Refine listing
Actions for selected content:
1419104 results in Open Access
Elizabeth A. Foster. African Catholic: Decolonization and the Transformation of the Church. Boston: Harvard University Press, 2019. 369 pp. Photos. Maps. Tables. Bibliography. Index. $49.00. Cloth. ISBN: 9780674987661.
-
- Journal:
- African Studies Review / Volume 67 / Issue 2 / June 2024
- Published online by Cambridge University Press:
- 29 February 2024, pp. 477-479
-
- Article
-
- You have access
- HTML
- Export citation
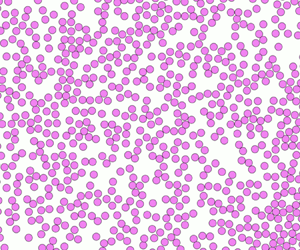
Investigation of near-wall particle statistics in CFD-DEM simulations of dense fluidised beds and derivation of an Eulerian particle dynamic wall boundary condition
-
- Journal:
- Journal of Fluid Mechanics / Volume 982 / 10 March 2024
- Published online by Cambridge University Press:
- 29 February 2024, A2
-
- Article
- Export citation
A NOTE ON PROJECTIONS IN ÉTALE GROUPOID ALGEBRAS AND DIAGONAL-PRESERVING HOMOMORPHISMS
- Part of
-
- Journal:
- Bulletin of the Australian Mathematical Society / Volume 110 / Issue 3 / December 2024
- Published online by Cambridge University Press:
- 29 February 2024, pp. 508-513
- Print publication:
- December 2024
-
- Article
- Export citation
-
Carlsen [‘
 $\ast $-isomorphism of Leavitt path algebras over
$\ast $-isomorphism of Leavitt path algebras over  $\Bbb Z$’, Adv. Math. 324 (2018), 326–335] showed that any
$\Bbb Z$’, Adv. Math. 324 (2018), 326–335] showed that any  $\ast $-homomorphism between Leavitt path algebras over
$\ast $-homomorphism between Leavitt path algebras over  $\mathbb Z$ is automatically diagonal preserving and hence induces an isomorphism of boundary path groupoids. His result works over conjugation-closed subrings of
$\mathbb Z$ is automatically diagonal preserving and hence induces an isomorphism of boundary path groupoids. His result works over conjugation-closed subrings of  $\mathbb C$ enjoying certain properties. In this paper, we characterise the rings considered by Carlsen as precisely those rings for which every
$\mathbb C$ enjoying certain properties. In this paper, we characterise the rings considered by Carlsen as precisely those rings for which every  $\ast $-homomorphism of algebras of Hausdorff ample groupoids is automatically diagonal preserving. Moreover, the more general groupoid result has a simpler proof.
$\ast $-homomorphism of algebras of Hausdorff ample groupoids is automatically diagonal preserving. Moreover, the more general groupoid result has a simpler proof.






Growing trends in conceptualizing geriatric mental health within a neural context: Commentary on “Anxiety in Late-Life Depression: Associations with Brain Volume, Amyloid Beta, White Matter Lesions, Cognition, and Functional Ability” by Kryza-Lacombe et al.
-
- Journal:
- International Psychogeriatrics / Volume 36 / Issue 11 / November 2024
- Published online by Cambridge University Press:
- 29 February 2024, pp. 991-994
-
- Article
- Export citation
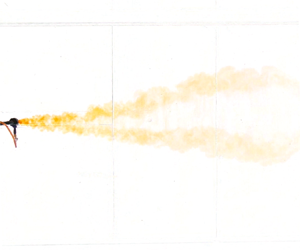
The dynamics of impinging plumes from a moving source
-
- Journal:
- Journal of Fluid Mechanics / Volume 982 / 10 March 2024
- Published online by Cambridge University Press:
- 29 February 2024, A6
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
We present the results from a series of experiments investigating the dynamics of gravity currents which form when a dense saline or particle-laden plume issuing from a moving source interacts with a horizontal surface. We define the dimensionless parameter
 $P$ as the ratio of the source speed,
$P$ as the ratio of the source speed,  $u_a$, to the buoyancy speed,
$u_a$, to the buoyancy speed,  $(B_0/z_0)^{1/3}$, where
$(B_0/z_0)^{1/3}$, where  $B_0$ and
$B_0$ and  $z_0$ are the source buoyancy flux and height above the horizontal surface, respectively. Using our experimental data, we determine that the limiting case in which
$z_0$ are the source buoyancy flux and height above the horizontal surface, respectively. Using our experimental data, we determine that the limiting case in which  $P=P_c$ the gravity current only spreads downstream of the initial impact point occurs when
$P=P_c$ the gravity current only spreads downstream of the initial impact point occurs when  $P_c=0.83\pm 0.02$. For
$P_c=0.83\pm 0.02$. For  $P< P_c$, from our experiments we observe that the plume forms a gravity current that spreads out in all directions from the point of impact and the propagation of the gravity current is analogous to a classical constant-flux gravity current. For
$P< P_c$, from our experiments we observe that the plume forms a gravity current that spreads out in all directions from the point of impact and the propagation of the gravity current is analogous to a classical constant-flux gravity current. For  $P>P_c$, we observe that the descending plume is bent over and develops a pair of counter-rotating line vortices along the axis of the plume. The ensuing gravity current spreads out downstream of the source, normal to the motion of the source. Analogous processes occur with particle-laden plumes, but there is a second dimensionless parameter
$P>P_c$, we observe that the descending plume is bent over and develops a pair of counter-rotating line vortices along the axis of the plume. The ensuing gravity current spreads out downstream of the source, normal to the motion of the source. Analogous processes occur with particle-laden plumes, but there is a second dimensionless parameter  $S$, the ratio of the particle fall speed,
$S$, the ratio of the particle fall speed,  $v_s$, to the vertical speed of a plume in a crossflow,
$v_s$, to the vertical speed of a plume in a crossflow,  $(B_0/u_a z_0)^{1/2}$. For
$(B_0/u_a z_0)^{1/2}$. For  $S\ll 1$, particles remain well mixed in the plume and a particle-driven gravity current develops. For
$S\ll 1$, particles remain well mixed in the plume and a particle-driven gravity current develops. For  $S\gg 1$, particles separate from the plume prior to impacting the boundary which leads to a fall deposit and no gravity current. We discuss these results in the context of deep-sea mining.
$S\gg 1$, particles separate from the plume prior to impacting the boundary which leads to a fall deposit and no gravity current. We discuss these results in the context of deep-sea mining.














Hausdorff operators on some classical spaces of analytic functions
- Part of
-
- Journal:
- Canadian Mathematical Bulletin / Volume 67 / Issue 3 / September 2024
- Published online by Cambridge University Press:
- 29 February 2024, pp. 768-780
- Print publication:
- September 2024
-
- Article
- Export citation
-
In this note, we start on the study of the sufficient conditions for the boundedness of Hausdorff operators
on three important function spaces (i.e., derivative Hardy spaces, weighted Dirichlet spaces, and Bloch type spaces), which is a continuation of the previous works of Mirotin et al. Here, $$ \begin{align*}(\mathcal{H}_{K,\mu}f)(z):=\int_{\mathbb{D}}K(w)f(\sigma_w(z))d\mu(w)\end{align*} $$
$$ \begin{align*}(\mathcal{H}_{K,\mu}f)(z):=\int_{\mathbb{D}}K(w)f(\sigma_w(z))d\mu(w)\end{align*} $$ $\mu $ is a positive Radon measure, K is a
$\mu $ is a positive Radon measure, K is a  $\mu $-measurable function on the open unit disk
$\mu $-measurable function on the open unit disk  $\mathbb {D}$, and
$\mathbb {D}$, and  $\sigma _w(z)$ is the classical Möbius transform of
$\sigma _w(z)$ is the classical Möbius transform of  $\mathbb {D}$.
$\mathbb {D}$.






Unionization, industry concentration, and economic growth
-
- Journal:
- Macroeconomic Dynamics / Volume 29 / 2025
- Published online by Cambridge University Press:
- 29 February 2024, e3
-
- Article
- Export citation
Judge Ideology and Opportunistic Insider Trading
-
- Journal:
- Journal of Financial and Quantitative Analysis / Volume 60 / Issue 4 / June 2025
- Published online by Cambridge University Press:
- 29 February 2024, pp. 1656-1685
- Print publication:
- June 2025
-
- Article
-
- You have access
- Open access
- Export citation
Edward Stourton, Sunday: A History of Religious Affairs through 50 Years of Conversations and Controversies, SPCK/BBC 2023.
-
- Journal:
- Journal of Anglican Studies / Volume 23 / Issue 1 / May 2025
- Published online by Cambridge University Press:
- 29 February 2024, pp. 250-251
-
- Article
- Export citation
Economic hardship and adolescent behavioral outcomes: Within- and between-family associations – CORRIGENDUM
-
- Journal:
- Development and Psychopathology / Volume 37 / Issue 1 / February 2025
- Published online by Cambridge University Press:
- 29 February 2024, p. 541
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
ARROW’S THEOREM, ULTRAFILTERS, AND REVERSE MATHEMATICS
- Part of
-
- Journal:
- The Review of Symbolic Logic / Volume 18 / Issue 2 / June 2025
- Published online by Cambridge University Press:
- 29 February 2024, pp. 439-462
- Print publication:
- June 2025
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
This paper initiates the reverse mathematics of social choice theory, studying Arrow’s impossibility theorem and related results including Fishburn’s possibility theorem and the Kirman–Sondermann theorem within the framework of reverse mathematics. We formalise fundamental notions of social choice theory in second-order arithmetic, yielding a definition of countable society which is tractable in
 ${\mathsf {RCA}}_0$. We then show that the Kirman–Sondermann analysis of social welfare functions can be carried out in
${\mathsf {RCA}}_0$. We then show that the Kirman–Sondermann analysis of social welfare functions can be carried out in  ${\mathsf {RCA}}_0$. This approach yields a proof of Arrow’s theorem in
${\mathsf {RCA}}_0$. This approach yields a proof of Arrow’s theorem in  ${\mathsf {RCA}}_0$, and thus in
${\mathsf {RCA}}_0$, and thus in  $\mathrm {PRA}$, since Arrow’s theorem can be formalised as a
$\mathrm {PRA}$, since Arrow’s theorem can be formalised as a  $\Pi ^0_1$ sentence. Finally we show that Fishburn’s possibility theorem for countable societies is equivalent to
$\Pi ^0_1$ sentence. Finally we show that Fishburn’s possibility theorem for countable societies is equivalent to  ${\mathsf {ACA}}_0$ over
${\mathsf {ACA}}_0$ over  ${\mathsf {RCA}}_0$.
${\mathsf {RCA}}_0$.







Thomas Aquinas on Non-Theological Faith
-
- Journal:
- New Blackfriars / Volume 105 / Issue 5 / September 2024
- Published online by Cambridge University Press:
- 29 February 2024, pp. 478-491
- Print publication:
- September 2024
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
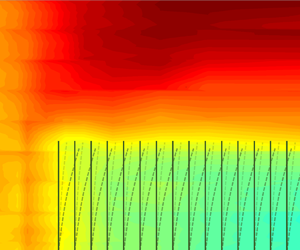
A simple prediction of time-mean and wave orbital velocities in submerged canopy
-
- Journal:
- Journal of Fluid Mechanics / Volume 982 / 10 March 2024
- Published online by Cambridge University Press:
- 29 February 2024, A3
-
- Article
- Export citation
Eldercare Issues in China and India Longtao He and Jagriti Gangopadhyay (eds), Routledge, London, 2022, 250 pp., hbk £104.00, ISBN 13: 9781032183794
-
- Journal:
- Ageing & Society / Volume 44 / Issue 9 / September 2024
- Published online by Cambridge University Press:
- 28 February 2024, pp. 2135-2136
- Print publication:
- September 2024
-
- Article
- Export citation
Low-Temperature Acid Weathering in Newhaven, Sussex, United Kingdom, and Its Application to Theoretical Modeling in Radioactive Waste-Disposal Sites
-
- Journal:
- Clays and Clay Minerals / Volume 48 / Issue 2 / April 2000
- Published online by Cambridge University Press:
- 28 February 2024, pp. 238-245
-
- Article
- Export citation
Iron Oxide-Clay Mineral Association in Brazilian Oxisols: A Magnetic Separation Study
-
- Journal:
- Clays and Clay Minerals / Volume 40 / Issue 2 / April 1992
- Published online by Cambridge University Press:
- 28 February 2024, pp. 175-179
-
- Article
- Export citation
Experimental Determination of the Rates of Precipitation of Authigenic Illite and Kaolinite in the Presence of Aqueous Oxalate and Comparison to the K/Ar Ages of Authigenic Illite in Reservoir Sandstones
-
- Journal:
- Clays and Clay Minerals / Volume 41 / Issue 2 / April 1993
- Published online by Cambridge University Press:
- 28 February 2024, pp. 191-208
-
- Article
- Export citation
Low-Charge to High-Charge Beidellite Conversion in a Vertisol from South Italy
-
- Journal:
- Clays and Clay Minerals / Volume 43 / Issue 4 / August 1995
- Published online by Cambridge University Press:
- 28 February 2024, pp. 495-502
-
- Article
- Export citation
Overcrowding in the Dispatching Centre During the COVID-19 Crisis: Are Medical Students a Resource?
-
- Journal:
- Disaster Medicine and Public Health Preparedness / Volume 18 / 2024
- Published online by Cambridge University Press:
- 28 February 2024, e38
-
- Article
- Export citation
Site Occupancy in Nontronite Studied by Acid Dissolution and Mössbauer Spectroscopy
-
- Journal:
- Clays and Clay Minerals / Volume 40 / Issue 1 / February 1992
- Published online by Cambridge University Press:
- 28 February 2024, pp. 1-7
-
- Article
- Export citation
