Refine search
Actions for selected content:
212908 results in Engineering
Data-driven transient lift attenuation for extreme vortex gust–airfoil interactions
-
- Journal:
- Journal of Fluid Mechanics / Volume 992 / 10 August 2024
- Published online by Cambridge University Press:
- 10 September 2024, A17
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

The effect of Reynolds number on the separated flow over a low-aspect-ratio wing
-
- Journal:
- Journal of Fluid Mechanics / Volume 992 / 10 August 2024
- Published online by Cambridge University Press:
- 10 September 2024, R2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
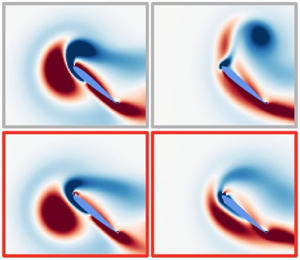
At high incidence, low-aspect-ratio wings present a unique set of aerodynamic characteristics, including flow separation, vortex shedding and unsteady force production. Furthermore, low-aspect-ratio wings exhibit a highly impactful tip vortex, which introduces strong spanwise gradients into an already complex flow. In this work, we explore the interaction between leading-edge flow separation and a strong, persistent tip vortex over a Reynolds number range of
 $600 \leq Re \leq 10{\,}000$. In performing this study, we aim to bridge the insight gained from existing low-Reynolds-number studies of separated flow on finite wings (
$600 \leq Re \leq 10{\,}000$. In performing this study, we aim to bridge the insight gained from existing low-Reynolds-number studies of separated flow on finite wings ( $Re \approx 10^2$) and turbulent flows at higher Reynolds numbers (
$Re \approx 10^2$) and turbulent flows at higher Reynolds numbers ( $Re \approx 10^4$). Our study suggests two primary effects of the Reynolds number. First, we observe a break from periodicity, along with a dramatic increase in the intensity and concentration of small-scale eddies, as we shift from
$Re \approx 10^4$). Our study suggests two primary effects of the Reynolds number. First, we observe a break from periodicity, along with a dramatic increase in the intensity and concentration of small-scale eddies, as we shift from  $Re = 600$ to
$Re = 600$ to  $Re = 2500$. Second, we observe that many of our flow diagnostics, including the time-averaged aerodynamic force, exhibit reduced sensitivity to Reynolds number beyond
$Re = 2500$. Second, we observe that many of our flow diagnostics, including the time-averaged aerodynamic force, exhibit reduced sensitivity to Reynolds number beyond  $Re = 2500$, an observation attributed to the stabilising impact of the wing tip vortex. This latter point illustrates the manner by which the tip vortex drives flow over low-aspect-ratio wings, and provides insight into how our existing understanding of this flow field may be adjusted for higher-Reynolds-number applications.
$Re = 2500$, an observation attributed to the stabilising impact of the wing tip vortex. This latter point illustrates the manner by which the tip vortex drives flow over low-aspect-ratio wings, and provides insight into how our existing understanding of this flow field may be adjusted for higher-Reynolds-number applications.






A numerical study of volcanic ash ingestion and erosion of the front components of a high bypass turbofan engine
- Part of
-
- Journal:
- The Aeronautical Journal / Volume 128 / Issue 1325 / July 2024
- Published online by Cambridge University Press:
- 09 September 2024, pp. 1450-1484
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
A study on the relationships between factors contributing to fishing vessel collision accidents and hull damage severity in South Korea
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 23 May 2025, pp. 624-644
- Print publication:
- September 2024
-
- Article
- Export citation
Augmented reality projection errors in maritime navigation
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 27 June 2025, pp. 736-755
- Print publication:
- September 2024
-
- Article
- Export citation
An approach to establishing evaluation criteria for unmanned surface vessel manoeuvres during COLREGs encounters
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 23 May 2025, pp. 645-657
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
A study on AIS positional error analysis and transmission frequency requirements of attitude data for future vessel monitoring
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 26 May 2025, pp. 677-694
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
A general extreme value-based Gaussian global navigation satellite systems measurement error distribution for mission-critical applications
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 26 May 2025, pp. 695-708
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
NAV volume 77 issue 5-6 Cover and Back matter
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 25 September 2025, pp. b1-b2
- Print publication:
- September 2024
-
- Article
-
- You have access
- Export citation
Robust centroid extraction using the hybrid genetic algorithm with applications to planetary optical navigation
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 11 March 2025, pp. 575-593
- Print publication:
- September 2024
-
- Article
- Export citation
A brain-inspired relative navigation method for collective UAVs based on neurodynamics of social place cells and grid cells
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 11 March 2025, pp. 559-574
- Print publication:
- September 2024
-
- Article
- Export citation
NAV volume 77 issue 5-6 Cover and Front matter
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 25 September 2025, pp. f1-f2
- Print publication:
- September 2024
-
- Article
-
- You have access
- Export citation
The plain scale from Warwick (1619)
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 03 April 2025, pp. 612-623
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Grid-based 3DMA GNSS with clustering and Doppler velocity using factor graph optimisation
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 26 May 2025, pp. 658-676
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Decision-making and risk-taking under uncertainty in safety-critical systems: a study among aviation employees
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 13 June 2025, pp. 723-735
- Print publication:
- September 2024
-
- Article
- Export citation
A fuzzy-hybrid SHELL framework for predicting air traffic conflict detection and resolution performance: a human-factors perspective
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 27 March 2025, pp. 594-611
- Print publication:
- September 2024
-
- Article
- Export citation
Ship domain-based traffic capacity of Singapore Strait
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 5-6 / September 2024
- Published online by Cambridge University Press:
- 28 May 2025, pp. 709-722
- Print publication:
- September 2024
-
- Article
- Export citation
Simulation and scaling analysis of periodic surfaces with small-scale roughness in turbulent Ekman flow
-
- Journal:
- Journal of Fluid Mechanics / Volume 992 / 10 August 2024
- Published online by Cambridge University Press:
- 30 August 2024, A8
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
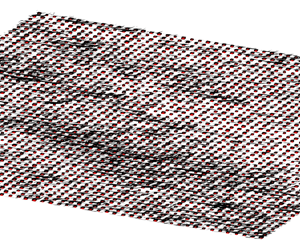
Roughness of the surface underlying the atmospheric boundary layer causes departures of the near-surface scalar and momentum transport in comparison with aerodynamically smooth surfaces. Here, we investigate the effect of
 $56\times 56$ homogeneously distributed roughness elements on bulk properties of a turbulent Ekman flow. Direct numerical simulation in combination with an immersed boundary method is performed for fully resolved, three-dimensional roughness elements. The packing density is approximately
$56\times 56$ homogeneously distributed roughness elements on bulk properties of a turbulent Ekman flow. Direct numerical simulation in combination with an immersed boundary method is performed for fully resolved, three-dimensional roughness elements. The packing density is approximately  $10\,\%$ and the roughness elements have a mean height in wall units of
$10\,\%$ and the roughness elements have a mean height in wall units of  $10 \lesssim H^+ \lesssim 40$. According to their roughness Reynolds numbers, the cases are transitionally rough, although the roughest case is on the verge of being fully rough. We derive the friction of velocity and of the passive scalar through vertical integration of the respective balances. Thereby, we quantify the enhancement of turbulent activity with increasing roughness height and find a scaling for the friction Reynolds number that is verified up to
$10 \lesssim H^+ \lesssim 40$. According to their roughness Reynolds numbers, the cases are transitionally rough, although the roughest case is on the verge of being fully rough. We derive the friction of velocity and of the passive scalar through vertical integration of the respective balances. Thereby, we quantify the enhancement of turbulent activity with increasing roughness height and find a scaling for the friction Reynolds number that is verified up to  $Re_\tau \approx 2700$. The higher level of turbulent activity results in a deeper logarithmic layer for the rough cases and an increase of the near-surface wind veer in spite of higher
$Re_\tau \approx 2700$. The higher level of turbulent activity results in a deeper logarithmic layer for the rough cases and an increase of the near-surface wind veer in spite of higher  $Re_\tau$. We estimate the von Kármán constant for the horizontal velocity
$Re_\tau$. We estimate the von Kármán constant for the horizontal velocity  $\kappa _{m}=0.42$ (offset
$\kappa _{m}=0.42$ (offset  $A=5.44$) and for the passive scalar
$A=5.44$) and for the passive scalar  $\kappa _{h}=0.35$ (offset
$\kappa _{h}=0.35$ (offset  $\mathbb {A}=4.2$). We find an accurate collapse of the data under the rough-wall scaling in the logarithmic layer, which also yields a scaling for the roughness parameters
$\mathbb {A}=4.2$). We find an accurate collapse of the data under the rough-wall scaling in the logarithmic layer, which also yields a scaling for the roughness parameters  $z$-nought for momentum (
$z$-nought for momentum ( $z_{0{m}}$) and the passive scalar (
$z_{0{m}}$) and the passive scalar ( $z_{0{h}}$).
$z_{0{h}}$).













Signals, Systems, and Signal Processing
-
- Published online:
- 29 August 2024
- Print publication:
- 13 June 2024
-
- Textbook
- Export citation

Onset of turbulence in rotor–stator cavity flows
-
- Journal:
- Journal of Fluid Mechanics / Volume 991 / 25 July 2024
- Published online by Cambridge University Press:
- 28 August 2024, A3
-
- Article
- Export citation
