Refine listing
Actions for selected content:
1416829 results in Open Access
“Wine”ing about blood culture bottles: using easy-to-follow visual cues to collect appropriate volumes
-
- Journal:
- Infection Control & Hospital Epidemiology / Volume 45 / Issue 7 / July 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 910-911
- Print publication:
- July 2024
-
- Article
-
- You have access
- HTML
- Export citation
A representation-learning approach for insurance pricing with images
-
- Journal:
- ASTIN Bulletin: The Journal of the IAA / Volume 54 / Issue 2 / May 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 280-309
- Print publication:
- May 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Not all consequences should be accepted: Letter to the Editor Reply to “Reportable infections following colon surgery in a large public healthcare system in New York City: the consequences of being a level 1 trauma center”
-
- Journal:
- Infection Control & Hospital Epidemiology / Volume 45 / Issue 7 / July 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 911-912
- Print publication:
- July 2024
-
- Article
-
- You have access
- HTML
- Export citation
Interorganizational Knowledge Transfer in Mass Gatherings: Exploring the Health and Safety Stakeholders’ Perceptions Participating in the Athens Marathon
-
- Journal:
- Prehospital and Disaster Medicine / Volume 39 / Issue 2 / April 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 163-169
- Print publication:
- April 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Approximate homomorphisms and sofic approximations of orbit equivalence relations
- Part of
-
- Journal:
- Ergodic Theory and Dynamical Systems / Volume 44 / Issue 12 / December 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 3455-3480
- Print publication:
- December 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
A Snapshot of Academic Job Placements in Linguistics in the US and Canada
-
- Journal:
- Canadian Journal of Linguistics/Revue canadienne de linguistique / Volume 69 / Issue 1 / March 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 129-143
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
An experimental evaluation of robot-stopping approaches for improving fluency in collaborative robotics
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Brian P. Cooper. Travel, Travel Writing, and British Political Economy: “Instructions for Travellers,” circa 1750–1850 London: Routledge, 2022. Pp. 347. $128.00 (cloth).
-
- Journal:
- Journal of British Studies / Volume 63 / Issue 2 / April 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 488-490
-
- Article
- Export citation
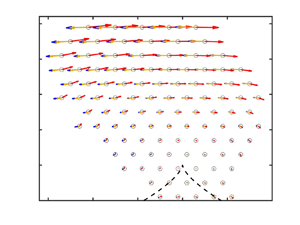
Structure and role of the pressure Hessian in regions of strong vorticity in turbulence
-
- Journal:
- Journal of Fluid Mechanics / Volume 983 / 25 March 2024
- Published online by Cambridge University Press:
- 15 March 2024, R2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
L2 to Lp bounds for spectral projectors on the Euclidean two-dimensional torus
- Part of
-
- Journal:
- Proceedings of the Edinburgh Mathematical Society / Volume 67 / Issue 2 / May 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 431-459
-
- Article
- Export citation
-
We consider spectral projectors associated to the Euclidean Laplacian on the two-dimensional torus, in the case where the spectral window is narrow. Bounds for their L2 to Lp operator norm are derived, extending the classical result of Sogge; a new question on the convolution kernel of the projector is introduced. The methods employed include
 $\ell^2$ decoupling, small cap decoupling and estimates of exponential sums.
$\ell^2$ decoupling, small cap decoupling and estimates of exponential sums.

Research methods for IDs and TBLT: A substantive and methodological review
-
- Journal:
- Studies in Second Language Acquisition / Volume 46 / Issue 3 / July 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 617-643
- Print publication:
- July 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
First sightings of mimic octopus Thaumoctopus mimicus (Cephalopoda: Octopodidia) from the Southwest Indian Ocean with photographic records from the Inhambane Province of southern Mozambique
-
- Journal:
- Journal of the Marine Biological Association of the United Kingdom / Volume 104 / 2024
- Published online by Cambridge University Press:
- 15 March 2024, e31
-
- Article
- Export citation
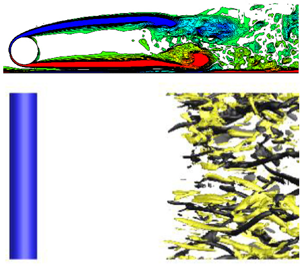
Turbulent wake characteristics for a circular cylinder in proximity to a moving wall
-
- Journal:
- Journal of Fluid Mechanics / Volume 983 / 25 March 2024
- Published online by Cambridge University Press:
- 15 March 2024, A18
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
This study investigates the scenario of flow past a circular cylinder in proximity to a moving wall (or equally a body translating in still fluid parallel to a stationary wall). Fifty high-fidelity three-dimensional direct numerical simulations are performed over a parameter space of turbulent Reynolds numbers (Re) of 300 to 1000 combined with gap-to-diameter ratios (G/D) of 0.2 to 3. The flow, hydrodynamic and turbulence characteristics over the (Re, G/D) parameter space are examined in detail. Small-scale rib-like mode B structures and alternate vortex shedding are observed for all cases. The streamwise location for the vortex shedding (quantified by the wake recirculation length Lr) varies strongly with both Re and G/D. The variation of Lr with Re and G/D can be explained by the spanwise circulation
 $\varGamma_z$ fed into the wake, where the variation trends of Lr and
$\varGamma_z$ fed into the wake, where the variation trends of Lr and  $\varGamma_z$ are inversely correlated. The variations of the mean drag and fluctuating lift coefficients are also governed by the variations in Lr and
$\varGamma_z$ are inversely correlated. The variations of the mean drag and fluctuating lift coefficients are also governed by the variations in Lr and  $\varGamma_z$. The total kinetic energy in the wake region reduces drastically as G/D reduces below 0.8, which is contributed collectively by (i) reduction in the strength of the shed vortices, (ii) downstream movement of the location of vortex shedding and (iii) associated delayed generation of streamwise vortices. The present results on a moving wall also help to explain several flow and hydrodynamic characteristics reported in the literature for a stationary wall, because the moving wall eliminates the complex wall boundary layer and retains a ‘clean’ near-wall effect.
$\varGamma_z$. The total kinetic energy in the wake region reduces drastically as G/D reduces below 0.8, which is contributed collectively by (i) reduction in the strength of the shed vortices, (ii) downstream movement of the location of vortex shedding and (iii) associated delayed generation of streamwise vortices. The present results on a moving wall also help to explain several flow and hydrodynamic characteristics reported in the literature for a stationary wall, because the moving wall eliminates the complex wall boundary layer and retains a ‘clean’ near-wall effect.



JSP volume 53 issue 2 Cover and Back matter
-
- Journal:
- Journal of Social Policy / Volume 53 / Issue 2 / April 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. b1-b2
- Print publication:
- April 2024
-
- Article
-
- You have access
- Export citation
Exploring the Alternatives to the Male-Breadwinner Model – The Implications for Social Policy Study
-
- Journal:
- Social Policy and Society / Volume 24 / Issue 1 / January 2025
- Published online by Cambridge University Press:
- 15 March 2024, pp. 6-15
- Print publication:
- January 2025
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
TILTING COMPLEXES AND CODIMENSION FUNCTIONS OVER COMMUTATIVE NOETHERIAN RINGS
- Part of
-
- Journal:
- Nagoya Mathematical Journal / Volume 255 / September 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 618-693
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Ethics Within the Divine Order – Why Oliveira’s Symmetry Challenge Fails
-
- Journal:
- New Blackfriars / Volume 105 / Issue 4 / July 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 416-427
- Print publication:
- July 2024
-
- Article
- Export citation
Eoin Bentick. Literatures of Alchemy in Medieval and Early Modern England Cambridge: D.S. Brewer, 2022. Pp. 228. $105.00 (cloth).
-
- Journal:
- Journal of British Studies / Volume 63 / Issue 2 / April 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. 433-434
-
- Article
- Export citation
JSP volume 53 issue 2 Cover and Front matter
-
- Journal:
- Journal of Social Policy / Volume 53 / Issue 2 / April 2024
- Published online by Cambridge University Press:
- 15 March 2024, pp. f1-f2
- Print publication:
- April 2024
-
- Article
-
- You have access
- Export citation
