Refine listing
Actions for selected content:
1418502 results in Open Access

Freely rising or falling of a sphere in a square tube at intermediate Reynolds numbers
-
- Journal:
- Journal of Fluid Mechanics / Volume 1000 / 10 December 2024
- Published online by Cambridge University Press:
- 02 December 2024, A82
-
- Article
- Export citation
Post-COVID Mental Health Crises: Globally Minded for Solutions and Solidarity
-
- Journal:
- Disaster Medicine and Public Health Preparedness / Volume 18 / 2024
- Published online by Cambridge University Press:
- 02 December 2024, e295
-
- Article
- Export citation
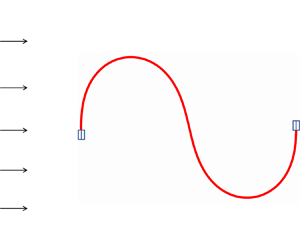
Flow-induced oscillations of an S-shaped buckled flexible filament
-
- Journal:
- Journal of Fluid Mechanics / Volume 1000 / 10 December 2024
- Published online by Cambridge University Press:
- 02 December 2024, A52
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Absent the Silently Invisible: Rethinking Model Victimhood under the “Comfort Women” System
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Understanding Older Adults’ Experiences with Cannabis for Medicinal Purposes: A Mixed Methods Study
-
- Journal:
- Canadian Journal on Aging / La Revue canadienne du vieillissement / Volume 44 / Issue 1 / March 2025
- Published online by Cambridge University Press:
- 02 December 2024, pp. 10-19
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Common and specific factors in psychological treatment of personality pathology
-
- Journal:
- BJPsych Advances / Volume 31 / Issue 4 / July 2025
- Published online by Cambridge University Press:
- 02 December 2024, pp. 228-236
- Print publication:
- July 2025
-
- Article
- Export citation
Emma Moore, Socio-syntax: Exploring the social life of grammar. Cambridge: Cambridge University Press, 2024. Pp. 256. ISBN 9781108843973.
-
- Journal:
- English Language & Linguistics , First View
- Published online by Cambridge University Press:
- 02 December 2024, pp. 1-6
-
- Article
- Export citation

Lift force on a spherical droplet in a viscous linear shear flow
-
- Journal:
- Journal of Fluid Mechanics / Volume 1000 / 10 December 2024
- Published online by Cambridge University Press:
- 02 December 2024, A88
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
We study numerically the flow around a spherical droplet set fixed in a linear shear flow with moderate shear rates (
 $Sr\leq 0.5$,
$Sr\leq 0.5$,  $Sr$ being the ratio between the velocity difference across the drop and the relative velocity) over a wide range of external Reynolds numbers (
$Sr$ being the ratio between the velocity difference across the drop and the relative velocity) over a wide range of external Reynolds numbers ( $0.1<{{Re}}\leq 250$,
$0.1<{{Re}}\leq 250$,  ${{Re}}$ based on the slip velocity and the viscosity of the external fluid) and drop-to-fluid viscosity ratios (
${{Re}}$ based on the slip velocity and the viscosity of the external fluid) and drop-to-fluid viscosity ratios ( $0.01\leq \mu ^\ast \leq 100$). The flow structure, the vorticity field and their intrinsic connection with the lift force are analysed. Specifically, the results on lift force are compared with the low-
$0.01\leq \mu ^\ast \leq 100$). The flow structure, the vorticity field and their intrinsic connection with the lift force are analysed. Specifically, the results on lift force are compared with the low- ${{Re}}$ solution derived for droplets of arbitrary
${{Re}}$ solution derived for droplets of arbitrary  $\mu ^\ast$, as well as prior data at finite
$\mu ^\ast$, as well as prior data at finite  ${{Re}}$ available in both the clean-bubble limit (
${{Re}}$ available in both the clean-bubble limit ( $\mu ^\ast \to 0$) and the solid-sphere limit (
$\mu ^\ast \to 0$) and the solid-sphere limit ( $\mu ^\ast \to \infty$). Notably, at
$\mu ^\ast \to \infty$). Notably, at  ${{Re}}=O(100)$, the lift force exhibits a non-monotonic transition from
${{Re}}=O(100)$, the lift force exhibits a non-monotonic transition from  $\mu ^\ast \to 0$ to
$\mu ^\ast \to 0$ to  $\mu ^\ast \to \infty$, peaking at
$\mu ^\ast \to \infty$, peaking at  $\mu ^\ast \approx 1$. This behaviour is related to an internal three-dimensional flow bifurcation also occurring under uniform-flow conditions, which makes the flow to evolve from axisymmetric to biplanar symmetric. This flow bifurcation occurs at low-but-finite
$\mu ^\ast \approx 1$. This behaviour is related to an internal three-dimensional flow bifurcation also occurring under uniform-flow conditions, which makes the flow to evolve from axisymmetric to biplanar symmetric. This flow bifurcation occurs at low-but-finite  $\mu ^\ast$ when the internal Reynolds number (
$\mu ^\ast$ when the internal Reynolds number ( ${{Re}}^i$, based on the viscosity of the internal fluid) exceeds approximately 300. In the presence of shear, the corresponding imperfect bifurcation enhances the extensional rate of the flow in the wake. Consequently, the streamwise vortices generated behind the droplet can be more intense compared with those behind a clean bubble. Given the close relation between the lift and these vortices, a droplet with
${{Re}}^i$, based on the viscosity of the internal fluid) exceeds approximately 300. In the presence of shear, the corresponding imperfect bifurcation enhances the extensional rate of the flow in the wake. Consequently, the streamwise vortices generated behind the droplet can be more intense compared with those behind a clean bubble. Given the close relation between the lift and these vortices, a droplet with  ${{Re}}=O(100)$ and
${{Re}}=O(100)$ and  $\mu ^\ast \approx 1$ typically experiences a greater lift force than that in the inviscid limit.
$\mu ^\ast \approx 1$ typically experiences a greater lift force than that in the inviscid limit.


















TDR volume 68 issue 4 Cover and Front matter
-
- Journal:
- TDR: The Drama Review / Volume 68 / Issue 4 / December 2024
- Published online by Cambridge University Press:
- 09 December 2024, pp. f1-f6
- Print publication:
- December 2024
-
- Article
-
- You have access
- Export citation
SOY volume 41 issue 2 Cover and Back matter
-
- Journal:
- Social Philosophy and Policy / Volume 41 / Issue 2 / Winter 2024
- Published online by Cambridge University Press:
- 06 February 2025, pp. b1-b3
- Print publication:
- Winter 2024
-
- Article
-
- You have access
- Export citation
JLO volume 138 issue 12 Cover and Back matter
-
- Journal:
- The Journal of Laryngology & Otology / Volume 138 / Issue 12 / December 2024
- Published online by Cambridge University Press:
- 15 January 2025, pp. b1-b2
- Print publication:
- December 2024
-
- Article
-
- You have access
- Export citation
Highly pathogenic avian influenza: considerations for healthcare settings
-
- Journal:
- Infection Control & Hospital Epidemiology / Volume 45 / Issue 12 / December 2024
- Published online by Cambridge University Press:
- 05 December 2024, pp. 1373-1377
- Print publication:
- December 2024
-
- Article
- Export citation
Vera Proskurina. The Imperial Script of Catherine the Great: Governing with a Literary Pen. Ars Rossica. Boston: Academic Studies Press, 2023. xix, 205 pp. Notes. Bibliography. Index. Hard bound.
-
- Journal:
- Slavic Review / Volume 83 / Issue 4 / Winter 2024
- Published online by Cambridge University Press:
- 02 June 2025, pp. 894-896
- Print publication:
- Winter 2024
-
- Article
- Export citation
Deutsche Freikorps. Sozialgeschichte und Kontinuitäten (para)militärischer Gewalt zwischen Weltkrieg, Revolution und Nationalsozialismus By Jan-Philipp Pomplun. Göttingen: Vandenhoeck & Ruprecht, 2023. Pp. 354. Hardcover €65.00. ISBN: 978-3525311462.
-
- Journal:
- Central European History / Volume 57 / Issue 4 / December 2024
- Published online by Cambridge University Press:
- 26 December 2024, pp. 573-574
- Print publication:
- December 2024
-
- Article
- Export citation
Beyond the Tragedy: Illuminating Challenges in Disaster Management and Mental Health Support in Resource-Constrained Environments
-
- Journal:
- Prehospital and Disaster Medicine / Volume 39 / Issue 6 / December 2024
- Published online by Cambridge University Press:
- 27 December 2024, pp. 442-444
- Print publication:
- December 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Constitutional Polarization: A Critical Review of the U.S. Political System. By Josep M. Colomer. London: Routledge, 2023. 156p. $48.95 paper.
-
- Journal:
- Perspectives on Politics / Volume 22 / Issue 4 / December 2024
- Published online by Cambridge University Press:
- 31 December 2024, pp. 1315-1317
- Print publication:
- December 2024
-
- Article
- Export citation
Visual Culture and Indigenous Agency in the Early Americas. Alessia Frassani, ed. The Early Americas: History and Culture 10. Leiden: Brill, 2022. xxiv + 256 pp. $142.
-
- Journal:
- Renaissance Quarterly / Volume 77 / Issue 4 / Winter 2024
- Published online by Cambridge University Press:
- 05 May 2025, pp. 1284-1285
- Print publication:
- Winter 2024
-
- Article
- Export citation
