Refine search
Actions for selected content:
179478 results in Earth and Environmental Sciences
Antifungal properties and membrane-disrupting action of two modified aquatic antimicrobial peptides
-
- Journal:
- Journal of the Marine Biological Association of the United Kingdom / Volume 105 / 2025
- Published online by Cambridge University Press:
- 01 July 2025, e71
-
- Article
- Export citation
NAV volume 78 issue 4-6 Cover and Back matter
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 11 May 2026, pp. b1-b2
- Print publication:
- July 2025
-
- Article
-
- You have access
- Export citation
Bibliometric analysis of smart port cybersecurity research
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 16 April 2026, pp. 474-492
- Print publication:
- July 2025
-
- Article
- Export citation
Wayfinding behaviours in natural environments
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 25 November 2025, pp. 369-383
- Print publication:
- July 2025
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Path planning and collision avoidance technologies for maritime autonomous surface ships: a review of COLREGs compliance, algorithmic trends and the navigation-GPT framework
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 20 February 2026, pp. 430-450
- Print publication:
- July 2025
-
- Article
- Export citation
Madagascar’s environmental and human histories are dynamic, complex and deeply intertwined
-
- Journal:
- Environmental Conservation / Volume 52 / Issue 3 / September 2025
- Published online by Cambridge University Press:
- 01 July 2025, pp. 94-97
-
- Article
-
- You have access
- HTML
- Export citation
Ship path planning based on multi-factor and multi-scale A* algorithm
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 02 March 2026, pp. 451-460
- Print publication:
- July 2025
-
- Article
- Export citation
Spatiotemporal changes in district-level carbon emissions in India, 2019–2024
-
- Journal:
- Global Sustainability / Volume 8 / 2025
- Published online by Cambridge University Press:
- 01 July 2025, e21
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
NAV volume 78 issue 4-6 Cover and Front matter
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 11 May 2026, pp. f1-f2
- Print publication:
- July 2025
-
- Article
-
- You have access
- Export citation
How safe are the United Kingdom’s ports? A statistical analysis using accident data and AIS vessel movements
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 11 December 2025, pp. 403-429
- Print publication:
- July 2025
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Effect of lime on the cementitious properties of two soils rich in swelling clays: montmorillonite-rich bentonite and stevensite-rich bentonite
-
- Journal:
- Clay Minerals / Volume 60 / Issue 2 / June 2025
- Published online by Cambridge University Press:
- 01 July 2025, pp. 127-142
-
- Article
- Export citation
Estimating greenhouse gases using ship trajectory data
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 06 April 2026, pp. 461-473
- Print publication:
- July 2025
-
- Article
- Export citation
Advanced prediction of maritime vessel traffic flow using spatio-temporal multi-graph convolutional networks within inland waterways
-
- Journal:
- The Journal of Navigation / Volume 78 / Issue 4-6 / July 2025
- Published online by Cambridge University Press:
- 20 April 2026, pp. 493-518
- Print publication:
- July 2025
-
- Article
- Export citation
Editorial on carbon capture
-
- Journal:
- Cambridge Prisms: Carbon Technologies / Volume 1 / 2025
- Published online by Cambridge University Press:
- 30 June 2025, e1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Caustics of inertial particles observed along Lagrangian particle trajectories
-
- Journal:
- Journal of Fluid Mechanics / Volume 1014 / 10 July 2025
- Published online by Cambridge University Press:
- 30 June 2025, A13
-
- Article
- Export citation
-
We extend the perceived velocity gradient defined by a group of particles that was previously used to investigate the Lagrangian statistics of fluid turbulence to the study of inertial particle dynamics. Using data from direct numerical simulations, we observe the correlation between the strong compression in the particle phase and the instantaneous local fluid compression. Furthermore, the Lagrangian nature of the particle velocity gradient defined in this way allows an investigation of its evolution along particle trajectories, including the process after the caustic event, or the blow-up of the particle velocity gradient. Observations reveal that, for particles with Stokes number in the range
 $St \lesssim 1$, inertial particles experience the maximum compression by local fluid before the caustic event. Interestingly, data analyses show that, while the post-caustic process is mainly the relaxation of the particle motion and the particle relaxation time is the relevant time scale for the dynamics, the pre-caustic dynamics is controlled by the fluid–particle interaction and the proper time scale is determined by both the Kolmogorov time and the particle relaxation time.
$St \lesssim 1$, inertial particles experience the maximum compression by local fluid before the caustic event. Interestingly, data analyses show that, while the post-caustic process is mainly the relaxation of the particle motion and the particle relaxation time is the relevant time scale for the dynamics, the pre-caustic dynamics is controlled by the fluid–particle interaction and the proper time scale is determined by both the Kolmogorov time and the particle relaxation time.


Cross-wind-induced spanwise flapping of tandem turbulent diffusion flames: experimental- and large eddy simulation-based study
-
- Journal:
- Journal of Fluid Mechanics / Volume 1014 / 10 July 2025
- Published online by Cambridge University Press:
- 30 June 2025, A10
-
- Article
- Export citation
-
This research investigates the spanwise oscillation patterns of turbulent non-premixed flames in a tandem configuration, using both experimental methods and large eddy simulations under cross-airflow conditions. Based on the heat release rate (17.43–34.86 kW) and the burner size (0.15
 $\times$ 0.15 m), the flame behaves like both a buoyancy-controlled fire (such as a pool fire) and, due to cross-wind effects, a forced flow-controlled fire. The underlying fire dynamics was modelled by varying the spacing between the square diffusion burners, cross-wind velocity and heat release rate. Two flapping modes, the oscillating and bifurcating modes, were observed in the wake of the downstream diffusion flame. This behaviour depends on the wake of the upstream diffusion flame. As the backflow of the upstream flame moved downstream, the maximum flame width of the downstream flame became broader. The flapping amplitude decreased with a stronger cross-wind. Furthermore, the computational fluid dynamics simulation was performed by FireFOAM based on OpenFOAM v2006 2020 to investigate the flapping mechanism. The simulation captured both modes well. Disagreement of the flapping period on the left and right sides results in the oscillating mode, while an agreement of the flapping period results in the bifurcating mode. Finally, the scaling law expressed the dimensionless maximum flame width with the proposed set of basic dimensional parameters, following observations and interpretation by simulations. The results help prevent the potential hazards of this type of basic fire scenario and are fundamentally significant for studying wind-induced multiple fires.
$\times$ 0.15 m), the flame behaves like both a buoyancy-controlled fire (such as a pool fire) and, due to cross-wind effects, a forced flow-controlled fire. The underlying fire dynamics was modelled by varying the spacing between the square diffusion burners, cross-wind velocity and heat release rate. Two flapping modes, the oscillating and bifurcating modes, were observed in the wake of the downstream diffusion flame. This behaviour depends on the wake of the upstream diffusion flame. As the backflow of the upstream flame moved downstream, the maximum flame width of the downstream flame became broader. The flapping amplitude decreased with a stronger cross-wind. Furthermore, the computational fluid dynamics simulation was performed by FireFOAM based on OpenFOAM v2006 2020 to investigate the flapping mechanism. The simulation captured both modes well. Disagreement of the flapping period on the left and right sides results in the oscillating mode, while an agreement of the flapping period results in the bifurcating mode. Finally, the scaling law expressed the dimensionless maximum flame width with the proposed set of basic dimensional parameters, following observations and interpretation by simulations. The results help prevent the potential hazards of this type of basic fire scenario and are fundamentally significant for studying wind-induced multiple fires.


Spinning twisted ribbons: when two holes meet on a curved liquid film
-
- Journal:
- Journal of Fluid Mechanics / Volume 1014 / 10 July 2025
- Published online by Cambridge University Press:
- 30 June 2025, A11
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
The sub-seasonal and interannual spatio-temporal variability of bare-ice albedo of abramov glacier, Kyrgyzstan – CORRIGENDUM
-
- Journal:
- Journal of Glaciology / Volume 71 / 2025
- Published online by Cambridge University Press:
- 30 June 2025, e80
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
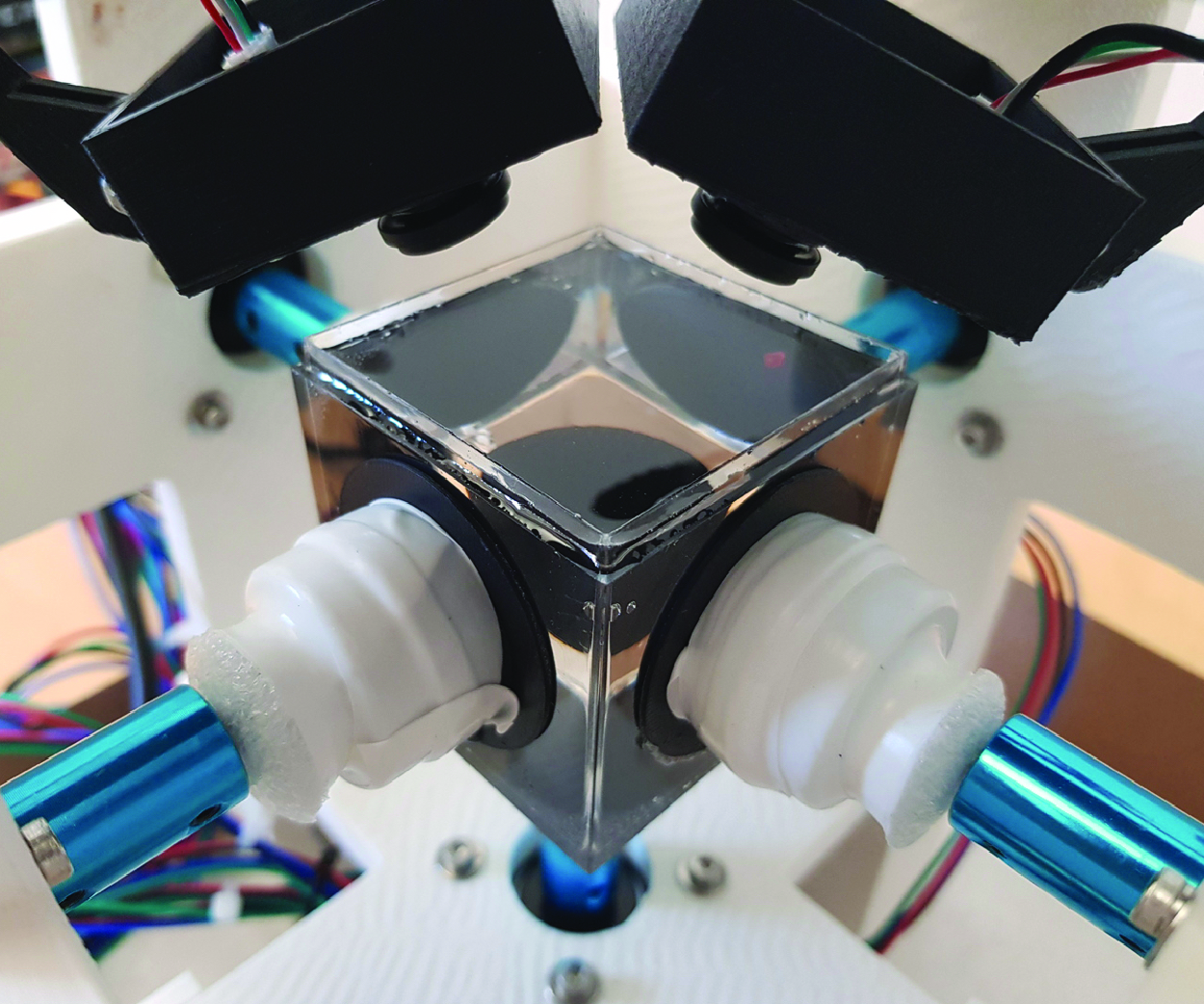
Contactless precision steering of particles in a fluid inside a cube with rotating walls
-
- Journal:
- Journal of Fluid Mechanics / Volume 1014 / 10 July 2025
- Published online by Cambridge University Press:
- 30 June 2025, A15
-
- Article
- Export citation

Why a strong global plastics treaty is essential for agricultural systems, food safety, food security and human health
- Part of
-
- Journal:
- Cambridge Prisms: Plastics / Volume 3 / 2025
- Published online by Cambridge University Press:
- 30 June 2025, e18
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
