Refine search
Actions for selected content:
212937 results in Engineering
Honeycomb structure filling morphing wing trailing edge: Design strategy, deformation feedback, and active control
- Part of
-
- Journal:
- Programmable Materials / Volume 2 / 2024
- Published online by Cambridge University Press:
- 03 May 2024, e2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Fibre-based stretchable electrodes for flexible metamaterial electronics: A review
- Part of
-
- Journal:
- Programmable Materials / Volume 2 / 2024
- Published online by Cambridge University Press:
- 03 May 2024, e3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Can we develop holistic approaches to delivering cyber-physical systems security?
-
- Journal:
- Research Directions: Cyber-Physical Systems / Volume 2 / 2024
- Published online by Cambridge University Press:
- 03 May 2024, e2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
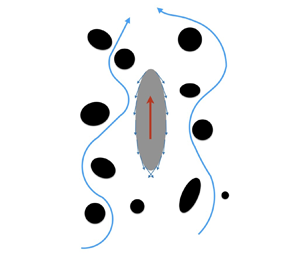
The effect of particle geometry on squirming in a heterogeneous medium
-
- Journal:
- Journal of Fluid Mechanics / Volume 986 / 10 May 2024
- Published online by Cambridge University Press:
- 03 May 2024, A20
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
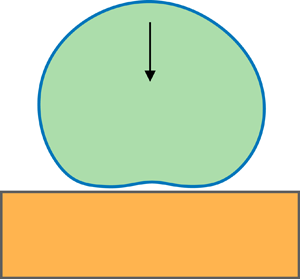
Similarity solutions in elastohydrodynamic bouncing
-
- Journal:
- Journal of Fluid Mechanics / Volume 986 / 10 May 2024
- Published online by Cambridge University Press:
- 03 May 2024, A13
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
FLM volume 985 Cover and Front matter
-
- Journal:
- Journal of Fluid Mechanics / Volume 985 / 25 April 2024
- Published online by Cambridge University Press:
- 03 May 2024, p. f1
-
- Article
-
- You have access
- Export citation
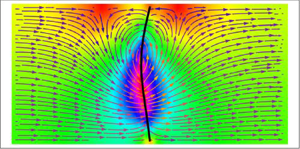
Snap-induced flow in a closed channel
-
- Journal:
- Journal of Fluid Mechanics / Volume 986 / 10 May 2024
- Published online by Cambridge University Press:
- 02 May 2024, A12
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Learning-based augmentation of physics-based models: an industrial robot use case
- Part of
-
- Journal:
- Data-Centric Engineering / Volume 5 / 2024
- Published online by Cambridge University Press:
- 02 May 2024, e12
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
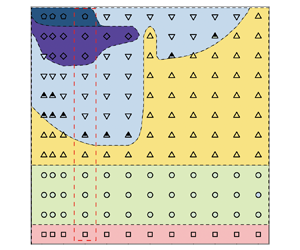
Vortex-induced rotation of a square cylinder under the influence of Reynolds number and density ratio
-
- Journal:
- Journal of Fluid Mechanics / Volume 986 / 10 May 2024
- Published online by Cambridge University Press:
- 02 May 2024, A15
-
- Article
- Export citation
-
Numerical simulations are carried out on the vortex-induced rotations of a freely rotatable rigid square cylinder in a two-dimensional uniform cross-flow. A range of Reynolds numbers between 40 and 150 and density ratios between 0.1 and 10 are considered. Results show eight different characteristic regimes, expanding the classification of Ryu & Iaccarino (J. Fluid Mech., vol. 813, 2017, pp. 482–507). New regimes include the transition and wavy rotation regimes; in the
 ${\rm \pi}$-limited oscillation regime we observe multipeak subregimes. Moment-generating mechanisms of these regimes and subregimes are further elucidated. A phenomenon related to the influence of density ratio is the tooth-like shape of the
${\rm \pi}$-limited oscillation regime we observe multipeak subregimes. Moment-generating mechanisms of these regimes and subregimes are further elucidated. A phenomenon related to the influence of density ratio is the tooth-like shape of the  ${\rm \pi} /2$-limit oscillation regime observed in the regime map, which is explained as a result of the imbalance relation between the main frequencies of rotation response and the vortex shedding frequency. In addition, existence of multiple regimes and multistable states are discussed, indicating multiple stable attractive structures in phase space.
${\rm \pi} /2$-limit oscillation regime observed in the regime map, which is explained as a result of the imbalance relation between the main frequencies of rotation response and the vortex shedding frequency. In addition, existence of multiple regimes and multistable states are discussed, indicating multiple stable attractive structures in phase space.


Ciliary propulsion through non-uniform flows
-
- Journal:
- Journal of Fluid Mechanics / Volume 986 / 10 May 2024
- Published online by Cambridge University Press:
- 02 May 2024, A14
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Research on ship trajectory compression based on a Dynamic Programming algorithm
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 13 January 2025, pp. 376-394
- Print publication:
- May 2024
-
- Article
- Export citation
Motor learning theory can benefit seafarers
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 10 February 2025, pp. 415-426
- Print publication:
- May 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
NAV volume 77 issue 3 Cover and Back matter
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 30 April 2025, pp. b1-b2
- Print publication:
- May 2024
-
- Article
-
- You have access
- Export citation
Enhancing the function of the aids to navigation by practical usage of the deep learning algorithm
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 13 January 2025, pp. 347-358
- Print publication:
- May 2024
-
- Article
- Export citation
PGL: A short-time model for ship trajectory prediction
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 13 January 2025, pp. 359-375
- Print publication:
- May 2024
-
- Article
- Export citation
A calibration method for accelerometer combination on centrifuge based on norm-observation method
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 13 January 2025, pp. 322-336
- Print publication:
- May 2024
-
- Article
- Export citation
A study on the effects of rapid training method related to ship handling in decision-making skills under stressful situations
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 10 February 2025, pp. 395-414
- Print publication:
- May 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Gravity-aided navigation using Viterbi map matching algorithm
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 13 January 2025, pp. 307-321
- Print publication:
- May 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
NAV volume 77 issue 3 Cover and Front matter
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 30 April 2025, pp. f1-f2
- Print publication:
- May 2024
-
- Article
-
- You have access
- Export citation
A fishing vessel operational behaviour identification method based on 1D CNN-LSTM
-
- Journal:
- The Journal of Navigation / Volume 77 / Issue 3 / May 2024
- Published online by Cambridge University Press:
- 13 January 2025, pp. 337-346
- Print publication:
- May 2024
-
- Article
- Export citation
