Refine search
Actions for selected content:
212786 results in Engineering
Towards intermediate complexity modelling of contrail formation: the new dynamical framework RadMod
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1332 / February 2025
- Published online by Cambridge University Press:
- 11 December 2024, pp. 351-379
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Opposite effects of a reaction-driven viscosity decrease on miscible viscous fingering depending on the injection flow rate
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A25
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
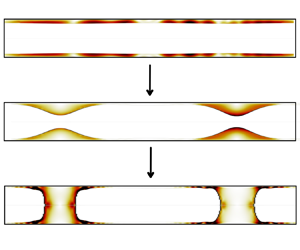
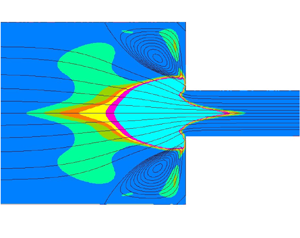
When a less-viscous solution of a reactant
 $A$ displaces a more-viscous solution of another reactant
$A$ displaces a more-viscous solution of another reactant  $B$, a fast bimolecular
$B$, a fast bimolecular  $A + B \rightarrow C$ reaction decreasing locally the viscosity can influence the viscous fingering (VF) instability taking place between the two miscible solutions. We show both experimentally and numerically that, for monotonic viscosity profiles, this decrease in viscosity has opposite effects on the fingering pattern depending on the injection flow rate. For high flow rates, the reaction enhances the shielding effect, creating VF patterns with a lower surface density, i.e. thinner fingers covering a smaller area. In contrast, for lower flow rates, the reaction stabilises the VF dynamics, i.e. delays the instability and gives a less-deformed displacement, reaching in some cases an almost-stable displacement. Nonlinear simulations of reactive VF show that these opposite effects at low or high flow rates can only be reproduced if the diffusivity of
$A + B \rightarrow C$ reaction decreasing locally the viscosity can influence the viscous fingering (VF) instability taking place between the two miscible solutions. We show both experimentally and numerically that, for monotonic viscosity profiles, this decrease in viscosity has opposite effects on the fingering pattern depending on the injection flow rate. For high flow rates, the reaction enhances the shielding effect, creating VF patterns with a lower surface density, i.e. thinner fingers covering a smaller area. In contrast, for lower flow rates, the reaction stabilises the VF dynamics, i.e. delays the instability and gives a less-deformed displacement, reaching in some cases an almost-stable displacement. Nonlinear simulations of reactive VF show that these opposite effects at low or high flow rates can only be reproduced if the diffusivity of  $A$ is larger than that of
$A$ is larger than that of  $B$, which favours a larger production of the product
$B$, which favours a larger production of the product  $C$ and, hence, a larger viscosity decrease. The analysis of one-dimensional viscosity profiles reconstructed on the basis of a one-dimensional reaction–diffusion–advection model confirms that the VF stabilisation at low Péclet number and in the presence of differential diffusion of reactants originates from an optimum reaction-driven decrease in the gradient of the monotonic viscosity profile.
$C$ and, hence, a larger viscosity decrease. The analysis of one-dimensional viscosity profiles reconstructed on the basis of a one-dimensional reaction–diffusion–advection model confirms that the VF stabilisation at low Péclet number and in the presence of differential diffusion of reactants originates from an optimum reaction-driven decrease in the gradient of the monotonic viscosity profile.







Waves and non-propagating modes in stratified MHD turbulence subject to a weak mean magnetic field
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A28
-
- Article
- Export citation
-
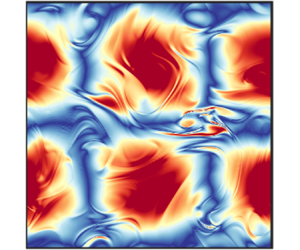
In this study we consider a freely decaying, stably stratified homogeneous magnetohydrodynamic turbulent plasma with a weak vertical background magnetic field (
 $\boldsymbol {B}_0=B_0\hat {\boldsymbol {z}}),$ aligned with the density gradient of strength
$\boldsymbol {B}_0=B_0\hat {\boldsymbol {z}}),$ aligned with the density gradient of strength  $N$ (i.e. Brunt–Väisälä frequency). Both linear theory and direct numerical simulations (DNS) are used to analyse the flow dynamics for a Boussinesq fluid with unitary magnetic and thermal Prandtl numbers. We implemented a normal mode decomposition emphasizing different types of motions depending on whether both the Froude
$N$ (i.e. Brunt–Väisälä frequency). Both linear theory and direct numerical simulations (DNS) are used to analyse the flow dynamics for a Boussinesq fluid with unitary magnetic and thermal Prandtl numbers. We implemented a normal mode decomposition emphasizing different types of motions depending on whether both the Froude  $F_r$ and Alfvén–Mach
$F_r$ and Alfvén–Mach  $M$ numbers are small or only
$M$ numbers are small or only  $F_r$ is small but
$F_r$ is small but  $M$ is finite. In the former case, there is a non-propagating (NP) mode and fast modes: Alfvén waves with frequency
$M$ is finite. In the former case, there is a non-propagating (NP) mode and fast modes: Alfvén waves with frequency  $\omega _a$ and magnetogravity waves with frequency
$\omega _a$ and magnetogravity waves with frequency  $\omega _{ag}$. In the latter case, there are fast gravity waves with frequency
$\omega _{ag}$. In the latter case, there are fast gravity waves with frequency  $\omega _g$ and slow modes: NP mode and slow Alfvén waves. The numerical simulations carried out are started from initial isotropic conditions with zero initial magnetic and density fluctuations, so that the initial energy of the NP mode is strictly zero, for
$\omega _g$ and slow modes: NP mode and slow Alfvén waves. The numerical simulations carried out are started from initial isotropic conditions with zero initial magnetic and density fluctuations, so that the initial energy of the NP mode is strictly zero, for  $0< B_0/(L_iN)\leqslant 0.12$ and a weak mean magnetic field (
$0< B_0/(L_iN)\leqslant 0.12$ and a weak mean magnetic field ( $B_0=0.2$ or
$B_0=0.2$ or  $B_0=0.4),$ where
$B_0=0.4),$ where  $L_i$ denotes the isotropic integral length scale. The DNS results indicate a weak turbulence regime for which
$L_i$ denotes the isotropic integral length scale. The DNS results indicate a weak turbulence regime for which  $F_r$ is small and
$F_r$ is small and  $M$ is finite. It is found that the vertical magnetic energy as well as the energy of the NP mode are drastically reduced as
$M$ is finite. It is found that the vertical magnetic energy as well as the energy of the NP mode are drastically reduced as  $N$ increases, while there is instead a forward cascade even for the magnetic field. The contribution coming from the energy of fast (gravity) waves does not exceed
$N$ increases, while there is instead a forward cascade even for the magnetic field. The contribution coming from the energy of fast (gravity) waves does not exceed  $50\,\%,$ while that coming from the energy of the NP mode does not exceed
$50\,\%,$ while that coming from the energy of the NP mode does not exceed  $10\,\%.$ Vertical motions are more affected by the effect of stratification than by the effect of the mean magnetic field, while it is the opposite for horizontal motions. We show that the spectrum of slow (Alfvén) waves and fast (gravity) waves tends to follow the power law
$10\,\%.$ Vertical motions are more affected by the effect of stratification than by the effect of the mean magnetic field, while it is the opposite for horizontal motions. We show that the spectrum of slow (Alfvén) waves and fast (gravity) waves tends to follow the power law  $k_\perp ^{-3}$ for a wide range of time,
$k_\perp ^{-3}$ for a wide range of time,  $3< t<20$. At high vertical (or horizontal) wavenumbers, the main contribution to total energy comes from the energy of slow Alfvén waves. At large and intermediate horizontal (or vertical) scales, the spectra of the energy of NP mode exhibit a flat shape.
$3< t<20$. At high vertical (or horizontal) wavenumbers, the main contribution to total energy comes from the energy of slow Alfvén waves. At large and intermediate horizontal (or vertical) scales, the spectra of the energy of NP mode exhibit a flat shape.




















CFD modelling of micro turbomachinery blade: integrating surface roughness with novel reverse-engineering strategies
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1334 / April 2025
- Published online by Cambridge University Press:
- 11 December 2024, pp. 1028-1053
-
- Article
- Export citation
Unsteady motion of nearly spherical particles in viscous fluids: a second-order asymptotic theory
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A23
-
- Article
- Export citation
-
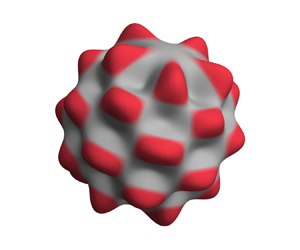
The motion of small non-spherical particles is often studied using the unsteady Stokes equations. Zhang & Stone (J. Fluid Mech., vol. 367, 1998, pp. 329–358) reported an asymptotic treatment for nearly spherical particles, to first order in particle non-sphericity, i.e.
 $O(\epsilon )$, where
$O(\epsilon )$, where  $\epsilon$ quantifies the shape deviation from a sphere. Importantly, key physical phenomena are absent at
$\epsilon$ quantifies the shape deviation from a sphere. Importantly, key physical phenomena are absent at  $O(\epsilon )$, including (1) coupling between the torque experienced by the particle and its linear translation, (2) coupling between the force the particle experiences and its rotation and (3) the effect of non-sphericity on the orientation averages of these forces and torques. We present an explicit asymptotic theory to second order in particle non-sphericity, i.e.
$O(\epsilon )$, including (1) coupling between the torque experienced by the particle and its linear translation, (2) coupling between the force the particle experiences and its rotation and (3) the effect of non-sphericity on the orientation averages of these forces and torques. We present an explicit asymptotic theory to second order in particle non-sphericity, i.e.  $O(\epsilon ^2)$, for the force and torque acting on a particle in a general unsteady Stokes flow. The derived analytical formulae apply to particles of arbitrary shape, providing the leading-order asymptotic theory for the three above-mentioned phenomena. The theory is demonstrated for several example nearly spherical particles including a spheroid, a ‘pear-shaped’ particle and a simple model for a SARS-CoV-2 virion. This includes formulae for force and torque as a function of particle orientation and their corresponding orientation averages. Our study reveals that the orientation-averaged forces and torques experienced by a nearly spherical particle cannot be generally represented by a perfect sphere. The reported formulae are validated using finite-amplitude three-dimensional direct numerical simulations of the Navier–Stokes equations. A Mathematica notebook is also provided, facilitating implementation of the theory for particle shapes of the user's choosing.
$O(\epsilon ^2)$, for the force and torque acting on a particle in a general unsteady Stokes flow. The derived analytical formulae apply to particles of arbitrary shape, providing the leading-order asymptotic theory for the three above-mentioned phenomena. The theory is demonstrated for several example nearly spherical particles including a spheroid, a ‘pear-shaped’ particle and a simple model for a SARS-CoV-2 virion. This includes formulae for force and torque as a function of particle orientation and their corresponding orientation averages. Our study reveals that the orientation-averaged forces and torques experienced by a nearly spherical particle cannot be generally represented by a perfect sphere. The reported formulae are validated using finite-amplitude three-dimensional direct numerical simulations of the Navier–Stokes equations. A Mathematica notebook is also provided, facilitating implementation of the theory for particle shapes of the user's choosing.




Influence of three-dimensionality on wake synchronisation of an oscillatory cylinder
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A24
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
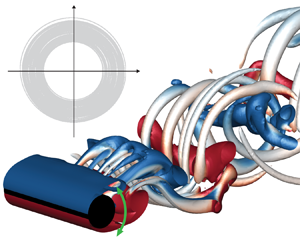
We investigate the effect of three-dimensionality on the synchronisation characteristics of the wake behind an oscillating circular cylinder at
 ${\textit {Re}} = 300$. Cylinder oscillations in rotation, transverse translation and streamwise translation are considered. We utilise phase-reduction analysis, which quantifies the phase-sensitivity function of periodic flows, to examine the synchronisation properties. Here, we present an ensemble-based framework for phase-reduction analysis to handle three-dimensional wakes that are not perfectly time-periodic. Based on the phase-sensitivity functions, synchronisability to three types of cylinder oscillations is evaluated. In spite of similar trends, we find that phase-sensitivity functions involving three-dimensional wakes are lower in magnitude compared with those of two-dimensional wakes, which leads to narrower conditions for synchronisation to weak cylinder oscillations. We unveil that the difference between the phase-sensitivity functions of two- and three-dimensional flows is strongly correlated to the amplitude variation of the three-dimensional flow by the cylinder motions. This finding reveals that the cylinder motion modifies the three-dimensionality of the wake as well as the phase of vortex shedding, which leads to reduced phase modulation. The synchronisation conditions of three-dimensional wakes, predicted by phase-reduction analysis, agree with the identification by parametric studies using direct numerical simulations for forced oscillations with small amplitudes. This study presents the potential capability of phase-reduction to study synchronisation characteristics of complex flows.
${\textit {Re}} = 300$. Cylinder oscillations in rotation, transverse translation and streamwise translation are considered. We utilise phase-reduction analysis, which quantifies the phase-sensitivity function of periodic flows, to examine the synchronisation properties. Here, we present an ensemble-based framework for phase-reduction analysis to handle three-dimensional wakes that are not perfectly time-periodic. Based on the phase-sensitivity functions, synchronisability to three types of cylinder oscillations is evaluated. In spite of similar trends, we find that phase-sensitivity functions involving three-dimensional wakes are lower in magnitude compared with those of two-dimensional wakes, which leads to narrower conditions for synchronisation to weak cylinder oscillations. We unveil that the difference between the phase-sensitivity functions of two- and three-dimensional flows is strongly correlated to the amplitude variation of the three-dimensional flow by the cylinder motions. This finding reveals that the cylinder motion modifies the three-dimensionality of the wake as well as the phase of vortex shedding, which leads to reduced phase modulation. The synchronisation conditions of three-dimensional wakes, predicted by phase-reduction analysis, agree with the identification by parametric studies using direct numerical simulations for forced oscillations with small amplitudes. This study presents the potential capability of phase-reduction to study synchronisation characteristics of complex flows.


The wind-shade roughness model for turbulent wall-bounded flows
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Friction and heat transfer in forced air convection with variable physical properties
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A27
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
We establish a theoretical framework for predicting friction and heat transfer coefficients in variable-property forced air convection. Drawing from concepts in high-speed wall turbulence, which also involves significant temperature, viscosity and density variations, we utilize the mean momentum balance and mean thermal balance equations to develop integral transformations that account for the impact of variable fluid properties. These transformations are then applied inversely to predict the friction and heat transfer coefficients, leveraging the universality of passive scalars transport theory. Our proposed approach is validated using a comprehensive dataset from direct numerical simulations (DNS), covering both heating and cooling conditions up to a friction Reynolds number
 $\textit {Re}_\tau \approx 3200$. The predicted friction and heat transfer coefficients closely match the DNS data with accuracy margin 1–2 %, representing a significant improvement over the current state of the art.
$\textit {Re}_\tau \approx 3200$. The predicted friction and heat transfer coefficients closely match the DNS data with accuracy margin 1–2 %, representing a significant improvement over the current state of the art.

Design and simulation of high temperature rise triple-swirler combustor
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1335 / May 2025
- Published online by Cambridge University Press:
- 11 December 2024, pp. 1320-1360
-
- Article
- Export citation
Time-dependent low-rank input–output operator for forced linearized dynamics with unsteady base flows
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A22
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Bubble shape oscillations in a turbulent environment
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A26
-
- Article
- Export citation
-
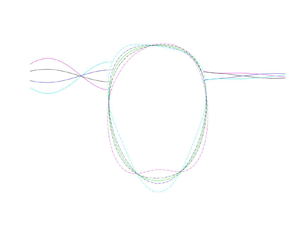
We study single bubble deformation statistics in an homogeneous and isotropic turbulent flow by means of direct numerical simulations. We consider bubbles at low Weber number (
 $We <3$) that have not been broken. We show that we can reproduce bubble deformations with a linear dynamics for each spherical harmonic mode. Inferring the coefficients of the linear model from the DNS data, we find that the natural frequency corresponds to the Rayleigh frequency, derived in a quiescent flow. However, the effective damping increases by a factor 7 compared with the quiescent case, at Taylor Reynolds number
$We <3$) that have not been broken. We show that we can reproduce bubble deformations with a linear dynamics for each spherical harmonic mode. Inferring the coefficients of the linear model from the DNS data, we find that the natural frequency corresponds to the Rayleigh frequency, derived in a quiescent flow. However, the effective damping increases by a factor 7 compared with the quiescent case, at Taylor Reynolds number  $\textit {Re}_\lambda = 55$. Looking at the flow structure around the bubble, we argue that the enhanced damping originates from a thick boundary layer surrounding the bubble. We demonstrate that the effective forcing, originating from the turbulent flow forcing on the bubble surface, is independent of bubble deformability. Therefore, the interface deformations are only one-way coupled to the flow. From this model we conclude that bubbles break rather from turbulent fluctuations than from a resonant mechanism. Eventually, we investigate the pressure modes’ statistics in the absence of bubbles and compare them with the effective forcing statistics. We show that both fields share the same probability distribution function, characterized by exponential tails, and a characteristic time scale corresponding to the eddy turnover time at the mode scale.
$\textit {Re}_\lambda = 55$. Looking at the flow structure around the bubble, we argue that the enhanced damping originates from a thick boundary layer surrounding the bubble. We demonstrate that the effective forcing, originating from the turbulent flow forcing on the bubble surface, is independent of bubble deformability. Therefore, the interface deformations are only one-way coupled to the flow. From this model we conclude that bubbles break rather from turbulent fluctuations than from a resonant mechanism. Eventually, we investigate the pressure modes’ statistics in the absence of bubbles and compare them with the effective forcing statistics. We show that both fields share the same probability distribution function, characterized by exponential tails, and a characteristic time scale corresponding to the eddy turnover time at the mode scale.


A novel dual-band absorber for millimeter-wave RADAR applications
-
- Journal:
- International Journal of Microwave and Wireless Technologies / Volume 16 / Issue 7 / September 2024
- Published online by Cambridge University Press:
- 11 December 2024, pp. 1173-1180
-
- Article
- Export citation
Hydrodynamic performance of a floating fluid-filled membrane breakwater: experimental and numerical study
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A21
-
- Article
- Export citation
Plateau–Rayleigh instability in a capillary: assessing the importance of inertia
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 11 December 2024, A15
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
A shear and elongational decomposition approach of the rate-of-deformation tensor for non-Newtonian flows with mixed kinematics
-
- Journal:
- Journal of Fluid Mechanics / Volume 1001 / 25 December 2024
- Published online by Cambridge University Press:
- 10 December 2024, A17
-
- Article
- Export citation
A 100 W-level ultra-narrow fiber-coupled 780 nm diode laser
-
- Journal:
- High Power Laser Science and Engineering / Volume 12 / 2024
- Published online by Cambridge University Press:
- 10 December 2024, e73
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Design, modeling, and preliminary evaluation of a simple wrist-hand stretching orthosis for neurologically impaired patients
-
- Journal:
- Wearable Technologies / Volume 5 / 2024
- Published online by Cambridge University Press:
- 10 December 2024, e19
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Novel neuromuscular controllers with simplified muscle model and enhanced reflex modulation: A comparative study in hip exoskeletons
-
- Journal:
- Wearable Technologies / Volume 5 / 2024
- Published online by Cambridge University Press:
- 10 December 2024, e21
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Sensorless model-based tension control for a cable-driven exosuit
-
- Journal:
- Wearable Technologies / Volume 5 / 2024
- Published online by Cambridge University Press:
- 10 December 2024, e22
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Viscous damping of tremor using a wearable robot with an optimized mechanical metamaterial
-
- Journal:
- Wearable Technologies / Volume 5 / 2024
- Published online by Cambridge University Press:
- 10 December 2024, e20
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
