values of temperature variance near the wall result in oscillations of the wall-heat flux exceeding its average. Instances of near-wall temperature falling below the imposed wall temperature of
$M_c \simeq 4.5$. It is shown that their quasi-periodic recurrence in the flow is not an artefact of the rescaling method. Strong and localized temperature fluctuations and spikes in the wall-heat flux are associated with such waves. Very high values of temperature variance near the wall result in oscillations of the wall-heat flux exceeding its average. Instances of near-wall temperature falling below the imposed wall temperature of  $T_w=300$ K result in pockets of instantaneous heat flux oriented against the statistical mean direction.
$T_w=300$ K result in pockets of instantaneous heat flux oriented against the statistical mean direction.








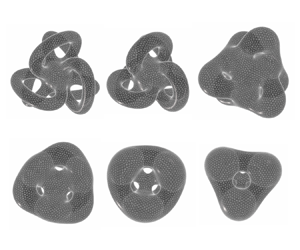
Stokes flow of an evolving fluid film with arbitrary shape and topology
-
- Journal:
- Journal of Fluid Mechanics / Volume 1003 / 25 January 2025
- Published online by Cambridge University Press:
- 20 January 2025, R1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Small-scale interface dynamic modelling based on the geometric method of moments for a two-scale two-phase flow model with a disperse small scale
-
- Journal:
- Journal of Fluid Mechanics / Volume 1003 / 25 January 2025
- Published online by Cambridge University Press:
- 20 January 2025, A27
-
- Article
- Export citation
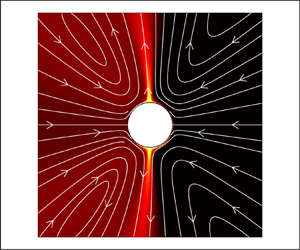
Optimal feeding in swimming and attached ciliates
-
- Journal:
- Journal of Fluid Mechanics / Volume 1003 / 25 January 2025
- Published online by Cambridge University Press:
- 20 January 2025, A26
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Ciliated microorganisms near the base of the aquatic food chain either swim to encounter prey or attach at a substrate and generate feeding currents to capture passing particles. Here, we represent attached and swimming ciliates using a popular spherical model in viscous fluid with slip surface velocity that affords analytical expressions of ciliary flows. We solve an advection–diffusion equation for the concentration of dissolved nutrients, where the Péclet number (
 $Pe$) reflects the ratio of diffusive to advective time scales. For a fixed hydrodynamic power expenditure, we ask what ciliary surface velocities maximize nutrient flux at the microorganism's surface. We find that surface motions that optimize feeding depend on
$Pe$) reflects the ratio of diffusive to advective time scales. For a fixed hydrodynamic power expenditure, we ask what ciliary surface velocities maximize nutrient flux at the microorganism's surface. We find that surface motions that optimize feeding depend on  $Pe$. For freely swimming microorganisms at finite
$Pe$. For freely swimming microorganisms at finite  $Pe$, it is optimal to swim by employing a ‘treadmill’ surface motion, but in the limit of large
$Pe$, it is optimal to swim by employing a ‘treadmill’ surface motion, but in the limit of large  $Pe$, there is no difference between this treadmill solution and a symmetric dipolar surface velocity that keeps the organism stationary. For attached microorganisms, the treadmill solution is optimal for feeding at
$Pe$, there is no difference between this treadmill solution and a symmetric dipolar surface velocity that keeps the organism stationary. For attached microorganisms, the treadmill solution is optimal for feeding at  $Pe$ below a critical value, but at larger
$Pe$ below a critical value, but at larger  $Pe$ values, the dipolar surface motion is optimal. We verified these results in open-loop numerical simulations and asymptotic analysis, and using an adjoint-based optimization method. Our findings challenge existing claims that optimal feeding is optimal swimming across all Péclet numbers, and provide new insights into the prevalence of both attached and swimming solutions in oceanic microorganisms.
$Pe$ values, the dipolar surface motion is optimal. We verified these results in open-loop numerical simulations and asymptotic analysis, and using an adjoint-based optimization method. Our findings challenge existing claims that optimal feeding is optimal swimming across all Péclet numbers, and provide new insights into the prevalence of both attached and swimming solutions in oceanic microorganisms.






Machine learning and uncertainty quantification to track and monitor natural frequencies in vibration-based SHM applied to offshore wind turbines
- Part of
-
- Journal:
- Data-Centric Engineering / Volume 6 / 2025
- Published online by Cambridge University Press:
- 20 January 2025, e7
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Mitigation of flow separation in a highly bent intake duct with active and passive flow control
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1335 / May 2025
- Published online by Cambridge University Press:
- 17 January 2025, pp. 1381-1398
-
- Article
- Export citation
Robust successive generalised dynamic inversion control of satellite launch vehicles
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1335 / May 2025
- Published online by Cambridge University Press:
- 17 January 2025, pp. 1182-1214
-
- Article
- Export citation
Collaborative navigation method based on adaptive time-varying factor graph
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1333 / March 2025
- Published online by Cambridge University Press:
- 17 January 2025, pp. 788-801
-
- Article
- Export citation
X-ray speckle reduction using a high-speed piezoelectric deformable mirror system
-
- Journal:
- High Power Laser Science and Engineering / Volume 13 / 2025
- Published online by Cambridge University Press:
- 17 January 2025, e22
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Numerical analysis of the impact of release timing on trajectory in internal store separation
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1335 / May 2025
- Published online by Cambridge University Press:
- 17 January 2025, pp. 1361-1380
-
- Article
- Export citation
Appendix A - Linear Algebra Primer
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp 309-310
-
- Chapter
- Export citation
Hydrogen bonding in the crystal structure of molnupiravir Form I, C13H19N3O7
-
- Journal:
- Powder Diffraction / Volume 40 / Issue 1 / March 2025
- Published online by Cambridge University Press:
- 16 January 2025, pp. 72-75
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
1 - Mathematical Optimization
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp 1-14
-
- Chapter
- Export citation
7 - Accounting for Uncertainty: Optimization Meets Reality
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp 203-212
-
- Chapter
- Export citation
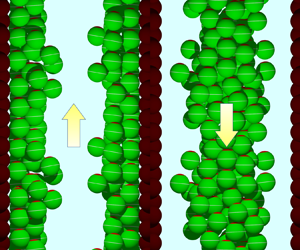
Poiseuille flow of a concentrated suspension of squirmers
-
- Journal:
- Journal of Fluid Mechanics / Volume 1003 / 25 January 2025
- Published online by Cambridge University Press:
- 16 January 2025, A23
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Figures
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp x-xiii
-
- Chapter
- Export citation
References
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp 331-332
-
- Chapter
- Export citation
9 - Stochastic Optimization
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp 239-264
-
- Chapter
- Export citation
Preface
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp xvii-xviii
-
- Chapter
- Export citation
Tables
-
- Book:
- Hands-On Mathematical Optimization with Python
- Published online:
- 14 May 2025
- Print publication:
- 16 January 2025, pp xiv-xvi
-
- Chapter
- Export citation
