Refine listing
Actions for selected content:
1418153 results in Open Access
The thrive for a new heritage ethos in Peru?: The Qhapaq Ñan’s policymaking and the ethics of community participation
-
- Journal:
- International Journal of Cultural Property / Volume 31 / Issue 3 / August 2024
- Published online by Cambridge University Press:
- 19 December 2024, pp. 278-298
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

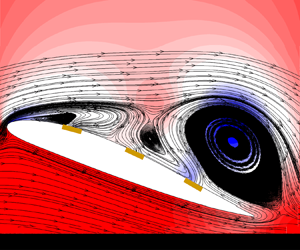
Internally heated convection with rotation: bounds on heat transport
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 19 December 2024, A55
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
This work investigates heat transport in rotating internally heated convection, for a horizontally periodic fluid between parallel plates under no-slip and isothermal boundary conditions. The main results are the proof of lower bounds on the mean temperature,
 $\overline {{\langle {T} \rangle }}$, and the heat flux out of the bottom boundary,
$\overline {{\langle {T} \rangle }}$, and the heat flux out of the bottom boundary,  ${\mathcal {F}}_B$, at infinite Prandtl number, where the Prandtl number is the non-dimensional ratio of viscous to thermal diffusion. The lower bounds are functions of the Rayleigh number quantifying the ratio of internal heating to diffusion and the Ekman number,
${\mathcal {F}}_B$, at infinite Prandtl number, where the Prandtl number is the non-dimensional ratio of viscous to thermal diffusion. The lower bounds are functions of the Rayleigh number quantifying the ratio of internal heating to diffusion and the Ekman number,  $E$, which quantifies the ratio of viscous diffusion to rotation. We utilise two different estimates on the vertical velocity,
$E$, which quantifies the ratio of viscous diffusion to rotation. We utilise two different estimates on the vertical velocity,  $w$, one pointwise in the domain (Yan, J. Math. Phys., vol. 45(7), 2004, pp. 2718–2743) and the other an integral estimate over the domain (Constantin et al., Phys. D: Non. Phen., vol. 125, 1999, pp. 275–284), resulting in bounds valid for different regions of buoyancy-to-rotation dominated convection. Furthermore, we demonstrate that similar to rotating Rayleigh–Bénard convection, for small
$w$, one pointwise in the domain (Yan, J. Math. Phys., vol. 45(7), 2004, pp. 2718–2743) and the other an integral estimate over the domain (Constantin et al., Phys. D: Non. Phen., vol. 125, 1999, pp. 275–284), resulting in bounds valid for different regions of buoyancy-to-rotation dominated convection. Furthermore, we demonstrate that similar to rotating Rayleigh–Bénard convection, for small  $E$, the critical Rayleigh number for the onset of convection asymptotically scales as
$E$, the critical Rayleigh number for the onset of convection asymptotically scales as  $E^{-4/3}$.
$E^{-4/3}$.






Disturbance observer-based fixed-time tracking control for space manipulators with parametric uncertainty and unknown disturbance
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1335 / May 2025
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1399-1420
-
- Article
- Export citation

Wave packets in laminar supersonic flow over an axisymmetric compression corner
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 19 December 2024, A54
-
- Article
- Export citation
Nomads, Territory, and the Kantian State
-
- Journal:
- Kantian Review , First View
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1-15
-
- Article
- Export citation
Understanding the gains from wage flexibility in a currency union: a fiscal policy connection
-
- Journal:
- Macroeconomic Dynamics / Volume 29 / 2025
- Published online by Cambridge University Press:
- 19 December 2024, e65
-
- Article
- Export citation
Morgan J. Robinson. A Language for the World: The Standardisation of Swahili. Ohio: Ohio University Press, 2022. 286pp. Notes. Bibliography. Index. $34.95. Paper. ISBN: 978-0-8214-2495-7.
-
- Journal:
- African Studies Review , First View
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1-2
-
- Article
-
- You have access
- HTML
- Export citation
Görkem Akgöz, In the Shadow of War and Empire: Industrialisation, Nation-Building, and Working-Class Politics in Turkey. Studies in the Social History of the Global South. Leiden: Brill, 2024. xvii + 374pp. 4 maps. 32 figures. 1 table. Bibliography and index. Open Access, €140.61 hbk. doi 10.1163/9789004687141
-
- Journal:
- Urban History / Volume 52 / Issue 1 / February 2025
- Published online by Cambridge University Press:
- 19 December 2024, pp. 221-222
-
- Article
- Export citation
Beamforming steering implementation using substrate-integrated waveguide Butler matrix and slotted array antenna for 5G n257 band
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 8 / October 2024
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1381-1396
-
- Article
- Export citation
Transformer-based in-context policy learning for efficient active flow control across various airfoils
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 19 December 2024, A53
-
- Article
- Export citation
Essay review: the fictive history of Victorian science and empire
-
- Journal:
- The British Journal for the History of Science / Volume 58 / Issue 1 / March 2025
- Published online by Cambridge University Press:
- 19 December 2024, pp. 133-135
- Print publication:
- March 2025
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Kirsten Moore-Sheeley, Nothing but Nets: A Biography of Global Health Science and Its Objects Baltimore: Johns Hopkins University Press, 2023. Pp. 248. ISBN 978-1-4214-4757-5. $49.95 (hardcover).
-
- Journal:
- The British Journal for the History of Science , First View
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1-2
-
- Article
-
- You have access
- HTML
- Export citation
Diversity and abundance of vultures in relation to seasonality, age, and habitat types in Mole National Park, Ghana
-
- Journal:
- Bird Conservation International / Volume 34 / 2024
- Published online by Cambridge University Press:
- 19 December 2024, e42
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Effects of a six-day, whole-diet sweet taste intervention on pleasantness, desire for and intakes of sweet foods: a randomised controlled trial
-
- Journal:
- British Journal of Nutrition / Volume 133 / Issue 2 / 28 January 2025
- Published online by Cambridge University Press:
- 19 December 2024, pp. 277-288
- Print publication:
- 28 January 2025
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Panagiotis Charitos, Theodore Arabatzis, Harry Cliff, Günther Dissertori, Juliette Forneris and Jason Li-Ying (eds.), Big Science in the 21st Century: Economic and Societal Impacts London: IOP Publishing Ltd, 2023. Pp. 928. ISBN 978-0-7503-3629-1. £120.00 (hardback).
-
- Journal:
- The British Journal for the History of Science , First View
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1-2
-
- Article
-
- You have access
- HTML
- Export citation
Children’s games and global politics: Masculinity, militarism, and the warrior hero
-
- Journal:
- Review of International Studies , First View
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1-18
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Optimisation of the geometry of axisymmetric point-absorber wave energy converters – CORRIGENDUM
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 19 December 2024, E1
-
- Article
-
- You have access
- HTML
- Export citation
Silencing the Press in Criminal Wars: Why the War on Drugs Turned Mexico into the World’s Most Dangerous Country for Journalists
-
- Journal:
- Perspectives on Politics , First View
- Published online by Cambridge University Press:
- 19 December 2024, pp. 1-22
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Breeding ecology of the globally threatened Aquatic Warbler Acrocephalus paludicola in calcareous fens at the south-western range limit
-
- Journal:
- Bird Conservation International / Volume 34 / 2024
- Published online by Cambridge University Press:
- 19 December 2024, e40
-
- Article
-
- You have access
- HTML
- Export citation
Pascale Appora-Gnekindy and Ningyi Sun, dirs. Eat Bitter. 2023. 96 minutes. Sango, Mandarin and French, with English subtitles. USA, Central African Republic and China. Key-Kwis Productions, OAZ Entertainment, Perpetuo Films and MJagger. No Price Reported. Available on Vimeo.
-
- Journal:
- African Studies Review / Volume 68 / Issue 1 / March 2025
- Published online by Cambridge University Press:
- 19 December 2024, pp. 218-219
-
- Article
-
- You have access
- HTML
- Export citation
